![]() Interfejs kodera v4.2
Interfejs kodera v4.2
Instrukcja użytkownika
Wstęp
(Zadać pytanie)
Enkoder inkrementalny jest najpopularniejszym czujnikiem używanym do sterowania zorientowanego na pole (FOC) silników prądu stałego z magnesami trwałymi bez szczotek (BLDC) lub silników synchronicznych z magnesami trwałymi (PMSM). Czujnik ten podaje na wyjściu względne położenie kątowe w postaci impulsów. Enkoder kwadraturowy zazwyczaj wytwarza dwa wyjścia, które mają impulsy przesunięte w fazie o 90°, jak pokazano na rysunku 1. Przesunięcie fazowe pomiędzy dwoma sygnałami A i B reprezentuje kierunek obrotu. Logika interfejsu kodera wykorzystuje wykrywanie zboczy narastających i opadających zboczy A i B, jak pokazano na rysunku 2. Daje to rozdzielczość czterokrotnie większą od rozdzielczości kodera i zapewnia bardzo wysoką rozdzielczość przy niedrogim koderze.
Poniższy rysunek przedstawia sygnały enkodera w kierunku zgodnym i przeciwnym do ruchu wskazówek zegara.
Rysunek 1. Sygnały enkodera w kierunku zgodnym i przeciwnym do ruchu wskazówek zegara Poniższy rysunek przedstawia wykrywanie zboczy impulsów enkodera dla wyższej rozdzielczości.
Poniższy rysunek przedstawia wykrywanie zboczy impulsów enkodera dla wyższej rozdzielczości.
Rysunek 2. Wykrywanie krawędzi impulsów enkodera w celu uzyskania wyższej rozdzielczości Po wykryciu krawędzi stosuje się liczniki w celu uzyskania położenia kątowego wirnika pod względem kąta elektrycznego, dzięki czemu można go bezpośrednio wykorzystać do FOC. Wartość Angle_count_max reprezentuje całkowitą liczbę krawędzi, które zostaną wykryte podczas jednego mechanicznego obrotu wirnika. Dane wyjściowe dotyczące kąta mieszczą się w zakresie od 0 do 262143, gdzie 262143 oznacza 360°. Zmienność kąta wyjściowego w odniesieniu do krawędzi pokazano na rysunku 3 dla prędkości dodatniej i rysunku 4 dla prędkości ujemnej. Prędkość wyjściowa jest obliczana na podstawie szybkości zmiany położenia kątowego.
Po wykryciu krawędzi stosuje się liczniki w celu uzyskania położenia kątowego wirnika pod względem kąta elektrycznego, dzięki czemu można go bezpośrednio wykorzystać do FOC. Wartość Angle_count_max reprezentuje całkowitą liczbę krawędzi, które zostaną wykryte podczas jednego mechanicznego obrotu wirnika. Dane wyjściowe dotyczące kąta mieszczą się w zakresie od 0 do 262143, gdzie 262143 oznacza 360°. Zmienność kąta wyjściowego w odniesieniu do krawędzi pokazano na rysunku 3 dla prędkości dodatniej i rysunku 4 dla prędkości ujemnej. Prędkość wyjściowa jest obliczana na podstawie szybkości zmiany położenia kątowego.
Do konfiguracji interfejsu enkodera wykorzystywane są trzy parametry:
Poniższy rysunek przedstawia wyjście Theta dla kierunku dodatniego.
Rysunek 3. Wyjście Theta dla kierunku dodatniego Poniższy rysunek przedstawia wyjście Theta dla kierunku ujemnego.
Poniższy rysunek przedstawia wyjście Theta dla kierunku ujemnego.
Rysunek 4. Wyjście Theta dla kierunku ujemnego
Streszczenie (Zadać pytanie)
Poniższa tabela zawiera podsumowanie charakterystyki protokołu IP interfejsu kodera.
| Wersja podstawowa | Ten dokument dotyczy interfejsu kodera v4.2. |
| Obsługiwane rodziny urządzeń | • SoC PolarFire® • PolarFire • RTG4™ • IGLOO® 2 • SmartFusion® 2 |
| Obsługiwany przepływ narzędzi | Wymaga Libero® SoC w wersji 11.8 lub nowszej. |
| Koncesjonowanie | Dla rdzenia dostarczany jest kompletny, zaszyfrowany kod RTL, umożliwiający utworzenie instancji rdzenia za pomocą SmartDesign. Symulację, syntezę i układ można przeprowadzić za pomocą oprogramowania Libero. Interfejs Encoder jest licencjonowany z szyfrowanym RTL, który należy zakupić osobno. Aby uzyskać więcej informacji, zobacz Interfejs enkodera. |
Cechy (Zadać pytanie)
Interfejs kodera ma następujące kluczowe funkcje:
- Oblicza względne położenie kątowe
- Oblicza filtrowaną prędkość wyjściową
Implementacja IP Core w Libero Design Suite (Zadać pytanie)
Rdzeń IP musi być zainstalowany w katalogu IP oprogramowania Libero® SoC. Odbywa się to automatycznie poprzez funkcję aktualizacji katalogu IP w oprogramowaniu Libero SoC lub rdzeń IP można pobrać ręcznie z katalogu.
Po zainstalowaniu rdzenia IP w katalogu IP oprogramowania Libero SoC, rdzeń można skonfigurować, wygenerować i utworzyć instancję w narzędziu SmartDesign w celu umieszczenia na liście projektów Libero.
Wykorzystanie i wydajność urządzenia (Zadać pytanie)
W poniższej tabeli przedstawiono wykorzystanie urządzenia używane w interfejsie kodera.
Tabela 1. Wykorzystanie interfejsu kodera
| Szczegóły urządzenia | Zasoby | Wydajność (MHz) | Pamięci RAM | Bloki matematyczne | Globalne chipy | |||
| Rodzina | Urządzenie | LUT-y | DFF | LSRAM | µSRAM | |||
| SoC PolarFire® | MPFS250T | 398 | 285 | 200 | 0 | 0 | 2 | 0 |
| PolarFire | MPF300T | 387 | 285 | 200 | 0 | 0 | 2 | 0 |
| SmartFusion® 2 | M2S150 | 400 | 285 | 140 | 0 | 0 | 2 | 0 |
![]() Ważny:
Ważny:
- Dane w tej tabeli są przechwytywane przy użyciu typowych ustawień syntezy i układu. Źródło zegara referencyjnego CDR zostało ustawione na Dedykowane, a pozostałe wartości konfiguratora pozostały niezmienione.
- Zegar jest ograniczony do 200 MHz podczas przeprowadzania analizy taktowania w celu uzyskania wartości wydajności.
Opis funkcjonalny
(Zadać pytanie)
Poniższy rysunek przedstawia schemat blokowy interfejsu enkodera.
Rysunek 1-1. Schemat blokowy na poziomie systemu interfejsu kodera
Blok interfejsu enkodera przetwarza sygnały odebrane z QA, QB na odpowiadający im kąt i prędkość. Blok zlicza krawędzie enkodera aż do osiągnięcia wartości angle_count_max_i, po czym ponownie rozpoczyna zliczanie od zera. Wygenerowany kąt jest skalowany do 262144 poprzez pomnożenie go przez współczynnik_kąta_i. Prędkość mierzona jest poprzez zliczanie liczby zdarzeń kodera w stałym okresie czasu zdefiniowanym przez wejście speed_window_i. Filtr służy do filtrowania szumu kwantyzacji z pomiaru prędkości. Stałą czasową filtra można skonfigurować za pomocą wartości filter_factor_i, korzystając z następującego równania:
Stała czasowa filtra = Okres czasu pomiędzy kolejnymi impulsami pwm w połowie dopasowania _ i × 2 współczynnik_filtru_i
Wejście sensor_reset_i służy do znalezienia kąta elektrycznego silnika poprzez wstrzykiwanie prądu stałego przez krótki czas.
Gdy silnik ustawi się pod wprowadzonym kątem, wyjście enkodera jest inicjalizowane wartością 90° lub 270° w zależności od początkowego kierunku obrotu. Oczekuje się, że zliczanie zboczy enkodera rozpocznie się po wykryciu zbocza opadającego na wejściu sensor_reset_i.
Wejście clear_buffer_i może zostać wykorzystane do zresetowania bufora filtra, ponieważ oczekuje się, że bufor filtra zostanie zresetowany po zatrzymaniu silnika.
Wejście kierunku_config_i służy do wstępnego wykrycia kierunku silnika. Gdy silnik zacznie działać, kierunek silnika jest wykrywany na podstawie sygnałów enkodera i wykorzystywany do generowania kąta.
Parametry interfejsu enkodera i sygnały interfejsu
(Zadać pytanie)
W tej sekcji omówiono parametry w konfiguratorze GUI interfejsu enkodera i sygnały we/wy.
2.1 Sygnały wejściowe i wyjściowe (Zadać pytanie)
W poniższej tabeli wymieniono porty wejściowe i wyjściowe interfejsu enkodera.
| Nazwa sygnału | Kierunek | Opis |
| reset_i | Wejście | Aktywny niski asynchroniczny sygnał resetowania |
| sys_clk_i | Wejście | Zegar systemowy |
| fil_trig_i | Wejście | Wejście wyzwalacza filtra. Na tym wejściu musi być podany impuls taktowania o szerokości jednego cyklu zegara. Okresowość impulsu określa sampdługi czas. |
| kierunek_config_i | Wejście | Bit konfiguracji kierunku – używany w czasie kalibracji w celu wyrównania wirnika. Gdy 1, ustawia wirnik w celu uruchomienia w kierunku przeciwnym do ruchu wskazówek zegara lub gdy 0, wyrównuje wirnik w celu uruchomienia w kierunku zgodnym z ruchem wskazówek zegara. |
| wyczyść_bufor_i | Wejście | Generalnie czyści bufor filtra po zatrzymaniu silnika. Przy każdym zatrzymaniu silnika należy wprowadzić impuls o szerokości jednego cyklu zegara. |
| czujnik_reset_i | Wejście | Sygnał resetu czujnika: Po ustawieniu na 1, kąt wirnika jest resetowany do wartości odpowiadającej 90° lub 270°, zgodnie z wejściem kierunku_config_i. Po ustawieniu na 0 (zero) normalna praca. |
| qa_i | Wejście | Wejście enkodera A |
| qb_i | Wejście | Wejście enkodera B |
| prędkość_współczynnik_i | Wejście | Mnożnik skalowania prędkości wyjściowej |
| współczynnik_kąta_i | Wejście | Mnożnik skalowania wyjścia kątowego |
| kąt_liczba_max_i | Wejście | Maksymalna wartość zliczania kątów w odniesieniu do zdarzeń impulsowych enkodera. |
| speed_window_i | Wejście | Okno czasowe do obliczenia prędkości, określone w wielokrotnościach 10 µs. Większe okno czasowe zapewnia lepszą rozdzielczość prędkości, ale ma większe opóźnienia. Aby uzyskać wysoką dynamiczną reakcję prędkości, należy zastosować mniejsze okno czasowe. |
| współczynnik_filtru_i | Wejście | Wartość współczynnika filtra dla filtra – jeśli wartość wynosi n, stała czasowa filtra jest 2^n razy większa od sampczas trwania filtra zdefiniowany przez filt_trig_i. |
| reż | Wyjście | Sygnał kierunku generowany na podstawie sygnałów wejściowych enkodera. |
| speed_done_o | Wyjście | Wskazuje, że obliczenie prędkości jest gotowe do filtrowania (na końcu okna prędkości). Generowany jest impuls o szerokości jednego cyklu sys_clk_i. |
| speed_filter_done_o | Wyjście | Wskazuje prędkość wyjściową po prawidłowym filtrowaniu (w porcie wyjściowym omega_out_o). Generowany jest impuls o szerokości jednego cyklu sys_clk_i. |
| omega_out_o | Wyjście | Wyjście prędkości obrotowej wirnika po filtrowaniu – odpowiednie do wykorzystania jako sprzężenie zwrotne prędkości w trybie sterowania prędkością. |
| kąt_zewnętrzny_o | Wyjście | Elektryczne wyjście kątowe odpowiednie dla FOC. |
| liczba_linii_o | Wyjście | Określa położenie wirnika pod względem liczby linii enkodera (inkrementów) od ostatniego resetu czujnika. Nadaje się do stosowania w operacjach kontroli położenia. |
Diagramy czasowe
(Zadać pytanie)
W tej sekcji omówiono diagram taktowania interfejsu kodera.
Poniższy rysunek przedstawia schemat czasowy interfejsu enkodera.
Rysunek 3-1. Schemat czasowy interfejsu kodera
Stanowisko testowe
(Zadać pytanie)
Do weryfikacji i testowania interfejsu kodera zwanego stanowiskiem testowym użytkownika służy ujednolicony stół testowy. Testbench służy do sprawdzania funkcjonalności interfejsu Encoder IP.
4.1 Symulacja (Zadać pytanie)
Poniższe kroki opisują, jak symulować rdzeń za pomocą stanowiska testowego:
- Otwórz Libero SoC, kliknij zakładkę Katalog, a następnie kliknij Solutions-MotorControl.
- Kliknij dwukrotnie opcję Interfejs kodera, a następnie kliknij przycisk OK. Dokumentacja powiązana z adresem IP jest wymieniona w sekcji Dokumentacja.
 Ważny: Jeśli nie widzisz zakładki Katalog, kliknij View, otwórz menu Windows, a następnie kliknij Katalog, aby był widoczny.
Ważny: Jeśli nie widzisz zakładki Katalog, kliknij View, otwórz menu Windows, a następnie kliknij Katalog, aby był widoczny.
Rysunek 4-1. Rdzeń IP interfejsu enkodera w katalogu Libero SoC
- Na karcie Hierarchia bodźców kliknij środowisko testowe ( encoder_interface_tb.v), wskaż opcję Simulate PreSynth Design, a następnie kliknij opcję Otwórz interaktywnie.
![]() Ważny: Jeśli nie widzisz karty Hierarchia bodźców, kliknij View, otwórz menu Windows, a następnie kliknij Hierarchia bodźców, aby była widoczna.
Ważny: Jeśli nie widzisz karty Hierarchia bodźców, kliknij View, otwórz menu Windows, a następnie kliknij Hierarchia bodźców, aby była widoczna.
Rysunek 4-2. Symulacja projektu przed syntezą
ModelSim otwiera się z testbench file jak pokazano na poniższym rysunku.
Rysunek 4-3. Okno symulacji modeluSim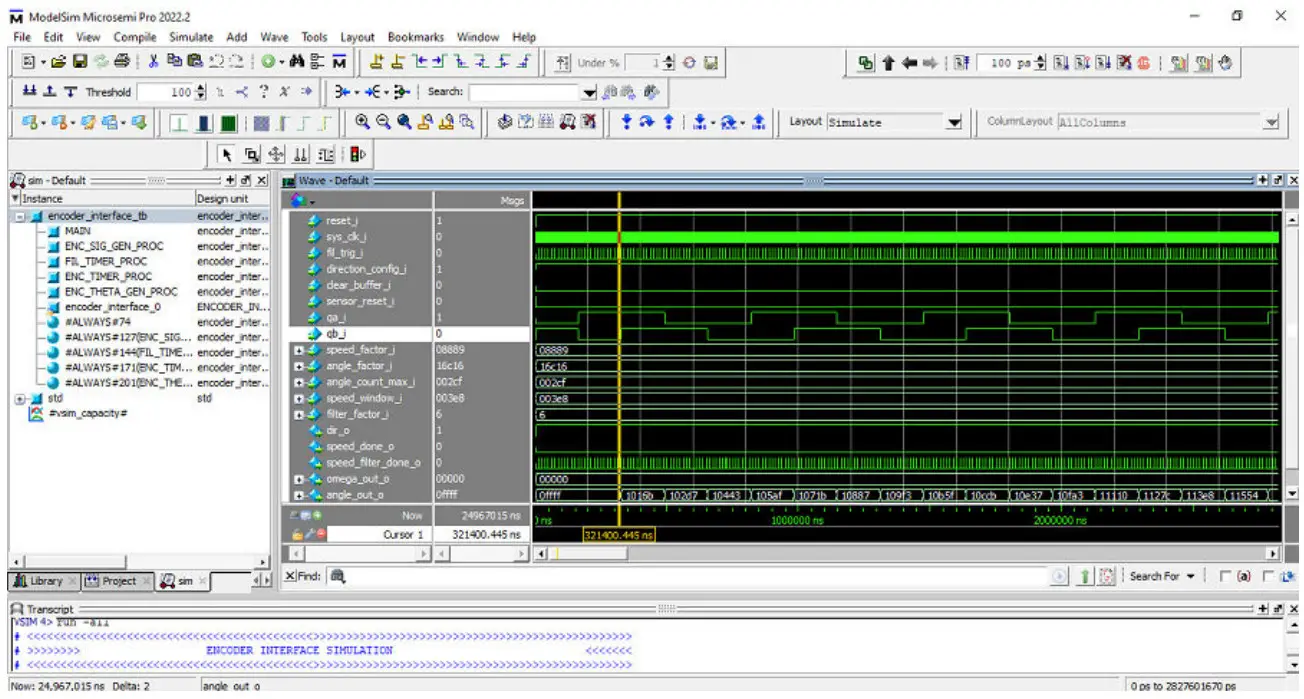
![]() Ważny: Jeśli symulacja zostanie przerwana z powodu limitu czasu działania określonego w pliku .do file, użyj polecenia run -all, aby zakończyć symulację.
Ważny: Jeśli symulacja zostanie przerwana z powodu limitu czasu działania określonego w pliku .do file, użyj polecenia run -all, aby zakończyć symulację.
Historia rewizji
(Zadać pytanie)
Historia rewizji opisuje zmiany, które zostały wprowadzone w dokumencie. Zmiany są wymienione według rewizji, zaczynając od najnowszej publikacji.
Tabela 5-1. Historia zmian
| Rewizja | Data | Opis |
| A | 03/2023 | Poniżej znajduje się lista zmian w wersji A dokumentu: • Przeprowadzono migrację dokumentu do szablonu Microchip. • Zaktualizowano numer dokumentu do DS00004913A z 50200659. • Dodany 3. Diagramy czasowe. • Dodany 4. Stanowisko testowe. |
| 3.0 | — | Poniżej znajduje się podsumowanie zmian wprowadzonych w tej wersji: • Dodano wersję IP do tytułu dokumentu. • Dodano sygnały wyjściowe speed_done_o i speed_filter_done_o. • Usunięto sekcję Parametr konfiguracyjny z Implementacji sprzętu. |
| 2.0 | — | Zaktualizowano dokument o nowe sygnały wyjściowe. |
| 1.0 | — | Wersja 1.0 była pierwszą publikacją tego dokumentu. |
Obsługa mikrochipów FPGA
(Zadać pytanie)
Grupa produktów Microchip FPGA wspiera swoje produkty różnymi usługami wsparcia, w tym Customer Service, Customer Technical Support Center, a webi biura sprzedaży na całym świecie. Klientom sugeruje się odwiedzenie zasobów internetowych firmy Microchip przed skontaktowaniem się z pomocą techniczną, ponieważ jest bardzo prawdopodobne, że na ich pytania zostały już udzielone odpowiedzi.
Skontaktuj się z Centrum Wsparcia Technicznego poprzez webmiejsce na www.microchip.com/support. Podaj numer części urządzenia FPGA, wybierz odpowiednią kategorię obudowy i prześlij projekt files podczas tworzenia zgłoszenia do pomocy technicznej.
Skontaktuj się z działem obsługi klienta, aby uzyskać nietechniczne wsparcie dotyczące produktu, takie jak wycena produktów, aktualizacje produktów, informacje o aktualizacjach, status zamówienia i autoryzacja.
- Z Ameryki Północnej zadzwoń pod numer 800.262.1060
- Z reszty świata zadzwoń pod numer 650.318.4460
- Faks z dowolnego miejsca na świecie: 650.318.8044
Informacje o mikroczipie
Mikrochip Webstrona (Zadać pytanie)
Firma Microchip zapewnia wsparcie online za pośrednictwem naszego webmiejsce na www.microchip.com/. Ten webstrona służy do tworzenia files i informacje łatwo dostępne dla klientów. Niektóre z dostępnych treści obejmują:
- Wsparcie produktu – Arkusze danych i errata, uwagi aplikacyjne i sampprogramy, zasoby projektowe, podręczniki użytkownika i dokumenty pomocy technicznej dotyczące sprzętu, najnowsze wersje oprogramowania i oprogramowanie archiwalne
- Ogólne wsparcie techniczne – Często zadawane pytania (FAQ), prośby o pomoc techniczną, internetowe grupy dyskusyjne, lista członków programu partnerskiego firmy Microchip
- Biznes Microchip – Przewodniki wyboru i zamawiania produktów, najnowsze komunikaty prasowe firmy Microchip, wykazy seminariów i wydarzeń, wykazy biur sprzedaży, dystrybutorów i przedstawicieli fabrycznych firmy Microchip
Usługa powiadamiania o zmianie produktu (Zadać pytanie)
Usługa powiadamiania o zmianach produktów firmy Microchip pomaga na bieżąco informować klientów o produktach firmy Microchip. Subskrybenci otrzymają powiadomienie e-mail o zmianach, aktualizacjach, poprawkach lub erratach związanych z określoną rodziną produktów lub interesującym narzędziem programistycznym.
Aby się zarejestrować, przejdź do www.microchip.com/pcn i postępuj zgodnie z instrukcją rejestracji.
Obsługa klienta (Zadać pytanie)
Użytkownicy produktów Microchip mogą uzyskać pomoc za pośrednictwem kilku kanałów:
- Dystrybutor lub przedstawiciel
- Lokalne Biuro Sprzedaży
- Inżynier ds. rozwiązań wbudowanych (ESE)
- Wsparcie techniczne
Klienci powinni skontaktować się ze swoim dystrybutorem, przedstawicielem lub ESE w celu uzyskania wsparcia. Lokalne biura sprzedaży są również dostępne, aby pomóc klientom. Lista biur sprzedaży i lokalizacji znajduje się w tym dokumencie.
Pomoc techniczna jest dostępna poprzez webstrona pod adresem: www.microchip.com/support
Funkcja ochrony kodu mikroprocesorowego (Zadać pytanie)
Należy zwrócić uwagę na następujące szczegóły dotyczące funkcji ochrony kodu w produktach Microchip:
- Produkty Microchip spełniają specyfikacje zawarte w ich konkretnych Kartach Danych Microchip.
- Firma Microchip uważa, że jej rodzina produktów jest bezpieczna, gdy jest używana zgodnie z przeznaczeniem, zgodnie ze specyfikacjami roboczymi i w normalnych warunkach.
- Microchip ceni i agresywnie chroni swoje prawa własności intelektualnej. Próby naruszenia funkcji ochrony kodu produktu Microchip są surowo zabronione i mogą naruszać ustawę Digital Millennium Copyright Act.
- Ani Microchip, ani żaden inny producent półprzewodników nie może zagwarantować bezpieczeństwa swojego kodu. Ochrona kodu nie oznacza, że gwarantujemy, że produkt jest „niezniszczalny”. Ochrona kodu stale ewoluuje. Microchip zobowiązuje się do ciągłego ulepszania funkcji ochrony kodu naszych produktów.
Informacja prawna (Zadać pytanie)
Niniejsza publikacja i zawarte w niej informacje mogą być używane wyłącznie z produktami firmy Microchip, w tym do projektowania, testowania i integracji produktów firmy Microchip z aplikacją użytkownika. Wykorzystanie tych informacji w jakikolwiek inny sposób narusza niniejsze warunki. Informacje dotyczące aplikacji urządzenia są podawane wyłącznie dla Twojej wygody i mogą zostać zastąpione aktualizacjami. Twoim obowiązkiem jest upewnienie się, że Twoja aplikacja spełnia Twoje wymagania. Skontaktuj się z lokalnym biurem sprzedaży Microchip, aby uzyskać dodatkowe wsparcie lub uzyskaj dodatkowe wsparcie pod adresem www.microchip.com/en-us/support/design-help/client-support-services.
INFORMACJE TE SĄ DOSTARCZANE PRZEZ MICROCHIP „TAKIE, JAKIE SĄ”. MICROCHIP NIE SKŁADA ŻADNYCH OŚWIADCZEŃ ANI GWARANCJI ŻADNEGO RODZAJU, WYRAŹNYCH ANI DOROZUMIANYCH, PISEMNYCH ANI USTNYCH, USTAWOWYCH ANI INNYCH, ZWIĄZANYCH Z INFORMACJAMI, W TYM MIĘDZY INNYMI ŻADNYCH DOROZUMIANYCH GWARANCJI NIENARUSZALNOŚCI, PRZYDATNOŚCI HANDLOWEJ I PRZYDATNOŚCI DO OKREŚLONEGO CELU LUB GWARANCJI ZWIĄZANYCH Z ICH STANEM, JAKOŚCIĄ LUB WYDAJNOŚCIĄ.
W ŻADNYM WYPADKU MICROCHIP NIE PONOSI ODPOWIEDZIALNOŚCI ZA JAKIEKOLWIEK POŚREDNIE, SPECJALNE, KARNE, PRZYPADKOWE LUB WTÓRNE STRATY, USZKODZENIA, KOSZTY LUB WYDATKI JAKIEGOKOLWIEK RODZAJU ZWIĄZANE Z INFORMACJAMI LUB ICH WYKORZYSTANIEM, NIEZALEŻNIE OD PRZYCZYNY, NAWET JEŚLI MICROCHIP ZOSTAŁ POINFORMOWANY O MOŻLIWOŚCI LUB SZKODY SĄ PRZEWIDYWALNE. W PEŁNYM ZAKRESIE DOZWOLONYM PRZEZ PRAWO, CAŁKOWITA ODPOWIEDZIALNOŚĆ MICROCHIP ZA WSZYSTKIE ROSZCZENIA W JAKIKOLWIEK SPOSÓB ZWIĄZANE Z INFORMACJAMI LUB ICH WYKORZYSTANIEM NIE PRZEKROCZY KWOTY OPŁAT, JEŚLI TAKIE BYŁY, KTÓRE ZAPŁACIŁEŚ BEZPOŚREDNIO MICROCHIP ZA INFORMACJE.
Korzystanie z urządzeń Microchip w podtrzymywaniu życia i/lub aplikacjach bezpieczeństwa odbywa się wyłącznie na ryzyko kupującego, a kupujący zgadza się bronić, zabezpieczać i chronić Microchip przed wszelkimi szkodami, roszczeniami, pozwami lub wydatkami wynikającymi z takiego użytkowania. Żadne licencje nie są przekazywane, w sposób dorozumiany lub inny, na mocy jakichkolwiek praw własności intelektualnej Microchip, chyba że zaznaczono inaczej.
Znaki towarowe (Zadać pytanie)
Nazwa i logo Microchip, logo Microchip, Adaptec, AVR, logo AVR, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, logo Microsemi, MOST, logo MOST, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, logo PIC32, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, logo SST, SuperFlash, Symmetricom , SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron i XMEGA są zastrzeżonymi znakami towarowymi firmy Microchip Technology Incorporated w USA i innych krajach.
AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, logo ProASIC Plus, QuietWire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime i ZL są zastrzeżonymi znakami towarowymi firmy Microchip Technology Incorporated w USA
Eliminacja sąsiednich klawiszy, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net, dynamiczne dopasowywanie średniej , DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, programowanie szeregowe w obwodzie, ICSP, INICnet, inteligentne łączenie równoległe, IntelliMOS, łączność międzyukładowa, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX , RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-IS, storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect i ZENA są znakami towarowymi firmy Microchip Technology Incorporated w USA i innych krajach.
SQTP jest znakiem usługowym firmy Microchip Technology Incorporated w USA
Logo Adaptec, Frequency on Demand, Silicon Storage Technology i Symmcom są zastrzeżonymi znakami towarowymi firmy Microchip Technology Inc. w innych krajach.
GestIC jest zarejestrowanym znakiem towarowym firmy Microchip Technology Germany II GmbH & Co. KG, spółki zależnej Microchip Technology Inc., w innych krajach.
Wszystkie inne znaki towarowe wymienione w niniejszym dokumencie są własnością odpowiednich firm.
©2023, Microchip Technology Incorporated i jej spółki zależne. Wszelkie prawa zastrzeżone.
ISBN: 978-1-6683-2164-5
System Zarządzania Jakością (Zadać pytanie)
Aby uzyskać informacje dotyczące systemów zarządzania jakością firmy Microchip, odwiedź stronę www.microchip.com/jakość.
Sprzedaż i serwis na całym świecie
| AMERYKA | AZJA/PACYFIK | AZJA/PACYFIK | EUROPA |
| Biuro korporacyjne 2355 West Chandler Blvd. Chandlera, AZ 85224-6199 Telefon: 480-792-7200 Faks: 480-792-7277 Wsparcie techniczne: www.microchip.com/support Web Adres: www.microchip.com Atlanta Duluth, GA Telefon: 678-957-9614 Faks: 678-957-1455 Austin, Teksas Telefon: 512-257-3370 Boston Westborough, MA Telefon: 774-760-0087 Faks: 774-760-0088 Chicago Itasca, IL Telefon: 630-285-0071 Faks: 630-285-0075 Dallas Addison, TX Telefon: 972-818-7423 Faks: 972-818-2924 Detroit Novi, MI Telefon: 248-848-4000 Houston, Teksas Telefon: 281-894-5983 Indianapolis Noblesville, IN Telefon: 317-773-8323 Faks: 317-773-5453 Telefon: 317-536-2380 Los Angeles Mission Viejo, Kalifornia Telefon: 949-462-9523 Faks: 949-462-9608 Telefon: 951-273-7800 Raleigh, Karolina Północna Telefon: 919-844-7510 Nowy Jork, NY Telefon: 631-435-6000 San Jose, Kalifornia Telefon: 408-735-9110 Telefon: 408-436-4270 Kanada – Toronto Telefon: 905-695-1980 Faks: 905-695-2078 |
Australia – Sydney Telefon: 61-2-9868-6733 Chiny – Pekin Telefon: 86-10-8569-7000 Chiny – Chengdu Telefon: 86-28-8665-5511 Chiny – Chongqing Telefon: 86-23-8980-9588 Chiny – Dongguan Telefon: 86-769-8702-9880 Chiny – Kanton Telefon: 86-20-8755-8029 Chiny – Hangzhou Telefon: 86-571-8792-8115 Chiny – Hongkong SAR Telefon: 852-2943-5100 Chiny – Nankin Telefon: 86-25-8473-2460 Chiny – Qingdao Telefon: 86-532-8502-7355 Chiny – Szanghaj Telefon: 86-21-3326-8000 Chiny – Shenyang Telefon: 86-24-2334-2829 Chiny – Shenzhen Telefon: 86-755-8864-2200 Chiny – Suzhou Telefon: 86-186-6233-1526 Chiny – Wuhan Telefon: 86-27-5980-5300 Chiny – Xian Telefon: 86-29-8833-7252 Chiny – Xiamen Telefon: 86-592-2388138 Chiny – Zhuhai Telefon: 86-756-3210040 |
Indie – Bangalore Telefon: 91-80-3090-4444 Indie – Nowe Delhi Telefon: 91-11-4160-8631 Indie – Pune Telefon: 91-20-4121-0141 Japonia – Osaka Telefon: 81-6-6152-7160 Japonia – Tokio Tel: 81-3-6880-3770 Korea – Daegu Telefon: 82-53-744-4301 Korea – Seul Telefon: 82-2-554-7200 Malezja - Kuala Lumpur Telefon: 60-3-7651-7906 Malezja – Penang Telefon: 60-4-227-8870 Filipiny – Manila Telefon: 63-2-634-9065 Singapur Telefon: 65-6334-8870 Tajwan – Hsin Chu Telefon: 886-3-577-8366 Tajwan – Kaohsiung Telefon: 886-7-213-7830 Tajwan – Tajpej Telefon: 886-2-2508-8600 Tajlandia – Bangkok Telefon: 66-2-694-1351 Wietnam – Ho Chi Minh Telefon: 84-28-5448-2100 |
Austria – Wels Telefon: 43-7242-2244-39 Faks: 43-7242-2244-393 Dania – Kopenhaga Telefon: 45-4485-5910 Faks: 45-4485-2829 Finlandia – Espoo Telefon: 358-9-4520-820 Francja – Paryż Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79 Niemcy – Garching Telefon: 49-8931-9700 Niemcy – Haan Telefon: 49-2129-3766400 Niemcy – Heilbronn Telefon: 49-7131-72400 Niemcy – Karlsruhe Telefon: 49-721-625370 Niemcy – Monachium Tel: 49-89-627-144-0 Fax: 49-89-627-144-44 Niemcy – Rosenheim Telefon: 49-8031-354-560 Izrael – Ra'anana Telefon: 972-9-744-7705 Włochy – Mediolan Telefon: 39-0331-742611 Faks: 39-0331-466781 Włochy – Padwa Telefon: 39-049-7625286 Holandia – Drunen Telefon: 31-416-690399 Faks: 31-416-690340 Norwegia – Trondheim Telefon: 47-72884388 Polska – Warszawa Telefon: 48-22-3325737 Rumunia – Bukareszt Tel: 40-21-407-87-50 Hiszpania – Madryt Tel: 34-91-708-08-90 Fax: 34-91-708-08-91 Szwecja – Göteborg Tel: 46-31-704-60-40 Szwecja – Sztokholm Telefon: 46-8-5090-4654 Wielka Brytania – Wokingham Telefon: 44-118-921-5800 Faks: 44-118-921-5820 |
© 2023 Microchip Technology Inc.
i jej spółki zależne
DS00004913A
Dokumenty / Zasoby
 |
Interfejs kodera MICROCHIP v4.2 [plik PDF] Instrukcja użytkownika v4.2 Interfejs kodera, v4.2, Interfejs kodera, Interfejs |