D3エンジニアリング 2ASVZ-02 DesignCore mmWaveレーダーセンサー

製品情報
仕様
- モデル: RS-6843AOP
製品使用説明書
導入
このドキュメントでは、D3 Engineering Design Core® RS-1843AOP、RS-6843AOP、および RS-6843AOPA シングルボード mm 波センサー モジュールの使用方法について説明します。この統合ガイドで取り上げられているセンサーは、フォーム ファクターとインターフェイスが同一です。さまざまなモデルの概要を次に示します。詳細については、特定のデバイスのデータ シートを参照してください。
表1. RS-x843AOPモデル
| モデル | デバイス | 周波数帯域 | アンテナパターン | 資格(RFIC) |
| RS-1843AOP | AWR1843AOP | 77GHz帯 | 方位角優先 | ECQ-100 試験 |
| RS-6843AOP | IWR6843AOP | 60GHz帯 | バランスのとれた Az/El | 該当なし |
| RS-6843AOPA | AWR6843AOP | 60GHz帯 | バランスのとれた Az/El | ECQ-100 試験 |
機械的統合
熱と電気に関する考慮事項
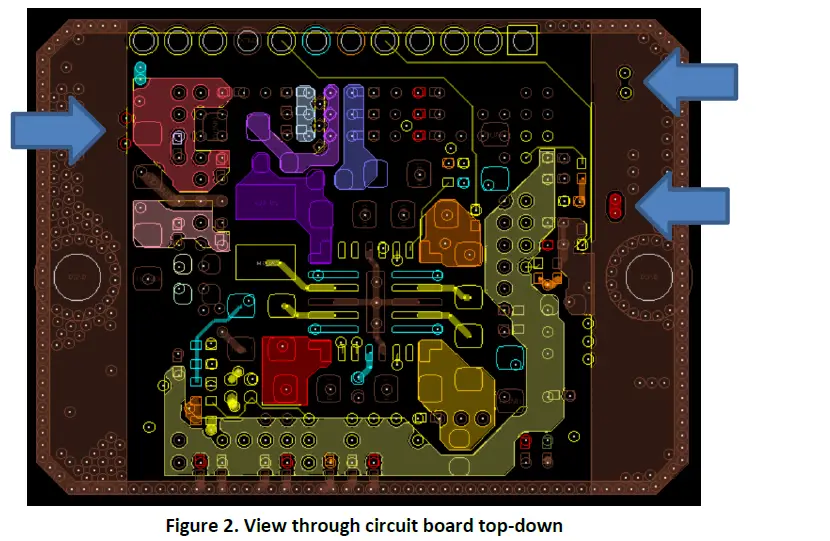
センサー ボードは、過熱を避けるために最大 5 ワットを排出する必要があります。設計には、この転送を実行するように設計された何らかのヒートシンクに熱的に結合する必要がある 0.125 つの表面が含まれています。これらは、ネジ穴があるボードの側面の端にあります。研磨された金属表面は、端から約 2 インチ内側でボードの底部に接触する必要があります。表面を緩和して、底部の XNUMX つのビア領域がショートしないようにすることができます。ビアの上には絶縁を提供するソルダー マスクがありますが、振動のある環境では、ビアの上に空間を作成するのが最も安全です。図 XNUMX は、ビア領域の位置を示しています。
アンテナの向き
アプリケーション ファームウェアはセンサーのどの向きでも動作できますが、一部のビルド済みアプリケーションでは特定の向きを前提としている場合があります。ソフトウェアで構成されている向きがセンサーの実際の配置と一致していることを確認してください。
エンクロージャとレドームの考慮事項
センサーの上にカバーを作ることは可能ですが、カバーは材料の半波長の倍数にすることでレーダーから見えなくなるようにする必要があります。これについては、TI のアプリケーション ノートのセクション 5 で詳しく説明されています。 https://www.ti.com/lit/an/spracg5/spracg5.pdfD3エンジニアリングは、レドーム設計に関するコンサルティングサービスを提供しています。
インターフェース
RS-x843AOP モジュールには、12 ピン ヘッダーという 112 つのインターフェイスしかありません。ヘッダーは Samtec P/N SLM-01-XNUMX-GS です。複数の嵌合オプションがあります。さまざまなソリューションについては、Samtec にお問い合わせください。
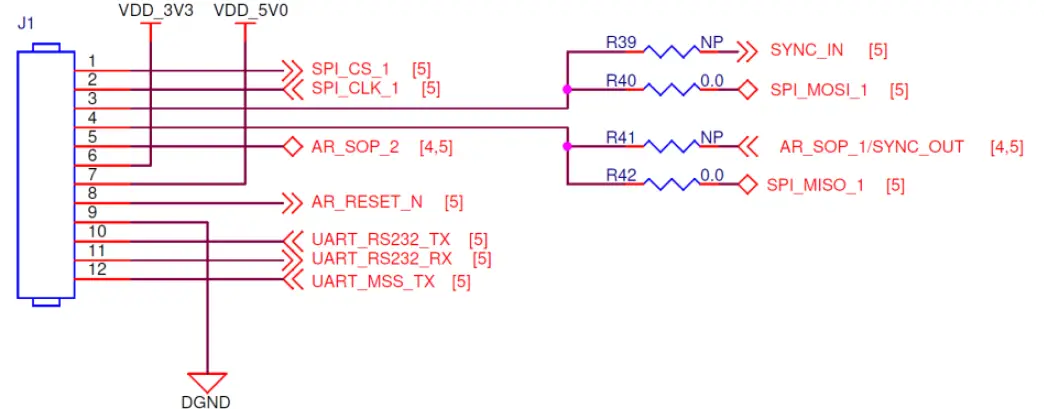
図3. 12ピンヘッダー
ヘッダーのピン配置の詳細については、以下の表を参照してください。ロードされたソフトウェアに応じて、ほとんどの I/O は汎用 I/O としても使用できることに注意してください。これらはアスタリスクで示されます。
表2. 12ピンヘッダーピンリスト
| ピン番号 | デバイスボール番号 | 方向WRTセンサー | 信号名 | 関数 / デバイスピンの機能 | 巻tage範囲 |
| 1* | C2 | 入力 | SPI_CS_1 | SPI チップセレクト GPIO_30 SPIA_CS_N CAN_FD_TX |
0~3.3V |
| 2* | D2 | 入力 | SPI_CLK_1 | SPI クロック GPIO_3 SPIA_CLK CAN_FD_RX 構文 |
0~3.3V |
| ピン番号 | デバイスボール番号 | 方向WRTセンサー | 信号名 | 機能 / デバイスピンの機能 | 巻tage範囲 |
| 3* | U12/F2 | 入力 | 同期_IN SPI_MOSI_1 | 同期入力
SPI メイン出力 セカンダリ入力 |
0~3.3V |
| 4* | M3/D1 | 入力または出力 | AR_SOP_1 同期出力 SPI_MISO_1 | ブートオプション入力同期出力SPIメイン入力セカンダリ出力 SOP[1]、GPIO_29、SYNC_OUT、DMM_MUX_IN、SPIB_CS_N_1、SPIB_CS_N_2 GPIO_20、SPIA_MISO、CAN_FD_TX |
0~3.3V |
| 5* | バージョン10 | 入力 | AR_SOP_2 | ブートオプション入力、高はプログラム、低は実行 SOP[2]、GPIO_27、PMIC_CLKOUT、CHIRP_START、CHIRP_END、FRAME_START、EPWM1B、EPWM2A |
0~3.3V |
| 6 | 該当なし | 出力 | VDD_3V3 | 3.3ボルト出力 | 3.3ボルト |
| 7 | 該当なし | 入力 | VDD_5V0 | 5.0ボルト入力 | 5.0ボルト |
| 8 | 11代 | 入出力 | AR_RESET_N | RFIC NRESETをリセットします | 0~3.3V |
| 9 | 該当なし | 地面 | DGND | 巻tag戻る | 0ボルト |
| 10 | 16代 | 出力 | UART_RS232_TX | コンソール UART TX (注: RS-232 レベルではありません) GPIO_14、RS232_TX、MSS_UARTA_TX、MSS_UARTB_TX、BSS_UART_TX、CAN_FD_TX、I2C_SDA、EPWM1A、EPWM1B、NDMM_EN、EPWM2A |
0~3.3V |
| 11 | バージョン16 | 入力 | UART_RS232_RX | コンソール UART RX (注: RS-232 レベルではありません) GPIO_15、RS232_RX、MSS_UARTA_RX、BSS_UART_TX、MSS_UARTB_RX、CAN_FD_RX、I2C_SCL、EPWM2A、EPWM2B、EPWM3A |
0~3.3V |
| 12 | E2 | 出力 | UART_MSS_TX | データ UART TX (注: RS-232 レベルではありません) GPIO_5、SPIB_CLK、MSS_UARTA_RX、MSS_UARTB_TX、BSS_UART_TX、CAN_FD_RX |
0~3.3V |
設定
RS-x843AOP センサーは、コンソール UART を介してプログラム、構成、および起動されます。
要件
- TI mmWave SDK: https://www.ti.com/tool/MMWAVE-SDK
- TI Uniflash ユーティリティ: https://www.ti.com/tool/UNIFLASH
- TI mm波ビジュアライザー: https://dev.ti.com/gallery/view/mmwave/mmWave_Demo_Visualizer/ver/3.5.0/
- RS-232 から TTL へのアダプタ (ヘッダーと接続するリボン ケーブル付き) または D3 AOP USB パーソナリティ ボード
- 5ボルト電源、定格電流1.5A以上
プログラミング
プログラムするには、ボードをリセットするか、リセットの立ち上がりエッジで AR_SOP_2 信号 (ピン 5) をハイにして電源を入れる必要があります。その後、RS-232 から TTL へのアダプタを備えた PC シリアル ポート、または AOP USB パーソナリティ ボードを備えた PC USB ポートを使用して、ピン 10 と 11 を介してセンサーと通信します。アダプタからボードへの接地接続も確保してください。TI の Uni フラッシュ ユーティリティを使用して、RFIC に接続されたフラッシュをプログラムします。デモ アプリケーションは mm Wave SDK 内にあります。例:ample: “C:\ti\mmwave_sdk_03_05_00_04\packages\ti\demo\xwr64xx\mmw\xwr64xxAOP_mmw_demo.bin”。D3エンジニアリングは、他にも多くのカスタマイズされたアプリケーションを提供しています。
アプリケーションの実行
実行するには、ボードをリセットするか、AR_SOP_2 信号 (ピン 5) をオープンにするか、リセットの立ち上がりエッジの間ローに保持して電源を入れる必要があります。その後、ホストはセンサーのコマンド ラインと通信できます。RS-232 レベルのホストを使用している場合は、RS-232 から TTL へのアダプタを使用する必要があります。コマンド ラインは実行中のアプリケーション ソフトウェアによって異なりますが、mmWave SDK デモ アプリケーションを使用している場合は、SDK のインストール内にコマンド ラインのドキュメントがあります。また、TI mm Wave Visualizer を使用してセンサーを構成、実行、および監視することもできます。これは、 web アプリケーションまたはローカル使用のためにダウンロードできます。標準デモ アプリケーションでは、センサーからのデータ出力はピン 12 (UART_MSS_TX) で利用できます。データ形式は、mm Wave SDK のドキュメントに記載されています。他の機能を実行し、周辺機器を異なる方法で使用する他のソフトウェアを作成することもできます。
表 3. 改訂履歴
| リビジョン | 日付 | 説明 |
| 0.1 | 2021-02-19 | 新規作成 |
| 0.2 | 2021-02-19 | その他のピン機能とレドームおよびアンテナ情報を追加しました |
| 0.3 | 2022-09-27 | 説明 |
| 0.4 | 2023-05-01 | RS-1843AOP の FCC ステートメントの追加 |
| 0.5 | 2024-01-20 | RS-1843AOP に関する FCC および ISED ステートメントの訂正 |
| 0.6 | 2024-06-07 | RS-1843AOP に関する FCC および ISED ステートメントのさらなる修正 |
| 0.7 | 2024-06-25 | モジュラー承認クラス 2 許可変更テスト計画の追加 |
| 0.8 | 2024-07-18 | 限定モジュラー承認情報の改良 |
| 0.9 | 2024-11-15 | RS-6843AOPのコンプライアンスセクションを追加しました |
RS-6843AOP RF コンプライアンス通知
以下の RF 放射に関する記述は、RS-6843AOP モデル レーダー センサーにのみ適用されます。
FCC および ISED 識別ラベル
RS-6843AOP デバイスは、FCC Part 15 および ISED ICES-003 に準拠していることが認定されています。デバイスのサイズが大きいため、必要な FCC ID と付与者コードが以下のマニュアルに記載されています。
FCC ID: 2ASVZ-02
サイズが大きいため、会社コードを含む必要な IC ID は、このマニュアルの下部に記載されています。
IC:30644-02
FCC コンプライアンス声明
この機器は、FCC 規則のパート 15 に従ってテストされ、クラス A デジタル デバイスの制限に準拠していることが確認されています。これらの制限は、機器が商業環境で操作されるときに有害な干渉に対して適切な保護を提供するように設計されています。この機器は、無線周波数エネルギーを生成、使用、および放射する可能性があり、取扱説明書に従って設置および使用しないと、無線通信に有害な干渉を引き起こす可能性があります。住宅地域でこの機器を操作すると、有害な干渉を引き起こす可能性があり、その場合、ユーザーは自己負担で干渉を修正する必要があります。
このデバイスは、FCC 規則のパート 15 に準拠しています。操作には次の XNUMX つの条件が適用されます。
- このデバイスは有害な干渉を引き起こすことはありません。
- このデバイスは、望ましくない操作を引き起こす可能性のある干渉を含め、受信した干渉を受け入れる必要があります。 コンプライアンスの責任者によって明示的に承認されていない変更または修正は、機器を操作するユーザーの権限を無効にする可能性があることに注意してください。
コンプライアンス責任者によって明示的に承認されていない変更または修正を行うと、ユーザーの機器の操作権限が無効になる可能性があります。
FCCRF曝露ステートメント
この機器は、制御されていない環境に対して規定された FCC 放射線被曝制限に準拠しています。この送信機は、他のアンテナまたは送信機と一緒に設置したり、連動して動作させたりしないでください。FCC 無線周波数被曝制限を超える可能性を回避するために、この機器は、通常動作時にアンテナと身体の間の距離を最低 20 cm (7.9 インチ) 離して設置および動作させる必要があります。ユーザーは、RF 被曝コンプライアンスを満たすために、特定の操作手順に従う必要があります。
ISED非干渉免責事項
このデバイスには、カナダのイノベーション、科学、経済開発省のライセンス免除 RSS に準拠したライセンス免除の送信機/受信機が含まれています。
操作には次の 2 つの条件が適用されます。
- このデバイスは干渉を引き起こすことはありません。
- このデバイスは、デバイスの望ましくない動作を引き起こす可能性のある干渉を含め、あらゆる干渉を受け入れる必要があります。
このデバイスはカナダの ICES-003 クラス A 仕様に準拠しています。 CAN ICES-003(A) / NMB-003(A)。
ISEDRF曝露ステートメント
この装置は、制御されていない環境に対して定められたISEDRSS-102放射線被曝制限に準拠しています。 この機器は、ラジエーターと身体の任意の部分との間に20 cm(7.9インチ)以上の距離を置いて設置および操作する必要があります。 この送信機は、他のアンテナまたは送信機と同じ場所に配置したり、一緒に操作したりしないでください。
屋外での操作
この機器は屋外でのみ操作することを想定しています。
FCC および ISED モジュラー承認通知
このモジュールは限定モジュール承認に基づいて承認されましたが、モジュールにはシールドがないため、構造/材料/構成が同一でない他の各ホストは、C2PC 手順に従った適切な評価を伴うクラス II 許可変更を通じて追加する必要があります。このセクションでは、KDB 996369 D03 に従ってモジュール統合手順を示します。
適用ルール一覧
セクション1.2を参照してください。
具体的な運用使用条件の概要
このモジュラー送信機は、製造元によってテストされ承認された特定のアンテナ、ケーブル、および出力電力構成でのみ使用が承認されています (D3)。製造元によって明示的に指定されていない無線、アンテナ システム、または出力への変更は許可されておらず、無線が該当する規制当局に準拠しなくなる可能性があります。
限定モジュール手順
この統合ガイドの残りの部分とセクション 1.8 を参照してください。
トレースアンテナの設計
外部トレースアンテナに関する規定はありません。
RF 暴露条件
セクション1.3を参照してください。
アンテナ
このデバイスは統合アンテナを採用しており、これは使用が承認されている唯一の構成です。コンプライアンス責任者によって明示的に承認されていない変更や修正を行うと、ユーザーの機器操作権限が無効になる場合があります。
ラベルとコンプライアンス情報
最終製品には、物理ラベルを貼付するか、KDB 784748 D01 および KDB 784748 に従って、「送信機モジュール FCC ID: 2ASVZ-02、IC: 30644-02 を含む」または「FCC ID: 2ASVZ-02、IC: 30644-02 を含む」と記載された電子ラベルを使用する必要があります。
テストモードと追加のテスト要件に関する情報
セクション1.8を参照してください。
追加テスト、パート15サブパートB免責事項
このモジュラー送信機は、認可書に記載されている特定の規則部分についてのみ FCC 認可を受けており、ホスト製品の製造元は、モジュラー送信機の認可書の対象外のホストに適用されるその他の FCC 規則に準拠する責任を負います。最終的なホスト製品には、モジュラー送信機を取り付けた状態でパート 15 サブパート B のコンプライアンス テストが必要です。
EMI に関する考慮事項
このモジュールは単独で EMI 放射に合格することが確認されていますが、追加の RF ソースと併用する場合は、混合製品を防ぐために注意が必要です。電気および機械設計に関しては、混合製品の作成を避け、追加の EMI 放射を抑制/遮蔽するために、ベスト プラクティスの設計を使用する必要があります。ホスト メーカーは、モジュールをホスト コンポーネントまたはプロパティに配置することで非線形相互作用によって追加の非準拠制限が発生する場合に備えて、RF 設計エンジニアリング テストと評価を「ベスト プラクティス」として推奨する D04 モジュール統合ガイドを使用することをお勧めします。このモジュールは別売りされておらず、このモジュール認証の受領者 (Define Design Deploy Corp.) 以外のホストにはインストールされません。将来、このモジュールが Define Design Deploy Corp. の他の同一でないホストに統合される場合は、FCC 規則に対する適切な評価を行った後、LMA を拡張して新しいホストを含める予定です。
クラス 2 許可変更テスト計画
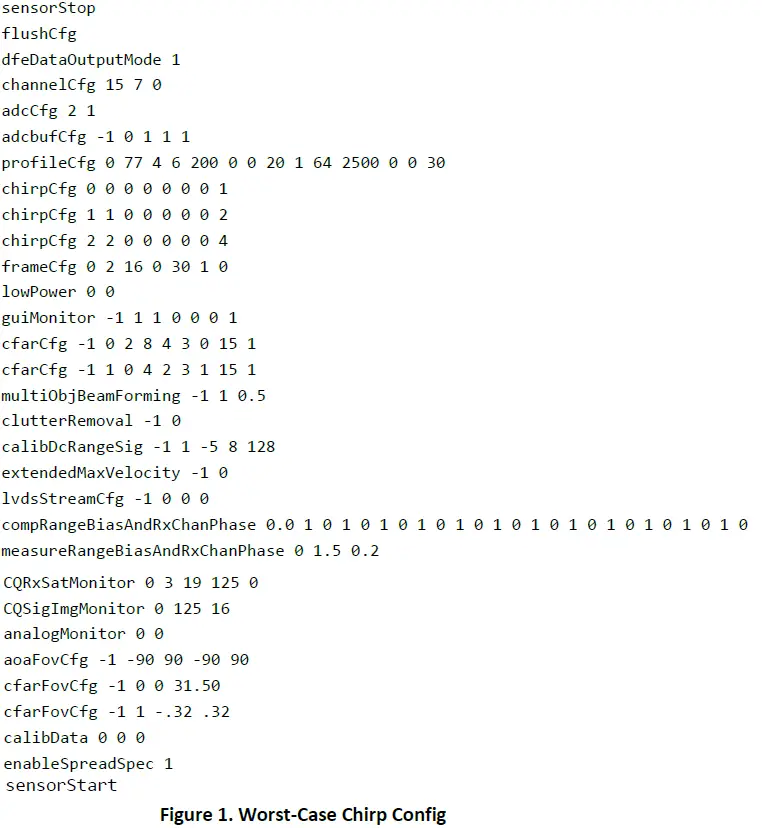
このモジュールは、Define Design Deploy Corpの特定のホスト、モデル:RS-6843AOPCに限定されています。このモジュールを異なるホストタイプのエンドデバイスで使用する場合、エンドデバイスはコンプライアンスが維持されていることを確認するためにテストされ、その結果はDefine Design Deploy Corp. dba D3によってクラス2の許容変更として提出される必要があります。テストを実行するには、最悪のケースのチャーププロfile 操作を開始するには、図 1 に示すように、ファームウェアにハードコードするか、コマンド UART ポートに入力する必要があります。
この構成を有効にした後、以下に説明するように、該当する機関の仕様への準拠をテストします。
テストの目的: 製品の電磁放射を確認します。
仕様:
- 送信出力は FCC パート 15.255(c) に準拠し、EIRP の制限は 20 dBm です。
- FCC Part 15.255(d) に従った不要なスプリアス放射、FCC 40 に記載されている帯域内では FCC 15.209 に従った 15.205 GHz 未満の制限、および 85 GHz 以上では 3 m で 40 dBμV/m の制限
設定
- 製品を無響室内の回転台に置きます。
- 測定アンテナを製品から 3 メートルの距離にあるアンテナ マスト上に配置します。
- 基本電力設定の場合、送信機は最高の総電力と最高の電力スペクトル密度で連続モードで動作し、継続的なコンプライアンスを確認します。
- バンドエッジコンプライアンスのために、変調タイプごとに最も広い帯域幅と最も狭い帯域幅で連続モードで動作するように送信機を設定します。
- 200 GHz までの放射スプリアス放出については、次の XNUMX つのパラメータをテストする必要があります。
- 最も広い帯域幅、
- 最高の総合力、そして
- 最高のパワースペクトル密度。
- 無線モジュールの初期テスト レポートによると、これらの条件がすべて同じモードで組み合わされていない場合は、複数のモードをテストする必要があります。つまり、これらの 3 つのパラメータを持つモードがテストされ、確認されるまで、サポートされているすべての変調、データ レート、およびチャネル帯域幅を使用して、送信機を低、中、および高チャネルで連続モードで動作するように設定します。
回転と仰角:
- ターンプラットフォームを 360 度回転させます。
- アンテナを1メートルから4メートルまで徐々に上げます。
- 目的: 放射を最大化し、1 GHz 未満の準尖頭値制限および 1 GHz を超えるピーク/平均制限への準拠を検証し、適切な制限と比較します。
周波数スキャン:
- 初期スキャン: 30 MHz から 1 GHz までの周波数範囲をカバーします。
- 後続のスキャン: 1 GHz を超える測定用に測定設定を変更します。
検証:
- FCCパート15.255(c)(2)(iii)に従って、通過帯域60~64GHz内での基本放射レベルを確認します。
- FCCパート15.255(d)に従って高調波をチェックします。
拡張スキャン:
- 周波数範囲のスキャンを続行します:
- 1〜18 GHz
- 18〜40 GHz
- 40〜200 GHz
スプリアスエミッション:
- 準尖頭値、尖頭値、平均限度値に対して検証します。
RS-6843AOP RF 特別コンプライアンス通知
以下の RF 放射に関する記述は、RS-6843AOP モデル レーダー センサーにのみ適用されます。
FCC コンプライアンス声明
CFR 47 パート 15.255 ステートメント:
使用上の制限は次のとおりです。
- 一般事項。衛星上で使用される機器については、本条項の規定に基づく運用は許可されない。
- 航空機での操作。航空機での操作は、以下の条件の下で許可されます。
- 航空機が地上にあるとき。
- 飛行中は、以下の例外を除き、航空機内の閉鎖された専用機内通信ネットワーク内でのみ行われます。
- 外部構造センサーまたは外部カメラが航空機構造の外側に取り付けられている無線航空電子機器内部通信 (WAIC) アプリケーションでは、機器を使用しないでください。
- このセクションの(b)(3)項で許可されている場合を除き、航空機の機体/胴体によるRF信号の減衰がほとんどない航空機では機器を使用してはならない。
- 電磁妨害センサー/レーダー装置は、乗客の個人用携帯電子機器(スマートフォン、タブレットなど)に搭載されている場合、59.3~71.0GHzの周波数帯域でのみ動作することができ、本項の(b)(2)(i)項および本項の(c)(2)項から(c)(4)項の関連要件に準拠する必要があります。
- 無人航空機に搭載されたフィールド妨害センサー/レーダー装置は、送信機のピーク EIRP が 60 dBm を超えないことを条件に、64 ~ 20 GHz の周波数帯域内で動作できます。送信機の連続オフ時間の合計は、16.5 ミリ秒の連続間隔内で少なくとも 33 ミリ秒で、121.92 ミリ秒以上である必要があります。動作は、地上から最大 400 メートル (XNUMX フィート) までに制限されます。
ISEDコンプライアンスステートメント
RSS-210 Annex J によれば、この Annex に基づいて認定されたデバイスは衛星で使用することはできません。
航空機内で使用するデバイスは、以下の条件に従って許可されます。
- J.2(b)で許可されている場合を除き、デバイスは航空機が地上にあるときにのみ使用してください。
- 機内で使用するデバイスには以下の制限が適用されます。
- これらは、航空機内の閉鎖された専用機内通信ネットワーク内で使用されるものとする。
- 外部構造センサーまたは外部カメラが航空機構造の外側に取り付けられている無線航空電子工学内部通信(WAIC)アプリケーションでは使用しないでください。
- 無人航空機(UAV)に搭載され、J.2(d)に準拠している場合を除き、RF減衰がほとんどまたは全くない機体/胴体を備えた航空機では使用しないでください。
- 59.3~71.0GHz帯域で動作するデバイスは、以下の条件をすべて満たしている場合を除き、使用しないでください。
- 彼らはFDSです
- 個人用の携帯電子機器に搭載されている
- これらは、J.3.2(a)、J.3.2(b)、およびJ.3.2(c)の関連要件に準拠しています。
- デバイスのユーザーマニュアルには、J.2(a)およびJ.2(b)に示す制限を示すテキストを含める必要があります。
- UAV に配備される FDS デバイスは、以下のすべての条件に準拠する必要があります。
- 60~64GHz帯で動作する
- 無人航空機の高度運用は、カナダ運輸省が定めた規制(例:地上122メートル以下の高度)に制限されています。
- これらはJ.3.2(d)に準拠している。
著作権 © 2024 D3エンジニアリング
よくある質問(FAQ)
- Q: RS-6843AOP モデルの FCC ID は何ですか?
A: このモデルの FCC ID は 2ASVZ-02 です。 - Q: RS-6843AOPレーダーのコンプライアンス規格は何ですか? センサー?
A: センサーは FCC Part 15 および ISED ICES-003 規制に準拠しています。
ドキュメント / リソース
 |
D3エンジニアリング 2ASVZ-02 DesignCore mmWaveレーダーセンサー [pdf] インストールガイド 2ASVZ-02、2ASVZ02、2ASVZ-02 DesignCore mmWave レーダーセンサー、2ASVZ-02、DesignCore mmWave レーダーセンサー、mmWave レーダーセンサー、レーダーセンサー、センサー |



