![]() Manwal sa Gumagamit
Manwal sa Gumagamit![]()

Deklarasyon sa Copyright
Walay yunit o indibidwal ang mahimong mokuha, mag-compile, maghubad o mokopya sa bisan unsang sulod niini nga manwal (pananglitan: teknikal nga dokumentasyon, software, ug uban pa), ni ipakaylap sa bisan unsang porma (lakip ang mga materyales ug publikasyon) nga walay sinulat nga pagtugot sa Shenzhen Elephant Robotics Technology Co ., Ltd. (gitawag nga "Elephant Robotics").
Dugang pa, ang impormasyon sa produkto ug may kalabutan nga mga kapanguhaan nga gihisgutan niini nga manwal alang lamang sa pakisayran ug ang mga sulod mahimong mausab nga walay pahibalo.
Gawas sa dayag nga gipahayag niini nga manwal, walay bisan unsa niini nga manwal ang angay isipon nga bisan unsang warranty o garantiya sa Elephant Robotics sa personal nga kapildihan, kadaot sa kabtangan, o kaangayan alang sa usa ka partikular nga katuyoan. Ang tanan nga mga katungod gigahin!
|
Bersyon |
Deskripsyon |
Nota |
| V 2020.12.31 | Gidugang nga picturer sa myCobot【standard set】, Base Assembly, ug End Assembly | |
| V 2021.02.04 | Gidugang nga picturer sa Coordinate System, MyStudio Software |
Tapos naview
Mahitungod sa manwal
Welcome sa paggamit sa MyCobot collaborative robot ug salamat sa imong pagpalit.
Kini nga manwal naghulagway sa mga panagana alang sa hustong pag-instalar ug paggamit sa MyCobot. Palihug basaha pag-ayo kining manwal ug uban pang may kalabutan nga mga manwal sa dili pa i-install kining robot system. Human sa pagbasa, palihug ibutang kini sa luwas nga dapit aron ma-access nimo kini bisan unsang orasa. Pagbasa sa mga butang sa manwal
Kini nga manwal gitumong sa:
- installer.
- Debugger.
- Mga kawani sa pagmentinar.
 |
Kadtong nag-install / nag-debug / nagmentinar sa MyCobot collaborative robot kinahanglan mabansay sa Elephant Robotics ug adunay mekanikal ug elektronik nga kahibalo nga gikinahanglan alang sa trabaho sa ibabaw. |
Unsaon paggamit
Kini nga manwal kinahanglang gamiton sa pagbuhat sa mosunod nga mga buluhaton:
- Buhat sa pag-install: Ibalhin ang robot sa posisyon sa pagtrabaho ug ayo kini sa base sumala sa mga panudlo sa pag-install.
- Pag-debug: Pag-debug sa robot sa kahimtang sa pagtrabaho.
- Trabaho sa pagmentinar: regular nga sistema sa pagmentinar sa robot aron masiguro ang normal nga paglihok niini. Kung ang robot dili molihok tungod sa mga impluwensya sa kalikopan o dili husto nga operasyon sa tiggamit, o usa ka bahin sa sistema sa robot nga milabaw sa normal nga kinabuhi sa serbisyo, kinahanglan nga ayohon ang robot.
Mubo nga sulat:
- Kini nga manwal magamit sa internasyonal nga mga tiggamit, ingon man usab sa mga tiggamit sa Hong Kong, Macao, ug Taiwan.
- Kini nga manwal wala gi-update kanunay. Ang gi-update nga petsa mao ang numero sa bersyon. Ang mga tiggamit maka-download sa pinakabag-o nga bersyon gikan sa opisyal website sa Elephant Robot bisan unsang orasa.
Seguridad
Kini nga kapitulo nagdetalye sa kinatibuk-ang impormasyon sa kaluwasan alang sa mga tawo nga naghimo sa pag-instalar, pagmentinar, ug pag-ayo sa mga robot. Palihug basaha ug sabta ang mga sulod ug mga panagana niini nga kapitulo sa dili pa kini gamiton, i-install, ug gamiton.
1.1 Pag-ila sa Hazard
Ang kaluwasan sa nagtinabangay nga robot gibase sa premyo sa husto nga pag-configure ug paggamit sa robot, ug bisan kung ang tanan nga mga panudlo sa kaluwasan naobserbahan, ang kadaot o kadaot nga gipahinabo sa operator mahimo gihapon nga mahitabo. Busa, importante kaayo nga masabtan ang mga kapeligrohan sa kaluwasan sa paggamit sa robot, nga mapuslanon aron mapugngan ang mga problema sa dili pa kini mahitabo.
Ang mga lamesa 1-2~4 sa ubos mao ang kasagarang mga peligro sa kaluwasan nga mahimong anaa sa konteksto sa paggamit sa mga robot:
Talaan 1- 2 Peligroso nga peligro sa kaluwasan
 |
|
| 1 | Personal nga kadaot o kadaot sa robot tungod sa dili husto nga operasyon sa panahon sa pagdumala sa robot. |
| 2 | Personal nga kadaot o kadaot sa robot ang hinungdan tungod kay ang robot wala giayo ingon nga gikinahanglan, alang sa example, ang screw dili screwed o tightened, ug ang base dili igo sa stably pagsuporta sa robot alang sa high-speed nga kalihukan, hinungdan sa robot sa tip down. |
| 3 | Ang pagkapakyas sa paghimo sa tukma nga pag-configure sa function sa kaluwasan sa robot, o pag-instalar sa mga himan sa pagpanalipod sa kaluwasan, ug uban pa, mahimong hinungdan nga mapakyas ang pag-andar sa kaluwasan sa robot. |
Table1- 3 Mga risgo sa seguridad sa lebel sa pasidaan
 |
|
| 1 | Magduwa-duwa gamit ang robot, basin maigo ka sa nagdagan nga robot, o ma-tripan sa babag sama sa cable aron makapahinabog personal nga kadaot. |
| 2 | Ang dili awtorisado nga mga kawani nagbag-o sa mga parameter sa pagsumpo sa seguridad, hinungdan nga mapakyas o peligro ang function sa kaluwasan. |
| 3 | Ang mga garas ug mga tusok tungod sa hait nga mga ibabaw sama sa ubang mga himan sa palibot sa trabahoan o robot end effector. |
| 4 | Ang robot usa ka tukma nga makina ug ang pag-pedaling mahimong hinungdan sa kadaot sa robot. |
|
5 |
Kung ang clamp wala sa lugar o sa wala pa mapalong ang suplay sa kuryente sa robot o gipalong ang gigikanan sa gas (wala matino kung ang end effector lig-on nga nagkupot sa butang nga wala mahulog tungod sa pagkawala sa gahum). Kung ang clamped butang dili tangtangon, kini mahimong hinungdan sa kakuyaw, sama sa mga tawo nga nasamdan sa pagkahagsa. |
| 6 | Adunay peligro sa aksidente nga paglihok sa robot. Sa bisan unsang kahimtang kinahanglan nga mobarug ka sa ilawom sa bisan unsang axis sa robot! |
| 7 | Ang robot usa ka makina nga tukma. Kung dili kini ibutang nga hapsay sa panahon sa pagdumala, mahimo’g magpahinabog pagkurog ug mahimong hinungdan sa kadaot sa mga internal nga sangkap sa robot. |
Talaan 1- 4 Potensyal nga peligro sa kaluwasan nga mahimong moresulta sa electric shock
 |
|
| 1 | Ang paggamit sa dili orihinal nga kable mahimong magpahinabog wala mailhi nga peligro. |
| 2 | Ang pagkontak sa mga likido pinaagi sa mga gamit sa kuryente mahimong moresulta sa peligro sa pagtulo sa kuryente. |
| 3 | Mahimong adunay peligro sa electric shock kung ang koneksyon sa kuryente dili husto. |
| 4 | Siguruha nga dumalahon ang pag-ilis nga trabaho pagkahuman gipalong ang gahum sa controller ug mga kauban nga kagamitan ug gitangtang ang kurdon sa kuryente. Kung ang trabaho gihimo samtang ang koryente naka-on, mahimo’g hinungdan kini nga pagkurog o pagkadaot sa kuryente. |
1.2 Mga Pagbantay sa Kaluwasan
Ang mosunod nga mga lagda sa seguridad kinahanglang sundon kon gamiton ang akong robot:
- Ang mycobiota kay electrical equipment. Ang mga dili propesyonal nga technician dili makausab sa wire, kung dili, kini dali nga makadaot sa aparato o sa tawo.
- Ang DANGER, WARNING nga mga marka niini nga manwal kay dugang lamang sa mga pag-amping sa seguridad.
- Palihug gamita ang mycobiota sa espesipikong sakup sa palibot. Kung dili, ang paglabaw sa mga detalye ug kondisyon sa pagkarga makapamubo sa kinabuhi sa serbisyo sa produkto bisan makadaot sa kagamitan.
- Sa dili pa mag-operate ug magmentinar sa mycobiota, ang mga personahe nga responsable sa pag-instalar, operasyon, ug pagmentinar kinahanglang bansayon aron masabtan ang lain-laing mga pag-amping sa seguridad ug ang hustong pamaagi sa operasyon ug pagmentinar.
- Ayaw gamita ang mycobiota sa adamp palibot sa dugay nga panahon aron malikayan ang kadaot, ang myCobot nahisakop sa katukma nga mga sangkap sa elektroniko.
- Ayaw gamita ang mycobiota sa taas nga temperatura nga palibot. Ang gawas nga nawong sa mycobiota gihimo sa photosensitive resin isip hilaw nga materyal, taas nga temperatura makadaot sa kabhang ug mosangpot sa kapakyasan.
- Ang labi ka makadaot nga paglimpyo dili angay sa paglimpyo sa mycobiota. Ang anodized nga mga sangkap dili angay alang sa paglimpyo sa pagpaunlod.
- Ayaw gamita ang akong robot nga walay mounting base aron malikayan ang kadaot sa mga ekipo o mga aksidente. Ang myCobot kinahanglan gamiton sa usa ka pirmi ug dili makabalda nga palibot.
- Ayaw gamita ang ubang mga power adapters sa paghatag og kuryente sa myCobot Kung kini nadaot tungod sa paggamit sa usa ka nonconforming adapter, kini dili iapil sa after-sales service.
- Palihug ayaw pagdisassemble o tangtangon ang mga screw ug ang ilang kabhang. Kung giablihan kini, walay serbisyo sa warranty ang mahatag.
- Ang mga tawo dili makaayo sa myCobot kung wala’y propesyonal nga pagbansay. Kung adunay problema sa akong robot, palihug kontaka ang myCobot technical support engineer sa oras.
- Palihog pagtuman sa mga may kalabutan nga mga balaod sa pag-atubang sa gibasura nga mycobiota, ug pagpanalipod sa kinaiyahan.
- AYAW pasagdi ang mga bata nga magdula sa akong robot nga mag-inusara. Ang tanan nga mga proseso kinahanglan nga bantayan samtang nagdagan. Human mahuman ang mga proseso, palihog palonga dayon ang kagamitan.
- Gidili ang pag-usab o pagtangtang sa mga nameplate, mga instruksyon, mga icon, ug mga marka sa robotic nga bukton ug sa mga may kalabutan nga kagamitan.
- Ayaw pagsunog sa ubang mga driver sa produkto sa terminal Atom. Kung ang aparato nadaot tungod niana, dili kini iapil sa serbisyo pagkahuman sa pagbaligya.
Palihug ayaw gamita ang Chatbot collaborative robot alang sa mosunod nga mga katuyoan. - Mga aplikasyon sa medikal ug kritikal sa kinabuhi.
- Sa usa ka palibot nga mahimong hinungdan sa usa ka pagbuto.
- Direkta nga gigamit nga wala’y pagsusi sa peligro.
- Dili igo nga paggamit sa lebel sa function sa kaluwasan.
- Dili makanunayon nga paggamit sa mga parameter sa pasundayag sa robot.
Kung aduna kay pangutana mahitungod niini nga manwal palihog bisitaha ug isumite ang imong feedback sa:https://www.elephantrobotics.cn.
1.3 Mga senaryo sa paggamit
Mahitungod sa mycobiota
2.1 Background
Pagsuporta sa misyon sa "Enjoy Robots World", ang Elephant Robotics nagdisenyo ug nagpalambo sa mycobiota, ang pinakagamay ug labing gaan nga kolaborasyon nga robot sa kalibutan, nga nagpabilin ang kadaghanan sa mga gimbuhaton sa mga robot sa industriya. Uban sa compact ug elegante nga industriyal nga disenyo, maayo ug gamhanan nga performance, ug dako nga software ug hardware development space, ang myCobot adunay walay kinutuban nga mga posibilidad sa pagpalapad sa aplikasyon.
Ang design prototype sa mycobiota gikan sa All-in-one Robot nga gilusad sa Elephant Robot sa China niadtong 2018. Isip unang integrated collaborative robot sa China, nakadaog kini sa 2019 CAIMRS Industrial Robot Innovation Award ug 2019 High-tech Robot Annual “Innovation Technology ward", ug gibaligya usab sa labaw pa sa 30 ka mga nasud sa balay ug sa gawas sa nasud, nga nakadawat nagkahiusa nga pagdayeg ug pag-ila gikan sa mga pabrika sa nag-unang 500 nga mga negosyo sa kalibutan.
2.2 Pasiuna
Ang mycobiota mao ang pinakagamay ug labing gaan nga unom ka axis nga kolaborasyon nga robot sa kalibutan, hiniusang gihimo sa Elephant Robotics ug M5Stack. Kini labaw pa sa usa ka himan sa pagka-produktibo nga puno sa imahinasyon, mahimong magpadayon sa sekondaryang pag-uswag sumala sa mga gipangayo sa mga tiggamit aron makab-ot ang personal nga pag-customize.
Uban sa usa ka gibug-aton sa 850g, usa ka payload sa 250g, ug usa ka bukton-gitas-on sa 350mm, myCobot mao ang compact apan gamhanan, dili lamang sa pagpares sa usa ka lain-laing mga end effectors aron ipahiangay sa lain-laing mga matang sa aplikasyon nga mga sitwasyon nagsuporta usab sa secondary kalamboan sa multi-platform software aron matubag ang mga panginahanglan sa lainlaing mga senaryo sama sa siyentipikong panukiduki ug edukasyon, intelihenteng balay, industriya sa gaan, ug komersyal nga aplikasyon.
myCobot – Panguna nga Parameter
| Degree sa Kagawasan | 6 |
| Payload | 250g |
| gitas-on sa bukton | 350mm |
| Radius sa pagtrabaho | 280mm |
| Pagkabalikbalik | ± 0.5mm |
| Timbang | 850g |
| Gahum nga Input | 8V, 5A |
| Kahimtang sa Pagtrabaho | -5°~45° |
| Komunikasyon | USB Type-C |
2.3 Mga bahin
- Talagsaon nga Pang-industriya nga Disenyo & Labi nga Compact
Ang mycobiota usa ka integrated modular nga disenyo ug motimbang lamang ug 850g nga sayon ra kaayong dad-on. Ang kinatibuk-ang istruktura sa lawas niini compact nga adunay gamay nga mga spare parts ug dali nga madisassemble ug mapulihan aron mahibal-an ang plug ug play. - Taas nga configuration & Nasangkapan sa 2 Screens
Ang myCobot adunay 6 nga high-performance nga servo motors nga adunay paspas nga pagtubag, gamay nga inertia, ug hapsay
pagtuyok. Ang lawas nagdala sa 2 nga mga display screen nga nagsuporta sa gipuasa nga librarya aron ipakita ang gipalapdan nga aplikasyon
talan-awon nga mas sayon ug klaro. - Lego Connector & Liboan ka M5STACK Ecological Application
Ang base ug katapusan sa mycobiota nasangkapan sa usa ka Lego Connector, nga angay alang sa pag-uswag sa lainlaing mga miniature nga naka-embed nga kagamitan. Ang base niini kontrolado sa M5STACK Basic, ug liboan ka mga kaso sa aplikasyon mahimong magamit direkta. - Blocky Programming ug Pagsuporta sa Industrial ROS
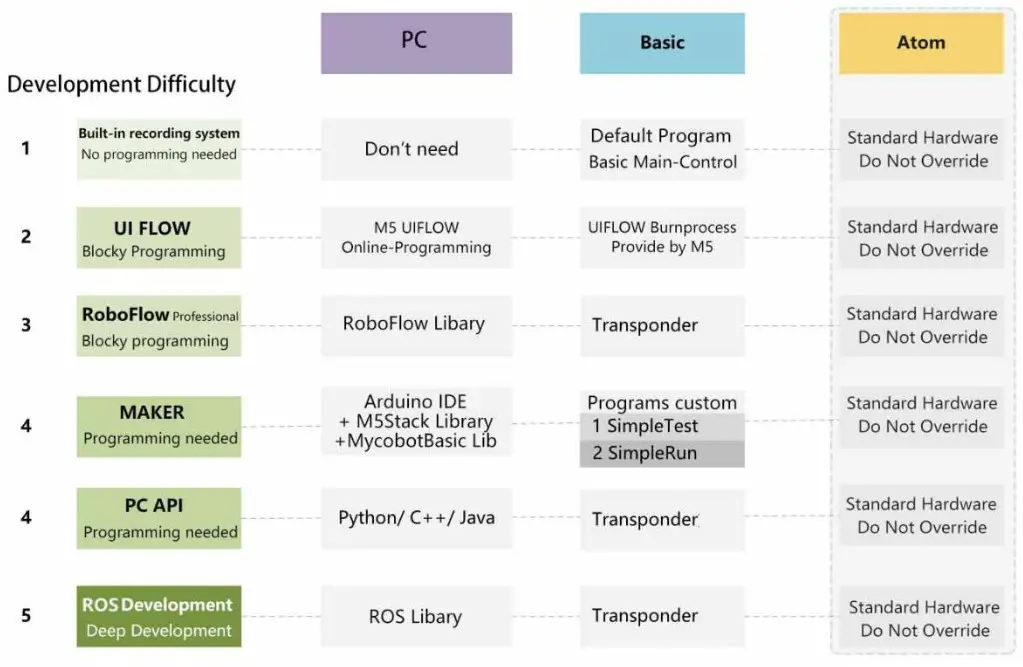
Gamit ang UIFlow visual programming software, ang pagprograma sa akong robot kay simple ug sayon para sa tanan.
Mahimo usab nimo gamiton ang RoboFlow, software sa mga robot nga pang-industriya gikan sa Elephant Robotics, nga nagsuporta sa daghang mga functional modules Arduino + ROS open-source system. - Pagrekord sa Pagsubay ug Pagkat-on pinaagi sa kamot
Isalikway ang tradisyonal nga point saving mode, gisuportahan sa myCobot ang pagtudlo sa pagsulay sa pag-drag aron irekord ang gitipig nga track ug makatipig hangtod sa 60mins nga lainlaing mga Track nga himuon nga dali ug makalingaw alang sa mga bag-ong magdudula nga makat-on.
2.4 nga Patente
May Kalabutan nga mga Patente bahin sa akong robot
|
Dili. |
Sertipiko No. | Ngalan sa Patente | Patent No. |
Patente |
| 1 | No.8194138 | Ang mekanikal nga bukton nga linkage ug usa ka mekanikal nga bukton | ZL 2018 20017484.4 | Elephant Robotics |
| 2 | No.8186088 | Ang mekanikal nga bukton nga joint connector ug usa ka mekanikal nga bukton | ZL 2017 21700594.2 | Elephant Robotics |
| Dili. | produkto | Tipo sa Patent | Titulo |
Patent No. |
| 1 | Gaan nga robotic nga bukton | Patente sa panagway | Kolektibong Robot Arm | 2020030683471.3 |
|
Dili. |
Titulo sa imbensyon |
Numero sa Aplikasyon |
| 1 | Pamaagi ug sistema alang sa pagpadayon sa postura sa robot, pag-drag, ug pagtudlo | ZL 2018 1 1634649.3 |
| 2 | Usa ka robot online collision detection method ug system base sa momentum model | ZL 2019 1 0030748.9 |
| 3 | Usa ka Matang sa Robot Dynamic Parameter Identification Method Independent sa Joint Angular Acceleration | ZL 2019 1 0773865.4 |
Hardware
3.1 Controller ug Actuator
3.1.1 M5STACK Basic Main Controller
M5STACK BASIC Kit, sama sa namesake niini, usa ka starter kit taliwala sa M5STACK development kit series.
Kini usa ka modular, stackable, scalable, ug portable device nga gipadagan sa usa ka ESP-32 core, nga naghimo niini nga open-source, ubos nga gasto, full-function, ug sayon alang sa mga developers sa pagdumala sa bag-ong produkto development sa tanan nga stages lakip na ang disenyo sa sirkito, disenyo sa PCB, software, disenyo sa agup-op, ug produksyon. Kini nga Basic Kit naghatag og usa ka mahigalaon nga presyo ug puno sa mga kapanguhaan nga naghimo niini nga usa ka maayo nga starter kit alang kanimo sa pagsuhid sa IoT.
Kung gusto nimo nga susihon ang labing paspas nga paagi sa IoT prototyping, ang M5STACK development board mao ang hingpit nga solusyon. Dili sama sa uban, ang M5STACK development board kay episyente kaayo, gitabonan sa industrial-grade case ug ESP32-based development board. Nahiusa kini sa mga module sa Wi-Fi & Bluetooth ug adunay usa ka dual-core ug 16MB nga SPI Flash. Uban sa 30+ M5Stack stackable modules, 40+ extendable units, ug lain-laing lebel sa program language, mahimo nimong himoon ug pamatud-an ang imong IoT nga produkto sa mubo nga panahon.
Nagsuporta nga mga platform sa pag-uswag ug mga programming language: Arduino, Blocky nga pinulongan nga adunay UIFlow, Micropython. Bisan unsa pa ang lebel sa kahanas sa pagprograma nga naa kanimo, ang M5STACK mogiya kanimo sa matag lakang sa paagi aron matuman ang imong ideya ingon man sa katapusan nga pag-produksyon. Kung nakadula ka sa ESP8266, imong mahibal-an nga ang ESP32 usa ka hingpit nga pag-upgrade gikan sa ESP8266. Sa pagtandi, ang ESP32 adunay daghang mga GPIO, daghang mga analog input, duha nga analog output, daghang dugang nga mga peripheral (sama sa usa ka ekstra nga UART). Ang opisyal nga nagpalambo nga plataporma ESP-IDF gibalhin sa FreeRTOS. Uban sa dual-core ug real-time nga OS, makakuha ka og mas organisado nga code ug usa ka taas nga tulin nga processor.
Ang M5STACK Basic gilangkuban sa duha nga magkabulag nga mga bahin. Ang upside nga bahin adunay tanan nga mga matang sa mga processor, chips, ug uban pang mga bahin sa slot. M-BUS socket, ug extendable pin sa duha ka kilid.
3.1.1.1 Mga Feature sa Produkto
- Gibase sa ESP32
- Built-in Speaker, Buttons, Color LCD, Power/Reset nga buton
- TF card slot (16G Maximum nga gidak-on)
- Magnetic suction sa likod
- Mapalapad nga mga Pin ug mga Lungag
- M-Bus Socket & Pins
- Platform sa Programa: UIFlow, MicroPython, Arduino
3.1.1.2 Parameter
| Mga kapanguhaan | Parameter |
| ESP32-D0WDQ6 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode nga Bluetooth |
| Flash | 16MB |
| Gahum nga Input | 5V @ 500mA |
| Dunggoanan | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Core Ubos nga Port | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS screen | 2 pulgada, 320 × 240 Mabulukon nga TFT LCD, ILI9342C, Brightness853nit |
| Speaker | 1W-0928 |
| Butang | Pasadya nga butones x 3 |
| Antenna | 2.4G 3D Antenna |
| Operating Temperatura | 32°F hangtod 104°F (0°C hangtod 40°C) |
| Net nga Timbang | 47.2g |
| Gross nga gibug-aton | 93g |
| Gidak-on sa Produkto | 54 x 54 x 18mm |
| Gidak-on sa Pakete | 95 x 65 x 25mm |
| Kaso nga materyal | Plastic (PC) |
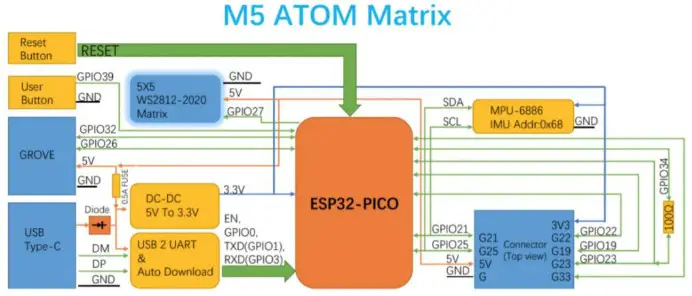
3.1.2 M5STACK Atom
Ang ATOM Matrix, nga adunay gidak-on nga 24 * 24mm lamang, mao ang labing compact development board sa M5Stack development kit series. Naghatag kini og daghang mga pin sa GPIO ug angayan kaayo alang sa dali ug gamay nga pag-uswag sa aparato.
Ang nag-unang kontrol nagsagop sa ESP32-PICO-D4 chip, nga nag-uban sa Wi-Fi ug Bluetooth nga mga teknolohiya ug adunay 4MB nga integrated SPI flash memory. Ang Atom board naghatag ug Infra-Red LED kauban ang 5 * 5 RGB LED matrix sa panel, usa ka built-in nga IMU sensor (MPU6886), ug usa ka HY2.0 interface. Usa ka kinatibuk-ang katuyoan nga programmable nga buton gihatag sa ilawom sa RGB Led matrix aron mahatagan ang mga tiggamit og suporta sa input sa ilang lainlaing mga proyekto. Ang onboard USB interface (Type-C) makapahimo sa paspas nga pag-upload ug pagpatuman sa programa. Usa ka M2 screw hole ang gihatag sa likod para sa pag-mount sa board.
Mubo nga sulat: Kung gamiton ang manipulator, palihug likayi ang pagsunog sa firmware sa ATOM sa katapusan sa manipulator. Gisuportahan ra sa aparato ang among orihinal nga firmware.
Palihug sabta pag-ayo ang kahasol nga gidala kanimo.
3.1.2.1 Mga bahin
- Gibase sa ESP32 PICO
- Programmable nga buton
- 5*5 RGB LED matrix panel (WS2812C)
- Gitukod-sa Infra-pula nga LED
- Gitukod-sa MPU6886 Inertial Sensor
- Mapalapad nga mga Pin ug mga Lungag
- Platform sa Programa: Arduino UIFlow
3.1.2.2 Espesipikasyon
| Mga kapanguhaan | Parameter |
| ESP32 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode nga Bluetooth |
| Flash | 4MB |
| Gahum nga Input | 5V @ 500mA |
| Dunggoanan | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Interface sa PIN | G19, G21, G22, G23, G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Infrared transmission |
| Butang | Custom ubos x 1 |
| Antenna | 2.4G 3D Antenna |
| Operating Temperatura | 32°F hangtod 104°F (0°C hangtod 40°C) |
| Net gibug-aton | 3g |
| Gross nga gibug-aton | 14g |
| Gidak-on sa produkto | 24 x 24 x 14 mm |
| Gidak-on sa pakete | 24 x 24 x 14 mm |
| Kaso nga materyal | Plastic (PC) |
3.1.3 Servo Motor
Ang myCobot nag-ambit sa 6 nga high-performance nga servo servos sa 6 nga mga lutahan sa advantages sa paspas nga tubag, gamay nga inertia, hapsay nga pagtuyok, lig-on nga torque, ug uban pa.
| Mga kapanguhaan | Parameter |
| Gidak-on | 23.2*12.1*28.5mm |
| Power input | 4.8~7.4V |
| Operating Temperatura | -15~70° |
| Gi-rate nga torque | 1.5kg.cm@6V |
| Kusog nga torsi | 4.5kg.cm@6V |
| Anggulo sa rotation | 300°(Anggulo mahimong limitado sa software) |
3.2 Mekanikal nga Istruktura
3.2.1 Gidak-on ug gidak-on sa pagtrabaho
A) mycobiota
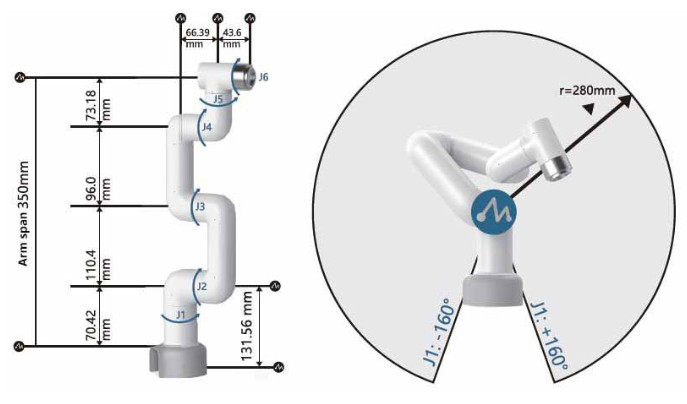
myCobot -Table of joint range of motion
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
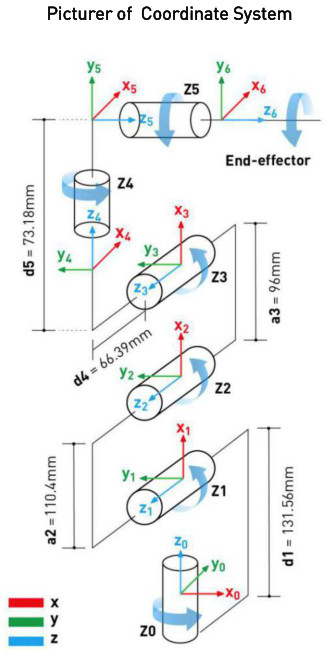
Picturer sa Coordinate System
B)Base nga Asembliya
Ang base kay compatible sa duha ka Lego-tech nga component hole ug through-hole screw hole.
C) Katapusan nga Asembliya
Ang katapusan nahiuyon sa parehas nga lungag sa sangkap sa Lego-tech ug ang screw nga hilo.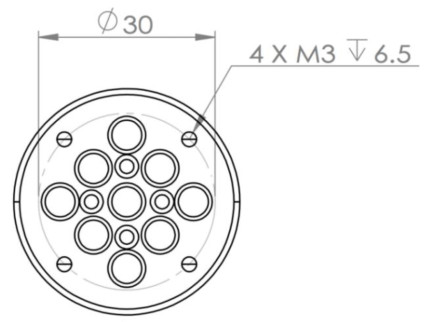
3.2.2 Pag-unpack ug Pag-instalar
3.2.2.1 Pag-unpack
Mubo nga sulat: Human mabutang ang kahon sa pagputos, palihug kumpirmahi nga ang pagputos sa robot wala madaot ug wala madaot. Kung adunay bisan unsang kadaot, palihug kontaka ang kompanya sa logistik ug ang lokal nga supplier sa oras. Human sa pag-unpack, palihug susiha ang aktuwal nga mga butang sa kahon sumala sa listahan sa mga butang.

| myCobot【standard set】 | -akongCobot-280 - Brosyur -Suplay sa kuryente -USB-Type C -Jumper -M4 * 35, stainless steel screw - Hexagon wrench |
Palihug i-install ang sistema sa robot sa usa ka palibot nga nagtagbo sa mga kondisyon nga gihulagway sa lamesa aron magamit ug mapadayon ang pasundayag sa makina ug magamit kini nga luwas.
Operating Environment ug Kondisyon
| Temperatura | -10 ℃ ~ 45 ℃ |
| Relatibong humidity | 20%~70% |
| Sulod/Sa gawas | Sa sulod |
| Laing kinahanglanon sa Kalikopan | -Likayi ang kahayag sa adlaw. -Ipahilayo sa abog, oily smoke, asin, iron filings, etc. -Ipahilayo sa masunog ug makadaot nga mga likido ug gas. -Ayaw pagkontak sa tubig. -Dili magpadala sa shock, vibration, ug uban pa. -Ipahilayo gikan sa kusog nga electromagnetic interference nga mga tinubdan. |
3.2.2.2 Pag-instalar
Ang aktuwal nga gibug-aton sa mycobiota collaborative robot mao ang 850g. Sa pagkonsiderar sa paglihok sa robot, ang sentro sa grabidad molihok samtang ang robot molihok. Busa, ang robot kinahanglan nga ayohon sa usa ka lig-on nga base aron magamit sa normal.
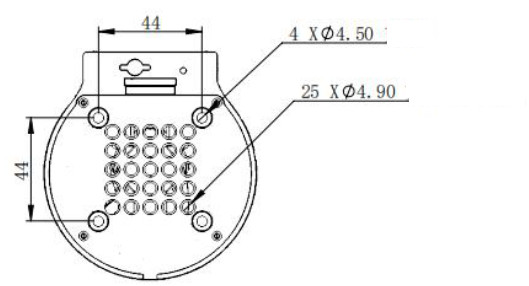
Gidak-on sa interface sa base sa robot: Ang lungag sa pag-ayo sa pedestal mao ang interface nga nag-ayo sa robot sa ubang mga base o eroplano. Ang piho nga gidak-on sa lungag gipakita ingon sa mosunod. Kini 4 pinaagi sa mga lungag nga adunay diyametro nga 4.5mm, nga mahimong ayohon sa M4 bolts.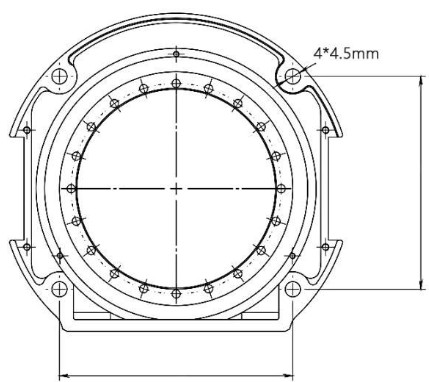
Siguruha nga adunay katugbang nga sinulid nga lungag sa gitakda nga base sa dili pa i-install. Sa dili pa nimo opisyal nga i-install, palihug kumpirmahi:
- Ang palibot nga i-install nagsunod sa mga kinahanglanon sa ibabaw.
- Ang posisyon sa pag-instalar dili ubos sa working range sa robot, ug adunay igo nga luna
alang sa pag-instalar, paggamit, pagmentinar, ug pag-ayo. - Ibutang ang baroganan sa hustong posisyon.
- Andam na ang mga himan nga may kalabotan sa pag-instalar, sama sa mga screw, wrenches, ug uban pa.
Human sa pagkumpirma sa ibabaw, ibalhin ang robot ngadto sa mounting surface sa base, i-adjust ang posisyon sa robot, ug i-align ang fixing hole sa robot base sa lungag sa mounting surface sa base.
Mubo nga sulat: Kung mag-adjust sa posisyon sa robot sa mounting base, palihug likayi ang pagduso sa robot direkta sa mounting surface sa base aron malikayan ang mga garas. Kung mano-mano ang paglihok sa robot, palihug sulayi nga likayan ang paggamit sa usa ka eksternal nga puwersa sa huyang nga bahin sa lawas sa robot aron malikayan ang wala kinahanglana nga kadaot sa robot.
3.3 Electronics ug Electrical
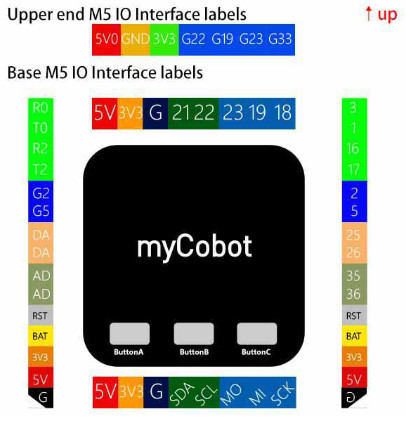
Ang myCobot adunay tulo ka eksternal nga terminal. Sila ang mga eksternal nga terminal sa M5Stack Basic sa base, ang duha ka Grove terminals duol sa power socket ug ang external terminal pins sa M5Stack Atom J6 joint.
a)M5STACK Basic Electrical Diagram

b)M5STACK Atom Circuit Diagram
c)IO Interface Diagram
Software
Alang sa mga update sa software, palihug tan-awa una ang among Github. https://github.com/elephantrobotics/myCobot
4.1 Pag-upgrade sa Firmware ug Pagbawi - akong studio
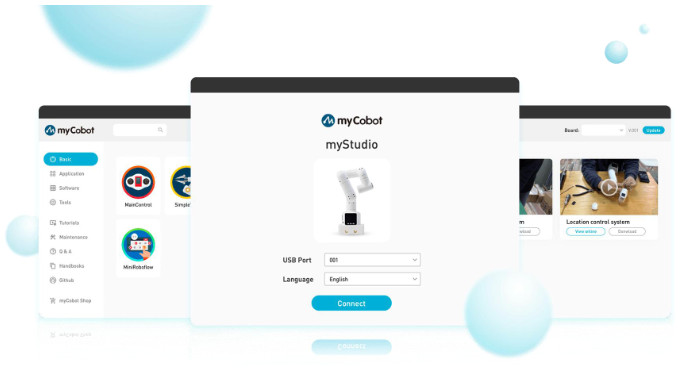
ang akong studio kay one-stop platform para sa mga robot sa akong robot/mycobiota.
Ang mga nag-unang gimbuhaton sa akong studio mao ang: 1) Pag-update sa firmware; 2) Paghatag ug video tutorial kon unsaon paggamit ang robot; 3) Paghatag ug impormasyon sa pagmentinar ug pag-ayo (sama sa mga video tutorial, Q&A, ug uban pa).
Ang link sa mga video sa youtube bahin sa myStudio mao ang: https://youtu.be/Kr9i62ZPf4w
Kung kinahanglan nimo nga i-upgrade o ipadayon ang imong mycobiota, siguruha nga na-set up ang development environment. Kung dili, palihug i-install una ang serial port driver ug dayon sulayi nga gamiton ang software. Ang link sa pag-download mao ang mosunod:
Opisyal website: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Kung mogamit ka og Windows system, palihog pilia ang "akong studio-windows.exe" aron ma-download, ug dayon i-unzip kini sa imong project folder. Pag-amping nga dili kini gamiton sa komplikado nga mga agianan, nga mahimong mosangput sa mga problema sa wala mailhi nga mga agianan.
Kung na-set up na ang imong development environment, mahimo nimong direktang ablihan ang file “akongCobot. exe".
Human sa pag-abli, ang interface mao ang mosunod: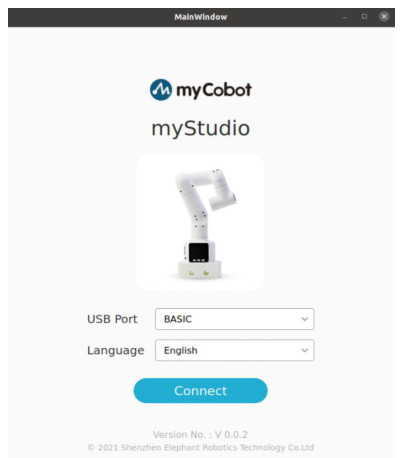
Ikonektar ang imong myCobot sa "Basic" o "Atom", pilia ang "pinulongan" ug dayon i-klik ang "Connect" aron makasulod sa main interface nga gipakita sa ubos: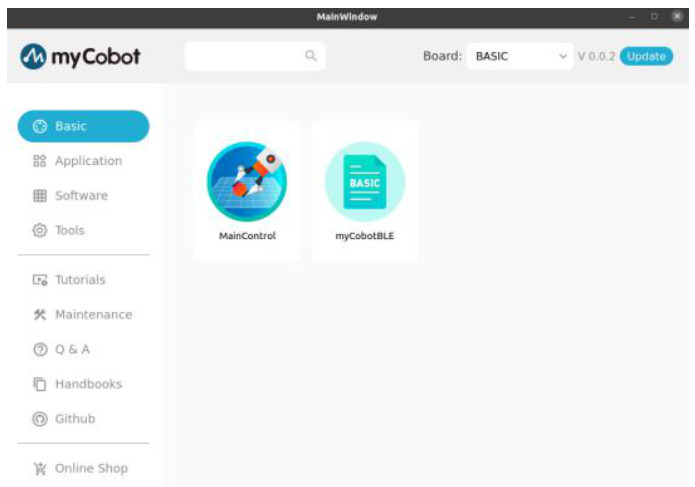
Kung imong ikonektar ang Basic ug Atom, Pilia ang software nga gusto nimong sunugon pag-usab sa Board bar sa taas nga tuo nga suok, ug dayon i-klik ang Basic o Tools aron mapili ang firmware nga gusto nimong sunugon.
4.2 Gitukod-sa Track Recording
Ang M5STACK Basic main control board adunay 3 ka buton nga nagsuporta sa custom programming ug data writing. Kini nga programa bukas nga gigikanan, mahimo nimong susihon ang among GitHub.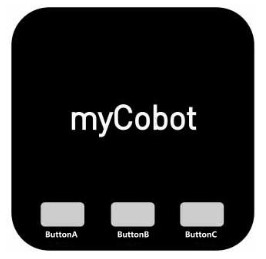
I-drag ang Demonstrasyon sa Pagtudlo
- Pagrekord: Pagkahuman sa pagsulod sa mode sa pagrekord, pilia ang lokasyon sa pagtipig sa pagrekord

Button A: Tindahan sa Ram
Button B: Tipigi sa Memory Card
Button C: Paggawas sa Recording Mode - Pagsugod sa Pagrekord

Pagkahuman sa pagpili sa lokasyon sa pagtipig, mano-mano nga i-drag ang robotic nga bukton aron makompleto ang target nga aksyon, dayon ang aksyon irekord ug itago. - Pagdula

Button A: Sugdi ang Pagdula sa Narekord nga Aksyon
Butang B: Paghunong
Butang C: Paggawas sa Playback
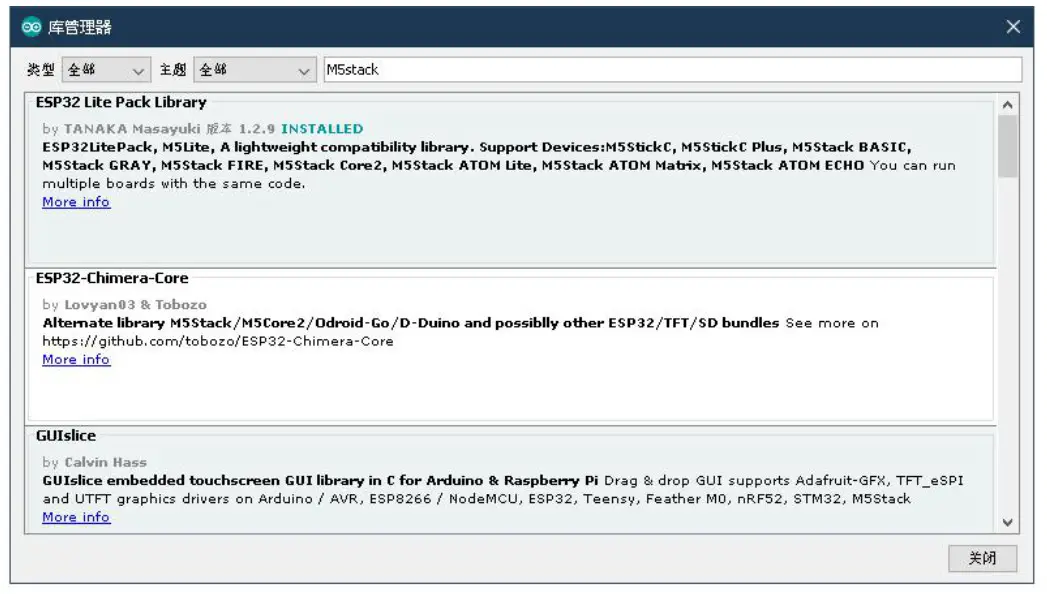
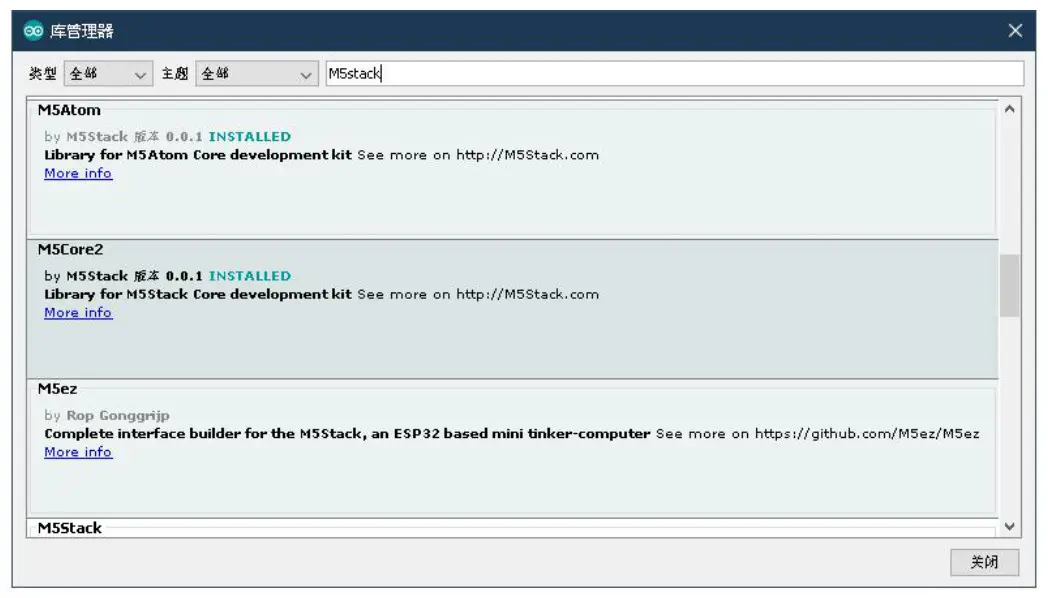
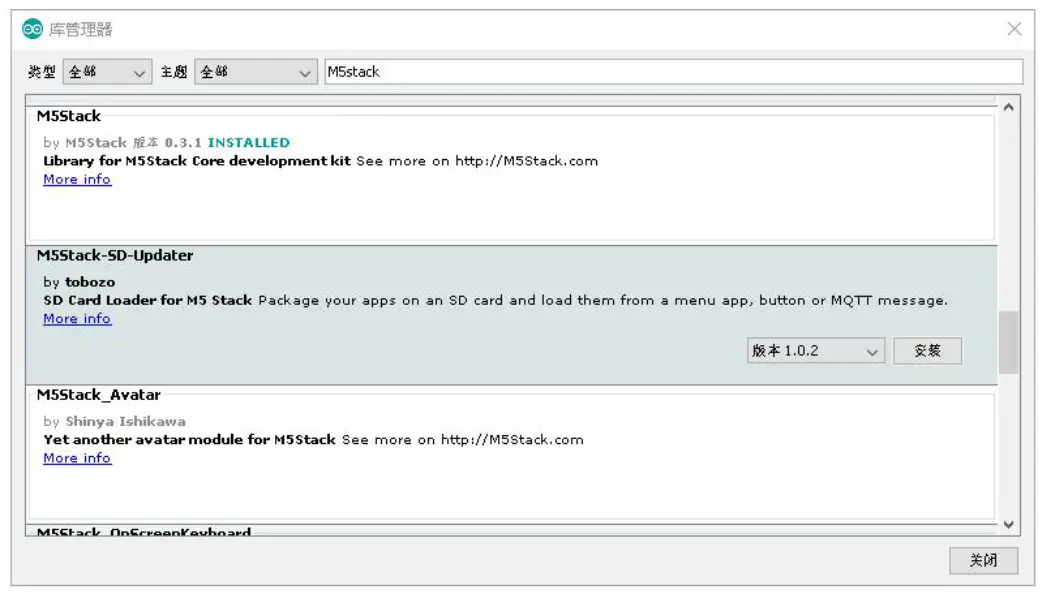
4.3 Arduino Libraries
Ang librarya usa ka koleksyon sa mga code nga nagtugot kanimo sa dali nga pagkonektar ug paggamit sa mga sensor, display, module, ug uban pa.ampSa pagkakaron, ang built-in nga LiquidCrystal library makaamgo sa sayon nga komunikasyon sa mga display sa LCD nga karakter.
Ang mga gimbuhaton sa Arduino development board mahimong mapalapad kung gamiton ang librarya. Tungod sa librarya, dali natong maamgohan ang kolaborasyon tali sa Arduino ug external hardware o data communication. Ang Arduino IDE na-pre-install uban ang serye sa standard library files. Sa samang higayon, mahimo usab nimong i-install ug i-import ang mga librarya sa ikatulo nga partido (sama sa mga open-source nga librarya nga gi-download gikan sa Internet) ngadto sa Arduino IDE. Mahimo ka pa nga maghimo mga librarya ug i-import kini sa Arduino IDE. Ang pagkaanaa sa librarya nagtabang sa mga tiggamit sa paglaktaw sa labi ka espesyal nga sulud sama sa mga rehistro ug mga pointer sa address, nga labi nga nakunhuran ang kalisud sa pag-uswag. Kung kinahanglan nimo mahibal-an kung giunsa pagdugang ang mga librarya sa ikatulo nga partido alang sa pag-install sa ARDUINO IDE, palihug tan-awa ang adres ug pamaagi sa pag-install sa drayber: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development Mahimo usab nimo susihon ang among Github alang sa dugang nga kasayuran. https://github.com/elephantrobotics/myCobot
Mahimo usab nimo susihon ang among Github alang sa dugang nga kasayuran. https://github.com/elephantrobotics/myCobot
Ingon sa mosunod:
4.4 API Interface ug Komunikasyon
- UNIFLOW
- Arduino
- micro python
- FreeROTS
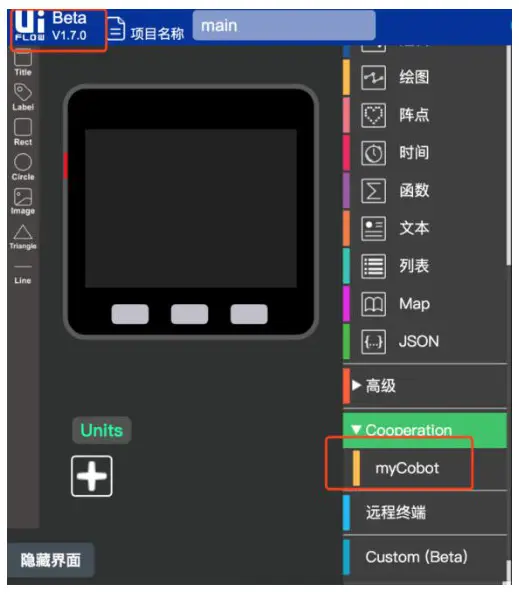
4.4.1 UIFlow
Paggamit UIFlow Beta Bersyon ug Pagpili Kooperasyon - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
Ang ROS ubos sa pag-uswag ug i-update sumala sa pag-uswag.
Sa 12.31:
- Gi-update ang ROS setup aron ang Python2 o 3 mahimo na nga ma-install.
- Usba aron mano-mano ang pagsulod sa serial port, aron ang mga tiggamit sa Windows makadagan direkta.
- I-update ang bag-ong Interface specification document sa API Library, palihug pangitaa ang “README”.
- 4.6 Joint Calibration
Kung ang imong mobot kinahanglan nga mag-calibrate sa mga lutahan, palihug gamita ang firmware sa mycobiota o Arduino ug uban pang mga himan aron masunog una ang Calibration.
Human ma-upload ang firmware, ang Basic interface gipakita sa ubos:
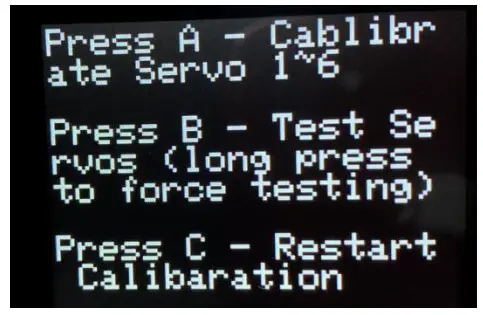
Niini nga panahon, i-rotate ang J1 ngadto sa standard nga zero nga posisyon nga nag-align sa groove, ug i-press ang A button (ang wala nga buton), unya ang J1 moadto gikan sa usa ka dinamikong paglihok ngadto sa usa ka static nga posisyon ug ma-fix niini nga standard zero nga posisyon.
Balika ang mga lakang nga nagsunod niini nga pamaagi aron ma-set up ang nahabilin nga J2-J6. Human mabutang ang J6, i-press ang A key(ang wala nga yawe) pag-usab aron ma-save ang tanang Settings.
Kung ang tanan nga mga lutahan nakabalik na sa standard zero nga posisyon, kinahanglan nimo nga susihon kung ang myCobot makaandar ba sa normal. Pindota ang B button (ang tunga nga buton), unya ang akong robot maka-detect sa J1 ngadto sa J6 sa han-ay.
Palihog siguroha nga walay mga babag o interference sa personnel sulod sa operating range aron malikayan ang kadaot sa mga ekipo ug personnel atol sa testing.
Visual Programming ug Industrial Software
5.1 Visual Programming Software-UIFlow
Para sa detalyadong paggamit, palihog kuhaa ang UI Flow operation manual gikan sa link sa ubos.
M5STACK Basic: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK Atom: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Industrial Visualization Programming Software-RoboFlow
Gisuportahan sa myCobot ang RoboFlow nga naglihok sa Elephant Robotics nga mga robot nga kolaborasyon sa industriya. Ang proseso sa operasyon sa RoboFlow yano ug dali gamiton, ug ang interactive nga interface tin-aw ug dali sabton, nga kombenyente alang sa mga tiggamit nga dali nga ma-master ug magamit, ug epektibo nga makatabang sa mga tiggamit nga makompleto ang mga operasyon ug mga buluhaton sa pagprograma nga episyente. Bisan ang mga bag-ong tiggamit mahimo usab nga makab-ot ang mga target nga gimbuhaton pinaagi sa yano nga mga operasyon.
Para sa detalyadong paggamit, palihog kuhaa ang RoboFlow operation manual gikan sa link sa ubos.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
After-sales nga Serbisyo
- Ang serbisyo sa pagbalik limitado sa mga butang nga wala maablihan sa sulod sa 7 ka adlaw pagkahuman sa petsa sa pagkadawat sa logistik sa mga produkto. Ang kargamento o uban pang mga peligro nga naa sa pagbalik kinahanglan nga pas-anon sa kustomer.
- Kinahanglang ihatag sa mga kustomer ang invoice sa pagpalit ug warranty card isip sertipikasyon sa warranty kung gipangayo ang warranty.
- Ang Elephant Robotics ang mahimong responsable sa mga sayup sa hardware sa mga produkto tungod sa normal nga paggamit sa panahon sa warranty.
- Ang panahon sa warranty magsugod gikan sa petsa sa pagpalit o sa petsa sa pagkadawat sa logistics.
- Ang mga sayup nga mga bahin gikan sa mga produkto mapanag-iya sa Elephant Robotics, ug ang angay nga gasto ibayad kung kinahanglan.
Kung kinahanglan nimo nga mag-aplay alang sa serbisyo sa garantiya, palihug kontaka una ang among serbisyo sa kostumer aron makumpirma ang detalyado nga kasayuran. Ang mosunud mao ang mga termino sa warranty sa mga detalyado nga sangkap:
Mubo nga sulat: Kung adunay panagsumpaki sa Product Brochure, ang User Manual ang mopatigbabaw.
a) Sever nga motor
| Panahon sa Warranty | Mga Serbisyo sa Garantiya |
| ≤1 ka bulan | Ang Elephant Robotics nagtanyag usa ka libre nga bag-ong sever motor ug nagdala sa kargamento. |
| 1-3 ka bulan | Ang Elephant Robotics nagtanyag usa ka libre nga bag-ong sever motor, ang kostumbre ang magdala sa kargamento |
| ≥3 ka bulan | Ang mga kustomer kinahanglan nga mopalit niini sa ilang kaugalingon. |
b)Mga Bahin sa Elektrisidad(M5 Hardware)
| Panahon sa Warranty | Mga Serbisyo sa Garantiya |
| ≤3 ka bulan | Kinahanglang ibalik kini sa mga kustomer pagkahuman sa pag-disassembly, ang Elephant Robotics magpadala ug bag-o nga libre ug magdala sa kargamento sa gawas ug sa balay. |
| 3-6 ka bulan | Ang mga kustomer kinahanglan nga ipadala kini pagbalik pagkahuman sa pag-disassembly ug dad-on ang kargamento sa gawas ug balay, Ang Elephant Robotics magpadala ug bag-o nga libre. |
| ≥6 ka bulan | Ang mga kustomer kinahanglan nga mopalit niini sa ilang kaugalingon. |
c)Mga Bahin sa Istruktura, lakip ang mga Bahin sa Shell
| Panahon sa Warranty | Mga Serbisyo sa Garantiya |
| ≤1 ka tuig | Ang Elephant Robotics nagtanyag libre nga bag-ong mga sangkap sa makausa, ang kostumbre ang magdala sa kargamento. |
| ≥1 ka tuig | Ang mga kustomer kinahanglan nga mopalit niini sa ilang kaugalingon. |
Sa panahon sa warranty sa gihatag nga produkto, ang kompanya nag-ayo lamang sa mga malfunction nga nahitabo sa normal nga paggamit sa robot nga libre. Bisan pa, sa mosunod nga mga kaso, ang kustomer masingil alang sa pag-ayo (bisan sa panahon sa warranty):
- Ang kadaot o malfunction tungod sa sayop nga paggamit ug dili husto nga paggamit lahi sa manwal.
- Ang pagkapakyas tungod sa dili awtorisado nga pag-disassembly sa kustomer.
- Ang kadaot tungod sa dili husto nga pag-adjust o dili awtorisado nga pag-ayo.
- Ang kadaot tungod sa natural nga mga katalagman sama sa linog ug baha.
palihug hugot nga sundon ang mga instruksyon niini nga manwal ug may kalabutan nga manwal sa pagpaandar sa robot.
Q&A:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
P: Dili makit-an sa compiler ang katugbang nga aparato?
A: Ang himan mahimong maugmad lamang human sa pag-set up sa development environment ug pag-instalar sa katugbang nga librarya sa proyekto.
P: Dili ma-compile sa compiler ang sample program sa hustong paagi sa pagpangita sa katugbang nga device?
A: Ang gikinahanglan nga librarya sa proyekto wala ma-install o adunay panagsumpaki sa librarya sa proyekto. Palihug susiha nga ang librarya sa proyekto na-install una sa husto. Kung husto ang pagka-install ug dili gihapon maka-compile, palihug i-install pag-usab ang palibot sa pagpalambo sa Arduino.
Q: Ang Device napakyas sa paglihok sa husto nga paagi human sa pagsunog sa firmware ngadto sa ATOM?
A: Ang firmware alang sa terminal sa ATOM kinahanglan nga mogamit sa among firmware sa pabrika. Kung adunay lain nga firmware nga aksidenteng nasunog, mahimo nimong pilion ang "myCobot ATOM ATOMMAIN aron masunog ang terminal sa ATOM.
P: Adunay gamay nga pag-uyog sa bertikal nga posisyon apan wala sa kahimtang sa paglihok?
A: Palihug susiha kung ang akong robot naa sa bertikal nga kahimtang. mycobiota dili apektado sa grabidad sa usa ka bertikal nga kahimtang, mekanikal nga voidage mahimong hinungdan sa ginagmay nga pag-uyog. Apan wala’y mga pag-uyog kung wala na kini sa bertikal nga kahimtang. Ang girekomendar nga tulin mao ang 400-500 sa usa ka bertikal nga kahimtang.
P: Ma-charge ba unya ang ROS system?
A: Ang ROS bukas nga tinubdan ug ma-update sa among Github. Walay bayad alang sa pag-upgrade sa firmware.
Kontaka Kami
Kung adunay ka kinahanglan alang sa tabang, palihug kontaka kami nga gipakita ingon sa mosunod.
Ang Shenzhen Elephant Robotics Technology Co., Ltd
Address: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, China
Email: support@elephantrobotics.com
Telepono: +86(0755)-8696-8565 (adlaw sa pagtrabaho 9:30-18:30)
Website: www.elephantrobotics.com
Twitter: CobotMy

Mga Dokumento / Mga Kapanguhaan
 |
Elephant Robotics MyCobot Six-Axis Collaborative Robot Arm [pdf] Manwal sa Gumagamit MyCobot, Six-Axis Collaborative Robot Arm, MyCobot Six-Axis Collaborative Robot Arm, V20210309 |



