Bloque de función de dirección de velocidade conforme a Danfoss EMD
Especificacións
- Nome do produto: bloque de función de dirección do sensor de velocidade EMD compatible PLUS+1
- Saída: RPM e sinais direccionais
- Rango de entrada:
- Velocidade (Spd): 1,250 a 10,000,000
- Dirección (Dir In): 0 a 5,250 voltios
Instrucións de uso do produto
Configuración do controlador
O bloque de funcións EMD_SPD_DIR emite sinais de rpm e direccionais baseados nas entradas dun sensor de velocidade EMD. Pódese usar tanto en controladores MC como SC.
Requisitos de entrada do controlador
Os requisitos de entrada do controlador para o bloque de función EMD SPD DIR son os seguintes:
- Controladores MC:
- Spd – MFIn – DirIn
- Controladores SC:
- Spd – MFIn – DirIn – DigAn
Entradas de bloques de funcións
As entradas do bloque de funcións EMD_SPD_DIR son as seguintes:
- Velocidade (Velocidade): Autobuses por U32 Recuento U16 - Rango:
1,250 ao 10,000,000 - Dir In (dirección): Bus Volt/Voltage U16 -
Rango: 0 a 5,250 voltios
Saídas do bloque de funcións
As saídas do bloque de funcións EMD_SPD_DIR son as seguintes:
- Estado: U16 – Rango: 0 a 65,535
- Fallo: U16 – Rango: 0 a 1,000,000,000
- RPM: U16 – Rango: 0 a 25,000
- dRPM: U16 – Rango: 0 a 2,500
- Dir: S8 – Valores: -1, 0, +1
FAQ
- Cal é o propósito do bloque de funcións EMD_SPD_DIR?
O bloque de funcións EMD_SPD_DIR emite sinais de rpm e direccionais baseados nas entradas dun sensor de velocidade EMD. - Cales son os requisitos de entrada para o bloque de funcións EMD_SPD_DIR nos controladores MC?
Os requisitos de entrada para os controladores MC son Spd, MFIn e DirIn. - Cal é o voltagO rango para a entrada de dirección (Dir In) do bloque de funcións EMD_SPD_DIR?
O voltagO rango para a entrada de dirección é de 0 a 5,250 voltios.
Historial de revisións
Táboa de revisións
| Data | Cambiado | Rev |
| Decembro 2014 | AA |
Bloque de funcións EMD_SPD_DIR
Acabadoview
Este bloque de función emite sinais de rpm e direccionais baseados nas entradas dun sensor de velocidade EMD. En ambos os controladores MC e SC, este bloque de función recibe o seu:
- Entrada SPD a través dunha entrada MFIn.
- Entrada DirIn mediante unha segunda entrada MFIn ou unha entrada DigAn.
Requisitos de entrada do controlador para bloques de función EMD
As seguintes táboas enumeran os requisitos de entrada do controlador para os bloques de función EMD SPD DIR, EMD SPD DIR A e EMD SPD DIR D.
Conexións de entrada: controladores MC
| Bloque de funcións | Entrada do bloque de funcións | Entrada do controlador | Comenta |
| EMD SPD DIR | Spd | MIn | Determina a velocidade mediante o sinal de pulso do sensor. |
| DirIn | MIn | Utiliza resistencias pull-up/pull-down e voltage para detectar fallos de circuíto aberto do sinal de dirección. | |
| EMD SPD DIR A | Spd | MIn | Determina a velocidade mediante o sinal de pulso do sensor. |
| DirIn | DigAn | Só detecta cando o sinal de dirección voltage está fóra dos intervalos esperados pero carece de resistencias pull-up/pull-down para a detección de circuítos abertos. | |
| AnIn | Só detecta cando o sinal de dirección voltage está fóra dos intervalos esperados pero carece de resistencias pull-up/pull-down para a detección de circuítos abertos. | ||
| EMD SPD DIR D | Spd | MIn | Determina a velocidade mediante o sinal de pulso do sensor. |
| DigDir | DigIn | Non proporciona detección de fallos para o sinal de dirección. | |
| DigAn | Non proporciona detección de fallos para o sinal de dirección. |
Conexións de entrada: controladores SC
| Bloque de funcións | Entrada do bloque de funcións | Entrada do controlador | Comenta |
| EMD SPD DIR | Spd | MIn | Determina a velocidade mediante o sinal de pulso do sensor. A entrada do controlador debe estar etiquetada Dig/Ana/Freq. |
| DirIn | MIn | Utiliza resistencias pull-up/pull-down e voltage para detectar fallos de circuíto aberto do sinal de dirección. | |
| DigAn | Utiliza resistencias pull-up/pull-down e voltage para detectar fallos de circuíto aberto do sinal de dirección. |
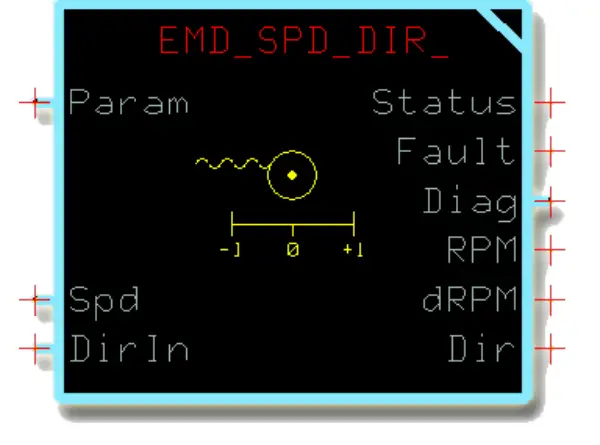
Entradas de bloques de funcións
| Elemento | Tipo | Rango | Descrición |
| Parám | Autobús | —— | Entrada para parámetros comúns que se poden aplicar a varios bloques de función. Vexa Acerca da entrada de parámetros na páxina 11 para obter máis información. |
| Spd | Autobús | —— | Entrada para un autobús con:
|
| Per | U32 | 1,250 a
10,000,000 |
A saída do período medido polo Sensor de velocidade.
O bloque de funcións usa o Per sinal, Conta sinal, e Puls/Rev valor do parámetro para calculalo RPM saída. 10,000 = 1,000 μs. |
| Conta | U16 | 0 ao 65,535 | O reconto medido por saída do bucle do programa Sensor de velocidade.
O bloque de funcións usa o Per sinal, Conta sinal, e Puls/Rev valor do parámetro para calculalo RPM saída. 1,000 = 1,000. |
| Config | Subbus | —— | Contén os sinais que configuran esta entrada. |
| Dir In | Autobús | —— | Entrada para un autobús con:
|
| Volt/Voltage | U16 | 0 ao 5,250 | O vol. medidotage do sinal de dirección que o Sensor de velocidade saídas, que o bloque usa para determinar a dirección. |
| Config | Subbus | —— | Contén os sinais que configuran esta entrada. |
Saídas
Saídas do bloque de funcións
| Elemento | Tipo | Rango | Descrición |
| Estado | U16 | —— | Informa o estado do bloque de funcións.
Este bloque de funcións usa a non estándar esquema bit a bit para informar do seu estado e fallos.
|
| Fallo | U16 | —— | Informa os fallos do bloque de funcións.
Este bloque de funcións usa a non estándar esquema bit a bit para informar do seu estado e fallos.
|
| Diag | Autobús | —— | Sae un bus con Frec, FltTmrDir, e FltTmrFreq sinais dispoñibles para a resolución de problemas. |
| Frec | U32 | 0 a 1,000,
000,000 |
A frecuencia medida do sensor de velocidade. 100,000 = 10,000 Hz. |
| FaultTmrFreq | U16 | 0 ao 65,535 | Cando se produce un fallo de frecuencia:
|
| FltTmrDir | U16 | 0 ao 65,535 | Cando se produce un fallo de dirección:
|
| RPM | U16 | 0 ao 2,500 | Sensor de velocidade de revolucións por minuto.
O bloque de función clamps esta saída en 2,500. 1 = 1 rpm. |
| dRPM | U16 | 0 ao 25,000 | Revolucións do sensor de velocidade por minuto x 10 (deciRPM). O bloque de función clamps esta saída en 25,000. |
| Dir | S8 | -1, 0, +1 | A dirección de rotación do sensor de velocidade.
|
Acerca das conexións de bloques de funcións
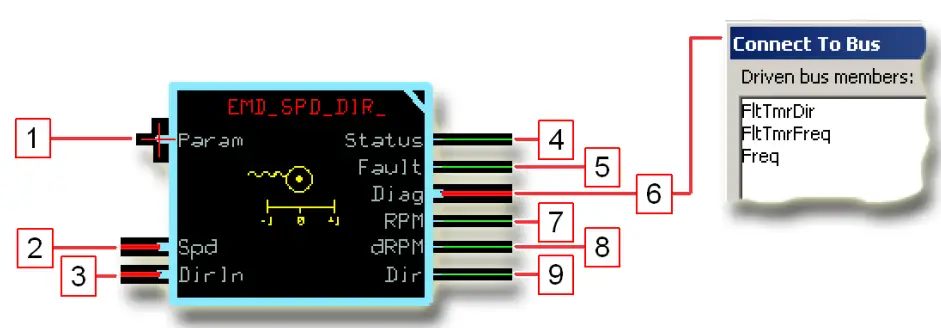
Acerca das conexións de bloques de funcións
| Elemento | Descrición |
| 1. | Entrada para parámetros comúns que se poden aplicar a varios bloques de función. |
| 2. | Entrada para un autobús con:
|
| 3. | Entrada para un autobús con:
|
| 4. | Informa o estado do bloque de funcións. |
| 5. | Informa os fallos do bloque de funcións. |
| 6. | Sae un bus con Frec, FltTmrDir, e FltTmrFreq sinais dispoñibles para a resolución de problemas. |
| 7. | Sensor de velocidade de revolucións por minuto. |
| 8. | Revolucións do sensor de velocidade por minuto x 10 (deciRPM). |
| 9. | A dirección de rotación do sensor de velocidade.
|
Estado e lóxica de fallo
A diferenza da maioría dos outros bloques de función compatibles con PLUS+1, este bloque de funcións usa códigos de estado e fallos non estándar.
Lóxica de estado
| Estado | Hex* | Binario | Causa | Resposta | Corrección |
| Un parámetro está fóra do intervalo. | 0x0008 | 1000 | Puls/Rev, FaultDetTm, ou DirLockHz o parámetro está fóra do intervalo. | O bloque de función clamps o valor fóra do intervalo no seu límite superior ou inferior. | Recuperar o parámetro fóra de intervalo dentro do seu intervalo. |
* O bit 16 establecido en 1 identifica un código de falla ou estado estándar de Danfoss.
Lóxica de fallos
| Fallo | Hex* | Binario | Causa | Resposta | Atraso† | Pestillo‡ | Corrección |
| Per sinal no bloque de funcións Spd a entrada é demasiado baixa. | 0x0001 | 0001 | Per sinal < 1,250 Hz. | O bloque de función sae o seu máximo RPM e dRPM valores. | Y | N | Comprobe se hai problemas de hardware, como ruído eléctrico, que poidan producir un inválido Per valor do sinal. |
| Volt/Voltage sinal no bloque de funcións Spd a entrada está fóra do rango. | 0x0002 | 0010 | Volt/Voltage o sinal está entre 1,000 e 2,500 mV
e o bloque non recibe pulsos do sensor de velocidade. |
O bloque de funcións establece o seu RPM e dRPM saídas a 0. | Y | N | Comprobe se hai problemas de hardware, como ruído eléctrico, que poidan producir un inválido Volt/ Voltage valor do sinal. |
| Volt/Voltage sinal no bloque de funcións Dir a entrada está fóra do rango. | 0x0004 | 0100 | Volt/Voltage o sinal está entre 1,000 e 2,500
mV. |
O bloque de funcións establece o seu Dir saída a 0. | Y | N | Comprobe se hai problemas de hardware, como ruído eléctrico, que poidan producir un inválido Volt/ Voltage valor do sinal. |
* O bit 16 establecido en 1 identifica un código de falla ou estado estándar de Danfoss.
† Infórmase dun fallo atrasado se a condición de fallo detectada persiste durante un tempo de atraso especificado. Un fallo atrasado non se pode borrar ata que a condición de fallo non se detecte durante o tempo de atraso.
‡ O bloque de funcións mantén un informe de fallo ata que se solta o pestillo.
Parámetros do bloque de funcións
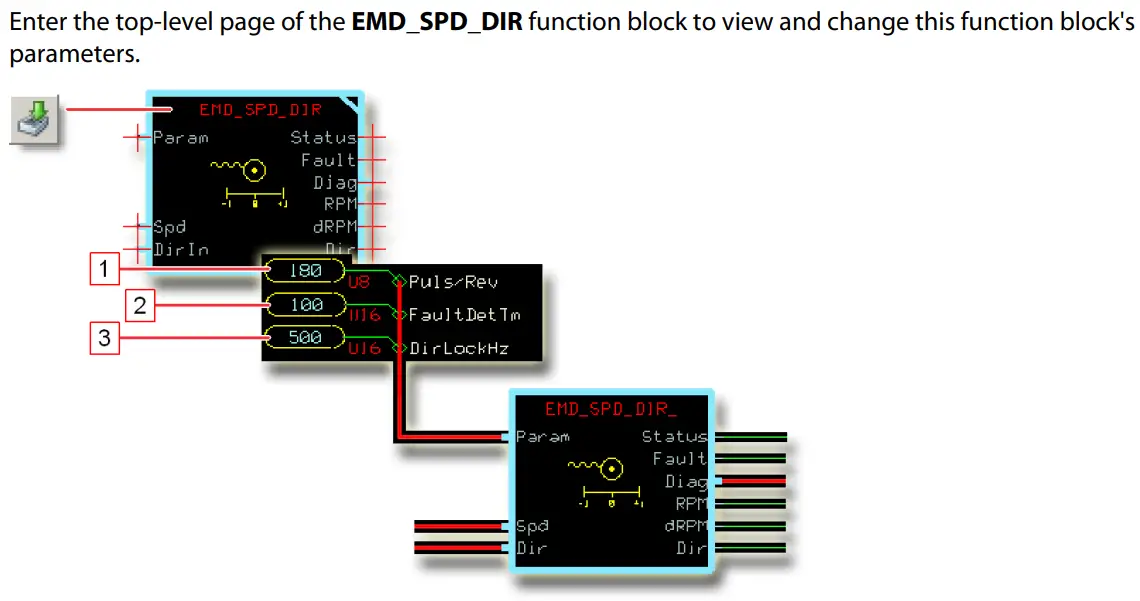
Parámetros do bloque de funcións
| Elemento | Tipo | Rango | Descrición |
| 1. Puls/Rev | U8 | 20–120, 180 | Número de pulsos por revolución do sensor de velocidade. Consulte o Información técnica do sensor de velocidade EMD (parte de Danfoss L1017287) para o valor correcto. |
| 2. FaultDetTm | U16 | 0–65,535 | Establece o tempo entre cando o bloque de función detecta:
|
| 3. DirLockHz | U16 | 0–8,000 | Establece a frecuencia por riba da cal está o bloque de funcións Dir bloqueos de saída. Por encima desta frecuencia, o bloque de funcións non informa de cambios de dirección.
1,000 = 1,000 Hz. |
Acerca da entrada de parámetros
Use a entrada Param para introducir valores de parámetros externos a este bloque de funcións.

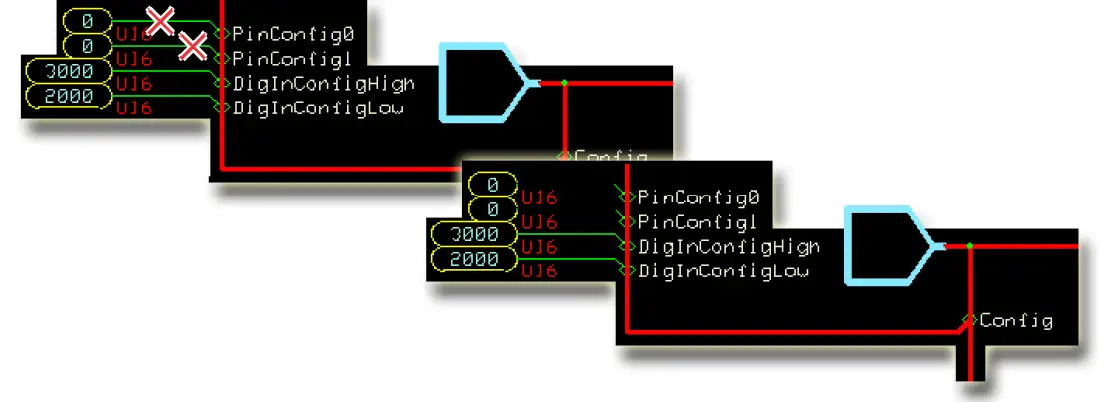
Detalles da figura
| Elemento | Descrición |
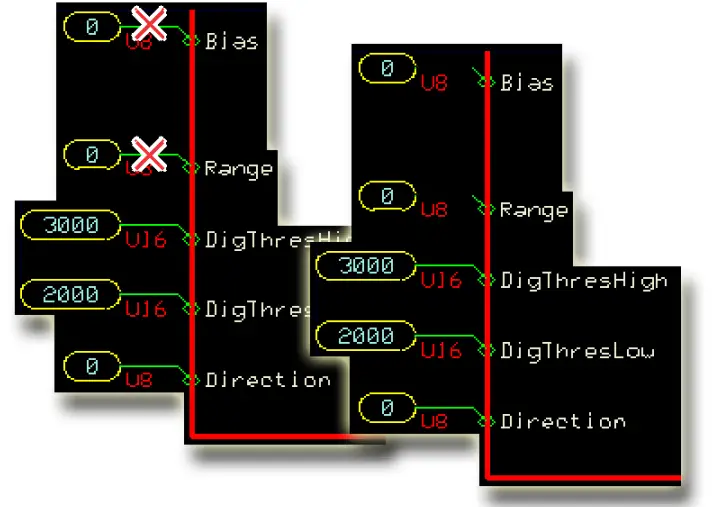
| 1. | Dentro da páxina de nivel superior do bloque de funcións antes de modificar esta páxina para aceptar parámetros comúns a través da súa Parám entrada. |
| 2. | Dentro da páxina de nivel superior do bloque de funcións despois de modificar esta páxina para aceptar parámetros comúns a través da súa Parám entrada. |
Configuración do controlador
As entradas dos controladores MC e SC requiren configuración para funcionar con este bloque de funcións. Ver:
- Configuración do controlador MC na páxina 12.
- Configuración do controlador SC na páxina 16.
Configuración do controlador MC
Configuracións de entrada
| Entrada do bloque de funcións | Tipo de entrada compatible | Acción de configuración |
| Spd | MIn | Eliminar:
|
| DirIn | MIn | Eliminar:
|
| DigAn | Eliminar:
|
Configuración do controlador
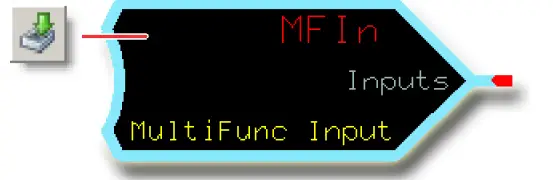
Como configurar un MFIn para a entrada Spd
- No modelo GUÍA, ingrese á páxina Entradas.
- Introduza o MFIn que recibe o sinal de entrada.
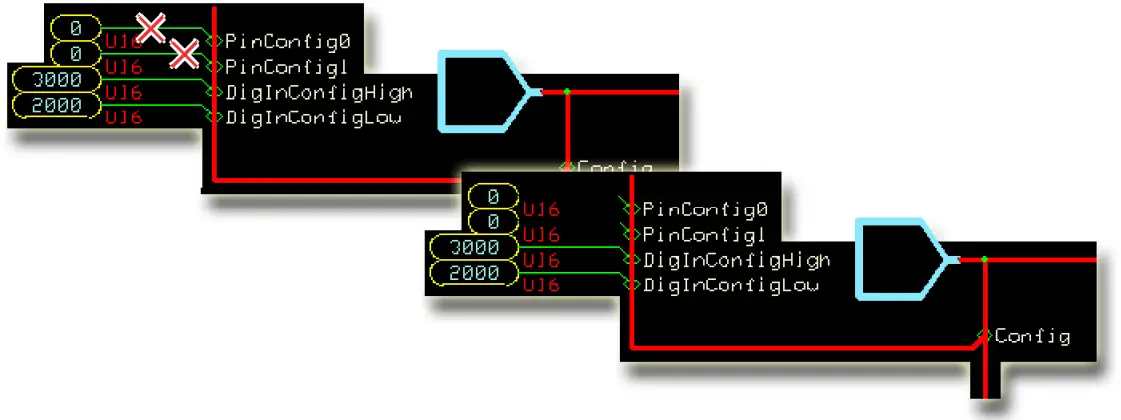
- Fai os cambios que se mostran na seguinte figura.
Configuración do controlador
Como configurar un MFIn para a entrada DirIn
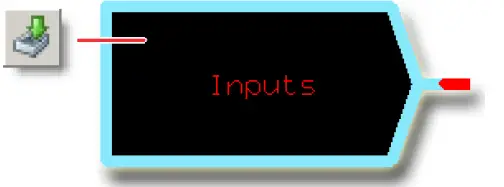
- No modelo GUÍA, ingrese á páxina Entradas.
- Introduza o MFIn que recibe o sinal de entrada.
- Fai os cambios que se mostran na seguinte figura.
Como configurar un DigAn para a entrada DirIn
- No modelo GUÍA, ingrese á páxina Entradas.
- Entra na páxina DigAn que recibe o sinal de entrada.
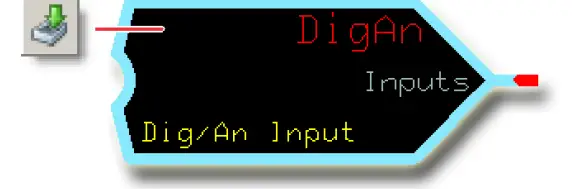
- Fai os cambios que se mostran na seguinte figura.

Configuración do controlador SC
Configuracións de entrada
| Entrada do bloque de funcións | Tipo de entrada compatible | Acción de configuración |
| Spd | MIn* | Eliminar:
|
| DirIn | MIn | Eliminar:
|
| DigAn | Eliminar:
|
* O MFIn que usa debe estar etiquetado como Dig/Ana/Freq.
† Se está presente.
Como configurar un MFIn para a entrada Spd
- No modelo GUÍA, ingrese á páxina Entradas.
- Introduza o MFIn que recibe o sinal de entrada.
- Fai os cambios que se mostran na seguinte figura.

Como configurar un MFIn para a entrada DirIn
- No modelo GUÍA, ingrese á páxina Entradas.

- Introduza o MFIn que recibe o sinal de entrada.
- Fai os cambios que se mostran na seguinte figura.

Como configurar un DigAn para a entrada DirIn
- No modelo GUÍA, ingrese á páxina Entradas.
- Introduza o DigAn que recibe o sinal de entrada.

- Fai os cambios que se mostran na seguinte figura.
Produtos que ofrecemos
- Motores de eixo curvado
- Bombas e motores de pistóns axiais de circuíto pechado
- Exhibidores
- Dirección asistida electrohidráulica
- Electrohidráulica
- Dirección asistida hidráulica
- Sistemas Integrados
- Joysticks e asas de control
- Microcontroladores e Software
- Bombas de pistóns axiais de circuíto aberto
- Motores orbitais
- GUÍA PLUS+1®
- Válvulas proporcionais
- Sensores
- Dirección
- Unidades mesturadoras de tránsito
Danfoss Power Solutions é un fabricante e provedor global de compoñentes electrónicos e hidráulicos de alta calidade. Somos especializados en ofrecer tecnoloxía e solucións de última xeración que sobresaen nas duras condicións de funcionamento do mercado móbil fóra da estrada. A partir da nosa ampla experiencia en aplicacións, traballamos en estreita colaboración cos nosos clientes para garantir un rendemento excepcional para unha ampla gama de vehículos todoterreo.
Axudamos aos fabricantes de equipos originales de todo o mundo a acelerar o desenvolvemento do sistema, reducir custos e levar os vehículos ao mercado máis rápido.
Danfoss: o teu socio máis forte en hidráulica móbil.
Ir a www.powersolutions.danfoss.com para obter máis información sobre o produto.
Donde queira que traballen os vehículos fóra da estrada, tamén o está Danfoss. Ofrecemos asistencia experta en todo o mundo para os nosos clientes, garantindo as mellores solucións posibles para un rendemento excepcional. E cunha ampla rede de socios de servizos globais, tamén ofrecemos un servizo global integral para todos os nosos compoñentes.
Póñase en contacto co representante de Danfoss Power Solution máis próximo.
Comatrol
www.comatrol.com
Schwarzmüller-Inverter www.schwarzmueller-inverter.com
Turolla
www.turollaocg.com
Valmova
www.valmova.com
Hidro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss www.daikin-sauer-danfoss.com
Danfoss
Power Solutions Company (EE. UU.) 2800 East 13th Street
Ames, IA 50010, USA
Teléfono: +1 515 239 6000
Danfoss
Power Solutions GmbH & Co. OHG Krokamp 35
D-24539 Neumünster, Alemaña Teléfono: +49 4321 871 0
Danfoss
Power Solutions ApS Nordborgvej 81
DK-6430 Nordborg, Dinamarca Teléfono: +45 7488 2222
Danfoss
Power Solutions (Shanghai) Co., Ltd.
Edificio #22, No. 1000 Jin Hai Rd Jin Qiao, Pudong New District Shanghai, China 201206 Teléfono: +86 21 3418 5200
Danfoss non se responsabiliza de posibles erros en catálogos, folletos e outro material impreso. Danfoss resérvase o dereito de modificar os seus produtos sen previo aviso. Isto tamén se aplica aos produtos xa encomendados, sempre que tales modificacións poidan realizarse sen que sexan necesarios cambios nas especificacións xa acordadas.
Todas as marcas rexistradas deste material son propiedade das respectivas empresas. Danfoss e o logotipo de Danfoss son marcas comerciais de Danfoss A/S. Todos os dereitos reservados.
L1429328 • Rev AA • Decembro 2014
www.danfoss.com
© Danfoss A/S, 2014
Documentos/Recursos
 |
Bloque de función de dirección de velocidade conforme a Danfoss EMD [pdfManual do usuario Bloque de función de dirección de velocidade conforme a EMD, bloque de función de dirección de velocidade, bloque de función de dirección, bloque de función, bloque |



