Danfoss-ի համապատասխան EMD Speed Direction Function Block
Տեխնիկական պայմաններ
- Ապրանքի անվանումը՝ PLUS+1 Համապատասխան EMD արագության ցուցիչի ուղղության ֆունկցիայի բլոկ
- Արդյունք՝ RPM և ուղղորդող ազդանշաններ
- Ներածման տիրույթը.
- Արագություն (Spd)՝ 1,250-ից 10,000,000
- Ուղղություն (Dir In): 0-ից 5,250 վոլտ
Ապրանքի օգտագործման հրահանգներ
Վերահսկիչի կոնֆիգուրացիաներ
EMD_SPD_DIR ֆունկցիոնալ բլոկը թողարկում է պտույտ/րոպե և ուղղորդող ազդանշաններ՝ հիմնված EMD արագության ցուցիչի մուտքերի վրա: Այն կարող է օգտագործվել ինչպես MC, այնպես էլ SC կարգավորիչների վրա:
Վերահսկիչի մուտքագրման պահանջները
Կարգավորիչի մուտքագրման պահանջները EMD SPD DIR ֆունկցիայի բլոկի համար հետևյալն են.
- MC Կարգավորիչներ.
- Spd – MFIn – DirIn
- SC Կարգավորիչներ.
- Spd – MFIn – DirIn – DigAn
Գործառույթների արգելափակման մուտքեր
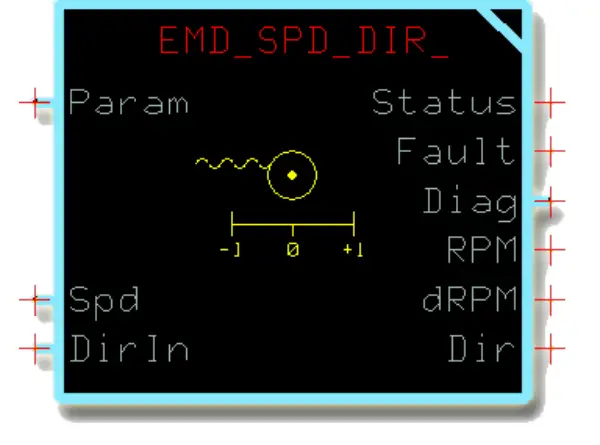
EMD_SPD_DIR Function Block մուտքերը հետևյալն են.
- Spd (Արագություն): Ավտոբուս մեկ U32 Count U16 – Շրջանակ:
1,250-ից մինչև 10,000,000 - Ռեժիսոր In (ուղղությամբ): Bus Volt/Voltage U16 –
Շարժման միջակայք՝ 0-ից 5,250 վոլտ
Գործառույթների արգելափակման ելքեր
EMD_SPD_DIR Function Block-ի ելքերը հետևյալն են.
- Կարգավիճակը: U16 – միջակայք՝ 0-ից 65,535
- Մեղքը: U16 – միջակայք՝ 0-ից 1,000,000,000
- RPM: U16 – միջակայք՝ 0-ից 25,000
- dRPM: U16 – միջակայք՝ 0-ից 2,500
- Ռեժիսոր: S8 – Արժեքներ՝ -1, 0, +1
ՀՏՀ
- Ո՞րն է EMD_SPD_DIR ֆունկցիոնալ բլոկի նպատակը:
EMD_SPD_DIR ֆունկցիոնալ բլոկը թողարկում է պտույտ/րոպե և ուղղորդող ազդանշաններ՝ հիմնված EMD արագության ցուցիչի մուտքերի վրա: - Որո՞նք են MC Controllers-ի EMD_SPD_DIR ֆունկցիայի բլոկի մուտքագրման պահանջները:
MC Controllers-ի մուտքագրման պահանջներն են Spd, MFIn և DirIn: - Ինչ է հատtagEMD_SPD_DIR ֆունկցիոնալ բլոկի ուղղության մուտքագրման (Dir In) միջակայքը:
ՀատորըtagՈւղղության մուտքագրման միջակայքը 0-ից 5,250 վոլտ է:
Վերանայման պատմություն
Վերանայումների աղյուսակ
| Ամսաթիվ | Փոխվել է | Վեր |
| 2014 թվականի դեկտեմբեր | AA |
EMD_SPD_DIR ֆունկցիոնալ բլոկ
Ավարտվել էview
Այս ֆունկցիայի բլոկը թողարկում է պտույտ/րոպե և ուղղորդող ազդանշաններ՝ հիմնված EMD Speed Sensor-ի մուտքերի վրա: Ինչպես MC, այնպես էլ SC կարգավորիչներում այս գործառույթի բլոկը ստանում է իր.
- Spd մուտքագրում MFIn մուտքի միջոցով:
- DirIn մուտքագրում կա՛մ երկրորդ MFIn մուտքագրման, կա՛մ DigAn մուտքի միջոցով:
Կարգավորիչի մուտքագրման պահանջները EMD ֆունկցիոնալ բլոկների համար
Հետևյալ աղյուսակներում թվարկված են կարգավորիչի մուտքագրման պահանջները EMD SPD DIR, EMD SPD DIR A և EMD SPD DIR D ֆունկցիաների բլոկների համար:
Ներածման միացումներ-MC Կարգավորիչներ
| Ֆունկցիոնալ բլոկ | Function Block Input | Վերահսկիչի մուտքագրում | Մեկնաբանություն |
| EMD SPD DIR | Spd | MFIn | Որոշում է արագությունը սենսորից զարկերակային ազդանշանի միջոցով: |
| DirIn | MFIn | Օգտագործում է pull-up/pull-down resistors և voltagե հայտնաբերելու ուղղության ազդանշանի բաց միացման ձախողումը: | |
| EMD SPD DIR Ա | Spd | MFIn | Որոշում է արագությունը սենսորից զարկերակային ազդանշանի միջոցով: |
| DirIn | ԴիգԱն | Հայտնում է միայն, երբ ուղղության ազդանշանի ծավալըtage-ը ակնկալվող միջակայքներից դուրս է, սակայն բաց շղթայի հայտնաբերման համար բացվող/թափվող ռեզիստորներ չունի: | |
| ԱնԻն | Հայտնում է միայն, երբ ուղղության ազդանշանի ծավալըtage-ը ակնկալվող միջակայքներից դուրս է, սակայն բաց շղթայի հայտնաբերման համար բացվող/թափվող ռեզիստորներ չունի: | ||
| EMD SPD DIR D | Spd | MFIn | Որոշում է արագությունը սենսորից զարկերակային ազդանշանի միջոցով: |
| DigDir | DigIn | Ապահովում է ոչ մի անսարքության հայտնաբերում ուղղության ազդանշանի համար: | |
| ԴիգԱն | Ապահովում է ոչ մի անսարքության հայտնաբերում ուղղության ազդանշանի համար: |
Ներածման միացումներ - SC Կարգավորիչներ
| Ֆունկցիոնալ բլոկ | Function Block Input | Վերահսկիչի մուտքագրում | Մեկնաբանություն |
| EMD SPD DIR | Spd | MFIn | Որոշում է արագությունը սենսորից զարկերակային ազդանշանի միջոցով: Կարգավորիչի մուտքագրումը պետք է պիտակավորված լինի Dig/Ana/Freq. |
| DirIn | MFIn | Օգտագործում է pull-up/pull-down resistors և voltagե հայտնաբերելու ուղղության ազդանշանի բաց միացման ձախողումը: | |
| ԴիգԱն | Օգտագործում է pull-up/pull-down resistors և voltagե հայտնաբերելու ուղղության ազդանշանի բաց միացման ձախողումը: |
Գործառույթների արգելափակման մուտքեր
| Նյութ | Տեսակ | Շրջանակ | Նկարագրություն |
| Պարամ | Ավտոբուս | —— | Մուտքագրում ընդհանուր պարամետրերի համար, որոնք կարող են կիրառվել բազմաթիվ գործառույթների բլոկների վրա: Տես Param Input-ի մասին էջ 11՝ լրացուցիչ տեղեկությունների համար: |
| Spd | Ավտոբուս | —— | Մուտքագրում ավտոբուսի համար՝
|
| Պեր | U32 | 1,250 դեպի
10,000,000 |
Չափված ժամանակաշրջանի արդյունքը Արագության սենսոր.
Ֆունկցիոնալ բլոկը օգտագործում է Պեր ազդանշան, հաշվել ազդանշան, և Puls/Rev պարամետրի արժեքը հաշվարկելու համար RPM ելքը։ 10,000 = 1,000 մկվ: |
| հաշվել | U16 | 0-ից մինչև 65,535 | Չափված հաշվարկը մեկ ծրագրի հանգույցի ելքի կողմից Արագության սենսոր.
Ֆունկցիոնալ բլոկը օգտագործում է Պեր ազդանշան, հաշվել ազդանշան, և Puls/Rev պարամետրի արժեքը հաշվարկելու համար RPM ելքը։ 1,000 = 1,000: |
| Կազմաձև | Ենթավտոբուս | —— | Պարունակում է ազդանշաններ, որոնք կարգավորում են այս մուտքը: |
| Ռեժ | Ավտոբուս | —— | Մուտքագրում ավտոբուսի համար՝
|
| Volt/Voltage | U16 | 0-ից մինչև 5,250 | Չափված ծավալըtage-ի ուղղության ազդանշանը, որ Արագության սենսոր ելքեր, որոնք բլոկն օգտագործում է ուղղությունը որոշելու համար: |
| Կազմաձև | Ենթավտոբուս | —— | Պարունակում է ազդանշաններ, որոնք կարգավորում են այս մուտքը: |
Արդյունքներ
Գործառույթների արգելափակման ելքեր
| Նյութ | Տեսակ | Շրջանակ | Նկարագրություն |
| Կարգավիճակ | U16 | —— | Հաղորդում է գործառույթի բլոկի կարգավիճակի մասին:
Այս ֆունկցիայի բլոկը օգտագործում է a ոչ ստանդարտ bitwise սխեման՝ իր կարգավիճակի և անսարքությունների մասին հաղորդելու համար:
|
| Մեղք | U16 | —— | Հաղորդում է ֆունկցիոնալ բլոկի անսարքությունների մասին:
Այս ֆունկցիայի բլոկը օգտագործում է a ոչ ստանդարտ bitwise սխեման՝ իր կարգավիճակի և անսարքությունների մասին հաղորդելու համար:
|
| դիագ | Ավտոբուս | —— | Արդյունքները մի ավտոբուս հետ հաճախ, FltTmrDir, և FltTmrFreq ազդանշաններ, որոնք հասանելի են անսարքությունների վերացման համար: |
| հաճախ | U32 | 0-ից 1,000,
000,000 |
Արագության ցուցիչի չափված հաճախականությունը: 100,000 = 10,000 Հց: |
| FaultTmrFreq | U16 | 0-ից մինչև 65,535 | Հաճախականության անսարքության դեպքում.
|
| FltTmrDir | U16 | 0-ից մինչև 65,535 | Երբ ուղղության սխալ կա.
|
| RPM | U16 | 0-ից մինչև 2,500 | Արագության սենսորի պտույտները րոպեում:
Ֆունկցիոնալ բլոկը clampսա ելքը 2,500 է: 1 = 1 պտ/րոպ. |
| dRPM | U16 | 0-ից մինչև 25,000 | Արագության սենսորի պտույտները րոպեում x 10 (deciRPM): Ֆունկցիոնալ բլոկը clampայս արդյունքը 25,000 է: |
| Ռեժ | S8 | -1, 0, +1 | Արագության սենսորի պտտման ուղղությունը:
|
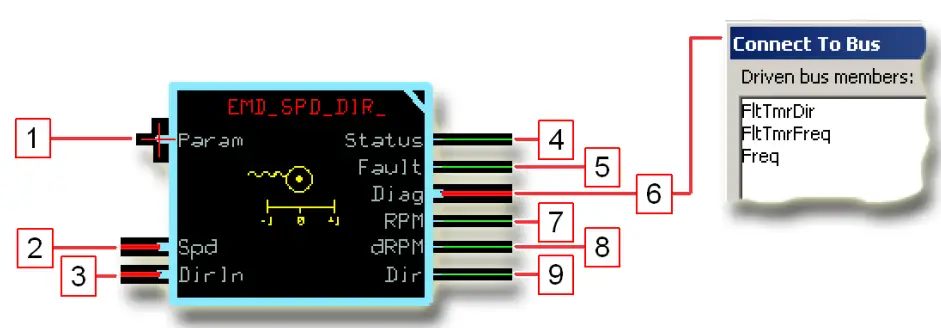
Function Block Connections-ի մասին
Function Block Connections-ի մասին
| Նյութ | Նկարագրություն |
| 1. | Մուտքագրում ընդհանուր պարամետրերի համար, որոնք կարող են կիրառվել բազմաթիվ գործառույթների բլոկների վրա: |
| 2. | Մուտքագրում ավտոբուսի համար՝
|
| 3. | Մուտքագրում ավտոբուսի համար՝
|
| 4. | Հաղորդում է գործառույթի բլոկի կարգավիճակի մասին: |
| 5. | Հաղորդում է ֆունկցիայի բլոկի անսարքությունների մասին: |
| 6. | Արդյունքները մի ավտոբուս հետ հաճախ, FltTmrDir, և FltTmrFreq ազդանշաններ, որոնք հասանելի են անսարքությունների վերացման համար: |
| 7. | Արագության սենսորի պտույտները րոպեում: |
| 8. | Արագության սենսորի պտույտները րոպեում x 10 (deciRPM): |
| 9. | Արագության սենսորի պտտման ուղղությունը:
|
Կարգավիճակ և սխալ տրամաբանություն
Ի տարբերություն PLUS+1-ին համապատասխանող այլ ֆունկցիոնալ բլոկների, այս ֆունկցիայի բլոկը օգտագործում է ոչ ստանդարտ կարգավիճակի և անսարքության կոդեր:
Կարգավիճակի տրամաբանություն
| Կարգավիճակ | Hex* | Երկուական | Պատճառը | Արձագանք | Ուղղում |
| Պարամետրը տիրույթից դուրս է: | 0x0008 | 1000 | Puls/Rev, FaultDetTm, կամ DirLockHz պարամետրը տիրույթից դուրս է: | Ֆունկցիոնալ բլոկը clamps տիրույթից դուրս արժեք իր վերին կամ ստորին սահմաններում: | Վերադարձեք տիրույթից դուրս պարամետրը իր տիրույթում: |
* 16-րդ բիթը, որը դրված է 1-ին, նույնացնում է ստանդարտ Danfoss կարգավիճակը կամ սխալի կոդը:
Սխալ տրամաբանություն
| Մեղք | Hex* | Երկուական | Պատճառը | Արձագանք | Հետաձգում† | Սողնակ‡ | Ուղղում |
| Պեր ազդանշան գործառույթի բլոկում Spd մուտքագրումը չափազանց ցածր է: | 0x0001 | 0001 | Պեր ազդանշան < 1,250 Հց: | Ֆունկցիոնալ բլոկը թողարկում է իր առավելագույնը RPM և dRPM արժեքներ։ | Y | N | Ստուգեք ապարատային խնդիրներ, ինչպիսիք են էլեկտրական աղմուկը, որը կարող է անվավեր առաջացնել Պեր ազդանշանի արժեքը. |
| Volt/Voltage ազդանշան գործառույթի բլոկում Spd մուտքագրումը տիրույթից դուրս է: | 0x0002 | 0010 | Volt/Voltage ազդանշանը 1,000-ից 2,500 մՎ-ի միջև է
և բլոկը արագության սենսորից իմպուլսներ չի ստանում: |
Ֆունկցիոնալ բլոկը սահմանում է իր RPM և dRPM ելքերը մինչև 0: | Y | N | Ստուգեք ապարատային խնդիրներ, ինչպիսիք են էլեկտրական աղմուկը, որը կարող է անվավեր առաջացնել Volt/ Volttage ազդանշանի արժեքը. |
| Volt/Voltage ազդանշան գործառույթի բլոկում Ռեժ մուտքագրումը տիրույթից դուրս է: | 0x0004 | 0100 | Volt/Voltage ազդանշանը 1,000-ից 2,500 է
mV. |
Ֆունկցիոնալ բլոկը սահմանում է իր Ռեժ ելքը մինչև 0: | Y | N | Ստուգեք ապարատային խնդիրներ, ինչպիսիք են էլեկտրական աղմուկը, որը կարող է անվավեր առաջացնել Volt/ Volttage ազդանշանի արժեքը. |
* 16-րդ բիթը, որը դրված է 1-ին, նույնացնում է ստանդարտ Danfoss կարգավիճակը կամ սխալի կոդը:
† Հաղորդվում է ուշացած անսարքության մասին, եթե հայտնաբերված անսարքության պայմանը պահպանվում է որոշակի ուշացման ժամանակ: Հետաձգված անսարքությունը չի կարող վերացվել, քանի դեռ անսարքության պայմանը չբացահայտված մնա հետաձգման ժամանակի համար:
‡ Ֆունկցիոնալ բլոկը պահպանում է փակված անսարքության մասին հաշվետվություն, մինչև սողնակն ազատվի:
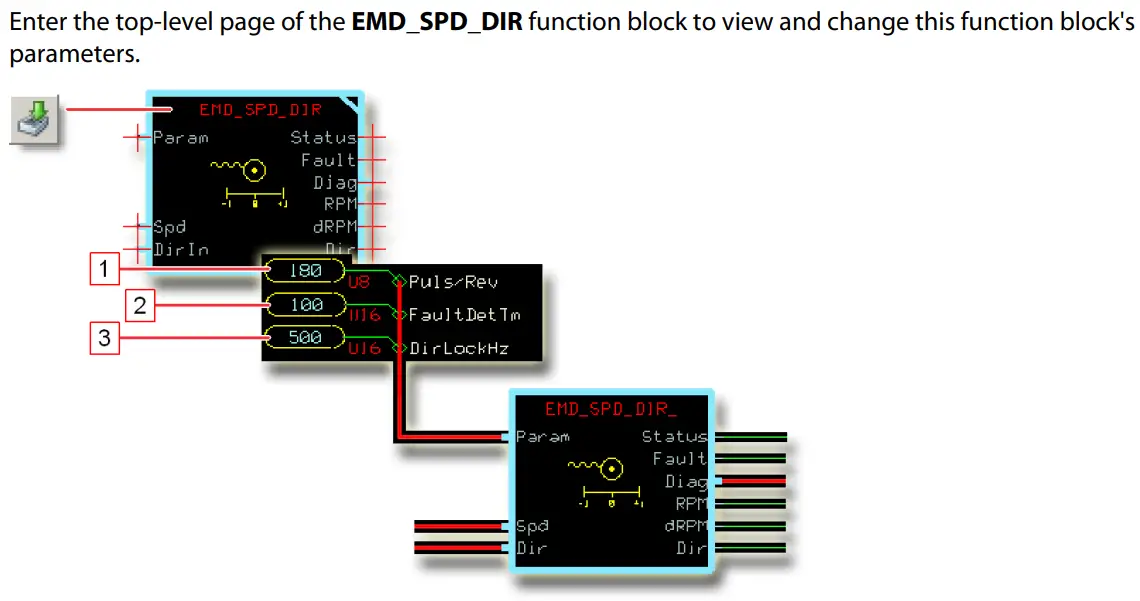
Ֆունկցիայի բլոկի պարամետրերը
Ֆունկցիայի բլոկի պարամետրերը
| Նյութ | Տեսակ | Շրջանակ | Նկարագրություն |
| 1. Puls/Rev | U8 | 20–120, 180 | Արագության ցուցիչի մեկ պտույտի վրա իմպուլսների քանակը: Անդրադարձեք EMD Speed Sensor Տեխնիկական տեղեկատվություն (Danfoss մաս L1017287) ճիշտ արժեքի համար: |
| 2. FaultDetTm | U16 | 0–65,535 | Սահմանում է այն ժամանակահատվածը, երբ գործառույթի բլոկը հայտնաբերում է հետևյալը.
|
| 3. DirLockHz | U16 | 0–8,000 | Սահմանում է այն հաճախականությունը, որից բարձր է ֆունկցիայի բլոկը Ռեժ ելքային կողպեքներ. Այս հաճախականությունից բարձր ֆունկցիայի բլոկը չի հաղորդում ուղղության փոփոխությունների մասին:
1,000 = 1,000 Հց: |
Param Input-ի մասին
Օգտագործեք Param մուտքագրումը այս ֆունկցիայի բլոկին արտաքին պարամետրերի արժեքները մուտքագրելու համար:

Նկար Մանրամասներ
| Նյութ | Նկարագրություն |
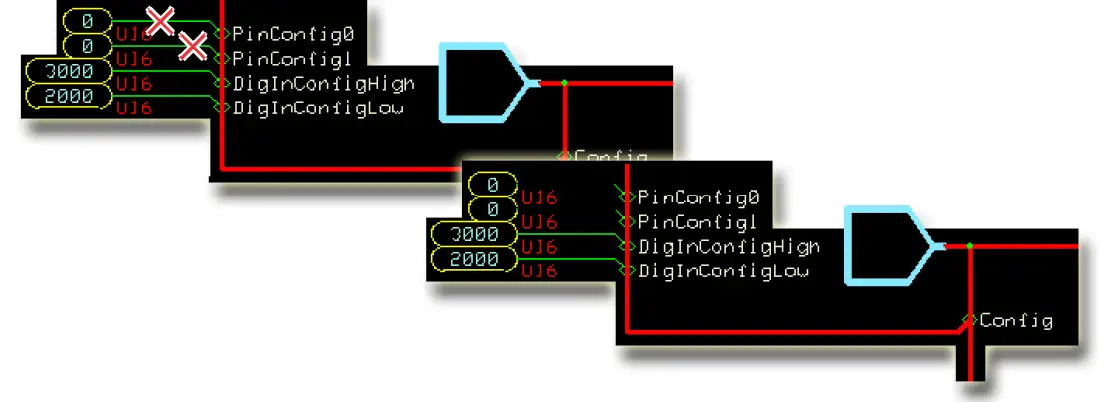
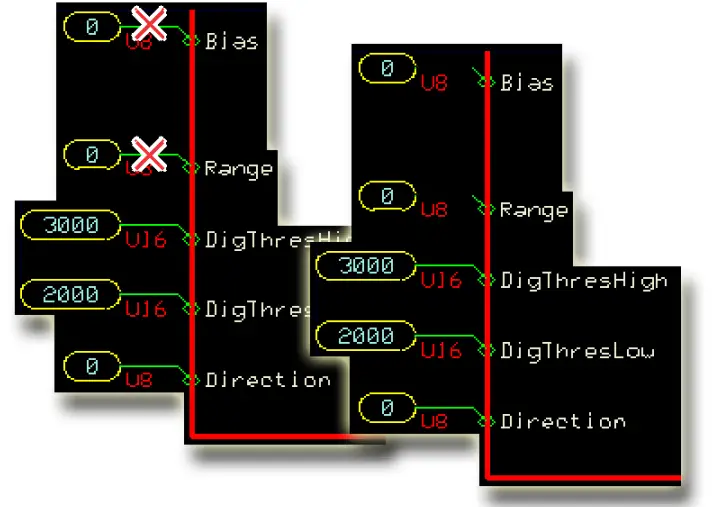
| 1. | Ֆունկցիոնալ բլոկի վերին մակարդակի էջի ներսում՝ նախքան այս էջը փոփոխելը՝ դրա միջոցով ընդհանուր պարամետրեր ընդունելու համար Պարամ մուտքագրում. |
| 2. | Ֆունկցիոնալ բլոկի վերին մակարդակի էջի ներսում՝ այս էջը փոփոխելուց հետո՝ դրա միջոցով ընդհանուր պարամետրեր ընդունելու համար Պարամ մուտքագրում. |
Վերահսկիչի կոնֆիգուրացիաներ
MC և SC կարգավարների մուտքերը պահանջում են կոնֆիգուրացիա այս ֆունկցիայի բլոկի հետ աշխատելու համար: Տես.
- MC Controller-ի կոնֆիգուրացիաներ 12-րդ էջում:
- SC Controller Configurations էջ 16:
MC Controller-ի կոնֆիգուրացիաներ
Ներածման կազմաձևեր
| Function Block Input | Համատեղելի մուտքագրման տեսակ | Կազմաձևման գործողություն |
| Spd | MFIn | Ջնջել՝
|
| DirIn | MFIn | Ջնջել՝
|
| ԴիգԱն | Ջնջել՝
|
Վերահսկիչի կոնֆիգուրացիաներ
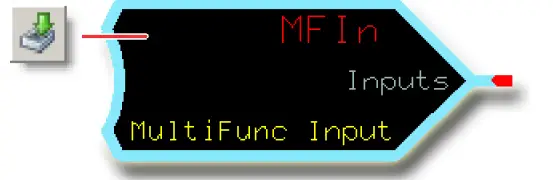
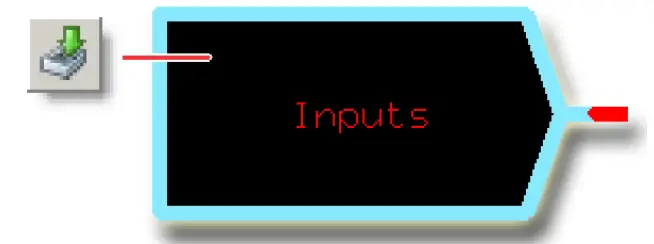
Ինչպես կարգավորել MFIn-ը Spd մուտքագրման համար
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:
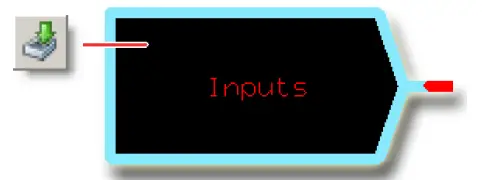
- Մուտքագրեք MFI-ն, որն ընդունում է մուտքային ազդանշանը:
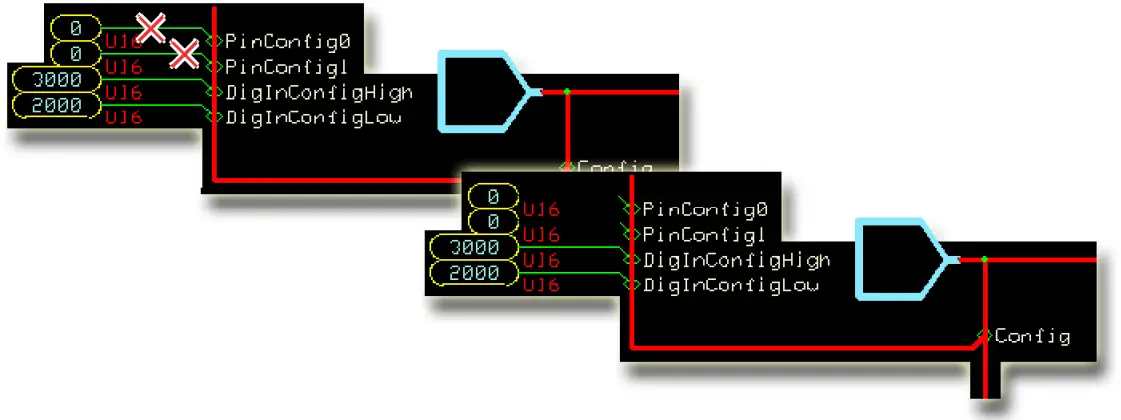
- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։
Վերահսկիչի կոնֆիգուրացիաներ
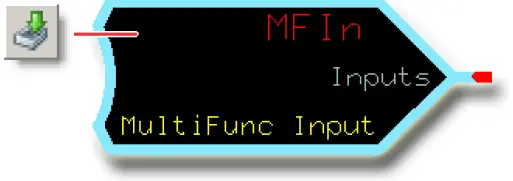
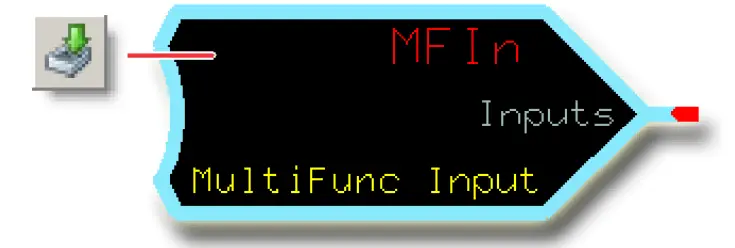
Ինչպես կարգավորել MFIn-ը DirIn մուտքագրման համար
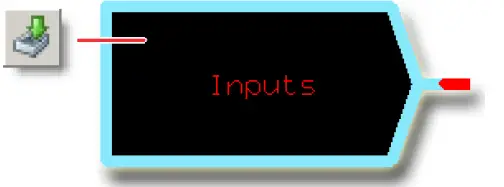
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:
- Մուտքագրեք MFI-ն, որն ընդունում է մուտքային ազդանշանը:
- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։
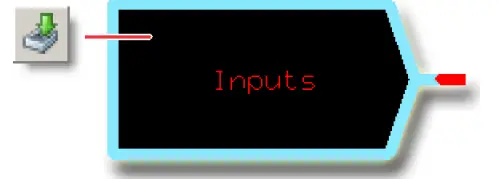
Ինչպես կարգավորել DigAn-ը DirIn մուտքագրման համար
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:
- Մուտքագրեք DigAn էջը, որն ընդունում է մուտքային ազդանշանը:
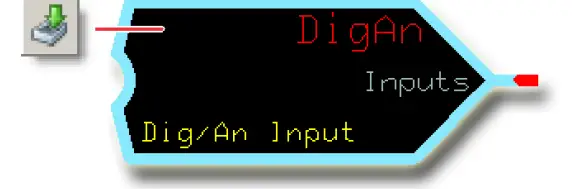
- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։

SC Controller Configurations
Ներածման կազմաձևեր
| Function Block Input | Համատեղելի մուտքագրման տեսակ | Կազմաձևման գործողություն |
| Spd | MFIn* | Ջնջել՝
|
| DirIn | MFIn | Ջնջել՝
|
| ԴիգԱն | Ջնջել՝
|
* Ձեր օգտագործած MFI-ը պետք է պիտակավորվի Dig/Ana/Freq:
† Եթե առկա է:
Ինչպես կարգավորել MFIn-ը Spd մուտքագրման համար
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:
- Մուտքագրեք MFI-ն, որն ընդունում է մուտքային ազդանշանը:
- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։

Ինչպես կարգավորել MFIn-ը DirIn մուտքագրման համար
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:

- Մուտքագրեք MFI-ն, որն ընդունում է մուտքային ազդանշանը:
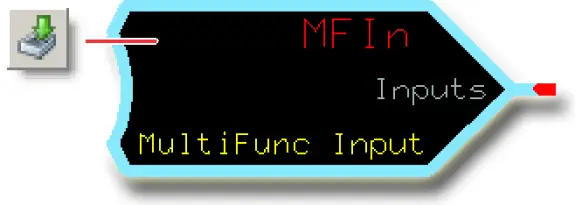
- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։

Ինչպես կարգավորել DigAn-ը DirIn մուտքագրման համար
- GUIDE ձևանմուշում մուտքագրեք «Inputs» էջը:
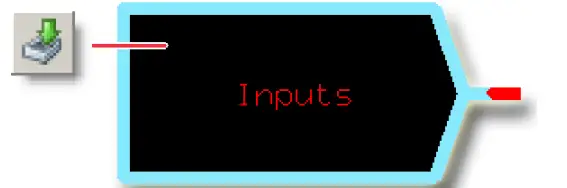
- Մուտքագրեք DigAn-ը, որն ընդունում է մուտքային ազդանշանը:

- Կատարեք այն փոփոխությունները, որոնք ցույց են տրված հետևյալ նկարում։
Ապրանքներ, որոնք մենք առաջարկում ենք
- Bent Axis Motors
- Փակ միացում առանցքային մխոցային պոմպեր և շարժիչներ
- Ցուցադրումներ
- Էլեկտրահիդրավլիկ ղեկ
- Էլեկտրահիդրավլիկա
- Հիդրավլիկ հոսանքի ղեկ
- Ինտեգրված համակարգեր
- Ջոյստիկներ և կառավարման բռնակներ
- Միկրոկարգավորիչներ և ծրագրային ապահովում
- Բաց շղթայի առանցքային մխոցային պոմպեր
- Orbital Motors
- PLUS+1® ՈՒՂԵՑՈՒՅՑ
- Համամասնական փականներ
- Սենսորներ
- ղեկ
- Տրանզիտ խառնիչ կրիչներ
Danfoss Power Solutions-ը բարձրորակ հիդրավլիկ և էլեկտրոնային բաղադրիչների համաշխարհային արտադրող և մատակարար է: Մենք մասնագիտացած ենք ժամանակակից տեխնոլոգիաների և լուծումների տրամադրման գործում, որոնք գերազանցում են շարժական արտաճանապարհային շուկայի ծանր աշխատանքային պայմաններում: Հիմնվելով մեր լայնածավալ կիրառական փորձի վրա՝ մենք սերտորեն համագործակցում ենք մեր հաճախորդների հետ՝ ապահովելու բացառիկ արդյունավետություն արտաճանապարհային տրանսպորտային միջոցների լայն շրջանակի համար:
Մենք օգնում ենք OEM-ներին ամբողջ աշխարհում արագացնել համակարգի զարգացումը, նվազեցնել ծախսերը և մեքենաներն ավելի արագ շուկա բերել:
Danfoss – Ձեր ամենաուժեղ գործընկերը շարժական հիդրավլիկ ոլորտում:
Գնալ դեպի www.powersolutions.danfoss.com արտադրանքի լրացուցիչ տեղեկությունների համար:
Այնտեղ, որտեղ աշխատում են արտաճանապարհային մեքենաները, նույնն է նաև Danfoss-ը: Մենք առաջարկում ենք փորձագիտական աջակցություն մեր հաճախորդներին ամբողջ աշխարհում՝ ապահովելով լավագույն հնարավոր լուծումները ակնառու կատարման համար: Գլոբալ սպասարկման գործընկերների լայն ցանցի շնորհիվ մենք նաև տրամադրում ենք համապարփակ գլոբալ ծառայություն մեր բոլոր բաղադրիչների համար:
Խնդրում ենք կապվել Danfoss Power Solution-ի ձեզ մոտակա ներկայացուցչի հետ:
Comatrol
www.comatrol.com
Schwarzmüller-Inverter www.schwarzmueller-inverter.com
Տուրոլա
www.turollaocg.com
Վալմովա
www.valmova.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss www.daikin-sauer-danfoss.com
Դանֆոսս
Power Solutions (US) Company 2800 East 13th Street
Էյմս, IA 50010, ԱՄՆ
Հեռախոս: +1 515 239 6000
Դանֆոսս
Power Solutions GmbH & Co. OHG Krokamp 35
D-24539 Neumünster, Գերմանիա Հեռ.՝ +49 4321 871 0
Դանֆոսս
Power Solutions ApS Nordborgvej 81
DK-6430 Nordborg, Դանիա Հեռ.՝ +45 7488 2222
Դանֆոսս
Power Solutions (Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd Jin Qiao, Pudong New District Շանհայ, Չինաստան 201206 Հեռ.՝ +86 21 3418 5200
Danfoss-ը պատասխանատվություն չի կրում կատալոգների, բրոշյուրների և այլ տպագիր նյութերի հնարավոր սխալների համար: Danfoss-ն իրեն իրավունք է վերապահում փոփոխել իր արտադրանքը առանց ծանուցման: Սա վերաբերում է նաև արդեն իսկ պատվիրված ապրանքներին, պայմանով, որ նման փոփոխությունները կարող են կատարվել առանց արդեն համաձայնեցված բնութագրերում փոփոխությունների անհրաժեշտության:
Այս նյութի բոլոր ապրանքային նշանները պատկանում են համապատասխան ընկերություններին: Danfoss-ը և Danfoss-ի լոգոտիպը Danfoss A/S-ի ապրանքանիշերն են: Բոլոր իրավունքները պաշտպանված են.
L1429328 • Rev AA • Դեկտեմբեր 2014 թ
www.danfoss.com
© Danfoss A/S, 2014 թ
Փաստաթղթեր / ռեսուրսներ
 |
Danfoss-ի համապատասխան EMD Speed Direction Function Block [pdf] Օգտագործողի ձեռնարկ Համապատասխան EMD Speed Direction Function Block, Speed Direction Function Block, Direction Function Block, Function Block, Block |



