![]() استعمال ڪندڙ دستي
استعمال ڪندڙ دستي![]()

حق اشاعت جو اعلان
ڪو به يونٽ يا فرد هن دستور جي ڪنهن به مواد (مثال طور: ٽيڪنيڪل دستاويز، سافٽ ويئر، وغيره) کي ڪڍي، گڏ ڪري، ترجمو يا ٻيهر پيدا نٿو ڪري سگهي، ۽ نه ئي ڪنهن به شڪل ۾ (بشمول مواد ۽ اشاعت) شينزين ايليفنٽ روبوٽڪس ٽيڪنالاجي ڪمپني جي تحريري اجازت کانسواءِ لميٽيڊ.
ان کان علاوه، هن دستور ۾ ذڪر ڪيل پراڊڪٽ جي معلومات ۽ لاڳاپيل وسيلا صرف حوالن لاءِ آهن ۽ مواد بغير اطلاع جي تبديلي جي تابع آهن.
سواءِ ان جي جيئن هن دستور ۾ واضح طور تي بيان ڪيو ويو آهي، هن دستور ۾ ڪنهن به شيءِ کي ڪنهن خاص مقصد لاءِ ذاتي نقصان، ملڪيت کي نقصان، يا فٽنيس جي Elephant Robotics جي ڪنهن به وارنٽي يا گارنٽي طور نه سمجهيو وڃي. سڀ حق محفوظ آهن!
|
نسخو |
وصف |
نوٽ |
| وي 2020.12.31 | شامل ڪيو ويو تصويرر جو myCobot【معياري سيٽ】، بيس اسيمبلي، ۽ آخر اسيمبلي | |
| وي 2021.02.04 | ڪوآرڊينيٽ سسٽم، MyStudio سافٽ ويئر جو تصوير شامل ڪيو ويو |
مٿانview
دستي جي باري ۾
MyCobot تعاون ڪندڙ روبوٽ استعمال ڪرڻ ۾ ڀليڪار ۽ توھان جي خريداري لاءِ مھرباني.
هي دستور بيان ڪري ٿو احتياطي تدبيرون مناسب تنصيب ۽ استعمال لاءِ MyCobot. مھرباني ڪري ھن روبوٽ سسٽم کي انسٽال ڪرڻ کان پھريائين ھن دستوري ۽ ٻين لاڳاپيل ھدايتن کي احتياط سان پڙھو. پڙهڻ کان پوء، مهرباني ڪري ان کي محفوظ جاء تي رکو ته جيئن توهان ڪنهن به وقت ان تائين رسائي ڪري سگهو ٿا. دستي جي شين کي پڙهڻ
ھي دستور ھدف آھي:
- انسٽالر
- ڊيبگر.
- سار سنڀال جو عملو.
 |
جيڪي ماڻهو MyCobot تعاون ڪندڙ روبوٽ کي انسٽال/ڊيبگ/رکندا آهن، انهن کي لازمي طور تي ايليفنٽ روبوٽڪس ۾ تربيت حاصل ڪئي ويندي آهي ۽ انهن کي مٿين ڪم لاءِ گهربل مشيني ۽ اليڪٽرانڪ علم هجڻ گهرجي. |
ڪيئن استعمال ڪجي
ھي دستور العمل استعمال ٿيڻ گھرجي جڏھن ھيٺيون ڪم ڪري رھيا آھن:
- تنصيب جو ڪم: روبوٽ کي ڪم ڪرڻ واري پوزيشن ڏانھن منتقل ڪريو ۽ ان کي انسٽاليشن جي هدايتن جي مطابق بنيادي طور تي درست ڪريو.
- ڊيبگنگ: روبوٽ کي ڪم جي حالت ۾ ڊيبگ ڪرڻ.
- سار سنڀال جو ڪم: باقاعده سار سنڀال روبوٽ سسٽم ان جي عام ڪم کي يقيني بڻائڻ لاء. جڏهن روبوٽ خراب ٿئي ٿي ماحولياتي اثرن جي ڪري يا صارف جي غلط آپريشن، يا روبوٽ سسٽم جو هڪ خاص جزو عام سروس جي زندگي کان وڌيڪ آهي، روبوٽ کي مرمت ڪرڻ جي ضرورت آهي.
نوٽ:
- هي دستياب بين الاقوامي استعمال ڪندڙن تي لاڳو ٿئي ٿو، انهي سان گڏ هانگ ڪانگ، ميڪو ۽ تائيوان ۾ استعمال ڪندڙ.
- هي دستياب باقاعده اپڊيٽ نه ڪيو ويو آهي. اپڊيٽ ٿيل تاريخ جو نسخو نمبر آهي. صارفين کي سرڪاري کان جديد نسخو ڊائون لوڊ ڪري سگهو ٿا webڪنهن به وقت Elephant Robot جي سائيٽ.
سيڪيورٽي
هي باب انهن ماڻهن لاءِ عام حفاظت جي معلومات جو تفصيل ڏئي ٿو جيڪي روبوٽس تي تنصيب، سار سنڀال ۽ مرمت جو ڪم ڪن ٿا. مھرباني ڪري پڙھو ۽ سمجھو ھن باب جي مواد ۽ احتياط کان پھريائين ان کي ھٿ ڪرڻ، انسٽال ڪرڻ ۽ استعمال ڪرڻ.
1.1 خطري جي سڃاڻپ
تعاون ڪندڙ روبوٽ جي حفاظت روبوٽ جي مناسب ترتيب ۽ استعمال جي بنياد تي مبني آهي، ۽ جيتوڻيڪ سڀني حفاظتي هدايتن جو مشاهدو ڪيو وڃي، آپريٽر جي ڪري زخم يا نقصان اڃا به ٿي سگهي ٿو. تنهن ڪري، روبوٽ جي استعمال جي حفاظتي خطرن کي سمجهڻ تمام ضروري آهي، جيڪو انهن جي اچڻ کان اڳ مسئلن کي روڪڻ لاء فائدي وارو آهي.
هيٺ ڏنل جدول 1-2 ~ 4 عام حفاظتي خطرا آهن جيڪي شايد روبوٽ استعمال ڪرڻ جي حوالي سان موجود هجن:
ٽيبل 1- 2 خطرناڪ حفاظتي خطرا
 |
|
| 1 | روبوٽ سنڀالڻ دوران غلط آپريشن جي ڪري ذاتي زخم يا روبوٽ نقصان. |
| 2 | ذاتي زخم يا روبوٽ کي نقصان ٿئي ٿو ڇاڪاڻ ته روبوٽ کي مقرر نه ڪيو ويو آهي گهربل طور تي، مثال طورampلي، اسڪرو خراب يا تنگ نه ڪيو ويو آهي، ۽ بنيادي طور تي تيز رفتار حرڪت لاءِ روبوٽ کي مضبوطيءَ سان سپورٽ ڪرڻ لاءِ ڪافي ناهي، جنهن سبب روبوٽ کي ٽپو پوي ٿو. |
| 3 | روبوٽ جي مناسب حفاظتي فنڪشن جي ترتيب کي انجام ڏيڻ ۾ ناڪامي، يا حفاظتي حفاظتي اوزارن جي تنصيب وغيره، روبوٽ جي حفاظتي فنڪشن کي ناڪام ٿيڻ جو سبب ٿي سگھي ٿو. |
ٽيبل 1- 3 ڊيڄاريندڙ سطح سيڪيورٽي خطرن
 |
|
| 1 | روبوٽ سان گڏ راند ڪريو، توھان کي ھلندڙ روبوٽ طرفان ماريو وڃي ٿو، يا ڪنھن رڪاوٽ جي ڪري ڦاسي سگھي ٿو جيئن ڪيبل کي ذاتي زخم جو سبب بڻائڻ. |
| 2 | غير مجاز اهلڪار حفاظتي ترتيبن جي ماپن کي تبديل ڪري ٿو، جنهن جي ڪري حفاظتي ڪم کي ناڪام ٿيڻ يا خطرو آهي. |
| 3 | ڇڪتاڻ ۽ پنڪچر تيز سطحن جي ڪري ٿين ٿا جهڙوڪ ڪم جي ماحول ۾ ٻين ڊوائيسز يا روبوٽ جي آخر اثر ڪندڙ. |
| 4 | روبوٽ هڪ درست مشين آهي ۽ پيڊلنگ روبوٽ کي نقصان پهچائي سگهي ٿي. |
|
5 |
جيڪڏهن clamp جاءِ تي نه آهي يا روبوٽ جي پاور سپلائي بند ٿيڻ کان اڳ يا گيس جو سرچشمو بند ڪيو ويو آهي (اهو طئي ناهي ڪيو ويو ته آخر اثر ڪندڙ طاقت جي نقصان جي ڪري بند ٿيڻ کان سواءِ اعتراض کي مضبوطي سان رکي ٿو). جيڪڏهن clamped اعتراض کي نه هٽايو ويو آهي، اهو خطرو ٿي سگهي ٿو، جهڙوڪ ماڻهو حادثي سان زخمي ٿي پيا آهن. |
| 6 | روبوٽ جي حادثاتي حرڪت جو خطرو آهي. ڪنهن به حالت ۾ توهان کي روبوٽ جي ڪنهن به محور هيٺ بيهڻ نه گهرجي! |
| 7 | هڪ روبوٽ هڪ درست مشين آهي. جيڪڏهن ان کي سنڀالڻ دوران آسانيءَ سان نه رکيو وڃي ته اهو وائبريشن جو سبب بڻجي سگهي ٿو ۽ روبوٽ جي اندروني حصن کي نقصان پهچائي سگھي ٿو. |
ٽيبل 1- 4 امڪاني حفاظتي خطرا جن جي نتيجي ۾ برقي جھٽڪو ٿي سگھي ٿو
 |
|
| 1 | غير اصل ڪيبل استعمال ڪرڻ سان اڻڄاتل خطرو ٿي سگھي ٿو. |
| 2 | برقي سامان ذريعي مائع سان رابطو ڪرڻ جي نتيجي ۾ بجليء جي رسي جو خطرو ٿي سگھي ٿو. |
| 3 | اتي ٿي سگھي ٿو اليڪٽرڪ جھٽڪو جو خطرو جڏھن برقي ڪنيڪشن غلط آھي. |
| 4 | ڪنٽرولر ۽ لاڳاپيل سامان کي پاور بند ڪرڻ ۽ پاور ڪنڊ کي ان پلگ ڪرڻ کان پوءِ متبادل ڪم کي سنڀالڻ جي پڪ ڪريو. جيڪڏهن ڪم ڪيو ويندو آهي جڏهن پاور هلندي آهي، اهو ٿي سگهي ٿو برقي جھٽڪو يا خرابي. |
1.2 حفاظتي احتياط
هيٺ ڏنل حفاظتي ضابطن تي عمل ڪرڻ گهرجي جڏهن منهنجو روبوٽ استعمال ڪيو وڃي:
- mycobiota برقي سامان آهي. غير پيشه ور ٽيڪنيشين تار کي تبديل نٿا ڪري سگهن، ٻي صورت ۾، اهو ڊوائيس يا شخص کي زخمي ڪرڻ لاء خطرناڪ آهي.
- خطري، خبرداريءَ جا نشان ھن دستور العمل ۾ صرف حفاظتي احتياطن لاءِ اضافي آھن.
- مھرباني ڪري مخصوص ماحول جي دائري ۾ mycobiota استعمال ڪريو. جيڪڏهن نه، وضاحتن ۽ لوڊ جي حالتن کان وڌيڪ پراڊڪٽ جي خدمت جي زندگي کي گهٽائي ڇڏيندو جيتوڻيڪ سامان کي نقصان پهچائيندو.
- ميڪوبيوٽا کي هلائڻ ۽ برقرار رکڻ کان اڳ، تنصيب، آپريشن ۽ سار سنڀال لاءِ ذميوار اهلڪارن کي مختلف حفاظتي احتياطن ۽ آپريشن ۽ سار سنڀال جي صحيح طريقن کي سمجهڻ لاءِ تربيت ڏني وڃي.
- اشتهار ۾ mycobiota استعمال نه ڪريوamp ماحول کي نقصان کان بچڻ لاء هڪ ڊگهي وقت تائين، myCobot صحت واري اليڪٽرانڪ اجزاء سان تعلق رکي ٿو.
- اعلي درجه حرارت واري ماحول ۾ ميڪوبيوٽا استعمال نه ڪريو. مائيڪوبيوٽا جي ٻاهرئين مٿاڇري کي خام مال جي طور تي فوٽو حساس رال مان ٺهيل آهي، اعلي درجه حرارت شيل کي نقصان پهچائيندو ۽ ناڪامي جو سبب بڻائيندو.
- انتهائي corrosive صفائي mycobiota صاف ڪرڻ لاء مناسب نه آهي. anodized اجزاء وسرندڙ صفائي لاء مناسب نه آهن.
- سامان يا حادثن کي نقصان کان بچڻ لاءِ مائونٽنگ بيس کان سواءِ منهنجو روبوٽ استعمال نه ڪريو. myCobot کي استعمال ڪيو وڃي هڪ مقرر ۽ بي ترتيب ماحول ۾.
- MyCobot کي پاور سپلائي ڪرڻ لاءِ ٻيا پاور اڊاپٽر استعمال نه ڪريو جيڪڏھن اھو نان ڪنفارمنگ اڊاپٽر جي استعمال جي ڪري خراب ٿئي ٿو، اھو بعد ۾ سيلز سروس ۾ شامل نه ڪيو ويندو.
- مھرباني ڪري اسڪرو ۽ انھن جي شيل کي ڌار يا ختم نه ڪريو. جيڪڏهن اهو کوليو ويو آهي، ڪا به وارنٽي سروس مهيا نه ٿي ڪري سگھجي.
- ماڻهو پروفيشنل ٽريننگ کان سواءِ myCobot جي مرمت نٿا ڪري سگهن. جيڪڏهن منهنجي روبوٽ سان ڪو مسئلو آهي، مهرباني ڪري وقت ۾ myCobot ٽيڪنيڪل سپورٽ انجنيئر سان رابطو ڪريو.
- مھرباني ڪري لاڳاپيل قانونن جي تعميل ڪريو خراب ٿيل ميڪوبيوٽا سان ڊيل ڪرڻ لاءِ، ۽ ماحول جي حفاظت ڪريو.
- ٻارن کي اڪيلو منهنجي روبوٽ سان کيڏڻ نه ڏيو. هلائڻ دوران سڀني عملن جي نگراني ڪرڻ جي ضرورت آهي. عمل ختم ٿيڻ کان پوء، مھرباني ڪري سامان کي فوري طور تي بند ڪريو.
- اهو منع ٿيل آهي تبديل ڪرڻ يا هٽائڻ جي نالي جي پليٽ، هدايتون، آئڪن، ۽ نشانن کي روبوٽ بازو ۽ لاڳاپيل سامان تي.
- نه ساڙيو ٻين پراڊڪٽ ڊرائيورن کي ٽرمينل ايٽم ڏانهن. جيڪڏهن ڊوائيس خراب ٿي وئي آهي انهي جي ڪري، اهو شامل نه ڪيو ويندو بعد ۾ سيلز سروس ۾.
مھرباني ڪري ھيٺ ڏنل مقصدن لاءِ Chatbot تعاون ڪندڙ روبوٽ استعمال نه ڪريو. - طبي ۽ زندگيء جي نازڪ ايپليڪيشنون.
- هڪ ماحول ۾ جيڪو هڪ ڌماڪو ٿي سگهي ٿو.
- خطري جي تشخيص کان سواء سڌو استعمال ڪيو.
- حفاظتي فنڪشن جي سطحن جو ڪافي استعمال.
- روبوٽ ڪارڪردگي جي پيٽرولن جو متضاد استعمال.
جيڪڏھن توھان وٽ ھن دستياب بابت ڪي سوال آھن مھرباني ڪري دورو ڪريو ۽ پنھنجي راءِ ڏيو:https://www.elephantrobotics.cn.
1.3 استعمال جا منظر
Mycobiota بابت
2.1 پس منظر
“Enjoy Robots World” جي مشن کي برقرار رکندي، Elephant Robotics ڊزائين ۽ ترقي ڪئي مائيڪوبيوٽا، دنيا جو سڀ کان ننڍو ۽ هلڪو تعاون ڪندڙ روبوٽ، صنعتي روبوٽس جي اڪثر ڪمن کي برقرار رکي ٿو. ڪمپيڪٽ ۽ خوبصورت صنعتي ڊيزائن، شاندار ۽ طاقتور ڪارڪردگي، ۽ وڏي سافٽ ويئر ۽ هارڊويئر ڊولپمينٽ اسپيس سان، MyCobot وٽ ايپليڪيشن جي توسيع ۾ لامحدود امڪان آهن.
Mycobiota جي ڊيزائن پروٽوٽائپ 2018 ۾ چين ۾ Elephant Robot پاران شروع ڪيل آل-ان-ون روبوٽ مان آهي. چين ۾ پهريون گڏيل تعاون ڪندڙ روبوٽ جي حيثيت سان، هن 2019 CAIMRS انڊسٽريل روبوٽ انوويشن ايوارڊ ۽ 2019 هاءِ ٽيڪ روبوٽ سالانه ”نوويشن“ حاصل ڪيو آهي. ٽيڪنالاجي وارڊ”، ۽ پڻ 30 کان وڌيڪ ملڪن کي وڪرو ڪيو ويو آهي گهر ۾ ۽ ٻاهرين ملڪن ۾، دنيا جي مٿين 500 ادارن جي فيڪٽرين مان متفقه ساراهه ۽ سڃاڻپ حاصل ڪري ٿي.
2.2 تعارف
mycobiota دنيا جو سڀ کان ننڍڙو ۽ هلڪو ڇهه محور تعاون ڪندڙ روبوٽ آهي، جيڪو گڏيل طور تي Elephant Robotics ۽ M5Stack پاران تيار ڪيو ويو آهي. اهو هڪ پيداواري اوزار کان وڌيڪ آهي تخيل جي مڪمل، ثانوي ترقي تي وٺي سگھي ٿو صارفين جي مطالبن جي مطابق ذاتي ڪسٽمائيزيشن حاصل ڪرڻ لاء.
850g جي وزن سان، 250g جي پيل لوڊ، ۽ 350mm جي هٿن جي ڊگھائي، MyCobot ڪمپيڪٽ پر طاقتور آهي، نه رڳو مختلف قسم جي ايپليڪيشن منظرنامن کي ترتيب ڏيڻ لاءِ مختلف قسم جي آخري اثر ڪندڙن سان ملائي سگهجي ٿو. ملٽي پليٽ فارم سافٽ ويئر مختلف حالتن جي ضرورتن کي پورو ڪرڻ لاءِ جيئن ته سائنسي تحقيق ۽ تعليم، سمارٽ گهر، هلڪي صنعت، ۽ تجارتي ايپليڪيشنون.
myCobot - بنيادي پيٽرولر
| آزادي جو درجو | 6 |
| پيل لوڊ | 250 جي |
| بازو جو دائرو | 350mm |
| ڪم ڪندڙ ريڊيس | 280mm |
| ورجائي قابليت | ±0.5mm |
| وزن | 850 جي |
| پاور ان پٽ | 8V، 5A |
| ڪم ڪرڻ جي حالت | -5° ~ 45° |
| ڪميونيڪيشن | USB قسم-سي |
2.3 خاصيتون
- منفرد صنعتي ڊيزائن ۽ انتهائي ڪمپيڪٽ
mycobiota هڪ مربوط ماڊلر ڊيزائن آهي ۽ صرف 850g وزن آهي جيڪو کڻڻ تمام آسان آهي. ان جي مجموعي جسماني جوڙجڪ گھٽ اسپيئر پارٽس سان ٺھيل آھي ۽ پلگ ۽ راند کي محسوس ڪرڻ لاءِ جلدي ڌار ۽ تبديل ڪري سگھجي ٿو. - اعلي ترتيب ۽ 2 اسڪرين سان ليس
myCobot تي مشتمل آهي 6 اعلي ڪارڪردگي سروو موٽرز سان گڏ تيز جواب، نن inertia، ۽ هموار
گردش. جسم ۾ 2 ڊسپلي اسڪرينون آھن جيڪي تيز ٿيل لائبريري کي وڌائڻ لاءِ مدد ڪن ٿيون
منظر وڌيڪ آسان ۽ واضح طور تي. - ليگو ڪنيڪٽر ۽ هزارين M5STACK ماحولياتي ايپليڪيشن
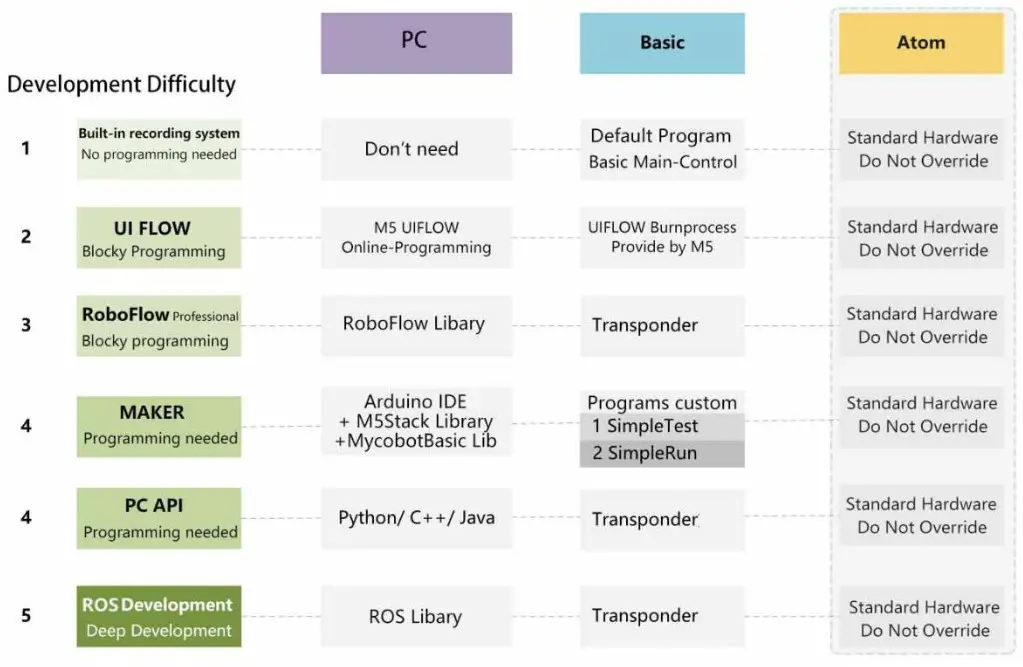
Mycobiota جو بنياد ۽ پڇاڙي هڪ Lego Connector سان ليس آهي، جيڪو مختلف ننڍن سرايت ٿيل سامان جي ترقي لاء مناسب آهي. ان جو بنياد M5STACK Basic پاران ڪنٽرول ڪيو ويو آھي، ۽ ھزارين ايپليڪيشن ڪيس سڌو سنئون استعمال ڪري سگھجن ٿا. - بلاڪي پروگرامنگ ۽ سپورٽنگ صنعتي ROS
UIFlow بصري پروگرامنگ سافٽ ويئر استعمال ڪندي، منهنجي روبوٽ کي پروگرام ڪرڻ تمام سادو ۽ آسان آهي.
توھان پڻ استعمال ڪري سگھو ٿا RoboFlow، Elephant Robotics مان صنعتي روبوٽس جو سافٽ ويئر، ڪيترن ئي فنڪشنل ماڊلز کي سپورٽ ڪندي Arduino + ROS اوپن سورس سسٽم. - ٽريڪ رڪارڊنگ ۽ سکو هٿ سان
روايتي پوائنٽ سيونگ موڊ کان نجات حاصل ڪريو، MyCobot محفوظ ٿيل ٽريڪ کي رڪارڊ ڪرڻ لاءِ ڊريگ ٽرائل ٽيچنگ کي سپورٽ ڪري ٿو ۽ 60 منٽن تائين مختلف ٽريڪز کي بچائي سگھي ٿو ان کي نئين رانديگرن لاءِ سکڻ آسان ۽ مزيدار بڻائي ٿو.
2.4 پيٽرن
منهنجي روبوٽ بابت لاڳاپيل پيٽرن
|
نه. |
سرٽيفڪيٽ نمبر. | پيٽ جو نالو | پيٽنٽ نمبر. |
پيٽينٽ ڪندڙ |
| 1 | نمبر 8194138 | مشيني بازو ڳنڍڻ ۽ هڪ مشيني بازو | ZL 2018 20017484.4 | هاٿي روبوٽڪس |
| 2 | نمبر 8186088 | مشيني بازو گڏيل ڪنيڪٽر ۽ هڪ مشيني بازو | ZL 2017 21700594.2 | هاٿي روبوٽڪس |
| نه. | پيداوار | پيٽرن جو قسم | عنوان |
پيٽنٽ نمبر. |
| 1 | هلڪو وزن وارو روبوٽڪ بازو | ظاهر patent | اجتماعي روبوٽ بازو | 2020030683471.3 |
|
نه. |
ايجاد جو عنوان |
درخواست نمبر |
| 1 | روبوٽ جي پوزيشن کي برقرار رکڻ، ڇڪڻ، ۽ درس ڏيڻ جو طريقو ۽ سسٽم | ZL 2018 1 1634649.3 |
| 2 | هڪ روبوٽ آن لائن ٽڪر جي ڳولا جو طريقو ۽ سسٽم رفتار جي ماڊل تي ٻڌل آهي | ZL 2019 1 0030748.9 |
| 3 | هڪ قسم جو روبوٽ متحرڪ پيراميٽر جي سڃاڻپ جو طريقو جوائنٽ اينگولر ايڪسلريشن کان آزاد | ZL 2019 1 0773865.4 |
هارڊويئر
3.1 ڪنٽرولر ۽ عمل ڪندڙ
3.1.1 M5STACK بنيادي مکيه ڪنٽرولر
M5STACK بنيادي ڪٽ، ان جي نالي وانگر، M5STACK ڊولپمينٽ کٽ سيريز جي وچ ۾ هڪ اسٽارٽر کٽ آهي.
اهو هڪ ماڊلر، اسٽيڪبل، اسپيبلبل، ۽ پورٽيبل ڊيوائس آهي جيڪو ESP-32 ڪور سان هلندڙ آهي، جيڪو ان کي اوپن سورس، گهٽ قيمت، مڪمل فنڪشن، ۽ ڊولپرز لاءِ آسان بڻائي ٿو ته هو سڀني شين تي نئين پراڊڪٽ ڊولپمينٽ کي هٿي وٺن.tagسرڪٽ ڊيزائن، پي سي بي ڊيزائن، سافٽ ويئر، ٺهيل ڊيزائن، ۽ پيداوار شامل آهن. هي بنيادي کٽ هڪ دوستانه قيمت ۽ مڪمل خصوصيت وارا وسيلا مهيا ڪري ٿي جيڪا توهان لاءِ IoT کي ڳولڻ لاءِ هڪ سٺي اسٽارٽر کٽ ٺاهي ٿي.
جيڪڏهن توهان IoT پروٽوٽائپنگ جو تيز ترين طريقو ڳولڻ چاهيو ٿا، M5STACK ڊولپمينٽ بورڊ هڪ بهترين حل آهي. ٻين وانگر نه، M5STACK ڊولپمينٽ بورڊ انتهائي ڪارائتو آهي، جيڪو صنعتي-گريڊ ڪيس ۽ ESP32-بنياد ڊولپمينٽ بورڊ سان ڍڪيل آهي. اهو وائي فائي ۽ بلوٽوٿ ماڊلز سان ضم ٿئي ٿو ۽ ان ۾ ڊبل ڪور ۽ 16MB SPI فليش شامل آهي. گڏو گڏ 30+ M5Stack اسٽيڪبل ماڊلز، 40+ وڌائڻ وارا يونٽ، ۽ پروگرام جي ٻولي جي مختلف سطحن سان، توهان تمام مختصر وقت ۾ پنهنجي IoT پراڊڪٽ ٺاهي ۽ تصديق ڪري سگهو ٿا.
سپورٽ ڊولپمينٽ پليٽ فارم ۽ پروگرامنگ ٻوليون: Arduino، UIFlow سان بلاڪي ٻولي، Micropython. قطع نظر ته توهان وٽ پروگرامنگ جي مهارت جي ڪهڙي سطح آهي، M5STACK توهان جي هر قدم ۾ توهان جي رهنمائي ڪندو توهان جي خيال کي محسوس ڪرڻ لاءِ ۽ انهي سان گڏ حتمي پيداوار جي لاءِ. جيڪڏهن توهان ڪڏهن ESP8266 سان کيڏيو ٿا، توهان محسوس ڪندا ته ESP32 ESP8266 مان هڪ مڪمل اپ گريڊ آهي. مقابلي ۾، ESP32 وٽ وڌيڪ GPIOs، وڌيڪ اينالاگ ان پٽس، ٻه اينالاگ آئوٽ پُٽ، گھڻا اضافي پرديئرز (جهڙوڪ اسپيئر UART). سرڪاري ترقي ڪندڙ پليٽ فارم ESP-IDF FreeRTOS سان منتقل ڪيو ويو آهي. ٻٽي-ڪور ۽ حقيقي-وقت OS سان، توهان حاصل ڪري سگهو ٿا وڌيڪ منظم ڪوڊ ۽ هڪ تمام تيز رفتار پروسيسر.
M5STACK بنيادي ٻن الڳ حصن تي مشتمل آهي. مٿي واري حصي ۾ سڀني قسمن جا پروسيسر، چپس ۽ ڪجھ ٻيا سلاٽ حصا شامل آھن. M-BUS ساکٽ، ۽ ٻنهي پاسن تي وڌائڻ وارا پن.
3.1.1.1 مصنوعات جون خاصيتون
- ESP32 جي بنياد تي
- بلٽ ان اسپيڪر، بٽڻ، رنگ LCD، پاور / ري سيٽ بٽڻ
- TF ڪارڊ سلاٽ (16G وڌ ۾ وڌ سائيز)
- مقناطيسي سکشن پوئتي تي
- وڌايل پن ۽ سوراخ
- ايم-بس ساکٽ ۽ پن
- پروگرام پليٽ فارم: UIFlow، MicroPython، Arduino
3.1.1.2 پيرا ميٽر
| وسيلا | پيرا ميٽر |
| ESP32-D0WDQ6 | 240MHz ٻٽي-ڪور، 600 DMIPS، 520KB SRAM، وائي فائي، ٻٽي موڊ بلوٽوت |
| چمڪ | 16 ايم بي |
| پاور ان پٽ | 5V @ 500mA |
| بندرگاهه | ٽائپ سي x 1، گروو (I2C+I/0+UART) x 1 |
| ڪور هيٺان پورٽ | پن (G1, G2, G3, G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS اسڪرين | 2 انچ، 320 × 240 رنگين TFT LCD، ILI9342C، روشني853nit |
| اسپيڪر | 1W-0928 |
| بٽڻ | ڪسٽم بٽڻ x 3 |
| اينٽينا | 2.4G 3D اينٽيننا |
| آپريٽنگ جي درجه حرارت | 32°F کان 104°F (0°C کان 40°C) |
| خالص وزن | 47.2 جي |
| مجموعي وزن | 93 جي |
| پيداوار جي ماپ | 54 x 54 x 18 ملي ميٽر |
| پيڪيج جي ماپ | 95 x 65 x 25 ملي ميٽر |
| ڪيس مواد | پلاسٽڪ (PC) |
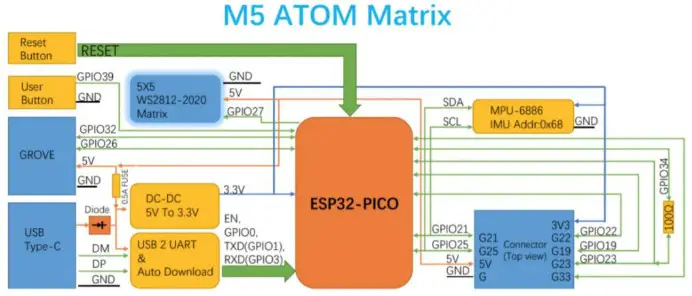
3.1.2 M5 اسٽيڪ ايٽم
ATOM ميٽرڪس، جنهن جي ماپ صرف 24 * 24mm آهي، M5Stack ڊولپمينٽ کٽ سيريز ۾ سڀ کان وڌيڪ ڪمپيڪٽ ڊولپمينٽ بورڊ آهي. اهو وڌيڪ GPIO پن مهيا ڪري ٿو ۽ آسان ۽ ننڍڙي ايمبيڊڊ ڊيوائس ڊولپمينٽ لاءِ تمام موزون آهي.
مکيه ڪنٽرول ESP32-PICO-D4 چپ کي اختيار ڪري ٿو، جيڪو وائي فائي ۽ بلوٽوٿ ٽيڪنالاجيز سان ضم ٿئي ٿو ۽ انٽيگريٽيڊ SPI فليش ميموري جو 4MB آهي. ايٽم بورڊ پينل تي 5 * 5 RGB LED ميٽرڪس سان گڏ هڪ انفرا-ريڊ LED مهيا ڪري ٿو، هڪ بلٽ ان IMU سينسر (MPU6886)، ۽ هڪ HY2.0 انٽرفيس. ھڪڙو عام مقصد وارو پروگرام بٽڻ ھيٺ ڏنل آھي RGB Led matrix جي ھيٺان صارفين کي انھن جي مختلف منصوبن ۾ ان پٽ سپورٽ شامل ڪرڻ جي قابل ڪرڻ لاءِ. آن بورڊ يو ايس بي انٽرفيس (قسم-سي) تيزيءَ سان پروگرام اپلوڊ ڪرڻ ۽ عمل ڪرڻ جي قابل بنائي ٿو. ھڪڙي M2 اسڪرو سوراخ بورڊ تي چڙھڻ لاء پوئتي تي مهيا ڪيل آھي.
نوٽ: جڏهن مينيپوليٽر استعمال ڪريو، مھرباني ڪري ھيريئر جي آخر ۾ فرم ویئر کي ATOM تي ساڙڻ کان پاسو ڪريو. ڊوائيس صرف اسان جي اصل firmware کي سپورٽ ڪري ٿو.
مھرباني ڪري مھرباني ڪري توھان جي تڪليف کي سمجھو.
3.1.2.1 خاصيتون
- ESP32 PICO تي ٻڌل
- پروگرامن وارو بٽڻ
- 5*5 RGB LED ميٽرڪس پينل (WS2812C)
- بلٽ ان انفرا ريڊ LED
- بلٽ ان MPU6886 Inertial sensor
- وڌايل پن ۽ سوراخ
- پروگرام پليٽ فارم: Arduino UIFlow
3.1.2.2 وضاحت
| وسيلا | پيرا ميٽر |
| اي ايسڪسڪسينڪس | 240MHz ٻٽي-ڪور، 600 DMIPS، 520KB SRAM، وائي فائي، ٻٽي موڊ بلوٽوت |
| چمڪ | 4 ايم بي |
| پاور ان پٽ | 5V @ 500mA |
| بندرگاهه | ٽائپ سي x 1، گروو (I2C+I/0+UART) x 1 |
| PIN انٽرفيس | جي 19، جي 21، جي 22، جي 23، جي 25، جي 33 |
| RGB LED | WS2812C 2020 x 25 |
| ايم ايم ايس | ايم پي يو 6886 |
| IR | انفراريڊ ٽرانسميشن |
| بٽڻ | حسب ضرورت هيٺيون x 1 |
| اينٽينا | 2.4G 3D اينٽيننا |
| آپريٽنگ جي درجه حرارت | 32°F کان 104°F (0°C کان 40°C) |
| خالص وزن | 3g |
| مجموعي وزن | 14 جي |
| پيداوار جي ماپ | 24 x 24 x 14 ملي ميٽر |
| پيڪيج جي ماپ | 24 x 24 x 14 ملي ميٽر |
| ڪيس مواد | پلاسٽڪ (PC) |
3.1.3 سرو موٽر
myCobot شيئر ڪري ٿو 6 اعليٰ ڪارڪردگي سرووسوس 6 جوائنٽ ۾ ايڊوان سانtagتيز ردعمل، ننڍي جڙت، هموار گردش، مستحڪم ٽوڪ، وغيره.
| وسيلا | پيرا ميٽر |
| ماپ | 23.2*12.1*28.5mm |
| پاور ان پٽ | 4.8~7.4V |
| آپريٽنگ جي درجه حرارت | -15 ~ 70 ° |
| درجه بندي torque | 1.5kg.cm@6V |
| اسٽال ٽوڪ | 4.5kg.cm@6V |
| گردش زاويه | 300 ° (زاويو سافٽ ويئر طرفان محدود ٿي سگهي ٿو) |
3.2 مشيني ڍانچي
3.2.1 سائيز ۽ ڪم جي حد
الف) ميڪوبيوٽا
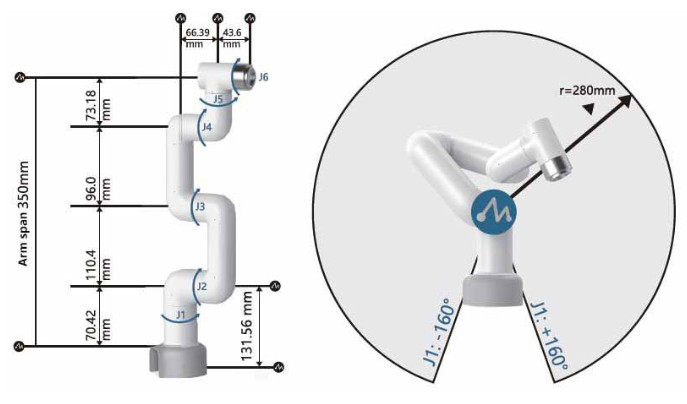
myCobot - تحريڪ جي گڏيل حد جو جدول
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
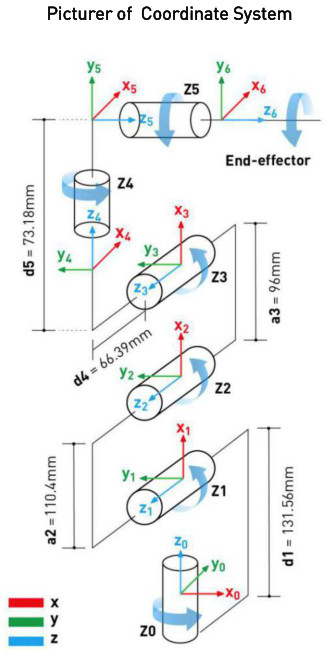
ڪوآرڊينيٽ سسٽم جو تصوير
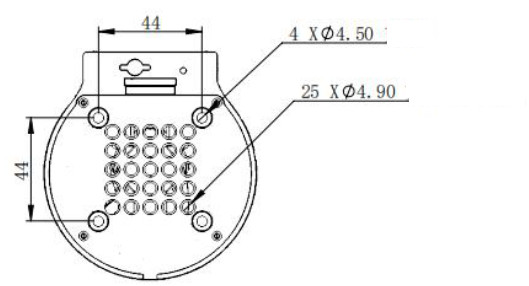
ب) بيس اسيمبلي
بنياد ٻنهي ليگو-ٽيڪڪ جزو سوراخ ۽ ذريعي-سوراخ اسڪرو سوراخ سان هم آهنگ آهي.
ج) آخر اسيمبلي
آخر ٻنهي ليگو-ٽيڪڪ جزو سوراخ ۽ سکرو موضوع سان مطابقت رکي ٿو.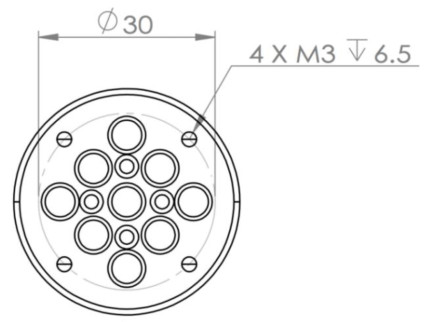
3.2.2 پيڪنگ ۽ انسٽال ڪرڻ
3.2.2.1 کولڻ
نوٽ: پيڪنگنگ باڪس جي جاء تي ٿيڻ کان پوء، مهرباني ڪري تصديق ڪريو ته روبوٽ پيڪنگنگ برقرار ۽ غير محفوظ آهي. جيڪڏھن ڪو نقصان آھي، مھرباني ڪري وقت ۾ لوجسٽڪ ڪمپني ۽ مقامي سپلائر سان رابطو ڪريو. پيڪنگ ڪرڻ کان پوء، مھرباني ڪري چيڪ ڪريو اصل شيون دٻي ۾ شيون لسٽ مطابق.

| myCobot【معياري سيٽ】 | -myCobot-280 - بروشر -بجلي جي فراهمي -USB-قسم سي - جمپر -M4 * 35، اسٽينلیس سٹیل سکرو - مسدس رينچ |
مھرباني ڪري روبوٽ سسٽم کي ھڪڙي ماحول ۾ انسٽال ڪريو جيڪو ميز ۾ بيان ڪيل شرطن کي پورو ڪرڻ لاء مشين جي ڪارڪردگي کي برقرار رکڻ ۽ ان کي محفوظ طور تي استعمال ڪرڻ لاء.
آپريٽنگ ماحول ۽ حالتون
| گرمي پد | -10 ℃ ~ 45 ℃ |
| نسبتي نمي | 20% ~ 70% |
| انڊور/ آئوٽ ڊور | اندريون |
| ٻي ماحولياتي گهرج | - سج جي روشني کان بچڻ. - مٽي، تيل واري دونھون، لوڻ، لوڻ جي فلنگ وغيره کان پري رکو. - ٻرندڙ ۽ corrosive مائع ۽ گيس کان پري رکو. - پاڻي سان رابطو نه ڪريو. - جھٽڪو، وائبريشن وغيره منتقل نٿو ڪري. مضبوط برقي مقناطيسي مداخلت جي ذريعن کان پري رکو. |
3.2.2.2 تنصيب
ميڪوبيوٽا تعاون ڪندڙ روبوٽ جو اصل وزن 850 گرام آهي. روبوٽ جي حرڪت تي غور ڪندي، ڪشش ثقل جو مرڪز حرڪت ڪندو جيئن روبوٽ حرڪت ڪندو. تنهن ڪري، روبوٽ کي عام طور تي استعمال ڪرڻ لاء هڪ مضبوط بنياد تي مقرر ڪيو وڃي.
روبوٽ بيس جي انٽرفيس سائيز: پيڊل فڪسنگ هول اهو انٽرفيس آهي جيڪو روبوٽ کي ٻين بيسز يا جهازن تي درست ڪري ٿو. مخصوص سوراخ جي ماپ هيٺ ڏنل ڏيکاريل آهي. اهو 4 سوراخ ذريعي 4.5mm جي قطر سان آهي، جنهن کي M4 بولٽ سان مقرر ڪري سگهجي ٿو.
پڪ ڪريو ته انسٽال ڪرڻ کان پهريان مقرر ٿيل بنياد تي هڪ لاڳاپيل موضوع وارو سوراخ آهي. توھان کان پھريان رسمي طور تي انسٽال ڪريو، مھرباني ڪري تصديق ڪريو:
- نصب ٿيڻ جو ماحول مٿي ڏنل گهرجن سان مطابقت رکي ٿو.
- انسٽاليشن پوزيشن روبوٽ جي ڪم ڪندڙ حد کان گهٽ ناهي، ۽ ڪافي جاء آهي
تنصيب، استعمال، سار سنڀال ۽ مرمت لاءِ. - اسٽينڊ کي مناسب پوزيشن ۾ رکو.
- انسٽاليشن سان لاڳاپيل اوزار تيار آهن، جهڙوڪ اسڪرو، رنچ، وغيره.
مٿي تصديق ڪرڻ کان پوءِ، روبوٽ کي بيس جي چڙهندڙ مٿاڇري تي منتقل ڪريو، روبوٽ جي پوزيشن کي ترتيب ڏيو، ۽ روبوٽ بيس جي فڪسنگ سوراخ کي بيس جي چڙهندڙ مٿاڇري تي سوراخ سان ترتيب ڏيو.
نوٽ: جڏهن چڙهڻ واري بيس تي روبوٽ جي پوزيشن کي ترتيب ڏيو، مهرباني ڪري ڇڪڻ کان بچڻ لاءِ روبوٽ کي سڌو سنئون بيس جي چڙهندڙ مٿاڇري تي دٻائڻ کان پاسو ڪريو. جڏهن روبوٽ کي دستي طور تي منتقل ڪيو وڃي، مهرباني ڪري روبوٽ کي غير ضروري نقصان کان بچڻ لاءِ روبوٽ جي جسم جي ڪمزور حصي تي بيروني قوت لاڳو ڪرڻ کان پاسو ڪرڻ جي ڪوشش ڪريو.
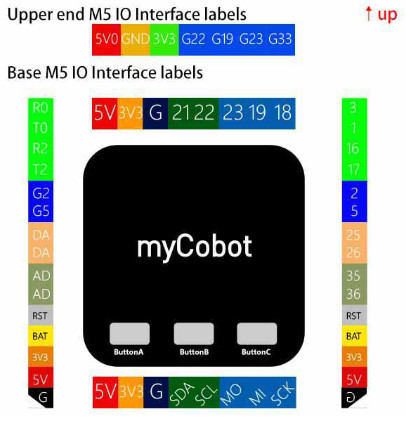
3.3 اليڪٽرانڪس ۽ اليڪٽريڪل
myCobot ٽي خارجي ٽرمينل آهن. اهي آهن بيس تي M5Stack Basic جا خارجي ٽرمينل، پاور ساڪٽ جي ويجهو ٻه گروو ٽرمينل ۽ M5Stack Atom J6 جوائنٽ جا خارجي ٽرمينل پن.
a)M5STACK بنيادي برقي ڊراگرام

ب) M5STACK ايٽم سرڪٽ ڊاگرام
ج) IO انٽرفيس ڊراگرام
سافٽ ويئر
سافٽ ويئر اپڊيٽ لاء، مهرباني ڪري چيڪ ڪريو اسان جي Github پهرين. https://github.com/elephantrobotics/myCobot
4.1 فرم ويئر اپ گريڊ ۽ بحالي - منهنجو اسٽوڊيو
منهنجو اسٽوڊيو منهنجي روبوٽ/مائڪوبيوٽا جي روبوٽس لاءِ هڪ اسٽاپ پليٽ فارم آهي.
منهنجي اسٽوڊيو جا مکيه ڪم آهن: 1) فرم ویئر کي اپڊيٽ ڪريو؛ 2) روبوٽ کي ڪيئن استعمال ڪجي وڊيو سبق مهيا ڪريو؛ 3) سار سنڀال ۽ مرمت جي معلومات مهيا ڪريو (جهڙوڪ وڊيو سبق، سوال ۽ جواب، وغيره).
myStudio بابت يوٽيوب وڊيوز جي لنڪ هي آهي: https://youtu.be/Kr9i62ZPf4w
جيڪڏهن توهان کي اپ گريڊ ڪرڻ جي ضرورت آهي يا توهان جي ميڪوبيوٽا کي برقرار رکڻ جي ضرورت آهي، پڪ ڪريو ته ترقي وارو ماحول قائم ڪيو ويو آهي. جيڪڏهن نه، مهرباني ڪري انسٽال ڪريو سيريل پورٽ ڊرائيور پهريان ۽ پوءِ ڪوشش ڪريو سافٽ ويئر استعمال ڪرڻ جي. ڊائون لوڊ لنڪ هن ريت آهي:
سرڪاري webسائيٽ: https://www.elephantrobotics.com/myCobot/
گيتب: https://github.com/elephantrobotics/MyStudio/
جيڪڏهن توهان ونڊوز سسٽم استعمال ڪريو ٿا، مهرباني ڪري ڊائون لوڊ ڪرڻ لاءِ "my studio-windows.exe" چونڊيو، ۽ پوءِ ان کي پنهنجي پروجيڪٽ فولڊر ۾ ان زپ ڪريو. محتاط رھو ته ان کي پيچيده رستن سان استعمال نه ڪريو، جيڪي اڻ سڃاتل رستن سان مسئلا پيدا ڪري سگھن ٿا.
جيڪڏهن توهان جي ترقي جو ماحول اڳ ۾ ئي قائم ڪيو ويو آهي، توهان سڌو ڪري سگهو ٿا کوليو file "myCobot. exe“.
کولڻ کان پوء، انٽرفيس هيٺ ڏنل آهي: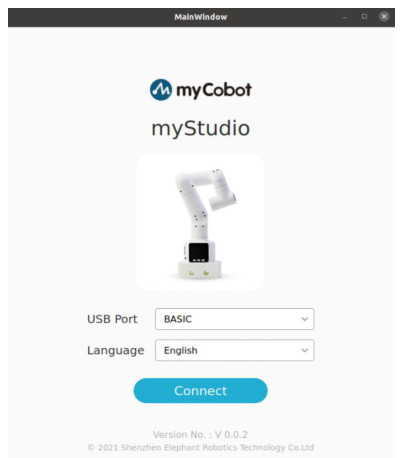
پنهنجي myCobot کي ”بنيادي“ يا ”ايٽم“ سان ڳنڍيو، ”ٻولي“ چونڊيو ۽ پوءِ مکيه انٽرفيس داخل ڪرڻ لاءِ ”ڪنيڪٽ“ تي ڪلڪ ڪريو هيٺ ڏيکاريل آهي: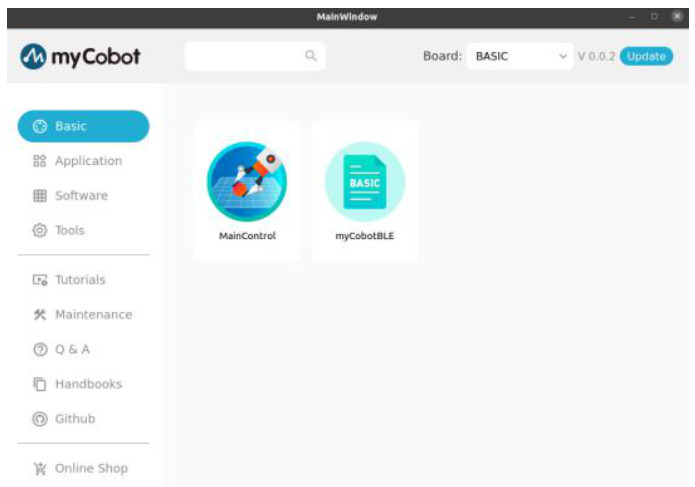
جيڪڏهن توهان بنيادي ۽ ائٽم ٻنهي کي ڳنڍيو ٿا، اهو سافٽ ويئر چونڊيو جيڪو توهان ٻيهر ساڄي ڪنڊ ۾ بورڊ بار ۾ ساڙڻ چاهيو ٿا، ۽ پوءِ ڪلڪ ڪريو بنيادي يا اوزار چونڊڻ لاءِ جيڪو توهان ساڙڻ چاهيو ٿا.
4.2 بلٽ ان ٽريڪ رڪارڊنگ
M5STACK بنيادي مين ڪنٽرول بورڊ وٽ 3 بٽڻ آھن جيڪي ڪسٽم پروگرامنگ ۽ ڊيٽا لکڻ جي حمايت ڪن ٿيون. هي پروگرام کليل ذريعو آهي، توهان چيڪ ڪري سگهو ٿا اسان جي GitHub.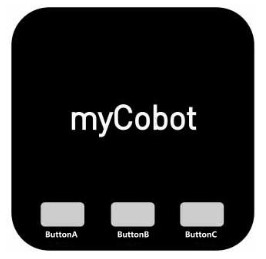
ڇڪڻ تدريس جو مظاهرو
- رڪارڊنگ: رڪارڊنگ موڊ ۾ داخل ٿيڻ کان پوء، رڪارڊنگ اسٽوريج جي جڳھ کي چونڊيو

بٽڻ A: اسٽور کي رام
بٽڻ ب: اسٽور کان ميموري ڪارڊ
بٽڻ سي: رڪارڊنگ موڊ مان نڪرڻ - رڪارڊنگ شروع ڪريو

اسٽوريج جي جڳھ کي چونڊڻ کان پوء، ھدف واري عمل کي مڪمل ڪرڻ لاء دستي طور تي روبوٽڪ بازو کي ڇڪيو، پوء عمل کي رڪارڊ ڪيو ويندو ۽ ذخيرو ڪيو ويندو. - راند

بٽڻ A: رڪارڊ ٿيل عمل کيڏڻ شروع ڪريو
بٽڻ ب: روڪيو
بٽڻ سي: پلے بيڪ مان نڪرڻ
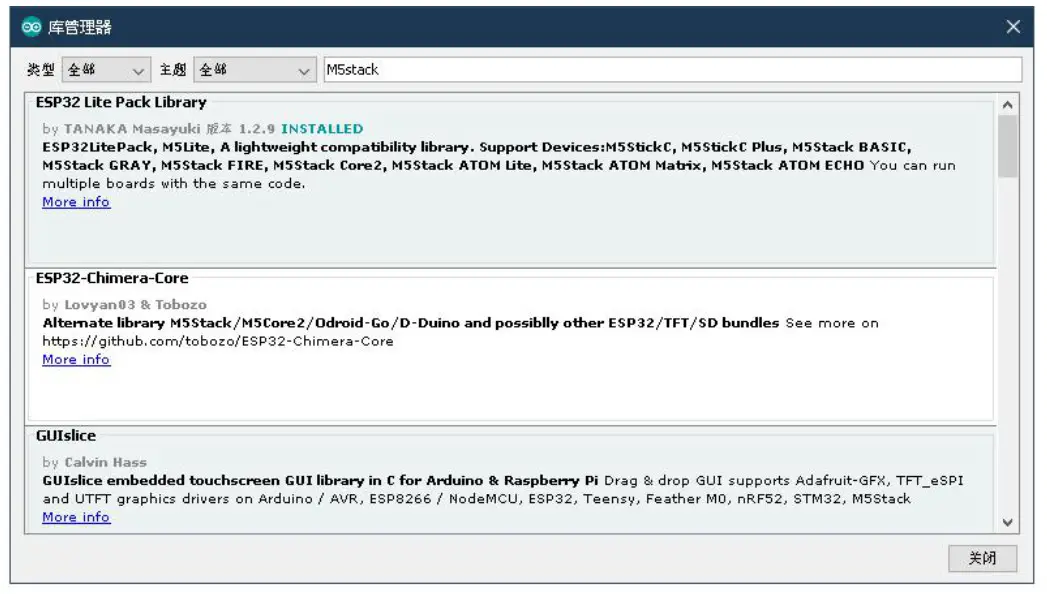
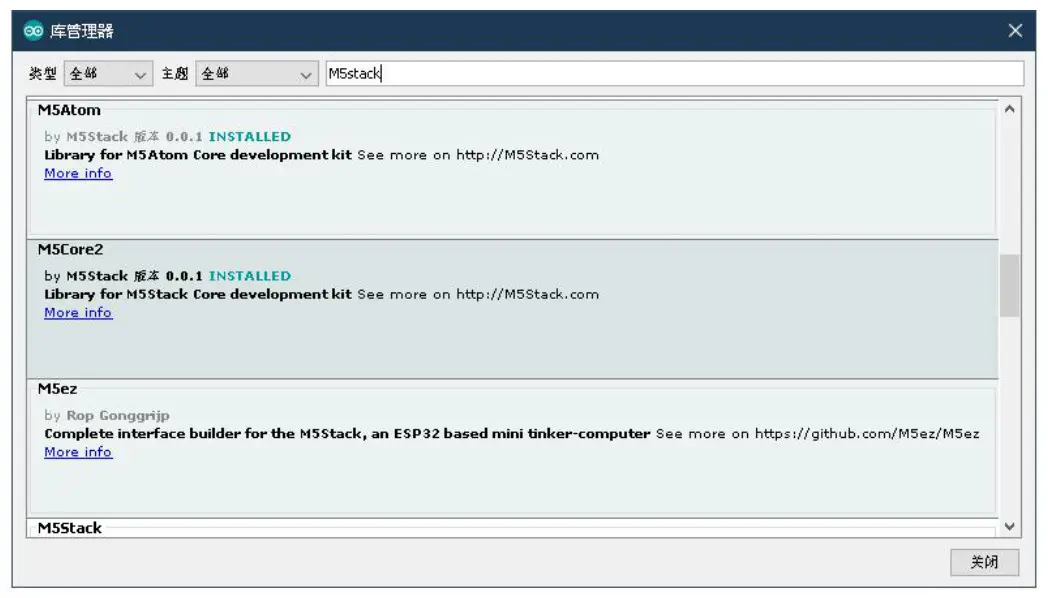
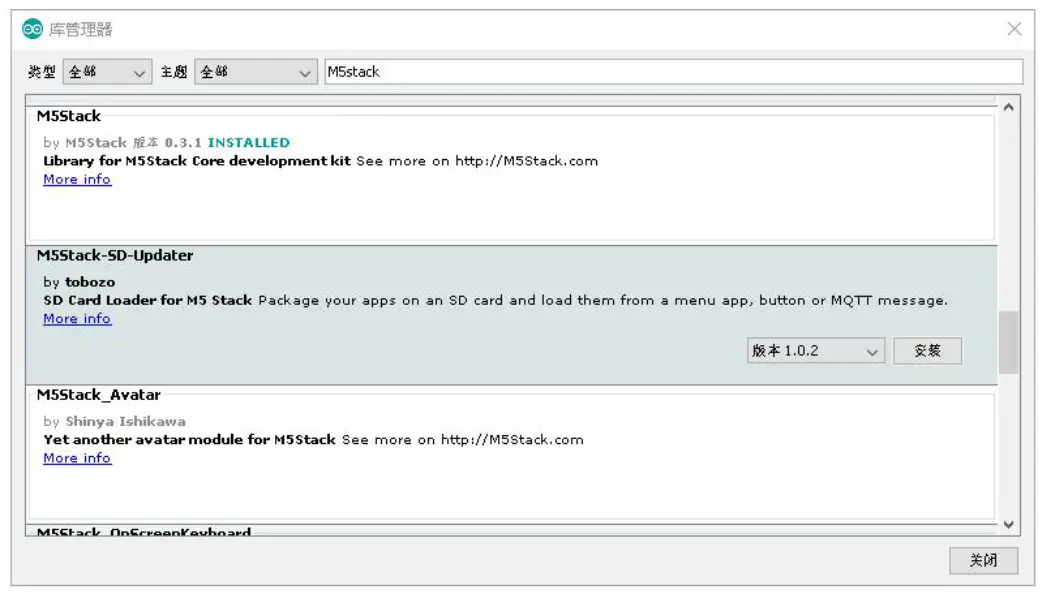
4.3 Arduino لائبريريون
لائبريري ڪوڊس جو هڪ مجموعو آهي جيڪو توهان کي آساني سان ڳنڍڻ ۽ استعمال ڪرڻ جي اجازت ڏئي ٿو سينسر، ڊسپلي، ماڊلز وغيره.ampلي، ٺهيل LiquidCrystal لائبريري ڪردار LCD ڊسپلي سان آسان رابطي کي محسوس ڪري سگهي ٿي.
لائبريري استعمال ڪندي Arduino ڊولپمينٽ بورڊ جا ڪم وڌائي سگھجن ٿا. لائبريري جي ڪري، اسان آساني سان Arduino ۽ ٻاهرين هارڊويئر يا ڊيٽا ڪميونيڪيشن جي وچ ۾ تعاون کي محسوس ڪري سگهون ٿا. Arduino IDE معياري لائبريري جي هڪ سيريز سان اڳ ۾ نصب ٿيل آهي fileايس. ساڳئي وقت، توهان پڻ نصب ۽ درآمد ڪري سگهو ٿا ٽئين پارٽي لائبريريون (جهڙوڪ انٽرنيٽ تان ڊائونلوڊ ڪيل اوپن سورس لائبريريون) Arduino IDE ۾. توهان شايد لائبريريون ٺاهي سگهو ٿا ۽ انهن کي Arduino IDE ۾ درآمد ڪري سگهو ٿا. لائبريري جو وجود صارفين کي وڌيڪ خاص مواد کي نظرانداز ڪرڻ ۾ مدد ڪري ٿو جهڙوڪ رجسٽر ۽ ايڊريس پوائنٽرز، ترقي جي مشڪلات کي تمام گهڻو گھٽائي ٿو. جيڪڏهن توهان کي ڄاڻڻ جي ضرورت آهي ته ARDUINO IDE جي انسٽاليشن لاءِ ٽئين پارٽي لائبريريون ڪيئن شامل ڪيون وڃن، مهرباني ڪري ڊرائيور جي انسٽاليشن ايڊريس ۽ طريقو ڏسو: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development توهان پڻ چيڪ ڪري سگهو ٿا اسان جي Github وڌيڪ معلومات لاء. https://github.com/elephantrobotics/myCobot
توهان پڻ چيڪ ڪري سگهو ٿا اسان جي Github وڌيڪ معلومات لاء. https://github.com/elephantrobotics/myCobot
جيئن ته:
4.4 API انٽرفيس ۽ ڪميونيڪيشن
- UNIFLOW
- آرڊينو
- مائڪرو پٿون
- FreeROTS
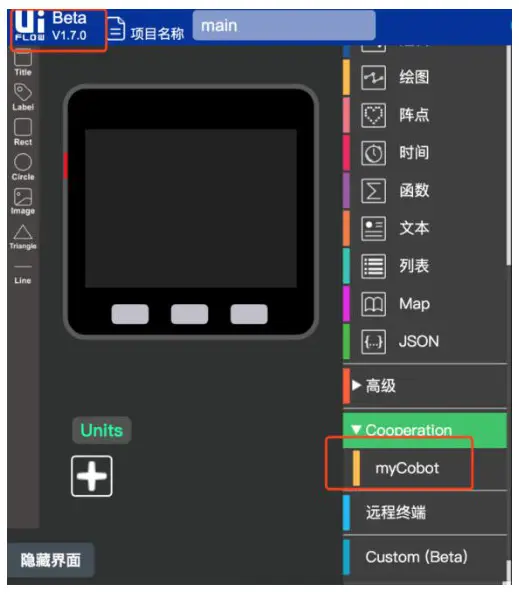
4.4.1 UIFlow
UIFlow بيٽا ورزن استعمال ڪريو ۽ تعاون چونڊيو - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS ترقي هيٺ آهي ۽ ترقي جي مطابق اپڊيٽ ڪيو ويندو.
12.31 تائين:
- ROS سيٽ اپ کي اپڊيٽ ڪيو ته پوء يا ته Python2 يا 3 هاڻي انسٽال ڪري سگھن ٿا.
- تبديل ڪريو دستي طور تي سيريل پورٽ داخل ڪرڻ بدران، تنهنڪري ونڊوز استعمال ڪندڙ سڌو هلائي سگهن ٿا.
- تازه ڪاري ڪريو نئون انٽرفيس وضاحتي دستاويز API لائبريري ۾، مهرباني ڪري ڏسو ”README“.
- 4.6 گڏيل حساب ڪتاب
جيڪڏھن توھان جي موبٽ کي ضرورت آھي جوڑوں جي حساب سان، مھرباني ڪري استعمال ڪريو فرم ويئر جو mycobiota يا Arduino ۽ ٻيا اوزار استعمال ڪريو Calibration کي ساڙڻ لاءِ.
firmware کي اپلوڊ ڪرڻ کان پوء، بنيادي انٽرفيس هيٺ ڏيکاريل آهي:
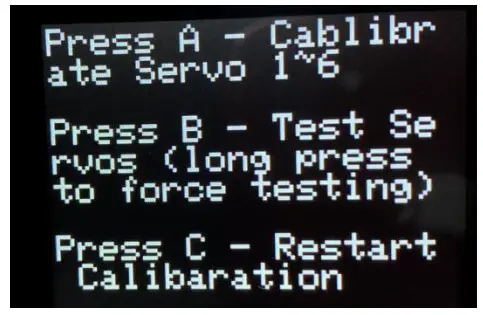
ھن وقت، J1 کي گھمايو معياري صفر پوزيشن ڏانھن نالي سان ترتيب ڏيڻ، ۽ A بٽڻ کي دٻايو (کاٻي بٽڻ)، پوء J1 ھڪڙي متحرڪ حرڪت کان جامد پوزيشن ڏانھن ويندي ۽ ھن معياري صفر پوزيشن ڏانھن مقرر ڪيو ويندو.
باقي J2-J6 سيٽ اپ ڪرڻ لاء هن طريقي جي پٺيان قدمن کي ورجايو. J6 سيٽ ٿيڻ کان پوء، سڀني سيٽنگن کي بچائڻ لاء A ڪي (کاٻي ڪيٻي) کي ٻيهر دٻايو.
جڏهن سڀئي جوڙا واپس معياري صفر پوزيشن تي آهن، توهان کي اهو پڻ جانچڻ جي ضرورت آهي ته ڇا myCobot عام طور تي ڪم ڪري سگهي ٿو. بي بٽڻ کي دٻايو (وچين بٽڻ)، پوء منهنجو روبوٽ ترتيب ۾ J1 کان J6 معلوم ڪندو.
مھرباني ڪري پڪ ڪريو ته آپريٽنگ رينج جي اندر ڪا به رڪاوٽ يا عملي جي مداخلت نه آھي ته جيئن جاچ دوران سامان ۽ عملدار کي نقصان پھچائي سگھجي.
بصري پروگرامنگ ۽ صنعتي سافٽ ويئر
5.1 بصري پروگرامنگ سافٽ ويئر-UIFlow
تفصيلي استعمال لاءِ، مھرباني ڪري ھيٺ ڏنل لنڪ تان UI فلو آپريشن مينوئل حاصل ڪريو.
M5STACK بنيادي: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5 اسٽيڪ ايٽم: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 صنعتي بصري پروگرامنگ سافٽ ويئر-RoboFlow
myCobot Elephant Robotics صنعتي تعاون ڪندڙ روبوٽس پاران هلندڙ RoboFlow کي سپورٽ ڪري ٿو. RoboFlow جي آپريشن جو عمل سادو ۽ استعمال ڪرڻ ۾ آسان آھي، ۽ انٽرفيس صاف ۽ سمجھڻ ۾ آسان آھي، جيڪو صارفن لاءِ آسانيءَ سان مھارت ۽ استعمال ڪرڻ ۾ آسان آھي، ۽ مؤثر طريقي سان صارفين کي آپريشنز ۽ پروگرامنگ جي ڪمن کي موثر طريقي سان مڪمل ڪرڻ ۾ مدد ڪري ٿو. جيتوڻيڪ نوان استعمال ڪندڙ پڻ آسان آپريشن ذريعي ٽارگيٽ افعال حاصل ڪري سگھن ٿا.
تفصيلي استعمال لاءِ، مھرباني ڪري ھيٺ ڏنل لنڪ تان روبو فلو آپريشن مينوئل حاصل ڪريو.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
بعد-سيلز سروس
- واپسي جي خدمت سامان تائين محدود آهي 7 ڏينهن اندر نه کوليو پراڊڪٽس جي رسيد جي تاريخ کان پوءِ. واپسي ۾ خرچ ٿيل مال يا ٻيا خطرا گراهڪ طرفان برداشت ڪيا ويندا.
- گراهڪ کي خريد ڪرڻ جي انوائس ۽ وارنٽي ڪارڊ مهيا ڪرڻ گهرجن جيئن وارنٽي سرٽيفڪيشن جڏهن وارنٽي طلب ڪئي وڃي.
- Elephant Robotics وارنٽي جي مدت دوران عام استعمال جي ڪري مصنوعات جي هارڊويئر جي خرابين لاء ذميوار هوندا.
- وارنٽي جي مدت خريداري جي تاريخ يا رسيد جي تاريخ کان شروع ٿئي ٿي.
- پروڊڪٽس جا ناقص حصا ايلفينٽ روبوٽڪس جي ملڪيت هوندا، ۽ جيڪڏهن ضروري هجي ته مناسب قيمت وصول ڪئي ويندي.
جيڪڏهن توهان کي وارنٽي سروس لاءِ درخواست ڏيڻ جي ضرورت آهي، مهرباني ڪري تفصيلي معلومات جي تصديق ڪرڻ لاءِ پهريان اسان جي ڪسٽمر سروس سان رابطو ڪريو. هيٺ ڏنل تفصيلي اجزاء جي وارنٽي شرطون آهن:
نوٽ: جيڪڏهن پراڊڪٽ بروشر سان تڪرار آهي، صارف دستياب غالب هوندو.
a) سيور موٽر
| وارنٽي جي مدت | وارنٽي خدمتون |
| ≤1 مهينو | Elephant Robotics هڪ مفت نئين سيور موٽر پيش ڪري ٿو ۽ سامان کڻندو آهي. |
| 1-3 مهينا | Elephant Robotics پيش ڪري ٿو مفت نئين سيور موٽر، ڪسٽمز کي سامان کڻڻو پوندو |
| ≥3 مهينا | صارفين کي ان کي پاڻ خريد ڪرڻ جي ضرورت آهي. |
ب) بجلي جا حصا (M5 هارڊويئر)
| وارنٽي جي مدت | وارنٽي خدمتون |
| ≤3 مهينا | گراهڪ کي ان کي الڳ ڪرڻ کان پوءِ واپس موڪلڻ جي ضرورت آهي، Elephant Robotics هڪ نئون موڪليندو مفت ۾ ۽ سامان کڻڻ ۽ گهر کان ٻاهر. |
| 3-6 مهينا | گراهڪن کي ان کي واپس موڪلڻ جي ضرورت آهي disassembly کان پوء ۽ سامان کڻڻ ۽ گهر کان ٻاهر، Elephant Robotics هڪ نئون موڪليندو مفت ۾. |
| ≥6 مهينا | صارفين کي ان کي پاڻ خريد ڪرڻ جي ضرورت آهي. |
ج) ساخت جا حصا، شيل حصن سميت
| وارنٽي جي مدت | وارنٽي خدمتون |
| ≤1 سال | Elephant Robotics هڪ ڀيرو مفت نوان جزا پيش ڪري ٿو، ڪسٽمز سامان کڻندو. |
| ≥1 سال | صارفين کي ان کي پاڻ خريد ڪرڻ جي ضرورت آهي. |
پهچائڻ واري پراڊڪٽ جي وارنٽي مدت دوران، ڪمپني صرف انهن خرابين جي مرمت ڪري ٿي جيڪا روبوٽ جي عام استعمال دوران ٿيندي آهي مفت ۾. بهرحال، هيٺين صورتن ۾، گراهڪ کي مرمت لاء چارج ڪيو ويندو (جيتوڻيڪ وارنٽي جي مدت دوران):
- دستي کان مختلف غلط استعمال ۽ غلط استعمال جي ڪري نقصان يا خرابي.
- ڪسٽمر طرفان غير مجاز ڌار ڪرڻ جي سبب ناڪامي.
- غلط ترتيب يا غير مجاز مرمت جي ڪري نقصان.
- نقصان قدرتي آفتن جهڙوڪ زلزلو ۽ ٻوڏ جي ڪري ٿئي ٿو.
مھرباني ڪري روبوٽ کي هلائڻ لاءِ ھن دستور ۽ لاڳاپيل مينوئل ۾ ڏنل ھدايتن تي سختي سان عمل ڪريو.
سوال ۽ جواب:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
عبرت: مرتب ڪندڙ لاڳاپيل ڊوائيس نه ڳولي سگهيو؟
ج: ڊوائيس صرف ترقي واري ماحول کي ترتيب ڏيڻ ۽ لاڳاپيل پروجيڪٽ لائبريري کي نصب ڪرڻ کان پوء ترقي ڪري سگهجي ٿو.
سوال: مرتب ڪندڙ ص کي مرتب نه ڪري سگهيوampلي پروگرام صحيح طرح سان لاڳاپيل ڊوائيس ڳولڻ لاء؟
ج: گھربل پراجيڪٽ لئبرري انسٽال ٿيل نه آھي يا پروجيڪٽ لئبريري سان ٽڪراءُ آھي. مھرباني ڪري چيڪ ڪريو ته پروجيڪٽ لائبريري صحيح طور تي نصب ٿيل آھي پھريون. جيڪڏهن اهو صحيح طور تي نصب ڪيو ويو آهي ut اڃا تائين گڏ نه ٿو ڪري سگھجي، مهرباني ڪري ٻيهر انسٽال ڪريو Arduino ترقياتي ماحول.
سوال: ATOM ۾ فرم ویئر کي ساڙڻ کان پوءِ ڊوائيس صحيح طريقي سان ڪم ڪرڻ ۾ ناڪام ٿيو؟
ج: ATOM ٽرمينل لاءِ فرمائيندڙ اسان جي ڪارخاني واري فرم ویئر کي استعمال ڪرڻ جي ضرورت آهي. جيڪڏهن ڪو ٻيو فرم ویئر اتفاقي طور تي ساڙيو ويو آهي، توهان ATOM ٽرمينل کي ساڙڻ لاءِ ”myCobot ATOM ATOMMAIN چونڊ ڪري سگهو ٿا.
سوال: عمودي پوزيشن ۾ ٿورو ڊگھو آهي پر حرڪت واري حالت ۾ نه؟
ج: مهرباني ڪري چيڪ ڪريو ته منهنجو روبوٽ عمودي حالت ۾ آهي. mycobiota عمودي حالت ۾ ڪشش ثقل کان متاثر نه ٿيندو آهي، مشيني ويڪرائي ننڍا ننڍا ڦڙا پيدا ڪري سگهي ٿي. پر اتي wobbles نه ٿيندو جڏهن اهو عمودي رياست کان ٻاهر آهي. سفارش ٿيل رفتار عمودي حالت ۾ 400-500 آهي.
عبرت: ڇا ROS سسٽم بعد ۾ چارج ڪندو؟
A: ROS کليل ذريعو آهي ۽ اسان جي Github ڏانهن اپڊيٽ ڪيو ويندو. فرم ويئر اپ گريڊ لاء ڪو به چارج ناهي.
اسان سان رابطو ڪريو
جيڪڏھن توھان کي ڪنھن مدد جي ضرورت آھي، مھرباني ڪري اسان سان رابطو ڪريو ھيٺ ڏنل ڏيکاريل آھي.
Shenzhen Elephant Robotics Technology Co., Ltd
ائڊريس: B7، Yungu Innovative Industrial Park 2، Nanshan، Shenzhen، China
اي ميل: support@elephantrobotics.com
فون: +86(0755)-8696-8565 (ڪم ڪندڙ ڏينهن 9:30-18:30)
Webسائيٽ: www.elephantrobotics.com
Twitter: CobotMy

دستاويز / وسيلا
 |
Elephant Robotics MyCobot Six-Axis collaborative Robot Arm [pdf] استعمال ڪندڙ دستياب MyCobot، ڇهه-محور تعاون ڪندڙ روبوٽ بازو، MyCobot ڇهه-محور تعاون ڪندڙ روبوٽ بازو، V20210309 |



