Danfoss準拠EMD速度方向機能ブロック
仕様
- 製品名: PLUS+1準拠EMDスピードセンサー方向ファンクションブロック
- 出力: RPMと方向信号
- 入力範囲:
- 速度(Spd):1,250~10,000,000
- 方向(Dir In): 0 ~ 5,250 ボルト
製品使用説明書
コントローラ構成
EMD_SPD_DIR ファンクション ブロックは、EMD スピード センサーからの入力に基づいて、rpm と方向信号を出力します。MC コントローラーと SC コントローラーの両方で使用できます。
コントローラー入力要件
EMD SPD DIR 機能ブロックのコントローラ入力要件は次のとおりです。
- MC コントローラー:
- Spd – MFIn – DirIn
- SC コントローラー:
- Spd – MFin – DirIn – DigAn
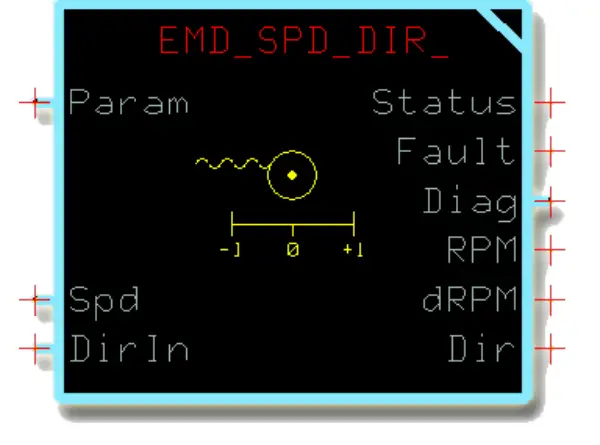
ファンクションブロック入力
EMD_SPD_DIR 関数ブロックの入力は次のとおりです。
- Spd(スピード): U32あたりのバス数 U16 – 範囲:
1,250から10,000,000 - 方向入力: バス電圧/電圧tagU16 –
範囲: 0~5,250ボルト
機能ブロック出力
EMD_SPD_DIR ファンクション ブロックの出力は次のとおりです。
- 状態: U16 – 範囲: 0 ~ 65,535
- 故障: U16 – 範囲: 0 ~ 1,000,000,000
- 回転数: U16 – 範囲: 0 ~ 25,000
- dRPM: U16 – 範囲: 0 ~ 2,500
- 監督: S8 – 値: -1、0、+1
よくある質問
- EMD_SPD_DIR 関数ブロックの目的は何ですか?
EMD_SPD_DIR ファンクション ブロックは、EMD スピード センサーからの入力に基づいて、rpm と方向信号を出力します。 - MC コントローラの EMD_SPD_DIR 機能ブロックの入力要件は何ですか?
MC コントローラの入力要件は、Spd、MFIn、および DirIn です。 - ボリュームはいくらですかtagEMD_SPD_DIR ファンクション ブロックの方向入力 (Dir In) の範囲は?
巻tag方向入力の範囲は 0 ~ 5,250 ボルトです。
改訂履歴
リビジョン一覧表
| 日付 | 変更 | 改訂 |
| 2014年XNUMX月 | AA |
EMD_SPD_DIR ファンクションブロック
以上view
この機能ブロックは、EMD スピード センサーからの入力に基づいて、rpm と方向信号を出力します。MC コントローラーと SC コントローラーの両方で、この機能ブロックは次の信号を受信します。
- MFIn 入力を介した Spd 入力。
- 2 番目の MFIn 入力または DigAn 入力のいずれかを介して DirIn 入力。
EMD機能ブロックのコントローラ入力要件
次の表は、EMD SPD DIR、EMD SPD DIR A、および EMD SPD DIR D 機能ブロックのコントローラー入力要件を示しています。
入力接続 - MC コントローラ
| 機能ブロック | ファンクションブロック入力 | コントローラ入力 | コメント |
| EMD SPD ディレクトリ | 速さ | MFイン | センサーからのパルス信号によって速度を決定します。 |
| ディリン | MFイン | プルアップ/プルダウン抵抗とボリュームを使用tage 方向信号の開回路障害を検出します。 | |
| EMD SPD 方向 A | 速さ | MFイン | センサーからのパルス信号によって速度を決定します。 |
| ディリン | ディガン | 方向信号ボリュームのときのみ検出tage は予想範囲外ですが、オープン回路検出用のプルアップ/プルダウン抵抗がありません。 | |
| アンイン | 方向信号ボリュームのときのみ検出tage は予想範囲外ですが、オープン回路検出用のプルアップ/プルダウン抵抗がありません。 | ||
| EMD SPD 方向 D | 速さ | MFイン | センサーからのパルス信号によって速度を決定します。 |
| ディグディル | ディグイン | 方向信号の障害検出は行いません。 | |
| ディガン | 方向信号の障害検出は行いません。 |
入力接続 - SC コントローラ
| 機能ブロック | ファンクションブロック入力 | コントローラ入力 | コメント |
| EMD SPD ディレクトリ | 速さ | MFイン | センサーからのパルス信号を介して速度を決定します。コントローラの入力にはラベルを付ける必要があります ディグ/アナ/周波数. |
| ディリン | MFイン | プルアップ/プルダウン抵抗とボリュームを使用tage 方向信号の開回路障害を検出します。 | |
| ディガン | プルアップ/プルダウン抵抗とボリュームを使用tage 方向信号の開回路障害を検出します。 |
ファンクションブロック入力
| アイテム | タイプ | 範囲 | 説明 |
| パラメータ | バス | —— | 複数の機能ブロックに適用できる共通パラメータの入力。 パラメータ入力について 詳細については11ページをご覧ください。 |
| 速さ | バス | —— | 次のバスの入力:
|
| パー | 32代 | 1,250から
10,000,000 |
測定期間出力は スピードセンサー.
ファンクションブロックは、 パー 信号、 カウント 信号、そして パルス/回転 パラメータ値を計算する 回転数 出力。10,000 = 1,000 μs。 |
| カウント | 16代 | 0から65,535 | プログラムループ出力ごとの計測カウントは、 スピードセンサー.
ファンクションブロックは、 パー 信号、 カウント 信号、そして パルス/回転 パラメータ値を計算する 回転数 出力。 1,000 = 1,000。 |
| 設定 | サブバス | —— | この入力を構成する信号が含まれます。 |
| ディレクターイン | バス | —— | 次のバスの入力:
|
| ボルト/ボルトtage | 16代 | 0から5,250 | 測定されたボリュームtag方向信号のe スピードセンサー ブロックが方向を決定するために使用する出力。 |
| 設定 | サブバス | —— | この入力を構成する信号が含まれます。 |
出力
機能ブロック出力
| アイテム | タイプ | 範囲 | 説明 |
| 状態 | 16代 | —— | ファンクションブロックのステータスを報告します。
このファンクションブロックは、 非標準 ステータスと障害を報告するためのビット単位のスキーム。
|
| 故障 | 16代 | —— | 機能ブロックの障害を報告します。
このファンクションブロックは、 非標準 ステータスと障害を報告するためのビット単位のスキーム。
|
| ダイアグ | バス | —— | バスを出力します 頻度, フライトマーカー、 そして フライトタイム周波数 トラブルシューティングに使用できる信号。 |
| 頻度 | 32代 | 0から1,000、
000,000 |
速度センサーの測定周波数。100,000 = 10,000 Hz。 |
| 障害周波数 | 16代 | 0から65,535 | 周波数障害が発生した場合:
|
| フライトマーカー | 16代 | 0から65,535 | 方向エラーの場合:
|
| 回転数 | 16代 | 0から2,500 | 速度センサーの回転数/分。
機能ブロックclampこの出力は 2,500 です。1 = 1 rpm です。 |
| dRPM | 16代 | 0から25,000 | 速度センサーの回転数/分 x 10 (deciRPM)。機能ブロックclampこの出力は 25,000 です。 |
| ディレクター | S8 | -1、0、+1 | スピードセンサーの回転方向。
|
ファンクションブロック接続について
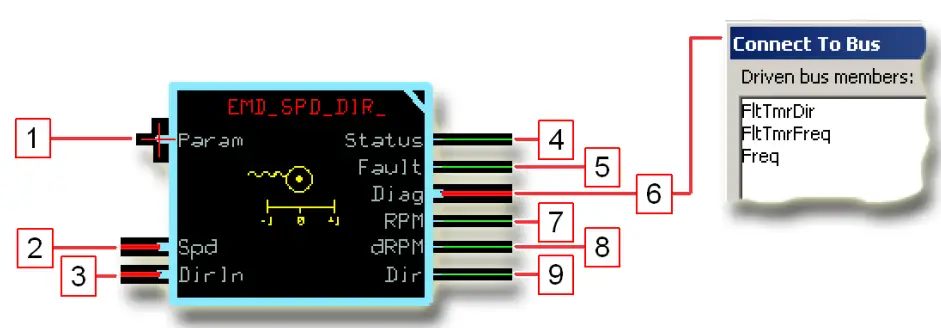
ファンクションブロック接続について
| アイテム | 説明 |
| 1. | 複数の機能ブロックに適用できる共通パラメータの入力。 |
| 2. | 次のバスの入力:
|
| 3. | 次のバスの入力:
|
| 4. | ファンクションブロックのステータスを報告します。 |
| 5. | 機能ブロックの障害を報告します。 |
| 6. | バスを出力します 頻度, フライトマーカー、 そして フライトタイム周波数 トラブルシューティングに使用できる信号。 |
| 7. | 速度センサーの回転数/分。 |
| 8. | 速度センサーの回転数/分 x 10 (deciRPM)。 |
| 9. | スピードセンサーの回転方向。
|
ステータスと障害ロジック
他のほとんどの PLUS+1 準拠機能ブロックとは異なり、この機能ブロックは非標準のステータス コードと障害コードを使用します。
ステータスロジック
| 状態 | ヘックス* | バイナリ | 原因 | 応答 | 修正 |
| パラメータが範囲外です。 | 0x0008 | 1000 | パルス/回転, 障害検出Tm、 または ディレクトリロックkHz パラメータが範囲外です。 | 機能ブロックclamp範囲外の値は上限または下限のいずれかになります。 | 範囲外のパラメータを範囲内に戻します。 |
* ビット 16 を 1 に設定すると、標準の Danfoss ステータスまたは障害コードが識別されます。
フォールトロジック
| 故障 | ヘックス* | バイナリ | 原因 | 応答 | 遅れ† | ラッチ‡ | 修正 |
| パー 機能ブロックの信号 速さ 入力が低すぎます。 | 0x0001 | 0001 | パー 信号 < 1,250 Hz。 | ファンクションブロックは最大値を出力します 回転数 そして dRPM 価値観。 | Y | N | 電気ノイズなど、無効な結果をもたらす可能性のあるハードウェアの問題がないか確認します。 パー 信号値。 |
| ボルト/ボルトtage 機能ブロックの信号 速さ 入力が範囲外です。 | 0x0002 | 0010 | ボルト/ボルトtage 信号は1,000~2,500 mV
そして ブロックは速度センサーからパルスを受信しません。 |
ファンクションブロックは、 回転数 そして dRPM 0 に出力します。 | Y | N | 電気ノイズなど、無効な結果をもたらす可能性のあるハードウェアの問題がないか確認します。 ボルト/ Voltage 信号値。 |
| ボルト/ボルトtage 機能ブロックの信号 ディレクター 入力が範囲外です。 | 0x0004 | 0100 | ボルト/ボルトtage 信号は1,000から2,500の間
mV。 |
ファンクションブロックは、 ディレクター 出力を0にします。 | Y | N | 電気ノイズなど、無効な結果をもたらす可能性のあるハードウェアの問題がないか確認します。 ボルト/ Voltage 信号値。 |
* ビット 16 を 1 に設定すると、標準の Danfoss ステータスまたは障害コードが識別されます。
† 検出された障害状態が指定された遅延時間にわたって継続する場合、遅延障害が報告されます。遅延障害は、障害状態が遅延時間にわたって検出されないままになるまでクリアできません。
‡ 機能ブロックは、ラッチが解除されるまでラッチされた障害レポートを維持します。
ファンクションブロックパラメータ
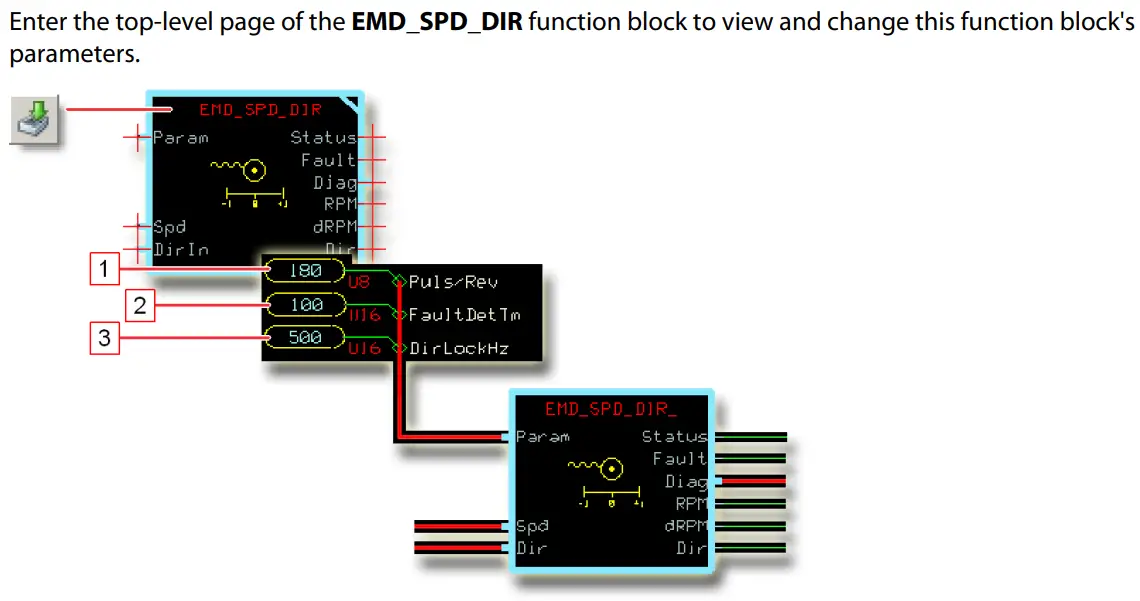
ファンクションブロックパラメータ
| アイテム | タイプ | 範囲 | 説明 |
| 1. パルス/回転 | U8 | 20–120, 180 | スピードセンサーの回転あたりのパルス数。 EMD スピードセンサー技術情報 正しい値については、(Danfoss 部品番号 L1017287) を参照してください。 |
| 2. フォルトデット | 16代 | 0–65,535 | ファンクション ブロックが以下を検出するまでの時間を設定します。
|
| 3. ディロックkHz | 16代 | 0–8,000 | ファンクションブロックの ディレクター 出力はロックされます。この周波数を超えると、関数ブロックは方向の変化を報告しません。
1,000 = 1,000 Hz。 |
パラメータ入力について
Param 入力を使用して、この関数ブロックに外部パラメータ値を入力します。

図の詳細
| アイテム | 説明 |
| 1. | このページを変更して共通パラメータを受け入れるようにする前に、関数ブロックのトップレベルページ内で パラメータ 入力。 |
| 2. | ファンクションブロックのトップレベルページ内で、このページを変更して、その パラメータ 入力。 |
コントローラ構成
MC および SC コントローラの入力は、この機能ブロックで動作するように構成する必要があります。参照:
- MC コントローラの構成 (12 ページ)。
- SC コントローラの構成 (16 ページ)。
MC コントローラ構成
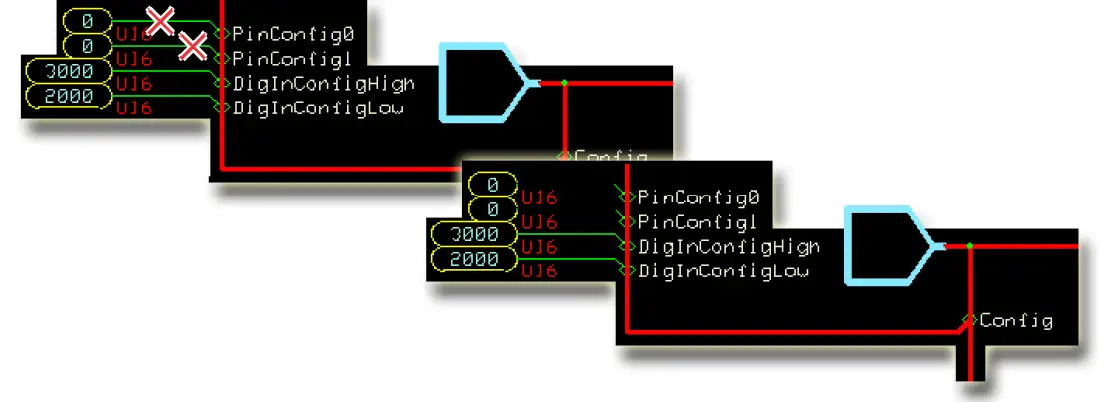
入力構成
| ファンクションブロック入力 | 対応入力タイプ | 構成アクション |
| 速さ | MFイン | 以下を削除します:
|
| ディリン | MFイン | 以下を削除します:
|
| ディガン | 以下を削除します:
|
コントローラ構成
Spd 入力用に MFIn を構成する方法
- GUIDE テンプレートで、入力ページに入ります。
- 入力信号を受信するMFInを入力します。
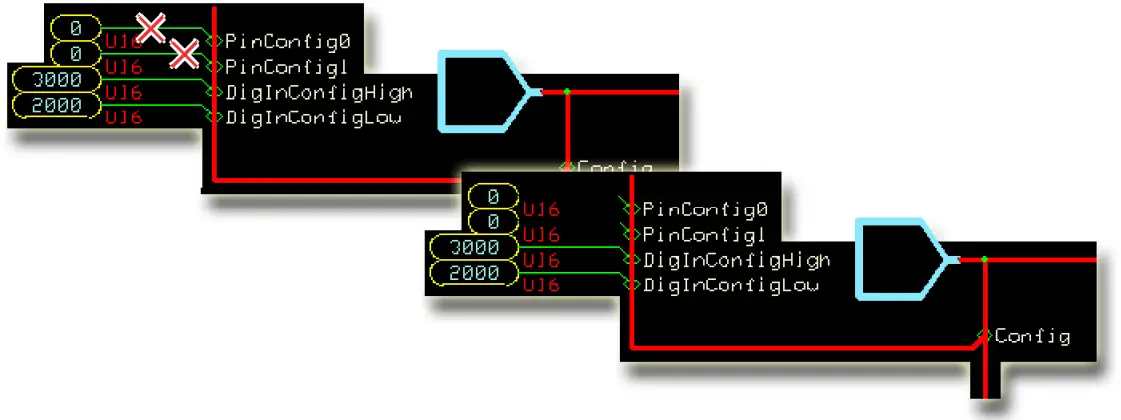
- 次の図に示す変更を加えます。
コントローラ構成
DirIn 入力用に MFIn を構成する方法
- GUIDE テンプレートで、入力ページに入ります。
- 入力信号を受信するMFInを入力します。
- 次の図に示す変更を加えます。
DirIn 入力用に DigAn を設定する方法
- GUIDE テンプレートで、入力ページに入ります。
- 入力信号を受信する DigAn ページに入ります。
- 次の図に示す変更を加えます。

SC コントローラ構成
入力構成
| ファンクションブロック入力 | 対応入力タイプ | 構成アクション |
| 速さ | MFイン* | 以下を削除します:
|
| ディリン | MFイン | 以下を削除します:
|
| ディガン | 以下を削除します:
|
* 使用する MFIn には Dig/Ana/Freq というラベルが付いている必要があります。
† 存在する場合。
Spd 入力用に MFIn を構成する方法
- GUIDE テンプレートで、入力ページに入ります。
- 入力信号を受信するMFInを入力します。
- 次の図に示す変更を加えます。

DirIn 入力用に MFIn を構成する方法
- GUIDE テンプレートで、入力ページに入ります。

- 入力信号を受信するMFInを入力します。
- 次の図に示す変更を加えます。

DirIn 入力用に DigAn を設定する方法
- GUIDE テンプレートで、入力ページに入ります。
- 入力信号を受信する DigAn を入力します。

- 次の図に示す変更を加えます。
私たちが提供する製品
- 屈曲軸モーター
- 閉回路アキシャルピストンポンプおよびモーター
- ディスプレイ
- 電動油圧式パワーステアリング
- 電気油圧装置
- 油圧パワーステアリング
- 統合システム
- ジョイスティックとコントロールハンドル
- マイクロコントローラーとソフトウェア
- 開回路アキシャルピストンポンプ
- 軌道モーター
- PLUS+1® ガイド
- 比例弁
- センサー
- 操舵
- トランジットミキサードライブ
Danfoss Power Solutions は、高品質の油圧コンポーネントおよび電子コンポーネントを提供する世界的なメーカーおよびサプライヤーです。当社は、モバイルオフハイウェイ市場の過酷な動作条件に優れた最先端のテクノロジーとソリューションを提供することに特化しています。広範なアプリケーションの専門知識に基づいて、当社はお客様と緊密に連携して、幅広いオフハイウェイ車両に優れたパフォーマンスを保証します。
当社は、世界中の OEM がシステム開発を加速し、コストを削減し、車両をより早く市場に投入できるよう支援します。
Danfoss – 移動式油圧の最強のパートナー。
へ移動 www.powersolutions.danfoss.com 詳しい製品情報についてはこちらをご覧ください。
オフハイウェイ車両が活躍する場所ならどこでも、ダンフォスも活躍します。当社はお客様に世界中で専門家によるサポートを提供し、卓越したパフォーマンスを実現する最善のソリューションを保証します。また、グローバル サービス パートナーの広範なネットワークにより、すべてのコンポーネントに対して包括的なグローバル サービスも提供します。
最寄りのダンフォス パワー ソリューション担当者にお問い合わせください。
コマトロール
ホームページ
シュヴァルツミュラーインバーター www.schwarzmueller-inverter.com
ツローラ
ホームページ
ヴァルモバ
www.valmova.com
ハイドロギア
www.ハイドロギア.com
ダイキンザウアーダンフォス www.daikin-sauer-danfoss.com
ダンフォス
Power Solutions (US) Company 2800 East 13th Street
エイムズ、IA 50010、米国
電話: +1 515 239 6000
ダンフォス
Power Solutions GmbH & Co. OHG Krokamp 35
D-24539 ノイミュンスター、ドイツ 電話: +49 4321 871 0
ダンフォス
パワー ソリューション ApS Nordborgvej 81
DK-6430 Nordborg、Denmark 電話: +45 7488 2222
ダンフォス
パワーソリューションズ(上海)有限公司
Building #22, No. 1000 Jin Hai Rd Jin Qiao, Pudong New District Shanghai, China 201206 電話: +86 21 3418 5200
ダンフォスは、カタログ、パンフレット、その他の印刷物に含まれる可能性のある誤りについては一切の責任を負いません。ダンフォスは、予告なく製品を変更する権利を留保します。これは、すでに合意された仕様の変更を必要とせずにそのような変更を行うことができる場合に限り、すでに注文されている製品にも当てはまります。
この資料に含まれるすべての商標は、それぞれの会社の所有物です。 Danfoss および Danfoss のロゴタイプは、Danfoss A/S の商標です。 全著作権所有。
L1429328 • Rev AA • 2014 年 XNUMX 月
www.ダンフォス.com
© Danfoss A/S、2014
ドキュメント / リソース
 |
Danfoss準拠EMD速度方向機能ブロック [pdf] ユーザーマニュアル 準拠EMD速度方向機能ブロック、速度方向機能ブロック、方向機能ブロック、機能ブロック、ブロック |



