![]() د کارن لارښود
د کارن لارښود![]()

د چاپ حق اعلامیه
هیڅ یو واحد یا فرد نشي کولی د دې لارښود کوم مینځپانګه استخراج، تالیف، ژباړه یا بیا تولید کړي (د بیلګې په توګه: تخنیکي اسناد، سافټویر، او نور)، او نه هم په هیڅ ډول (د موادو او خپرونو په شمول) د شینزین ایلیفنټ روبوټیک ټیکنالوژۍ شرکت لیکلي اجازې پرته خپروي. .، Ltd.
سربیره پردې ، پدې لارښود کې ذکر شوي د محصول معلومات او اړوند سرچینې یوازې د حوالې لپاره دي او مینځپانګې پرته له خبرتیا د بدلون تابع دي.
پرته لدې چې په دې لارښود کې په څرګند ډول ویل شوي ، پدې لارښود کې هیڅ شی باید د ځانګړي هدف لپاره د شخصي زیان ، ملکیت ته زیان یا فټنس د هاتی روبوټیک لخوا د تضمین یا تضمین په توګه ونه کارول شي. ټول حقونه خوندي دي!
|
نسخه |
تفصیل |
نوټ |
| وی 2020.12.31 | د مایکوبوټ 【معیاري سیټ】 ، بیس اسمبلۍ ، او پای مجلس عکس اضافه شوی | |
| وی 2021.02.04 | د همغږي سیسټم ، مای سټوډیو سافټویر عکس اضافه شوی |
اوورview
د لارښود په اړه
د MyCobot همکار روبوټ کارولو ته ښه راغلاست او ستاسو د پیرود لپاره مننه.
دا لارښود د MyCobot د مناسب نصب او کارولو لپاره احتیاطي تدابیر بیانوي. مهرباني وکړئ د دې روبوټ سیسټم نصبولو دمخه دا لارښود او نور اړوند لارښود په احتیاط سره ولولئ. د لوستلو وروسته، مهرباني وکړئ دا په خوندي ځای کې وساتئ ترڅو تاسو هر وخت ورته لاسرسی ومومئ. د لارښود توکي لوستل
دا لارښود په نښه شوی دی:
- نصب کونکی
- Debugger.
- د ساتنې کارکوونکي.
 |
هغه څوک چې د MyCobot همکار روبوټ نصب / ډیبګ / ساتي باید د Elephant Robotics کې روزل شوي وي او د پورته کار لپاره اړین میخانیکي او بریښنایی پوهه ولري. |
د کارولو څرنګوالی
دا لارښود باید د لاندې کارونو په ترسره کولو کې وکارول شي:
- د نصبولو کار: روبوټ کاري موقعیت ته واستوئ او د نصب کولو لارښوونو سره سم بیس ته یې تنظیم کړئ.
- ډیبګ کول: د کار حالت ته د روبوټ ډیبګ کول.
- د ساتنې کار: د منظم ساتنې روبوټ سیسټم ترڅو د دې نورمال فعالیت ډاډمن کړي. کله چې روبوټ د چاپیریال اغیزو یا د کارونکي ناسم عملیاتو له امله خراب شي، یا د روبوټ سیسټم یوه ځانګړې برخه د نورمال خدمت ژوند څخه تیریږي، روبوټ باید ترمیم شي.
یادونه:
- دا لارښود د نړیوالو کاروونکو او همدارنګه په هانګ کانګ، مکاو او تایوان کې د کاروونکو لپاره د تطبیق وړ دی.
- دا لارښود په منظم ډول نه تازه کیږي. تازه شوی نیټه د نسخه شمیره ده. کاروونکي کولی شي د رسمي څخه وروستی نسخه ډاونلوډ کړي webپه هر وخت کې د هاتی روبوټ سایټ.
امنیت
دا څپرکی د هغو خلکو لپاره د عمومي خوندیتوب معلومات توضیح کوي چې په روبوټونو کې نصب، ساتنه او ترمیم کار ترسره کوي. مهرباني وکړئ د دې څپرکي مینځپانګې او احتیاطي تدابیر ولولئ او پوه شئ مخکې له دې چې اداره یې کړئ ، نصب کړئ او کارولو څخه یې.
1.1 د خطر پیژندنه
د همکار روبوټ خوندیتوب د مناسب ترتیب او د روبوټ کارولو اساس پراساس دی ، او حتی که د خوندیتوب ټولې لارښوونې مشاهده شي ، د چلونکي لخوا رامینځته شوی ټپي یا زیان لاهم پیښ کیدی شي. له همدې امله، دا خورا مهم دي چې د روبوټ کارونې خوندیتوب خطرونه پوه شي، کوم چې د ستونزو د رامنځته کیدو دمخه د مخنیوي لپاره ګټور دي.
لاندې جدول 1-2 ~ 4 عام خوندیتوب خطرونه دي چې ممکن د روبوټ کارولو په شرایطو کې شتون ولري:
جدول 1- 2 خطرناک خوندیتوب خطرونه
 |
|
| 1 | شخصي ټپ یا د روبوټ زیان د روبوټ اداره کولو پرمهال د غلط عملیاتو له امله رامینځته شوی. |
| 2 | شخصي ټپي یا د روبوټ زیان رامینځته کیږي ځکه چې روبوټ د اړتیا سره سم نه دی ټاکل شوی، د مثال لپارهample، سکرو پیچلی یا ټینګ شوی نه دی، او بیس د تیز رفتار حرکت لپاره د روبوټ ملاتړ کولو لپاره کافي نه دی، چې د روبوټ د ښکته کیدو لامل کیږي. |
| 3 | د روبوټ د مناسب خوندیتوب فعالیت تنظیم کولو کې پاتې راتلل ، یا د خوندیتوب محافظت وسیلې نصب کول ، او داسې نور ممکن د روبوټ خوندیتوب فعالیت ناکامیدو لامل شي. |
جدول 1- 3 د خبرتیا کچه امنیتي خطرونه
 |
|
| 1 | د روبوټ سره شاوخوا لوبې وکړئ، تاسو ممکن د چلونکي روبوټ لخوا وویشتل شئ، یا د یو خنډ لخوا ځړول شئ لکه کیبل چې د شخصي ټپي کیدو سبب کیږي. |
| 2 | غیر مجاز پرسونل د امنیت تنظیم کولو پیرامیټونه بدلوي، چې د خوندیتوب فعالیت د ناکامۍ یا خطر لامل کیږي. |
| 3 | سکریچونه او پنکچرونه د تیزو سطحو له امله رامینځته کیږي لکه د کار چاپیریال کې د نورو وسیلو یا د روبوټ پای تاثیر کونکي. |
| 4 | روبوټ یو دقیق ماشین دی او پیډل کول ممکن روبوټ ته زیان ورسوي. |
|
5 |
که د clamp په ځای کې نه وي یا مخکې له دې چې د روبوټ بریښنا بند شي یا د ګاز سرچینه بنده شي (دا معلومه نده چې ایا پای تاثیر کونکي د بریښنا له لاسه ورکولو له امله له سقوط پرته څیز په کلکه ساتي). که د clamped څیز نه لرې کیږي، دا کیدای شي د خطر لامل شي، لکه خلک چې د ټکر له امله ټپي کیږي. |
| 6 | د روبوټ د ناڅاپي حرکت خطر شتون لري. په هیڅ حالت کې تاسو باید د روبوټ د کوم محور لاندې ودریږئ! |
| 7 | روبوټ یو دقیق ماشین دی. که دا د سمبالولو په وخت کې په سمه توګه ونه ساتل شي، دا کیدای شي د کمپن لامل شي او کیدای شي د روبوټ داخلي برخو ته زیان ورسوي. |
جدول 1- 4 د خوندیتوب احتمالي خطرونه چې ممکن د بریښنا شاک پایله ولري
 |
|
| 1 | د غیر اصلي کیبل کارول ممکن یو نامعلوم خطر رامینځته کړي. |
| 2 | د بریښنایی تجهیزاتو لخوا د مایعاتو سره اړیکه ممکن د بریښنا لیک خطر رامینځته کړي. |
| 3 | ممکن د بریښنایی شاک خطر شتون ولري کله چې بریښنایی اړیکه غلطه وي. |
| 4 | ډاډ ترلاسه کړئ چې کنټرولر او اړونده تجهیزاتو ته د بریښنا بندولو او د بریښنا تار غیر فعال کولو وروسته د بدیل کار اداره کړئ. که چیرې کار د بریښنا په جریان کې ترسره شي ، نو دا ممکن د بریښنا شاک یا خرابوالي لامل شي. |
1.2 د خوندیتوب احتیاطونه
کله چې زما روبوټ کاروئ نو لاندې امنیتي قواعد باید تعقیب شي:
- مایکوبیوټا بریښنایی تجهیزات دي. غیر مسلکي تخنیکین نشي کولی تار بدل کړي، که نه، دا د وسیلې یا شخص د ټپي کیدو خطر لري.
- په دې لارښود کې د خطر، د خبرتیا نښې یوازې د امنیتي احتیاطونو بشپړونکي دي.
- مهرباني وکړئ مایکوبیوټا په ځانګړي چاپیریال کې وکاروئ. که نه، د مشخصاتو او بار کولو شرایطو څخه تجاوز به د محصول خدمت ژوند لنډ کړي حتی تجهیزاتو ته زیان ورسوي.
- د مایکوبیوټا د چلولو او ساتلو دمخه، د نصب، عملیاتو، او ساتنې مسؤل پرسونل باید د مختلفو امنیتي احتیاطونو او د عملیاتو او ساتنې سمې طریقې درک کولو لپاره وروزل شي.
- په اعلان کې مایکوبیوټا مه کاروئamp د زیان څخه مخنیوي لپاره د اوږدې مودې لپاره چاپیریال ، myCobot د دقیق بریښنایی برخو پورې اړه لري.
- د لوړ تودوخې چاپیریال کې مایکوبیوټا مه کاروئ. د مایکوبیوټا بهرنۍ سطحه د فوټو حساس رال څخه د خامو موادو په توګه جوړه شوې ده، لوړه تودوخه به شیل ته زیان ورسوي او د ناکامۍ لامل شي.
- په لوړه کچه د ککړتیا پاکول د مایکوبیوټا پاکولو لپاره مناسب ندي. انوډیز شوي اجزا د ډوبیدو پاکولو لپاره مناسب ندي.
- زما روبوټ د نصب کولو بیس پرته مه کاروئ ترڅو تجهیزاتو یا پیښو ته زیان ونه رسوي. myCobot باید په ثابت او غیر متزلزل چاپیریال کې وکارول شي.
- MyCobot ته د بریښنا رسولو لپاره نور د بریښنا اډیپټرونه مه کاروئ که چیرې دا د غیر موافقت کونکي اډاپټر کارولو له امله زیانمن شي، دا به د پلور وروسته خدمت کې شامل نه وي.
- مهرباني وکړئ پیچونه او د دوی خولۍ جلا یا جلا مه کوئ. که دا پرانیستل شي، هیڅ تضمین خدمت نشي چمتو کیدی.
- خلک نشي کولی د مسلکي روزنې پرته MyCobot ترمیم کړي. که زما د روبوټ سره کومه ستونزه شتون ولري، مهرباني وکړئ په وخت کې د myCobot تخنیکي ملاتړ انجنیر سره اړیکه ونیسئ.
- مهرباني وکړئ د سکریپ شوي مایکوبیوټا سره معامله کولو لپاره د اړوندو قوانینو سره سم عمل وکړئ ، او د چاپیریال ساتنه وکړئ.
- ماشومانو ته اجازه مه ورکوئ چې یوازې زما روبوټ سره لوبې وکړي. ټولې پروسې باید د چلولو پرمهال وڅارل شي. د پروسې پای ته رسیدو وروسته، مهرباني وکړئ سمدستي تجهیزات بند کړئ.
- د روبوټیک بازو او اړوندو تجهیزاتو د نوم پلیټونو، لارښوونو، شبیهونو او نښو بدلول یا لرې کول منع دي.
- د ټرمینل اتوم ته نور محصول چلوونکي مه سوځوئ. که وسیله د دې له امله خرابه شوې وي، دا به د پلور وروسته خدمت کې شامل نه وي.
مهرباني وکړئ د لاندې موخو لپاره د Chatbot همکار روبوټ مه کاروئ. - طبي او د ژوند مهم غوښتنلیکونه.
- په داسې چاپیریال کې چې کیدای شي د چاودنې لامل شي.
- د خطر ارزونې پرته مستقیم کارول کیږي.
- د خوندیتوب فعالیت کچې کافي کارول.
- د روبوټ فعالیت پیرامیټونو غیر منظم کارول.
که تاسو د دې لارښود په اړه کومه پوښتنه لرئ مهرباني وکړئ لیدنه وکړئ او خپل نظر په دې اړه واستوئ:https://www.elephantrobotics.cn.
1.3 د کارونې سناریوګانې
د مایکبیوټا په اړه
2.1 پس منظر
د "د روباټونو نړۍ څخه خوند واخلئ" ماموریت ته دوام ورکولو سره، د هاتی روبوټکس مایکوبیوټا ډیزاین او وده کړې، د نړۍ ترټولو کوچنی او سپک همکار روبوټ، د صنعتي روبوټونو ډیری دندې ساتي. د کمپیکٹ او په زړه پورې صنعتي ډیزاین، غوره او ځواکمن فعالیت، او د لوی سافټویر او هارډویر پراختیا ځای سره، MyCobot د غوښتنلیک پراخولو کې لامحدود امکانات لري.
د مایکوبیوټا ډیزاین پروټوټایپ په 2018 کې په چین کې د Elephant Robot لخوا په لاره اچول شوي ټول په یوه کې روبوټ څخه دی. په چین کې د لومړي مربوط همکار روبوټ په توګه ، دې د 2019 CAIMRS صنعتي روبوټ نوښت جایزه او د 2019 عالي تخنیکي روبوټ کلنۍ "نوښت" ګټلې. د ټیکنالوژۍ وارډ"، او په کور دننه او بهر له 30 څخه زیاتو هیوادونو ته پلورل شوي، د نړۍ د 500 غوره تصدیو د فابریکو څخه د متفقه ستاینې او پیژندنې ترلاسه کول.
2.2 پیژندنه
mycobiota د نړۍ ترټولو کوچنی او سپک شپږ محور همکار روبوټ دی چې د Elephant Robotics او M5Stack لخوا په ګډه تولید شوی. دا د تخیل څخه ډک د تولیدي وسیلې څخه ډیر دی ، کولی شي د شخصي دودیز کولو ترلاسه کولو لپاره د کاروونکو غوښتنو سره سم ثانوي پرمختګ پرمخ بوځي.
د 850g وزن سره، د 250g د پایلوډ، او د 350mm د وسلو اوږدوالی سره، MyCobot کمپیکٹ مګر پیاوړی دی، نه یوازې د مختلف پای اغیزو سره سمون لري ترڅو د غوښتنلیک مختلف سناریوګانو سره سمون ولري د ثانوي پراختیا ملاتړ هم کوي. ملټي پلیټ فارم سافټویر د مختلف سناریو اړتیاو پوره کولو لپاره لکه ساینسي څیړنې او تعلیم ، سمارټ کور ، سپک صنعت ، او سوداګریز غوښتنلیکونه.
myCobot - بنسټیز پیرامیټر
| د آزادۍ درجه | 6 |
| پېلوډ | 250 ګرامه |
| د بازو موده | 350mm |
| کاري وړانګې | 280mm |
| د تکرار وړتیا | ±0.5mm |
| وزن | 850 ګرامه |
| د بریښنا انډول | 8V,5A |
| کاري حالت | -5°~45° |
| اړیکه | د USB ډول-C |
2.3 ځانګړتیاوې
- بې ساري صنعتي ډیزاین او خورا تړون
mycobiota یو مدغم ماډلر ډیزاین دی او یوازې 850g وزن لري چې لیږدول یې خورا اسانه دي. د دې ټول بدن جوړښت د لږو پرزو سره کمپیکٹ دی او په چټکۍ سره جلا کیدی شي او د پلګ او لوبې احساس کولو لپاره ځای په ځای کیدی شي. - لوړ ترتیب او د 2 سکرینونو سره مجهز
myCobot د 6 لوړ فعالیت سروو موټورونه لري چې د ګړندي غبرګون ، کوچني انارشیا ، او اسانه سره
گردش بدن 2 ډسپلین سکرینونه لري چې د ګړندي کتابتون ملاتړ کوي ترڅو پراخه شوي غوښتنلیک وښیې
صحنه په اسانۍ او روښانه توګه. - د لیګو نښلونکی او زرګونه M5STACK ایکولوژیکي غوښتنلیک
د مایکوبیوټا اساس او پای د لیګو نښلونکي سره مجهز دي ، کوم چې د مختلف کوچني سرایت شوي تجهیزاتو پراختیا لپاره مناسب دی. د دې اساس د M5STACK اساس لخوا کنټرول کیږي، او د زرګونو غوښتنلیک قضیې مستقیم کارول کیدی شي. - بلاکی برنامه کول او د صنعتي ROS ملاتړ کول
د UIFlow بصری پروګرام کولو سافټویر په کارولو سره، زما د روبوټ پروګرام کول د هرچا لپاره ساده او اسانه دي.
تاسو کولی شئ روبو فلو هم وکاروئ ، د Elephant Robotics څخه د صنعتي روبوټونو سافټویر ، د ډیری فعال ماډلونو Arduino + ROS خلاص سرچینې سیسټم ملاتړ کوي. - د لاس په واسطه د تعقیب ریکارډ او زده کړه
د دودیز ټکي خوندي کولو حالت څخه ځان خلاص کړئ ، MyCobot د خوندي شوي ټریک ثبتولو لپاره د ډریګ آزموینې ښوونې ملاتړ کوي او کولی شي تر 60 دقیقو پورې مختلف ټریکونه خوندي کړي چې د نوي لوبغاړو زده کول اسانه او ساتیري کوي.
پیټونه
زما د روبوټ په اړه اړوند پیټینټونه
|
نه. |
د سند شمیره | د پیټینټ نوم | د پیټینټ شمیره. |
پیټینټ |
| 1 | نمبر 8194138 | د میخانیکي بازو اړیکه او میخانیکي بازو | ZL 2018 20017484.4 | د هاتی روبوټیک |
| 2 | نمبر 8186088 | د میخانیکي بازو ګډ نښلونکی او میخانیکي بازو | ZL 2017 21700594.2 | د هاتی روبوټیک |
| نه. | محصول | د ډول ډول ډول | عنوان |
د پیټینټ شمیره. |
| 1 | د سپک وزن روبوټیک بازو | ظاهري پیټینټ | ډله ایز روبوټ بازو | 2020030683471.3 |
|
نه. |
د اختراع سرلیک |
د غوښتنلیک شمیره |
| 1 | د روبوټ پوست ساتلو، ډریګ کولو او تدریس لپاره طریقه او سیسټم | ZL 2018 1 1634649.3 |
| 2 | د روبوټ آنلاین ټکر کشف میتود او سیسټم د حرکت ماډل پراساس | ZL 2019 1 0030748.9 |
| 3 | د یو ډول روبوټ متحرک پیرامیټر پیژندنې میتود د ګډ زاویه سرعت څخه خپلواک دی | ZL 2019 1 0773865.4 |
هارډویر
3.1 کنټرولر او عمل کوونکی
3.1.1 M5STACK بنسټیز اصلي کنټرولر
د M5STACK بنسټیز کټ، د دې نوم په څیر ، د M5STACK پراختیایی کټ لړۍ کې د سټارټر کټ دی.
دا یو ماډلر، د سټیک کولو وړ، د توزیع وړ، او د پورټ ایبل وسیله ده چې د ESP-32 کور سره ځواک لري، کوم چې دا د خلاصې سرچینې، ټیټ لګښت، بشپړ فعالیت، او پراختیا کونکو لپاره اسانه کوي چې په ټولو برخو کې د نوي محصول پراختیا اداره کړي.tages په شمول د سرکټ ډیزاین، د PCB ډیزاین، سافټویر، مولډ ډیزاین، او تولید. دا بنسټیز کټ یو دوستانه نرخ او بشپړ ب featuresې سرچینې چمتو کوي کوم چې دا ستاسو لپاره د IoT سپړلو لپاره یو ښه سټارټر کټ جوړوي.
که تاسو غواړئ د IoT پروټوټایپینګ ترټولو ګړندۍ لاره وپلټئ ، د M5STACK پرمختیا بورډ مناسب حل دی. د نورو په څیر نه، د M5STACK پراختیایی بورډ خورا اغیزمن دی، د صنعتي درجې قضیه او د ESP32 پر بنسټ پراختیایی بورډ پوښل شوی. دا د Wi-Fi او بلوتوټ ماډلونو سره مدغم کیږي او دوه ګونی کور او 16MB SPI فلش لري. د 30+ M5Stack سټیک ایبل ماډلونو سره یوځای، 40+ پراخیدونکي واحدونه، او د پروګرام ژبې مختلف کچو سره، تاسو کولی شئ خپل IoT محصول په ډیر لنډ وخت کې جوړ او تصدیق کړئ.
ملاتړي پراختیایی پلیټ فارمونه او د برنامه کولو ژبې: Arduino ، د UIFlow سره بلاکي ژبه ، مایکروپیتون. پرته لدې چې تاسو د برنامې مهارت کومه کچه لرئ ، M5STACK به تاسو ته د لارې په هر ګام کې لارښود کړي ترڅو ستاسو نظر درک کړي او همدارنګه وروستي محصول ته. که تاسو کله هم د ESP8266 سره لوبه کړې وي، نو تاسو به پوه شئ چې ESP32 د ESP8266 څخه یو بشپړ اپ گریڈ دی. په پرتله، ESP32 ډیر GPIOs لري، ډیر انلاګ ان پټونه، دوه انلاګ محصولات، ډیری اضافي پیری فیرلز (لکه یو اضافي UART). رسمي پراختیایی پلیټ فارم ESP-IDF د FreeRTOS سره لیږدول شوی. د ډبل کور او ریښتیني وخت OS سره ، تاسو کولی شئ ډیر منظم کوډ او ډیر لوړ سرعت پروسیسر ترلاسه کړئ.
M5STACK اساسی د دوه جلا کیدونکو برخو څخه جوړ دی. پورته برخه هر ډول پروسیسرونه، چپس او ځینې نور سلاټ برخې لري. M-BUS ساکټ، او په دواړو خواوو کې د توزیع وړ پنونه.
3.1.1.1 د محصول ځانګړتیاوې
- د ESP32 پر بنسټ
- جوړ شوی سپیکر، تڼۍ، رنګ LCD، د بریښنا/ری سیٹ تڼۍ
- د TF کارت سلاټ (16G اعظمي اندازه)
- په شا کې مقناطیسي سکشن
- د توزیع وړ پنونه او سوراخ
- د M-بس ساکټ او پنس
- د پروګرام پلیټ فارم: UIFlow، MicroPython، Arduino
3.1.1.2 پیرامیټر
| سرچینې | پیرامیټر |
| ESP32-D0WDQ6 | 240MHz ډبل کور، 600 DMIPS، 520KB SRAM، Wi-Fi، دوه ګونی حالت بلوتوټ |
| فلش | 16MB |
| د بریښنا انډول | 5V @ 500mA |
| پورټ | TypeC x 1، GROVE(I2C+I/0+UART) x 1 |
| کور لاندې پورټ | پن (G1,G2,G3,G16,G17,G18,G19,G21,G22,G23,G25,G26,G35,G36) |
| د IPS سکرین | 2 انچه، 320 × 240 رنګین TFT LCD، ILI9342C، روښانتیا 853nit |
| سپیکر | 1W-0928 |
| تڼۍ | دودیز تڼۍ x 3 |
| انتن | 2.4G 3D انتن |
| د عملیاتي حرارت درجه | له 32°F څخه تر 104°F (0°C څخه تر 40°C) |
| خالص وزن | 47.2 ګرامه |
| ناخالص وزن | 93 ګرامه |
| د محصول اندازه | 54 x 54 x 18mm |
| د بسته اندازه | 95 x 65 x 25mm |
| د قضیې مواد | پلاستيک (PC) |
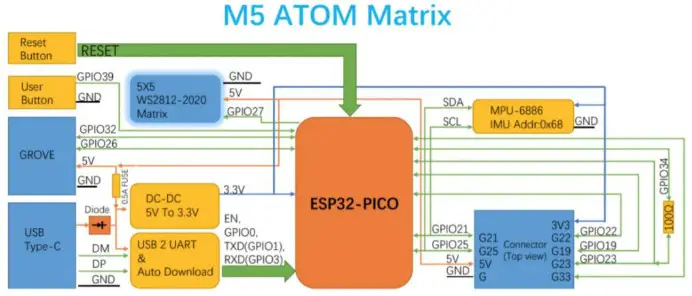
3.1.2 M5STACK اتوم
د ATOM میټریکس، چې یوازې 24 * 24mm اندازه لري، د M5Stack پرمختیا کټ لړۍ کې ترټولو کمپیکٹ پرمختیا بورډ دی. دا ډیر GPIO پنونه چمتو کوي او د لاسي او کوچني سرایت شوي وسیلې پراختیا لپاره خورا مناسب دی.
اصلي کنټرول د ESP32-PICO-D4 چپ غوره کوي، کوم چې د Wi-Fi او بلوتوټ ټیکنالوژیو سره مدغم شوی او د 4MB مدغم SPI فلش حافظه لري. اتوم بورډ په پینل کې د 5 * 5 RGB LED میټریکس سره یو انفرا-ریډ LED چمتو کوي، یو جوړ شوی IMU سینسر (MPU6886)، او د HY2.0 انٹرفیس. د عمومي هدف برنامه کولو وړ تڼۍ د RGB Led میټریکس لاندې چمتو شوې ترڅو کاروونکو ته وړتیا ورکړي چې د دوی مختلف پروژو کې د ان پټ ملاتړ اضافه کړي. آن بورډ USB انٹرفیس (Type-C) د برنامه ګړندي اپلوډ کولو او اجرا کولو وړ کوي. یو M2 سکرو سوری د تختې نصبولو لپاره په شا کې چمتو شوی.
یادونه: کله چې مینیپلیټر وکاروئ ، مهرباني وکړئ د مینیپلیټر په پای کې ATOM ته د فرم ویئر سوځولو څخه مخنیوی وکړئ. وسیله یوازې زموږ اصلي فرم ویئر ملاتړ کوي.
مهرباني وکړئ په مهربانۍ سره د هغه تکلیف په اړه پوه شئ چې تاسو ته راوړل شوي.
3.1.2.1 ځانګړتیاوې
- ESP32 PICO پر بنسټ
- د پروګرام وړ ت .ۍ
- 5*5 RGB LED میټریکس پینل (WS2812C)
- جوړ شوی انفرا ریډ LED
- د MPU6886 داخلي سینسر جوړ شوی
- د توزیع وړ پنونه او سوراخ
- د پروګرام پلیټ فارم: Arduino UIFlow
3.1.2.2 مشخصات
| سرچینې | پیرامیټر |
| ایسپیکس اینمکس | 240MHz ډبل کور، 600 DMIPS، 520KB SRAM، Wi-Fi، دوه ګونی حالت بلوتوټ |
| فلش | 4MB |
| د بریښنا انډول | 5V @ 500mA |
| پورټ | TypeC x 1، GROVE(I2C+I/0+UART) x 1 |
| د PIN انٹرفیس | G19, G21, G22, G23, G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | انفراریډ لیږد |
| تڼۍ | ګمرک لاندې x 1 |
| انتن | 2.4G 3D انتن |
| د عملیاتي حرارت درجه | له 32°F څخه تر 104°F (0°C څخه تر 40°C) |
| خالص وزن | 3g |
| ناخالص وزن | 14 ګرامه |
| د محصول اندازه | 24 x 24 x 14 mm |
| د بسته اندازه | 24 x 24 x 14 mm |
| د قضیې مواد | پلاستيک (PC) |
3.1.3 سروو موټور
myCobot د اډوان سره په 6 جوائنټونو کې د 6 لوړ فعالیت سرووس شریکويtagد ګړندي غبرګون es ، کوچنۍ جړتیا ، اسانه گردش ، مستحکم تورک ، او داسې نور.
| سرچینې | پیرامیټر |
| اندازه | 23.2*12.1*28.5mm |
| د بریښنا آخذه | 4.8~7.4V |
| د عملیاتي حرارت درجه | -15~70° |
| درجه بندي تورک | 1.5kg.cm@6V |
| سټورک | 4.5kg.cm@6V |
| د گردش زاویه | 300 ° (زاویه د سافټویر لخوا محدود کیدی شي) |
3.2 میخانیکي جوړښت
3.2.1 اندازه او کاري سلسله
الف) مایکوبیوټا
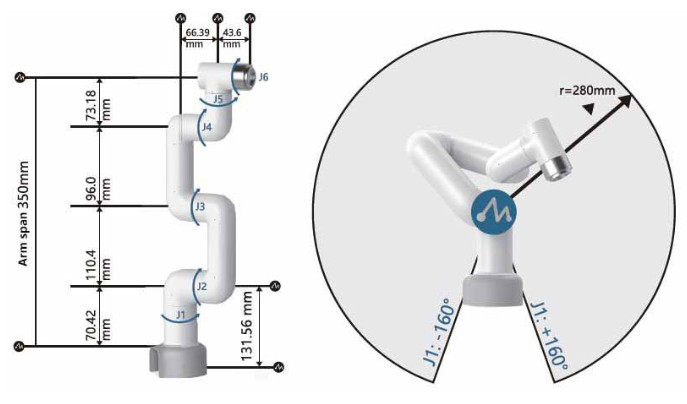
myCobot - د ګډ حرکت جدول
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
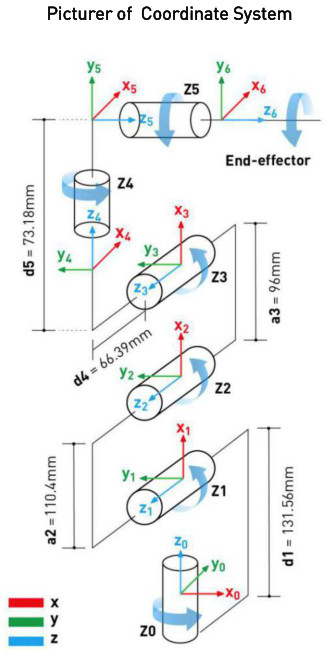
د همغږۍ سیسټم انځورګر
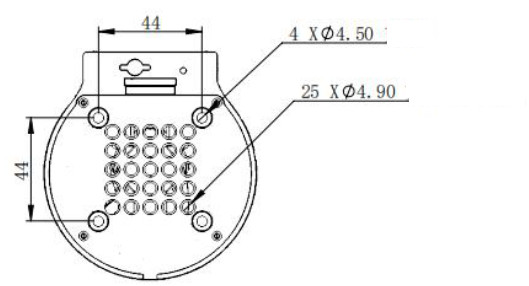
ب) اساسی مجلس
بیس د لیګو ټیک اجزاو سوري او د سوري سکرو سوراخونو سره مطابقت لري.
ج) پای مجلس
پای د لیګو ټیک اجزا سوراخ او د سکرو تار دواړو سره مطابقت لري.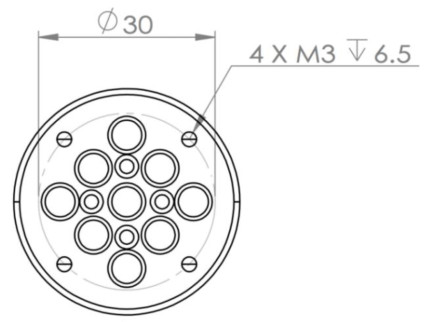
3.2.2 پیک کول او نصب کول
3.2.2.1 پیک کول
یادونه: وروسته له دې چې د بسته بندۍ بکس ځای په ځای شي، مهرباني وکړئ تایید کړئ چې د روبوټ بسته بندي سمه او بې زیانه ده. که کوم زیان شتون ولري، مهرباني وکړئ د لوژستیک شرکت او ځایی عرضه کوونکي سره په وخت اړیکه ونیسئ. د پیک کولو وروسته، مهرباني وکړئ د توکو لیست سره سم په بکس کې اصلي توکي وګورئ.

| myCobot【معياري سيټ】 | -myCobot-280 - بروشر -برښنا ترتیبونکی -USB ډول C - جمپر -M4*35، د سټینلیس سټیل سکرو - هکساګون رنچ |
مهرباني وکړئ د روبوټ سیسټم په داسې چاپیریال کې نصب کړئ چې په جدول کې بیان شوي شرایط پوره کوي ترڅو د ماشین فعالیت پلي او وساتي او په خوندي ډول یې وکاروئ.
عملیاتي چاپیریال او شرایط
| د حرارت درجه | -10 ℃ ~ 45 ℃ |
| نسبي رطوبت | 20%~70% |
| دننه / بهر | دننه |
| بل د چاپیریال اړتیا | - د لمر له وړانګو ډډه وکړئ. – له دوړو، غوړو لوګي، مالګې، اوسپنې له لوګي او داسې نورو څخه ځان وساتئ. - د اور اخیستو وړ مایعاتو او ګازونو څخه ځان وساتئ. - د اوبو سره تماس مه کوئ. - شاک، وایبریشن او داسې نور نه لیږدوي. - د قوي برقی مقناطیسي مداخلې سرچینې څخه لرې وساتئ. |
3.2.2.2 نصب کول
د مایکوبیوټا همکار روبوټ ریښتینی وزن 850g دی. د روبوټ حرکت په پام کې نیولو سره، د جاذبې مرکز به حرکت وکړي لکه څنګه چې روبوټ حرکت کوي. نو ځکه، روبوټ ته اړتیا ده چې په یو قوي بنسټ کې نصب شي ترڅو په نورمال ډول وکارول شي.
د روبوټ بیس د انٹرفیس اندازه: د پیډسټل فکس کولو سوراخ هغه انٹرفیس دی چې روبوټ نورو اډو یا الوتکو ته تنظیموي. د ځانګړي سوراخ اندازه په لاندې ډول ښودل شوې. دا د 4 سوري له لارې د 4.5mm قطر سره دی، کوم چې د M4 بولټونو سره ټاکل کیدی شي.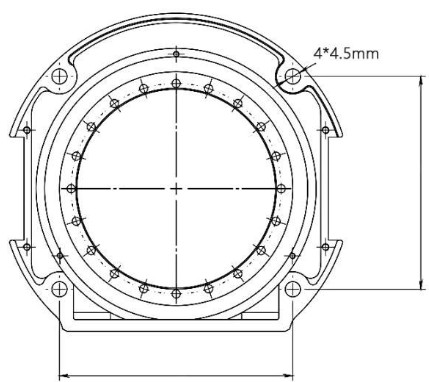
ډاډ ترلاسه کړئ چې د نصب کولو دمخه په ثابت بیس کې ورته تار شوی سوری شتون لري. مخکې له دې چې تاسو په رسمي توګه نصب کړئ، مهرباني وکړئ تایید کړئ:
- د نصب کولو چاپیریال د پورته اړتیاو سره مطابقت لري.
- د نصب کولو موقعیت د روبوټ کاري حد څخه کم نه دی، او کافي ځای شتون لري
د نصب، کارولو، ساتنې، او ترمیم لپاره. - موقف په مناسب ځای کې ځای په ځای کړئ.
- د نصبولو اړوند وسایل چمتو دي، لکه پیچ، رنچ، او نور.
د پورته تایید کولو وروسته، روبوټ د بیس د پورته کولو سطح ته حرکت ورکړئ، د روبوټ موقعیت تنظیم کړئ، او د روبوټ بیس فکس کولو سوري د بیس د پورته کولو سطحه سوري سره سیده کړئ.
یادونه: کله چې په ایونټینګ بیس کې د روبوټ موقعیت تنظیم کړئ ، مهرباني وکړئ د روبوټ مستقیم د بیس د پورته کیدو سطح باندې فشار ورکولو څخه مخنیوی وکړئ ترڅو د سکریچونو مخه ونیسئ. کله چې روبوټ په لاسي ډول حرکت کوي، مهرباني وکړئ د روبوټ بدن ضعیف برخې ته د بهرني ځواک پلي کولو څخه ډډه وکړئ ترڅو روبوټ ته د غیر ضروري زیان مخه ونیسي.
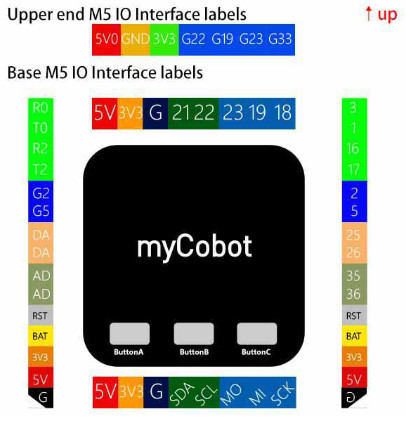
3.3 بریښنایی او بریښنایی
myCobot درې بهرني ټرمینلونه لري. دا په بیس کې د M5Stack Basic بهرني ټرمینلونه دي، د بریښنا ساکټ ته نږدې دوه Grove ټرمینلونه او د M5Stack Atom J6 ګډ خارجي ټرمینل پنونه دي.
الف) M5STACK بنسټیز بریښنایی ډیاګرام

b) M5STACK اتوم سرکټ ډیاګرام
ج) IO انٹرفیس ډیاګرام
سافټویر
د سافټویر تازه معلوماتو لپاره، مهرباني وکړئ لومړی زموږ ګیتوب وګورئ. https://github.com/elephantrobotics/myCobot
4.1 د فرم ویئر اپ گریڈ او ریکوری - زما سټوډیو
زما سټوډیو زما د روبوټ / مایکوبیوټا روبوټونو لپاره یو تمځای پلیټ فارم دی.
زما د سټوډیو اصلي دندې دا دي: 1) د فرم ویئر تازه کول؛ 2) د روبوټ کارولو څرنګوالي په اړه ویډیو لارښوونې چمتو کړئ؛ 3) د ساتنې او ترمیم معلومات چمتو کړئ (لکه ویډیو ټیوټوریلونه، پوښتنې او ځوابونه، او داسې نور).
د MyStudio په اړه د یوټیوب ویډیوګانو لینک دی: https://youtu.be/Kr9i62ZPf4w
که تاسو اړتیا لرئ خپل مایکبیوټا لوړ کړئ یا وساتئ، ډاډ ترلاسه کړئ چې د پراختیا چاپیریال تنظیم شوی. که نه، مهرباني وکړئ لومړی د سیریل پورټ ډرایور نصب کړئ او بیا د سافټویر کارولو هڅه وکړئ. د کښته کولو لینک په لاندې ډول دی:
رسمي webسایټ: https://www.elephantrobotics.com/myCobot/
ګیتوب: https://github.com/elephantrobotics/MyStudio/
که تاسو د وینډوز سیسټم کاروئ، مهرباني وکړئ د ډاونلوډ کولو لپاره "my studio-windows.exe" غوره کړئ، او بیا یې د خپل پروژې فولډر کې خلاص کړئ. محتاط اوسئ چې دا د پیچلو لارو سره مه کاروئ، کوم چې ممکن د ناپیژندل شویو لارو سره ستونزې رامینځته کړي.
که ستاسو د پراختیا چاپیریال لا دمخه تنظیم شوی وي ، تاسو کولی شئ مستقیم خلاص کړئ file "myCobot. exe ".
د پرانیستلو وروسته، انٹرفیس په لاندې ډول دی: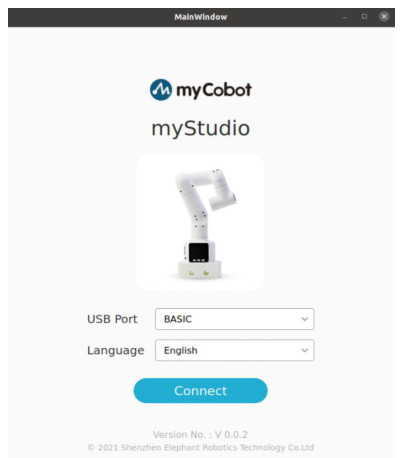
خپل myCobot د "بنسټیز" یا "اتوم" سره وصل کړئ، "ژبه" غوره کړئ او بیا اصلي انٹرفیس ته د ننوتلو لپاره "Connect" کلیک وکړئ لاندې ښودل شوی: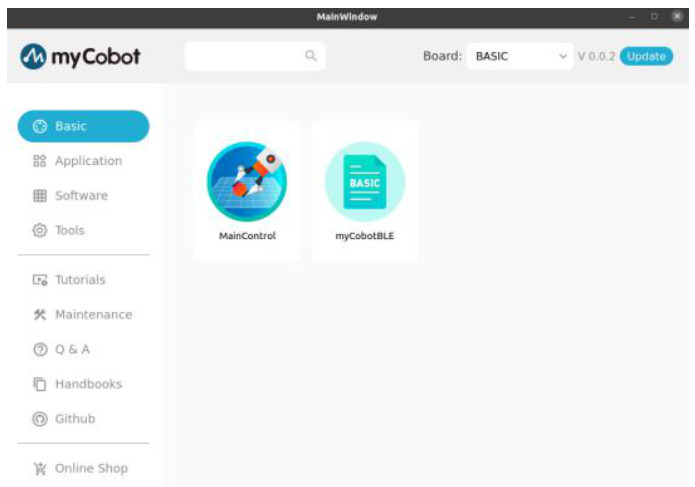
که تاسو اساسی او اتوم دواړه سره وصل کړئ ، هغه سافټویر غوره کړئ چې تاسو یې غواړئ په پورتنۍ ښیې کونج کې د بورډ بار کې بیا وسوځئ ، او بیا د هغه فرم ویئر غوره کولو لپاره اساسی یا وسیلې کلیک وکړئ چې تاسو یې سوځول غواړئ.
4.2 جوړ شوی ټریک ریکارډ
د M5STACK بنسټیز اصلي کنټرول بورډ 3 بټونه لري چې د دودیز پروګرام کولو او ډیټا لیکلو ملاتړ کوي. دا برنامه خلاص سرچینه ده ، تاسو کولی شئ زموږ GitHub وګورئ.
د ښوونې او روزنې مظاهره
- ثبت کول: د ثبت کولو حالت ته د ننوتلو وروسته ، د ثبت کولو ذخیره کولو ځای غوره کړئ

تڼۍ A: رام ته ذخیره کول
بټن بټن: د میموري کارت ذخیره کول
تڼۍ C: د ثبت کولو حالت څخه وتل - ثبت کول پیل کړئ

د ذخیره کولو ځای غوره کولو وروسته ، د هدف عمل بشپړولو لپاره په لاسي ډول روبوټیک بازو کش کړئ ، بیا به عمل ثبت او زیرمه شي. - لوبه وکړئ

تڼۍ A: د ثبت شوي عمل پلی کول پیل کړئ
تڼۍ ب: وقفه
تڼۍ C: د پلی بیک څخه وتل
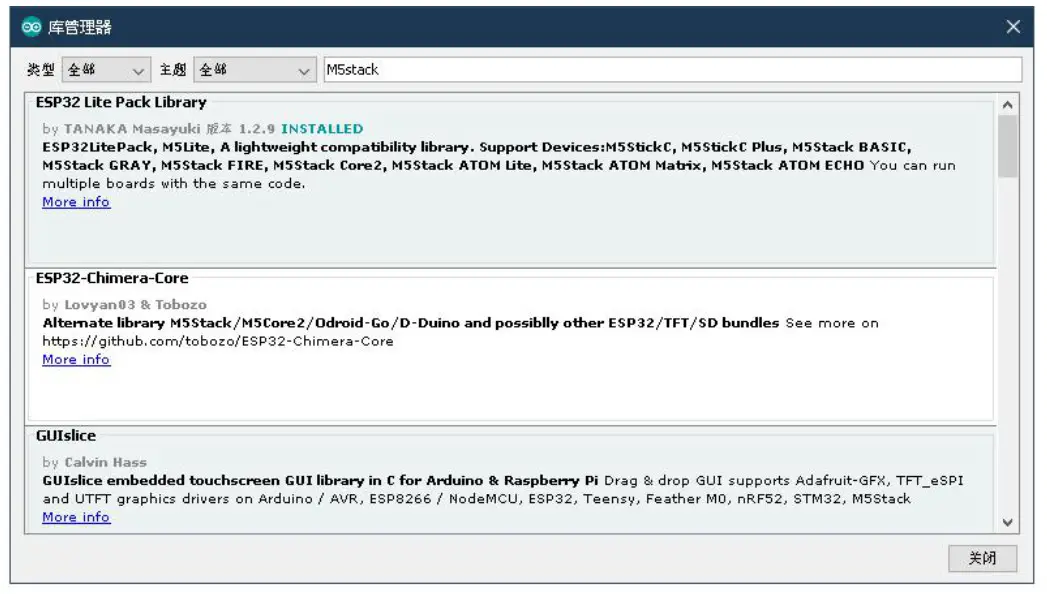
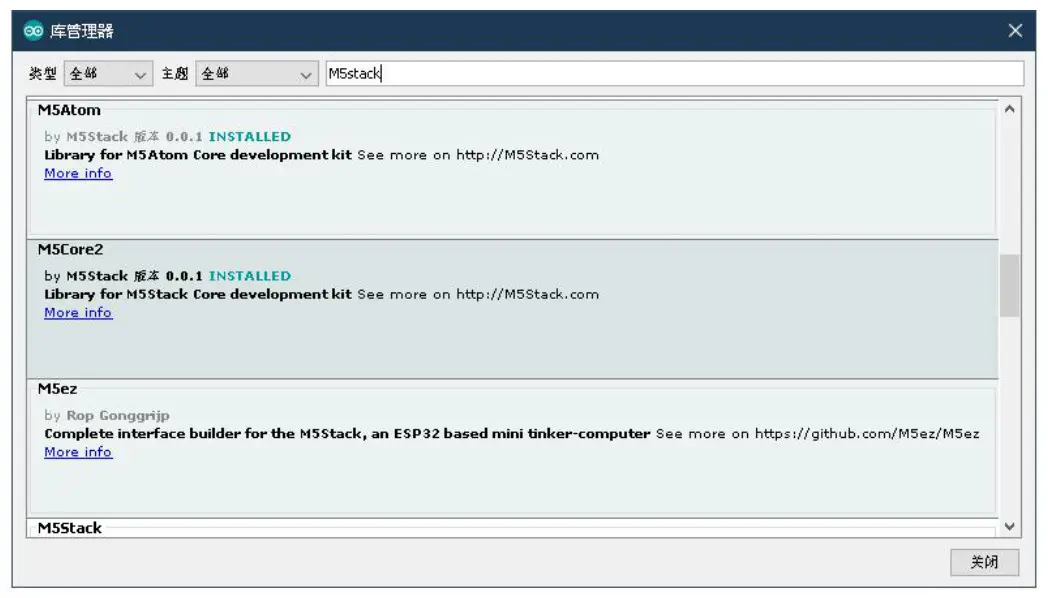
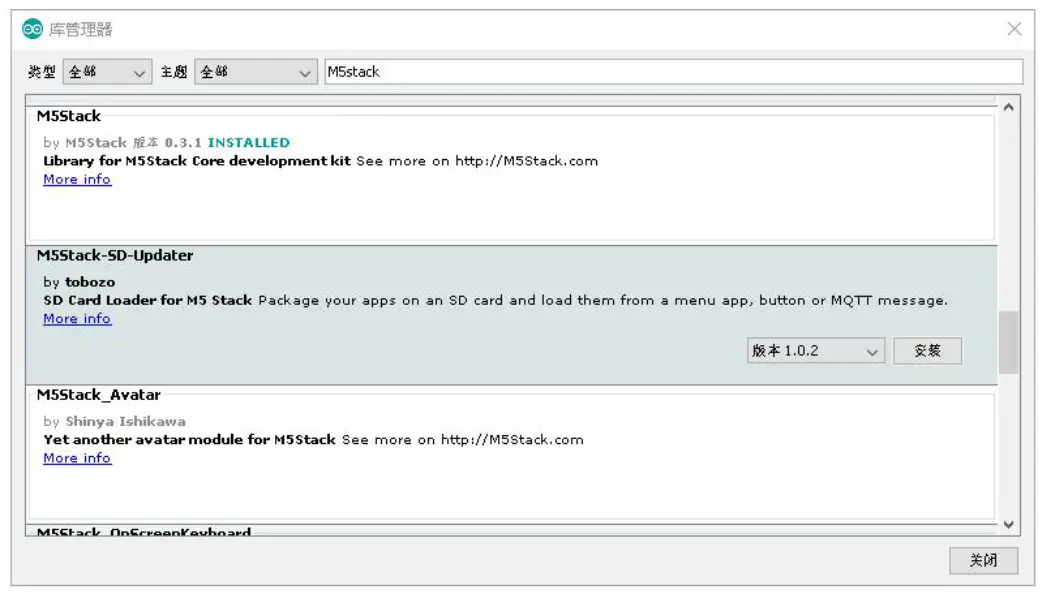
4.3 د Arduino کتابتونونه
کتابتون د کوډونو ټولګه ده چې تاسو ته اجازه درکوي په اسانۍ سره وصل شئ او سینسرونه، نندارې، ماډلونه، او نور استعمال کړئ.ampلی، جوړ شوی LiquidCrystal کتابتون کولی شي د کرکټر LCD نندارې سره اسانه اړیکه احساس کړي.
د Arduino پرمختیا بورډ دندې د کتابتون کارولو په وخت کې پراخ کیدی شي. د کتابتون له امله، موږ کولی شو په اسانۍ سره د Arduino او بهرني هارډویر یا ډیټا اړیکو ترمنځ همکاري احساس کړو. Arduino IDE د معیاري کتابتون لړۍ سره دمخه نصب شوی files. په ورته وخت کې، تاسو کولی شئ د دریمې ډلې کتابتونونه نصب او وارد کړئ (لکه د انټرنیټ څخه ډاونلوډ شوي خلاصې سرچینې کتابتونونه) په Arduino IDE کې. تاسو حتی کولی شئ کتابتونونه جوړ کړئ او په Arduino IDE کې یې وارد کړئ. د کتابتون شتون له کاروونکو سره مرسته کوي چې نور ځانګړي محتويات لکه راجسترونه او د ادرس پوائنټرونه له پامه وغورځوي، د پرمختګ ستونزې خورا کموي. که تاسو اړتیا لرئ پوه شئ چې څنګه د ARDUINO IDE نصبولو لپاره د دریمې ډلې کتابتونونه اضافه کړئ، مهرباني وکړئ د ډرایور نصبولو پته او میتود ته مراجعه وکړئ: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development تاسو کولی شئ د نورو معلوماتو لپاره زموږ ګیتوب هم وګورئ. https://github.com/elephantrobotics/myCobot
تاسو کولی شئ د نورو معلوماتو لپاره زموږ ګیتوب هم وګورئ. https://github.com/elephantrobotics/myCobot
په لاندې ډول:
4.4 API انٹرفیس او ارتباط
- UNIFLOW
- Arduino
- مایکرو پیتون
- FreeROTS
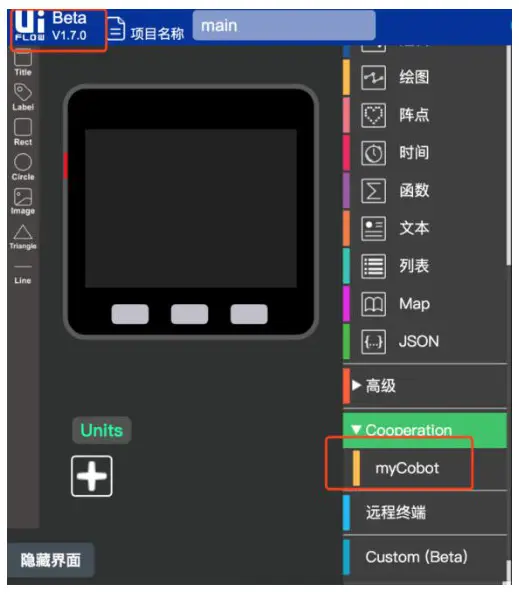
4.4.1 UIFlow
د UIFlow بیټا نسخه وکاروئ او همکاري غوره کړئ - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS د پراختیا لاندې دی او د پرمختګ سره سم به تازه شي.
د 12.31 پورې:
- د ROS تنظیم تازه کړی نو یا هم Python2 یا 3 کولی شي اوس نصب کړي.
- د دې پرځای په لاسي ډول سیریل پورټ ته ننوتلو ته بدلون ورکړئ ، نو د وینډوز کارونکي کولی شي مستقیم پرمخ بوځي.
- په API کتابتون کې د نوي انٹرفیس توضیحي سند تازه کړئ ، مهرباني وکړئ "README" وګورئ.
- 4.6 ګډ انډول کول
که ستاسو موبوټ اړتیاو ته اړتیا لري چې جوڑونه کیلیبریټ کړي، مهرباني وکړئ د مایکوبیوټا یا ارډوینو فرم ویئر وکاروئ لومړی د کیلیبریشن سوځولو لپاره.
د فرم ویئر اپلوډ کولو وروسته، بنسټیز انٹرفیس لاندې ښودل شوی:
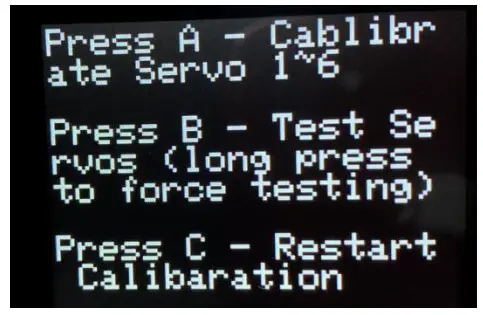
په دې وخت کې، J1 د نالی سره سم معیاري صفر موقعیت ته وګرځوئ، او د A تڼۍ (کیڼ اړخ تڼۍ) کېکاږئ، نو J1 به د متحرک حرکت څخه یو جامد حالت ته لاړ شي او دې معیاري صفر موقعیت ته به ثابت شي.
د پاتې J2-J6 تنظیم کولو لپاره د دې میتود تعقیب ګامونه تکرار کړئ. وروسته له دې چې J6 تنظیم شي، A کیلي (کیڼ کیلي) بیا فشار ورکړئ ترڅو ټول ترتیبات خوندي کړئ.
کله چې ټول جوړونه بیرته معیاري صفر حالت ته راشي، تاسو باید دا هم وګورئ چې ایا myCobot کولی شي په نورمال ډول کار وکړي. د B تڼۍ (منځنۍ تڼۍ) فشار ورکړئ، بیا به زما روبوټ په ترتیب سره J1 څخه J6 کشف کړي.
مهرباني وکړئ ډاډ ترلاسه کړئ چې په عملیاتي حد کې هیڅ خنډ یا د پرسونل مداخله شتون نلري ترڅو د ازموینې پرمهال تجهیزاتو او پرسونل ته د زیان مخه ونیسي.
بصری پروګرامونه او صنعتي سافټویر
5.1 د بصری پروګرام کولو سافټویر - UIFlow
د تفصيلي کارونې لپاره، مهرباني وکړئ د لاندې لینک څخه د UI فلو عملیات لارښود ترلاسه کړئ.
M5STACK اساسی: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK اتوم: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 د صنعتي لید پروګرام کولو سافټویر-RoboFlow
myCobot د RoboFlow ملاتړ کوي د Elephant Robotics صنعتي همکار روبوټونو لخوا عملیات کوي. د روبو فلو د عملیاتو پروسه ساده او کارول اسانه دي ، او متقابل انٹرفیس روښانه او د پوهیدو لپاره اسانه دی ، کوم چې د کاروونکو لپاره ګړندي ماسټر او کارولو لپاره اسانه دی ، او په مؤثره توګه کاروونکو سره مرسته کوي چې عملیات او برنامې په مؤثره توګه بشپړ کړي. حتی نوي کارونکي هم کولی شي د ساده عملیاتو له لارې هدف دندې ترلاسه کړي.
د تفصيلي کارونې لپاره، مهرباني وکړئ د لاندې لینک څخه د روبو فلو عملیاتو لارښود ترلاسه کړئ.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
د پلور وروسته خدمت
- د بیرته راستنیدو خدمت د هغو توکو پورې محدود دی چې د محصولاتو لوژستیک رسید نیټې وروسته په 7 ورځو کې نه خلاصیږي. د بار وړلو یا نور خطرونه چې په بدل کې اخیستل کیږي باید د پیرودونکي لخوا برداشت شي.
- پیرودونکي باید د پیرود رسید او تضمین کارت د تضمین تصدیق په توګه چمتو کړي کله چې د تضمین غوښتنه کیږي.
- د هاتی روبوټکس به د تضمین دورې په جریان کې د عادي کارونې له امله رامینځته شوي محصولاتو هارډویر نیمګړتیاو لپاره مسؤل وي.
- د تضمین موده د پیرود نیټې یا د لوژستیک رسید نیټې څخه پیل کیږي.
- د محصولاتو نیمګړتیاوې به د Elephant Robotics ملکیت وي، او د اړتیا په صورت کې به مناسب لګښت واخیستل شي.
که تاسو د تضمین خدمت لپاره غوښتنه کولو ته اړتیا لرئ، مهرباني وکړئ د تفصيلي معلوماتو تصدیق کولو لپاره لومړی زموږ د پیرودونکي خدمت سره اړیکه ونیسئ. لاندې د تفصيلي اجزاو تضمین شرایط دي:
یادونه: که چیرې د محصول بروشر سره ټکر وي، د کارن لارښود باید غالب شي.
الف) قطع موټور
| د تضمین موده | تضمین خدمتونه |
| ≤1 میاشت | Elephant Robotics یو وړیا نوی سیور موټور وړاندې کوي او بار وړي. |
| 1-3 میاشتې | د Elephant Robotics وړیا نوی سیور موټور وړاندې کوي، ګمرکونه باید بار بار کړي |
| ≥3 میاشتې | پیرودونکي باید دا پخپله واخلي. |
ب) بریښنایی پرزې (M5 هارډویر)
| د تضمین موده | تضمین خدمتونه |
| ≤3 میاشتې | پیرودونکي اړتیا لري چې دا د بې ځایه کولو وروسته بیرته واستوي، د Elephant Robotics باید یو نوی وړیا واستوي او بار او کور ته یې لیږدوي. |
| 3-6 میاشتې | پیرودونکي اړتیا لري چې دا د بې ځایه کولو وروسته بیرته واستوي او بار بار او کور ته بوځي، Elephant Robotics به یو نوی وړیا واستوي. |
| ≥6 میاشتې | پیرودونکي باید دا پخپله واخلي. |
ج) ساختماني برخې، په شمول د شیل برخې
| د تضمین موده | تضمین خدمتونه |
| ≤1 کال | Elephant Robotics یو ځل وړیا نوې برخې وړاندې کوي، ګمرکونه به د بار وړلو مسولیت ولري. |
| ≥1 کال | پیرودونکي باید دا پخپله واخلي. |
د تحویل شوي محصول د تضمین دورې په جریان کې ، شرکت یوازې هغه نیمګړتیاوې ترمیموي چې د روبوټ عادي کارونې پرمهال پیښیږي وړیا. په هرصورت، په لاندې قضیو کې، پیرودونکي به د ترمیم لپاره چارج شي (حتی د تضمین دورې په جریان کې):
- د غلط استعمال او ناسم کارونې له امله رامینځته شوي زیان یا نیمګړتیا له لارښود څخه توپیر لري.
- د پیرودونکي لخوا د غیر مجاز تحلیل له امله ناکامي.
- زیان د ناسم تنظیم یا غیر مجاز ترمیم له امله رامینځته شوی.
- زیانونه د طبیعي پیښو لکه زلزلې او سیلابونو له امله رامینځته کیږي.
مهرباني وکړئ د روبوټ چلولو لپاره پدې لارښود او اړوند لارښود کې لارښوونې په کلکه تعقیب کړئ.
پوښتنه او ځواب:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
پوښتنه: تالیف کوونکی ونشو کولی اړوند وسیله ومومي؟
ځواب: وسیله یوازې د پراختیایي چاپیریال له تنظیمولو او د اړوندې پروژې کتابتون له نصبولو وروسته رامینځته کیدی شي.
پوښتنه: تالیف کوونکی نشي کولی s تالیف کړيampد اړونده وسیله موندلو لپاره په سمه توګه برنامه؟
ځواب: د پروژې د اړتیا وړ کتابتون نه دی نصب شوی یا د پروژې له کتابتون سره ټکر لري. مهرباني وکړئ وګورئ چې د پروژې کتابتون لومړی په سمه توګه نصب شوی. که دا په سمه توګه نصب شوی وي او بیا هم تالیف نشي کولی، مهرباني وکړئ د Arduino پرمختیا چاپیریال بیا نصب کړئ.
پوښتنه: ATOM ته د فرم ویئر سوځولو وروسته وسیله په سمه توګه کار کولو کې پاتې راغلی؟
A: د ATOM ترمینل لپاره فرم ویئر زموږ د فابریکې فرم ویئر کارولو ته اړتیا لري. که کوم بل فرم ویئر په ناڅاپي ډول سوځیدلی وي، تاسو کولی شئ د ATOM ترمینل سوځولو لپاره "myCobot ATOM ATOMMAIN" غوره کړئ.
پوښتنه: په عمودي حالت کې یو څه ګډوډ شتون لري مګر په حرکت حالت کې نه؟
ځواب: مهرباني وکړئ وګورئ چې زما روبوټ په عمودی حالت کې دی. مایکوبیوټا په عمودی حالت کې د جاذبې له امله نه اغیزمن کیږي، میخانیکي خلا کولی شي د کوچنیو ډبرو لامل شي. مګر کله چې دا د عمودی حالت څخه بهر وي هلته به ټپونه نه وي. وړاندیز شوی سرعت په عمودی حالت کې 400-500 دی.
پوښتنه: ایا د ROS سیسټم به وروسته چارج شي؟
A: ROS خلاص سرچینه ده او زموږ ګیتوب ته به تازه شي. د فرم ویئر اپ گریڈونو لپاره هیڅ فیس نشته.
موږ سره اړیکه ونیسئ
که تاسو کومې مرستې ته اړتیا لرئ، مهرباني وکړئ موږ سره اړیکه ونیسئ په لاندې ډول ښودل شوي.
د شینزین Elephant Robotics Technology Co., Ltd
پته: B7، یونګو نوښت صنعتي پارک 2، نانشان، شینزین، چین
بریښنالیک: support@elephantrobotics.com
تلیفون: +86(0755)-8696-8565 (د کار ورځ 9:30-18:30)
Webسایټ: www.elephantrobotics.com
ټویټر: CobotMy

اسناد / سرچینې
 |
Elephant Robotics MyCobot Six-Axis Colaborative Robot Arm [pdf] د کارونکي لارښود MyCobot، شپږ-محور همکار روبوټ بازو، MyCobot شپږ-محور همکار روبوټ بازو، V20210309 |



