![]() Manyèl itilizatè
Manyèl itilizatè![]()

Deklarasyon Copyright
Okenn inite oswa moun pa ka ekstrè, konpile, tradui oswa repwodui nenpòt sa ki nan manyèl sa a (egzanp: dokimantasyon teknik, lojisyèl, elatriye), ni difize nan nenpòt fòm (ki gen ladan materyèl ak piblikasyon) san pèmisyon alekri Shenzhen Elephant Robotics Technology Co. ., Ltd. (apwe sa yo rele "Elephant Robotics").
Anplis de sa, enfòmasyon sou pwodwi yo ak resous ki gen rapò yo mansyone nan manyèl sa a se pou referans sèlman epi kontni yo kapab chanje san avètisman.
Eksepte jan sa endike ekspreseman nan manyèl sa a, anyen nan manyèl sa a ta dwe entèprete kòm nenpòt garanti oswa garanti pa Elephant Robotics nan pèt pèsonèl, domaj nan pwopriyete, oswa kondisyon fizik pou yon rezon patikilye. Tout dwa rezève!
|
Version |
Deskripsyon |
Remak |
| V 2020.12.31 | Te ajoute foto myCobot【seri estanda】, asanble baz, ak asanble fen | |
| V 2021.02.04 | Te ajoute foto sistèm Kowòdone, MyStudio Software |
Plis paseview
Konsènan manyèl la
Byenveni nan sèvi ak MyCobot robo kolaborasyon ak di ou mèsi pou achte ou.
Manyèl sa a dekri prekosyon pou bon enstalasyon ak itilizasyon MyCobot. Tanpri li manyèl sa a ak lòt manyèl ki gen rapò ak anpil atansyon anvan ou enstale sistèm robo sa a. Apre w fin li, tanpri kenbe l nan yon kote ki an sekirite pou w ka jwenn li nenpòt ki lè. Lekti objè nan manyèl la
Manyèl sa a vize pou:
- enstale.
- Debugger.
- Anplwaye antretyen.
 |
Moun ki enstale / debug / kenbe robo kolaborasyon MyCobot la dwe resevwa fòmasyon nan Robotics Elephant epi yo gen konesans mekanik ak elektwonik ki nesesè pou travay ki anwo a. |
Kouman pou itilize
Yo ta dwe itilize manyèl sa a lè w ap fè travay sa yo:
- Travay enstalasyon: Deplase robo a nan pozisyon travay la epi ranje li nan baz la dapre enstriksyon enstalasyon yo.
- Debogaj: Debogaj robo a nan travay estati.
- Travay antretyen: sistèm robo antretyen regilye pou asire fonksyone nòmal li yo. Lè robo a fonksyone byen akòz enfliyans anviwònman an oswa move operasyon itilizatè a, oswa yon sèten eleman nan sistèm robo a depase lavi sèvis nòmal la, robo a bezwen repare.
Nòt:
- Manyèl sa a aplikab pou itilizatè entènasyonal yo, ansanm ak itilizatè yo nan Hong Kong, Macao ak Taiwan.
- Manyèl sa a pa mete ajou regilyèman. Dat mete ajou se nimewo vèsyon an. Itilizatè yo ka telechaje dènye vèsyon an soti nan ofisyèl la websit Elephant Robot nenpòt ki lè.
Sekirite
Chapit sa a detay enfòmasyon jeneral sou sekirite pou moun ki fè enstalasyon, antretyen ak reparasyon sou robo yo. Tanpri li epi konprann sa ak prekosyon chapit sa a anvan ou manyen, enstale ak itilize li.
1.1 Idantifikasyon danje
Sekirite nan robo kolaborasyon an baze sou site konfigirasyon apwopriye ak itilizasyon robo a, e menm si tout enstriksyon sekirite yo obsève, aksidan an oswa domaj ki te koze pa operatè a ka toujou rive. Se poutèt sa, li trè enpòtan pou konprann danje sekirite yo nan itilizasyon robo, ki se benefisye pou anpeche pwoblèm anvan yo rive.
Tablo 1-2 ~ 4 anba a se danje sekirite komen ki ka egziste nan yon kontèks lè l sèvi avèk robo:
Tablo 1- 2 Danjre sekirite danjere
 |
|
| 1 | Blesi pèsonèl oswa domaj robo ki te koze pa operasyon kòrèk pandan manyen robo. |
| 2 | Se blesi pèsonèl oswa domaj robo ki te koze paske robo a pa fiks jan sa nesesè, pou egzanpample, vis la pa vise oswa sere boulon, ak baz la se pa ase yo stable sipòte robo a pou mouvman gwo vitès, sa ki lakòz robo a pwent desann. |
| 3 | Si w pa fè bon konfigirasyon fonksyon sekirite robo a, oswa enstalasyon zouti pwoteksyon sekirite, elatriye, ka lakòz fonksyon sekirite robo a echwe. |
Tablo 1- 3 Risk sekirite nivo avètisman
 |
|
| 1 | Jwe ak robo a, ou ka frape pa yon robo k ap kouri, oswa yon obstak tankou yon kab lakòz aksidan pèsonèl. |
| 2 | Pèsonèl san otorizasyon chanje paramèt konfigirasyon sekirite yo, sa ki lakòz fonksyon sekirite a echwe oswa danje. |
| 3 | Reyalite ak twou yo koze pa sifas byen file tankou lòt aparèy nan anviwònman travay la oswa efè robo fen. |
| 4 | Robo a se yon machin presizyon ak pedale ka lakòz domaj nan robo a. |
|
5 |
Si clamp se pa nan plas oswa anvan ekipman pou pouvwa a nan robo a fèmen oswa sous gaz la fèmen (li pa detèmine si efèktè nan fen byen fèm kenbe objè a san yo pa tonbe akòz pèt pouvwa). Si clamppa retire objè, li ka lakòz danje, tankou moun ki blese lè yo fè aksidan. |
| 6 | Gen yon risk pou mouvman aksidan nan robo la. Nan okenn sikonstans ou ta dwe kanpe anba nenpòt aks nan robo a! |
| 7 | Yon robo se yon machin presizyon. Si li pa mete san pwoblèm pandan manyen, li ka lakòz Vibration epi li ka lakòz domaj nan eleman entèn yo nan robo a. |
Tablo 1-4 Danje sekirite potansyèl ki ka lakòz chòk elektrik
 |
|
| 1 | Sèvi ak yon kab ki pa orijinal ka reprezante yon danje enkoni. |
| 2 | Kontak ak likid pa ekipman elektrik ka lakòz yon risk pou flit elektrik. |
| 3 | Ka gen yon danje chòk elektrik lè koneksyon elektrik la pa kòrèk. |
| 4 | Asire w ke w okipe travay ranplasman apre w fin koupe kouran kontwolè a ak ekipman ki gen rapò ak debranche kòd kouran an. Si travay la fèt pandan ke pouvwa a sou, li ka lakòz chòk elektrik oswa fonksyone byen. |
1.2 Prekosyon sekirite
Règ sekirite sa yo ta dwe swiv lè w ap itilize robo mwen an:
- mycobiota se ekipman elektrik. Teknisyen ki pa pwofesyonèl pa ka modifye fil la, otreman, li vilnerab a blese aparèy la oswa moun nan.
- Mak DANJE, AVÈTISMAN ki nan manyèl sa a se sèlman siplemantè prekosyon sekirite yo.
- Tanpri itilize mycobiota nan sijè ki abòde lan anviwònman espesifik. Si ou pa, depase espesifikasyon yo ak kondisyon chaj yo pral diminye lavi sa a ki sèvis nan pwodwi a menm domaje ekipman an.
- Anvan opere ak kenbe mycobiota, pèsonèl ki responsab pou enstalasyon, operasyon ak antretyen yo dwe resevwa fòmasyon pou konprann divès kalite prekosyon sekirite ak metòd kòrèk operasyon ak antretyen.
- Pa sèvi ak mycobiota nan anonsamp anviwònman pou yon tan long yo nan lòd pou fè pou evite domaj, myCobot fè pati eleman presizyon elektwonik.
- Pa sèvi ak mycobiota nan yon anviwònman tanperati ki wo. Sifas eksteryè mycobiota a te fè nan résine photosensible kòm matyè premyè, tanperati ki wo pral domaje koki a ak mennen nan echèk.
- Netwayaj ki trè korozif pa apwopriye pou netwaye mycobiota. Konpozan anodize yo pa apwopriye pou netwaye imèsyon.
- Pa sèvi ak robo mwen an san yon baz aliye pou evite domaj nan ekipman an oswa aksidan. myCobot ta dwe itilize nan yon anviwònman fiks ak discrète.
- Pa sèvi ak lòt adaptè pouvwa pou bay myCobot pouvwa Si li domaje akòz itilizasyon yon adaptè ki pa konfòme, li p ap enkli nan sèvis apre-lavant.
- Tanpri pa demonte oswa devise vis yo ak koki yo. Si li louvri, pa gen okenn sèvis garanti ka bay.
- Moun pa ka repare myCobot san fòmasyon pwofesyonèl. Si gen yon pwoblèm ak robo mwen an, tanpri kontakte enjenyè sipò teknik myCobot alè.
- Tanpri konfòme yo ak lwa ki enpòtan yo pou fè fas ak mikobiota kraze, epi pwoteje anviwònman an.
- PA kite timoun yo jwe ak robo mwen poukont yo. Tout pwosesis yo bezwen kontwole pandan y ap kouri. Apre pwosesis yo fini, tanpri fèmen ekipman an san pèdi tan.
- Li entèdi pou modifye oswa retire plak non yo, enstriksyon yo, ikon yo, ak mak sou bra robotik la ak ekipman ki gen rapò a.
- Pa boule lòt chofè pwodwi nan tèminal Atom la. Si aparèy la domaje poutèt sa, li pa pral enkli nan sèvis apre-lavant la.
Tanpri pa sèvi ak robot kolaborasyon Chatbot la pou rezon sa yo. - Aplikasyon medikal ak enpòtan pou lavi yo.
- Nan yon anviwònman ki ka lakòz yon eksplozyon.
- Itilize dirèkteman san evalyasyon risk.
- Ensifizan itilizasyon nivo fonksyon sekirite yo.
- Itilizasyon enkonsistan nan paramèt pèfòmans robo.
Si w gen nenpòt kesyon sou manyèl sa a tanpri vizite epi voye fidbak ou sou:https://www.elephantrobotics.cn.
1.3 Senaryo Itilizasyon
Konsènan mycobiota
2.1 Background
Defann misyon "Enjoy Robots World", Elephant Robotics te fèt ak devlope mycobiota, pi piti ak pi lejè robo kolaborasyon nan mond lan, kenbe pi fò nan fonksyon yo nan robo endistriyèl. Avèk konsepsyon endistriyèl kontra enfòmèl ant ak elegant, pèfòmans ekselan ak pwisan, ak gwo espas devlopman lojisyèl ak pyès ki nan konpitè, myCobot gen posiblite san limit nan ekspansyon aplikasyon an.
Pwototip konsepsyon mycobiota se soti nan robo tout-an-yon sèl ki te lanse pa Elephant Robot nan peyi Lachin nan 2018. Kòm premye robo kolaborasyon entegre nan peyi Lachin, li te genyen 2019 CAIMRS Endistriyèl Robot Innovation Award ak 2019 Gwo teknoloji Robot Anyèl "Inovasyon. Teknoloji pawas", epi li te vann tou nan plis pase 30 peyi nan kay ak aletranje, resevwa lwanj inanim ak rekonesans nan faktori yo nan 500 pi gwo antrepriz nan mond lan.
2.2 Entwodiksyon
mycobiota se pi piti ak pi lejè robo kolaborasyon sis-aks nan mond lan, ansanm ki te pwodwi pa Elephant Robotics ak M5Stack. Li se pi plis pase yon zouti pwodiktivite plen imajinasyon, ka pote sou devlopman segondè selon demand itilizatè yo reyalize pèsonalizasyon pèsonalize.
Avèk yon pwa 850g, yon chaj 250g, ak yon longè bra 350mm, myCobot se kontra enfòmèl ant men pwisan, pa ka sèlman matche ak yon varyete de efèktè fen pou adapte yo ak diferan kalite senaryo aplikasyon tou sipòte devlopman segondè nan. lojisyèl milti-platfòm pou satisfè bezwen divès senaryo tankou rechèch syantifik ak edikasyon, kay entelijan, endistri limyè, ak aplikasyon komèsyal yo.
myCobot - Paramèt debaz
| Degre Libète | 6 |
| Chaj | 250g |
| Bra span | 350mm |
| Reyon travay | 280mm |
| Repetebilite | ± 0.5mm |
| Pwa | 850g |
| Antre pouvwa | 8V,5A |
| Kondisyon travay | -5 ° ~ 45 ° |
| Kominikasyon | USB Kalite-C |
2.3 Karakteristik
- Inik Endistriyèl Design & ekstrèmman kontra enfòmèl ant
mycobiota se yon konsepsyon modilè entegre ak sèlman peze 850g ki trè fasil pou pote. Estrikti jeneral kò li yo se kontra enfòmèl ant ak mwens pyès rezèv epi yo ka byen vit demonte epi ranplase yo reyalize ploge ak jwe. - Segondè konfigirasyon & Ekipe ak 2 ekran
myCobot gen 6 motè sèrvo pèfòmans-wo ak repons rapid, ti inèsi, ak lis
wotasyon. Kò a pote 2 ekran ekspozisyon sipòte bibliyotèk la fè jèn pou montre aplikasyon an elaji
sèn pi fasil ak klèman. - Lego Connector & Dè milye de aplikasyon ekolojik M5STACK
Baz la ak fen mycobiota yo ekipe ak yon Lego Connector, ki se apwopriye pou devlopman nan divès kalite ekipman miniature entegre. Baz li kontwole pa M5STACK Basic, epi dè milye de ka aplikasyon yo ka itilize dirèkteman. - Blocky Programming & Sipòte ROS Endistriyèl
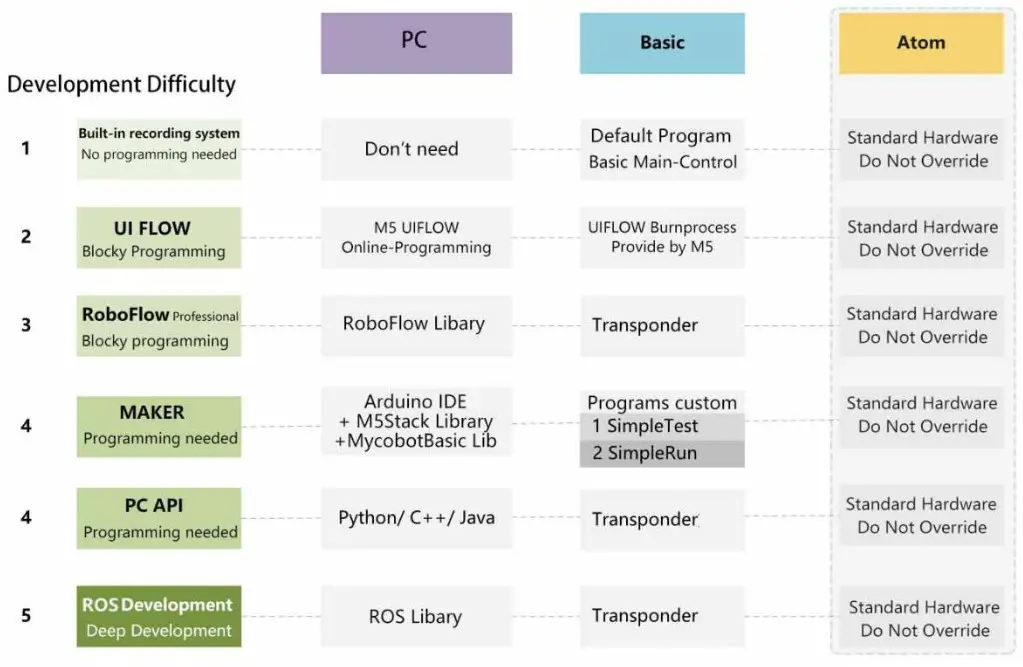
Sèvi ak UIFlow lojisyèl pwogramasyon vizyèl, pwogramasyon robo mwen an se senp epi fasil pou tout moun.
Ou kapab tou itilize RoboFlow, lojisyèl robo endistriyèl soti nan Elephant Robotics, sipòte plizyè modil fonksyonèl Arduino + ROS sistèm sous louvri. - Track Anrejistreman & Aprann alamen
Debarase m de mòd tradisyonèl ekonomize pwen an, myCobot sipòte trennen ansèyman jijman pou anrejistre tras ki sove a epi li ka sove jiska 60 minit diferan Tracks ki fè li fasil epi amizan pou nouvo jwè yo aprann.
2.4 Patant
Patant ki gen rapò sou robo mwen an
|
Non. |
Sètifika No. | Non patant | Patant No. |
Patant |
| 1 | Nimewo 8194138 | Lyen mekanik bra ak yon bra mekanik | ZL 2018 20017484.4 | Sou entènèt jwèt Elephant Robotics |
| 2 | Nimewo 8186088 | Konektè jwenti bra mekanik ak yon bra mekanik | ZL 2017 21700594.2 | Sou entènèt jwèt Elephant Robotics |
| Non. | Pwodwi | Kalite patant | Tit |
Patant No. |
| 1 | Bra robotik ki lejè | Patant aparans | Jwe sou entènèt jwèt gratis Bra robo kolektif | 2020030683471.3 |
|
Non. |
Tit envansyon |
Nimewo Aplikasyon an |
| 1 | Metòd ak sistèm pou kenbe pwèstans robo, trennen, ak ansèyman | ZL 2018 1 1634649.3 |
| 2 | Yon metòd deteksyon kolizyon sou entènèt robo ak sistèm ki baze sou modèl momantòm | ZL 2019 1 0030748.9 |
| 3 | Yon jan de robot dinamik paramètre idantifikasyon metòd endepandan de akselerasyon angilè jwenti | ZL 2019 1 0773865.4 |
Materyèl
3.1 Kontwolè ak Actuator
3.1.1 M5STACK Debaz Kontwolè Prensipal
M5STACK BASIC Twous, tankou omonim li yo, se yon twous pou kòmanse nan mitan seri twous devlopman M5STACK.
Li se yon aparèy modilè, anpile, évolutive, ak pòtab ki mache ak yon nwayo ESP-32, ki fè li sous ouvè, pri ki ba, plen fonksyon, epi fasil pou devlopè yo okipe devlopman nouvo pwodwi sou tout s.tages enkli konsepsyon sikwi, konsepsyon PCB, lojisyèl, konsepsyon mwazi, ak pwodiksyon. Twous Debaz sa a bay yon pri zanmitay ak resous konplè ki fè li yon bon twous pou kòmanse pou w eksplore IoT.
Si ou vle eksplore fason ki pi rapid nan pwototip IoT, tablo devlopman M5STACK la se solisyon pafè a. Pa tankou lòt, tablo devlopman M5STACK la trè efikas, kouvri ak yon ka endistriyèl ak tablo devlopman ki baze sou ESP32. Li entegre ak modil Wi-Fi ak Bluetooth epi li gen yon debaz ak 16MB SPI Flash. Ansanm ak plis pase 30 modil M5Stack ki ka anpile, plis pase 40 inite ekstansib, ak diferan nivo langaj pwogram, ou ka kreye ak verifye pwodwi IoT ou nan yon ti tan.
Platfòm devlopman sipò ak langaj pwogramasyon: Arduino, Blocky lang ak UIFlow, Micropython. Kèlkeswa nivo konpetans pwogram ou genyen, M5STACK ta gide ou nan chak etap nan fason pou reyalize lide ou kòm byen ke pwodiksyon final la. Si ou janm jwe ak ESP8266, ou ta reyalize ke ESP32 se yon amelyorasyon pafè soti nan ESP8266. Nan konparezon, ESP32 gen plis GPIOs, plis entrain analòg, de pwodiksyon analòg, plizyè periferik siplemantè (tankou yon UART rezèv). Platfòm ofisyèl ki devlope ESP-IDF te transplante'tèt ak FreeRTOS. Avèk sistèm eksplwatasyon doub-nwayo ak an tan reyèl, ou ka jwenn kòd plis òganize ak yon processeur gwo vitès.
M5STACK Basic se konpoze de de pati separe. Pati anlè a gen tout kalite processeurs, chips, ak kèk lòt konpozan plas. M-BUS priz, ak broch extensible sou tou de bò yo.
3.1.1.1 Karakteristik pwodwi
- ESP32 ki baze sou
- Oratè entegre, bouton, LCD koulè, bouton pouvwa/reset
- Plas pou kat TF (16G gwosè maksimòm)
- Aspirasyon mayetik nan do a
- Broch ekstansibl ak twou
- M-Bus Socket & Pins
- Platfòm pwogram: UIFlow, MicroPython, Arduino
3.1.1.2 Paramèt
| Resous | Paramèt |
| ESP32-D0WDQ6 | 240MHz doub-nwayo, 600 DMIPS, 520KB SRAM, Wi-Fi, doub-mòd Bluetooth |
| Flash | 16MB |
| Antre pouvwa | 5V @ 500mA |
| Port | KaliteC x 1, GROVE(I2C+I/0+UART) x 1 |
| Nwayo Anba Port | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS ekran | 2 pous, 320 × 240 kolore TFT LCD, ILI9342C,Brightness853nit |
| Oratè | 1W-0928 |
| Bouton | Bouton Custom x 3 |
| Antèn | 2.4G 3D antèn |
| Tanperati Fonksyònman | 32 ° F a 104 ° F (0 ° C a 40 ° C) |
| Pwa nèt | 47.2g |
| Pwa brit | 93g |
| Gwosè pwodwi | 54 x 54 x 18mm |
| Gwosè pake | 95 x 65 x 25mm |
| Ka materyèl | Plastik (PC) |
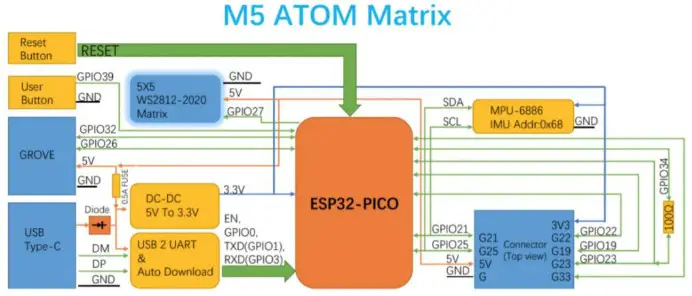
3.1.2 M5STACK Atom
ATOM Matrix, ki gen yon gwosè sèlman 24 * 24mm, se tablo devlopman ki pi kontra nan seri twous devlopman M5Stack. Li bay plis broch GPIO epi li trè apwopriye pou devlopman aparèy ki sou la men ak tipòtrè entegre.
Kontwòl prensipal la adopte chip ESP32-PICO-D4, ki vini entegre ak teknoloji Wi-Fi ak Bluetooth e li gen 4MB memwa flash SPI entegre. Tablo Atom bay yon enfrawouj ki ap dirije ansanm ak 5 * 5 RGB ki ap dirije matris la sou panèl la, yon Capteur IMU entegre (MPU6886), ak yon koòdone HY2.0. Yon bouton pwogramasyon jeneral yo bay anba matris RGB Led pou pèmèt itilizatè yo ajoute sipò opinyon nan divès pwojè yo. Koòdone USB abò a (Type-C) pèmèt telechaje rapid pwogram ak ekzekisyon. Yon twou vis M2 bay sou do a pou aliye tablo a.
Nòt: Lè w ap itilize manipilatè a, tanpri evite boule firmwèr la nan ATOM nan fen manipilatè a. Aparèy la sèlman sipòte firmwèr orijinal nou an.
Tanpri, tanpri konprann deranjman an pote ba ou.
3.1.2.1 Karakteristik
- ESP32 ki baze sou PICO
- Bouton pwogramasyon
- 5 * 5 RGB dirije panèl matris (WS2812C)
- Bati-an Enfra-wouj ki ap dirije
- Bati-an MPU6886 Capteur inèrsyèl
- Broch ekstansibl ak twou
- Platfòm pwogram: Arduino UIFlow
3.1.2.2 Spesifikasyon
| Resous | Paramèt |
| ESP32 | 240MHz doub-nwayo, 600 DMIPS, 520KB SRAM, Wi-Fi, doub-mòd Bluetooth |
| Flash | 4MB |
| Antre pouvwa | 5V @ 500mA |
| Port | KaliteC x 1, GROVE(I2C+I/0+UART) x 1 |
| PIN entèfas | G19, G21, G22, G23, G25, G33 |
| RGB dirije | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Transmisyon enfrawouj |
| Bouton | Anba koutim x 1 |
| Antèn | 2.4G 3D antèn |
| Tanperati Fonksyònman | 32 ° F a 104 ° F (0 ° C a 40 ° C) |
| Pwa nèt | 3g |
| Pwa brit | 14g |
| Gwosè pwodwi | 24 x 24 x 14 mm |
| Gwosè pake | 24 x 24 x 14 mm |
| Ka materyèl | Plastik (PC) |
3.1.3 Servo Motor
myCobot pataje 6 servos segondè-pèfòmans nan 6 jwenti ak advan latages nan repons rapid, ti inèsi, wotasyon lis, koupl ki estab, elatriye.
| Resous | Paramèt |
| Gwosè | 23.2 * 12.1 * 28.5mm |
| Antre pouvwa | 4.8 ~ 7.4V |
| Tanperati Fonksyònman | -15 ~ 70 ° |
| Rated koupl | 1.5kg.cm@6V |
| Bloke koupl | 4.5kg.cm@6V |
| Ang wotasyon | 300 ° (ang ka limite pa lojisyèl) |
3.2 Estrikti mekanik
3.2.1 Gwosè ak ranje k ap travay
A)mycobiota
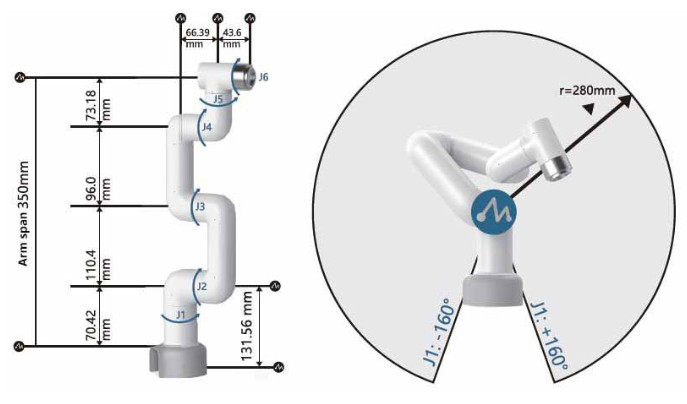
myCobot -Tablo ranje mouvman jwenti
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
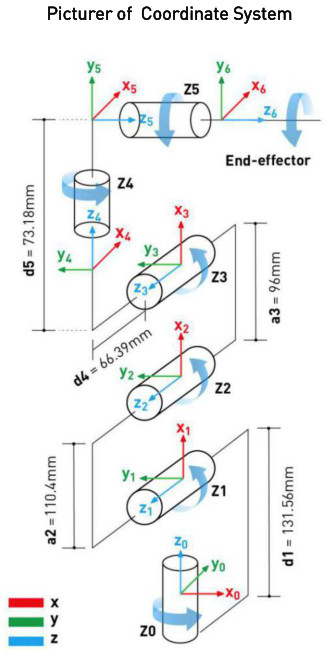
Foto nan sistèm kowòdone
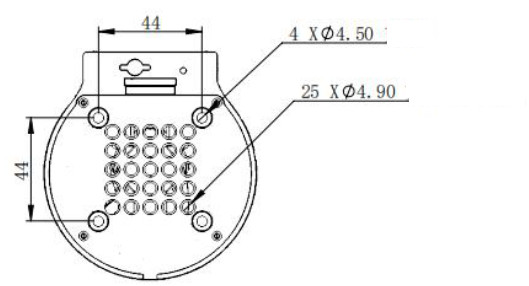
B) Asanble baz
Baz la konpatib ak tou de twou konpozan Lego-teknoloji ak twou nan twou vis.
C)Fin Asanble
Fen a se konpatib ak tou de twou a eleman Lego-tech ak fil la vis.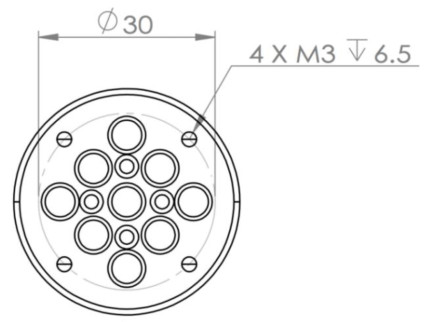
3.2.2 Debalaj ak Enstalasyon
3.2.2.1 Debake
Nòt: Apre bwat anbalaj la an plas, tanpri konfime ke anbalaj robo a entak epi li pa domaje. Si gen nenpòt domaj, tanpri kontakte konpayi lojistik la ak founisè lokal la nan tan. Apre debalaj, tanpri tcheke atik aktyèl yo nan bwat la dapre lis atik la.

| myCobot【ansanm estanda】 | -myCobot-280 -Bwochi -Ekipman pou pouvwa -USB-Tip C -Kavalye -M4 * 35, vis asye pur -Kle egzagòn |
Tanpri enstale sistèm robo a nan yon anviwònman ki satisfè kondisyon ki dekri nan tablo a pou fè egzèsis ak kenbe pèfòmans machin nan epi sèvi ak li san danje.
Anviwònman ak Kondisyon Fonksyònman
| Tanperati | -10 ℃ ~ 45 ℃ |
| Imidite relatif | 20% ~ 70% |
| Andedan kay la / Deyò | Andedan kay la |
| Yon lòt kondisyon anviwònman an | -Evite limyè solèy la. -Kenbe lwen pousyè, lafimen lwil, sèl, fich fè, elatriye. -Kenbe lwen likid ak gaz ki ka pran dife ak korozif. -Pa kontakte ak dlo. -Pa transmèt chòk, Vibration, elatriye. -Kenbe lwen sous entèferans elektwomayetik fò. |
3.2.2.2 Enstalasyon
Pwa aktyèl la nan robo nan kolaborasyon mycobiota se 850g. Lè w konsidere mouvman robo a, sant gravite a ap deplase pandan robo a ap deplase. Se poutèt sa, robo a bezwen yo dwe fiks sou yon baz solid yo dwe itilize nòmalman.
Gwosè koòdone nan baz robo: twou a fikse pedestal se koòdone ki fikse robo a nan lòt baz oswa avyon. Gwosè twou espesifik yo montre jan sa a. Li se 4 nan twou ak yon dyamèt 4.5mm, ki ka fiks ak boulon M4.
Asire w ke gen yon twou fil korespondan sou baz fiks la anvan enstale. Anvan ou enstale ofisyèlman, tanpri konfime:
- Anviwònman yo dwe enstale konfòm ak kondisyon ki anwo yo.
- Pozisyon enstalasyon an pa mwens pase seri travay la nan robo a, epi gen ase espas
pou enstalasyon, itilizasyon, antretyen ak reparasyon. - Mete kanpe la nan bon pozisyon.
- Zouti ki gen rapò ak enstalasyon yo pare, tankou vis, kle, elatriye.
Apre konfime sa ki anwo a, deplase robo a nan sifas la aliye nan baz la, ajiste pozisyon nan robo a, epi fè aliman twou a fikse nan baz la robo ak twou a sou sifas la aliye nan baz la.
Nòt: Lè w ap ajiste pozisyon robo a sou baz aliye a, tanpri evite pouse robo a dirèkteman sou sifas aliye baz la pou evite reyur. Lè w ap deplase robo a manyèlman, tanpri eseye evite aplike yon fòs ekstèn nan pati ki fèb nan kò robo a pou evite domaj nesesè nan robo a.
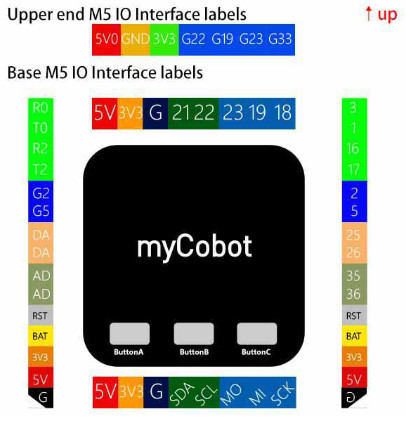
3.3 Elektwonik ak elektrik
myCobot gen twa tèminal ekstèn. Yo se tèminal ekstèn nan M5Stack Basic sou baz la, de tèminal Grove tou pre priz pouvwa a ak broch tèminal ekstèn nan jwenti M5Stack Atom J6 la.
a) M5STACK dyagram elektrik de baz

b) Dyagram sikwi atomik M5STACK
c) Dyagram entèfas IO
Lojisyèl
Pou mizajou lojisyèl, tanpri tcheke Github nou an dabò. https://github.com/elephantrobotics/myCobot
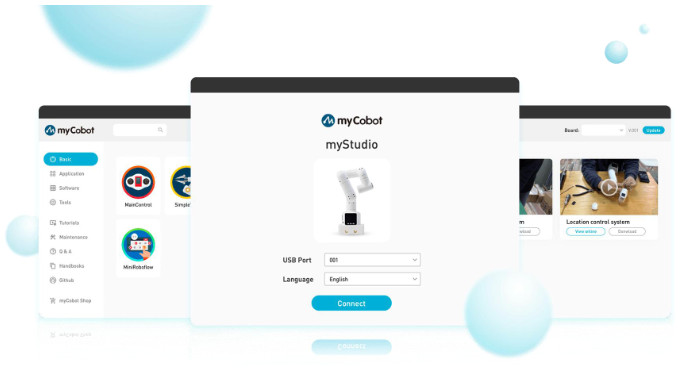
4.1 Mizajou Firmware ak Rekiperasyon - estidyo mwen an
estidyo mwen an se yon platfòm yon sèl-stop pou robo nan robo mwen / mycobiota.
Fonksyon prensipal estidyo mwen an se: 1) Mete ajou firmwèr la; 2) Bay leson patikilye videyo sou kòman yo sèvi ak robo a; 3) Bay enfòmasyon antretyen ak reparasyon (tankou leson patikilye videyo, Q&A, elatriye).
Lyen ki mennen nan videyo youtube sou myStudio se: https://youtu.be/Kr9i62ZPf4w
Si ou bezwen amelyore oswa kenbe mycobiota ou a, asire w ke anviwònman devlopman an mete kanpe. Si ou pa, tanpri enstale chofè pò seri a an premye epi eseye sèvi ak lojisyèl an. Lyen telechaje a se jan sa a:
Ofisyèl websit: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Si w itilize yon sistèm Windows, tanpri chwazi "my studio-windows.exe" pou telechaje, epi dekonprime li nan katab pwojè w la. Fè atansyon pou pa sèvi ak li ak chemen konplèks, ki ka mennen nan pwoblèm ak chemen ki pa rekonèt.
Si anviwònman devlopman ou a deja mete kanpe, ou ka dirèkteman louvri file "myCobot. exe".
Apre ouvèti, koòdone a se jan sa a: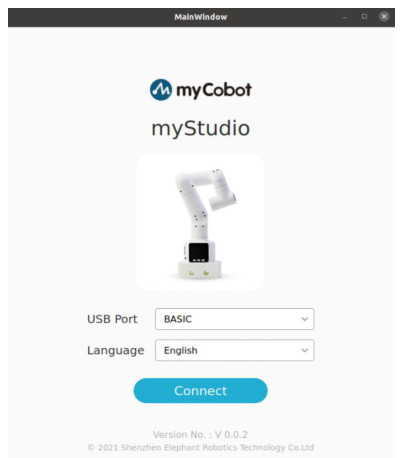
Konekte myCobot ou a ak "Debaz" oswa "Atom", chwazi "lang" epi klike sou "Konekte" pou antre nan koòdone prensipal yo montre anba a: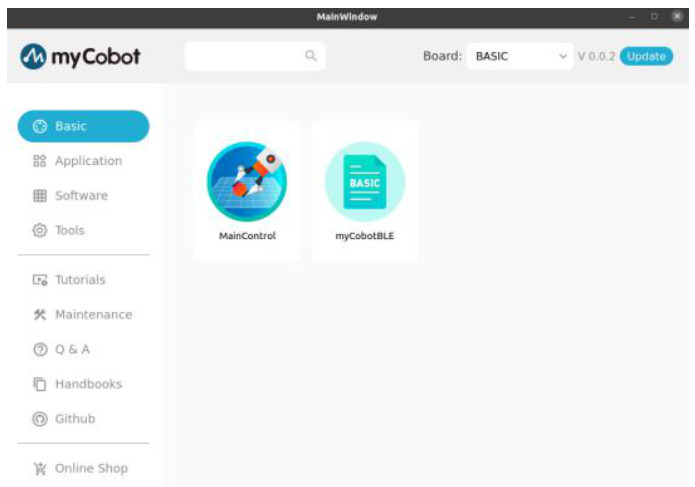
Si ou konekte tou de Debaz ak Atom, Chwazi lojisyèl an ou vle boule ankò nan ba Komisyon Konsèy la nan kwen anwo dwat, ak Lè sa a klike sou Debaz oswa Zouti yo chwazi firmwèr ou vle boule.
4.2 Anrejistreman Track entegre
M5STACK Debaz tablo kontwòl prensipal gen 3 bouton sipòte pwogram koutim ak ekri done. Pwogram sa a se sous louvri, ou ka tcheke GitHub nou an.
Trennen Demonstrasyon ansèyman
- Anrejistreman: Apre w fin antre nan mòd anrejistreman an, chwazi kote depo anrejistreman an

Bouton A: Sere nan Ram
Bouton B: Sere sou kat memwa
Bouton C: Sòti mòd anrejistreman an - Kòmanse anrejistreman

Apre w fin chwazi kote depo a, manyèlman trennen bra robotik la pou konplete aksyon sib la, Lè sa a, aksyon an pral anrejistre epi estoke. - Jwe

Bouton A: Kòmanse jwe aksyon ki anrejistre a
Bouton B: Pran yon poz
Bouton C: Sòti Lektur
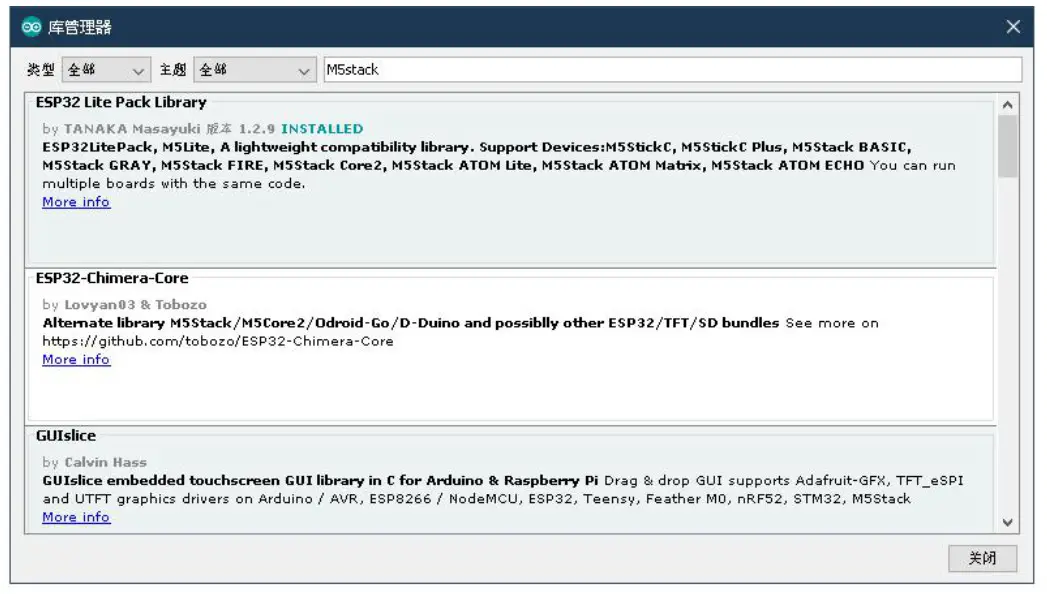
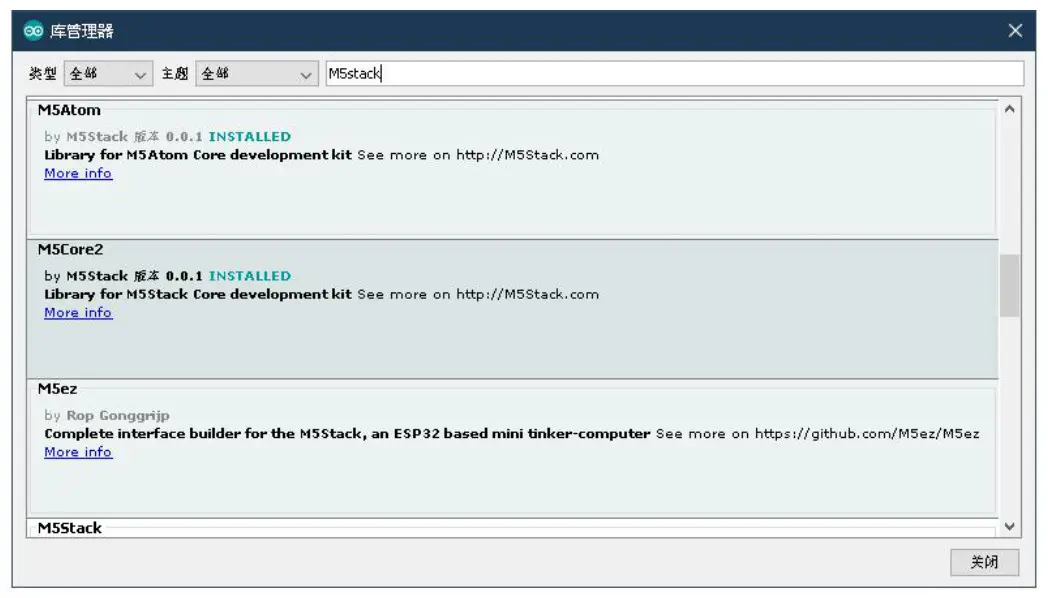
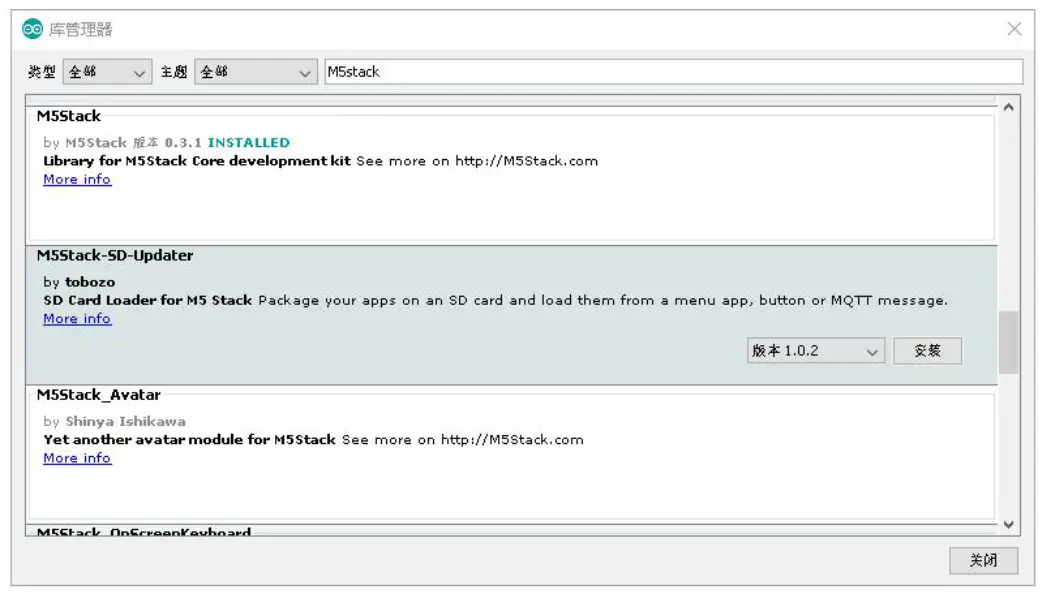
4.3 Bibliyotèk Arduino
Yon bibliyotèk se yon koleksyon kòd ki pèmèt ou konekte ak itilize fasilman detèktè, ekspozisyon, modil, elatriye.ample, bati-an LiquidCrystal bibliyotèk ka reyalize kominikasyon fasil ak karaktè LCD montre.
Fonksyon tablo devlopman Arduino ka elaji lè w ap itilize bibliyotèk la. Paske nan bibliyotèk la, nou ka fasilman reyalize kolaborasyon ki genyen ant Arduino ak pyès ki nan konpitè ekstèn oswa kominikasyon done. Arduino IDE pre-enstale ak yon seri de bibliyotèk estanda files. An menm tan an, ou ka tou enstale ak enpòte bibliyotèk twazyèm pati (tankou bibliyotèk sous louvri telechaje sou entènèt la) nan Arduino IDE. Ou ka menm kreye bibliyotèk epi enpòte yo nan Arduino IDE. Egzistans bibliyotèk la ede itilizatè yo kontoune kontni plis espesyalize tankou rejis ak endikasyon adrès, sa ki diminye anpil difikilte pou devlopman. Si ou bezwen konnen kijan pou ajoute bibliyotèk twazyèm pati pou enstalasyon ARDUINO IDE, tanpri al gade adrès enstalasyon chofè a ak metòd: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development Ou ka tcheke tou Github nou an pou plis enfòmasyon. https://github.com/elephantrobotics/myCobot
Ou ka tcheke tou Github nou an pou plis enfòmasyon. https://github.com/elephantrobotics/myCobot
Jan sa a:
4.4 API entèfas ak kominikasyon
- UNFLOW
- Arduino
- mikwo piton
- FreeROTS
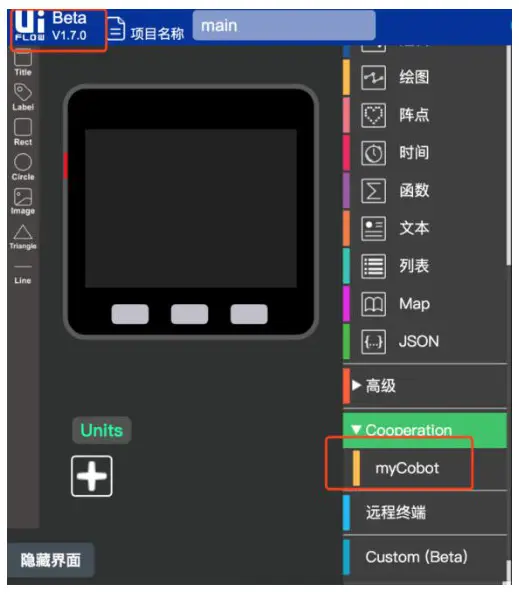
4.4.1 UIFlow
Sèvi ak UIFlow Beta Version ak Chwazi Koperasyon - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS se sou devlopman epi yo pral mete ajou dapre pwogrè a.
Depi 12.31:
- Mete ajou konfigirasyon ROS la pou swa Python2 oswa 3 ka enstale kounye a.
- Chanje pou antre manyèlman pò seri olye pou itilizatè Windows yo ka kouri dirèkteman.
- Mete ajou nouvo dokiman spesifikasyon Entèfas la nan Bibliyotèk API, tanpri gade "README".
- 4.6 Kalibrasyon jwenti
Si mobot ou a bezwen kalibre jwenti, tanpri itilize firmwèr mycobiota oswa Arduino ak lòt zouti pou boule Kalibrasyon an premye.
Apre w fin telechaje firmwèr la, yo montre koòdone debaz la anba a:
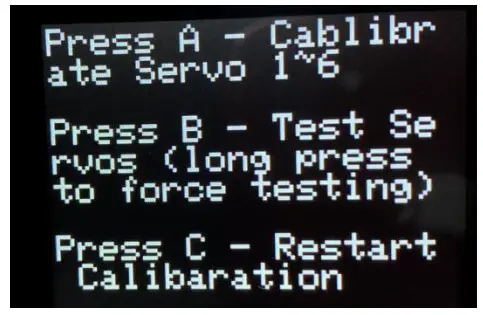
Nan moman sa a, Thorne J1 nan pozisyon zewo estanda aliman ak Groove a, epi peze bouton an A (bouton gòch la), Lè sa a, J1 a pral soti nan yon mouvman dinamik nan yon pozisyon estatik epi yo dwe fiks nan pozisyon sa a zewo estanda.
Repete etap sa yo apre metòd sa a pou mete kanpe J2-J6 ki rete a. Apre J6 mete, peze yon kle a (kle gòch la) ankò pou konsève pou tout Anviwònman yo.
Lè tout jwenti yo tounen nan pozisyon zewo estanda a, ou bezwen tou tcheke si myCobot ka opere nòmalman. Peze bouton B (bouton mitan an), Lè sa a, robo mwen an pral detekte J1 a J6 nan sekans.
Tanpri asire ke pa gen okenn obstak oswa entèferans pèsonèl nan seri a opere yo nan lòd yo anpeche domaj nan ekipman ak pèsonèl pandan tès la.
Programmation vizyèl ak lojisyèl endistriyèl
5.1 Vizyèl Programming Software-UIFlow
Pou itilizasyon detaye, tanpri jwenn manyèl operasyon UI Flow nan lyen ki anba a.
M5STACK Debaz: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK Atom: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Endistriyèl Visualization Programming Software-RoboFlow
myCobot sipòte RoboFlow opere pa Elephant Robotics robo kolaborasyon endistriyèl. Pwosesis operasyon RoboFlow se senp epi fasil pou itilize, ak koòdone entèaktif la klè ak fasil pou konprann, ki se pratik pou itilizatè yo byen vit metrize ak itilize, epi efektivman ede itilizatè yo ranpli operasyon ak pwogramasyon travay avèk efikasite. Menm itilizatè inisyasyon ka reyalize tou fonksyon sib atravè operasyon senp.
Pou itilizasyon detaye, tanpri jwenn manyèl operasyon RoboFlow nan lyen ki anba a.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Sèvis apre-lavant
- Sèvis retounen limite a sa sèlman machandiz ki pa louvri nan 7 jou apre dat la resevwa nan lojistik nan pwodwi yo. Kliyan an dwe peye machandiz oswa lòt risk ki genyen an retou.
- Kliyan yo ta dwe bay fakti acha a ak kat garanti kòm sètifikasyon garanti a lè yo mande yon garanti.
- Elephant Robotics pral responsab pou defo pyès ki nan konpitè pwodwi ki te koze pa itilizasyon nòmal pandan peryòd garanti a.
- Peryòd garanti a kòmanse nan dat acha a oswa dat resi lojistik la.
- Pati ki defo nan pwodwi yo pral posede pa Elephant Robotics, epi pri apwopriye a pral chaje si sa nesesè.
Si ou bezwen aplike pou sèvis garanti, tanpri kontakte sèvis kliyan nou an premye pou konfime enfòmasyon an detay. Sa ki anba la a se kondisyon garanti nan eleman detaye:
Nòt: Si gen yon konfli ak ti liv pwodwi a, Manyèl itilizatè a va genyen.
a) Sever motè
| Peryòd garanti | Sèvis garanti |
| ≤1 mwa | Elephant Robotics ofri yon nouvo motè sever gratis epi li pote machandiz la. |
| 1-3 mwa | Elephant Robotics ofri yon nouvo motè sever gratis, koutim yo dwe pote machandiz la |
| ≥3 mwa | Kliyan yo bezwen achte li tèt yo. |
b) Pati elektrik (M5 Materyèl)
| Peryòd garanti | Sèvis garanti |
| ≤3 mwa | Kliyan yo bezwen voye li tounen apre demonte, Elephant Robotics dwe voye yon nouvo pou gratis epi pote machandiz la soti ak lakay ou. |
| 3-6 mwa | Kliyan yo bezwen voye li tounen apre yo fin demonte epi pote machandiz la soti ak lakay yo, Elephant Robotics pral voye yon nouvo pou gratis. |
| ≥6 mwa | Kliyan yo bezwen achte li tèt yo. |
c) Pati Estrikti, ki gen ladan Pati Shell
| Peryòd garanti | Sèvis garanti |
| ≤1 ane | Elephant Robotics ofri nouvo konpozan gratis yon fwa, koutim yo dwe pote machandiz la. |
| ≥1 ane | Kliyan yo bezwen achte li tèt yo. |
Pandan peryòd garanti a nan pwodwi a delivre, konpayi an sèlman repare defayans yo ki rive pandan itilizasyon nòmal nan robo a gratis. Sepandan, nan ka sa yo, yo pral peye kliyan an pou reparasyon (menm pandan peryòd garanti a):
- Domaj oswa fonksyone byen ki te koze pa itilizasyon kòrèk ak itilizasyon move diferan de manyèl la.
- Echèk ki te koze pa demonte san otorizasyon pa kliyan an.
- Domaj ki te koze pa move ajisteman oswa reparasyon san otorizasyon.
- Dega se dezas natirèl tankou tranblemanntè ak inondasyon.
tanpri estrikteman swiv enstriksyon yo nan manyèl sa a ak manyèl ki gen rapò ak opere robo a.
Q&A:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
K: du a pa t 'kapab jwenn aparèy ki koresponn lan?
A: Aparèy la ka devlope sèlman apre yo fin mete anviwònman an devlopman ak enstale bibliyotèk pwojè ki koresponn lan.
K: du a pa t kapab konpile sample pwogram byen pou jwenn aparèy korespondan an?
A: Bibliyotèk pwojè obligatwa a pa enstale oswa gen yon konfli ak bibliyotèk pwojè a. Tanpri tcheke si bibliyotèk pwojè a enstale kòrèkteman an premye. Si li enstale kòrèkteman epi li toujou pa ka konpile, tanpri réinstaller anviwònman devlopman Arduino.
K: Aparèy la echwe pou fonksyone byen apre li fin boule firmwèr la nan ATOM?
A: firmwèr pou tèminal ATOM bezwen sèvi ak firmwèr faktori nou an. Si nenpòt lòt firmwèr boule aksidantèlman, ou ka chwazi "myCobot ATOM ATOMMAIN pou boule tèminal ATOM la.
K: Gen yon ti tranbleman nan pozisyon vètikal la men se pa nan eta mouvman an?
A: Tanpri tcheke si robo mwen an nan yon eta vètikal. mycobiota pa afekte pa gravite nan yon eta vètikal, anilasyon mekanik ka lakòz ti wobbles. Men, pa pral gen tranbleman lè li soti nan eta vètikal la. Vitès la rekòmande se 400-500 nan yon eta vètikal.
K: Èske sistèm ROS a chaje pita?
A: ROS se sous louvri epi yo pral mete ajou nan Github nou an. Pa gen okenn chaj pou amelyorasyon firmwèr.
Kontakte nou
Si ou gen nenpòt bezwen pou èd, tanpri kontakte nou montre jan sa a.
Shenzhen elefan robotik teknoloji co, Ltd
Adrès: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, Lachin
Imèl: support@elephantrobotics.com
Telefòn: +86(0755)-8696-8565 (jou travay 9:30-18:30)
Websit: www.elephantrobotics.com
Twitter: CobotMy

Dokiman / Resous
 |
Elephant Robotics MyCobot Sis-Axis Collaborative Robot Arm [pdfManyèl Itilizatè MyCobot, Sis-Axis Collaborative Robot Arm, MyCobot Six-Axis Collaborative Robot Arm, V20210309 |



