![]() Notendahandbók
Notendahandbók![]()

Höfundarréttaryfirlýsing
Engin eining eða einstaklingur má draga út, taka saman, þýða eða endurskapa neitt innihald þessarar handbókar (td: tækniskjöl, hugbúnaður o.s.frv.), né dreifa í neinu formi (þar á meðal efni og útgáfur) án skriflegs leyfis Shenzhen Elephant Robotics Technology Co. ., Ltd. (hér eftir nefnt „Elephant Robotics“).
Að auki eru vöruupplýsingarnar og tengdar heimildir sem getið er um í þessari handbók eingöngu til viðmiðunar og innihaldið getur breyst án fyrirvara.
Nema það sem sérstaklega er tekið fram í þessari handbók, ætti ekkert í þessari handbók að túlka sem neina ábyrgð eða ábyrgð af hálfu Elephant Robotics á persónulegu tapi, skemmdum á eignum eða hæfni í ákveðnum tilgangi. Allur réttur áskilinn!
|
Útgáfa |
Lýsing |
Athugið |
| V 2020.12.31 | Bætt við mynd af myCobot【staðalsetti】, grunnsamsetningu og lokasamsetningu | |
| V 2021.02.04 | Bætt við mynd af hnitakerfi, MyStudio hugbúnaði |
Yfirview
Um handbókina
Velkomið að nota MyCobot samstarfsvélmenni og þakka þér fyrir kaupin.
Þessi handbók lýsir varúðarráðstöfunum fyrir rétta uppsetningu og notkun MyCobot. Vinsamlegast lestu þessa handbók og aðrar tengdar handbækur vandlega áður en þú setur þetta vélmennakerfi upp. Eftir lestur, vinsamlegast geymdu það á öruggum stað svo þú getir nálgast það hvenær sem er. Að lesa hluti handbókarinnar
Þessi handbók er miðuð við:
- uppsetningarforrit.
- Aflúsara.
- Viðhaldsfólk.
 |
Þeir sem setja upp/kemba/viðhalda MyCobot samstarfsvélmennið verða að vera þjálfaðir í Elephant Robotics og hafa þá vélrænu og rafrænu þekkingu sem þarf til ofangreindra starfa. |
Hvernig á að nota
Þessa handbók ætti að nota þegar eftirfarandi verk eru framkvæmd:
- Uppsetningarvinna: Færðu vélmennið í vinnustöðu og festu það við grunninn samkvæmt uppsetningarleiðbeiningunum.
- Villuleit: Kembi vélmenni í vinnustöðu.
- Viðhaldsvinna: reglulegt viðhald vélmennakerfis til að tryggja eðlilega virkni þess. Þegar vélmenni bilar vegna umhverfisáhrifa eða óviðeigandi notkunar notanda, eða ákveðinn hluti vélmennakerfisins fer yfir eðlilegan endingartíma, þarf að gera við vélmennið.
Athugið:
- Þessi handbók á við um alþjóðlega notendur, sem og notendur í Hong Kong, Macao og Taívan.
- Þessi handbók er ekki uppfærð reglulega. Uppfærða dagsetningin er útgáfunúmerið. Notendur geta hlaðið niður nýjustu útgáfunni frá opinbera websíðu Elephant Robot hvenær sem er.
Öryggi
Þessi kafli lýsir almennum öryggisupplýsingum fyrir fólk sem framkvæmir uppsetningu, viðhald og viðgerðir á vélmennum. Vinsamlegast lestu og skildu innihald og varúðarráðstafanir þessa kafla áður en þú meðhöndlar hann, setur hann upp og notar hann.
1.1 Hættugreining
Öryggi samstarfsvélmennisins byggist á forsendu réttrar uppsetningar og notkunar vélmennisins, og jafnvel þó að farið sé að öllum öryggisleiðbeiningum, geta meiðsli eða skemmdir af völdum rekstraraðila samt átt sér stað. Þess vegna er mjög mikilvægt að skilja öryggishættuna af notkun vélmenna, sem er gagnlegt til að koma í veg fyrir vandamál áður en þau koma upp.
Töflur 1-2~4 hér að neðan eru algengar öryggishættur sem kunna að vera fyrir hendi í tengslum við notkun vélmenna:
Tafla 1- 2 Hættulegar öryggishættur
 |
|
| 1 | Manntjón eða skemmdir á vélmenni af völdum rangrar notkunar við meðhöndlun vélmenna. |
| 2 | Manntjón eða skemmdir á vélmenni verða vegna þess að vélmennið er ekki fest eins og krafist er, tdample, skrúfan er ekki skrúfuð eða hert og grunnurinn er ekki nóg til að styðja vélmennið stöðugt fyrir háhraða hreyfingu, sem veldur því að vélmenni velti niður. |
| 3 | Misbrestur á að framkvæma rétta öryggisstillingu vélmennisins, eða uppsetning öryggisvarnarverkfæra o.s.frv., getur valdið því að öryggisaðgerð vélmennisins mistekst. |
Tafla 1- 3 Öryggisáhætta á viðvörunarstigi
 |
|
| 1 | Leiktu þér við vélmennið, þú gætir orðið fyrir hlaupandi vélmenni eða lent í hindrun eins og snúru til að valda persónulegum meiðslum. |
| 2 | Óviðkomandi starfsfólk breytir öryggisstillingarbreytum, sem veldur því að öryggisaðgerðin bilar eða er hætta búin. |
| 3 | Rispur og stungur stafa af beittum yfirborði eins og öðrum tækjum í vinnuumhverfinu eða vélmenni. |
| 4 | Vélmennið er nákvæmnisvél og pedali getur valdið skemmdum á vélmenni. |
|
5 |
Ef clamp er ekki á sínum stað eða áður en slökkt er á aflgjafa vélmennisins eða slökkt er á gasgjafanum (ekki er ákvarðað hvort endaáhrifin haldi hlutnum þétt án þess að detta af vegna aflmissis). Ef clamphlutur er ekki fjarlægður, hann getur valdið hættu, svo sem að fólk slasist við árekstur. |
| 6 | Hætta er á að vélmenni hreyfist fyrir slysni. Undir engum kringumstæðum ættir þú að standa undir neinum ás vélmennisins! |
| 7 | Vélmenni er nákvæmnisvél. Ef það er ekki komið fyrir slétt við meðhöndlun getur það valdið titringi og valdið skemmdum á innri íhlutum vélmennisins. |
Tafla 1- 4 Hugsanleg öryggishætta sem getur valdið raflosti
 |
|
| 1 | Notkun óupprunalegrar snúru getur valdið óþekktri hættu. |
| 2 | Snerting rafbúnaðar við vökva getur valdið hættu á rafmagnsleka. |
| 3 | Það getur verið hætta á raflosti þegar raftengingin er röng. |
| 4 | Vertu viss um að sinna endurnýjunarvinnu eftir að slökkt hefur verið á straumnum á stjórnandann og tengdan búnað og tekin úr sambandi við rafmagnssnúruna. Ef verkið er framkvæmt á meðan rafmagn er á getur það valdið raflosti eða bilun. |
1.2 Öryggisráðstafanir
Fylgja skal eftirfarandi öryggisreglum þegar vélmennið mitt er notað:
- mycobiota er rafbúnaður. Tæknimenn sem ekki eru fagmenn geta ekki breytt vírnum, annars er það viðkvæmt fyrir að slasa tækið eða manneskjuna.
- HÆTTA, VIÐVÖRUN merkin í þessari handbók eru aðeins viðbót við öryggisráðstafanir.
- Vinsamlegast notaðu mycobiota í sérstöku umhverfissviði. Ef ekki, mun það stytta endingartíma vörunnar ef farið er yfir forskriftir og hleðsluskilyrði, jafnvel skemma búnaðinn.
- Áður en mycobiota er rekið og viðhaldið verður starfsfólkið sem ber ábyrgð á uppsetningu, rekstri og viðhaldi að vera þjálfað til að skilja hinar ýmsu öryggisráðstafanir og réttar aðferðir við notkun og viðhald.
- Ekki nota mycobiota í auglýsinguamp umhverfi í langan tíma til að forðast skemmdir, myCobot tilheyrir nákvæmum rafeindahlutum.
- Ekki nota mycobiota í umhverfi með háum hita. Ytra yfirborð mycobiota er úr ljósnæmu plastefni sem hráefni, hár hiti mun skemma skelina og leiða til bilunar.
- Mjög ætandi hreinsun hentar ekki til að hreinsa mycobiota. Anodized íhlutir eru ekki hentugur fyrir dýfingarþrif.
- Ekki nota vélmennið mitt án uppsetningargrunns til að forðast skemmdir á búnaðinum eða slys. myCobot ætti að nota í föstu og lítt áberandi umhverfi.
- Ekki nota aðra straumbreyta til að veita myCobot straum Ef það skemmist vegna notkunar á ósamræmdum millistykki verður það ekki innifalið í þjónustu eftir sölu.
- Vinsamlegast ekki taka í sundur eða skrúfa af skrúfunum og skel þeirra. Ef það er opnað er ekki hægt að veita ábyrgðarþjónustu.
- Fólk getur ekki gert við myCobot án fagmenntunar. Ef það er vandamál með vélmennið mitt, vinsamlegast hafðu samband við tækniþjónustumann myCobot tímanlega.
- Vinsamlega farið að viðeigandi lögum til að takast á við úrelda mycobiota og vernda umhverfið.
- EKKI láta börn leika sér með vélmennið mitt ein. Fylgjast þarf með öllum ferlum meðan þeir eru í gangi. Eftir að ferli er lokið, vinsamlegast slökktu á búnaðinum tafarlaust.
- Það er bannað að breyta eða fjarlægja nafnplötur, leiðbeiningar, tákn og merki á vélfæraarminum og tengdum búnaði.
- Ekki brenna aðra vörurekla á flugstöðina Atom. Ef tækið skemmist af þeim sökum er það ekki innifalið í eftirsöluþjónustu.
Vinsamlegast ekki nota Chatbot samstarfsvélmennið í eftirfarandi tilgangi. - Læknisfræðileg og lífskrítísk forrit.
- Í umhverfi sem getur valdið sprengingu.
- Notað beint án áhættumats.
- Ófullnægjandi notkun öryggisaðgerðastiga.
- Ósamkvæm notkun á afköstum vélmenna.
Ef þú hefur einhverjar spurningar um þessa handbók vinsamlegast farðu á og sendu álit þitt á:https://www.elephantrobotics.cn.
1.3 Notkunarsviðsmyndir
Um mycobiota
2.1 Bakgrunnur
Elephant Robotics hélt uppi hlutverki „Njóttu vélmennaheimsins“ og hannaði og þróaði mycobiota, minnsta og léttasta samstarfsvélmenni heims, sem heldur flestum hlutverkum iðnaðarvélmenna. Með fyrirferðarlítilli og glæsilegri iðnhönnun, framúrskarandi og öflugri frammistöðu og risastóru hugbúnaðar- og vélbúnaðarþróunarrými, hefur myCobot ótakmarkaða möguleika á stækkun forrita.
Hönnunarfrumgerð mycobiota er frá Allt-í-einn vélmenni sem Elephant Robot hleypti af stokkunum í Kína árið 2018. Sem fyrsta samþætta samstarfsvélmennið í Kína hefur það unnið CAIMRS Industrial Robot Innovation Award 2019 og 2019 hátækni vélmenni árlega „Innovation Tæknideild“ og hefur einnig verið selt til meira en 30 landa heima og erlendis, hlotið einróma lof og viðurkenningu frá verksmiðjum 500 bestu fyrirtækja heims.
2.2 Inngangur
mycobiota er minnsta og léttasta sex-ása samvinnuvélmenni heims, framleitt í sameiningu af Elephant Robotics og M5Stack. Það er meira en framleiðnitæki fullt af ímyndunarafli, getur haldið áfram framhaldsþróuninni í samræmi við kröfur notenda til að ná sérsniðinni sérsniði.
Með 850g þyngd, 250g hleðslu og 350mm armlengd er myCobot fyrirferðarlítið en kraftmikið, ekki aðeins hægt að passa saman við margs konar endaáhrif til að laga sig að mismunandi notkunarsviðum og styðja einnig aukaþróun á fjölvettvangshugbúnaður til að mæta þörfum ýmissa atburðarása eins og vísindarannsókna og menntunar, snjallheimila, léttan iðnaðar og viðskiptaforrita.
myCobot – Grunnfæribreyta
| Frelsisgráða | 6 |
| Burðargeta | 250g |
| Handlegg | 350 mm |
| Vinnuradíus | 280 mm |
| Endurtekningarhæfni | ±0.5 mm |
| Þyngd | 850g |
| Power Input | 8V,5A |
| Vinnuástand | -5°~45° |
| Samskipti | USB Type-C |
2.3 Eiginleikar
- Einstök iðnaðarhönnun og einstaklega fyrirferðarlítil
mycobiota er samþætt mát hönnun og vegur aðeins 850g sem er mjög auðvelt að bera. Yfirbygging hennar er fyrirferðarlítil með færri varahlutum og hægt er að taka hana í sundur og skipta um hana á fljótlegan hátt til að átta sig á „plug and play“. - Há stilling og búin 2 skjám
myCobot inniheldur 6 afkastamikla servómótora með hröðum viðbrögðum, lítilli tregðu og sléttum
snúningur. Líkaminn ber 2 skjái sem styðja föstu bókasafnið til að sýna stækkað forritið
vettvangur auðveldari og skýrari. - Lego tengi og þúsundir M5STACK vistfræðilegra forrita
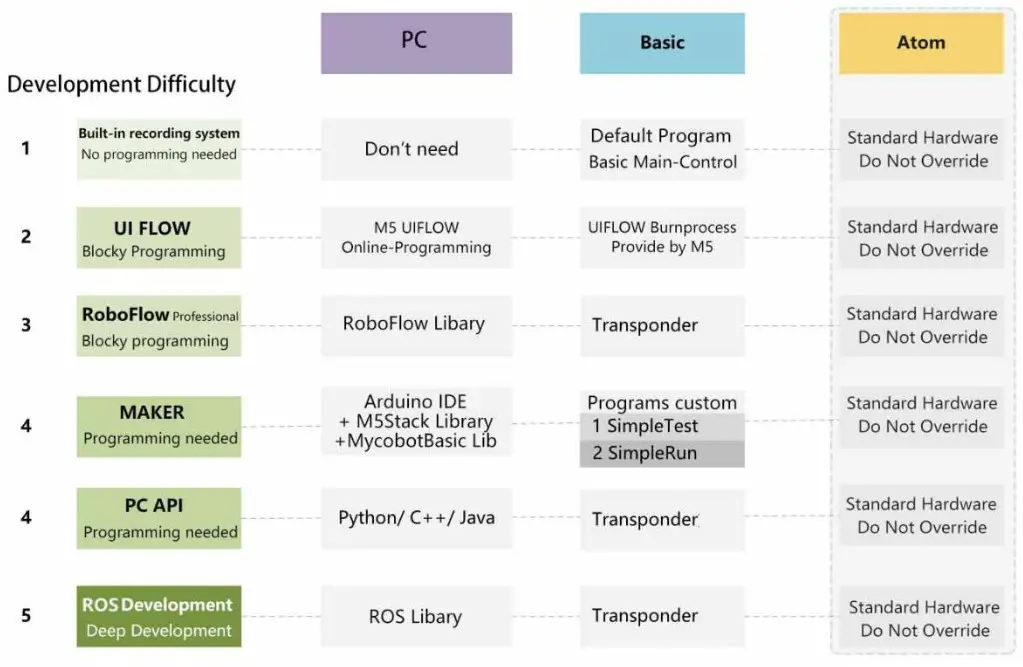
Grunnur og endi mycobiota eru með Lego tengi, sem hentar til þróunar á ýmsum litlum innbyggðum búnaði. Grunnurinn er stjórnað af M5STACK Basic og hægt er að nota þúsundir umsóknartilfella beint. - Blocky Forritun & Stuðningur Industrial ROS
Með því að nota UIFlow sjónforritunarhugbúnað er forritun vélmennisins mín einföld og auðveld fyrir alla.
Þú getur líka notað RoboFlow, hugbúnað iðnaðarvélmenna frá Elephant Robotics, sem styður margar hagnýtar einingar Arduino + ROS opinn uppspretta kerfi. - Lagaupptaka og læra í höndunum
Losaðu þig við hefðbundna punktasparnaðarhaminn, myCobot styður draga prufukennslu til að taka upp vistað lag og getur vistað allt að 60 mín mismunandi lög sem gerir það auðvelt og skemmtilegt fyrir nýja leikmenn að læra.
2.4 einkaleyfi
Tengd einkaleyfi um vélmennið mitt
|
Nei. |
Vottorð nr. | Einkaleyfisnafn | Einkaleyfi nr. |
Einkaleyfishafi |
| 1 | nr.8194138 | Vélræn armur og vélrænn armur | ZL 2018 20017484.4 | Elephant Robotics |
| 2 | nr.8186088 | Mekanískt armsamskeyti og vélrænn armur | ZL 2017 21700594.2 | Elephant Robotics |
| Nei. | Vara | Einkaleyfisgerð | Titill |
Einkaleyfi nr. |
| 1 | Léttur vélfæraarmur | Einkaleyfi á útliti | Sameiginlegur vélmennaarmur | 2020030683471.3 |
|
Nei. |
Uppfinningstitill |
Umsóknarnúmer |
| 1 | Aðferð og kerfi til að viðhalda, draga og kenna vélmenni | ZL 2018 1 1634649.3 |
| 2 | Árekstursgreiningaraðferð og kerfi vélmenna á netinu byggt á skriðþungalíkani | ZL 2019 1 0030748.9 |
| 3 | Eins konar vélmenni Dynamic Parameter Identification Method Óháð hornhröðun liðanna | ZL 2019 1 0773865.4 |
Vélbúnaður
3.1 Stjórnandi og stýrimaður
3.1.1 M5STACK Basic Main Controller
M5STACK BASIC Kit, eins og nafna hans, er byrjunarsett meðal M5STACK þróunarsetta röðarinnar.
Þetta er mát, staflað, stigstærð og flytjanlegt tæki sem er knúið ESP-32 kjarna, sem gerir það opinn uppspretta, litlum tilkostnaði, fullri virkni og auðvelt fyrir þróunaraðila að takast á við nýja vöruþróun á öllum símum.tages þar á meðal hringrásarhönnun, PCB hönnun, hugbúnað, móthönnun og framleiðslu. Þetta grunnsett býður upp á vinalegt verð og fullkomið úrræði sem gerir það að góðu byrjunarsetti fyrir þig til að kanna IoT.
Ef þú vilt kanna hraðvirkustu leiðina til IoT frumgerð er M5STACK þróunarborðið fullkomin lausn. Ekki eins og aðrir, M5STACK þróunarspjaldið er mjög skilvirkt, þakið iðnaðar-flokki og ESP32 byggt þróunarborð. Það samþættist Wi-Fi og Bluetooth einingum og inniheldur tvíkjarna og 16MB af SPI Flash. Ásamt 30+ M5Stack staflanlegum einingum, 40+ stækkanlegum einingum og mismunandi stigum forritunarmáls geturðu búið til og sannreynt IoT vöruna þína á mjög stuttum tíma.
Stuðningsþróunarvettvangar og forritunarmál: Arduino, Blocky tungumál með UIFlow, Micropython. Burtséð frá því á hvaða stigi forritunarkunnáttu þú ert, myndi M5STACK leiðbeina þér í hverju skrefi á leiðinni til að átta þig á hugmynd þinni sem og að lokaframleiðslunni. Ef þú hefur einhvern tíma spilað með ESP8266 myndirðu gera þér grein fyrir því að ESP32 er fullkomin uppfærsla úr ESP8266. Til samanburðar er ESP32 með fleiri GPIO, fleiri hliðræn inntak, tvö hliðræn útgang, mörg auka jaðartæki (eins og auka UART). Opinber þróunarvettvangur ESP-IDF hefur verið ígræddur með FreeRTOS. Með tvíkjarna og rauntíma stýrikerfi geturðu fengið skipulagðari kóða og miklu háhraða örgjörva.
M5STACK Basic samanstendur af tveimur aðskiljanlegum hlutum. Höfuðhlutinn er með alls kyns örgjörvum, flísum og nokkrum öðrum raufahlutum. M-BUS innstunga og útdraganlegir pinnar á báðum hliðum.
3.1.1.1 Eiginleikar vöru
- ESP32 byggt
- Innbyggður hátalari, hnappar, litaskjár, afl/endurstillingarhnappur
- TF kortarauf (16G hámarksstærð)
- Segulsog að aftan
- Útdraganlegir pinnar og holur
- M-Bus tengi og pinnar
- Forritsvettvangur: UIFlow, MicroPython, Arduino
3.1.1.2 Færibreytu
| Auðlindir | Parameter |
| ESP32-D0WDQ6 | 240MHz tvíkjarna, 600 DMIPS, 520KB SRAM, Wi-Fi, tvískiptur Bluetooth |
| Flash | 16MB |
| Power Input | 5V @ 500mA |
| Höfn | Tegund C x 1, GROVE(I2C+I/0+UART) x 1 |
| Kjarna botnhöfn | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS skjár | 2 tommu, 320×240 litríkur TFT LCD, ILI9342C,Brightness853nit |
| Ræðumaður | 1W-0928 |
| Hnappur | Sérsniðinn hnappur x 3 |
| Loftnet | 2.4G 3D loftnet |
| Rekstrarhitastig | 32°F til 104°F (0°C til 40°C) |
| Nettóþyngd | 47.2g |
| Heildarþyngd | 93g |
| Vörustærð | 54 x 54 x 18 mm |
| Pakkningastærð | 95 x 65 x 25 mm |
| Málsefni | Plast (PC) |
3.1.2 M5STACK Atóm
ATOM Matrix, sem hefur aðeins stærðina 24*24 mm, er fyrirferðarmeista þróunarborðið í M5Stack þróunarsettinu. Það gefur fleiri GPIO pinna og er mjög hentugur fyrir handhæga og smækkuð innbyggð tæki.
Aðalstýringin notar ESP32-PICO-D4 flísinn, sem er samþættur Wi-Fi og Bluetooth tækni og hefur 4MB af innbyggt SPI flassminni. Atom borðið býður upp á innrauða LED ásamt 5 * 5 RGB LED fylki á spjaldinu, innbyggðum IMU skynjara (MPU6886) og HY2.0 tengi. Almennur forritanlegur hnappur er fyrir neðan RGB Led fylkið til að gera notendum kleift að bæta inntaksstuðningi við ýmis verkefni sín. Innbyggt USB tengi (Type-C) gerir kleift að hlaða upp og keyra forrit hratt. Eitt M2 skrúfugat er aftan á til að festa borðið upp.
Athugið: Þegar vélbúnaðurinn er notaður, vinsamlegast forðastu að brenna fastbúnaðinn í ATOM í lok vélbúnaðarins. Tækið styður aðeins upprunalega fastbúnaðinn okkar.
Vinsamlega skilið óþægindin sem hafa komið fyrir þig.
3.1.2.1 Eiginleikar
- ESP32 PICO byggt
- Forritanlegur hnappur
- 5*5 RGB LED fylkisspjald (WS2812C)
- Innbyggð innrauð LED
- Innbyggður MPU6886 tregðuskynjari
- Útdraganlegir pinnar og holur
- Dagskrárvettvangur: Arduino UIFlow
3.1.2.2 Forskrift
| Auðlindir | Parameter |
| ESP32 | 240MHz tvíkjarna, 600 DMIPS, 520KB SRAM, Wi-Fi, tvískiptur Bluetooth |
| Flash | 4MB |
| Power Input | 5V @ 500mA |
| Höfn | Tegund C x 1, GROVE(I2C+I/0+UART) x 1 |
| PIN tengi | G19, G21, G22, G23, G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Innrauð sending |
| Hnappur | Sérsniðinn botn x 1 |
| Loftnet | 2.4G 3D loftnet |
| Rekstrarhitastig | 32°F til 104°F (0°C til 40°C) |
| Nettóþyngd | 3g |
| Heildarþyngd | 14g |
| Vörustærð | 24 x 24 x 14 mm |
| Pakkningastærð | 24 x 24 x 14 mm |
| Málsefni | Plast (PC) |
3.1.3 servó mótor
myCobot deilir 6 afkastamiklum servóservóum í 6 samskeytum með advantagMeð hröðum viðbrögðum, lítilli tregðu, sléttum snúningi, stöðugu togi osfrv.
| Auðlindir | Parameter |
| Stærð | 23.2*12.1*28.5mm |
| Rafmagnsinntak | 4.8~7.4V |
| Rekstrarhitastig | -15~70° |
| Metið tog | 1.5 kg.cm@6V |
| Stall tog | 4.5 kg.cm@6V |
| Snúningshorn | 300° (Hægt er að takmarka horn af hugbúnaði) |
3.2 Vélræn uppbygging
3.2.1 Stærð og vinnusvið
A)mycobiota
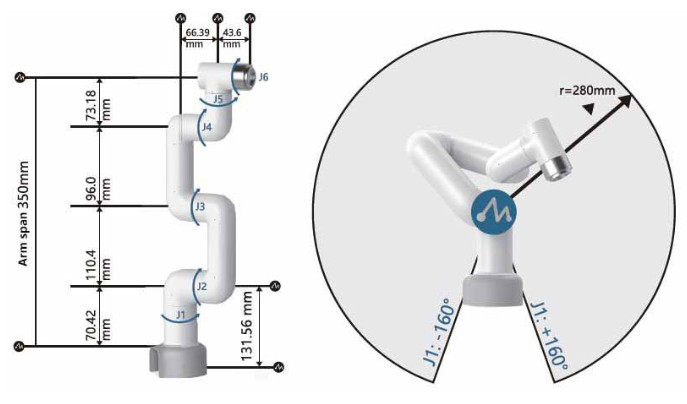
myCobot - Tafla yfir hreyfisvið liðanna
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
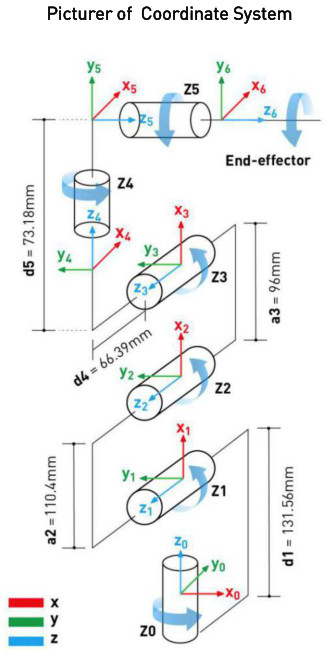
Mynd af hnitakerfi
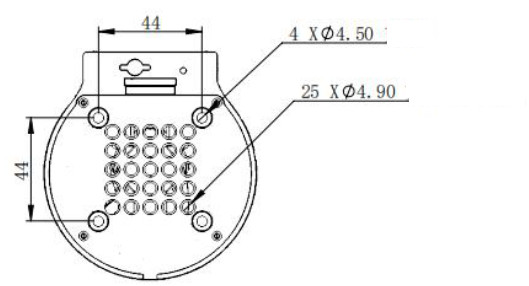
B) Grunnsamsetning
Grunnurinn er samhæfður við bæði Lego-tech íhlutaholum og skrúfugötum í gegnum gatið.
C) Lokaþingi
Endinn er samhæfur við bæði Lego-tech íhlutaholið og skrúfganginn.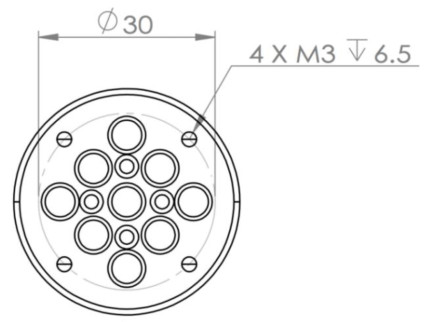
3.2.2 Upptaka og uppsetning
3.2.2.1 Upptaka
Athugið: Eftir að umbúðakassinn er kominn á sinn stað, vinsamlegast staðfestu að vélmennaumbúðirnar séu heilar og óskemmdar. Ef tjón er, vinsamlegast hafðu samband við flutningafyrirtækið og staðbundinn birgi í tíma. Eftir að hafa verið pakkað upp, vinsamlegast athugaðu raunverulega hluti í kassanum samkvæmt vörulistanum.

| myCobot【staðlað sett】 | -myCobot-280 -Bæklingur -Aflgjafi -USB-gerð C -Stökkvari -M4*35, skrúfa úr ryðfríu stáli -Sexhyrningur |
Vinsamlegast settu vélmennakerfið upp í umhverfi sem uppfyllir skilyrðin sem lýst er í töflunni til að beita og viðhalda afköstum vélarinnar og nota hana á öruggan hátt.
Starfsumhverfi og rekstrarskilyrði
| Hitastig | -10 ℃ ~ 45 ℃ |
| Hlutfallslegur raki | 20%~70% |
| Innanhúss/Utanhúss | Innandyra |
| Önnur umhverfiskrafa | -Forðastu sólarljós. -Geymið í burtu frá ryki, olíukenndum reyk, salti, járnslípum osfrv. -Geymið fjarri eldfimum og ætandi vökva og lofttegundum. -Ekki snerta vatn. -Sendir ekki högg, titring o.s.frv. - Haltu þig frá sterkum rafsegultruflunum. |
3.2.2.2 Uppsetning
Raunveruleg þyngd mycobiota samvinnuvélmennisins er 850g. Miðað við hreyfingu vélmennisins mun þyngdarpunkturinn hreyfast þegar vélmennið hreyfist. Þess vegna þarf að festa vélmennið á traustum grunni til að hægt sé að nota það venjulega.
Viðmótsstærð vélmennabotnsins: Festingargatið á stallinum er viðmótið sem festir vélmennið við aðrar undirstöður eða flugvélar. Sérstök holastærð er sýnd sem hér segir. Það eru 4 gegnumgöt með 4.5 mm þvermál, sem hægt er að festa með M4 boltum.
Gakktu úr skugga um að það sé samsvarandi snittari gat á fasta botninum áður en þú setur upp. Áður en þú setur upp formlega skaltu staðfesta:
- Umhverfið sem á að setja upp er í samræmi við kröfurnar hér að ofan.
- Uppsetningarstaðan er ekki minni en vinnusvið vélmennisins og það er nóg pláss
fyrir uppsetningu, notkun, viðhald og viðgerðir. - Settu standinn í rétta stöðu.
- Uppsetningartengd verkfæri eru tilbúin, svo sem skrúfur, skiptilyklar osfrv.
Eftir að hafa staðfest ofangreint skaltu færa vélmennið á festingarflöt grunnsins, stilla stöðu vélmennisins og stilla festingargat vélmennabotnsins við gatið á festingarflati grunnsins.
Athugið: Þegar þú stillir stöðu vélmennisins á festingarbotninum, vinsamlegast forðastu að ýta vélmenninu beint á festingarflöt grunnsins til að forðast rispur. Þegar vélmennið er fært handvirkt, vinsamlegast reyndu að forðast að beita utanaðkomandi krafti á veikan hluta vélmenna líkamans til að forðast óþarfa skemmdir á vélmenninu.
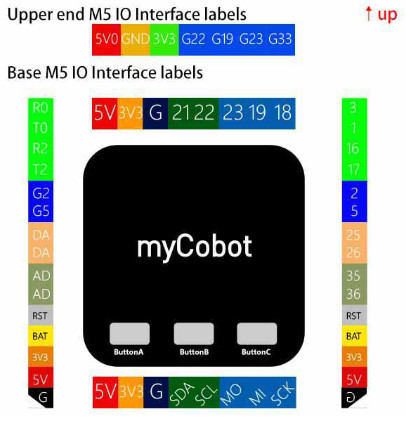
3.3 Rafeindatækni og rafmagn
myCobot hefur þrjár ytri útstöðvar. Þetta eru ytri tengi M5Stack Basic á grunninum, Grove skautarnir tveir nálægt rafmagnsinnstungunni og ytri tengipinnar á M5Stack Atom J6 samskeyti.
a)M5STACK grunn rafmagnsmynd

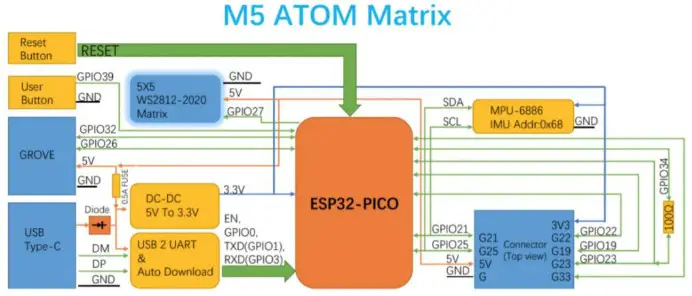
b)M5STACK Atom hringrás skýringarmynd
c)IO tengimyndrit
Hugbúnaður
Fyrir hugbúnaðaruppfærslur, vinsamlegast skoðaðu Github okkar fyrst. https://github.com/elephantrobotics/myCobot
4.1 Fastbúnaðaruppfærsla og endurheimt – vinnustofan mín
vinnustofan mín er einn stöðva vettvangur fyrir vélmenni vélmennisins/mycobiota minnar.
Helstu aðgerðir vinnustofu minnar eru: 1) Uppfæra fastbúnaðinn; 2) Gefðu kennslumyndbönd um hvernig á að nota vélmennið; 3) Gefðu upplýsingar um viðhald og viðgerðir (svo sem kennslumyndbönd, spurningar og svör, osfrv.).
Tengillinn á YouTube myndbönd um myStudio er: https://youtu.be/Kr9i62ZPf4w
Ef þú þarft að uppfæra eða viðhalda mycobiota þinni skaltu ganga úr skugga um að þróunarumhverfið sé sett upp. Ef ekki, vinsamlegast settu fyrst upp serial port driverinn og reyndu síðan að nota hugbúnaðinn. Niðurhalstengillinn er sem hér segir:
Opinber websíða: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Ef þú notar Windows kerfi, vinsamlega veldu „my studio-windows.exe“ til að hlaða niður og pakkaðu því síðan niður í verkefnamöppuna þína. Gættu þess að nota það ekki með flóknum slóðum, sem getur leitt til vandamála með óþekktar slóðir.
Ef þróunarumhverfið þitt er þegar sett upp geturðu opnað beint file „myCobot. exe".
Eftir opnun er viðmótið sem hér segir: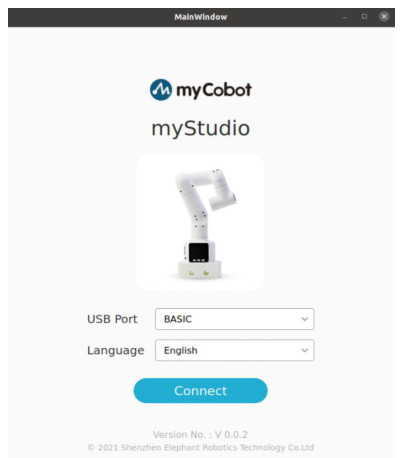
Tengdu myCobot þinn við „Basic“ eða „Atom“, veldu „tungumál“ og smelltu síðan á „Connect“ til að fara inn í aðalviðmótið sem er sýnt hér að neðan: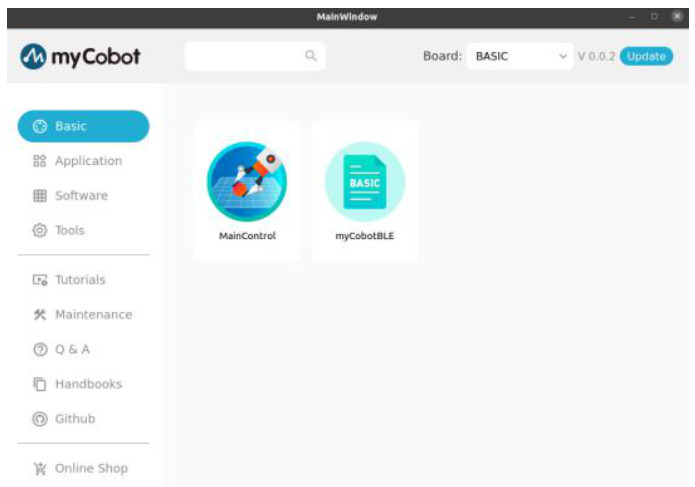
Ef þú tengir bæði Basic og Atom skaltu velja hugbúnaðinn sem þú vilt brenna aftur á borðstikunni í efra hægra horninu og smelltu síðan á Basic eða Tools til að velja fastbúnaðinn sem þú vilt brenna.
4.2 Innbyggð lagaupptaka
M5STACK Basic aðalstjórnborðið hefur 3 hnappa sem styðja sérsniðna forritun og gagnaritun. Þetta forrit er opinn uppspretta, þú getur athugað GitHub okkar.
Dragðu kennslusýningu
- Upptaka: Eftir að hafa farið í upptökuham skaltu velja geymslustað upptökunnar

Hnappur A: Geymdu í Ram
Hnappur B: Geymdu á minniskorti
Hnappur C: Farið úr upptökuham - Byrjaðu upptöku

Eftir að hafa valið geymslustað, dragðu vélfærahandlegginn handvirkt til að ljúka markaðgerðinni, þá verður aðgerðin skráð og geymd. - Spila

Hnappur A: Byrjaðu að spila upptekna aðgerð
Hnappur B: Hlé
Hnappur C: Hætta í spilun
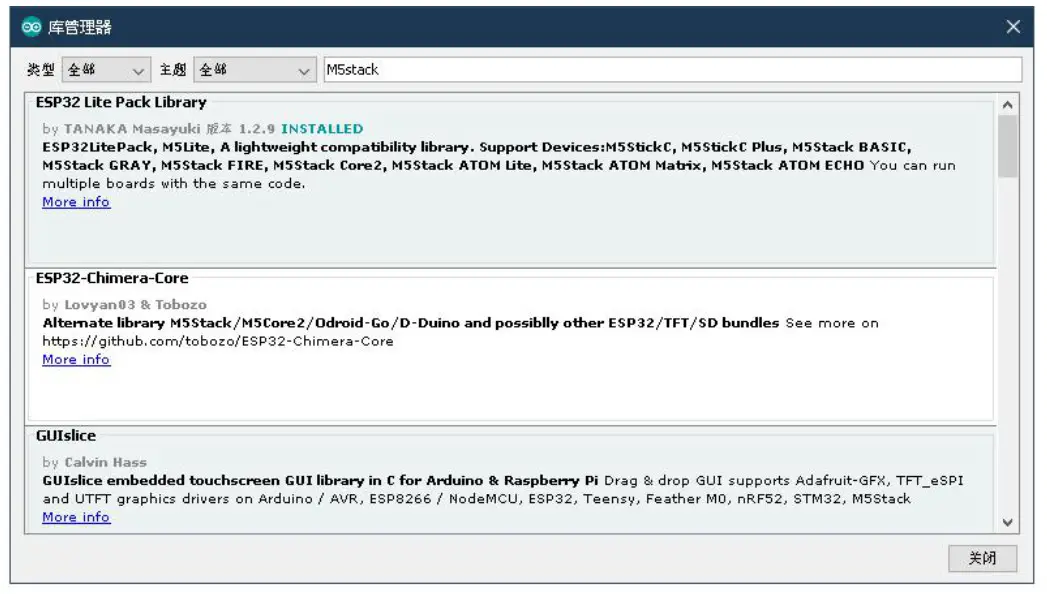
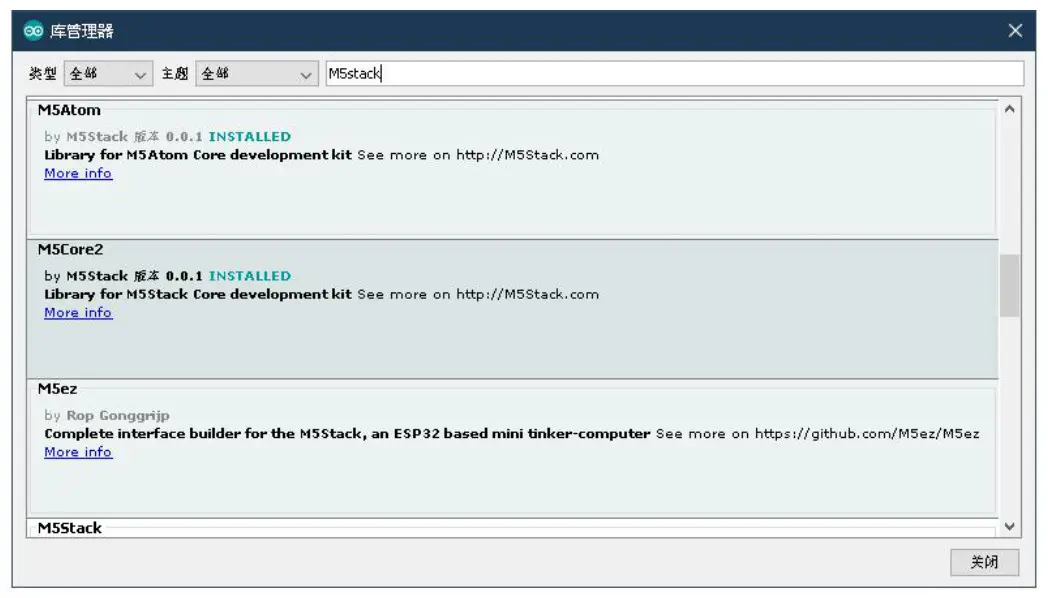
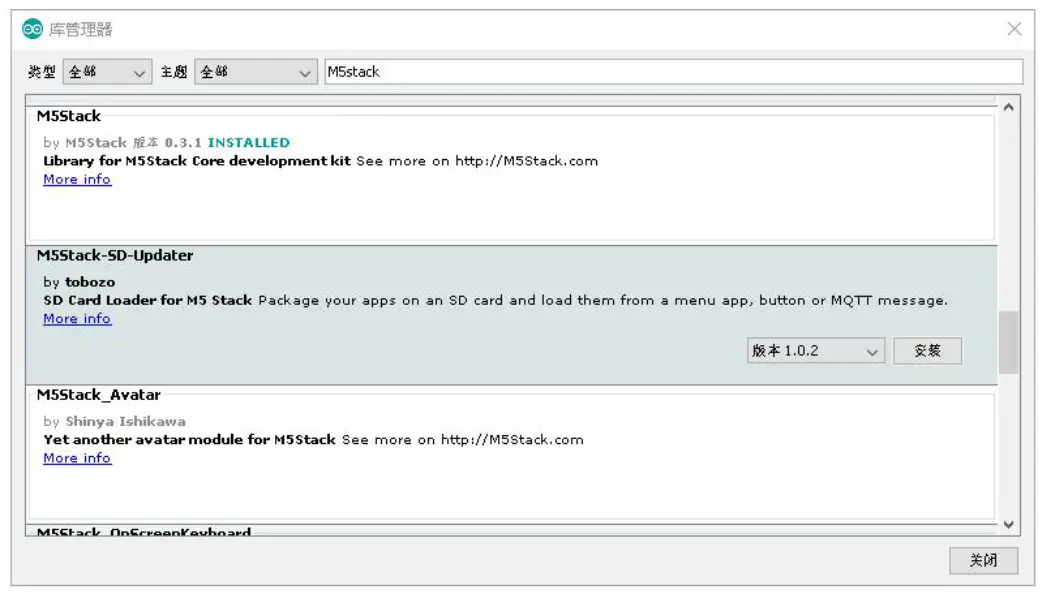
4.3 Arduino bókasöfn
Bókasafn er safn kóða sem gerir þér kleift að tengja auðveldlega og nota skynjara, skjái, einingar o.s.frv.ampLe, innbyggt LiquidCrystal bókasafn getur áttað sig á auðveldum samskiptum við karakter LCD skjái.
Hægt er að stækka aðgerðir Arduino þróunarborðsins þegar bókasafnið er notað. Vegna bókasafnsins getum við auðveldlega áttað okkur á samvinnu Arduino og ytri vélbúnaðar eða gagnasamskipta. Arduino IDE er foruppsett með röð af stöðluðu bókasafni files. Á sama tíma geturðu líka sett upp og flutt inn þriðja aðila bókasöfn (eins og opinn uppspretta bókasöfn sem hlaðið er niður af internetinu) í Arduino IDE. Þú getur jafnvel búið til bókasöfn og flutt þau inn í Arduino IDE. Tilvist bókasafnsins hjálpar notendum að komast framhjá sérhæfðara efni eins og skrám og heimilisfangavísum, sem dregur verulega úr erfiðleikum við þróun. Ef þú þarft að vita hvernig á að bæta við þriðja aðila bókasöfnum fyrir uppsetningu á ARDUINO IDE, vinsamlegast skoðaðu heimilisfangið fyrir uppsetningu bílstjórans og aðferðina: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development Þú getur líka skoðað Github okkar fyrir frekari upplýsingar. https://github.com/elephantrobotics/myCobot
Þú getur líka skoðað Github okkar fyrir frekari upplýsingar. https://github.com/elephantrobotics/myCobot
Sem hér segir:
4.4 API tengi og samskipti
- UNIFLOW
- Arduino
- ör python
- FreeROTS
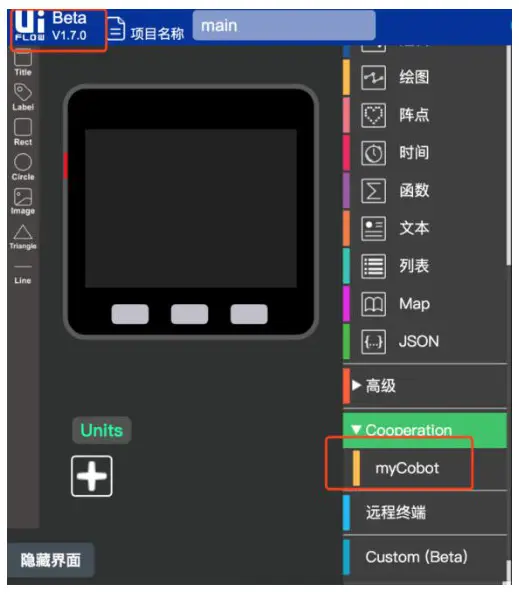
4.4.1 UIFlow
Notaðu UIFlow Beta útgáfu og veldu samvinnu - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS er í þróun og verður uppfært í samræmi við framvinduna.
Frá og með 12.31:
- Uppfærði ROS uppsetninguna svo annað hvort Python2 eða 3 geti nú sett upp.
- Breyttu til að slá inn raðtengi handvirkt í staðinn, svo Windows notendur geti keyrt beint.
- Uppfærðu nýja tengiforskriftarskjalið í API bókasafni, vinsamlegast flettu upp „README“.
- 4.6 Liðakvörðun
Ef móbotinn þinn þarf að kvarða liðamót, vinsamlegast notaðu fastbúnað mycobiota eða Arduino og önnur verkfæri til að brenna kvörðun fyrst.
Eftir að fastbúnaðinum hefur verið hlaðið upp er grunnviðmótið sýnt hér að neðan:
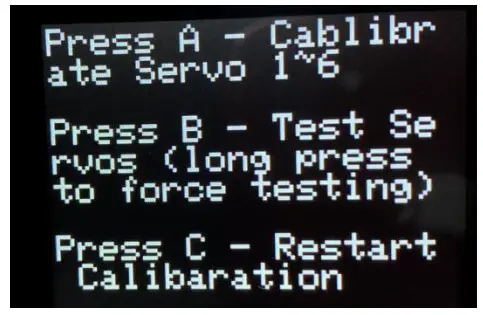
Á þessum tíma skaltu snúa J1 í staðlaða núllstöðu í takt við grópinn og ýta á A hnappinn (vinstri hnappinn), þá mun J1 fara úr kraftmikilli hreyfingu í kyrrstöðu og festast í þessa stöðluðu núllstöðu.
Endurtaktu skrefin eftir þessari aðferð til að setja upp J2-J6 sem eftir er. Eftir að J6 hefur verið stillt skaltu ýta aftur á A takkann (vinstri takkann) til að vista allar stillingar.
Þegar allir liðir eru komnir aftur í staðlaða núllstöðu þarftu líka að athuga hvort myCobot geti starfað eðlilega. Ýttu á B hnappinn (miðhnappinn), þá mun vélmennið mitt skynja J1 til J6 í röð.
Gakktu úr skugga um að engar hindranir eða truflanir séu á starfsmönnum innan vinnusviðsins til að koma í veg fyrir skemmdir á búnaði og starfsfólki meðan á prófun stendur.
Sjónræn forritun og iðnaðarhugbúnaður
5.1 Sjónræn forritunarhugbúnaður-UIFlow
Fyrir nákvæma notkun, vinsamlegast fáðu notendahandbók UI Flow frá hlekknum hér að neðan.
M5STACK Basic: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK atóm: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Industrial Visualization Forritun Hugbúnaður-RoboFlow
myCobot styður RoboFlow sem starfar af Elephant Robotics iðnaðarsamvinnuvélmennum. Rekstrarferlið RoboFlow er einfalt og auðvelt í notkun og gagnvirka viðmótið er skýrt og auðskiljanlegt, sem er þægilegt fyrir notendur að ná fljótt tökum á og nota, og hjálpar notendum að klára aðgerðir og forritunarverkefni á skilvirkan hátt. Jafnvel nýliði geta einnig náð markmiðsaðgerðum með einföldum aðgerðum.
Fyrir nákvæma notkun, vinsamlegast fáðu RoboFlow notkunarhandbókina á hlekknum hér að neðan.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Þjónusta eftir sölu
- Skilaþjónusta er takmörkuð við vörur sem ekki hafa verið opnaðar innan 7 daga frá móttökudegi vöruflutninga. Fragt eða önnur áhætta sem stofnast í staðinn ber viðskiptavinur.
- Viðskiptavinir ættu að leggja fram innkaupareikninginn og ábyrgðarskírteinið sem ábyrgðarvottorð þegar beðið er um ábyrgð.
- Elephant Robotics mun bera ábyrgð á vélbúnaðargöllum vara sem orsakast af venjulegri notkun á ábyrgðartímanum.
- Ábyrgðartímabilið hefst frá kaupdegi eða móttökudegi vöruflutninga.
- Galluðu hlutar vörunnar verða í eigu Elephant Robotics og viðeigandi kostnaður verður innheimtur ef þörf krefur.
Ef þú þarft að sækja um ábyrgðarþjónustu, vinsamlegast hafðu samband við þjónustuver okkar fyrst til að staðfesta nákvæmar upplýsingar. Eftirfarandi eru ábyrgðarskilmálar nákvæmra íhluta:
Athugið: Ef það er ágreiningur við vörubæklinginn skal notendahandbókin gilda.
a) Skilamótor
| Ábyrgðartímabil | Ábyrgðarþjónusta |
| ≤1 mánuður | Elephant Robotics býður upp á ókeypis nýjan ræsimótor og ber flutninginn. |
| 1-3 mánaða | Elephant Robotics býður upp á ókeypis nýjan ræsimótor, tollurinn ber flutninginn |
| ≥3 mánuðir | Viðskiptavinir þurfa að kaupa það sjálfir. |
b) Rafmagnshlutar(M5 vélbúnaður)
| Ábyrgðartímabil | Ábyrgðarþjónusta |
| ≤3 mánuðir | Viðskiptavinir þurfa að senda það til baka eftir að hafa verið tekið í sundur, Elephant Robotics mun senda nýjan ókeypis og bera vöruna út og heim. |
| 3-6 mánaða | Viðskiptavinir þurfa að senda það til baka eftir að hafa verið tekið í sundur og bera vöruna út og heim, Elephant Robotics mun senda nýjan ókeypis. |
| ≥6 mánuðir | Viðskiptavinir þurfa að kaupa það sjálfir. |
c) Byggingarhlutar, þar með talið skeljarhlutar
| Ábyrgðartímabil | Ábyrgðarþjónusta |
| ≤1 ár | Elephant Robotics býður upp á ókeypis nýja íhluti einu sinni, tollurinn skal bera vöruna. |
| ≥1 ár | Viðskiptavinir þurfa að kaupa það sjálfir. |
Á ábyrgðartíma afhentrar vöru gerir fyrirtækið eingöngu við þær bilanir sem verða við venjulega notkun vélmennisins ókeypis. Hins vegar, í eftirfarandi tilvikum, verður viðskiptavinurinn rukkaður fyrir viðgerðir (jafnvel á ábyrgðartímanum):
- Skemmdir eða bilanir af völdum rangrar notkunar og óviðeigandi notkunar sem er öðruvísi en í handbókinni.
- Bilun sem stafar af óleyfilegri sundurtöku af hálfu viðskiptavinar.
- Tjón af völdum rangrar stillingar eða óviðkomandi viðgerða.
- Tjón er af völdum náttúruhamfara eins og jarðskjálfta og flóða.
vinsamlegast fylgdu nákvæmlega leiðbeiningunum í þessari handbók og tengdri handbók til að stjórna vélmenninu.
Spurt og svarað:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
Sp.: Þýðandinn gat ekki fundið samsvarandi tæki?
A: Tækið er aðeins hægt að þróa eftir að þróunarumhverfið hefur verið sett upp og samsvarandi verkefnasafn hefur verið sett upp.
Sp.: Þýðandinn gat ekki sett saman sampLe program rétt til að finna samsvarandi tæki?
A: Nauðsynlegt verkasafn er ekki uppsett eða það er árekstur við verkefnasafnið. Athugaðu fyrst að verkefnasafnið sé rétt uppsett. Ef það er rétt sett upp og getur samt ekki safnað saman skaltu setja upp Arduino þróunarumhverfið aftur.
Sp.: Tækið virkaði ekki rétt eftir að vélbúnaðinn var brenndur í ATOM?
A: Fastbúnaðurinn fyrir ATOM flugstöðina þarf að nota vélbúnaðar frá verksmiðjunni okkar. Ef einhver annar fastbúnaður er óvart brenndur geturðu valið "myCobot ATOM ATOMMAIN til að brenna ATOM flugstöðina.
Sp.: Það er smá sveifla í lóðréttri stöðu en ekki í hreyfistöðu?
A: Vinsamlegast athugaðu hvort vélmennið mitt sé í lóðréttu ástandi. mycobiota hefur ekki áhrif á þyngdarafl í lóðréttu ástandi, vélrænt tómarúm getur valdið minniháttar sveiflum. En það verða engar sveiflur þegar það er út úr lóðréttu ástandi. Ráðlagður hraði er 400-500 í lóðréttu ástandi.
Sp.: Mun ROS kerfið gjalda seinna?
A: ROS er opinn uppspretta og verður uppfærður í Github okkar. Það er ekkert gjald fyrir uppfærslu á fastbúnaði.
Hafðu samband
Ef þú hefur einhverja þörf fyrir hjálp, vinsamlegast hafðu samband við okkur sýnt sem hér segir.
Shenzhen Elephant Robotics Technology Co., Ltd
Heimilisfang: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, Kína
Netfang: support@elephantrobotics.com
Sími: +86(0755)-8696-8565 (virkir dagar 9:30-18:30)
Websíða: www.elephantrobotics.com
Twitter: CobotMy

Skjöl / auðlindir
 |
Elephant Robotics MyCobot Six-Axis Collaborative Robot Arm [pdfNotendahandbók MyCobot, Six-Axis Collaborative Robot Arm, MyCobot Six-Axis Collaborative Robot Arm, V20210309 |



