Fronius RI MOD Compact Com ໂມດູນ

ຂໍ້ມູນຈໍາເພາະ
- ຊື່ຜະລິດຕະພັນ: RI FB PRO/i RI MOD/i CC Ethernet/IP-2P
- ຜູ້ຂາຍ: Fronius International GmbH
- ປະເພດອຸປະກອນ: ອະແດບເຕີການສື່ສານ
- ລະຫັດສິນຄ້າ: 0320 hex (800dez)
- ປະເພດຮູບພາບ: ຮູບພາບມາດຕະຖານ
- ປະເພດຕົວຢ່າງ: ການຜະລິດຕົວຢ່າງ
- ຕົວຢ່າງການບໍລິໂພກ: ການບໍລິໂພກຕົວຢ່າງ
- ຊື່ຕົວຢ່າງ: Fronius-FB-Pro-EtherNetIP(TM)
ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
ການຕັ້ງຄ່າທີ່ຢູ່ IP ຂອງໂມດູນລົດເມ
ທີ່ຢູ່ IP ຂອງໂມດູນລົດເມສາມາດຖືກກໍານົດໂດຍໃຊ້ປຸ່ມ DIP ໃນການໂຕ້ຕອບ:
- ກໍານົດທີ່ຢູ່ IP ພາຍໃນຂອບເຂດຂອງ 192.168.0.xx (ບ່ອນທີ່ xx ກົງກັບ DIP ປ່ຽນຕໍາແຫນ່ງຈາກ 1 ຫາ 63).
- ການຕັ້ງຄ່າສະຫຼັບ DIP ແລະທີ່ຢູ່ IP ທີ່ສອດຄ້ອງກັນ:
| DIP ປ່ຽນ | ທີ່ຢູ່ IP |
|---|---|
| OFF OFF OFF OFF OFF OFF ON | 1 |
| OFF OFF OFF OFF OFF ON OFF | 2 |
| OFF OFF OFF OFF ON ON | 3 |
| ON ON ເປີດ ON ປິດ | 62 |
| ON ON ON ON ON | 63 |
ປະເພດຂໍ້ມູນ ແລະການສ້າງແຜນທີ່ສັນຍານ
ຜະລິດຕະພັນໃຊ້ປະເພດຂໍ້ມູນຕໍ່ໄປນີ້:
- UINT16 (ຈຳນວນເຕັມທີ່ບໍ່ໄດ້ເຊັນ) – ໄລຍະ: 0 ຫາ 65535
- SINT16 (ຈຳນວນເຕັມທີ່ລົງນາມ) – ໄລຍະ: -32768 ຫາ 32767
ແຜນທີ່ທີ່ຢູ່ສຳລັບສັນຍານຂາເຂົ້າ ແລະ ຂາອອກ:
| ທີ່ຢູ່ | ປະເພດ | ລາຍລະອຽດ |
|---|---|---|
| 0-7 | ສັນຍານ BIT | ລາຍລະອຽດແຜນທີ່ສັນຍານ |
ທົ່ວໄປ
ຄວາມປອດໄພ
ຄຳເຕືອນ!
ອັນຕະລາຍຈາກການດໍາເນີນງານທີ່ບໍ່ຖືກຕ້ອງແລະການເຮັດວຽກທີ່ບໍ່ໄດ້ປະຕິບັດຢ່າງຖືກຕ້ອງ. ນີ້ສາມາດເຮັດໃຫ້ເກີດການບາດເຈັບສ່ວນບຸກຄົນທີ່ຮ້າຍແຮງແລະຄວາມເສຍຫາຍຕໍ່ຊັບສິນ.
- ວຽກງານ ແລະໜ້າທີ່ທັງໝົດທີ່ໄດ້ອະທິບາຍໄວ້ໃນເອກະສານສະບັບນີ້ ຈະຕ້ອງຖືກປະຕິບັດໂດຍບຸກຄະລາກອນທີ່ມີການຝຶກອົບຮົມດ້ານວິຊາການ ແລະ ມີຄຸນສົມບັດເທົ່ານັ້ນ.
- ອ່ານ ແລະເຂົ້າໃຈເອກະສານສະບັບນີ້ຢ່າງຄົບຖ້ວນ.
- ອ່ານ ແລະເຂົ້າໃຈກົດລະບຽບຄວາມປອດໄພທັງໝົດ ແລະເອກະສານຂອງຜູ້ໃຊ້ສຳລັບອຸປະກອນ ແລະອົງປະກອບຂອງລະບົບທັງໝົດ.
ການເຊື່ອມຕໍ່ແລະການສະແດງ
| 1 | TX+ |
| 2 | TX- |
| 3 | RX+ |
| 6 | RX- |
| 4,5,7 , | ບໍ່ໄດ້ໃຊ້ປົກກະຕິ; ເພື່ອຮັບປະກັນ - |
| 8 | ຄວາມສົມບູນຂອງສັນຍານ, ໄດ້ |
| se pins ຕ້ອງເປັນ Intercon- | |
| nected ແລະ, ຫຼັງຈາກຜ່ານ | |
| ຜ່ານວົງຈອນການກັ່ນຕອງ, ຕ້ອງ | |
| ຢຸດຢູ່ໃນດິນ | |
| conductor (PE). |
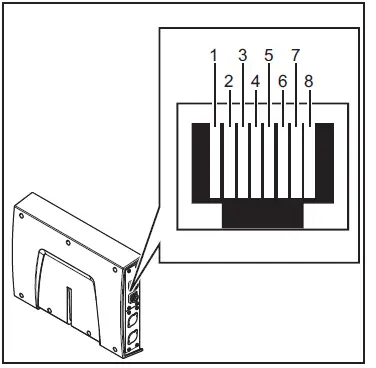
ການເຊື່ອມຕໍ່ RJ45
| (1) LED MS – ສະຖານະໂມດູນ |
| ປິດ:
ບໍ່ມີການສະຫນອງ voltage |
| ເຮັດໃຫ້ມີແສງສີຂຽວ:
ຄວບຄຸມໂດຍແມ່ບົດ |
| ກະພິບສີຂຽວ (ຄັ້ງດຽວ):
ແມ່ບົດບໍ່ໄດ້ກຳນົດຄ່າ ຫຼື master idle |
| ໄຟຂຶ້ນເປັນສີແດງ:
ຄວາມຜິດພາດທີ່ສໍາຄັນ (ລັດຍົກເວັ້ນ, ຄວາມຜິດພາດທີ່ຮ້າຍແຮງ, ... ) |
| ກະພິບເປັນສີແດງ:
ຄວາມຜິດພາດທີ່ແກ້ໄຂໄດ້ |
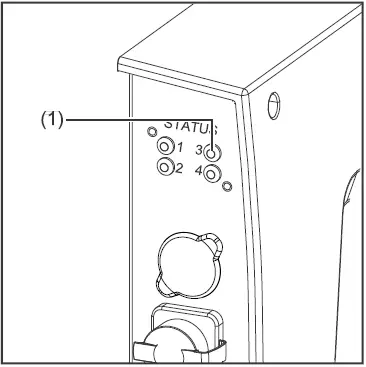
| (2) LED NS – ສະຖານະເຄືອຂ່າຍ |
| ປິດ:
ບໍ່ມີການສະຫນອງ voltage ຫຼືບໍ່ມີທີ່ຢູ່ IP |
| ເຮັດໃຫ້ມີແສງສີຂຽວ:
ອອນໄລນ໌, ຫນຶ່ງຫຼືຫຼາຍການເຊື່ອມຕໍ່ທີ່ສ້າງຕັ້ງຂຶ້ນ (CIP ປະເພດ 1 ຫຼື 3) |
| ກະພິບສີຂຽວ:
ອອນໄລນ໌, ບໍ່ມີການເຊື່ອມຕໍ່ຖືກສ້າງຕັ້ງຂຶ້ນ |
| ໄຟຂຶ້ນເປັນສີແດງ:
ທີ່ຢູ່ IP ຄູ່, ຄວາມຜິດພາດທີ່ຮ້າຍແຮງ |
| ກະພິບເປັນສີແດງ:
ເກີນເວລາສໍາລັບການເຊື່ອມຕໍ່ຫນຶ່ງຫຼືຫຼາຍ (CIP ປະເພດ 1 ຫຼື 3) |
ຄຸນສົມບັດການໂອນຂໍ້ມູນ
ເຕັກໂນໂລຊີການໂອນ
- ອີເທີເນັດ
ຂະຫນາດກາງ
- ເມື່ອເລືອກສາຍໄຟ ແລະປລັກສຽບ, ຄຳແນະນຳ ODVA ສຳລັບການວາງແຜນ ແລະການຕິດຕັ້ງລະບົບ EtherNet/IP ຕ້ອງຖືກປະຕິບັດຕາມ. ການທົດສອບ EMC ໄດ້ດໍາເນີນໂດຍຜູ້ຜະລິດທີ່ມີສາຍ IE-C5ES8VG0030M40M40-F.
ຄວາມໄວລະບົບສາຍສົ່ງ
- 10 Mbit/s ຫຼື 100 Mbit/s
ການເຊື່ອມຕໍ່ລົດເມ
- RJ-45 Ethernet / M12
ພາລາມິເຕີການຕັ້ງຄ່າ
- ໃນບາງລະບົບການຄວບຄຸມຫຸ່ນຍົນ, ມັນອາດຈະຈໍາເປັນຕ້ອງລະບຸຕົວກໍານົດການກໍານົດທີ່ອະທິບາຍຢູ່ທີ່ນີ້ເພື່ອໃຫ້ໂມດູນລົດເມສາມາດສື່ສານກັບຫຸ່ນຍົນ.
| ພາລາມິເຕີ | ມູນຄ່າ | ລາຍລະອຽດ |
| ID ຜູ້ຂາຍ | 0534hex (1332dec) | Fronius International GmbH |
| ປະເພດອຸປະກອນ | 000Chex (12 ທັນວາ) | ອະແດບເຕີການສື່ສານ |
| ລະຫັດຜະລິດຕະພັນ | 0320hex (800dec) | Fronius FB Pro Ethernet/IP-2-Port |
ຊື່ຜະລິດຕະພັນ Fronius-FB-Pro-EtherNetIP(TM)
|
ປະເພດຮູບພາບ |
ປະເພດຕົວຢ່າງ |
ຊື່ຕົວຢ່າງ |
ຕົວຢ່າງ ລາຍລະອຽດ |
ໝາຍເລກຕົວຢ່າງ |
ຂະໜາດ [Byt e] |
| ຮູບພາບມາດຕະຖານ | ຕົວຢ່າງຜະລິດຕະພັນ | ມາດຕະຖານການປ້ອນຂໍ້ມູນ | ຂໍ້ມູນຈາກແຫຼ່ງພະລັງງານໄປຫາຫຸ່ນຍົນ | 100 | 40 |
|
ປະເພດຮູບພາບ |
ປະເພດຕົວຢ່າງ |
ຊື່ຕົວຢ່າງ |
ຕົວຢ່າງ ລາຍລະອຽດ |
ໝາຍເລກຕົວຢ່າງ |
ຂະໜາດ [Byt e] |
| ຕົວຢ່າງສະຫຼຸບ | ມາດຕະຖານຂໍ້ມູນຜົນຜະລິດ | ຂໍ້ມູນຈາກຫຸ່ນຍົນໄປຫາແຫຼ່ງພະລັງງານ | 150 | 40 | |
| ຮູບພາບເສດຖະກິດ | ຕົວຢ່າງຜະລິດຕະພັນ | ມາດຕະຖານການປ້ອນຂໍ້ມູນ | ຂໍ້ມູນຈາກແຫຼ່ງພະລັງງານໄປຫາຫຸ່ນຍົນ | 101 | 16 |
| ຕົວຢ່າງສະຫຼຸບ | ມາດຕະຖານຂໍ້ມູນຜົນຜະລິດ | ຂໍ້ມູນຈາກຫຸ່ນຍົນໄປຫາແຫຼ່ງພະລັງງານ | 151 | 16 |
ການຕັ້ງຄ່າທີ່ຢູ່ IP ຂອງໂມດູນລົດເມ
ການຕັ້ງຄ່າທີ່ຢູ່ IP ຂອງໂມດູນລົດເມ ທ່ານສາມາດກໍານົດທີ່ຢູ່ IP ຂອງໂມດູນລົດເມດັ່ງຕໍ່ໄປນີ້:
- ການນໍາໃຊ້ສະວິດ DIP ໃນການໂຕ້ຕອບພາຍໃນຂອບເຂດກໍານົດໂດຍ 192.168.0.xx (xx = ການຕັ້ງຄ່າສະຫຼັບ DIP = 1 ເຖິງ 63)
- ຕໍາແຫນ່ງທັງຫມົດແມ່ນຖືກກໍານົດເປັນຕໍາແຫນ່ງ OFF ຢູ່ໂຮງງານ. ໃນກໍລະນີນີ້, ທີ່ຢູ່ IP ຕ້ອງໄດ້ຮັບການຕັ້ງຢູ່ໃນ webສະຖານທີ່ຂອງເຄື່ອງເຊື່ອມ
- ສຸດ webສະຖານທີ່ຂອງເຄື່ອງເຊື່ອມ (ຖ້າທຸກຕໍາແຫນ່ງຂອງສະຫຼັບ DIP ຖືກຕັ້ງເປັນຕໍາແຫນ່ງ OFF)
ທີ່ຢູ່ IP ຖືກກໍານົດໂດຍໃຊ້ DIP switch positions 1 ຫາ 6. ການຕັ້ງຄ່າແມ່ນດໍາເນີນໃນຮູບແບບຖານສອງ. ອັນນີ້ສົ່ງຜົນໃຫ້ມີຂອບເຂດການຕັ້ງຄ່າ 1 ຫາ 63 ໃນຮູບແບບທົດສະນິຍົມ.
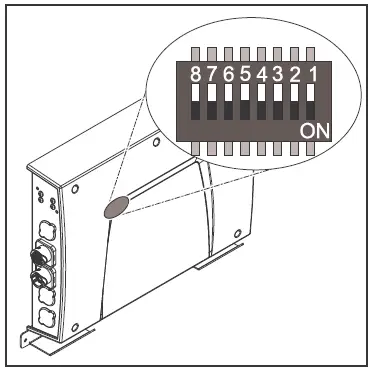
| Example ສໍາລັບ ການຕັ້ງຄ່າ ໄດ້ IP ທີ່ຢູ່ ຂອງໂມດູນລົດເມໂດຍໃຊ້ DIP switch in ການໂຕ້ຕອບ: | ||||||||
| ຈຸ່ມ | ||||||||
| 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | ທີ່ຢູ່ IP |
| – | – | ປິດ | ປິດ | ປິດ | ປິດ | ປິດ | ON | 1 |
| – | – | ປິດ | ປິດ | ປິດ | ປິດ | ON | ປິດ | 2 |
| – | – | ປິດ | ປິດ | ປິດ | ປິດ | ON | ON | 3 |
| – | – | ON | ON | ON | ON | ON | ປິດ | 62 |
| – | – | ON | ON | ON | ON | ON | ON | 63 |
ຄໍາແນະນໍາສໍາລັບການກໍານົດທີ່ຢູ່ IP ຢູ່ໃນ webສະຖານທີ່ຂອງເຄື່ອງເຊື່ອມ:
ບັນທຶກທີ່ຢູ່ IP ຂອງເຄື່ອງເຊື່ອມທີ່ໃຊ້:
- ໃນແຜງຄວບຄຸມເຄື່ອງເຊື່ອມ, ເລືອກ "ຄ່າເລີ່ມຕົ້ນ"
- ໃນແຜງຄວບຄຸມເຄື່ອງເຊື່ອມ, ເລືອກ "ລະບົບ"
- ໃນແຜງຄວບຄຸມເຄື່ອງເຊື່ອມ, ເລືອກ "ຂໍ້ມູນ"
- ບັນທຶກທີ່ຢູ່ IP ທີ່ສະແດງ (ຕົວຢ່າງample: 10.5.72.13)
ເຂົ້າເຖິງ webສະຖານທີ່ຂອງເຄື່ອງເຊື່ອມໃນຕົວທ່ອງເວັບອິນເຕີເນັດ:
- ເຊື່ອມຕໍ່ຄອມພິວເຕີກັບເຄືອຂ່າຍຂອງເຄື່ອງເຊື່ອມ
- ໃສ່ທີ່ຢູ່ IP ຂອງເຄື່ອງເຊື່ອມໃນແຖບຄົ້ນຫາຂອງຕົວທ່ອງເວັບອິນເຕີເນັດແລະຢືນຢັນ
- ໃສ່ຊື່ຜູ້ໃຊ້ມາດຕະຖານ (admin) ແລະລະຫັດຜ່ານ (admin)
- ໄດ້ webສະຖານທີ່ຂອງແຫຼ່ງພະລັງງານໄດ້ຖືກສະແດງ
ຕັ້ງທີ່ຢູ່ IP ຂອງໂມດູນລົດເມ:
- ໃນເຄື່ອງເຊື່ອມໄຟຟ້າ, ເລືອກແຖບ “RI FB PRO/i”
- ໃສ່ທີ່ຢູ່ IP ທີ່ຕ້ອງການສໍາລັບການໂຕ້ຕອບພາຍໃຕ້ "ການຕັ້ງຄ່າໂມດູນ". ຕົວຢ່າງampເລ: 192.168.0.12
- ເລືອກ "ຕັ້ງຄ່າການຕັ້ງຄ່າ"
- ເລືອກ "ຣີສະຕາດໂມດູນ"
- ທີ່ຢູ່ IP ທີ່ກໍານົດໄວ້ແມ່ນຖືກນໍາໃຊ້
ສັນຍານ input ແລະ output
ປະເພດຂໍ້ມູນ
ປະເພດຂໍ້ມູນຕໍ່ໄປນີ້ຖືກໃຊ້:
- UINT16 (ຈຳນວນເຕັມທີ່ບໍ່ໄດ້ເຊັນ)
- ຈໍານວນທັງຫມົດໃນລະຫວ່າງ 0 ຫາ 65535
- SINT16 (ຈຳນວນເຕັມທີ່ລົງນາມ)
- ຈໍານວນທັງຫມົດຕັ້ງແຕ່ -32768 ຫາ 32767
ການປ່ຽນແປງ examples:
- ສໍາລັບຄ່າບວກ (SINT16) ເຊັ່ນ: ຄວາມໄວສາຍທີ່ຕ້ອງການ x factor 12.3 m/min x 100 = 1230dec = 04CEhex
- ສໍາລັບຄ່າລົບ (SINT16) ເຊັ່ນ: ການແກ້ໄຂ arc x factor -6.4 x 10 = -64dec = FFC0hex
ຄວາມພ້ອມຂອງສັນຍານເຂົ້າ
ສັນຍານຂາເຂົ້າທີ່ລະບຸໄວ້ຂ້າງລຸ່ມນີ້ແມ່ນມີໃຫ້ຈາກເຟີມແວ V2.0.0 ຂອງ RI FB PRO/i ເປັນຕົ້ນໄປ.
ສັນຍານເຂົ້າ (ຈາກຫຸ່ນຍົນໄປຫາແຫຼ່ງພະລັງງານ)
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
0 |
0 |
0 | 0 | ການເຊື່ອມໂລຫະເລີ່ມຕົ້ນ | ເພີ່ມຂຶ້ນ |
ü |
ü |
||
| 1 | 1 | ຫຸ່ນຍົນພ້ອມ | ສູງ | ||||||
| 2 | 2 | ຮູບແບບການເຮັດວຽກ Bit 0 | ສູງ |
ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງ ສໍາລັບ ເຮັດວຽກ ໂໝດ ໃນຫນ້າ 35 |
|||||
| 3 | 3 | ຮູບແບບການເຮັດວຽກ Bit 1 | ສູງ | ||||||
| 4 | 4 | ຮູບແບບການເຮັດວຽກ Bit 2 | ສູງ | ||||||
| 5 | 5 | ຮູບແບບການເຮັດວຽກ Bit 3 | ສູງ | ||||||
| 6 | 6 | ຮູບແບບການເຮັດວຽກ Bit 4 | ສູງ | ||||||
| 7 | 7 | — | |||||||
|
1 |
0 | 8 | ເປີດອາຍແກັສ | ເພີ່ມຂຶ້ນ | |||||
| 1 | 9 | ສາຍຕໍ່ | ເພີ່ມຂຶ້ນ | ||||||
| 2 | 10 | ສາຍກັບຄືນໄປບ່ອນ | ເພີ່ມຂຶ້ນ | ||||||
| 3 | 11 | ຄວາມຜິດພາດອອກ | ເພີ່ມຂຶ້ນ | ||||||
| 4 | 12 | ການຮັບຮູ້ການສໍາພັດ | ສູງ | ||||||
| 5 | 13 | ໄຟໄໝ້ອອກ | ເພີ່ມຂຶ້ນ | ||||||
| 6 | 14 | ການປະມວນຜົນການເລືອກ Bit 0 | ສູງ | ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງຂະບວນການ li- ບໍ່ເລືອກn ໃນຫນ້າ 36 | |||||
|
7 |
15 |
ການປະມວນຜົນການເລືອກ Bit 1 |
ສູງ |
||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
1 |
2 |
0 | 16 | ການຈຳລອງການເຊື່ອມ | ສູງ |
ü |
ü |
||
|
1 |
17 |
ຂະບວນການເຊື່ອມໂລຫະ MIG/MAG: 1)
ຊິ້ງກຳມະຈອນເປີດຢູ່ |
ສູງ |
||||||
| ຂະບວນການເຊື່ອມ WIG: 2)
TAC ເປີດ |
ສູງ |
||||||||
|
2 |
18 |
ຂະບວນການເຊື່ອມ WIG: 2)
ການສ້າງຝາ |
ສູງ |
||||||
| 3 | 19 | — | |||||||
| 4 | 20 | — | |||||||
| 5 | 21 | ຄູ່ມືການເສີມ | ສູງ | ||||||
| 6 | 22 | ສາຍເບກເປີດ | ສູງ | ||||||
| 7 | 23 | Torchbody Xchange | ສູງ | ||||||
|
3 |
0 | 24 | — | ||||||
| 1 | 25 | ສອນໂດ | ສູງ | ||||||
| 2 | 26 | — | |||||||
| 3 | 27 | — | |||||||
| 4 | 28 | — | |||||||
| 5 | 29 | ສາຍຕັ້ງແຕ່ເລີ່ມຕົ້ນ | ເພີ່ມຂຶ້ນ | ||||||
| 6 | 30 | ການແຕກແຍກຄວາມຮູ້ສຶກ | ເພີ່ມຂຶ້ນ | ||||||
| 7 | 31 | — | |||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
2 |
4 |
0 | 32 | ໂໝດ TWIN Bit 0 | ສູງ | ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງສຳລັບ TWIN ໂໝດ ໃນຫນ້າ 36 |
ü |
ü |
|
|
1 |
33 |
ໂໝດ TWIN Bit 1 |
ສູງ |
||||||
| 2 | 34 | — | |||||||
| 3 | 35 | — | |||||||
| 4 | 36 | — | |||||||
|
5 |
37 |
ຮູບແບບເອກະສານ |
ສູງ |
ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງສຳລັບ Docu- ຮູບແບບການກ່າວເຖິງ ໃນຫນ້າ 36 | |||||
| 6 | 38 | — | |||||||
| 7 | 39 | — | |||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | ປິດການໃຊ້ງານການແກ້ໄຂທີ່ຄວບຄຸມໂດຍຂະບວນການ | ສູງ | ||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
3 |
6 |
0 | 48 | — |
ü |
ü |
|||
| 1 | 49 | — | |||||||
| 2 | 50 | — | |||||||
| 3 | 51 | — | |||||||
| 4 | 52 | — | |||||||
| 5 | 53 | — | |||||||
| 6 | 54 | — | |||||||
| 7 | 55 | — | |||||||
|
7 |
0 | 56 | ExtInput1 => OPT_Output 1 | ສູງ | |||||
| 1 | 57 | ExtInput2 => OPT_Output 2 | ສູງ | ||||||
| 2 | 58 | ExtInput3 => OPT_Output 3 | ສູງ | ||||||
| 3 | 59 | ExtInput4 => OPT_Output 4 | ສູງ | ||||||
| 4 | 60 | ExtInput5 => OPT_Output 5 | ສູງ | ||||||
| 5 | 61 | ExtInput6 => OPT_Output 6 | ສູງ | ||||||
| 6 | 62 | ExtInput7 => OPT_Output 7 | ສູງ | ||||||
| 7 | 63 | ExtInput8 => OPT_Output 8 | ສູງ | ||||||
| 4 | 8-
9 |
0–7 | 64–79 | ລັກສະນະການເຊື່ອມໂລຫະ- / ຈໍານວນວຽກເຮັດງານທໍາ | UINT16 | 0 ຫາ 1000 | 1 | ü | ü |
|
5 |
10 – 11 |
0-7 |
80-95 |
ຂະບວນການເຊື່ອມໂລຫະ MIG/MAG: 1)
ສາຍຄົງທີ່:
ຄ່າຄຳສັ່ງຄວາມໄວຂອງສາຍອາຫານ |
SINT16 |
-327,68 ເຖິງ 327,67 [ນ/ນ] |
100 |
ü |
ü |
| ຂະບວນການເຊື່ອມ WIG: 2)
Main- / Hotwire ຄ່າຄໍາສັ່ງປະຈຸບັນ |
UINT16 |
0 ເຖິງ 6553,5 [A] |
10 |
||||||
| ສໍາລັບຮູບແບບວຽກ:
ການແກ້ໄຂພະລັງງານ |
SINT16 |
-20,00 ເຖິງ
20,00 [%] |
100
|
||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
6 |
12 – 13 |
0-7 |
96-111 |
ຂະບວນການເຊື່ອມໂລຫະ MIG/MAG: 1)
ການແກ້ໄຂ Arclength |
SINT16 |
-10,0 ເຖິງ
10,0 [Schritte] |
10 |
ü |
ü |
| ຂະບວນການເຊື່ອມ
MIG/MAG Standard-Manuel:
ການເຊື່ອມໂລຫະ voltage |
UINT16 |
0,0 ເຖິງ
6553,5 [V] |
10 |
||||||
| ຂະບວນການເຊື່ອມ WIG: 2)
ຄ່າຄຳສັ່ງຄວາມໄວຂອງສາຍອາຫານ |
SINT16 |
-327,68 ເຖິງ 327,67 [ນ/ນ] |
100 |
||||||
| ສໍາລັບຮູບແບບວຽກ:
ການແກ້ໄຂ Arclength |
SINT16 |
-10,0 ເຖິງ
10,0 [Schritte] |
10 |
||||||
| ຂະບວນການເຊື່ອມສາຍຄົງທີ່:
ສາຍດ່ວນ |
UINT16 |
0,0 ເຖິງ
6553,5 [A] |
10 |
||||||
|
7 |
14 – 15 |
0-7 |
112-127 |
ຂະບວນການເຊື່ອມໂລຫະ MIG/MAG: 1)
Pulse-/dynamic ການແກ້ໄຂ |
SINT16 |
-10,0 ເຖິງ
10,0 [ຂັ້ນຕອນ] |
10 |
ü |
ü |
| ຂະບວນການເຊື່ອມ
MIG/MAG Standard-Manuel:
ໄດນາມິກ |
UINT16 |
0,0 ເຖິງ
10,0 [ຂັ້ນຕອນ] |
10 |
||||||
| ຂະບວນການເຊື່ອມ WIG: 2)
ການແກ້ໄຂສາຍ |
SINT16 |
-10,0 ເຖິງ
10,0 [ຂັ້ນຕອນ] |
10 |
||||||
|
8 |
16 – 17 |
0-7 |
128-143 |
ຂະບວນການເຊື່ອມໂລຫະ MIG/MAG: 1)
ການແກ້ໄຂການຖອດສາຍ |
UINT16 |
0,0 ເຖິງ
10,0 [ຂັ້ນຕອນ] |
10 |
ü |
|
| ຂະບວນການເຊື່ອມ WIG: 2)
ປາຍຖອດສາຍ |
UINT16 |
ປິດ, 1 ເຖິງ
50 [ມມ] |
1 |
||||||
|
9 |
18
– 19 |
0-7 |
144-159 |
ຄວາມໄວການເຊື່ອມ |
UINT16 |
0,0 ເຖິງ
1000,0 [ຊມ/ນາທີ] |
10 |
ü |
|
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ | ຮູບພາບຂະບວນການ | ||||
|
ພີ່ນ້ອງ |
Absolu-te | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
10 |
20 – 21 |
0-7 |
160-175 |
ການແກ້ໄຂຄວບຄຸມຂະບວນການ |
ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງ ສຳ ລັບ ຂະບວນການ ຄວບຄຸມ ການແກ້ໄຂ ໃນຫນ້າ 36 |
ü |
|||
|
11 |
22
– 23 |
0-7 |
176-191 |
ຂະບວນການເຊື່ອມ WIG: 2)
ເລີ່ມຕົ້ນການຈັດຕໍາແຫນ່ງສາຍ |
ü |
||||
|
12 |
24
– 25 |
0-7 |
192-207 |
— |
ü |
||||
|
13 |
26
– 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
– 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
– 31 |
0-7 |
240-255 |
ຄວາມຍາວຂອງສາຍຕໍ່ / ຫລັງ |
UINT16 |
ປິດ / 1 ເຖິງ 65535 [ມມ] |
1 |
ü |
|
|
16 |
32
– 33 |
0-7 |
256-271 |
ການກວດສອບຄວາມຮູ້ສຶກຂອບສາຍ |
UINT16 |
ປິດ / 0,5
ເຖິງ 20,0 [ມມ] |
10 |
ü |
|
|
17 |
34
– 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
– 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
– 39 |
0-7 |
304-319 |
ໝາຍເລກ seam |
UINT16 |
0 ເຖິງ
65535 |
1 |
ü |
|
- MIG/MAG Puls-Synergic, MIG/MAG Standard-Synergic, MIG/MAG Stan- dard-Manuel, MIG/MAG PMC, MIG/MAG, LSC
- WIG ສາຍເຢັນ, WIG hotwire
ຊ່ວງມູນຄ່າສໍາລັບຮູບແບບການເຮັດວຽກ
| ບິດ 4 | ບິດ 3 | ບິດ 2 | ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | 0 | 0 | 0 | ການເລືອກພາລາມິເຕີພາຍໃນ |
| 0 | 0 | 0 | 0 | 1 | ລັກສະນະພິເສດຂອງໂໝດ 2 ຂັ້ນຕອນ |
| 0 | 0 | 0 | 1 | 0 | ໂໝດວຽກ |
| ບິດ 4 | ບິດ 3 | ບິດ 2 | ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 1 | 0 | 0 | 0 | ລັກສະນະຮູບແບບ 2 ຂັ້ນຕອນ |
| 0 | 1 | 0 | 0 | 1 | ຄູ່ມືມາດຕະຖານ 2 ຂັ້ນຕອນ MIG/MAG |
| 1 | 0 | 0 | 0 | 0 | ແບບບໍ່ເຮັດວຽກ |
| 1 | 0 | 0 | 0 | 1 | ຢຸດປັ໊ມ coolant |
| 1 | 1 | 0 | 0 | 1 | ການວັດແທກ R/L |
ຊ່ວງຄ່າສໍາລັບຮູບແບບການເຮັດວຽກ
ຊ່ວງມູນຄ່າສໍາລັບຮູບແບບເອກະສານ
| ບິດ 0 | ລາຍລະອຽດ |
| 0 | ຈໍານວນ seam ຂອງເຄື່ອງເຊື່ອມ (ພາຍໃນ) |
| 1 | ຈໍານວນ seam ຂອງຫຸ່ນຍົນ (Word 19) |
ຊ່ວງຄ່າຂອງຮູບແບບເອກະສານ
ຊ່ວງຄ່າສໍາລັບການແກ້ໄຂການຄວບຄຸມທີ່ນໍາພາຂະບວນການ
|
ຂະບວນການ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ການຕັ້ງຄ່າຊ່ວງຄ່າ ຊ່ວງ |
ໜ່ວຍ |
ປັດໄຈ |
|
PMC |
ຕົວຍຶດຄວາມຍາວຂອງອາກ |
SINT16 |
-327.8 ເຖິງ +327.7
0.0 ເຖິງ +5.0 |
ແຮງດັນ |
10 |
ຊ່ວງຄ່າຂອງຮູບແບບເອກະສານ
ຊ່ວງຄ່າສໍາລັບການແກ້ໄຂການຄວບຄຸມທີ່ນໍາພາຂະບວນການ
|
ຂະບວນການ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ການຕັ້ງຄ່າຊ່ວງຄ່າ ຊ່ວງ |
ໜ່ວຍ |
ປັດໄຈ |
|
PMC |
ຕົວຍຶດຄວາມຍາວຂອງອາກ |
SINT16 |
-327.8 ເຖິງ +327.7
0.0 ເຖິງ +5.0 |
ແຮງດັນ |
10 |
ຊ່ວງຄ່າສໍາລັບການແກ້ໄຂຂຶ້ນກັບຂະບວນການ
ຊ່ວງມູນຄ່າການເລືອກເສັ້ນຂະບວນການ
| ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | ເສັ້ນຂະບວນການ 1 (ຄ່າເລີ່ມຕົ້ນ) |
| 0 | 1 | ເສັ້ນຂະບວນການ 2 |
| 1 | 0 | ເສັ້ນຂະບວນການ 3 |
| 1 | 1 | ສະຫງວນໄວ້ |
ໄລຍະມູນຄ່າສໍາລັບການເລືອກເສັ້ນຂະບວນການ
ຊ່ວງຄ່າສຳລັບໂໝດ TWIN
| ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | TWIN ໂໝດດຽວ |
| 0 | 1 | TWIN ຮູບແບບການນໍາພາ |
| 1 | 0 | ໂໝດ TWIN Trail |
| 1 | 1 | ສະຫງວນໄວ້ |
ຊ່ວງຄ່າສຳລັບໂໝດ TWIN
ຄວາມພ້ອມຂອງສັນຍານຜົນຜະລິດ
ສັນຍານຜົນຜະລິດທີ່ລະບຸໄວ້ຂ້າງລຸ່ມນີ້ແມ່ນມີໃຫ້ຈາກເຟີມແວ V2.0.0 ຂອງ RI FB PRO/i ເປັນຕົ້ນໄປ.
ສັນຍານອອກ (ຈາກແຫຼ່ງພະລັງງານໄປຫາຫຸ່ນຍົນ)
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ |
ຮູບພາບຂະບວນການ | ||||
| ພີ່ນ້ອງ | ຢ່າງແທ້ຈິງ | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
0 |
0 |
0 | 0 | ແຫຼ່ງພະລັງຫົວໃຈ | ສູງ/ຕໍ່າ | 1 Hz |
ü |
ü |
|
| 1 | 1 | ແຫຼ່ງພະລັງງານກຽມພ້ອມ | ສູງ | ||||||
| 2 | 2 | ຄຳເຕືອນ | ສູງ | ||||||
| 3 | 3 | ຂະບວນການເຮັດວຽກ | ສູງ | ||||||
| 4 | 4 | ກະແສກະແສ | ສູງ | ||||||
| 5 | 5 | Arc ຫມັ້ນຄົງ- / ສັນຍານສໍາພັດ | ສູງ | ||||||
| 6 | 6 | ສັນຍານປັດຈຸບັນຕົ້ນຕໍ | ສູງ | ||||||
| 7 | 7 | ແຕະສັນຍານ | ສູງ | ||||||
|
1 |
0 |
8 |
ກ່ອງໂຕ້ຕອບມີການເຄື່ອນໄຫວ |
ສູງ |
0 = collision- on or cable break | ||||
| 1 | 9 | ການປ່ອຍຫຸ່ນຍົນ | ສູງ | ||||||
| 2 | 10 | ແຜ່ນໄມ້ຕິດສາຍ | ສູງ | ||||||
| 3 | 11 | — | |||||||
| 4 | 12 | ເຄັດລັບການຕິດຕໍ່ຂອງວົງຈອນສັ້ນ | ສູງ | ||||||
| 5 | 13 | ການເລືອກພາລາມິເຕີ - ຕະຫຼອດໄປ | ສູງ | ||||||
| 6 | 14 | ຕົວເລກລັກສະນະທີ່ຖືກຕ້ອງ | ສູງ | ||||||
| 7 | 15 | ຮ່າງກາຍໄຟຖືກຈັບ | ສູງ | ||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ |
ຮູບພາບຂະບວນການ | ||||
| ພີ່ນ້ອງ | ຢ່າງແທ້ຈິງ | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
1 |
2 |
0 | 16 | ຄ່າຄໍາສັ່ງຢູ່ນອກຂອບເຂດ | ສູງ |
ü |
ü |
||
| 1 | 17 | ການແກ້ໄຂນອກຂອບເຂດ | ສູງ | ||||||
| 2 | 18 | — | |||||||
| 3 | 19 | ສັນຍານຈໍາກັດ | ສູງ | ||||||
| 4 | 20 | — | |||||||
| 5 | 21 | — | |||||||
| 6 | 22 | ສະຖານະການສະຫນອງຕົ້ນຕໍ | ຕໍ່າ | ||||||
| 7 | 23 | — | |||||||
|
3 |
0 | 24 | ສະຖານະເຊັນເຊີ 1 | ສູງ |
ເບິ່ງຕາຕະລາງ ມອບໝາຍ- ຄວາມຄິດເຫັນຂອງ Sensor Sta- ໃຊ້ 1–4 ໃນຫນ້າ 40 |
||||
| 1 | 25 | ສະຖານະເຊັນເຊີ 2 | ສູງ | ||||||
| 2 | 26 | ສະຖານະເຊັນເຊີ 3 | ສູງ | ||||||
| 3 | 27 | ສະຖານະເຊັນເຊີ 4 | ສູງ | ||||||
| 4 | 28 | — | |||||||
| 5 | 29 | — | |||||||
| 6 | 30 | — | |||||||
| 7 | 31 | — | |||||||
|
2 |
4 |
0 | 32 | — |
ü |
ü |
|||
| 1 | 33 | — | |||||||
| 2 | 34 | — | |||||||
| 3 | 35 | ສະຖານະຄວາມປອດໄພ Bit 0 | ສູງ | ເບິ່ງຕາຕະລາງ ຄ່າແລ່ນ- ge ສະຖານະພາບຄວາມປອດໄພ ໃນຫນ້າ 41 | |||||
| 4 | 36 | ສະຖານະຄວາມປອດໄພ Bit 1 | ສູງ | ||||||
| 5 | 37 | — | |||||||
| 6 | 38 | ແຈ້ງການ | ສູງ | ||||||
| 7 | 39 | ລະບົບບໍ່ພ້ອມ | ສູງ | ||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | — | |||||||
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ |
ຮູບພາບຂະບວນການ | ||||
| ພີ່ນ້ອງ | ຢ່າງແທ້ຈິງ | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
3 |
6 |
0 | 48 | ຂະບວນການບິດ 0 | ສູງ |
ເບິ່ງຕາຕະລາງ ມູນຄ່າ ຊ່ວງ ສໍາລັບ ຂະບວນການ ບິດ ໃນຫນ້າ 41 |
ü |
ü |
|
| 1 | 49 | ຂະບວນການບິດ 1 | ສູງ | ||||||
| 2 | 50 | ຂະບວນການບິດ 2 | ສູງ | ||||||
| 3 | 51 | ຂະບວນການບິດ 3 | ສູງ | ||||||
| 4 | 52 | ຂະບວນການບິດ 4 | ສູງ | ||||||
| 5 | 53 | — | |||||||
| 6 | 54 | ແຕະສັນຍານຫົວກ໊າຊ | ສູງ | ||||||
| 7 | 55 | ການຊິ້ງຂໍ້ມູນ TWIN ເຮັດວຽກຢູ່ | ສູງ | ||||||
|
7 |
0 | 56 | ExtOutput1 <= OPT_In- put1 | ສູງ | |||||
| 1 | 57 | ExtOutput2 <= OPT_In- put2 | ສູງ | ||||||
| 2 | 58 | ExtOutput3 <= OPT_In- put3 | ສູງ | ||||||
| 3 | 59 | ExtOutput4 <= OPT_In- put4 | ສູງ | ||||||
| 4 | 60 | ExtOutput5 <= OPT_In- put5 | ສູງ | ||||||
| 5 | 61 | ExtOutput6 <= OPT_In- put6 | ສູງ | ||||||
| 6 | 62 | ExtOutput7 <= OPT_In- put7 | ສູງ | ||||||
| 7 | 63 | ExtOutput8 <= OPT_In- put8 | ສູງ | ||||||
| 4 | 8-
9 |
0-7 | 64-79 | ການເຊື່ອມໂລຫະ voltage | UINT16 | 0.0 ເຖິງ
655.35 [V] |
100 | ü | ü |
|
5 |
10
– 11 |
0-7 |
80-95 |
ກະແສເຊື່ອມ |
UINT16 |
0.0 ຫາ 6553.5 [A] |
10 |
ü |
ü |
|
6 |
12
– 13 |
0-7 |
96-111 |
ຄວາມໄວອາຫານສາຍ |
SINT16 |
-327.68 ເຖິງ
327.67 [ມ/ນ] |
100 |
ü |
ü |
|
7 |
14
– 15 |
0-7 |
112-127 |
ມູນຄ່າທີ່ແທ້ຈິງທີ່ແທ້ຈິງສໍາລັບການຕິດຕາມ seam |
UINT16 |
0 ເຖິງ
6.5535 |
10000 |
ü |
ü |
|
8 |
16
– 17 |
0-7 |
128-143 |
ໝາຍເລກຜິດພາດ |
UINT16 |
0 ເຖິງ
65535 |
1 |
ü |
|
|
9 |
18
– 19 |
0-7 |
144-159 |
ໝາຍເລກເຕືອນ |
UINT16 |
0 ເຖິງ
65535 |
1 |
ü |
|
|
ທີ່ຢູ່ |
ສັນຍານ |
ປະເພດການເຄື່ອນໄຫວ/ຂໍ້ມູນ |
ຊ່ວງ |
ປັດໄຈ |
ຮູບພາບຂະບວນການ | ||||
| ພີ່ນ້ອງ | ຢ່າງແທ້ຈິງ | ມາດຕະຖານ | ເສດຖະກິດ | ||||||
| ຄໍາ | ບໍລິສັດ BYTE | ບິດ |
ບິດ |
||||||
|
10 |
20
– 21 |
0-7 |
160-175 |
ມໍເຕີປະຈຸບັນ M1 |
SINT16 |
-327.68 ເຖິງ
327.67 [A] |
100 |
ü |
|
|
11 |
22
– 23 |
0-7 |
176-191 |
ມໍເຕີປະຈຸບັນ M2 |
SINT16 |
-327.68 ເຖິງ
327.67 [A] |
100 |
ü |
|
|
12 |
24
– 25 |
0-7 |
192-207 |
ມໍເຕີປະຈຸບັນ M3 |
SINT16 |
-327.68 ເຖິງ
327.67 [A] |
100 |
ü |
|
|
13 |
26
– 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
– 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
– 31 |
0-7 |
240-255 |
— |
ü |
||||
|
16 |
32
– 33 |
0-7 |
256-271 |
ຕໍາແຫນ່ງສາຍ |
SINT16 |
-327.68 ເຖິງ
327.67 [ມມ] |
100 |
ü |
|
|
17 |
34
– 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
– 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
– 39 |
0-7 |
304-319 |
— |
ü |
||||
ການກຳນົດສະຖານະເຊັນເຊີ 1–4
| ສັນຍານ | ລາຍລະອຽດ |
| ສະຖານະເຊັນເຊີ 1 | ປາຍສາຍ OPT/i WF R (4,100,869) |
| ສະຖານະເຊັນເຊີ 2 | OPT/i WF R wire drum (4,100,879) |
| ສະຖານະເຊັນເຊີ 3 | ເຊັນເຊີວົງແຫວນ OPT/i WF R (4,100,878) |
| ສະຖານະເຊັນເຊີ 4 | ຊຸດ Wire buffer CMT TPS/I (4,001,763) |
ການກໍານົດສະຖານະການເຊັນເຊີ
ສະຖານະຄວາມປອດໄພລະດັບມູນຄ່າ
| ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | ຈອງ |
| 0 | 1 | ຖື |
| 1 | 0 | ຢຸດ |
| 1 | 1 | ບໍ່ໄດ້ຕິດຕັ້ງ / ເຮັດວຽກ |
ຊ່ວງມູນຄ່າສໍາລັບຂະບວນການບິດ
| ບິດ 4 | ບິດ 3 | ບິດ 2 | ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | 0 | 0 | 0 | ບໍ່ມີການເລືອກຕົວກໍານົດການພາຍໃນຫຼືຂະບວນການ |
| 0 | 0 | 0 | 0 | 1 | MIG/MAG ປະສານກຳມະຈອນ |
| 0 | 0 | 0 | 1 | 0 | ການປະສົມປະສານມາດຕະຖານ MIG/MAG |
| 0 | 0 | 0 | 1 | 1 | MIG/MAG PMC |
| 0 | 0 | 1 | 0 | 0 | MIG/MAG LSC |
| 0 | 0 | 1 | 0 | 1 | ຄູ່ມືມາດຕະຖານ MIG/MAG |
| 0 | 0 | 1 | 1 | 0 | ໄຟຟ້າ |
| 0 | 0 | 1 | 1 | 1 | TIG |
| 0 | 1 | 0 | 0 | 0 | CMT |
| 0 | 1 | 0 | 0 | 1 | ຄອນສະແຕນຕິນ |
| 0 | 1 | 0 | 1 | 0 | ColdWire |
| 0 | 1 | 0 | 1 | 1 | DynamicWire |
ຊ່ວງມູນຄ່າສໍາລັບຂະບວນການບິດ
ຊ່ວງຄ່າສຳລັບສະຖານະຟັງຊັນ
| ບິດ 1 | ບິດ 0 | ລາຍລະອຽດ |
| 0 | 0 | ບໍ່ເຄື່ອນໄຫວ |
| 0 | 1 | ບໍ່ເຮັດວຽກ |
| 1 | 0 | ສຳເລັດແລ້ວ |
| 1 | 1 | ຜິດພາດ |
ຊ່ວງຄ່າສຳລັບສະຖານະຟັງຊັນ

- spareparts.fronius.com
- At www.fronius.com/contact ເຈົ້າຈະພົບເຫັນລາຍລະອຽດການຕິດຕໍ່ຂອງບໍລິສັດຍ່ອຍ Fronius ແລະຄູ່ຮ່ວມງານການຂາຍ ແລະການບໍລິການ. ຄໍາຖາມທີ່ຖາມເລື້ອຍໆ.
ຂ້ອຍຈະແກ້ໄຂບັນຫາຕົວຊີ້ບອກສະຖານະ LED ໄດ້ແນວໃດ?
ຖ້າ LED MS ຖືກໄຟເປັນສີແດງ, ມັນສະແດງເຖິງຄວາມຜິດພາດຕົ້ນຕໍ. ຖ້າມັນກະພິບສີແດງ, ມັນສະແດງເຖິງຄວາມຜິດພາດທີ່ສາມາດແກ້ໄຂໄດ້. ສໍາລັບ LED NS, ໄຟສີແດງສາມາດຊີ້ບອກທີ່ຢູ່ IP ສອງເທົ່າຫຼືຄວາມຜິດພາດເຄືອຂ່າຍທີ່ຮ້າຍແຮງ.
ຕົວກໍານົດການກໍານົດຄ່າເລີ່ມຕົ້ນສໍາລັບໂມດູນລົດເມແມ່ນຫຍັງ?
ພາລາມິເຕີການຕັ້ງຄ່າເລີ່ມຕົ້ນປະກອບມີ ID ຜູ້ຂາຍ: 0534hex, ປະເພດອຸປະກອນ: ອະແດັບເຕີການສື່ສານ, ລະຫັດສິນຄ້າ: 0320hex, ຊື່ຜະລິດຕະພັນ: Fronius FB Pro Ethernet/IP-2-Port.
ເອກະສານ / ຊັບພະຍາກອນ
 |
Fronius RI MOD Compact Com ໂມດູນ [pdf] ຄູ່ມືການສອນ RI MOD Compact Com Module, RI MOD, Compact Com Module, ໂມດູນ com, ໂມດູນ |



