![]()
การ์ดควบคุมอาคารสำหรับ RASPBERRY Pi
คู่มือผู้ใช้เวอร์ชัน 4.1
SequentMicrosystems.com
คำอธิบายทั่วไป

การ์ดควบคุมอาคารรุ่นที่สองของเรานำเสนออินพุตและเอาต์พุตทั้งหมดที่จำเป็นสำหรับระบบควบคุมอาคารบนแพลตฟอร์ม Raspberry Pi การ์ดนี้สามารถต่อซ้อนกันได้ถึง 8 ระดับ และทำงานร่วมกับ Raspberry Pi ทุกเวอร์ชัน ตั้งแต่รุ่น Zero ถึงรุ่น 4
พิน GPIO ของ Raspberry Pi สองพินใช้สำหรับการสื่อสาร I2C มีการจัดสรรพินอื่นสำหรับตัวจัดการอินเตอร์รัปต์ โดยเหลือ 23 พิน GPIO สำหรับผู้ใช้
อินพุตสากลแปดตัวที่เลือกได้ทีละตัว ช่วยให้คุณอ่านสัญญาณ 0-10V นับการปิดหน้าสัมผัส หรือวัดอุณหภูมิโดยใช้เทอร์มิสเตอร์ 1K หรือ 10K เอาต์พุตที่ตั้งโปรแกรมได้ 0-10V สี่ตัวสามารถควบคุมเครื่องหรี่ไฟหรืออุปกรณ์อุตสาหกรรมอื่นๆ เอาต์พุตไตรแอค 24VAC สี่ตัวสามารถควบคุมรีเลย์ AC หรืออุปกรณ์ทำความร้อนและทำความเย็น ไฟแสดงสถานะ LED แสดงสถานะของเอาต์พุตทั้งหมด พอร์ต RS485/MODBUS ช่วยให้ขยายได้แทบไม่จำกัด สุดท้ายแต่ไม่ท้ายสุด พอร์ต 1-WIRE ใหม่สามารถใช้อ่านอุณหภูมิจากเซ็นเซอร์ DS18B20
ไดโอด TVS บนอินพุตทั้งหมดจะปกป้องการ์ดจาก ESD ภายนอก ฟิวส์รีเซ็ตได้บนบอร์ดจะป้องกันไม่ให้เกิดไฟฟ้าลัดวงจรโดยไม่ได้ตั้งใจ แหล่งจ่ายไฟ AC หรือ DC 24V ตัวเดียวสามารถจ่ายไฟ 5V/3A สำหรับ Raspberry Pi ได้
คุณสมบัติ
- จัมเปอร์ XNUMX อินพุตสากลแบบอะนาล็อก/ดิจิตอลที่สามารถตั้งค่าได้
- อินพุต 0-10V หรือ
- ติดต่อปิดเคาน์เตอร์อินพุตหรือ
- อินพุตเซนเซอร์อุณหภูมิ 1K/10K
- สี่เอาต์พุต 0-10V
- เอาต์พุต TRIAC สี่ชุดพร้อมไดรเวอร์ 1A/48VAC
- LED อเนกประสงค์สี่ดวง
- พอร์ต RS485/MODBUS
- นาฬิกาตามเวลาจริงพร้อมแบตเตอรี่สำรอง
- ปุ่มกดออนบอร์ด
- อินเทอร์เฟซ 1 สาย
- การป้องกัน TVS บนอินพุตทั้งหมด
- Watchdog ฮาร์ดแวร์ออนบอร์ด
- แหล่งจ่ายไฟ 24VAC/DC
อินพุตและเอาต์พุตทั้งหมดใช้ขั้วต่อแบบเสียบปลั๊กได้ ซึ่งช่วยให้เดินสายได้ง่ายเมื่อวางการ์ดหลายใบซ้อนกัน สามารถวางการ์ดควบคุมอาคารได้สูงสุด 2 ใบบน Raspberry Pi หนึ่งเครื่อง การ์ดเหล่านี้ใช้บัส IXNUMXC แบบอนุกรมร่วมกันโดยใช้พิน GPIO ของ Raspberry Pi เพียง XNUMX พินเพื่อจัดการการ์ดทั้ง XNUMX ใบ
LED วัตถุประสงค์ทั่วไปทั้งสี่ดวงสามารถเชื่อมโยงกับอินพุตอะนาล็อกหรือกระบวนการควบคุมอื่นๆ
สามารถตั้งโปรแกรมปุ่มกดบนเครื่องเพื่อตัดอินพุต ข้ามเอาต์พุต หรือปิด Raspberry Pi ได้
อะไรอยู่ในชุดของคุณ
- การ์ดสร้างระบบอัตโนมัติสำหรับ Raspberry Pi

- ฮาร์ดแวร์สำหรับติดตั้ง
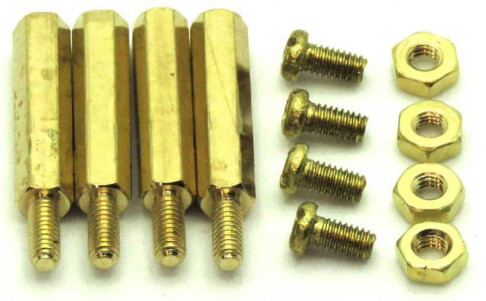 ก. ข้อต่อทองเหลืองตัวผู้-ตัวเมีย M2.5x18 มม. จำนวน XNUMX อัน
ก. ข้อต่อทองเหลืองตัวผู้-ตัวเมีย M2.5x18 มม. จำนวน XNUMX อัน
ข. สกรูทองเหลือง M2.5x5 มม. จำนวน XNUMX ตัว
c. น็อตทองเหลือง M2.5 จำนวน XNUMX ตัว - สองจัมเปอร์
 คุณไม่จำเป็นต้องใช้จัมเปอร์เมื่อใช้การ์ด Building Automation เพียงใบเดียว ดูส่วน STACK LEVEL JUMPERS หากคุณวางแผนที่จะใช้การ์ดหลายใบ
คุณไม่จำเป็นต้องใช้จัมเปอร์เมื่อใช้การ์ด Building Automation เพียงใบเดียว ดูส่วน STACK LEVEL JUMPERS หากคุณวางแผนที่จะใช้การ์ดหลายใบ - ตัวเชื่อมต่อการผสมพันธุ์หญิงที่จำเป็นทั้งหมด

คู่มือการเริ่มต้นใช้งานด่วน
- เสียบการ์ด Building Automation ของคุณที่ด้านบนของ Raspberry Pi และเพิ่มพลังให้กับระบบ
- เปิดใช้งานการสื่อสาร I2C บน Raspberry Pi โดยใช้ raspi-config
- ติดตั้งซอฟต์แวร์จาก github.com:
ก. ~$ คอมไพล์โคลน https://github.com/SequentMicrosystems/megabas-rpi.git
ข. ~$ cd /home/pi/megabas-rpi
ค. ~/megabas-rpi$ sudo make install - ~/megabas-rpi$ เมกะเบส
โปรแกรมจะตอบสนองด้วยรายการคำสั่งที่มีอยู่
แผนผังบอร์ด

สามารถควบคุมไฟ LED สำหรับวัตถุประสงค์ทั่วไปได้สี่ดวงในซอฟต์แวร์ สามารถเปิดใช้งานไฟ LED เพื่อแสดงสถานะของอินพุต เอาต์พุต หรือกระบวนการภายนอก
จัมเปอร์ระดับกอง
ตำแหน่งสามตำแหน่งด้านซ้ายของตัวเชื่อมต่อ J3 ใช้เพื่อเลือกระดับสแต็คของการ์ด:
จัมเปอร์การเลือกอินพุต
อินพุตอเนกประสงค์แปดช่องสามารถเลือกจัมเปอร์แยกกันเพื่ออ่านเทอร์มิสเตอร์ 0-10V, 1K หรือ 10K หรือตัวนับการปิดหน้าสัมผัส/เหตุการณ์ ความถี่สูงสุดของตัวนับเหตุการณ์คือ 100 Hz

RS-485/MODBUS การสื่อสาร
การ์ดควบคุมอาคารประกอบด้วยตัวรับส่งสัญญาณ RS485 มาตรฐานซึ่งสามารถเข้าถึงได้ทั้งโดยโปรเซสเซอร์ภายในและโดย Raspberry Pi การกำหนดค่าที่ต้องการตั้งค่าจากจัมเปอร์บายพาสสามตัวบนขั้วต่อการกำหนดค่า J3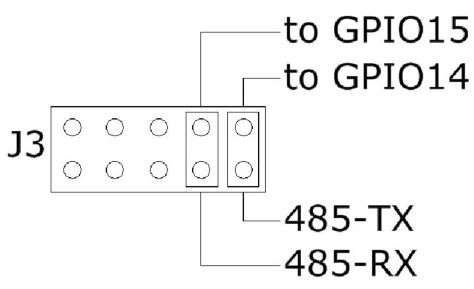
หากติดตั้งจัมเปอร์ Raspberry Pi จะสามารถสื่อสารกับอุปกรณ์ใดๆ ก็ได้ที่มีอินเทอร์เฟซ RS485 ในการกำหนดค่านี้ การ์ดควบคุมอาคารจะเป็นบริดจ์แบบพาสซีฟซึ่งใช้งานเฉพาะระดับฮาร์ดแวร์ที่จำเป็นตามโปรโตคอล RS485 เท่านั้น หากต้องการใช้การกำหนดค่านี้ คุณต้องแจ้งให้โปรเซสเซอร์ภายในเครื่องปล่อยการควบคุมบัส RS485:
~$ เมกะเบส [0] wcfgmb 0 0 0 0
หากถอดจัมเปอร์ออก การ์ดจะทำงานเป็นสเลฟ MODBUS และใช้งานโปรโตคอล MODBUS RTU มาสเตอร์ MODBUS ทุกคนสามารถเข้าถึงอินพุตทั้งหมดของการ์ด และตั้งค่าเอาต์พุตทั้งหมดโดยใช้คำสั่ง MODBUS มาตรฐาน สามารถดูรายการคำสั่งที่ใช้งานโดยละเอียดได้ที่ GitHub:
https://github.com/SequentMicrosystems/megabas-rpi/blob/master/Modbus.md
ในการกำหนดค่าทั้งสองแบบ จำเป็นต้องตั้งโปรแกรมโปรเซสเซอร์ภายในเพื่อปล่อยสัญญาณ RS485 (ติดตั้งจัมเปอร์) หรือควบคุม (ถอดจัมเปอร์ออก) ดูข้อมูลเพิ่มเติมได้จากวิธีใช้บรรทัดคำสั่งออนไลน์
ราสเบอร์รี่ PI เฮดเดอร์

ความต้องการด้านพลังงาน
การ์ดควบคุมอาคารต้องใช้แหล่งจ่ายไฟภายนอกแบบ 24VDC/AC ที่ควบคุมไว้ ไฟจะจ่ายไปยังบอร์ดผ่านขั้วต่อเฉพาะที่มุมขวาบน (ดูเค้าโครงบอร์ด) บอร์ดรับแหล่งจ่ายไฟ DC หรือ AC ก็ได้ หากใช้แหล่งจ่ายไฟ DC ขั้วไฟฟ้าก็ไม่สำคัญ ตัวควบคุมแรงดันไฟฟ้า 5V ในพื้นที่จะจ่ายไฟสูงสุด 3A ให้กับ Raspberry Pi และตัวควบคุมแรงดันไฟฟ้า 3.3V จะจ่ายไฟให้กับวงจรดิจิทัล ตัวแปลง DC-DC แบบแยกส่วนใช้เพื่อจ่ายไฟให้กับรีเลย์
เราแนะนำให้ใช้แหล่งจ่ายไฟ 24VDC/AC เท่านั้น
เพื่อจ่ายไฟให้กับการ์ด Raspberry Pi
หากการ์ดควบคุมอาคารหลายใบวางซ้อนกัน เราขอแนะนำให้ใช้แหล่งจ่ายไฟ 24VDC/AC เพียงแหล่งเดียวเพื่อจ่ายไฟให้กับการ์ดทั้งหมด ผู้ใช้จะต้องแยกสายไฟและเดินสายไฟไปยังการ์ดแต่ละใบ
การใช้พลังงาน:
• 50 มิลลิแอมป์ @ +24V
อินพุตสากล
การ์ดควบคุมอาคารมีอินพุตสากล 010 อินพุตที่สามารถเลือกจัมเปอร์ได้เพื่อวัดสัญญาณ 1V เทอร์มิสเตอร์ 10K หรือ 100K หรือตัวนับการปิด/เหตุการณ์การสัมผัสสูงถึง XNUMXHz

การกำหนดค่าตัวนับเหตุการณ์/การติดต่อปิด 
การกำหนดค่าการวัดอุณหภูมิด้วยเทอร์มิสเตอร์ 1K 
การกำหนดค่าการวัดอุณหภูมิด้วยเทอร์มิสเตอร์ 10K 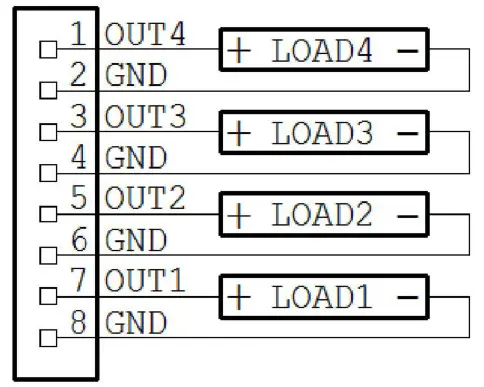
การกำหนดค่าเอาต์พุต 0-10V โหลดสูงสุด = 10mA 
ฮาร์ดแวร์ WATCHDOG
การ์ดควบคุมอาคารประกอบด้วยฮาร์ดแวร์วอทช์ด็อกในตัวที่จะรับประกันว่าโครงการที่สำคัญยิ่งต่อภารกิจของคุณจะยังคงทำงานต่อไป แม้ว่าซอฟต์แวร์ Raspberry Pi จะค้างก็ตาม หลังจากเปิดเครื่อง วอทช์ด็อกจะถูกปิดใช้งาน และจะทำงานได้หลังจากได้รับการรีเซ็ตครั้งแรก
การหมดเวลาเริ่มต้นคือ 120 วินาที เมื่อเปิดใช้งานแล้ว หากไม่ได้รับการรีเซ็ตจาก Raspberry Pi ภายใน 2 นาที watchdog จะตัดพลังงานและกู้คืนหลังจาก 10 วินาที
Raspberry Pi ต้องออกคำสั่งรีเซ็ตบนพอร์ต I2C ก่อนที่ตัวจับเวลาบนวอทช์ด็อกจะหมดเวลา
สามารถตั้งค่าระยะเวลาของตัวจับเวลาหลังจากเปิดเครื่องและระยะเวลาของตัวจับเวลาที่ใช้งานอยู่ได้จากบรรทัดคำสั่ง จำนวนการรีเซ็ตจะถูกเก็บไว้ในแฟลชและสามารถเข้าถึงหรือล้างได้จากบรรทัดคำสั่ง คำสั่งเฝ้าระวังทั้งหมดจะอธิบายไว้ในฟังก์ชันช่วยเหลือออนไลน์
การปรับเทียบอินพุต/เอาต์พุตแบบอะนาล็อก
อินพุตและเอาต์พุตแอนะล็อกทั้งหมดได้รับการปรับเทียบที่โรงงาน แต่คำสั่งเฟิร์มแวร์อนุญาตให้ผู้ใช้ปรับเทียบบอร์ดใหม่หรือปรับเทียบให้มีความแม่นยำมากขึ้น อินพุตและเอาต์พุตทั้งหมดได้รับการปรับเทียบในสองจุด เลือกสองจุดที่ใกล้เคียงกับปลายทั้งสองของมาตราส่วนมากที่สุด เพื่อปรับเทียบอินพุต ผู้ใช้จะต้องให้สัญญาณแอนะล็อก (ตัวอย่างamp: เพื่อปรับเทียบอินพุต 0-10V ผู้ใช้ต้องจัดหาแหล่งจ่ายไฟแบบปรับได้ 10V) เพื่อปรับเทียบเอาต์พุต ผู้ใช้ต้องออกคำสั่งเพื่อตั้งค่าเอาต์พุตเป็นค่าที่ต้องการ วัดผลลัพธ์ และออกคำสั่งปรับเทียบเพื่อบันทึกค่า
ค่าต่างๆ จะถูกเก็บไว้ในแฟลชและเส้นโค้งอินพุตจะถือว่าเป็นเส้นตรง หากเกิดข้อผิดพลาดระหว่างการปรับเทียบโดยพิมพ์คำสั่งผิด สามารถใช้คำสั่ง RESET เพื่อรีเซ็ตช่องทั้งหมดในกลุ่มที่เกี่ยวข้องเป็นค่าจากโรงงานได้ หลังจาก RESET แล้ว ก็สามารถเริ่มการปรับเทียบใหม่ได้
บอร์ดสามารถปรับเทียบได้โดยไม่ต้องใช้แหล่งสัญญาณแอนะล็อก โดยปรับเทียบเอาต์พุตก่อน จากนั้นจึงส่งเอาต์พุตที่ปรับเทียบแล้วไปยังอินพุตที่เกี่ยวข้อง คำสั่งต่อไปนี้มีไว้สำหรับการปรับเทียบ:
| ปรับเทียบอินพุต 0-10V: | เมกะบาส กิน |
| รีเซ็ตการสอบเทียบอินพุต 0-10V: | เมกะบาส อาร์ควิน |
| ปรับเทียบอินพุต 10 รายการ: | เมกะบาส เครซิน |
| รีเซ็ตอินพุต 10K: | เมกะบาส อาร์เครซิน |
| ปรับเทียบเอาต์พุต 0-10V: | เมกะบาส ตัดออก |
| เก็บค่าเทียบมาตรฐานในแฟลช: | เมกะบาส alta_comanda |
| รีเซ็ตการปรับเทียบเอาต์พุต 0-10V: | เมกะบาส วงจรปิด |
ข้อมูลจำเพาะของฮาร์ดแวร์
ฟิวส์รีเซ็ตได้บนบอร์ด: 1A
อินพุต 0-10V:
| • ปริมาณอินพุตสูงสุดtage: | 12โวลต์ |
| • อิมพีแดนซ์อินพุต: | 20 กิโลโอห์ม |
| • ปณิธาน: | 12 บิต |
| • สampอัตรา: | TBD |
อินพุตปิดคอนแทค
- ความถี่การนับสูงสุด: 100 เฮิรตซ์
เอาต์พุต 0-10V:
- โหลดเอาท์พุตขั้นต่ำ: 1KΩ
- ความละเอียด: 13 บิต
เอาท์พุท TRIAC:
- กระแสไฟขาออกสูงสุด: 1A
- ปริมาณการส่งออกสูงสุดtagอี: 120V
เส้นตรงมากกว่าขนาดเต็ม
อินพุตอะนาล็อกได้รับการประมวลผลโดยใช้ตัวแปลง A/D 12 บิตภายในโปรเซสเซอร์ออนบอร์ด อินพุตคือ sampนำที่ 675 Hz.
เอาต์พุตอะนาล็อกถูกสังเคราะห์ PWM โดยใช้ตัวจับเวลา 16 บิต ค่า PWM อยู่ระหว่าง 0 ถึง 4,800
อินพุตและเอาต์พุตทั้งหมดได้รับการปรับเทียบ ณ เวลาทดสอบที่จุดสิ้นสุด และค่าต่างๆ จะถูกเก็บไว้ในแฟลช
หลังจากการสอบเทียบ เราตรวจสอบความเป็นเส้นตรงในระดับเต็มและได้ผลลัพธ์ต่อไปนี้:
| ช่อง | ข้อผิดพลาดสูงสุด | % |
| 0-10V ใน | 15μV | 0.15% |
| 0-10V ออก | 10μV | 0.10% |
ข้อมูลจำเพาะทางกล

การติดตั้งซอฟต์แวร์
- เตรียม Raspberry Pi ของคุณให้พร้อมด้วย ระบบปฏิบัติการล่าสุด
- เปิดใช้งานการสื่อสาร I2C: ~$ sudo raspi-config
1. เปลี่ยนรหัสผ่านผู้ใช้ เปลี่ยนรหัสผ่านสำหรับผู้ใช้เริ่มต้น 2. ตัวเลือกเครือข่าย กำหนดค่าการตั้งค่าเครือข่าย 3. ตัวเลือกการบูต กำหนดค่าตัวเลือกสำหรับการเริ่มต้นระบบ 4. ตัวเลือกการแปล ตั้งค่าภาษาและภูมิภาคให้ตรงกับ.. 5. ตัวเลือกการเชื่อมต่อ กำหนดค่าการเชื่อมต่อกับอุปกรณ์ต่อพ่วง 6. โอเวอร์คล็อก กำหนดค่าการโอเวอร์คล็อกสำหรับ Pi ของคุณ 7. ตัวเลือกขั้นสูง กำหนดการตั้งค่าขั้นสูง 8. อัปเดต อัปเดตเครื่องมือนี้เป็นเวอร์ชันล่าสุด 9. เกี่ยวกับ raspi-config.php ข้อมูลเกี่ยวกับการกำหนดค่านี้ P1 กล้อง เปิด/ปิดการเชื่อมต่อกับกล้อง Raspberry Pi P2 เซฟ เปิด/ปิดการเข้าถึงบรรทัดคำสั่งระยะไกลไปยัง Pi ของคุณ P3 วีเอ็นซี เปิด/ปิดการเข้าถึง Pi ของคุณแบบกราฟิกระยะไกลโดยใช้... P4 เอสพีไอ เปิด/ปิดการโหลดโมดูลเคอร์เนล SPI โดยอัตโนมัติ P5 ไอทูซี เปิด/ปิดการโหลดโมดูลเคอร์เนล I2C โดยอัตโนมัติ P6 ซีเรียล เปิด/ปิดใช้งานข้อความเชลล์และเคอร์เนลไปยังพอร์ตอนุกรม P7 1-สาย เปิด/ปิดอินเทอร์เฟซแบบสายเดียว P8 GPIO ระยะไกล เปิด/ปิดการเข้าถึงพิน GPIO จากระยะไกล - ติดตั้งซอฟต์แวร์ Megabas จาก github.com: ~$ git clone https://github.com/SequentMicrosystems/megabas-rpi.git
- ~$ ซีดี /home/pi/megabas-rpi
- ~/megaioind-rpi$ sudo ทำการติดตั้ง
- ~/megaioind-rpi$ เมกะบาส
โปรแกรมจะตอบสนองด้วยรายการคำสั่งที่มีอยู่
พิมพ์ “megabas -h” เพื่อขอความช่วยเหลือออนไลน์
หลังจากติดตั้งซอฟต์แวร์แล้ว คุณสามารถอัปเดตเป็นเวอร์ชันล่าสุดโดยใช้คำสั่ง:
~$ ซีดี /home/pi/megabas-rpi
~/megabas-rpi$ git ดึง
~/megabas-rpi$ sudo ทำการติดตั้ง ![]()
เอกสาร / แหล่งข้อมูล
 | การ์ดควบคุมอาคาร Pi Hut สำหรับ Raspberry Pi [พีดีเอฟ] คู่มือการใช้งาน การ์ดควบคุมอาคารสำหรับ Raspberry Pi, การ์ดควบคุมอาคาร, การ์ดควบคุมอาคารสำหรับ Raspberry Pi, การ์ดควบคุมอาคาร Raspberry Pi |



