Danfoss Compliant EMD Speed Direction Function Block
သတ်မှတ်ချက်များ
- ကုန်ပစ္စည်းအမည်- PLUS+1 လိုက်လျောညီထွေဖြစ်သော EMD မြန်နှုန်းအာရုံခံကိရိယာ လမ်းညွှန်လုပ်ဆောင်ချက် ပိတ်ဆို့ခြင်း။
- အထွက်- RPM နှင့် ဦးတည်ချက်အချက်ပြမှုများ
- input range:
- မြန်နှုန်း (Spd) : 1,250 မှ 10,000,000
- လမ်းကြောင်း (Dir In): 0 မှ 5,250 ဗို့
ထုတ်ကုန်အသုံးပြုမှု ညွှန်ကြားချက်များ
Controller Configurations
EMD_SPD_DIR Function Block သည် EMD Speed Sensor မှထည့်သွင်းမှုများအပေါ်အခြေခံ၍ rpm နှင့် directional signal များကိုထုတ်ပေးပါသည်။ ၎င်းကို MC နှင့် SC controller နှစ်ခုလုံးတွင် အသုံးပြုနိုင်သည်။
Controller Input လိုအပ်ချက်များ
EMD SPD DIR လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းအတွက် ထိန်းချုပ်ကိရိယာထည့်သွင်းမှုလိုအပ်ချက်များမှာ အောက်ပါအတိုင်းဖြစ်သည်-
- MC ထိန်းချုပ်သူများ-
- Spd – MFIn – DirIn
- SC ထိန်းချုပ်ကိရိယာများ-
- Spd – MFin – DirIn – DigAn
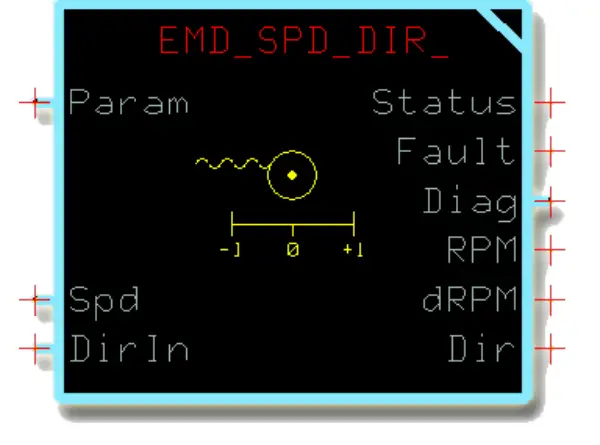
Function Block Inputs
EMD_SPD_DIR Function Block ထည့်သွင်းမှုများမှာ အောက်ပါအတိုင်းဖြစ်သည်-
- Spd (အမြန်နှုန်း) Bus Per U32 Count U16 – Range-
၅း၄၅ - Dir In (လမ်းညွှန်): ဘတ်စ်ကား Volt/Voltagအီး U16 –
အတိုင်းအတာ- 0 မှ 5,250 ဗို့
Function Block Outputs
EMD_SPD_DIR Function Block ရလဒ်များသည် အောက်ပါအတိုင်းဖြစ်သည်-
- အခြေအနေ- U16 – အပိုင်းအခြား- 0 မှ 65,535
- အမှား- U16 – အပိုင်းအခြား- 0 မှ 1,000,000,000
- RPM- U16 – အပိုင်းအခြား- 0 မှ 25,000
- dRPM- U16 – အပိုင်းအခြား- 0 မှ 2,500
- ဒါရိုက်တာ S8 – တန်ဖိုးများ- -1၊ 0၊ +1
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
- EMD_SPD_DIR Function Block ၏ ရည်ရွယ်ချက်ကား အဘယ်နည်း။
EMD_SPD_DIR Function Block သည် EMD Speed Sensor မှထည့်သွင်းမှုများအပေါ်အခြေခံ၍ rpm နှင့် directional signal များကိုထုတ်ပေးပါသည်။ - MC Controllers ပေါ်ရှိ EMD_SPD_DIR လုပ်ဆောင်ချက် ပိတ်ဆို့ခြင်းအတွက် ထည့်သွင်းရန် လိုအပ်ချက်များကား အဘယ်နည်း။
MC Controllers အတွက် ထည့်သွင်းရန် လိုအပ်ချက်များမှာ Spd၊ MFIn နှင့် DirIn ဖြစ်သည်။ - Vol ကဘာလဲtagEMD_SPD_DIR Function Block ၏ Direction input (Dir In) အတွက် e range
voltagDirection input အတွက် e range သည် 0 မှ 5,250 ဗို့ ဖြစ်သည်။
ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
ပြန်လည်ပြင်ဆင်မှုဇယား
| ရက်စွဲ | ပြောင်းသွားတယ်။ | ဗျာ၊ |
| ဒီဇင်ဘာလ 2014 | AA |
EMD_SPD_DIR လုပ်ဆောင်ချက် ပိတ်ဆို့ခြင်း။
ကျော်view
ဤလုပ်ဆောင်ချက်သည် EMD မြန်နှုန်းအာရုံခံကိရိယာမှ ထည့်သွင်းမှုများအပေါ် အခြေခံ၍ rpm နှင့် ဦးတည်ချက်အချက်ပြမှုများကို ပိတ်ဆို့သည်။ MC နှင့် SC controllers နှစ်ခုလုံးတွင်၊ ဤ function block သည် ၎င်း၏ လက်ခံရရှိသည်-
- MFIn ထည့်သွင်းမှုမှတဆင့် Spd ထည့်သွင်းခြင်း။
- ဒုတိယ MFIn ထည့်သွင်းမှု သို့မဟုတ် DigAn ထည့်သွင်းမှုမှတစ်ဆင့် DirIn ထည့်သွင်းခြင်း။
EMD Function Blocks အတွက် Controller Input Requirements
အောက်ပါဇယားများသည် EMD SPD DIR၊ EMD SPD DIR A နှင့် EMD SPD DIR D လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းအတွက် ထိန်းချုပ်ကိရိယာထည့်သွင်းမှုလိုအပ်ချက်များကို စာရင်းပြုစုထားသည်။
ထည့်သွင်းချိတ်ဆက်မှုများ—MC ထိန်းချုပ်ကိရိယာများ
| Function Block | Function Block ထည့်သွင်းခြင်း။ | Controller ထည့်သွင်းခြင်း။ | မှတ်ချက် |
| EMD SPD DIR | Spd | MFIN | အာရုံခံကိရိယာမှ သွေးခုန်နှုန်းအချက်ပြမှုမှတစ်ဆင့် အမြန်နှုန်းကို သတ်မှတ်သည်။ |
| DirIn | MFIN | Pull-up/pull-down resistors နှင့် vol ကိုအသုံးပြုသည်။tage ဦးတည်ချက်အချက်ပြမှု၏ပွင့်လင်း circuit ချို့ယွင်းမှုကိုရှာဖွေရန်။ | |
| EMD SPD DIR A | Spd | MFIN | အာရုံခံကိရိယာမှ သွေးခုန်နှုန်းအချက်ပြမှုမှတစ်ဆင့် အမြန်နှုန်းကို သတ်မှတ်သည်။ |
| DirIn | DigAn | ဦးတည်ချက်အချက်ပြ vol ကို သိရှိသည့်အခါမှသာ သိရှိနိုင်သည်။tage သည် မျှော်မှန်းထားသောဘောင်များအပြင်ဘက်တွင်ရှိသော်လည်း open circuit detection အတွက် ဆွဲယူအတက်/ဆွဲချသော resistors များ မရှိပါ။ | |
| အန်အင် | ဦးတည်ချက်အချက်ပြ vol ကို သိရှိသည့်အခါမှသာ သိရှိနိုင်သည်။tage သည် မျှော်မှန်းထားသောဘောင်များအပြင်ဘက်တွင်ရှိသော်လည်း open circuit detection အတွက် ဆွဲယူအတက်/ဆွဲချသော resistors များ မရှိပါ။ | ||
| EMD SPD DIR D | Spd | MFIN | အာရုံခံကိရိယာမှ သွေးခုန်နှုန်းအချက်ပြမှုမှတစ်ဆင့် အမြန်နှုန်းကို သတ်မှတ်သည်။ |
| DigDir | DigIn | ဦးတည်ချက်အချက်ပြမှုအတွက် အမှားအယွင်းမရှိ ထောက်လှမ်းပေးသည်။ | |
| DigAn | ဦးတည်ချက်အချက်ပြမှုအတွက် အမှားအယွင်းမရှိ ထောက်လှမ်းပေးသည်။ |
ထည့်သွင်းချိတ်ဆက်မှုများ—SC ထိန်းချုပ်ကိရိယာများ
| Function Block | Function Block ထည့်သွင်းခြင်း။ | Controller ထည့်သွင်းခြင်း။ | မှတ်ချက် |
| EMD SPD DIR | Spd | MFIN | အာရုံခံကိရိယာမှ သွေးခုန်နှုန်းအချက်ပြမှုမှတစ်ဆင့် အမြန်နှုန်းကို သတ်မှတ်သည်။ ထိန်းချုပ်ကိရိယာထည့်သွင်းမှုကို တံဆိပ်တပ်ရပါမည်။ Dig/Ana/Freq. |
| DirIn | MFIN | Pull-up/pull-down resistors နှင့် vol ကိုအသုံးပြုသည်။tage ဦးတည်ချက်အချက်ပြမှု၏ပွင့်လင်း circuit ချို့ယွင်းမှုကိုရှာဖွေရန်။ | |
| DigAn | Pull-up/pull-down resistors နှင့် vol ကိုအသုံးပြုသည်။tage ဦးတည်ချက်အချက်ပြမှု၏ပွင့်လင်း circuit ချို့ယွင်းမှုကိုရှာဖွေရန်။ |
Function Block Inputs
| ကုသိုလ်ကံ | ရိုက်ပါ။ | အပိုင်းအခြား | ဖော်ပြချက် |
| ပါရမီ | ဘတ်စ်ကား | —— | ဖန်ရှင်ဘလောက်များစွာကို အသုံးချနိုင်သော ဘုံဘောင်များအတွက် ထည့်သွင်းပါ။ ကြည့်ပါ။ Param Input အကြောင်း အသေးစိတ်အချက်အလက်များအတွက် စာမျက်နှာ 11 တွင် ဖော်ပြထားသည်။ |
| Spd | ဘတ်စ်ကား | —— | ဘတ်စ်ကားအတွက် ထည့်သွင်းခြင်း-
|
| နှုန်း | U32 | 1,250 မှ
10,000,000 |
ကာလအထွက်ကို တိုင်းတာသည်။ မြန်နှုန်းအာရုံခံကိရိယာ.
function block သည် the ကိုအသုံးပြုသည်။ နှုန်း အချက်ပြ၊ ရေတွက်ပါ။ အချက်ပြမှု၊ နှင့် Puls/Rev parameter value တွေကို တွက်ချက်ပါ။ RPM အထွက်။ 10,000 = 1,000 μs။ |
| ရေတွက်ပါ။ | U16 | ၅း၄၅ | ပရိုဂရမ် loop output အလိုက် တိုင်းတာသော အရေအတွက် မြန်နှုန်းအာရုံခံကိရိယာ.
function block သည် the ကိုအသုံးပြုသည်။ နှုန်း အချက်ပြ၊ ရေတွက်ပါ။ အချက်ပြမှု၊ နှင့် Puls/Rev parameter value တွေကို တွက်ချက်ပါ။ RPM အထွက်။ 1,000 = 1,000. |
| ပြင်ဆင်မှု | လိုင်းကားများ | —— | ဤထည့်သွင်းမှုကို စီစဉ်သတ်မှတ်ပေးသည့် အချက်ပြများ ပါရှိသည်။ |
| Dir In | ဘတ်စ်ကား | —— | ဘတ်စ်ကားအတွက် ထည့်သွင်းခြင်း-
|
| ဗို့/ဗို့tage | U16 | ၅း၄၅ | တိုင်းတာသည့် voltage ၏ဦးတည်ချက်အချက်ပြနိ မြန်နှုန်းအာရုံခံကိရိယာ လမ်းကြောင်းကို ဆုံးဖြတ်ရန် ဘလောက်က အသုံးပြုသည့် အထွက်များ။ |
| ပြင်ဆင်မှု | လိုင်းကားများ | —— | ဤထည့်သွင်းမှုကို စီစဉ်သတ်မှတ်ပေးသည့် အချက်ပြများ ပါရှိသည်။ |
ရုပ်ထွက်များ
Function Block Outputs
| ကုသိုလ်ကံ | ရိုက်ပါ။ | အပိုင်းအခြား | ဖော်ပြချက် |
| အဆင့်အတန်း | U16 | —— | လုပ်ဆောင်ချက် ပိတ်ဆို့ခြင်း အခြေအနေကို သတင်းပို့ပါ။
ဤလုပ်ဆောင်ချက်သည် ဘလောက်ကို အသုံးပြုသည်။ စံမဟုတ်သော ၎င်း၏ အဆင့်အတန်းနှင့် အမှားအယွင်းများကို အစီရင်ခံရန် အနည်းငယ် အစီအမံ။
|
| ပြတ်ရွေ့ | U16 | —— | လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်း၏ ချို့ယွင်းချက်များကို အစီရင်ခံသည်။
ဤလုပ်ဆောင်ချက်သည် ဘလောက်ကို အသုံးပြုသည်။ စံမဟုတ်သော ၎င်း၏ အဆင့်အတန်းနှင့် အမှားအယွင်းများကို အစီရင်ခံရန် အနည်းငယ် အစီအမံ။
|
| စစ်ဆေးသည် | ဘတ်စ်ကား | —— | ဘတ်စ်ကားဖြင့် ထုတ်ပေးသည်။ အကြိမ်ရေ, FltTmrDirနှင့် FltTmrFreq ပြဿနာဖြေရှင်းခြင်းအတွက် ရနိုင်သော အချက်ပြများ။ |
| အကြိမ်ရေ | U32 | 0 မှ 1,000၊
000,000 |
Speed Sensor ၏ ကြိမ်နှုန်းကို တိုင်းတာသည်။ 100,000 = 10,000 Hz |
| FaultTmrFreq | U16 | ၅း၄၅ | ကြိမ်နှုန်းချို့ယွင်းသောအခါ-
|
| FltTmrDir | U16 | ၅း၄၅ | ဦးတည်ချက်အမှားအယွင်းရှိသောအခါ
|
| RPM | U16 | ၅း၄၅ | တစ်မိနစ်လျှင် အမြန်နှုန်းအာရုံခံ လှည့်ပတ်မှု။
function block clampဒီ output က 2,500 ပါ။ 1 = 1 rpm ။ |
| dRPM | U16 | ၅း၄၅ | တစ်မိနစ်လျှင် အာရုံခံ လှည့်ပတ်မှု x 10 (deciRPM) အမြန်နှုန်း။ function block clampအထွက်နှုန်းက 25,000 ပါ။ |
| ဒါရိုက်တာ | S8 | -1, 0, +1 | Speed Sensor ၏ လှည့်ခြင်း ဦးတည်ချက်။
|
Function Block Connections အကြောင်း
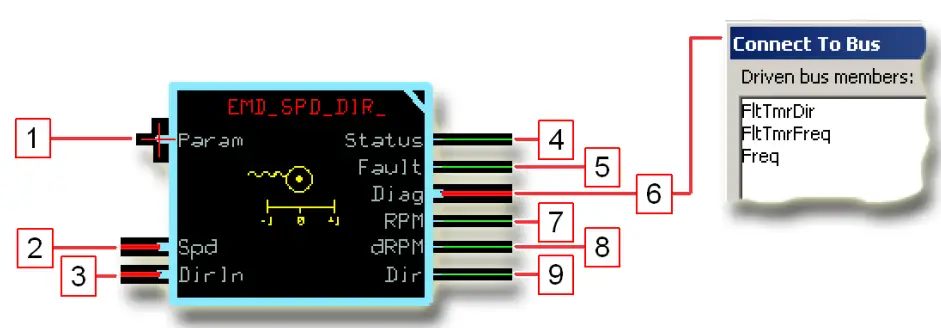
Function Block Connections အကြောင်း
| ကုသိုလ်ကံ | ဖော်ပြချက် |
| 1. | ဖန်ရှင်ဘလောက်များစွာကို အသုံးချနိုင်သော ဘုံဘောင်များအတွက် ထည့်သွင်းပါ။ |
| 2. | ဘတ်စ်ကားအတွက် ထည့်သွင်းခြင်း-
|
| 3. | ဘတ်စ်ကားအတွက် ထည့်သွင်းခြင်း-
|
| 4. | လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်း၏ အခြေအနေကို သတင်းပို့သည်။ |
| 5. | လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်း၏ ချို့ယွင်းချက်များကို အစီရင်ခံသည်။ |
| 6. | ဘတ်စ်ကားဖြင့် ထုတ်ပေးသည်။ အကြိမ်ရေ, FltTmrDirနှင့် FltTmrFreq ပြဿနာဖြေရှင်းခြင်းအတွက် ရနိုင်သော အချက်ပြများ။ |
| 7. | တစ်မိနစ်လျှင် အမြန်နှုန်းအာရုံခံ လှည့်ပတ်မှု။ |
| 8. | တစ်မိနစ်လျှင် အာရုံခံ လှည့်ပတ်မှု x 10 (deciRPM) အမြန်နှုန်း။ |
| 9. | Speed Sensor ၏ လှည့်ခြင်း ဦးတည်ချက်။
|
Status နှင့် Fault Logic
အခြား PLUS+1 လိုက်လျောညီထွေရှိသော လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းအများစုနှင့်မတူဘဲ၊ ဤလုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းသည် စံမဟုတ်သော အခြေအနေနှင့် အမှားကုဒ်များကို အသုံးပြုသည်။
Status Logic
| အဆင့်အတန်း | Hex* | ဒွိ | အကြောင်းရင်း | တုံ့ပြန်မှု | ဆုံးမခြင်း။ |
| ကန့်သတ်ချက်တစ်ခုသည် အပိုင်းအခြားပြင်ပတွင် ရှိနေသည်။ | က0x0008 | 1000 | Puls/Rev, FaultDetTm, သို့မဟုတ် DirLockHz ကန့်သတ်ချက်များသည် အပိုင်းအခြားပြင်ပတွင် ရှိနေသည်။ | function block clamps သည် ၎င်း၏အပေါ် သို့မဟုတ် အောက်ကန့်သတ်ချက်ရှိ ပြင်ပတန်ဖိုးဖြစ်သည်။ | ဘောင်ပြင်ပ ကန့်သတ်ဘောင်ကို ၎င်း၏ အပိုင်းအခြားအတွင်း ပြန်လည်ရယူပါ။ |
* Bit 16 သည် 1 သို့ သတ်မှတ်ထားသော စံ Danfoss အခြေအနေ သို့မဟုတ် အမှားကုဒ်ကို ခွဲခြားသတ်မှတ်သည်။
Fault Logic
| ပြတ်ရွေ့ | Hex* | ဒွိ | အကြောင်းရင်း | တုံ့ပြန်မှု | နှောင့်နှေးခြင်း။† | လက်ကိုင်တုတ်‡ | ဆုံးမခြင်း။ |
| နှုန်း function block တွင် signal များ Spd ထည့်သွင်းမှု နည်းလွန်းသည်။ | က0x0001 | 0001 | နှုန်း အချက်ပြ < 1,250 Hz | function block သည် ၎င်း၏အမြင့်ဆုံးကိုထုတ်ပေးသည်။ RPM နှင့် dRPM တန်ဖိုးများ | Y | N | မမှန်မကန်ဖြစ်စေနိုင်သော လျှပ်စစ်ဆူညံသံကဲ့သို့သော ဟာ့ဒ်ဝဲပြဿနာများကို စစ်ဆေးပါ။ နှုန်း signal တန်ဖိုး။ |
| ဗို့/ဗို့tage function block တွင် signal များ Spd ထည့်သွင်းမှုသည် အပိုင်းအခြားပြင်ပတွင် ရှိနေသည်။ | က0x0002 | 0010 | ဗို့/ဗို့tage signal သည် 1,000 နှင့် 2,500 mV ကြားဖြစ်သည်။
နှင့် ဘလောက်သည် Speed Sensor မှ ပဲမျိုးစုံကို လက်ခံရရှိခြင်း မရှိပါ။ |
function block သည်၎င်း၏သတ်မှတ်ပေးသည်။ RPM နှင့် dRPM 0 သို့ outputs ။ | Y | N | မမှန်မကန်ဖြစ်စေနိုင်သော လျှပ်စစ်ဆူညံသံကဲ့သို့သော ဟာ့ဒ်ဝဲပြဿနာများကို စစ်ဆေးပါ။ Volt/ Volttage signal တန်ဖိုး။ |
| ဗို့/ဗို့tage function block တွင် signal များ ဒါရိုက်တာ ထည့်သွင်းမှုသည် အပိုင်းအခြားပြင်ပတွင် ရှိနေသည်။ | က0x0004 | 0100 | ဗို့/ဗို့tage signal သည် 1,000 နှင့် 2,500 ကြားဖြစ်သည်။
mV |
function block သည်၎င်း၏သတ်မှတ်ပေးသည်။ ဒါရိုက်တာ output ကို 0 ။ | Y | N | မမှန်မကန်ဖြစ်စေနိုင်သော လျှပ်စစ်ဆူညံသံကဲ့သို့သော ဟာ့ဒ်ဝဲပြဿနာများကို စစ်ဆေးပါ။ Volt/ Volttage signal တန်ဖိုး။ |
* Bit 16 သည် 1 သို့ သတ်မှတ်ထားသော စံ Danfoss အခြေအနေ သို့မဟုတ် အမှားကုဒ်ကို ခွဲခြားသတ်မှတ်သည်။
† သတ်မှတ်ထားသော နှောင့်နှေးမှုအချိန်တစ်ခုအတွက် တွေ့ရှိထားသော ချို့ယွင်းချက်အခြေအနေ ဆက်လက်ရှိနေပါက နှောင့်နှေးသောအမှားကို အစီရင်ခံပါသည်။ နှောင့်နှေးနေသော ချို့ယွင်းချက်သည် နှောင့်နှေးသည့်အချိန်အတွက် အမှားအယွင်းအခြေအနေအား မတွေ့မချင်း မရှင်းလင်းနိုင်ပါ။
‡ function block သည် latched fault report ကို ဆက်လက်ထိန်းသိမ်းထားသည်။
Function Block Parameters
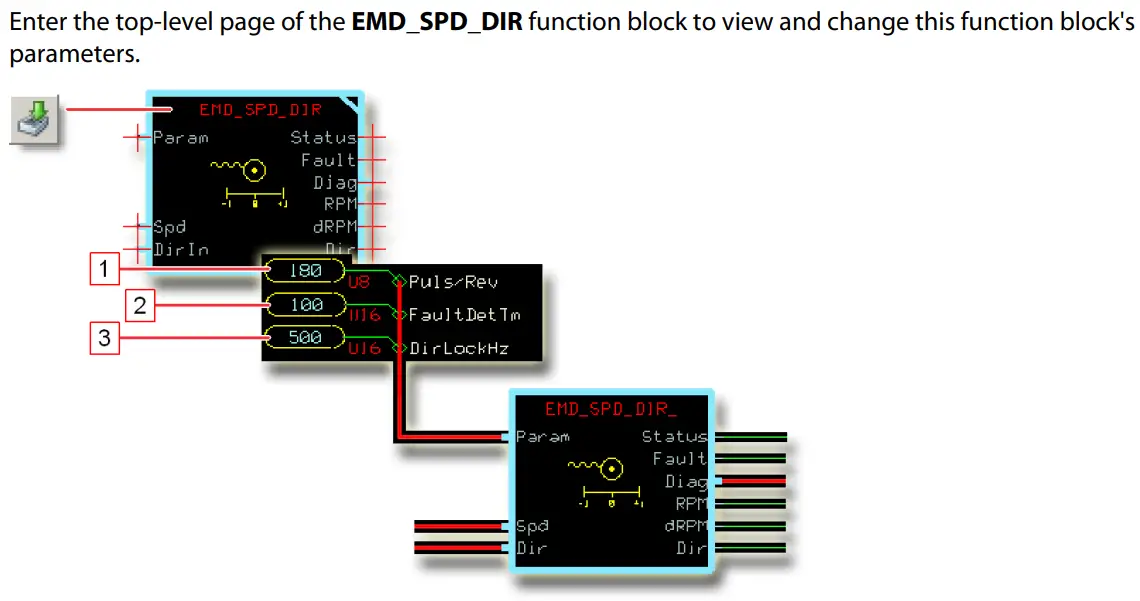
Function Block Parameters
| ကုသိုလ်ကံ | ရိုက်ပါ။ | အပိုင်းအခြား | ဖော်ပြချက် |
| 1. Puls/Rev | U8 | ၂–၃၂၊ ၃ | Speed Sensor ၏ တော်လှန်ရေးတစ်ခုလျှင် ပဲမျိုးစုံအရေအတွက်။ ကိုကိုးကားပါ။ EMD Speed Sensor နည်းပညာဆိုင်ရာ အချက်အလက် (Danfoss part L1017287) မှန်ကန်သောတန်ဖိုး။ |
| 2. FaultDetTm | U16 | ၁၀-၁၀၀ | function block သည် a ကိုတွေ့ရှိသောအခါကြားအချိန်ကိုသတ်မှတ်သည်-
|
| 3. DirLockHz | U16 | ၁၀-၁၀၀ | function block ၏ အထက်တွင်ရှိသော ကြိမ်နှုန်းကို သတ်မှတ်သည်။ ဒါရိုက်တာ output သော့ခတ်။ ဤကြိမ်နှုန်းအထက်တွင်၊ လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းသည် ဦးတည်ချက်ပြောင်းလဲမှုများကို အစီရင်ခံခြင်းမရှိပါ။
1,000 = 1,000 Hz |
Param Input အကြောင်း
ဤလုပ်ဆောင်ချက်ပိတ်ဆို့ရန်အတွက် ပြင်ပ ကန့်သတ်ဘောင်တန်ဖိုးများကို ထည့်သွင်းရန် Param ထည့်သွင်းမှုကို အသုံးပြုပါ။

ပုံအသေးစိတ်
| ကုသိုလ်ကံ | ဖော်ပြချက် |
| 1. | ၎င်းမှတဆင့် ဘုံဘောင်များကို လက်ခံရန် ဤစာမျက်နှာကို သင်မပြင်ဆင်မီ လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်း၏ ထိပ်တန်းစာမျက်နှာအတွင်းတွင် ပါရမီ ထည့်သွင်းမှု။ |
| 2. | ၎င်းမှတဆင့် ဘုံဘောင်များကို လက်ခံရန် ဤစာမျက်နှာကို သင်မွမ်းမံပြီးနောက် လုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်း၏ ထိပ်တန်းစာမျက်နှာအတွင်းတွင် ပါရမီ ထည့်သွင်းမှု။ |
Controller Configurations
MC နှင့် SC ထိန်းချုပ်ကိရိယာများတွင် ထည့်သွင်းမှုများသည် ဤလုပ်ဆောင်ချက်ပိတ်ဆို့ခြင်းနှင့်အတူ လုပ်ဆောင်ရန် ဖွဲ့စည်းမှုပုံစံ လိုအပ်သည်။ ကြည့်ပါ-
- စာမျက်နှာ 12 တွင် MC Controller Configurations
- စာမျက်နှာ 16 တွင် SC Controller Configurations
MC Controller ပြင်ဆင်မှုများ
Input ကို Configurations
| Function Block ထည့်သွင်းခြင်း။ | တွဲဖက်ထည့်သွင်းမှုအမျိုးအစား | ဖွဲ့စည်းမှုလုပ်ဆောင်ချက် |
| Spd | MFIN | ဖျက်ပါ
|
| DirIn | MFIN | ဖျက်ပါ
|
| DigAn | ဖျက်ပါ
|
Controller Configurations
Spd Input အတွက် MFIn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။
- input signal ကိုလက်ခံရရှိသော MFIn ကိုထည့်ပါ။
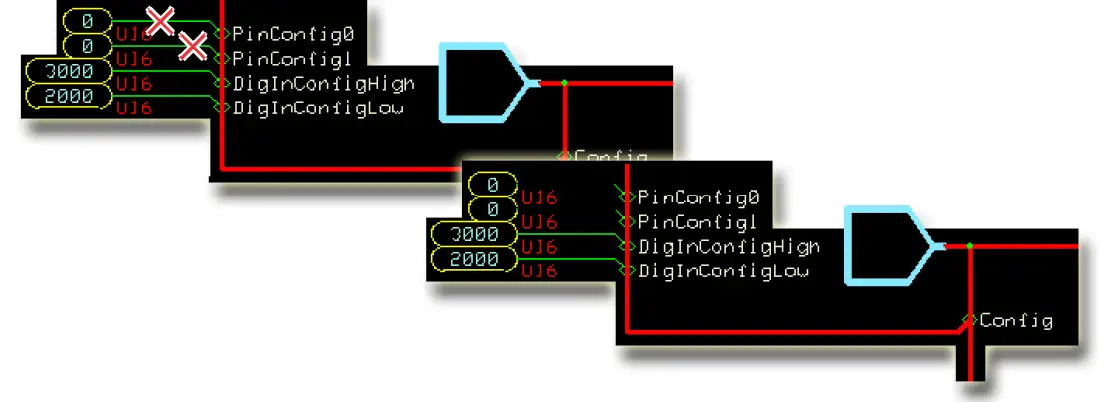
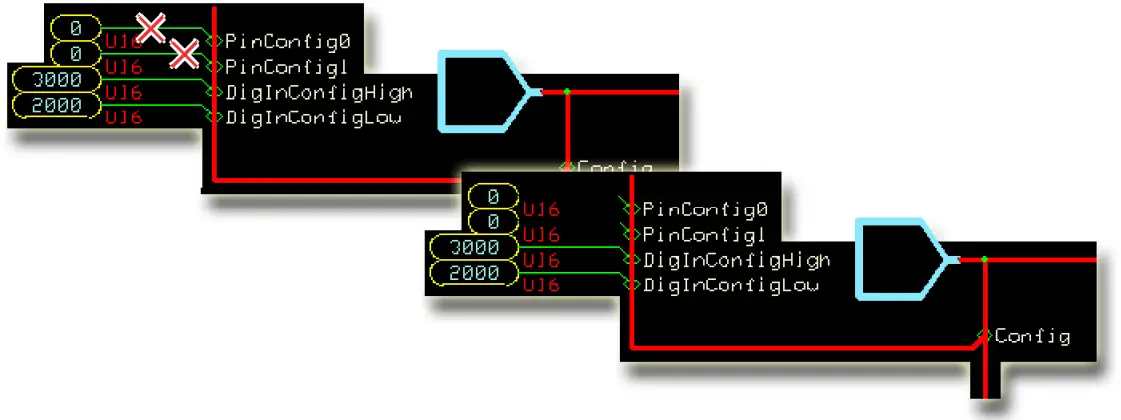
- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။
Controller Configurations
DirIn ထည့်သွင်းမှုအတွက် MFIn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။
- input signal ကိုလက်ခံရရှိသော MFIn ကိုထည့်ပါ။
- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။
DirIn Input အတွက် DigAn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။
- input signal ကိုလက်ခံရရှိသော DigAn စာမျက်နှာကိုရိုက်ထည့်ပါ။
- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။

SC Controller ဖွဲ့စည်းမှုပုံစံများ
Input ကို Configurations
| Function Block ထည့်သွင်းခြင်း။ | တွဲဖက်ထည့်သွင်းမှုအမျိုးအစား | ဖွဲ့စည်းမှုလုပ်ဆောင်ချက် |
| Spd | MFIN* | ဖျက်ပါ
|
| DirIn | MFIN | ဖျက်ပါ
|
| DigAn | ဖျက်ပါ
|
* သင်အသုံးပြုသော MFIn သည် Dig/Ana/Freq ဟုတံဆိပ်တပ်ရပါမည်။
† ရှိနေလျှင်။
Spd Input အတွက် MFIn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။
- input signal ကိုလက်ခံရရှိသော MFIn ကိုထည့်ပါ။
- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။

DirIn ထည့်သွင်းမှုအတွက် MFIn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။

- input signal ကိုလက်ခံရရှိသော MFIn ကိုထည့်ပါ။
- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။

DirIn Input အတွက် DigAn ကို ဘယ်လိုပြင်ဆင်မလဲ။
- GUIDE နမူနာပုံစံတွင်၊ ထည့်သွင်းမှုများ စာမျက်နှာကို ထည့်သွင်းပါ။
- input signal ကိုလက်ခံရရှိသည့် DigAn ကိုထည့်ပါ။

- အောက်ပါပုံတွင်ပြထားသည့် အပြောင်းအလဲများကို ပြုလုပ်ပါ။
ကျွန်ုပ်တို့ကမ်းလှမ်းသောထုတ်ကုန်များ
- Bent Axis မော်တာများ
- Closed Circuit Axial Piston Pumps နှင့် Motors များ
- ပြသပေးသည်။
- Electrohydraulic Power Steering
- လျှပ်စစ်ဟိုက်ဒရောလစ်
- ဟိုက်ဒရောလစ်ပါဝါစတီယာရင်
- ပေါင်းစပ်စနစ်များ
- ဂျွိုင်းစတစ်များနှင့် ထိန်းချုပ်လက်ကိုင်များ
- မိုက်ခရိုကွန်ထရိုလာများနှင့် ဆော့ဖ်ဝဲလ်များ
- Circuit Axial Piston Pumps ကိုဖွင့်ပါ။
- Orbital မော်တာများ
- PLUS+1® လမ်းညွှန်
- အချိုးကျအဆို့ရှင်များ
- အာရုံခံကိရိယာများ
- စတီယာရင်
- Transit Mixer Drives
Danfoss Power Solutions သည် အရည်အသွေးမြင့် ဟိုက်ဒရောလစ်နှင့် အီလက်ထရွန်းနစ် အစိတ်အပိုင်းများကို ကမ္ဘာလုံးဆိုင်ရာ ထုတ်လုပ်သူနှင့် ပေးသွင်းသူဖြစ်သည်။ ကျွန်ုပ်တို့သည် မိုဘိုင်းအဝေးပြေးလမ်းမကြီးစျေးကွက်၏ ကြမ်းတမ်းသောလည်ပတ်မှုအခြေအနေများတွင် ထူးချွန်သည့် ခေတ်မီနည်းပညာနှင့် ဖြေရှင်းချက်များကို ပံ့ပိုးပေးရာတွင် အထူးပြုပါသည်။ ကျွန်ုပ်တို့၏ကျယ်ပြန့်သောအသုံးချပလီကေးရှင်းကျွမ်းကျင်မှုအပေါ်အခြေခံ၍ ကျယ်ပြန့်သောအဝေးပြေးယာဉ်များအတွက် ထူးခြားသောစွမ်းဆောင်ရည်သေချာစေရန် ကျွန်ုပ်တို့၏ဖောက်သည်များနှင့် အနီးကပ်လုပ်ဆောင်ပါသည်။
ကျွန်ုပ်တို့သည် ကမ္ဘာတစ်ဝှမ်းရှိ OEM များကို စနစ်ဖွံ့ဖြိုးတိုးတက်မှုကို အရှိန်မြှင့်ရန်၊ ကုန်ကျစရိတ်များကို လျှော့ချကာ မော်တော်ယာဉ်များကို စျေးကွက်သို့ ပိုမိုမြန်ဆန်စွာ ယူဆောင်လာစေရန် ကူညီပေးပါသည်။
Danfoss - Mobile Hydraulics တွင် သင်၏ အခိုင်မာဆုံး လက်တွဲဖော်။
သွားပါ။ www.powersolutions.danfoss.com နောက်ထပ်ထုတ်ကုန်အချက်အလက်အတွက်။
အဝေးပြေးယာဉ်များ အလုပ်လုပ်သည့်နေရာတိုင်း၊ Danfoss သည်လည်း အလားတူပင်ဖြစ်သည်။ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ဖောက်သည်များအတွက် ကမ္ဘာတစ်ဝှမ်းမှ ကျွမ်းကျင်သူများ၏ ပံ့ပိုးကူညီမှုကို ပေးစွမ်းပြီး ထူးချွန်သောစွမ်းဆောင်ရည်အတွက် အကောင်းဆုံးဖြစ်နိုင်သော ဖြေရှင်းနည်းများကို အာမခံပါသည်။ Global Service Partners များ၏ ကျယ်ပြန့်သော ကွန်ရက်နှင့်အတူ၊ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ အစိတ်အပိုင်းအားလုံးအတွက် ကျယ်ကျယ်ပြန့်ပြန့် ကမ္ဘာလုံးဆိုင်ရာ ဝန်ဆောင်မှုကိုလည်း ပေးပါသည်။
သင့်အနီးဆုံး Danfoss Power Solution ကိုယ်စားလှယ်ထံ ဆက်သွယ်ပါ။
Comatrol
www.comatrol.com
Schwarzmüller-အင်ဗာတာ www.schwarzmueller-inverter.com
Turolla
www.turollaocg.com
Valmova
www.valmova.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss www.daikin-sauer-danfoss.com
ဒန်ဖော့
Power Solutions (US) ကုမ္ပဏီ ၂၈၀၀ အရှေ့ ၁၃ လမ်း
Ames၊ IA 50010၊ USA
ဖုန်း- +၃၄ ၉၃၈ ၇၀၀ ၈၉၅
ဒန်ဖော့
Power Solutions GmbH & Co. OHG Krokamp 35
D-24539 Neumünster၊ ဂျာမနီ ဖုန်း- +49 4321 871 0
ဒန်ဖော့
Power Solutions ApS Nordborgvej 81
DK-6430 Nordborg၊ ဒိန်းမတ် ဖုန်း- +45 7488 2222
ဒန်ဖော့
Power Solutions (Shanghai) Co., Ltd.
အဆောက်အဦ #22၊ အမှတ် 1000 Jin Hai Rd Jin Qiao၊ Pudong New District Shanghai, China 201206 ဖုန်း- +86 21 3418 5200
Danfoss သည် ကက်တလိုးများ၊ ဘရိုရှာများနှင့် အခြားပုံနှိပ်ထားသော ပစ္စည်းများတွင် ဖြစ်နိုင်ချေရှိသော အမှားများအတွက် တာဝန်မရှိပါ။ Danfoss သည် ၎င်း၏ထုတ်ကုန်များကို အသိပေးခြင်းမရှိဘဲ ပြောင်းလဲပိုင်ခွင့်ရှိသည်။ သဘောတူထားပြီးသား သတ်မှတ်ချက်များတွင် မလိုအပ်ဘဲ ပြောင်းလဲမှုများ ပြုလုပ်နိုင်စေသည့် မှာကြားထားသည့် ထုတ်ကုန်များနှင့်လည်း သက်ဆိုင်ပါသည်။
ဤပစ္စည်းရှိ ကုန်အမှတ်တံဆိပ်များအားလုံးသည် သက်ဆိုင်ရာကုမ္ပဏီများ၏ ပိုင်ဆိုင်မှုဖြစ်သည်။ Danfoss နှင့် Danfoss လိုဂိုအမျိုးအစားများသည် Danfoss A/S ၏ ကုန်အမှတ်တံဆိပ်များဖြစ်သည်။ မူပိုင်ခွင့်များရယူပြီး။
L1429328 • Rev AA • ဒီဇင်ဘာ 2014
www.danfoss.com ဖြစ်သည်
© Danfoss A/S၊ 2014
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
Danfoss Compliant EMD Speed Direction Function Block [pdf] အသုံးပြုသူလက်စွဲ လိုက်လျောညီထွေဖြစ်သော EMD မြန်နှုန်းလမ်းညွှန်လုပ်ဆောင်ချက်ပိတ်ဆို့၊ မြန်နှုန်းလမ်းညွှန်လုပ်ဆောင်ချက်ပိတ်ဆို့၊ လမ်းညွှန်လုပ်ဆောင်ချက်ပိတ်ဆို့၊ လုပ်ဆောင်ချက်ပိတ်ဆို့ |



