Danfoss 호환 EMD 속도 방향 기능 블록
명세서
- 제품 이름: PLUS+1 호환 EMD 속도 센서 방향 기능 블록
- 출력: RPM 및 방향 신호
- 입력 범위 :
- 속도(Spd): 1,250 ~ 10,000,000
- 방향(Dir In): 0~5,250V
제품 사용 지침
컨트롤러 구성
EMD_SPD_DIR 함수 블록은 EMD 속도 센서의 입력에 따라 rpm 및 방향 신호를 출력합니다. MC 및 SC 컨트롤러에서 모두 사용할 수 있습니다.
컨트롤러 입력 요구 사항
EMD SPD DIR 기능 블록에 대한 컨트롤러 입력 요구 사항은 다음과 같습니다.
- MC 컨트롤러:
- Spd – MFIn – DirIn
- SC 컨트롤러:
- Spd – MFIn – DirIn – DigAn
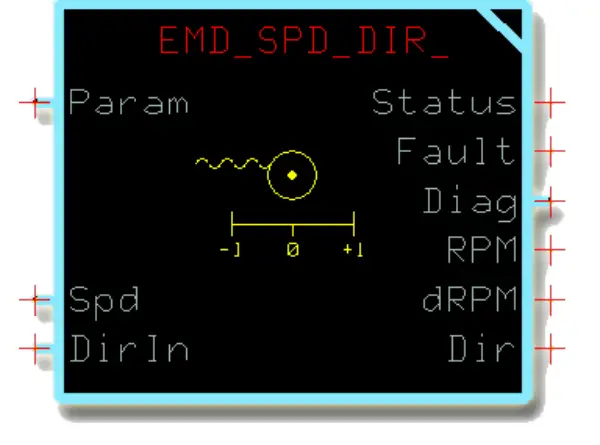
기능 블록 입력
EMD_SPD_DIR 기능 블록 입력은 다음과 같습니다.
- 속도(Spd): 버스당 U32 카운트 U16 – 범위:
1,250에서 10,000,000까지 - Dir In (방향): 버스 전압/볼트tage U16 –
범위: 0~5,250V
기능 블록 출력
EMD_SPD_DIR 기능 블록 출력은 다음과 같습니다.
- 상태: U16 – 범위: 0 ~ 65,535
- 잘못: U16 – 범위: 0 ~ 1,000,000,000
- 분당 회전수: U16 – 범위: 0 ~ 25,000
- dRPM: U16 – 범위: 0 ~ 2,500
- 감독: S8 – 값: -1, 0, +1
자주 묻는 질문
- EMD_SPD_DIR 함수 블록의 목적은 무엇입니까?
EMD_SPD_DIR 기능 블록은 EMD 속도 센서의 입력을 기반으로 RPM 및 방향 신호를 출력합니다. - MC 컨트롤러의 EMD_SPD_DIR 기능 블록에 대한 입력 요구 사항은 무엇입니까?
MC 컨트롤러의 입력 요구 사항은 Spd, MFIn 및 DirIn입니다. - 볼륨은 무엇입니까?tagEMD_SPD_DIR 기능 블록의 방향 입력(Dir In) 범위는 무엇입니까?
권tag방향 입력 범위는 0~5,250V입니다.
개정 내역
개정 표
| 날짜 | 변경됨 | 회전 |
| 2014년 XNUMX월 | AA |
EMD_SPD_DIR 함수 블록
위에view
이 기능 블록은 EMD 속도 센서의 입력을 기반으로 rpm 및 방향 신호를 출력합니다. MC 및 SC 컨트롤러에서 이 기능 블록은 다음을 수신합니다.
- MFIn 입력을 통한 Spd 입력.
- 두 번째 MFIn 입력 또는 DigAn 입력을 통한 DirIn 입력.
EMD 기능 블록에 대한 컨트롤러 입력 요구 사항
다음 표에는 EMD SPD DIR, EMD SPD DIR A 및 EMD SPD DIR D 기능 블록에 대한 컨트롤러 입력 요구 사항이 나열되어 있습니다.
입력 연결 - MC 컨트롤러
| 기능 블록 | 기능 블록 입력 | 컨트롤러 입력 | 논평 |
| EMD SPD 방향 | 속도 | 엠피인 | 센서의 펄스 신호를 통해 속도를 결정합니다. |
| 디르인 | 엠피인 | 풀업/풀다운 저항과 볼륨을 활용합니다.tage는 방향 신호의 개방 회로 고장을 감지합니다. | |
| EMD SPD 방향 A | 속도 | 엠피인 | 센서의 펄스 신호를 통해 속도를 결정합니다. |
| 디르인 | 디그안 | 방향 신호 볼륨만 감지합니다.tage는 예상 범위를 벗어나지만 개방 회로 감지를 위한 풀업/풀다운 저항이 없습니다. | |
| 안인 | 방향 신호 볼륨만 감지합니다.tage는 예상 범위를 벗어나지만 개방 회로 감지를 위한 풀업/풀다운 저항이 없습니다. | ||
| EMD SPD 방향 D | 속도 | 엠피인 | 센서의 펄스 신호를 통해 속도를 결정합니다. |
| 디그디르 | 디그인 | 방향 신호에 대한 오류 감지 기능을 제공하지 않습니다. | |
| 디그안 | 방향 신호에 대한 오류 감지 기능을 제공하지 않습니다. |
입력 연결 - SC 컨트롤러
| 기능 블록 | 기능 블록 입력 | 컨트롤러 입력 | 논평 |
| EMD SPD 방향 | 속도 | 엠피인 | 센서의 펄스 신호를 통해 속도를 결정합니다. 컨트롤러 입력은 레이블이 지정되어야 합니다. 디그/아나/프리크. |
| 디르인 | 엠피인 | 풀업/풀다운 저항과 볼륨을 활용합니다.tage는 방향 신호의 개방 회로 고장을 감지합니다. | |
| 디그안 | 풀업/풀다운 저항과 볼륨을 활용합니다.tage는 방향 신호의 개방 회로 고장을 감지합니다. |
기능 블록 입력
| 목 | 유형 | 범위 | 설명 |
| 파람 | 버스 | —— | 여러 기능 블록에 적용할 수 있는 공통 매개변수에 대한 입력입니다. 참조 매개변수 입력에 관하여 자세한 내용은 11페이지를 참조하세요. |
| 속도 | 버스 | —— | 버스에 대한 입력:
|
| 당 | 우32 | 1,250에서
10,000,000 |
측정된 주기 출력 속도 센서.
기능 블록은 다음을 사용합니다. 당 신호, 세다 신호, 그리고 펄스/회전 계산할 매개변수 값 회전수 출력. 10,000 = 1,000 μs. |
| 세다 | 우16 | 0에서 65,535까지 | 프로그램 루프당 측정된 카운트는 다음과 같습니다. 속도 센서.
기능 블록은 다음을 사용합니다. 당 신호, 세다 신호, 그리고 펄스/회전 계산할 매개변수 값 회전수 산출. 1,000 = 1,000. |
| 구성 | 지하철 버스 | —— | 이 입력을 구성하는 신호를 포함합니다. |
| 디렉 인 | 버스 | —— | 버스에 대한 입력:
|
| 볼트/볼륨tage | 우16 | 0에서 5,250까지 | 측정된 볼륨tag방향 신호의 e 속도 센서 블록이 방향을 결정하는 데 사용하는 출력입니다. |
| 구성 | 지하철 버스 | —— | 이 입력을 구성하는 신호를 포함합니다. |
출력
기능 블록 출력
| 목 | 유형 | 범위 | 설명 |
| 상태 | 우16 | —— | 기능 블록의 상태를 보고합니다.
이 기능 블록은 다음을 사용합니다. 비표준 비트 단위로 상태와 오류를 보고합니다.
|
| 잘못 | 우16 | —— | 기능 블록의 오류를 보고합니다.
이 기능 블록은 다음을 사용합니다. 비표준 비트 단위로 상태와 오류를 보고합니다.
|
| 다이어트 | 버스 | —— | 버스를 출력합니다 빈도, FltTmrDir, 그리고 FltTmrFreq 문제 해결에 사용할 수 있는 신호입니다. |
| 빈도 | 우32 | 0 대 1,000,
000,000 |
속도 센서의 측정된 주파수입니다. 100,000 = 10,000Hz. |
| 오류 시간 빈도 | 우16 | 0에서 65,535까지 | 주파수 오류가 발생하는 경우:
|
| FltTmrDir | 우16 | 0에서 65,535까지 | 방향 오류가 있는 경우:
|
| 회전수 | 우16 | 0에서 2,500까지 | 속도 센서는 분당 회전수입니다.
함수 블록 clamp이 출력은 2,500입니다. 1 = 1 rpm. |
| dRPM | 우16 | 0에서 25,000까지 | 속도 센서 분당 회전수 x 10(deciRPM). 기능 블록 clamp이 출력은 25,000입니다. |
| 감독 | S8 | -1, 0, +1 | 속도 센서의 회전 방향.
|
기능 블록 연결에 대하여
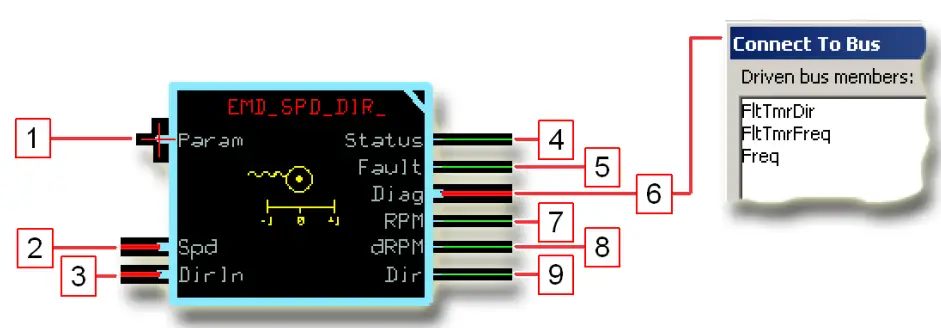
기능 블록 연결에 대하여
| 목 | 설명 |
| 1. | 여러 기능 블록에 적용할 수 있는 공통 매개변수에 대한 입력입니다. |
| 2. | 버스에 대한 입력:
|
| 3. | 버스에 대한 입력:
|
| 4. | 기능 블록의 상태를 보고합니다. |
| 5. | 기능 블록의 오류를 보고합니다. |
| 6. | 버스를 출력합니다 빈도, FltTmrDir, 그리고 FltTmrFreq 문제 해결에 사용할 수 있는 신호입니다. |
| 7. | 속도 센서는 분당 회전수입니다. |
| 8. | 속도 센서 분당 회전수 x 10(deciRPM). |
| 9. | 속도 센서의 회전 방향.
|
상태 및 오류 논리
대부분의 다른 PLUS+1 호환 기능 블록과 달리, 이 기능 블록은 비표준 상태 및 오류 코드를 사용합니다.
상태 논리
| 상태 | 마녀* | 이진법 | 원인 | 응답 | 보정 |
| 매개변수가 범위를 벗어났습니다. | 0x0008 | 1000 | 펄스/회전, 오류 DetTm, 또는 디르락Hz 매개변수가 범위를 벗어났습니다. | 함수 블록 clamp상한이나 하한의 범위를 벗어난 값입니다. | 범위를 벗어난 매개변수를 범위 내로 다시 가져옵니다. |
* 비트 16을 1로 설정하면 표준 Danfoss 상태 또는 오류 코드를 식별합니다.
오류 논리
| 잘못 | 마녀* | 이진법 | 원인 | 응답 | 지연† | 걸쇠‡ | 보정 |
| 당 함수 블록의 신호 속도 입력이 너무 낮습니다. | 0x0001 | 0001 | 당 신호 < 1,250Hz. | 함수 블록은 최대값을 출력합니다. 회전수 그리고 dRPM 가치. | Y | N | 전기적 노이즈와 같이 잘못된 결과를 초래할 수 있는 하드웨어 문제를 확인하세요. 당 신호 값. |
| 볼트/볼륨tage 함수 블록의 신호 속도 입력이 범위를 벗어났습니다. | 0x0002 | 0010 | 볼트/볼륨tage 신호는 1,000~2,500mV 사이입니다.
그리고 블록은 속도 센서로부터 펄스를 받지 않습니다. |
함수 블록은 다음을 설정합니다. 회전수 그리고 dRPM 0으로 출력됩니다. | Y | N | 전기적 노이즈와 같이 잘못된 결과를 초래할 수 있는 하드웨어 문제를 확인하세요. 볼트/볼륨tage 신호 값. |
| 볼트/볼륨tage 함수 블록의 신호 감독 입력이 범위를 벗어났습니다. | 0x0004 | 0100 | 볼트/볼륨tage 신호는 1,000~2,500 사이입니다
mV. |
함수 블록은 다음을 설정합니다. 감독 0으로 출력합니다. | Y | N | 전기적 노이즈와 같이 잘못된 결과를 초래할 수 있는 하드웨어 문제를 확인하세요. 볼트/볼륨tage 신호 값. |
* 비트 16을 1로 설정하면 표준 Danfoss 상태 또는 오류 코드를 식별합니다.
† 지연된 오류는 감지된 오류 조건이 지정된 지연 시간 동안 지속되는 경우 보고됩니다. 지연된 오류는 오류 조건이 지연 시간 동안 감지되지 않을 때까지 지울 수 없습니다.
‡ 기능 블록은 래치가 해제될 때까지 래치된 오류 보고서를 유지합니다.
함수 블록 매개변수
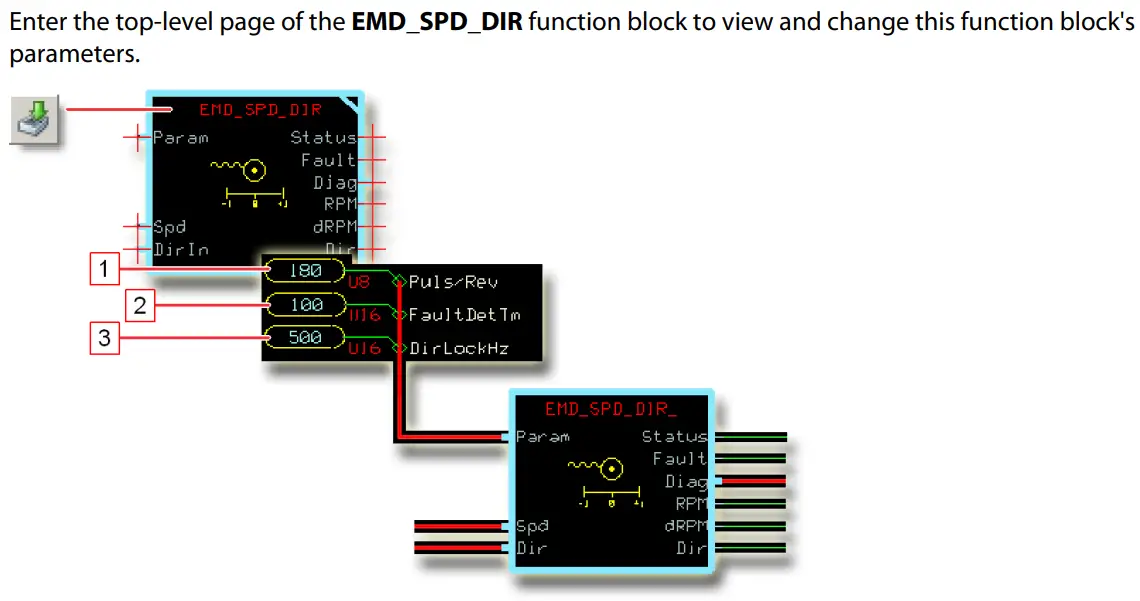
함수 블록 매개변수
| 목 | 유형 | 범위 | 설명 |
| 1. 펄스/회전 | U8 | 20~120, 180 | 속도 센서의 회전당 펄스 수. 다음을 참조하십시오. EMD 속도 센서 기술 정보 (Danfoss 부품 L1017287)에서 올바른 값을 확인하세요. |
| 2. FaultDetTm | 우16 | 0년~65,535년 | 기능 블록이 다음을 감지하는 시간을 설정합니다.
|
| 3. 디어락Hz | 우16 | 0년~8,000년 | 기능 블록의 주파수를 설정합니다. 감독 출력 잠금. 이 주파수 이상에서는 기능 블록이 방향의 변화를 보고하지 않습니다.
1,000 = 1,000Hz. |
매개변수 입력에 관하여
Param 입력을 사용하여 이 기능 블록에 외부 매개변수 값을 입력하세요.

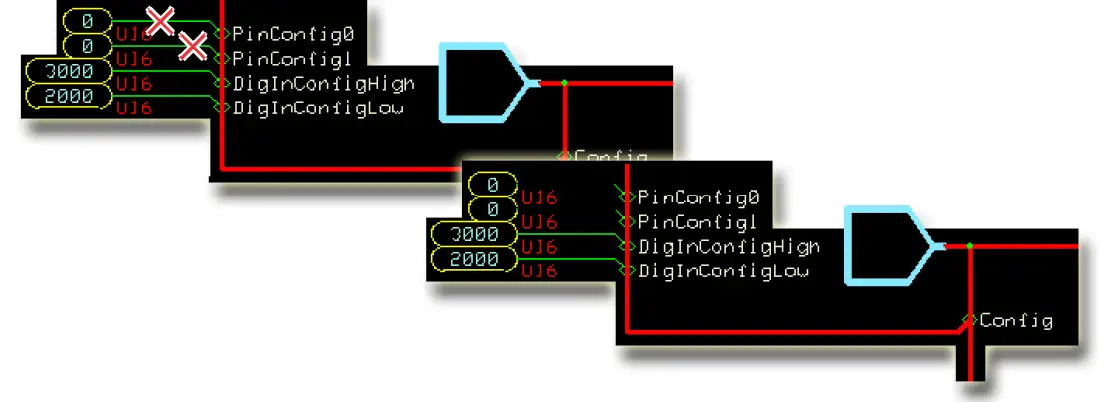
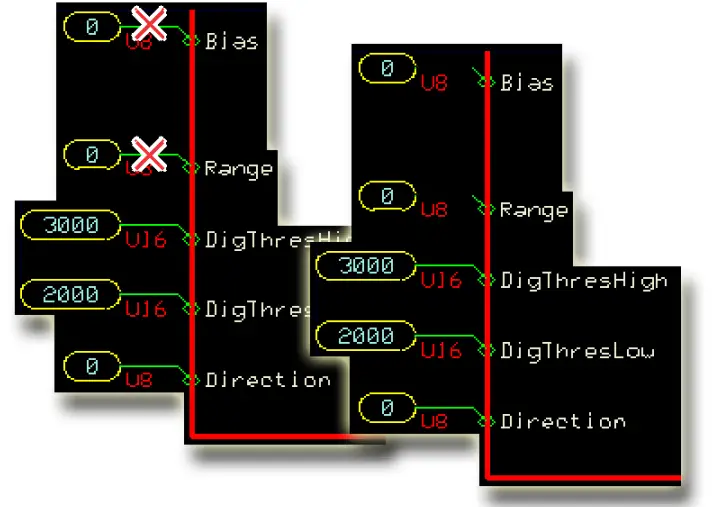
그림 세부 정보
| 목 | 설명 |
| 1. | 이 페이지를 수정하여 공통 매개변수를 허용하기 전에 함수 블록의 최상위 페이지 내부에서 파람 입력. |
| 2. | 이 페이지를 수정하여 공통 매개변수를 허용한 후 기능 블록의 최상위 페이지 내부에서 파람 입력. |
컨트롤러 구성
MC 및 SC 컨트롤러의 입력은 이 기능 블록과 함께 작동하기 위해 구성이 필요합니다. 참조:
- MC 컨트롤러 구성은 12페이지를 참조하세요.
- 16페이지의 SC 컨트롤러 구성.
MC 컨트롤러 구성
입력 구성
| 기능 블록 입력 | 호환 입력 유형 | 구성 작업 |
| 속도 | 엠피인 | 삭제하세요:
|
| 디르인 | 엠피인 | 삭제하세요:
|
| 디그안 | 삭제하세요:
|
컨트롤러 구성
Spd 입력을 위한 MFIn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.
- 입력 신호를 수신하는 MFIn을 입력합니다.
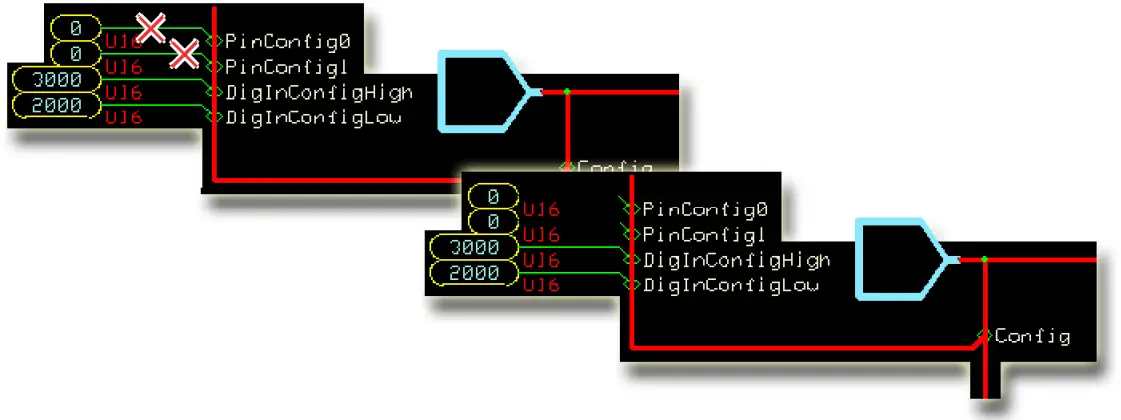
- 다음 그림에 표시된 대로 변경하세요.
컨트롤러 구성
DirIn 입력에 대한 MFIn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.
- 입력 신호를 수신하는 MFIn을 입력합니다.
- 다음 그림에 표시된 대로 변경하세요.
DirIn 입력을 위한 DigAn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.
- 입력 신호를 받는 DigAn 페이지로 들어갑니다.
- 다음 그림에 표시된 대로 변경하세요.

SC 컨트롤러 구성
입력 구성
| 기능 블록 입력 | 호환 입력 유형 | 구성 작업 |
| 속도 | 엠피인* | 삭제하세요:
|
| 디르인 | 엠피인 | 삭제하세요:
|
| 디그안 | 삭제하세요:
|
* 사용하는 MFIn에는 Dig/Ana/Freq라고 표시되어 있어야 합니다.
† 존재하는 경우.
Spd 입력을 위한 MFIn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.
- 입력 신호를 수신하는 MFIn을 입력합니다.
- 다음 그림에 표시된 대로 변경하세요.

DirIn 입력에 대한 MFIn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.

- 입력 신호를 수신하는 MFIn을 입력합니다.
- 다음 그림에 표시된 대로 변경하세요.

DirIn 입력을 위한 DigAn을 구성하는 방법
- GUIDE 템플릿에서 입력 페이지로 들어갑니다.
- 입력 신호를 수신하는 DigAn을 입력합니다.

- 다음 그림에 표시된 대로 변경하세요.
우리가 제공하는 제품
- 구부러진 축 모터
- 폐쇄 회로 축 피스톤 펌프 및 모터
- 디스플레이
- 전자유압식 파워 스티어링
- 전기유압
- 유압 파워 스티어링
- 통합 시스템
- 조이스틱 및 제어 핸들
- 마이크로컨트롤러 및 소프트웨어
- 개방형 축 피스톤 펌프
- 오비탈 모터스
- PLUS+1® 가이드
- 비례 밸브
- 센서
- 조종
- 대중교통 믹서 드라이브
Danfoss Power Solutions는 고품질 유압 및 전자 부품을 생산하는 글로벌 제조업체이자 공급업체입니다. 우리는 이동식 오프 하이웨이 시장의 혹독한 작동 조건에서 뛰어난 성능을 발휘하는 최첨단 기술과 솔루션을 전문적으로 제공합니다. 광범위한 응용 전문 지식을 바탕으로 우리는 고객과 긴밀히 협력하여 광범위한 오프로드 차량에 탁월한 성능을 보장합니다.
우리는 전 세계 OEM이 시스템 개발 속도를 높이고 비용을 절감하며 차량을 더 빨리 시장에 출시할 수 있도록 지원합니다.
Danfoss – 이동식 유압장치 분야의 가장 강력한 파트너.
이동하다 www.powersolutions.danfoss.com 자세한 제품 정보는 여기에서 확인하세요.
오프 하이웨이 차량이 작업하는 곳이면 어디든 Danfoss가 있습니다. 우리는 고객에게 전 세계적으로 전문적인 지원을 제공하여 탁월한 성능을 위한 최상의 솔루션을 보장합니다. 그리고 광범위한 글로벌 서비스 파트너 네트워크를 통해 당사의 모든 구성 요소에 대한 포괄적인 글로벌 서비스도 제공합니다.
가까운 Danfoss Power Solution 담당자에게 문의하십시오.
코마트롤
www.comatrol.com
슈바르츠뮐러-인버터 www.schwarzmueller-inverter.com
발모바
www.valmova.com
하이드로 기어
www.hydro-gear.com
다이킨-사우어-댄포스 www.daikin-sauer-danfoss.com
댄포스
전력 솔루션(미국) 회사 2800 East 13th Street
에임스, IA 50010, 미국
핸드폰: +1 515 239 6000
댄포스
Power Solutions GmbH & Co. OHG 크록amp 35
D-24539 독일 노이뮌스터 전화: +49 4321 871 0
댄포스
전력 솔루션 ApS Nordborgvej 81
DK-6430 Nordborg, 덴마크 전화: +45 7488 2222
댄포스
파워 솔루션(상하이) 유한회사
Building #22, No. 1000 Jin Hai Rd Jin Qiao, Pudong New District Shanghai, China 201206 전화: +86 21 3418 5200
Danfoss는 카탈로그, 브로셔 및 기타 인쇄물에 발생할 수 있는 오류에 대해 책임을 지지 않습니다. Danfoss는 사전 통지 없이 제품을 변경할 권리를 보유합니다. 이는 이미 합의된 사양을 변경할 필요 없이 그러한 변경이 이루어질 수 있는 경우 이미 주문한 제품에도 적용됩니다.
이 자료의 모든 상표는 해당 회사의 자산입니다. 댄포스 및 댄포스 로고타입은 댄포스 A/S의 상표입니다. 판권 소유.
L1429328 • Rev AA • 2014년 XNUMX월
www.danfoss.com
© 댄포스 A/S, 2014
문서 / 리소스
 |
Danfoss 호환 EMD 속도 방향 기능 블록 [PDF 파일] 사용자 매뉴얼 호환 EMD 속도 방향 기능 블록, 속도 방향 기능 블록, 방향 기능 블록, 기능 블록, 블록 |



