![]() Mwongozo wa Mtumiaji
Mwongozo wa Mtumiaji![]()

Tamko la Hakimiliki
Hakuna kitengo au mtu binafsi anayeweza kutoa, kukusanya, kutafsiri au kutoa tena maudhui yoyote ya mwongozo huu (kwa mfano: nyaraka za kiufundi, programu, n.k.), wala kusambaza kwa njia yoyote (pamoja na nyenzo na machapisho) bila kibali cha maandishi cha Shenzhen Elephant Robotic Technology Co. ., Ltd. (hapa inajulikana kama "Roboti za Tembo").
Aidha, taarifa ya bidhaa na nyenzo zinazohusiana zilizotajwa katika mwongozo huu ni za marejeleo pekee na yaliyomo yanaweza kubadilika bila taarifa.
Isipokuwa kama ilivyoelezwa wazi katika mwongozo huu, hakuna chochote katika mwongozo huu kinachopaswa kufasiriwa kama dhamana au dhamana yoyote na Roboti ya Tembo ya hasara ya kibinafsi, uharibifu wa mali, au usawa kwa madhumuni fulani. Haki zote zimehifadhiwa!
|
Toleo |
Maelezo |
Kumbuka |
| V 2020.12.31 | Aliongeza mpiga picha wa myCobot【seti ya kawaida】, Bunge la Msingi, na Kumaliza Bunge | |
| V 2021.02.04 | Aliongeza mpiga picha wa Mfumo wa Kuratibu, Programu ya MyStudio |
Zaidiview
Kuhusu mwongozo
Karibu utumie roboti shirikishi ya MyCobot na asante kwa ununuzi wako.
Mwongozo huu unaelezea tahadhari za usakinishaji na matumizi sahihi ya MyCobot. Tafadhali soma mwongozo huu na miongozo mingine inayohusiana kwa uangalifu kabla ya kusakinisha mfumo huu wa roboti. Baada ya kusoma, tafadhali ihifadhi mahali salama ili uweze kuipata wakati wowote. Kusoma vitu vya mwongozo
Mwongozo huu umelenga kwa:
- kisakinishi.
- Kitatuzi.
- Wafanyakazi wa matengenezo.
 |
Wale wanaosakinisha/kutatua/kudumisha roboti shirikishi ya MyCobot lazima wafunzwe Roboti za Tembo na wawe na ujuzi wa kiufundi na kielektroniki unaohitajika kwa kazi iliyo hapo juu. |
Jinsi ya kutumia
Mwongozo huu unapaswa kutumika wakati wa kufanya kazi zifuatazo:
- Kazi ya ufungaji: Sogeza roboti kwenye nafasi ya kufanya kazi na urekebishe kwa msingi kulingana na maagizo ya ufungaji.
- Utatuzi: Kutatua roboti ili kufanya kazi.
- Kazi ya matengenezo: mfumo wa roboti wa matengenezo ya mara kwa mara ili kuhakikisha utendaji wake wa kawaida. Roboti inapofanya kazi vibaya kutokana na athari za mazingira au uendeshaji usiofaa wa mtumiaji, au sehemu fulani ya mfumo wa roboti inapozidi maisha ya kawaida ya huduma, roboti inahitaji kurekebishwa.
Kumbuka:
- Mwongozo huu unatumika kwa watumiaji wa kimataifa, pamoja na watumiaji katika Hong Kong, Macao na Taiwan.
- Mwongozo huu haujasasishwa mara kwa mara. Tarehe iliyosasishwa ni nambari ya toleo. Watumiaji wanaweza kupakua toleo la hivi karibuni kutoka kwa rasmi webtovuti ya Roboti ya Tembo wakati wowote.
Usalama
Sura hii inaelezea maelezo ya jumla ya usalama kwa watu wanaofanya usakinishaji, matengenezo na ukarabati wa roboti. Tafadhali soma na uelewe yaliyomo na tahadhari za sura hii kabla ya kuishughulikia, kuisakinisha na kuitumia.
1.1 Utambulisho wa Hatari
Usalama wa roboti shirikishi unategemea msingi wa usanidi na matumizi sahihi ya roboti, na hata maagizo yote ya usalama yakizingatiwa, jeraha au uharibifu unaosababishwa na opereta bado unaweza kutokea. Kwa hiyo, ni muhimu sana kuelewa hatari za usalama za matumizi ya roboti, ambayo ni ya manufaa ili kuzuia matatizo kabla ya kutokea.
Jedwali 1-2~4 hapa chini ni hatari za kawaida za usalama ambazo zinaweza kuwepo katika muktadha wa kutumia roboti:
Jedwali 1- 2 Hatari hatari za usalama
 |
|
| 1 | Jeraha la kibinafsi au uharibifu wa roboti unaosababishwa na operesheni isiyo sahihi wakati wa kushughulikia roboti. |
| 2 | Jeraha la kibinafsi au uharibifu wa roboti husababishwa kwa sababu roboti haijarekebishwa inavyotakiwa, kwa mfanoample, skrubu haijakaushwa au kukazwa, na msingi hautoshi kuhimili roboti kwa mwendo wa kasi, na kusababisha roboti kuinamia chini. |
| 3 | Kukosa kutekeleza usanidi ufaao wa utendakazi wa usalama wa roboti, au usakinishaji wa zana za ulinzi, n.k., kunaweza kusababisha utendakazi wa usalama wa roboti kushindwa kufanya kazi. |
Jedwali 1- 3 hatari za usalama za kiwango cha onyo
 |
|
| 1 | Cheza huku na kule na roboti, unaweza kugongwa na roboti inayokimbia, au kukwazwa na kizuizi kama vile kebo na kusababisha majeraha ya kibinafsi. |
| 2 | Wafanyakazi wasioidhinishwa hubadilisha vigezo vya usanidi wa usalama, na kusababisha kazi ya usalama kushindwa au hatari. |
| 3 | Mikwaruzo na michomo husababishwa na nyuso zenye ncha kali kama vile vifaa vingine vilivyo katika mazingira ya kazi au kidhibiti cha mwisho cha roboti. |
| 4 | Roboti ni mashine ya usahihi na kukanyaga kunaweza kusababisha uharibifu kwa roboti. |
|
5 |
Ikiwa clamp haipo au kabla ya ugavi wa umeme wa roboti kuzimwa au chanzo cha gesi kuzimwa (haijabainishwa ikiwa kidhibiti cha mwisho kinashikilia kitu bila kuanguka kwa sababu ya kupoteza nguvu). Ikiwa clamped kitu haijaondolewa, inaweza kusababisha hatari, kama vile watu kujeruhiwa kwa ajali. |
| 6 | Kuna hatari ya kusonga kwa bahati mbaya kwa roboti. Kwa hali yoyote unapaswa kusimama chini ya mhimili wowote wa roboti! |
| 7 | Roboti ni mashine ya usahihi. Ikiwa haitawekwa vizuri wakati wa kushughulikiwa, inaweza kusababisha mtetemo na inaweza kusababisha uharibifu wa vipengee vya ndani vya roboti. |
Jedwali 1- 4 Hatari zinazowezekana za usalama ambazo zinaweza kusababisha mshtuko wa umeme
 |
|
| 1 | Kutumia kebo isiyo ya asili kunaweza kusababisha hatari isiyojulikana. |
| 2 | Kugusa vimiminika kwa vifaa vya umeme kunaweza kusababisha hatari ya kuvuja kwa umeme. |
| 3 | Kunaweza kuwa na hatari ya mshtuko wa umeme wakati unganisho la umeme si sahihi. |
| 4 | Hakikisha kushughulikia kazi ya uingizwaji baada ya kuzima nguvu kwa kidhibiti na vifaa vinavyohusiana na kuchomoa kamba ya nguvu. Ikiwa kazi inafanywa wakati nguvu imewashwa, inaweza kusababisha mshtuko wa umeme au utendakazi. |
1.2 Tahadhari za Usalama
Sheria zifuatazo za usalama zinapaswa kufuatwa wakati wa kutumia roboti yangu:
- mycobiota ni kifaa cha umeme. Wataalamu wasio wa kitaalamu hawawezi kurekebisha waya, vinginevyo, ni hatari ya kuumiza kifaa au mtu.
- Alama za HATARI, ONYO katika mwongozo huu ni za ziada tu kwa tahadhari za usalama.
- Tafadhali tumia mycobiota katika mawanda mahususi ya mazingira. Ikiwa sio, kuzidi vipimo na hali ya mzigo itafupisha maisha ya huduma ya bidhaa hata kuharibu vifaa.
- Kabla ya kufanya kazi na kudumisha mycobiota, wafanyakazi wanaohusika na usakinishaji, uendeshaji, na matengenezo lazima wapate mafunzo ili kuelewa tahadhari mbalimbali za usalama na mbinu sahihi za uendeshaji na matengenezo.
- Usitumie mycobiota kwenye tangazoamp mazingira kwa muda mrefu ili kuepuka uharibifu, myCobot ni ya usahihi vipengele vya elektroniki.
- Usitumie mycobiota katika mazingira yenye joto la juu. Uso wa nje wa mycobiota umetengenezwa kwa resin ya picha kama malighafi, joto la juu litaharibu ganda na kusababisha kutofaulu.
- Usafishaji unaosababisha ulikaji sana haufai kusafisha mycobiota. Vipengele vya anodized havifai kwa kusafisha kuzamishwa.
- Usitumie roboti yangu bila msingi wa kupachika ili kuepuka uharibifu wa kifaa au ajali. myCobot inapaswa kutumika katika mazingira ya kudumu na ya unobtrusive.
- Usitumie adapta nyingine za nishati kusambaza nishati kwa myCobot Iwapo itaharibika kutokana na matumizi ya adapta isiyolingana, haitajumuishwa katika huduma ya baada ya mauzo.
- Tafadhali usitenganishe au kufungua skrubu na ganda lake. Ikiwa imefunguliwa, hakuna huduma ya udhamini inayoweza kutolewa.
- Watu hawawezi kutengeneza myCobot bila mafunzo ya kitaaluma. Iwapo kuna tatizo na roboti yangu, tafadhali wasiliana na mhandisi wa usaidizi wa kiufundi wa myCobot kwa wakati.
- Tafadhali zingatia sheria husika ili kukabiliana na mycobiota iliyoondolewa, na kulinda mazingira.
- USIWAruhusu watoto kucheza na roboti yangu pekee. Michakato yote inahitaji kufuatiliwa wakati unaendesha. Baada ya taratibu kukamilika, tafadhali zima kifaa mara moja.
- Ni marufuku kurekebisha au kuondoa vibao vya majina, maagizo, ikoni na alama kwenye mkono wa roboti na vifaa vinavyohusiana.
- Usichome viendeshaji vya bidhaa zingine kwenye terminal ya Atom. Ikiwa kifaa kimeharibiwa kwa sababu hiyo, haitajumuishwa katika huduma ya baada ya mauzo.
Tafadhali usitumie roboti shirikishi ya Chatbot kwa madhumuni yafuatayo. - Maombi ya matibabu na muhimu kwa maisha.
- Katika mazingira ambayo yanaweza kusababisha mlipuko.
- Inatumika moja kwa moja bila tathmini ya hatari.
- Upungufu wa matumizi ya viwango vya kazi vya usalama.
- Matumizi yasiyolingana ya vigezo vya utendaji wa roboti.
Ikiwa una maswali yoyote kuhusu mwongozo huu tafadhali tembelea na utume maoni yako kuhusu:https://www.elephantrobotics.cn.
1.3 Matukio ya matumizi
Kuhusu mycobiota
2.1 Usuli
Kushikilia dhamira ya “Furahia Ulimwengu wa Roboti”, Roboti za Tembo zilibuni na kuendeleza mycobiota, roboti ndogo na nyepesi zaidi duniani inayoshirikiana, inayobakiza utendaji mwingi wa roboti za viwandani. Kwa muundo thabiti na wa kifahari wa viwandani, utendakazi bora na wenye nguvu, na nafasi kubwa ya ukuzaji wa programu na maunzi, myCobot ina uwezekano usio na kikomo katika upanuzi wa programu.
Mfano wa muundo wa mycobiota unatoka kwa Roboti ya All-in-one iliyozinduliwa na Roboti ya Tembo nchini Uchina mnamo 2018. Kama roboti ya kwanza iliyojumuishwa nchini Uchina, imeshinda Tuzo ya Ubunifu wa Robot ya Viwanda ya 2019 na 2019 "Innovation ya Robot ya Juu". Wadi ya teknolojia”, na pia imeuzwa kwa zaidi ya nchi 30 ndani na nje ya nchi, ikipokea sifa na kutambuliwa kwa kauli moja kutoka kwa viwanda vya biashara 500 bora zaidi duniani.
2.2 Utangulizi
mycobiota ni roboti ndogo na nyepesi zaidi duniani ya mhimili sita, inayozalishwa kwa pamoja na Tembo Robotics na M5Stack. Ni zaidi ya zana ya tija iliyojaa mawazo, inaweza kuendeleza maendeleo ya pili kulingana na mahitaji ya watumiaji ili kufikia ubinafsishaji wa kibinafsi.
Ikiwa na uzito wa 850g, mzigo wa malipo wa 250g, na urefu wa mikono wa 350mm, myCobot ni compact lakini ina nguvu, haiwezi tu kulinganishwa na aina mbalimbali za athari ili kukabiliana na aina tofauti za matukio ya maombi pia kusaidia maendeleo ya pili ya programu ya majukwaa mengi ili kukidhi mahitaji ya hali mbalimbali kama vile utafiti wa kisayansi na elimu, nyumba mahiri, tasnia nyepesi na matumizi ya kibiashara.
myCobot - Kigezo cha Msingi
| Shahada ya Uhuru | 6 |
| Upakiaji | 250g |
| Muda wa mkono | 350 mm |
| Radi ya kufanya kazi | 280 mm |
| Kuweza kurudiwa | ± 0.5mm |
| Uzito | 850g |
| Ingizo la Nguvu | 8V,5A |
| Hali ya Kazi | -5°~45° |
| Mawasiliano | USB Type-C |
2.3 Vipengele
- Ubunifu wa Kipekee wa Viwanda & Inayoshikamana Sana
mycobiota ni muundo jumuishi wa msimu na uzani wa 850g pekee ambao ni rahisi sana kubeba. Muundo wake wa jumla wa mwili umeshikana na vipuri vichache na vinaweza kugawanywa kwa haraka na kubadilishwa ili kutambua kuziba na kucheza. - Usanidi wa hali ya juu & Inayo Skrini 2
myCobot ina motors 6 za utendaji wa juu za servo zenye majibu ya haraka, hali ndogo na laini.
mzunguko. Mwili hubeba skrini 2 za kuonyesha zinazotumia maktaba iliyofungwa ili kuonyesha programu iliyopanuliwa
tukio kwa urahisi na kwa uwazi zaidi. - Kiunganishi cha Lego & Maelfu ya Utumizi wa Kiikolojia wa M5STACK
Msingi na mwisho wa mycobiota una vifaa vya Lego Connector, ambayo inafaa kwa ajili ya maendeleo ya vifaa mbalimbali vya miniature iliyoingia. Msingi wake unadhibitiwa na M5STACK Basic, na maelfu ya kesi za maombi zinaweza kutumika moja kwa moja. - Blocky Programming & Supporting Viwanda ROS
Kwa kutumia programu ya UIFlow inayoonekana, kupanga roboti yangu ni rahisi na rahisi kwa kila mtu.
Unaweza pia kutumia RoboFlow, programu ya roboti za viwandani kutoka kwa Roboti za Tembo, inayosaidia moduli nyingi za kazi za Arduino + ROS mfumo wa chanzo huria. - Fuatilia Kurekodi na Ujifunze kwa mkono
Ondoa hali ya kawaida ya kuhifadhi pointi, myCobot inaauni ufundishaji wa majaribio ya kuburuta ili kurekodi wimbo uliohifadhiwa na inaweza kuhifadhi hadi 60mins Nyimbo tofauti na kuifanya iwe rahisi na ya kufurahisha kwa wachezaji wapya kujifunza.
Hati miliki 2.4
Hati miliki Zinazohusiana kuhusu roboti yangu
|
Hapana. |
Cheti Na. | Jina la Patent | Patent No. |
Patentee |
| 1 | Na.8194138 | Uunganisho wa mkono wa mitambo na mkono wa mitambo | ZL 2018 20017484.4 | Roboti za Tembo |
| 2 | Na.8186088 | Kiunganishi cha pamoja cha mkono wa mitambo na mkono wa mitambo | ZL 2017 21700594.2 | Roboti za Tembo |
| Hapana. | Bidhaa | Aina ya Patent | Kichwa |
Patent No. |
| 1 | Mkono wa roboti nyepesi | Hati miliki ya kuonekana | Mkono wa Robot wa Pamoja | 2020030683471.3 |
|
Hapana. |
Kichwa cha uvumbuzi |
Nambari ya Maombi |
| 1 | Mbinu na mfumo wa kudumisha mkao wa roboti, kuburuta na kufundisha | ZL 2018 1 1634649.3 |
| 2 | Mbinu ya kutambua roboti mtandaoni na mfumo kulingana na modeli ya kasi | ZL 2019 1 0030748.9 |
| 3 | Aina ya Mbinu ya Kitambulisho cha Kigezo chenye Nguvu cha Roboti Isiyo na Kasi ya Pamoja ya Angular | ZL 2019 1 0773865.4 |
Vifaa
3.1 Kidhibiti na Kiwezeshaji
3.1.1 M5STACK Mdhibiti Mkuu wa Msingi
M5STACK BASIC Kit, kama jina lake, ni vifaa vya kuanza kati ya safu ya vifaa vya ukuzaji vya M5STACK.
Ni kifaa cha kawaida, kinachoweza kubebeka, kinachoweza kubebeka na kinachobebeka ambacho kinaendeshwa na msingi wa ESP-32, ambayo huifanya kuwa chanzo huria, gharama ya chini, kufanya kazi kikamilifu, na rahisi kwa wasanidi programu kushughulikia utengenezaji wa bidhaa mpya katika nyanja zote.tagni pamoja na muundo wa mzunguko, muundo wa PCB, programu, muundo wa ukungu, na utengenezaji. Kitengo hiki cha Basic Kit kinatoa bei rafiki na nyenzo zilizoangaziwa kamili ambazo hufanya iwe zana nzuri ya kuanza kwako kugundua IoT.
Ikiwa unataka kuchunguza njia ya haraka zaidi ya protoksi ya IoT, bodi ya ukuzaji ya M5STACK ndio suluhisho bora. Sio kama wengine, bodi ya ukuzaji ya M5STACK ina ufanisi mkubwa, iliyofunikwa na kesi ya daraja la viwanda na bodi ya maendeleo ya ESP32. Inaunganishwa na moduli za Wi-Fi na Bluetooth na ina mbili-msingi na 16MB ya SPI Flash. Pamoja na moduli 30+ za M5Stack zinazoweza kupangwa, vitengo 40+ vinavyoweza kupanuliwa, na viwango tofauti vya lugha ya programu, unaweza kuunda na kuthibitisha bidhaa yako ya IoT kwa muda mfupi sana.
Majukwaa ya maendeleo ya usaidizi na lugha za programu: Arduino, lugha ya Blocky na UIFlow, Micropython. Bila kujali una kiwango gani cha ustadi wa kupanga, M5STACK itakuongoza katika kila hatua ya kufikia wazo lako na kufikia tija ya mwisho. Iwapo uliwahi kucheza na ESP8266, utagundua kuwa ESP32 ni uboreshaji bora kati ya ESP8266. Kwa kulinganisha, ESP32 ina GPIO nyingi zaidi, pembejeo zaidi za analogi, matokeo mawili ya analogi, viambajengo vingi vya ziada (kama UART ya ziada). Jukwaa rasmi la kukuza ESP-IDF limepandikizwa kwa FreeRTOS. Ukiwa na mifumo miwili ya uendeshaji na ya wakati halisi, unaweza kupata msimbo uliopangwa zaidi na kichakataji cha kasi ya juu.
Msingi wa M5STACK unajumuisha sehemu mbili zinazoweza kutenganishwa. Sehemu ya juu ina kila aina ya vichakataji, chipsi, na vifaa vingine vinavyopangwa. Soketi ya M-BASI, na pini zinazoweza kupanuliwa pande zote mbili.
3.1.1.1 Sifa za Bidhaa
- Msingi wa ESP32
- Spika, Vifungo, Rangi ya LCD, Kitufe cha Nguvu/Weka Upya
- Nafasi ya kadi ya TF (Ukubwa wa juu wa 16G)
- Uvutaji wa sumaku nyuma
- Pini na Mashimo Zinazoweza Kurefushwa
- Soketi na Pini za M-Bus
- Jukwaa la Programu: UIFlow, MicroPython, Arduino
3.1.1.2 Kigezo
| Rasilimali | Kigezo |
| ESP32-D0WDQ6 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, Bluetooth ya hali mbili |
| Mwako | 16MB |
| Ingizo la Nguvu | 5V @ 500mA |
| Bandari | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Bandari ya Chini ya Msingi | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| Skrini ya IPS | 2 inch, 320×240 TFT LCD ya Rangi, ILI9342C,Brightness853nit |
| Spika | 1W-0928 |
| Kitufe | Kitufe maalum x 3 |
| Antena | 2.4G Antena ya 3D |
| Joto la Uendeshaji | 32°F hadi 104°F (0°C hadi 40°C) |
| Uzito Net | 47.2g |
| Uzito wa jumla | 93g |
| Ukubwa wa Bidhaa | 54 x 54 x 18mm |
| Ukubwa wa Kifurushi | 95 x 65 x 25mm |
| Nyenzo za kesi | Plastiki (PC) |
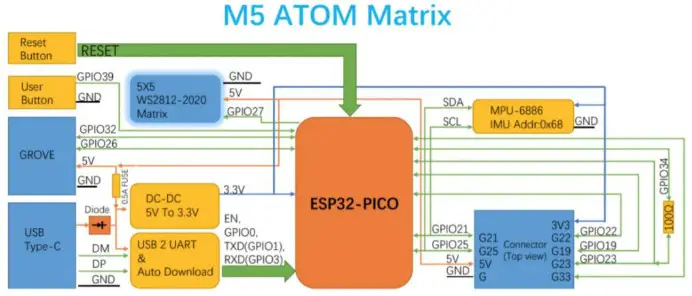
3.1.2 Atomu ya M5STACK
ATOM Matrix, ambayo ina ukubwa wa 24*24mm pekee, ndiyo bodi iliyoshikana zaidi ya ukuzaji katika mfululizo wa vifaa vya ukuzaji vya M5Stack. Inatoa pini zaidi za GPIO na inafaa sana kwa ukuzaji wa kifaa kilichopachikwa kwa urahisi na kidogo.
Udhibiti mkuu unachukua chip ya ESP32-PICO-D4, ambayo inakuja kuunganishwa na teknolojia ya Wi-Fi na Bluetooth na ina 4MB ya kumbukumbu jumuishi ya SPI flash. Ubao wa Atom hutoa LED ya Infra-Red pamoja na matrix ya LED ya 5 * 5 RGB kwenye paneli, kihisi cha IMU kilichojengewa ndani (MPU6886), na kiolesura cha HY2.0. Kitufe kinachoweza kupangwa kwa madhumuni ya jumla kinatolewa chini ya matrix ya Led ya RGB ili kuwawezesha watumiaji kuongeza usaidizi wa ingizo kwa miradi yao mbalimbali. Kiolesura cha USB cha ndani (Aina-C) huwezesha upakiaji na utekelezaji wa programu kwa haraka. Shimo moja la screw ya M2 hutolewa nyuma kwa kuweka ubao.
Kumbuka: Unapotumia kidanganyifu, tafadhali epuka kuchoma firmware kwa ATOM mwishoni mwa kidanganyifu. Kifaa hiki kinaauni programu yetu ya awali pekee.
Tafadhali elewa usumbufu unaoletwa kwako.
3.1.2.1 Vipengele
- ESP32 PICO-msingi
- Kitufe kinachopangwa
- Paneli ya matrix ya LED ya 5*5 RGB (WS2812C)
- LED iliyojengwa ndani ya infra-nyekundu
- Sensor Imejengwa ndani ya MPU6886
- Pini na Mashimo Zinazoweza Kurefushwa
- Jukwaa la Programu: Arduino UIFlow
3.1.2.2 Uainishaji
| Rasilimali | Kigezo |
| ESP32 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, Bluetooth ya hali mbili |
| Mwako | 4MB |
| Ingizo la Nguvu | 5V @ 500mA |
| Bandari | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Kiolesura cha PIN | G19, G21, G22, G23, G25, G33 |
| LED ya RGB | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Usambazaji wa infrared |
| Kitufe | Chini maalum x 1 |
| Antena | 2.4G Antena ya 3D |
| Joto la Uendeshaji | 32°F hadi 104°F (0°C hadi 40°C) |
| Uzito wa jumla | 3g |
| Uzito wa jumla | 14g |
| Ukubwa wa bidhaa | 24 x 24 x 14 mm |
| Ukubwa wa kifurushi | 24 x 24 x 14 mm |
| Nyenzo za kesi | Plastiki (PC) |
3.1.3 Servo Motor
myCobot inashiriki servo 6 za utendaji wa juu katika viungo 6 na advantagmajibu ya haraka, hali ndogo, mzunguko laini, torque thabiti, nk.
| Rasilimali | Kigezo |
| Ukubwa | 23.2*12.1*28.5mm |
| Ingizo la nguvu | 4.8~7.4V |
| Joto la Uendeshaji | -15 ~ 70 ° |
| Torque iliyokadiriwa | 1.5kg.cm@6V |
| Kamba nyembamba | 4.5kg.cm@6V |
| Pembe ya mzunguko | 300 ° (Angle inaweza kuzuiwa na programu) |
3.2 Muundo wa Mitambo
3.2.1 Ukubwa na anuwai ya kazi
A) mycobiota
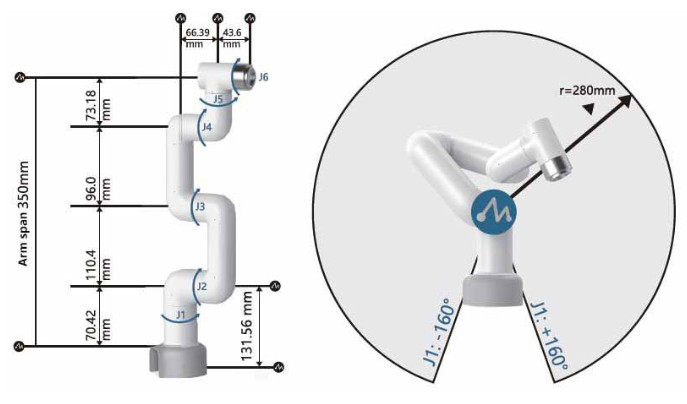
myCobot -Jedwali la safu ya pamoja ya mwendo
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
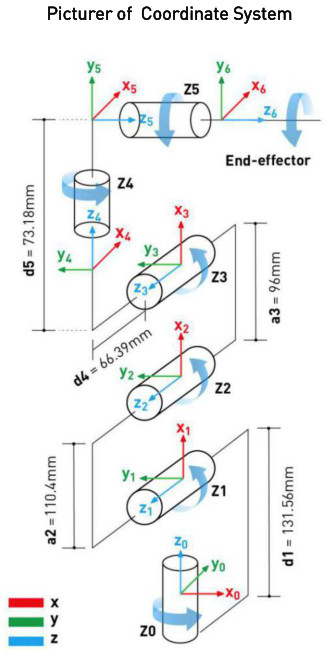
Mpiga picha wa Mfumo wa Kuratibu
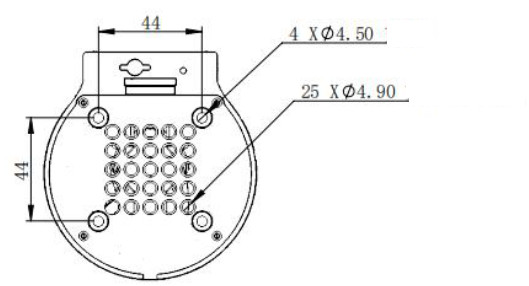
B) Mkutano wa Msingi
Msingi huo unaendana na mashimo ya sehemu ya Lego-tech na mashimo ya skrubu ya kupitia mashimo.
C) Maliza Bunge
Mwisho unaendana na shimo la sehemu ya Lego-tech na uzi wa skrubu.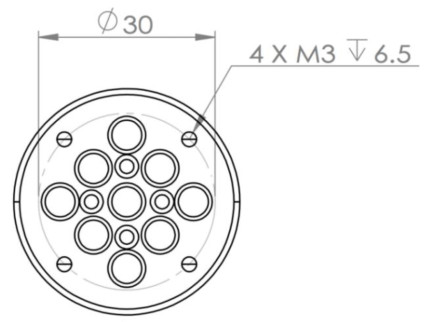
3.2.2 Kufungua na Kuweka
3.2.2.1 Kufungua
Kumbuka: Baada ya kisanduku cha upakiaji kuwekwa, tafadhali thibitisha kuwa kifungashio cha roboti ni shwari na hakijaharibika. Ikiwa kuna uharibifu wowote, tafadhali wasiliana na kampuni ya vifaa na mtoa huduma wa ndani kwa wakati. Baada ya kufungua, tafadhali angalia vitu halisi katika sanduku kulingana na orodha ya bidhaa.

| myCobot【seti ya kawaida】 | -myCobot-280 -Kipeperushi -Ugavi wa Nguvu -USB-Aina C -Mrukaji -M4 * 35, screw ya chuma cha pua -Wrench ya hexagon |
Tafadhali sakinisha mfumo wa roboti katika mazingira ambayo yanakidhi masharti yaliyofafanuliwa katika jedwali ili kutumia na kudumisha utendakazi wa mashine na kuitumia kwa usalama.
Mazingira na Masharti ya Uendeshaji
| Halijoto | -10℃~45℃ |
| Unyevu wa jamaa | 20%~70% |
| Ndani/Nje | Ndani |
| Mahitaji mengine ya Mazingira | -Epuka mwanga wa jua. - Weka mbali na vumbi, moshi wa mafuta, chumvi, filings za chuma, nk. -Epuka maji na gesi zinazoweza kuwaka na babuzi. -Usigusane na maji. -Haipitishi mshtuko, mtetemo n.k. - Weka mbali na vyanzo vikali vya mwingiliano wa sumakuumeme. |
3.2.2.2 Ufungaji
Uzito halisi wa roboti shirikishi ya mycobiota ni 850g. Kwa kuzingatia mwendo wa roboti, kitovu cha mvuto kitasonga kadri roboti inavyosonga. Kwa hivyo, roboti inahitaji kuwekwa kwenye msingi thabiti ili kutumika kawaida.
Ukubwa wa kiolesura cha msingi wa roboti: Shimo la kurekebisha tako ni kiolesura ambacho hurekebisha roboti kwenye besi au ndege nyingine. Saizi maalum ya shimo imeonyeshwa kama ifuatavyo. Ni 4 kupitia mashimo yenye kipenyo cha 4.5mm, ambayo inaweza kudumu na bolts M4.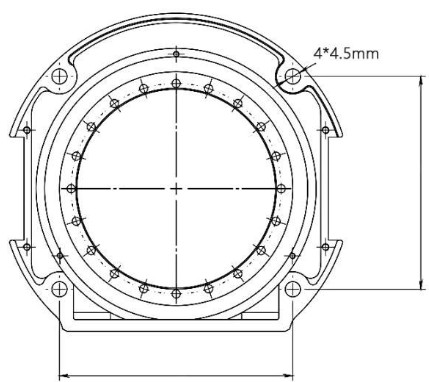
Hakikisha kuwa kuna shimo linalolingana kwenye msingi uliowekwa kabla ya kusakinisha. Kabla ya kusakinisha rasmi, tafadhali thibitisha:
- Mazingira ya kusakinishwa yanazingatia mahitaji hapo juu.
- Msimamo wa ufungaji sio chini ya safu ya kazi ya roboti, na kuna nafasi ya kutosha
kwa ajili ya ufungaji, matumizi, matengenezo na ukarabati. - Weka msimamo katika nafasi inayofaa.
- Zana zinazohusiana na usakinishaji ziko tayari, kama vile screws, wrenches, nk.
Baada ya kuthibitisha yaliyo hapo juu, sogeza roboti kwenye sehemu ya kupachika ya msingi, rekebisha mkao wa roboti, na utengeneze shimo la kurekebisha la msingi wa roboti na shimo kwenye uso wa kupachika wa msingi.
Kumbuka: Unaporekebisha mkao wa roboti kwenye msingi wa kupachika, tafadhali epuka kusukuma roboti moja kwa moja kwenye sehemu ya kupachika ya besi ili kuepuka mikwaruzo. Unaposogeza roboti wewe mwenyewe, tafadhali jaribu kuepuka kutumia nguvu ya nje kwenye sehemu dhaifu ya mwili wa roboti ili kuepuka uharibifu usio wa lazima kwa roboti.
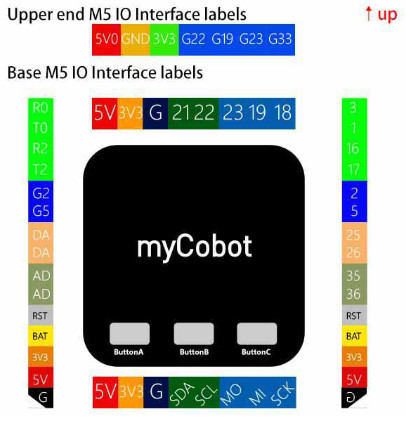
3.3 Umeme na Umeme
myCobot ina vituo vitatu vya nje. Ni vituo vya nje vya M5Stack Basic kwenye msingi, vituo viwili vya Grove karibu na tundu la umeme na pini za terminal za nje za kiungo cha M5Stack Atom J6.
a)M5STACK Mchoro wa Msingi wa Umeme

b)M5STACK Mchoro wa Mzunguko wa Atomu
c)IO Mchoro wa Kiolesura
Programu
Kwa sasisho za programu, tafadhali angalia Github yetu kwanza. https://github.com/elephantrobotics/myCobot
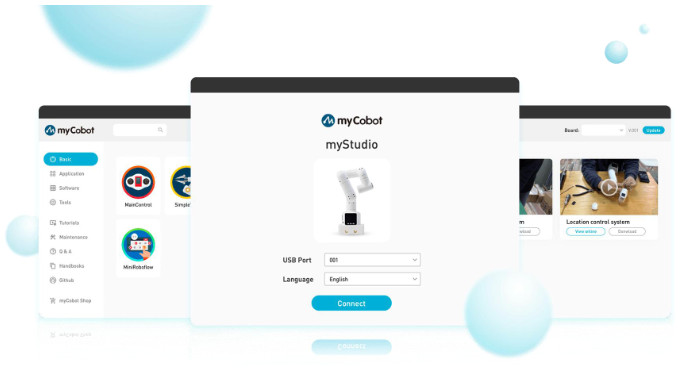
4.1 Uboreshaji na Urejeshaji wa Firmware - studio yangu
studio yangu ni jukwaa la kusimama mara moja la roboti za roboti/mycobiota yangu.
Kazi kuu za studio yangu ni: 1) Sasisha firmware; 2) Toa mafunzo ya video kuhusu jinsi ya kutumia roboti; 3) Toa maelezo ya matengenezo na ukarabati (kama vile mafunzo ya video, Maswali na Majibu, n.k.).
Kiungo cha video za youtube kuhusu myStudio ni: https://youtu.be/Kr9i62ZPf4w
Iwapo unahitaji kuboresha au kudumisha mycobiota yako, hakikisha kwamba mazingira ya uendelezaji yamewekwa. Ikiwa sivyo, tafadhali sakinisha kiendeshi cha bandari ya serial kwanza kisha ujaribu kutumia programu. Kiungo cha kupakua ni kama ifuatavyo:
Rasmi webtovuti: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Ikiwa unatumia mfumo wa Windows, tafadhali chagua “my studio-windows.exe” ili kupakua, kisha uifungue kwenye folda ya mradi wako. Kuwa mwangalifu usiitumie kwa njia ngumu, ambayo inaweza kusababisha shida na njia zisizotambulika.
Ikiwa mazingira yako ya ukuzaji tayari yamesanidiwa, unaweza kufungua moja kwa moja file "MyCobot. exe”.
Baada ya kufungua, interface ni kama ifuatavyo: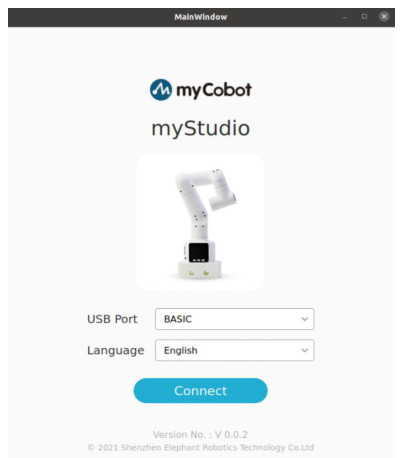
Unganisha myCobot yako na "Msingi" au "Atom", chagua "lugha" na kisha ubofye "Unganisha" ili kuingiza kiolesura kikuu inavyoonyeshwa hapa chini: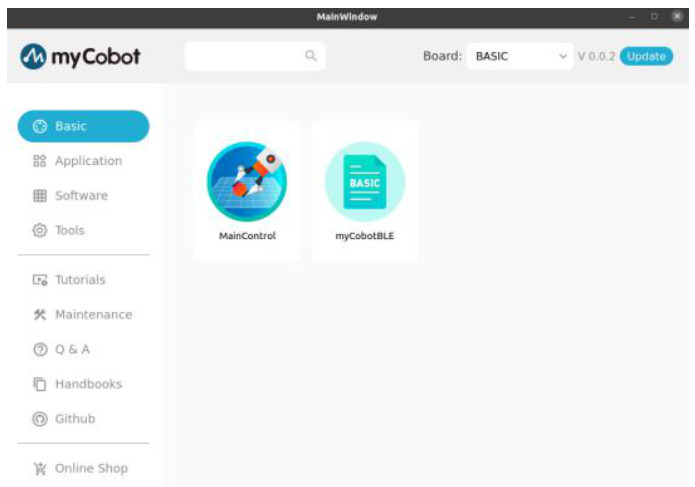
Ukiunganisha zote mbili Msingi na Atom, Teua programu unayotaka kuchoma tena kwenye Upau wa Bodi kwenye kona ya juu kulia, na kisha ubofye Msingi au Zana ili kuchagua programu dhibiti unayotaka kuchoma.
4.2 Rekodi ya Wimbo Iliyojumuishwa
Ubao kuu wa udhibiti wa M5STACK una vitufe 3 vinavyoauni upangaji programu maalum na uandishi wa data. Mpango huu ni chanzo wazi, unaweza kuangalia GitHub yetu.
Buruta Maonyesho ya Kufundisha
- Kurekodi: Baada ya kuingia modi ya kurekodi, chagua eneo la kuhifadhi kurekodi

Kitufe A: Hifadhi kwa Ram
Kitufe B: Hifadhi kwa Kadi ya Kumbukumbu
Kitufe C: Toka kwenye Hali ya Kurekodi - Anza Kurekodi

Baada ya kuchagua eneo la kuhifadhi, buruta mwenyewe mkono wa roboti ili kukamilisha kitendo kinacholengwa, kisha kitendo kitarekodiwa na kuhifadhiwa. - Cheza

Kitufe A: Anza Kucheza Kitendo Kilichorekodiwa
Kitufe B: Sitisha
Kitufe C: Toka Uchezaji
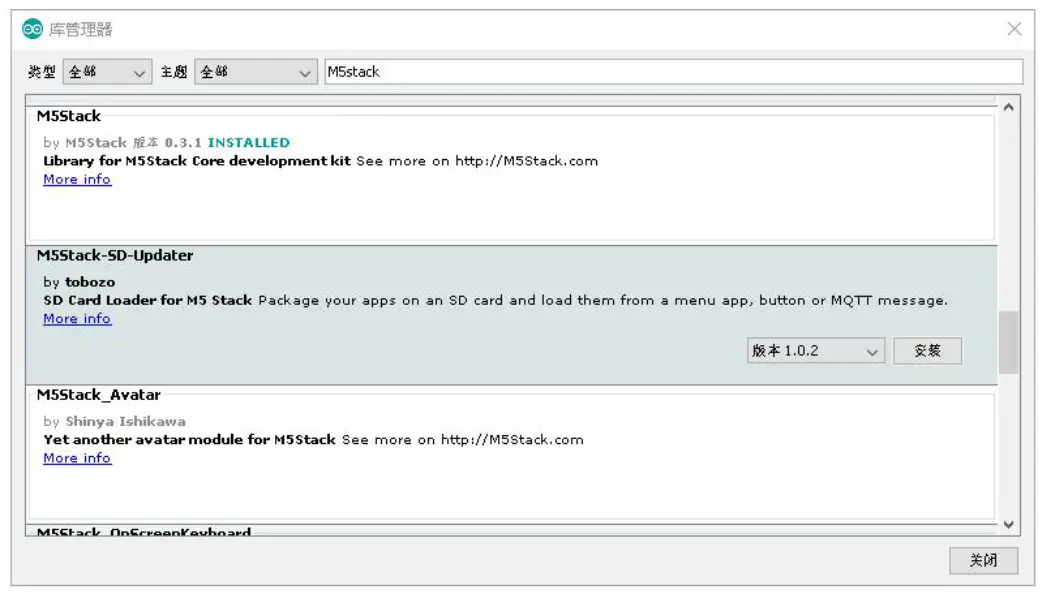
4.3 Maktaba za Arduino
Maktaba ni mkusanyiko wa misimbo inayokuruhusu kuunganisha na kutumia vitambuzi kwa urahisi, maonyesho, moduli n.k. Kwa ex.ampHata hivyo, maktaba ya LiquidCrystal iliyojengewa ndani inaweza kutambua mawasiliano rahisi na vionyesho vya LCD.
Kazi za bodi ya maendeleo ya Arduino zinaweza kupanuliwa wakati wa kutumia maktaba. Kwa sababu ya maktaba, tunaweza kutambua kwa urahisi ushirikiano kati ya Arduino na maunzi ya nje au mawasiliano ya data. Arduino IDE imesakinishwa awali na mfululizo wa maktaba ya kawaida files. Wakati huo huo, unaweza pia kusakinisha na kuagiza maktaba za watu wengine (kama vile maktaba za programu huria zilizopakuliwa kutoka kwa Mtandao) kwenye Arduino IDE. Unaweza hata kuunda maktaba na kuziingiza kwenye Arduino IDE. Kuwepo kwa maktaba kunasaidia watumiaji kukwepa maudhui maalum zaidi kama vile rejista na viashiria vya anwani, hivyo kupunguza kwa kiasi kikubwa ugumu wa maendeleo. Ikiwa unahitaji kujua jinsi ya kuongeza maktaba za watu wengine kwa usakinishaji wa ARDUINO IDE, tafadhali rejelea anwani ya usakinishaji wa dereva na njia: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development Unaweza pia kuangalia Github yetu kwa habari zaidi. https://github.com/elephantrobotics/myCobot
Unaweza pia kuangalia Github yetu kwa habari zaidi. https://github.com/elephantrobotics/myCobot
Kama ifuatavyo:
4.4 Kiolesura cha API na Mawasiliano
- UNIFLOW
- Arduino
- chatu mdogo
- FreeROTS
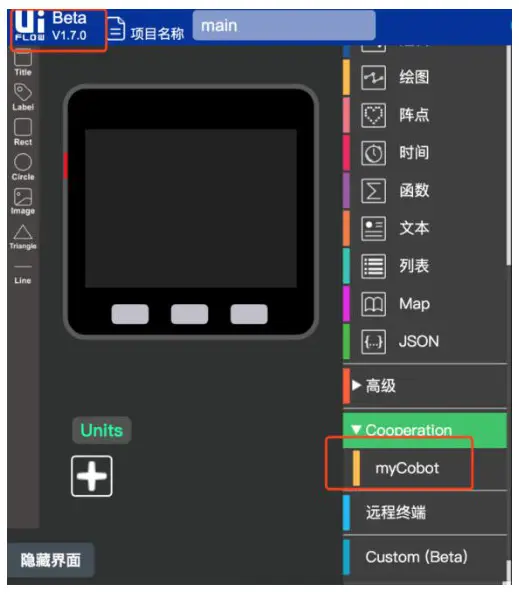
4.4.1 UIFlow
Tumia Toleo la UIFlow Beta na Chagua Ushirikiano - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS inatengenezwa na itasasishwa kulingana na maendeleo.
Kufikia 12.31:
- Ilisasisha usanidi wa ROS ili Python2 au 3 sasa iweze kusakinisha.
- Badilisha ili uingize mlango wa serial badala yake, ili watumiaji wa Windows waweze kuendesha moja kwa moja.
- Sasisha hati mpya ya vipimo vya Kiolesura katika Maktaba ya API, tafadhali tafuta "README".
- 4.6 Urekebishaji wa Pamoja
Ikiwa mobot yako inahitaji kusawazisha viungo, tafadhali tumia programu dhibiti ya mycobiota au Arduino na zana zingine kuchoma Urekebishaji kwanza.
Baada ya kupakia firmware, kiolesura cha Msingi kinaonyeshwa hapa chini:
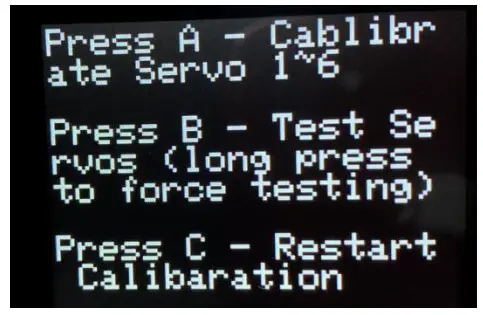
Kwa wakati huu, zungusha J1 hadi nafasi ya sifuri ya kawaida inayolingana na groove, na ubonyeze kitufe cha A (kitufe cha kushoto), kisha J1 itatoka kwenye mwendo wa nguvu hadi kwenye nafasi ya tuli na kurekebishwa kwa nafasi hii ya kawaida ya sifuri.
Rudia hatua zinazofuata njia hii ili kusanidi iliyobaki ya J2-J6. Baada ya kuweka J6, bonyeza kitufe cha A (kitufe cha kushoto) tena ili kuhifadhi Mipangilio yote.
Wakati viungo vyote vimerudi kwenye nafasi ya sifuri ya kawaida, unahitaji pia kuangalia ikiwa myCobot inaweza kufanya kazi kawaida. Bonyeza kitufe cha B (kitufe cha kati), kisha roboti yangu itagundua J1 hadi J6 kwa mlolongo.
Tafadhali hakikisha kuwa hakuna vizuizi au mwingiliano wa wafanyikazi ndani ya safu ya uendeshaji ili kuzuia uharibifu wa vifaa na wafanyikazi wakati wa majaribio.
Visual Programming na Programu ya Viwanda
5.1 Visual Programming Software-UIFlow
Kwa matumizi ya kina, tafadhali pata mwongozo wa uendeshaji wa UI Flow kutoka kwa kiungo kilicho hapa chini.
M5STACK Msingi: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
Atomu ya M5STACK: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Programu ya Kuweka Taswira ya Kiwanda-RoboFlow
myCobot inasaidia RoboFlow inayoendeshwa na roboti shirikishi za viwandani za Tembo. Mchakato wa uendeshaji wa RoboFlow ni rahisi na rahisi kutumia, na kiolesura cha maingiliano ni wazi na rahisi kuelewa, ambacho ni rahisi kwa watumiaji kujua haraka na kutumia, na kwa ufanisi husaidia watumiaji kukamilisha shughuli na kazi za programu kwa ufanisi. Hata watumiaji wa novice wanaweza pia kufikia kazi zinazolengwa kupitia shughuli rahisi.
Kwa matumizi ya kina, tafadhali pata mwongozo wa uendeshaji wa RoboFlow kutoka kwa kiungo kilicho hapa chini.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Huduma ya baada ya mauzo
- Huduma ya kurejesha ni mdogo kwa bidhaa ambazo hazijafunguliwa ndani ya siku 7 baada ya tarehe ya kupokea ya vifaa vya bidhaa. Mizigo au hatari zingine zinazotokea kwa malipo zitabebwa na mteja.
- Wateja wanapaswa kutoa ankara ya ununuzi na kadi ya udhamini kama uthibitisho wa udhamini wakati dhamana inapoulizwa.
- Roboti za Tembo zitawajibika kwa hitilafu za maunzi ya bidhaa zinazosababishwa na matumizi ya kawaida wakati wa kipindi cha udhamini.
- Kipindi cha udhamini huanza kutoka tarehe ya ununuzi au tarehe ya kupokea ya vifaa.
- Sehemu zenye hitilafu kutoka kwa bidhaa zitamilikiwa na Roboti ya Tembo, na gharama inayofaa itatozwa ikiwa ni lazima.
Ikiwa unahitaji kutuma maombi ya huduma ya udhamini, tafadhali wasiliana na huduma yetu kwa wateja kwanza ili kuthibitisha maelezo ya kina. Yafuatayo ni masharti ya udhamini wa vipengele vya kina:
Kumbuka: Ikiwa kuna mgongano na Brosha ya Bidhaa, Mwongozo wa Mtumiaji utatumika.
a) Sever motor
| Kipindi cha Udhamini | Huduma za Udhamini |
| ≤ mwezi 1 | Roboti za Tembo hutoa gari mpya bila malipo na kubeba mizigo. |
| Miezi 1-3 | Roboti ya Tembo inatoa gari mpya ya bure ya seva, forodha itabeba mizigo |
| ≥miezi 3 | Wateja wanahitaji kununua wenyewe. |
b (Sehemu za Umeme (M5)
| Kipindi cha Udhamini | Huduma za Udhamini |
| ≤3 miezi | Wateja wanahitaji kuirudisha baada ya kuitenganisha, Roboti za Tembo zitatuma mpya bila malipo na kubeba mizigo nje na nyumbani. |
| Miezi 3-6 | Wateja wanahitaji kuirejesha baada ya kuvunjwa na kubeba mizigo nje na nyumbani, Roboti ya Tembo itatuma mpya bila malipo. |
| ≥miezi 6 | Wateja wanahitaji kununua wenyewe. |
c) Sehemu za Muundo, pamoja na Sehemu za Shell
| Kipindi cha Udhamini | Huduma za Udhamini |
| ≤1 mwaka | Roboti ya Tembo hutoa vifaa vipya vya bure mara moja, forodha itabeba mizigo. |
| ≥mwaka 1 | Wateja wanahitaji kununua wenyewe. |
Katika kipindi cha udhamini wa bidhaa iliyotolewa, kampuni hurekebisha tu malfunctions ambayo hutokea wakati wa matumizi ya kawaida ya robot bila malipo. Walakini, katika kesi zifuatazo, mteja atatozwa kwa matengenezo (hata wakati wa udhamini):
- Uharibifu au utendakazi unaosababishwa na matumizi yasiyo sahihi na matumizi yasiyofaa tofauti na mwongozo.
- Kushindwa kunasababishwa na disassembly bila ruhusa na mteja.
- Uharibifu unaosababishwa na marekebisho yasiyofaa au matengenezo yasiyoidhinishwa.
- Uharibifu husababishwa na majanga ya asili kama vile tetemeko la ardhi na mafuriko.
tafadhali fuata kikamilifu maagizo katika mwongozo huu na mwongozo unaohusiana ili kuendesha roboti.
Maswali na Majibu:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
Swali: Mkusanyaji hakuweza kupata kifaa kinacholingana?
J: Kifaa kinaweza kuendelezwa tu baada ya kuweka mazingira ya uendelezaji na kusakinisha maktaba ya mradi husika.
Swali: Mkusanyaji hakuweza kukusanya sample mpango vizuri kupata kifaa sambamba?
J: Maktaba ya mradi inayohitajika haijasakinishwa au kuna mgongano na maktaba ya mradi. Tafadhali hakikisha kwamba maktaba ya mradi imesakinishwa ipasavyo kwanza. Iwapo itasakinishwa kwa usahihi bado haiwezi kujumuisha, tafadhali sakinisha upya mazingira ya ukuzaji wa Arduino.
Swali: Kifaa kilishindwa kufanya kazi vizuri baada ya kuchoma firmware kwa ATOM?
A: Firmware ya terminal ya ATOM inahitaji kutumia programu yetu ya kiwanda. Ikiwa programu dhibiti nyingine yoyote imechomwa kwa bahati mbaya, unaweza kuchagua”myCobot ATOM ATOMMAIN ili kuchoma terminal ya ATOM.
Swali: Kuna mtikisiko kidogo katika nafasi ya wima lakini si katika hali ya mwendo?
J: Tafadhali angalia ikiwa roboti yangu iko katika hali ya wima. mycobiota haiathiriwi na mvuto katika hali ya wima, uharibifu wa mitambo unaweza kusababisha tetemeko ndogo. Lakini hakutakuwa na mitetemeko itakapokuwa nje ya hali ya wima. Kasi iliyopendekezwa ni 400-500 katika hali ya wima.
Swali: Je, mfumo wa ROS utatoza baadaye?
J: ROS ni chanzo wazi na itasasishwa kwa Github yetu. Hakuna malipo kwa uboreshaji wa programu dhibiti.
Wasiliana Nasi
Kama unahitaji msaada wowote, tafadhali wasiliana nasi kama ifuatavyo.
Shenzhen Elephant Robotic Technology Co., Ltd
Anwani: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, China
Barua pepe: support@elephantrobotics.com
Simu: +86(0755)-8696-8565 (siku ya kazi 9:30-18:30)
Webtovuti: www.elephantrobotics.com
Twitter: CobotMy

Nyaraka / Rasilimali
 |
Roboti za Tembo MyCobot Six-Axis Collaborative Robot Arm [pdf] Mwongozo wa Mtumiaji MyCobot, Six-Axis Collaborative Robot Arm, MyCobot Six-Axis Six-Axis Robot Arm, V20210309 |



