![]()
RASPBERRY Pi 用ビルディングオートメーションカード
ユーザーズガイド バージョン 4.1
SequentMicrosystems.com
概要

当社の第 8 世代のビルディング オートメーション カードは、ビルディング オートメーション システムに必要なすべての入力と出力を Raspberry Pi プラットフォームに提供します。4 レベルまで積み重ね可能なこのカードは、XNUMX から XNUMX までのすべての Raspberry Pi バージョンで動作します。
Raspberry Pi の GPIO ピンのうち 2 つが I23C 通信に使用されます。 別のピンが割り込みハンドラーに割り当てられ、XNUMX 個の GPIO ピンをユーザーが使用できるようにします。
個別に選択可能な 0 つのユニバーサル入力により、10 ~ 1 V の信号を読み取ったり、接点の閉鎖をカウントしたり、10K または 0K サーミスタを使用して温度を測定したりできます。10 つの 24 ~ 485 V のプログラム可能な出力により、調光器やその他の産業用デバイスを制御できます。1 つの 18 VAC トライアック出力により、AC リレーや加熱および冷却装置を制御できます。LED インジケーターにより、すべての出力の状態が表示されます。RS20/MODBUS ポートにより、ほぼ無制限の拡張が可能です。最後に、新しい XNUMX-WIRE ポートを使用して、DSXNUMXBXNUMX センサーから温度を読み取ることができます。
すべての入力の TVS ダイオードは、カードを外部 ESD から保護します。オンボードのリセット可能なヒューズは、偶発的なショートからカードを保護します。単一の 24V AC または DC 電源は、Raspberry Pi に 5V/3A を供給できます。
特徴
- XNUMX つのジャンパー設定可能なユニバーサル、アナログ/デジタル入力
- 0-10V 入力または
- 接点閉鎖カウンタ入力または
- 1K/10K 温度センサー入力
- 0 つの 10-XNUMXV 出力
- 1A/48VAC ドライバーを備えた XNUMX つのトライアック出力
- XNUMX つの汎用 LED
- RS485/MODBUS ポート
- バッテリーバックアップ付きリアルタイムクロック
- オンボード押しボタン
- 1-WIREインターフェース
- すべての入力での TVS 保護
- オンボード ハードウェア ウォッチドッグ
- 24VAC/DC電源
すべての入力と出力にはプラグ可能なコネクタが使用されているため、複数のカードを積み重ねても簡単に配線できます。2 台の Raspberry Pi の上に最大 XNUMX 枚のビルディング オートメーション カードを積み重ねることができます。カードはシリアル IXNUMXC バスを共有し、Raspberry Pi の GPIO ピンのうち XNUMX 個だけを使用して XNUMX 枚のカードすべてを管理します。
4 つの汎用 LED は、アナログ入力またはその他の制御プロセスに関連付けることができます。
オンボードのプッシュボタンは、入力をカットしたり、出力をオーバーライドしたり、Raspberry Pi をシャットダウンしたりするようにプログラムできます。
キットの内容
- Raspberry Pi 用ビルディング オートメーション カード

- 取り付け金具
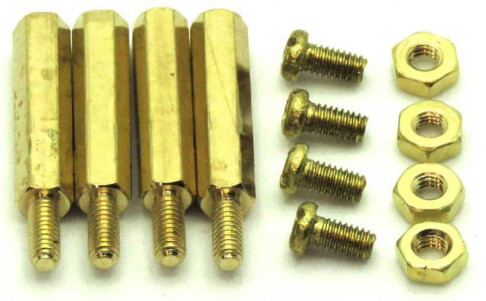 a. M2.5x18mmのオス-メス真鍮製スタンドオフXNUMX個
a. M2.5x18mmのオス-メス真鍮製スタンドオフXNUMX個
b. M2.5x5mm真鍮ネジXNUMX本
c. M2.5真鍮ナットXNUMX個 - XNUMX つのジャンパー。
 ビルディング オートメーション カードを XNUMX つだけ使用する場合は、ジャンパーは必要ありません。 複数のカードを使用する場合は、スタック レベル ジャンパーのセクションを参照してください。
ビルディング オートメーション カードを XNUMX つだけ使用する場合は、ジャンパーは必要ありません。 複数のカードを使用する場合は、スタック レベル ジャンパーのセクションを参照してください。 - 必要なすべてのメス嵌合コネクタ。

クイック スタートアップ ガイド
- ビルディング オートメーション カードを Raspberry Pi の上に差し込み、システムの電源を入れます。
- raspi-config を使用して、Raspberry Pi で I2C 通信を有効にします。
- github.com からソフトウェアをインストールします。
a. ~$ gitクローン https://github.com/SequentMicrosystems/megabas-rpi.git
b. ~$ cd /home/pi/megabas-rpi
c. ~/megabas-rpi$ sudo make install - ~/megabas-rpi$ メガバス
プログラムは、使用可能なコマンドのリストで応答します。
ボードレイアウト

XNUMX つの汎用 LED をソフトウェアで制御できます。 LED をアクティブにして、入力、出力、または外部プロセスのステータスを表示できます。
スタック レベル ジャンパー
コネクタ J3 の左側の XNUMX つの位置は、カードのスタック レベルを選択するために使用されます。
入力選択ジャンパー
0 つのユニバーサル入力は、10 ~ 1V、10K または 100K のサーミスタまたは接点閉鎖 / イベント カウンタを読み取るために、ジャンパで個別に選択できます。 イベント カウンターの最大周波数は XNUMX Hz です。

RS-485/モドバス通信
ビルディング オートメーション カードには、ローカル プロセッサと Raspberry Pi の両方からアクセスできる標準 RS485 トランシーバーが含まれています。必要な構成は、構成コネクタ J3 の XNUMX つのバイパス ジャンパーから設定されます。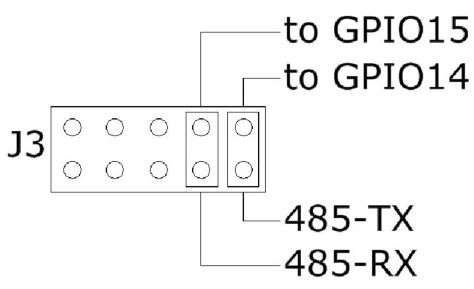
ジャンパーが取り付けられている場合、Raspberry Pi は RS485 インターフェイスを備えたあらゆるデバイスと通信できます。この構成では、ビルディング オートメーション カードは、RS485 プロトコルに必要なハードウェア レベルのみを実装するパッシブ ブリッジです。この構成を使用するには、ローカル プロセッサに RS485 バスの制御を解放するように指示する必要があります。
~$ メガバ [0] wcfgmb 0 0 0 0
ジャンパーが取り外されると、カードは MODBUS スレーブとして動作し、MODBUS RTU プロトコルを実装します。どの MODBUS マスターもカードのすべての入力にアクセスでき、標準の MODBUS コマンドを使用してすべての出力を設定できます。実装されているコマンドの詳細なリストは、GitHub で確認できます。
https://github.com/SequentMicrosystems/megabas-rpi/blob/master/Modbus.md
どちらの構成でも、ローカル プロセッサは RS485 信号を解放 (ジャンパーを取り付け) または制御 (ジャンパーを取り外し) するようにプログラムする必要があります。詳細については、コマンド ラインのオンライン ヘルプを参照してください。
ラズベリーパイヘッダー

電力要件
ビルディング オートメーション カードには、外部の 24VDC/AC 安定化電源が必要です。電源は、右上隅の専用コネクタを介してボードに供給されます (ボード レイアウトを参照)。ボードは、DC または AC 電源のどちらでも使用できます。DC 電源を使用する場合、極性は重要ではありません。ローカルの 5V レギュレータは、Raspberry Pi に最大 3A の電力を供給し、3.3V レギュレータはデジタル回路に電力を供給します。リレーに電力を供給するために、絶縁型 DC-DC コンバータが使用されます。
24VDC/AC電源のみの使用を推奨します
Raspberry Piカードに電力を供給する
複数のビルディング オートメーション カードを積み重ねる場合は、すべてのカードに単一の 24VDC/AC 電源を使用して電力を供給することをお勧めします。ユーザーはケーブルを分割し、各カードに配線する必要があります。
消費電力:
• 50mA @ +24V
ユニバーサルインプット
ビルディング オートメーション カードには 010 つのユニバーサル入力があり、ジャンパー選択により 1V 信号、10K または 100K サーミスタ、または最大 XNUMXHz の接点閉鎖/イベント カウンターを測定できます。

イベントカウンター/連絡先閉鎖の設定 
1Kサーミスタを使用した温度測定構成 
10Kサーミスタを使用した温度測定構成 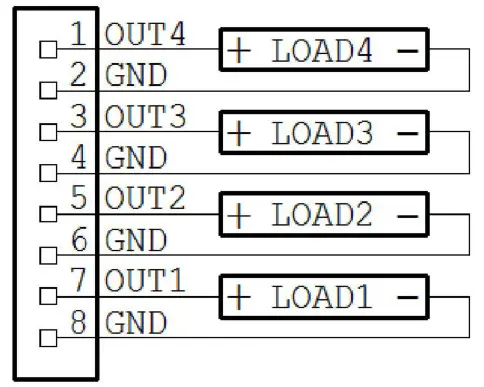
0-10V 出力構成。 最大負荷 = 10mA 
ハードウェア ウォッチドッグ
ビルディング オートメーション カードにはハードウェア ウォッチドッグが組み込まれており、Raspberry Pi ソフトウェアがハングアップした場合でもミッション クリティカルなプロジェクトが継続して実行されることを保証します。電源投入後、ウォッチドッグは無効になり、最初のリセットを受信するとアクティブになります。
デフォルトのタイムアウトは 120 秒です。 起動後、2 分以内に Raspberry Pi からリセットを受信しない場合、ウォッチドッグは電源を切り、10 秒後に電源を復元します。
Raspberry Pi は、ウォッチドッグのタイマーが期限切れになる前に、I2C ポートでリセット コマンドを発行する必要があります。
電源投入後のタイマー期間とアクティブ タイマー期間は、コマンド ラインから設定できます。リセット回数はフラッシュに保存され、コマンド ラインからアクセスしたりクリアしたりできます。すべてのウォッチドッグ コマンドは、オンライン ヘルプ機能で説明されています。
アナログ入力/出力のキャリブレーション
すべてのアナログ入力と出力は工場で調整されていますが、ファームウェア コマンドを使用すると、ユーザーはボードを再調整したり、精度を上げるために調整したりできます。すべての入力と出力は 2 点で調整されます。スケールの両端にできるだけ近い 2 つの点を選択します。入力を調整するには、ユーザーがアナログ信号を提供する必要があります。(例:amp例: 0~10V の入力を校正するには、ユーザーは 10V の調整可能な電源を用意する必要があります。出力を校正するには、ユーザーは出力を目的の値に設定するコマンドを発行し、結果を測定し、値を保存する校正コマンドを発行する必要があります。
値はフラッシュに保存され、入力曲線は直線であると想定されます。キャリブレーション中に間違ったコマンドを入力してミスをした場合は、RESET コマンドを使用して、対応するグループ内のすべてのチャネルを工場出荷時の値にリセットできます。RESET 後、キャリブレーションを再開できます。
最初に出力をキャリブレーションし、次にキャリブレーションされた出力を対応する入力にルーティングすることで、アナログ信号ソースがなくてもボードをキャリブレーションできます。キャリブレーションには次のコマンドを使用できます。
| 0-10V 入力のキャリブレーション: | メガバスクイン |
| 0-10V 入力のリセットキャリブレーション: | メガバスルクイン |
| 10K入力をキャリブレーション: | メガバスクレシン |
| 10K 入力をリセット: | メガバスレクレジン |
| 0-10V 出力のキャリブレーション: | メガバスカットアウト |
| キャリブレーションされた値をフラッシュに保存: | メガバスalta_comanda |
| 0-10V 出力のリセットキャリブレーション: | メガバス再起動 |
ハードウェア仕様
オンボードリセット可能ヒューズ: 1A
0-10V 入力:
| • 最大入力ボリュームtage: | 12V |
| • 入力インピーダンス: | 20KΩ |
| • 解決: | 12ビット |
| • スampルレート: | TBD |
接点閉鎖入力
- 最大カウント周波数: 100 Hz
0-10V 出力:
- 最小出力負荷: 1KΩ
- 解像度: 13 ビット
トライアック出力:
- 最大出力電流: 1A
- 最大出力ボリュームtage:120V
フルスケールでの直線性
アナログ入力は、オンボード プロセッサ内部の 12 ビット A/D コンバータを使用して処理されます。 入力は samp675 Hzで導かれました。
アナログ出力は、16 ビット タイマーを使用して合成された PWM です。 PWM 値の範囲は 0 ~ 4,800 です。
すべての入力と出力はテスト時にエンドポイントでキャリブレーションされ、値はフラッシュに保存されます。
キャリブレーション後、フル スケールでの直線性をチェックし、次の結果を得ました。
| チャネル | 最大エラー | % |
| 0-10V 入力 | 15μV | 0.15% |
| 0-10V出力 | 10μV | 0.10% |
機械仕様

ソフトウェアのセットアップ
- Raspberry Piを準備し、 最新のOS。
- I2C通信を有効にする: ~$ sudo raspi-config
1. ユーザーパスワードの変更 デフォルトユーザーのパスワードを変更する 2. ネットワークオプション ネットワーク設定を構成する 3. ブートオプション 起動時のオプションを設定する 4. ローカリゼーションオプション 一致するように言語と地域の設定を設定します。 5. インターフェースオプション 周辺機器への接続を構成する 6. オーバークロック Piのオーバークロックを設定する 7. 詳細オプション 詳細設定を構成する 8. 更新 このツールを最新バージョンに更新してください 9. raspi-configについて この構成に関する情報 P1 カメラ Raspberry Pi カメラへの接続を有効/無効にする P2 パスワード Piへのリモートコマンドラインアクセスを有効/無効にする P3 VC Pi へのグラフィカル リモート アクセスを有効/無効にします… P4 SPI SPIカーネルモジュールの自動読み込みを有効/無効にする P5 I2C I2Cカーネルモジュールの自動読み込みを有効/無効にする P6 シリアル シリアルポートへのシェルおよびカーネルメッセージの有効化/無効化 P7 1 線式 ワンワイヤインターフェースの有効化/無効化 P8 リモートGPIO GPIOピンへのリモートアクセスを有効/無効にする - github.comからmegabasソフトウェアをインストールします: ~$ git clone https://github.com/SequentMicrosystems/megabas-rpi.git
- ~$ cd /home/pi/megabas-rpi
- ~/megaioind-rpi$ sudo インストール
- ~/megaioind-rpi$ メガバス
プログラムは、使用可能なコマンドのリストで応答します。
オンライン ヘルプを表示するには、「megabas -h」と入力します。
ソフトウェアをインストールしたら、次のコマンドを使用して最新バージョンに更新できます。
~$ cd /home/pi/megabas-rpi
~/megabas-rpi$ git pull
~/megabas-rpi$ sudo make install ![]()
ドキュメント / リソース
 |
Raspberry Pi 用 Pi Hut ビルディングオートメーションカード [pdf] ユーザーガイド Raspberry Pi用ビルディングオートメーションカード、ビルディングオートメーションカード、Raspberry Pi用オートメーションカード、Raspberry Piオートメーションカードビルディング |



