![]() Uživatelská příručka
Uživatelská příručka![]()

Prohlášení o autorských právech
Žádná jednotka ani jednotlivec nesmí extrahovat, kompilovat, překládat nebo reprodukovat jakýkoli obsah této příručky (např.: technická dokumentace, software atd.), ani šířit v jakékoli formě (včetně materiálů a publikací) bez písemného povolení společnosti Shenzhen Elephant Robotics Technology Co. ., Ltd. (dále jen „Elephant Robotics“).
Kromě toho jsou informace o produktu a související zdroje uvedené v této příručce pouze pro referenci a obsah se může bez upozornění změnit.
Kromě toho, co je v této příručce výslovně uvedeno, nic v této příručce by nemělo být vykládáno jako jakákoli záruka nebo záruka společnosti Elephant Robotics na osobní ztrátu, poškození majetku nebo způsobilost pro určitý účel. Všechna práva vyhrazena!
|
Verze |
Popis |
Poznámka |
| V 2020.12.31 | Přidán picturer myCobot【standard set】, Base Assembly a End Assembly | |
| V 2021.02.04 | Přidán obrázek systému souřadnic, MyStudio Software |
Nadview
O manuálu
Vítejte v používání kolaborativního robota MyCobot a děkujeme za váš nákup.
Tato příručka popisuje opatření pro správnou instalaci a používání MyCobot. Před instalací tohoto robotického systému si prosím pečlivě přečtěte tento návod a další související návody. Po přečtení jej prosím uschovejte na bezpečném místě, abyste k němu měli kdykoli přístup. Čtení předmětů návodu
Tato příručka je zaměřena na:
- instalátor.
- Debugger.
- Personál údržby.
 |
Ti, kdo instalují/ladí/udržují kolaborativního robota MyCobot, musí být vyškoleni v Elephant Robotics a mít mechanické a elektronické znalosti potřebné pro výše uvedenou práci. |
Jak používat
Tento návod by se měl používat při provádění následujících prací:
- Instalační práce: Přesuňte robota do pracovní polohy a upevněte jej k základně podle pokynů k instalaci.
- Ladění: Ladění robota do pracovního stavu.
- Údržbářské práce: pravidelná údržba robotického systému pro zajištění jeho normálního fungování. Když robot selže v důsledku vlivů prostředí nebo nesprávného provozu uživatele nebo určitá součást robotického systému překročí běžnou životnost, je třeba robot opravit.
Poznámka:
- Tato příručka platí pro mezinárodní uživatele a také pro uživatele v Hong Kongu, Macau a Tchaj-wanu.
- Tato příručka není pravidelně aktualizována. Aktualizované datum je číslo verze. Uživatelé si mohou stáhnout nejnovější verzi z oficiálního webu webstránky Elephant Robot kdykoli.
Zabezpečení
Tato kapitola uvádí obecné bezpečnostní informace pro osoby, které na robotech provádějí instalaci, údržbu a opravy. Před manipulací, instalací a používáním si prosím přečtěte a pochopte obsah a bezpečnostní opatření této kapitoly.
1.1 Identifikace nebezpečí
Bezpečnost kolaborativního robota je založena na předpokladu správné konfigurace a používání robota a i při dodržení všech bezpečnostních pokynů může stále dojít ke zranění nebo škodě způsobené operátorem. Proto je velmi důležité porozumět bezpečnostním rizikům používání robota, což je výhodné pro prevenci problémů dříve, než nastanou.
V tabulkách 1-2~4 níže jsou uvedena běžná bezpečnostní rizika, která mohou existovat v souvislosti s používáním robotů:
Tabulka 1-2 Nebezpečná bezpečnostní rizika
 |
|
| 1 | Zranění osob nebo poškození robota způsobené nesprávnou obsluhou během manipulace s robotem. |
| 2 | Zranění osob nebo poškození robota je způsobeno tím, že robot není upevněn tak, jak je požadováno, napřample, šroub není zašroubovaný nebo utažený a základna není dostatečná k tomu, aby stabilně podpírala robota pro rychlý pohyb, což způsobuje převrácení robota. |
| 3 | Neprovedení správné konfigurace bezpečnostní funkce robota nebo instalace bezpečnostních ochranných nástrojů atd. může způsobit selhání bezpečnostní funkce robota. |
Tabulka 1- 3 Bezpečnostní rizika na úrovni varování
 |
|
| 1 | Hrajte si s robotem, můžete být zasaženi běžícím robotem nebo být zakopnuti o překážku, jako je kabel, a způsobit zranění. |
| 2 | Neoprávněný personál změní parametry konfigurace zabezpečení, což způsobí selhání nebo ohrožení bezpečnostní funkce. |
| 3 | Škrábance a proražení jsou způsobeny ostrými povrchy, jako jsou jiná zařízení v pracovním prostředí nebo koncový efektor robota. |
| 4 | Robot je přesný stroj a šlapání může způsobit poškození robota. |
|
5 |
Pokud třamp není na svém místě nebo před vypnutím napájení robota nebo vypnutím zdroje plynu (není určeno, zda koncový efektor pevně drží předmět, aniž by spadl kvůli ztrátě napájení). Pokud třampPokud předmět neodstraníte, může způsobit nebezpečí, například zranění osob při nárazu. |
| 6 | Existuje riziko náhodného pohybu robota. V žádném případě nestůjte pod žádnou osou robota! |
| 7 | Robot je přesný stroj. Pokud není během manipulace umístěn hladce, může způsobit vibrace a může způsobit poškození vnitřních součástí robota. |
Tabulka 1- 4 Možná bezpečnostní rizika, která mohou vést k úrazu elektrickým proudem
 |
|
| 1 | Použití neoriginálního kabelu může představovat neznámé nebezpečí. |
| 2 | Kontakt elektrických zařízení s kapalinami může vést k riziku úniku elektrického proudu. |
| 3 | Při nesprávném elektrickém připojení může dojít k úrazu elektrickým proudem. |
| 4 | Po vypnutí napájení ovladače a souvisejícího zařízení a odpojení napájecího kabelu nezapomeňte provést výměnu. Pokud se práce provádí při zapnutém napájení, může to způsobit úraz elektrickým proudem nebo poruchu. |
1.2 Bezpečnostní opatření
Při používání mého robota je třeba dodržovat následující bezpečnostní pravidla:
- mycobiota je elektrické zařízení. Neprofesionální technici nemohou vodič upravovat, jinak je náchylný ke zranění zařízení nebo osoby.
- Značky NEBEZPEČÍ, VAROVÁNÍ v této příručce jsou pouze doplňkem bezpečnostních opatření.
- Používejte mykobiotu ve specifickém rozsahu prostředí. Pokud tomu tak není, překročení specifikací a podmínek zatížení zkrátí životnost produktu a dokonce poškodí zařízení.
- Před provozem a údržbou mycobiota musí být personál odpovědný za instalaci, provoz a údržbu vyškolen, aby porozuměl různým bezpečnostním opatřením a správným metodám provozu a údržby.
- Nepoužívat mykobiotu v reklaměamp prostředí, aby nedošlo k poškození, patří myCobot k přesným elektronickým součástkám.
- Nepoužívejte mykobiotu v prostředí s vysokou teplotou. Vnější povrch mykobioty je vyroben z fotosenzitivní pryskyřice jako suroviny, vysoká teplota poškodí skořápku a povede k jejímu selhání.
- Vysoce korozivní čištění není vhodné pro čištění mykobioty. Eloxované součásti nejsou vhodné pro čištění ponorem.
- Nepoužívejte mého robota bez montážní základny, aby nedošlo k poškození zařízení nebo nehodám. myCobot by měl být používán v pevném a nenápadném prostředí.
- K napájení myCobot nepoužívejte jiné napájecí adaptéry Pokud dojde k poškození v důsledku použití nevyhovujícího adaptéru, nebude zahrnut do poprodejního servisu.
- Prosím, nerozebírejte ani neodšroubovávejte šrouby a jejich plášť. Pokud je otevřen, nelze poskytnout záruční servis.
- Lidé nemohou opravit myCobot bez odborného školení. Pokud se vyskytne problém s mým robotem, kontaktujte prosím včas inženýra technické podpory myCobot.
- Dodržujte prosím příslušné zákony týkající se vyřazených mykobiotů a chraňte životní prostředí.
- NENECHTE děti hrát si s mým robotem samotné. Všechny procesy je třeba sledovat za běhu. Po dokončení procesů prosím okamžitě vypněte zařízení.
- Je zakázáno upravovat nebo odstraňovat jmenovky, pokyny, ikony a značky na robotickém rameni a souvisejícím vybavení.
- Nevypalujte ovladače jiných produktů do terminálu Atom. Pokud se tím zařízení poškodí, nebude zahrnuto do poprodejního servisu.
Nepoužívejte prosím kolaborativního robota Chatbot pro následující účely. - Lékařské a životně důležité aplikace.
- V prostředí, které může způsobit výbuch.
- Používá se přímo bez hodnocení rizik.
- Nedostatečné využití úrovní bezpečnostních funkcí.
- Nedůsledné používání parametrů výkonu robota.
Máte-li jakékoli dotazy k této příručce, navštivte a odešlete zpětnou vazbu na:https://www.elephantrobotics.cn.
1.3 Scénáře použití
O mykobiotě
2.1 Pozadí
V souladu s posláním „Užijte si svět robotů“ společnost Elephant Robotics navrhla a vyvinula mycobiota, nejmenšího a nejlehčího kolaborativního robota na světě, který si zachovává většinu funkcí průmyslových robotů. Díky kompaktnímu a elegantnímu průmyslovému designu, vynikajícímu a silnému výkonu a obrovskému prostoru pro vývoj softwaru a hardwaru má myCobot neomezené možnosti v rozšiřování aplikací.
Designový prototyp mycobiota pochází od robota typu All-in-one, který společnost Elephant Robot uvedla na trh v Číně v roce 2018. Jako první integrovaný kolaborativní robot v Číně získal v roce 2019 ocenění CAIMRS Industrial Robot Innovation Award a v roce 2019 High-tech Robot Annual „Innovation Technology ward“ a byl také prodán do více než 30 zemí doma i v zahraničí, přičemž získal jednomyslnou chválu a uznání od továren 500 nejlepších světových podniků.
2.2 Úvod
mycobiota je nejmenší a nejlehčí šestiosý kolaborativní robot na světě, který společně vyrábí Elephant Robotics a M5Stack. Je to více než nástroj produktivity plný představivosti, může pokračovat v sekundárním vývoji podle požadavků uživatelů k dosažení personalizovaného přizpůsobení.
S hmotností 850 g, užitečným zatížením 250 g a délkou ramen 350 mm je myCobot kompaktní, ale výkonný, lze jej nejen spojit s řadou koncových efektorů, aby se přizpůsobil různým druhům aplikačních scénářů, také podporuje sekundární vývoj multiplatformní software pro splnění potřeb různých scénářů, jako je vědecký výzkum a vzdělávání, chytrá domácnost, lehký průmysl a komerční aplikace.
myCobot – základní parametr
| Stupeň svobody | 6 |
| Užitečné zatížení | 250 g |
| Rozpětí paží | 350 mm |
| Pracovní rádius | 280 mm |
| Opakovatelnost | ±0.5 mm |
| Hmotnost | 850 g |
| Vstup napájení | 8V, 5A |
| Pracovní stav | -5°~45° |
| Sdělení | USB Type-C |
2.3 Vlastnosti
- Jedinečný průmyslový design a extrémně kompaktní
mycobiota je integrovaný modulární design a váží pouze 850 g, což se velmi snadno přenáší. Jeho celková struktura těla je kompaktní s menším počtem náhradních dílů a lze ji rychle rozebrat a vyměnit, aby bylo možné realizovat plug and play. - Vysoká konfigurace a vybavena 2 obrazovkami
myCobot obsahuje 6 vysoce výkonných servomotorů s rychlou odezvou, malou setrvačností a plynulostí
otáčení. Tělo nese 2 displeje podporující knihovnu nalačno pro zobrazení rozšířené aplikace
scéna snadněji a přehledněji. - Lego Connector a tisíce ekologických aplikací M5STACK
Základna a konec mycobioty jsou vybaveny Lego Connectorem, který je vhodný pro vývoj různých miniaturních vestavěných zařízení. Jeho základna je řízena M5STACK Basic a přímo lze použít tisíce aplikačních případů. - Hranaté programování a podpora průmyslových ROS
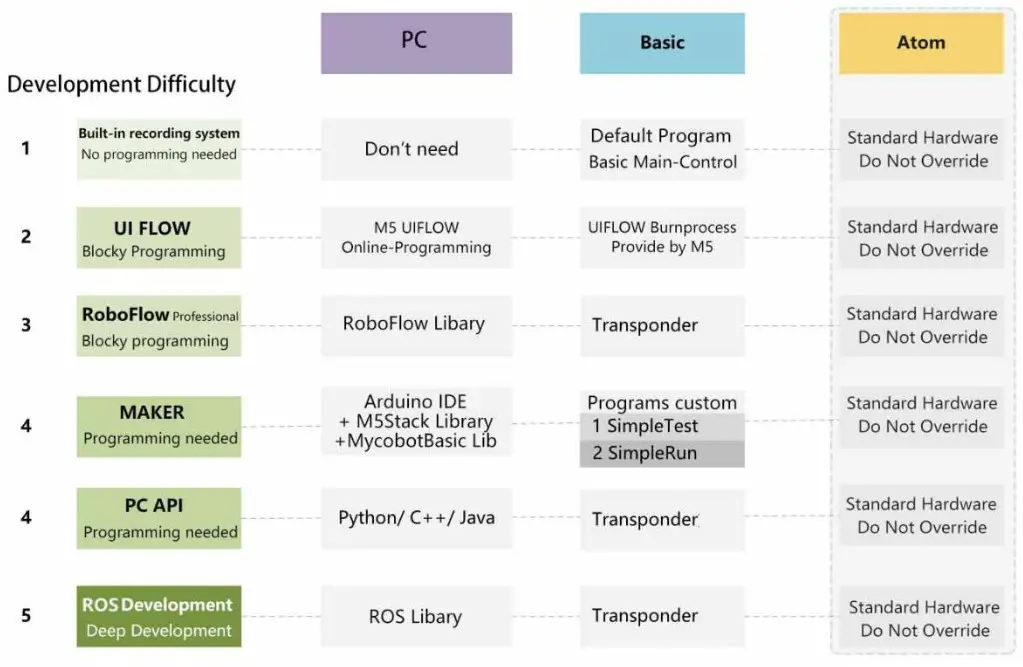
Pomocí vizuálního programovacího softwaru UIFlow je programování mého robota jednoduché a snadné pro každého.
Můžete také použít RoboFlow, software průmyslových robotů od Elephant Robotics, podporující více funkčních modulů Arduino + open-source systém ROS. - Nahrávání a učení se ručně
Zbavte se tradičního režimu ukládání bodů, myCobot podporuje výuku drag trial pro záznam uložené trasy a může uložit až 60 minut různých tras, takže nové hráče je snadné a zábavné se učit.
2.4 patentů
Související patenty o mém robotovi
|
Žádný. |
Certifikát č. | Patentové jméno | Patent č. |
Majitel patentu |
| 1 | č.8194138 | Mechanické spojení ramene a mechanické rameno | ZL 2018 20017484.4 | Robotika slonů |
| 2 | č.8186088 | Spojka mechanického ramene a mechanické rameno | ZL 2017 21700594.2 | Robotika slonů |
| Žádný. | Produkt | Typ patentu | Titul |
Patent č. |
| 1 | Lehká robotická ruka | Patent na vzhled | Kolektivní robotické rameno | 2020030683471.3 |
|
Žádný. |
Název vynálezu |
Číslo přihlášky |
| 1 | Metoda a systém pro udržování, přetahování a výuku polohy robota | ZL 2018 1 1634649.3 |
| 2 | Robotická online metoda detekce kolizí a systém založený na modelu hybnosti | ZL 2019 1 0030748.9 |
| 3 | Způsob identifikace dynamických parametrů robota nezávislý na úhlovém zrychlení kloubu | ZL 2019 1 0773865.4 |
Železářské zboží
3.1 Ovladač a akční člen
3.1.1 Základní hlavní ovladač M5STACK
Základní sada M5STACK, stejně jako jeho jmenovec, je startovací sadou mezi vývojovými sadami řady M5STACK.
Jedná se o modulární, stohovatelné, škálovatelné a přenosné zařízení, které je poháněno jádrem ESP-32, díky čemuž je open source, levné, plně funkční a snadno pro vývojáře zvládne vývoj nových produktů na všech stagvčetně návrhu obvodů, návrhu desek plošných spojů, softwaru, návrhu forem a výroby. Tato základní sada poskytuje přívětivou cenu a plnohodnotné zdroje, což z ní dělá dobrou startovací sadu pro prozkoumávání IoT.
Pokud chcete prozkoumat nejrychlejší způsob prototypování IoT, vývojová deska M5STACK je perfektní řešení. Na rozdíl od jiných je vývojová deska M5STACK vysoce efektivní, pokrytá pouzdrem průmyslové třídy a vývojovou deskou založenou na ESP32. Integruje se s moduly Wi-Fi a Bluetooth a obsahuje dvoujádrové a 16 MB SPI Flash. Společně s 30+ stohovatelnými moduly M5Stack, 40+ rozšiřitelnými jednotkami a různými úrovněmi programovacího jazyka můžete vytvořit a ověřit svůj IoT produkt ve velmi krátkém čase.
Podpůrné vývojové platformy a programovací jazyky: Arduino, Blocky language s UIFlow, Micropython. Bez ohledu na to, jakou úroveň programátorských dovedností máte, M5STACK vás provede každým krokem na cestě k realizaci vašeho nápadu i ke konečné výrobě. Pokud jste někdy hráli s ESP8266, uvědomili byste si, že ESP32 je perfektní upgrade z ESP8266. Pro srovnání, ESP32 má více GPIO, více analogových vstupů, dva analogové výstupy, několik dalších periferií (jako náhradní UART). Oficiální vývojová platforma ESP-IDF byla transplantována s FreeRTOS. S dvoujádrovým operačním systémem a operačním systémem v reálném čase můžete získat lépe organizovaný kód a mnohem vysokorychlostní procesor.
M5STACK Basic se skládá ze dvou oddělitelných částí. Horní část obsahuje všechny druhy procesorů, čipy a některé další součásti slotů. Zásuvka M-BUS a výsuvné kolíky na obou stranách.
3.1.1.1 Vlastnosti produktu
- Na bázi ESP32
- Vestavěný reproduktor, tlačítka, barevný LCD, tlačítko napájení/reset
- Slot pro kartu TF (maximální velikost 16G)
- Magnetické přisávání vzadu
- Výsuvné kolíky a otvory
- Zásuvka a kolíky M-Bus
- Platforma programu: UIFlow, MicroPython, Arduino
3.1.1.2 Parametr
| Zdroje | Parametr |
| ESP32-D0WDQ6 | 240 MHz dvoujádrový, 600 DMIPS, 520 KB SRAM, Wi-Fi, duální Bluetooth |
| Blikat | 16 MB |
| Vstup napájení | 5V @ 500mA |
| Přístav | Typ C x 1, GROVE(I2C+I/0+UART) x 1 |
| Spodní port jádra | PIN (G1, G2, G3, G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| Obrazovka IPS | 2palcový, 320×240 barevný TFT LCD, ILI9342C, jas 853nit |
| Reproduktor | 1W-0928 |
| Tlačítko | Vlastní tlačítko x 3 |
| Anténa | 2.4G 3D anténa |
| Provozní teplota | 32 °F až 104 °F (0 °C až 40 °C) |
| Čistá hmotnost | 47.2 g |
| Hrubá hmotnost | 93 g |
| Velikost produktu | Rozměr 54 x 54 x 18 mm |
| Velikost balení | Rozměr 95 x 65 x 25 mm |
| Materiál pouzdra | Plast (PC) |
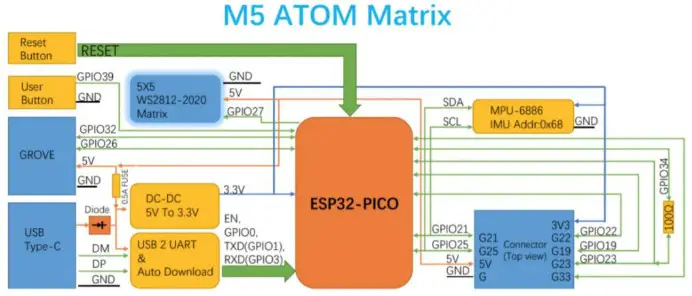
3.1.2 Atom M5STACK
ATOM Matrix, který má velikost pouze 24*24mm, je nejkompaktnější vývojovou deskou ze série vývojových kitů M5Stack. Poskytuje více GPIO pinů a je velmi vhodný pro vývoj šikovných a miniaturních embedded zařízení.
Hlavní ovládání využívá čip ESP32-PICO-D4, který je integrován s technologiemi Wi-Fi a Bluetooth a má 4 MB integrované SPI flash paměti. Deska Atom poskytuje infračervenou LED spolu s 5 * 5 RGB LED maticí na panelu, vestavěným senzorem IMU (MPU6886) a rozhraním HY2.0. Pod maticí RGB LED je k dispozici univerzální programovatelné tlačítko, které uživatelům umožňuje přidat podporu vstupu do jejich různých projektů. Integrované rozhraní USB (Type-C) umožňuje rychlé nahrávání a provádění programu. Na zadní straně je jeden otvor pro šroub M2 pro montáž desky.
Poznámka: Při používání manipulátoru se prosím vyhněte vypalování firmwaru do ATOM na konci manipulátoru. Zařízení podporuje pouze náš původní firmware.
Pochopte prosím nepříjemnosti, které vám byly způsobeny.
3.1.2.1 Vlastnosti
- ESP32 na bázi PICO
- Programovatelné tlačítko
- 5*5 RGB LED maticový panel (WS2812C)
- Vestavěná infračervená LED
- Vestavěný inerciální senzor MPU6886
- Výsuvné kolíky a otvory
- Platforma programu: Arduino UIFlow
3.1.2.2 Specifikace
| Zdroje | Parametr |
| ESP32 | 240 MHz dvoujádrový, 600 DMIPS, 520 KB SRAM, Wi-Fi, duální Bluetooth |
| Blikat | 4 MB |
| Vstup napájení | 5V @ 500mA |
| Přístav | Typ C x 1, GROVE(I2C+I/0+UART) x 1 |
| Rozhraní PIN | G19, G21, G22, G23, G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU 6886 |
| IR | Infračervený přenos |
| Tlačítko | Vlastní dno x 1 |
| Anténa | 2.4G 3D anténa |
| Provozní teplota | 32 °F až 104 °F (0 °C až 40 °C) |
| Čistá hmotnost | 3g |
| Hrubá hmotnost | 14 g |
| Velikost produktu | 24 x 24 x 14 mm |
| Velikost balení | 24 x 24 x 14 mm |
| Materiál pouzdra | Plast (PC) |
3.1.3 Servomotor
myCobot sdílí s advanem 6 vysoce výkonných serv v 6 kloubechtagRychlá odezva, malá setrvačnost, plynulé otáčení, stabilní točivý moment atd.
| Zdroje | Parametr |
| Velikost | 23.2 * 12.1 * 28.5 mm |
| Příkon | 4.8~7.4V |
| Provozní teplota | -15~70° |
| Jmenovitý točivý moment | 1.5 kg.cm@6V |
| Zastavovací moment | 4.5 kg.cm@6V |
| Úhel natočení | 300°(Úhel může být omezen softwarem) |
3.2 Mechanická struktura
3.2.1 Velikost a pracovní rozsah
A) mykobiota
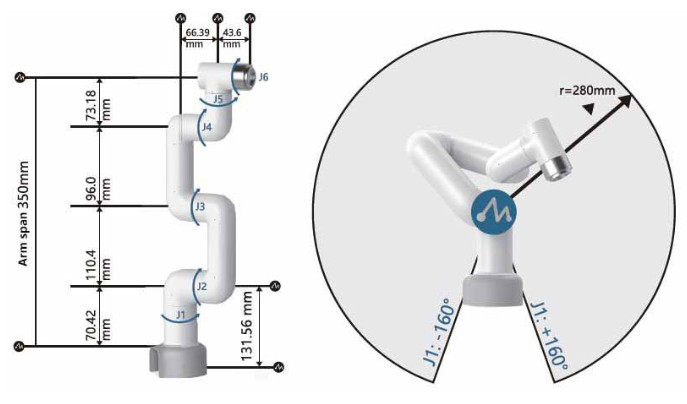
myCobot -Tabulka kloubního rozsahu pohybu
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
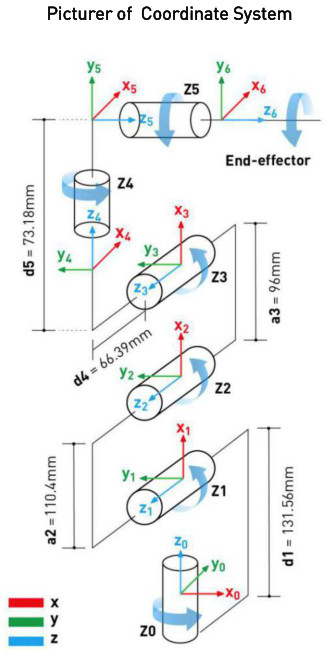
Picturer souřadnicového systému
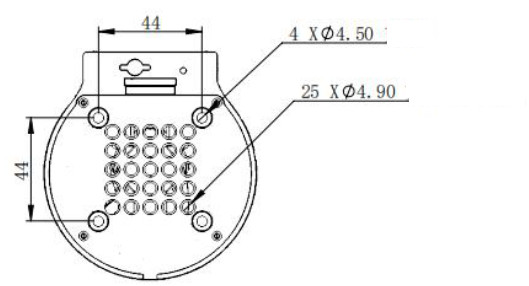
B) Sestavení základny
Základna je kompatibilní jak s otvory pro součástky Lego-tech, tak s průchozími otvory pro šrouby.
C)Ukončit montáž
Konec je kompatibilní jak s otvorem pro součást Lego-tech, tak se závitem šroubu.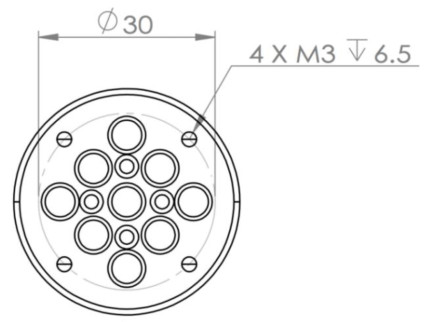
3.2.2 Vybalení a instalace
3.2.2.1 Vybalení
Poznámka: Poté, co je obalová krabice na svém místě, potvrďte, že je obal robota neporušený a nepoškozený. Pokud dojde k poškození, kontaktujte prosím včas logistickou společnost a místního dodavatele. Po rozbalení zkontrolujte skutečné položky v krabici podle seznamu položek.

| myCobot【standardní sada】 | -myCobot-280 -Brožura -Zdroj napájení -USB typ C -Skokan -M4*35, šroub z nerezové oceli - Šestihranný klíč |
Nainstalujte prosím robotický systém v prostředí, které splňuje podmínky popsané v tabulce, abyste mohli využívat a udržovat výkon stroje a používat jej bezpečně.
Provozní prostředí a podmínky
| Teplota | -10℃~45℃ |
| Relativní vlhkost | 20%~70% |
| Vnitřní/venkovní | Krytý |
| Další požadavek na životní prostředí | - Vyhýbejte se slunečnímu záření. - Chraňte před prachem, mastným kouřem, solí, železnými pilinami atd. -Uchovávejte mimo dosah hořlavých a korozivních kapalin a plynů. - Nedotýkejte se vody. - Nepřenáší otřesy, vibrace atd. -Uchovávejte mimo dosah zdrojů silného elektromagnetického rušení. |
3.2.2.2 Instalace
Skutečná hmotnost kolaborativního robota mycobiota je 850g. S ohledem na pohyb robota se bude těžiště při pohybu robota pohybovat. Proto je potřeba robota upevnit na pevnou základnu, aby se dal normálně používat.
Velikost rozhraní základny robota: Otvor pro upevnění podstavce je rozhraní, které připevňuje robota k jiným základnám nebo rovinám. Konkrétní velikost otvoru je zobrazena následovně. Jedná se o 4 průchozí otvory o průměru 4.5 mm, které lze upevnit šrouby M4.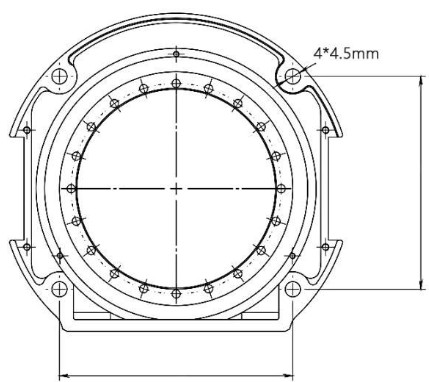
Před instalací se ujistěte, že je na pevné základně odpovídající otvor se závitem. Před oficiální instalací potvrďte:
- Prostředí, které má být instalováno, odpovídá výše uvedeným požadavkům.
- Poloha instalace není menší než pracovní rozsah robota a je zde dostatek místa
pro instalaci, použití, údržbu a opravy. - Umístěte stojan do správné polohy.
- Nástroje související s instalací jsou připraveny, jako jsou šrouby, klíče atd.
Po potvrzení výše uvedeného přesuňte robota na montážní plochu základny, upravte polohu robota a zarovnejte upevňovací otvor základny robota s otvorem na montážní ploše základny.
Poznámka: Při nastavování polohy robota na montážní základně se prosím vyhněte tlačení robota přímo na montážní povrch základny, aby nedošlo k poškrábání. Při ručním přemísťování robota se prosím snažte vyhnout působení vnější síly na slabou část těla robota, abyste zabránili zbytečnému poškození robota.
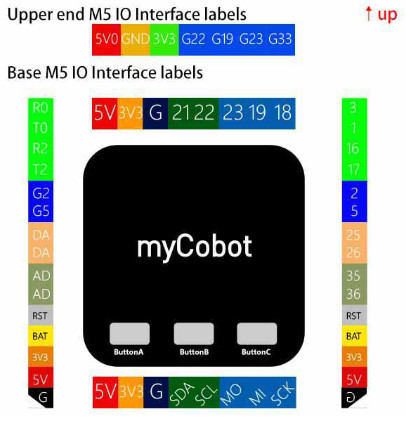
3.3 Elektronika a elektrika
myCobot má tři externí terminály. Jsou to externí svorky M5Stack Basic na základně, dvě svorky Grove v blízkosti napájecí zásuvky a externí svorky spoje M5Stack Atom J6.
a)M5STACK Základní elektrické schéma

b) Schéma obvodu atomu M5STACK
c) Schéma IO rozhraní
Software
Pro aktualizace softwaru se prosím nejprve podívejte na náš Github. https://github.com/elephantrobotics/myCobot
4.1 Upgrade a obnova firmwaru – moje studio
moje studio je komplexní platforma pro roboty mého robota/mykobioty.
Hlavní funkce mého studia jsou: 1) Aktualizace firmwaru; 2) Poskytněte videonávody, jak robota používat; 3) Poskytněte informace o údržbě a opravách (jako jsou videonávody, otázky a odpovědi atd.).
Odkaz na youtube videa o myStudio je: https://youtu.be/Kr9i62ZPf4w
Pokud potřebujete upgradovat nebo udržovat mycobiotu, ujistěte se, že je nastaveno vývojové prostředí. Pokud ne, nainstalujte nejprve ovladač sériového portu a poté zkuste použít software. Odkaz ke stažení je následující:
Oficiální webmísto: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Pokud používáte systém Windows, stáhněte si prosím „my studio-windows.exe“ a rozbalte jej do složky projektu. Dávejte pozor, abyste jej nepoužili se složitými cestami, což může vést k problémům s nerozpoznanými cestami.
Pokud je vaše vývojové prostředí již nastaveno, můžete přímo otevřít file "můjCobot." exe“.
Po otevření je rozhraní následující: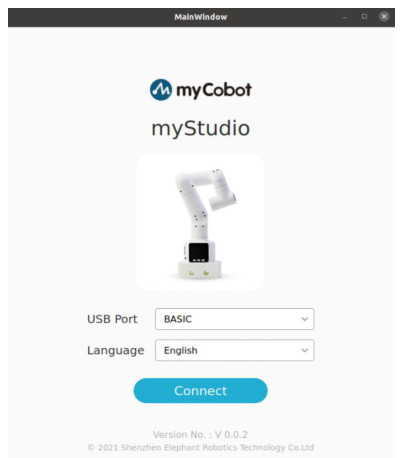
Propojte svůj myCobot s „Basic“ nebo „Atom“, zvolte „jazyk“ a poté klikněte na „Připojit“ pro vstup do hlavního rozhraní, jak je zobrazeno níže: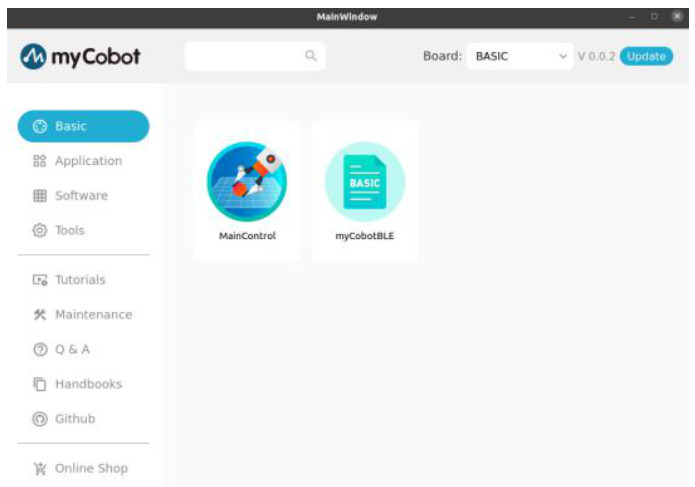
Pokud připojíte Basic i Atom, v panelu Board v pravém horním rohu vyberte software, který chcete znovu vypálit, a poté kliknutím na Basic nebo Tools vyberte firmware, který chcete vypálit.
4.2 Vestavěný záznam trasy
Hlavní ovládací deska M5STACK Basic má 3 tlačítka podporující vlastní programování a zápis dat. Tento program je open source, můžete se podívat na náš GitHub.
Ukázka výuky přetažení
- Nahrávání: Po vstupu do režimu nahrávání vyberte místo pro uložení nahrávky

Tlačítko A: Uložit do Ram
Tlačítko B: Uložit na paměťovou kartu
Tlačítko C: Ukončení režimu záznamu - Spusťte nahrávání

Po výběru místa uložení dokončete cílovou akci ručně přetažením robotické paže, poté se akce zaznamená a uloží. - Hrát

Tlačítko A: Spuštění přehrávání nahrané akce
Tlačítko B: Pauza
Tlačítko C: Ukončení přehrávání
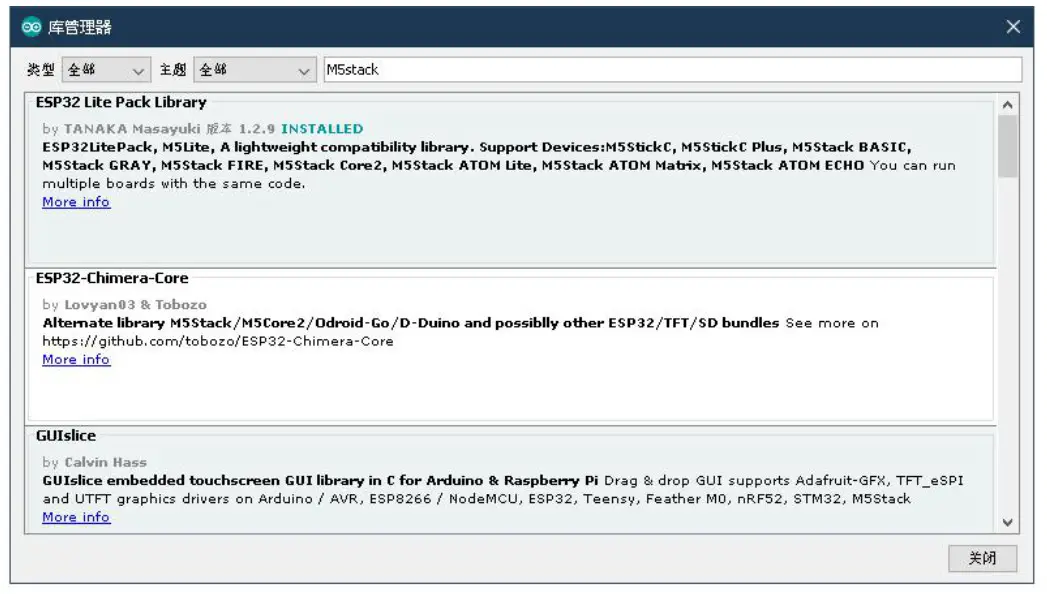
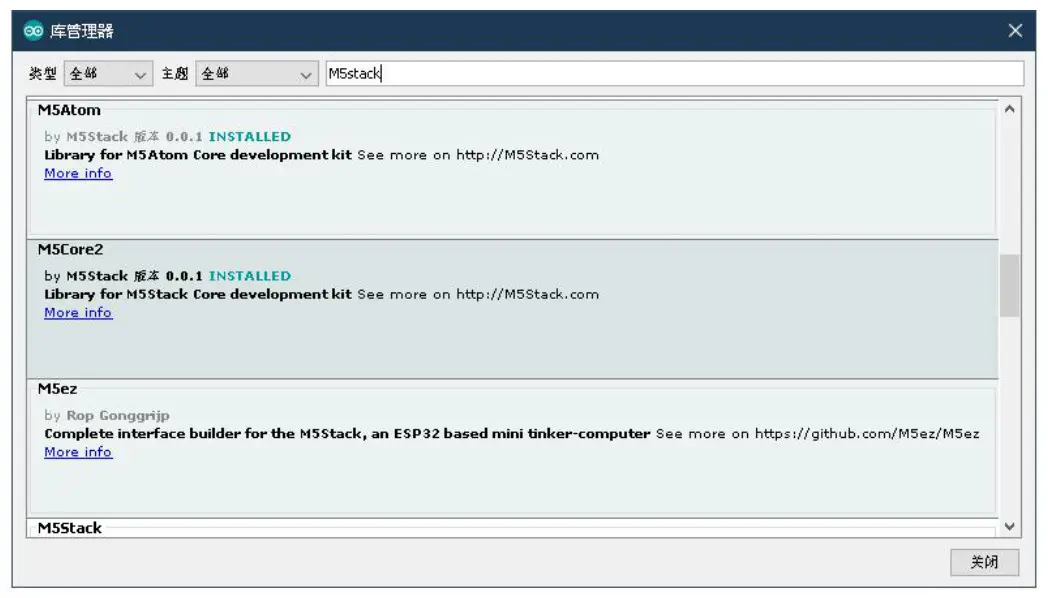
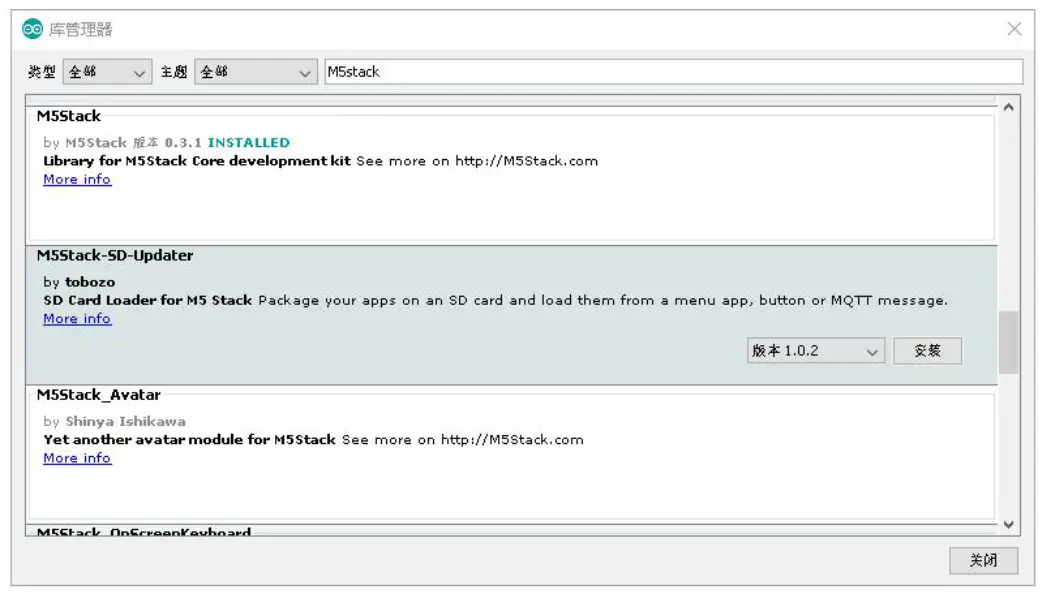
4.3 Knihovny Arduino
Knihovna je sbírka kódů, která vám umožňuje snadno připojit a používat senzory, displeje, moduly atd. Např.ampVestavěná knihovna LiquidCrystal umožňuje snadnou komunikaci se znakovými LCD displeji.
Funkce vývojové desky Arduino lze při použití knihovny rozšířit. Díky knihovně můžeme snadno realizovat spolupráci mezi Arduinem a externím hardwarem nebo datovou komunikací. Arduino IDE je předinstalované s řadou standardních knihoven files. Zároveň můžete také instalovat a importovat knihovny třetích stran (například open-source knihovny stažené z internetu) do Arduino IDE. Můžete dokonce vytvářet knihovny a importovat je do Arduino IDE. Existence knihovny pomáhá uživatelům obejít specializovanější obsah, jako jsou registry a adresní ukazatele, což výrazně snižuje obtížnost vývoje. Pokud potřebujete vědět, jak přidat knihovny třetích stran pro instalaci ARDUINO IDE, podívejte se na adresu a způsob instalace ovladače: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development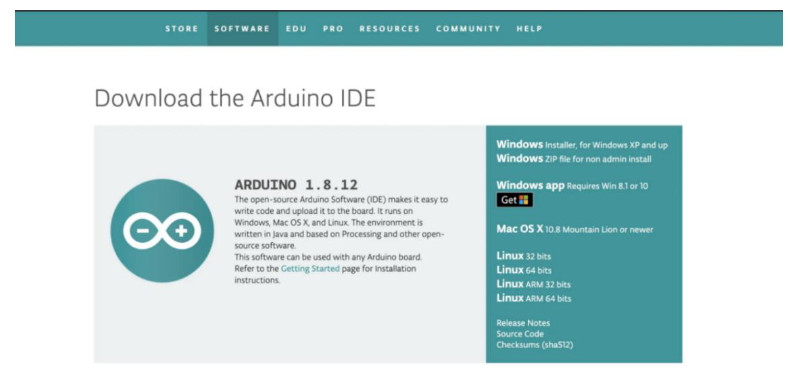 Můžete se také podívat na náš Github pro více informací. https://github.com/elephantrobotics/myCobot
Můžete se také podívat na náš Github pro více informací. https://github.com/elephantrobotics/myCobot
Následovně:
4.4 Rozhraní API a komunikace
- UNIFLOW
- Arduino
- mikro python
- FreeROTS
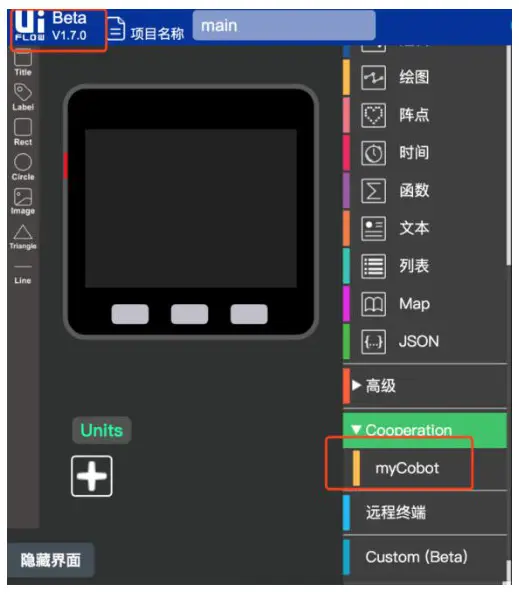
4.4.1 UIFlow
Použijte UIFlow Beta Version a Select Cooperation – mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS je ve vývoji a bude aktualizován podle pokroku.
Od 12.31:
- Aktualizováno nastavení ROS, takže nyní lze nainstalovat Python2 nebo 3.
- Změňte místo toho na ruční zadání sériového portu, aby uživatelé Windows mohli spouštět přímo.
- Aktualizujte nový dokument specifikace rozhraní v knihovně API, vyhledejte „README“.
- 4.6 Kalibrace kloubu
Pokud váš mobot potřebuje kalibrovat klouby, použijte k vypálení kalibrace nejprve firmware mycobiota nebo Arduino a další nástroje.
Po nahrání firmwaru se níže zobrazí základní rozhraní:
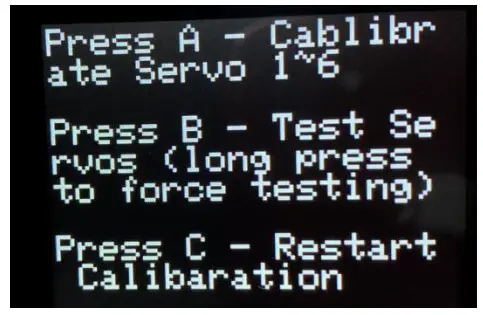
V tomto okamžiku otočte J1 do standardní nulové polohy zarovnané s drážkou a stiskněte tlačítko A (levé tlačítko), poté J1 přejde z dynamického pohybu do statické polohy a bude fixován do této standardní nulové polohy.
Opakujte kroky podle této metody pro nastavení zbývajících J2-J6. Po nastavení J6 stiskněte znovu klávesu A (levou klávesu) pro uložení všech nastavení.
Když jsou všechny klouby zpět do standardní nulové polohy, musíte také zkontrolovat, zda může myCobot normálně fungovat. Stiskněte tlačítko B (prostřední tlačítko), pak můj robot postupně detekuje J1 až J6.
Ujistěte se, že v provozním dosahu nejsou žádné překážky nebo rušení personálu, aby se zabránilo poškození zařízení a personálu během testování.
Vizuální programování a průmyslový software
5.1 Vizuální programovací software-UIFlow
Pro podrobné použití si prosím stáhněte návod k obsluze UI Flow z níže uvedeného odkazu.
M5STACK Basic: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK Atom: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Průmyslový vizualizační programovací software-RoboFlow
myCobot podporuje RoboFlow provozovaný průmyslovými kolaborativními roboty Elephant Robotics. Provozní proces RoboFlow je jednoduchý a snadno použitelný a interaktivní rozhraní je jasné a snadno srozumitelné, což je pro uživatele pohodlné k rychlému zvládnutí a použití a efektivně pomáhá uživatelům efektivně dokončit operace a programovací úlohy. Dokonce i začínající uživatelé mohou také dosáhnout cílových funkcí pomocí jednoduchých operací.
Pro podrobné použití si prosím stáhněte návod k obsluze RoboFlow z níže uvedeného odkazu.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Poprodejní servis
- Služba vrácení je omezena na zboží, které nebylo otevřeno do 7 dnů od data obdržení logistiky produktů. Přepravné nebo jiná rizika vzniklá na oplátku nese zákazník.
- Zákazníci by měli při žádosti o záruku poskytnout nákupní fakturu a záruční list jako potvrzení o záruce.
- Elephant Robotics ponese odpovědnost za hardwarové závady produktů způsobené běžným používáním během záruční doby.
- Záruční doba začíná běžet od data nákupu nebo od data převzetí logistiky.
- Vadné díly z produktů budou majetkem společnosti Elephant Robotics a v případě potřeby budou účtovány příslušné náklady.
Pokud potřebujete požádat o záruční servis, kontaktujte prosím nejprve náš zákaznický servis a potvrďte podrobné informace. Níže jsou uvedeny záruční podmínky podrobných součástí:
Poznámka: V případě rozporu s produktovou brožurou má přednost uživatelská příručka.
a)Severní motor
| Záruční doba | Záruční služby |
| ≤ 1 měsíc | Elephant Robotics nabízí zdarma nový motor na sever a nese náklad. |
| 1-3 měsíce | Elephant Robotics nabízí zdarma nový motor na sever, celní náklady ponesou |
| ≥3 měsíce | Zákazníci si to musí koupit sami. |
b) Elektrické díly (Hardware M5)
| Záruční doba | Záruční služby |
| ≤ 3 měsíce | Zákazníci jej musí po demontáži poslat zpět, Elephant Robotics pošle nový zdarma a unese náklad až domů. |
| 3-6 měsíce | Zákazníci jej musí po demontáži poslat zpět a nést náklad a domů, Elephant Robotics pošle nový zdarma. |
| ≥6 měsíce | Zákazníci si to musí koupit sami. |
c) Díly konstrukce, včetně dílů skořepiny
| Záruční doba | Záruční služby |
| ≤ 1 rok | Elephant Robotics nabízí zdarma nové komponenty jednou, celní náklady ponesou. |
| ≥ 1 roky | Zákazníci si to musí koupit sami. |
V záruční době dodaného výrobku firma zdarma opraví pouze poruchy, které se vyskytnou při běžném používání robota. V následujících případech však budou zákazníkovi účtovány opravy (i v záruční době):
- Poškození nebo porucha způsobená nesprávným použitím a nesprávným použitím, které se liší od návodu.
- Porucha způsobená neoprávněnou demontáží zákazníkem.
- Poškození způsobené nesprávným nastavením nebo neoprávněnými opravami.
- Škody jsou způsobeny přírodními katastrofami, jako jsou zemětřesení a záplavy.
při obsluze robota přísně dodržujte pokyny v této příručce a související příručce.
Otázky a odpovědi:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
Otázka: Kompilátor nemohl najít odpovídající zařízení?
Odpověď: Zařízení lze vyvíjet pouze po nastavení vývojového prostředí a instalaci odpovídající knihovny projektu.
Otázka: Kompilátor nemohl zkompilovat sample program správně najít odpovídající zařízení?
Odpověď: Požadovaná knihovna projektu není nainstalována nebo došlo ke konfliktu s knihovnou projektu. Nejprve zkontrolujte, zda je knihovna projektu správně nainstalována. Pokud je nainstalováno správně, ale stále nelze kompilovat, přeinstalujte vývojové prostředí Arduino.
Otázka: Zařízení po vypálení firmwaru do ATOM nefungovalo správně?
Odpověď: Firmware pro terminál ATOM musí používat náš tovární firmware. Pokud dojde k náhodnému vypálení jakéhokoli jiného firmwaru, můžete zvolit „myCobot ATOM ATOMMAIN pro vypálení terminálu ATOM.
Otázka: Dochází k mírnému kolísání ve svislé poloze, ale ne ve stavu pohybu?
Odpověď: Zkontrolujte, zda je můj robot ve svislém stavu. mykobiota není ve vertikálním stavu ovlivněna gravitací, mechanické vyprázdnění může způsobit drobné kolísání. Ale nebude tam kolísání, když bude mimo vertikální stav. Doporučená rychlost je 400-500 ve vertikálním stavu.
Otázka: Bude systém ROS nabíjet později?
Odpověď: ROS je open source a bude aktualizován na náš Github. Aktualizace firmwaru není zpoplatněna.
Kontaktujte nás
Pokud potřebujete pomoc, kontaktujte nás, jak je uvedeno níže.
Shenzhen Elephant Robotics Technology Co., Ltd
Adresa: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, Čína
E-mail: support@elephantrobotics.com
Telefon: +86(0755)-8696-8565 (pracovní den 9:30-18:30)
Webmísto: www.elephantrobotics.com
Twitter: CobotMy

Dokumenty / zdroje
 |
Elephant Robotics MyCobot šestiosé kolaborativní robotické rameno [pdfUživatelská příručka MyCobot, šestiosé kolaborativní robotické rameno, MyCobot šestiosé kolaborativní robotické rameno, V20210309 |



