![]() Encoder Interface v4.2
Encoder Interface v4.2
Brugervejledning
Indledning
(Stil et spørgsmål)
Incremental encoder er den mest almindelige sensor, der bruges til Field Oriented Control (FOC) af Permanent Magnet Brush Less DC (BLDC) eller Permanent-Magnet Synchronous Motor (PMSM). Denne sensor giver relativ vinkelposition som output i form af impulser. En kvadraturkoder frembringer typisk to udgange, som har impulser faseforskydet med 90°, som vist i figur 1. Faseforskydningen mellem de to signaler A og B repræsenterer rotationsretningen. Encodergrænsefladelogikken anvender kantdetektion på stigende og faldende kant af A og B, som vist i figur 2. Dette giver en opløsning, der er fire gange koderopløsningen og producerer en meget høj opløsning fra en lavpriskoder.
Følgende figur viser encodersignalerne i retning med uret og mod uret.
Figur 1. Encoder-signaler i retning med uret og mod uret Følgende figur viser kantdetektion af encoder-impulser for højere opløsning.
Følgende figur viser kantdetektion af encoder-impulser for højere opløsning.
Figur 2. Kantdetektering af indkoderimpulser for højere opløsning Efter kantdetekteringen bruges tællere til at få en rotorvinkelposition i form af en elektrisk vinkel, så den direkte kan bruges til FOC. Angle_count_max værdien repræsenterer det samlede antal kanter, der vil blive detekteret i en mekanisk rotation af rotoren. Vinkeludgangen går fra 0 til 262143, hvor 262143 repræsenterer 360°. Variationen af vinkeloutput i forhold til kanterne er vist i fig. 3 for positiv hastighed og fig. 4 for negativ hastighed. Hastighedsoutput beregnes baseret på hastigheden for ændring af vinkelposition.
Efter kantdetekteringen bruges tællere til at få en rotorvinkelposition i form af en elektrisk vinkel, så den direkte kan bruges til FOC. Angle_count_max værdien repræsenterer det samlede antal kanter, der vil blive detekteret i en mekanisk rotation af rotoren. Vinkeludgangen går fra 0 til 262143, hvor 262143 repræsenterer 360°. Variationen af vinkeloutput i forhold til kanterne er vist i fig. 3 for positiv hastighed og fig. 4 for negativ hastighed. Hastighedsoutput beregnes baseret på hastigheden for ændring af vinkelposition.
Tre parametre bruges til at konfigurere encoder-grænsefladen:
Følgende figur viser Theta-output for den positive retning.
Figur 3. Theta-output for positiv retning Følgende figur viser Theta-output for den negative retning.
Følgende figur viser Theta-output for den negative retning.
Figur 4. Theta-output for negativ retning
Oversigt (Stil et spørgsmål)
Følgende tabel giver en oversigt over encoder Interface IP-karakteristika.
| Kerneversion | Dette dokument gælder for Encoder Interface v4.2. |
| Understøttede enhedsfamilier | • PolarFire® SoC • PolarFire • RTG4™ • IGLOO® 2 • SmartFusion® 2 |
| Understøttet værktøjsflow | Kræver Libero® SoC v11.8 eller nyere udgivelser. |
| Licensering | Komplet krypteret RTL-kode leveres til kernen, hvilket gør det muligt at instansiere kernen med SmartDesign. Simulering, syntese og layout kan udføres med Libero-software. Encoder Interface er licenseret med krypteret RTL, der skal købes separat. For mere information, se Encoder interface. |
Funktioner (Stil et spørgsmål)
Encoder Interface har følgende nøglefunktioner:
- Beregner den relative vinkelposition
- Beregner den filtrerede hastighedsoutput
Implementering af IP Core i Libero Design Suite (Stil et spørgsmål)
IP-kerne skal installeres i IP-kataloget for Libero® SoC-softwaren. Dette gøres automatisk via IP Catalog update-funktionen i Libero SoC-softwaren, eller IP-kernen kan downloades manuelt fra kataloget.
Når IP-kernen er installeret i Libero SoC-softwarens IP-katalog, kan kernen konfigureres, genereres og instansieres i SmartDesign-værktøjet til medtagelse i Libero-projektlisten.
Enhedsudnyttelse og ydeevne (Stil et spørgsmål)
Følgende tabel viser den enhedsanvendelse, der bruges til Encoder Interface.
Tabel 1. Encoder Interface-udnyttelse
| Enhedsdetaljer | Ressourcer | Ydeevne (MHz) | RAM'er | Matematikblokke | Chip Globals | |||
| Familie | Enhed | LUT'er | DFF | LSRAM | μSRAM | |||
| PolarFire® SoC | MPFS250T | 398 | 285 | 200 | 0 | 0 | 2 | 0 |
| PolarFire | MPF300T | 387 | 285 | 200 | 0 | 0 | 2 | 0 |
| SmartFusion® 2 | M2S150 | 400 | 285 | 140 | 0 | 0 | 2 | 0 |
![]() Vigtig:
Vigtig:
- Dataene i denne tabel er fanget ved hjælp af typiske syntese- og layoutindstillinger. CDR-referenceurkilden blev indstillet til Dedikeret med andre konfiguratorværdier uændrede.
- Uret er begrænset til 200 MHz, mens du kører timinganalysen for at opnå præstationstallene.
Funktionsbeskrivelse
(Stil et spørgsmål)
Den følgende figur viser blokdiagrammet for encoder-interface.
Figur 1-1. Blokdiagram på systemniveau for indkodergrænseflade
Encoder-grænsefladeblokken konverterer signaler modtaget fra QA, QB til dens tilsvarende vinkel og hastighed. Blokken tæller encoder-kanter, indtil angle_count_max_i-værdien er opnået, og begynder derefter at tælle fra nul igen. Den genererede vinkel skaleres til 262144 ved at gange den med angle_factor_i. Hastighed måles ved at tælle antallet af indkoderhændelser i en konstant tidsperiode defineret af speed_window_i input. Et filter bruges til at filtrere kvantiseringsstøjen fra hastighedsmåling. Filtertidskonstanten kan konfigureres ved hjælp af filter_factor_i-værdien ved hjælp af følgende ligning:
Filtertidskonstant = Tidsrum mellem successive impulser af pwm midmatch _ i × 2 filter_factor_i
Sensor_reset_i-indgangen bruges til at finde motorens elektriske vinkel ved at indsprøjte konstant strøm i en kort periode.
Når motoren er justeret til den indsprøjtede vinkel, initialiseres encoderudgangen med 90° eller 270° baseret på den oprindelige rotationsretning. Encoderkanttællingen forventes at starte, efter at den faldende flanke af sensor_reset_i-indgangen er detekteret.
Indgangen clear_buffer_i kan bruges til at nulstille filterbufferen, da filterbufferen forventes at blive nulstillet, når motoren stopper.
Indgangen direction_config_i bruges til indledningsvis at detektere motorretningen. Når motoren begynder at køre, detekteres motorretningen fra encodersignalerne og bruges til at generere vinklen.
Encoder-grænsefladeparametre og grænsefladesignaler
(Stil et spørgsmål)
Dette afsnit diskuterer parametrene i Encoder Interface GUI-konfiguratoren og I/O-signaler.
2.1 Ind- og udgangssignaler (Stil et spørgsmål)
Følgende tabel viser indgangs- og udgangsportene for Encoder Interface.
| Signal navn | Retning | Beskrivelse |
| reset_i | Input | Aktivt lavt asynkront nulstillingssignal |
| sys_clk_i | Input | Systemur |
| fil_trig_i | Input | Filter trigger input. En timingimpuls på én urcyklusbredde skal tilføres ved denne indgang. Pulsens periodicitet bestemmer samplange tid. |
| direction_config_i | Input | Retningskonfigurationsbit – bruges på kalibreringstidspunktet til at justere rotoren. Når 1, justerer rotoren til start mod uret, eller når 0, justerer rotoren til start med uret. |
| clear_buffer_i | Input | Rydder filterbufferen generelt, når motoren er stoppet. Der skal indlæses en impuls på én urcyklusbredde, hver gang motoren stopper. |
| sensor_reset_i | Input | Sensor nulstillingssignal: Når den er indstillet til 1, nulstilles rotorvinklen til det, der svarer til 90° eller 270° som bestemt af direction_config_i-inputtet. Når indstillet til 0 (nul), normal drift. |
| qa_i | Input | Encoder-indgang A |
| qb_i | Input | Encoderindgang B |
| speed_factor_i | Input | Hastighedsudgangsskaleringsmultiplikator |
| vinkel_faktor_i | Input | Vinkeludgangsskaleringsmultiplikator |
| angle_count_max_i | Input | Maksimal vinkeltællingsværdi i form af encoder pulshændelser. |
| speed_window_i | Input | Tidsvinduet for hastighedsberegning, angivet i multipla af 10 µs. Større tidsvindue giver bedre hastighedsopløsning, men har højere latenstid. Mindre tidsvindue skal bruges til høj dynamisk hastighedsrespons. |
| filter_factor_i | Input | Filterfaktorværdi for filter – hvis værdien er n, er filtertidskonstanten 2^n gange sampling-tid for filteret defineret af filt_trig_i. |
| dir_o | Produktion | Retningssignal genereret baseret på encoder-indgangssignaler. |
| speed_done_o | Produktion | Indikerer hastighedsberegning er klar til filtrering (ved slutningen af hastighedsvinduet). En impuls på én sys_clk_i cyklusbredde genereres. |
| speed_filter_done_o | Produktion | Indikerer hastighedsoutput efter filtrering er gyldig (ved omega_out_o udgangsport). En impuls på én sys_clk_i cyklusbredde genereres. |
| omega_out_o | Produktion | Rotorhastighedsudgang efter filtrering – velegnet til brug som hastighedsfeedback i hastighedsreguleringsdrift. |
| vinkel_ud_o | Produktion | Elektrisk vinkeludgang egnet til FOC. |
| linje_antal_o | Produktion | Specificerer rotorpositionen i form af antal encoderlinjer (inkrementer) siden sidste sensornulstilling. Velegnet til brug med positionskontroloperationer. |
Tidsdiagrammer
(Stil et spørgsmål)
Dette afsnit diskuterer encoder interface timing diagram.
Den følgende figur viser tidsdiagrammet for encoder-interface.
Figur 3-1. Encoder Interface Timing Diagram
Testbænk
(Stil et spørgsmål)
En samlet testbench bruges til at verificere og teste Encoder Interface kaldet brugertestbench. Testbench leveres til at kontrollere funktionaliteten af Encoder Interface IP.
4.1 Simulering (Stil et spørgsmål)
De følgende trin beskriver, hvordan man simulerer kernen ved hjælp af testbænken:
- Åbn Libero SoC, klik på fanen Katalog, og klik derefter på Solutions-MotorControl.
- Dobbeltklik på Encoder Interface, og klik derefter på OK. Den dokumentation, der er knyttet til IP'en, er angivet under Dokumentation.
 Vigtig: Hvis du ikke kan se fanen Katalog, skal du klikke View, åbn Windows-menuen, og klik derefter på Katalog for at gøre det synligt.
Vigtig: Hvis du ikke kan se fanen Katalog, skal du klikke View, åbn Windows-menuen, og klik derefter på Katalog for at gøre det synligt.
Figur 4-1. Encoder Interface IP Core i Libero SoC Catalog
- På fanen Stimulus Hierarchy skal du klikke på testbench (encoder_interface_tb.v), pege på Simulate PreSynth Design, og derefter klikke på Open Interactively.
![]() Vigtig: Hvis du ikke kan se fanen Stimulushierarki, skal du klikke View, åbn Windows-menuen, og klik derefter på Stimulus Hierarchy for at gøre det synligt.
Vigtig: Hvis du ikke kan se fanen Stimulushierarki, skal du klikke View, åbn Windows-menuen, og klik derefter på Stimulus Hierarchy for at gøre det synligt.
Figur 4-2. Simulering af præsyntesedesign
ModelSim åbner med testbænken file som vist i den følgende figur.
Figur 4-3. ModelSim Simuleringsvindue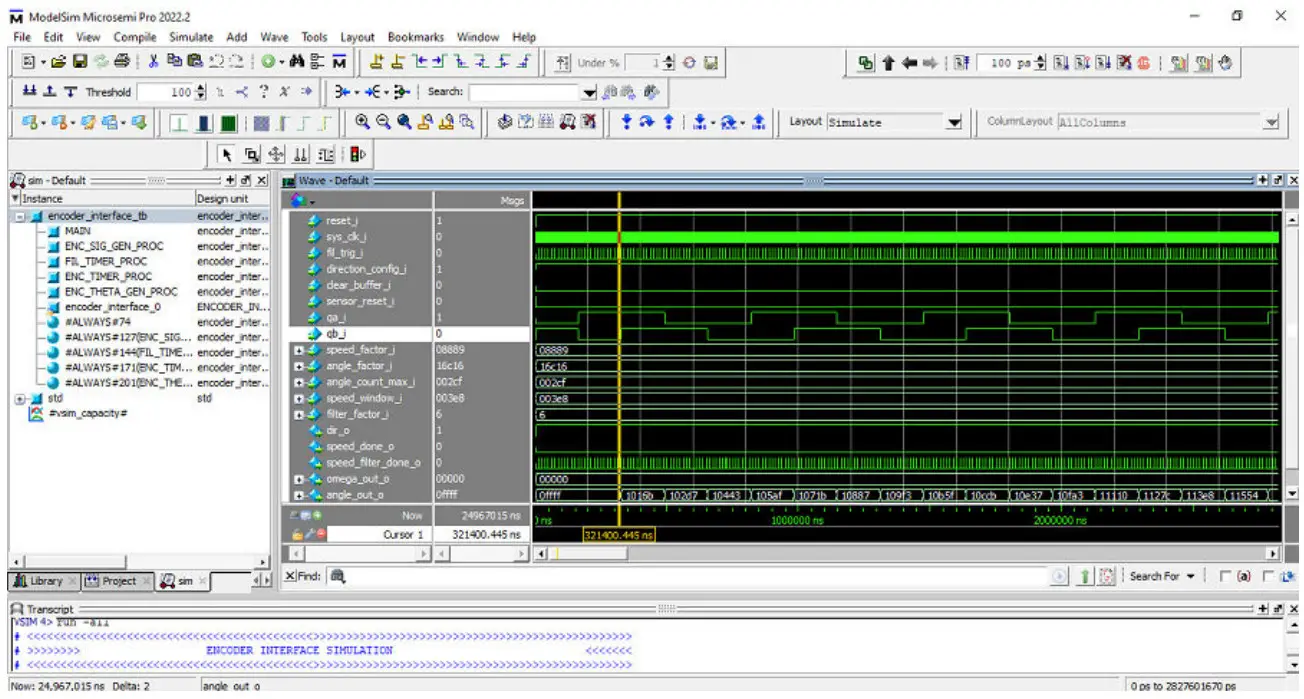
![]() Vigtig: Hvis simuleringen afbrydes på grund af køretidsgrænsen angivet i .do file, brug kommandoen run -all for at fuldføre simuleringen.
Vigtig: Hvis simuleringen afbrydes på grund af køretidsgrænsen angivet i .do file, brug kommandoen run -all for at fuldføre simuleringen.
Revisionshistorie
(Stil et spørgsmål)
Revisionshistorikken beskriver de ændringer, der blev implementeret i dokumentet. Ændringerne er listet efter revision, startende med den seneste publikation.
Tabel 5-1. Revisionshistorik
| Revision | Dato | Beskrivelse |
| A | 03/2023 | Følgende er listen over ændringer i revision A af dokumentet: • Migrerede dokumentet til Microchip-skabelonen. • Opdaterede dokumentnummeret til DS00004913A fra 50200659. • Tilføjet 3. Tidsdiagrammer. • Tilføjet 4. Testbænk. |
| 3.0 | — | Følgende er en oversigt over ændringer, der er foretaget i denne revision: • Tilføjet IP-versionen til dokumentets titel. • Tilføjet speed_done_o og speed_filter_done_o outputsignaler. • Fjernet afsnittet konfigurationsparameter fra hardwareimplementering. |
| 2.0 | — | Opdaterede dokumentet med de nye outputsignaler. |
| 1.0 | — | Revision 1.0 var den første udgivelse af dette dokument. |
Mikrochip FPGA-understøttelse
(Stil et spørgsmål)
Microchip FPGA-produktgruppen støtter sine produkter med forskellige supporttjenester, herunder kundeservice, teknisk kundesupportcenter, et webwebsted og verdensomspændende salgskontorer. Kunder foreslås at besøge Microchips onlineressourcer, før de kontakter support, da det er meget sandsynligt, at deres forespørgsler allerede er blevet besvaret.
Kontakt teknisk supportcenter via website kl www.microchip.com/support. Nævn FPGA-enhedens varenummer, vælg passende sagskategori, og upload design files, mens du opretter en teknisk supportsag.
Kontakt kundeservice for ikke-teknisk produktsupport, såsom produktpriser, produktopgraderinger, opdateringsoplysninger, ordrestatus og godkendelse.
- Fra Nordamerika, ring 800.262.1060
- Fra resten af verden, ring på 650.318.4460
- Fax, hvor som helst i verden, 650.318.8044
Mikrochip information
Mikrochippen Webwebsted (Stil et spørgsmål)
Microchip yder online support via vores website kl www.microchip.com/. Denne website bruges til at lave files og information let tilgængelig for kunderne. Noget af det tilgængelige indhold inkluderer:
- Produktsupport – Datablade og errata, ansøgningsnotater og sample-programmer, designressourcer, brugervejledninger og hardwaresupportdokumenter, seneste softwareudgivelser og arkiveret software
- Generel teknisk support – Ofte stillede spørgsmål (FAQ), anmodninger om teknisk support, online diskussionsgrupper, medlemsliste for Microchip-designpartnerprogram
- Microchips virksomhed – Produktvælger- og bestillingsvejledninger, seneste Microchip-pressemeddelelser, oversigt over seminarer og arrangementer, lister over Microchip salgskontorer, distributører og fabriksrepræsentanter
Produktændringsmeddelelsesservice (Stil et spørgsmål)
Microchips underretningstjeneste for produktændringer hjælper med at holde kunderne opdateret på Microchip-produkter. Abonnenter vil modtage e-mail-meddelelser, når der er ændringer, opdateringer, revisioner eller fejl relateret til en specificeret produktfamilie eller udviklingsværktøj af interesse.
For at registrere, gå til www.microchip.com/pcn og følg registreringsvejledningen.
Kundesupport (Stil et spørgsmål)
Brugere af Microchip-produkter kan modtage assistance gennem flere kanaler:
- Distributør eller repræsentant
- Lokalt salgskontor
- Embedded Solutions Engineer (ESE)
- Teknisk support
Kunder bør kontakte deres distributør, repræsentant eller ESE for at få support. Lokale salgskontorer er også tilgængelige for at hjælpe kunder. En liste over salgskontorer og lokationer er inkluderet i dette dokument.
Teknisk support er tilgængelig via webwebsted på: www.microchip.com/support
Mikrochip-enheder kodebeskyttelsesfunktion (Stil et spørgsmål)
Bemærk følgende detaljer om kodebeskyttelsesfunktionen på Microchip-produkter:
- Microchip-produkter opfylder specifikationerne i deres særlige Microchip-datablad.
- Microchip mener, at dens familie af produkter er sikre, når de bruges på den tilsigtede måde, inden for driftsspecifikationerne og under normale forhold.
- Microchip værdsætter og beskytter aggressivt sine intellektuelle ejendomsrettigheder. Forsøg på at bryde kodebeskyttelsesfunktionerne i Microchip-produktet er strengt forbudt og kan være i strid med Digital Millennium Copyright Act.
- Hverken Microchip eller nogen anden halvlederproducent kan garantere sikkerheden af deres kode. Kodebeskyttelse betyder ikke, at vi garanterer, at produktet er "ubrydeligt". Kodebeskyttelse er i konstant udvikling. Microchip er forpligtet til løbende at forbedre kodebeskyttelsesfunktionerne i vores produkter.
Juridisk meddelelse (Stil et spørgsmål)
Denne publikation og oplysningerne heri må kun bruges med Microchip-produkter, herunder til at designe, teste og integrere Microchip-produkter med din applikation. Brug af disse oplysninger på anden måde overtræder disse vilkår. Oplysninger om enhedsapplikationer gives kun for din bekvemmelighed og kan blive afløst af opdateringer. Det er dit ansvar at sikre, at din ansøgning lever op til dine specifikationer. Kontakt dit lokale Microchip salgskontor for yderligere support, eller få yderligere support på www.microchip.com/en-us/support/design-help/client-support-services.
DISSE OPLYSNINGER LEVERES AF MICROCHIP "SOM DE ER". MICROCHIP GIVER INGEN REPRÆSENTATIONER ELLER GARANTIER AF NOGEN ART, HVERKEN UDTRYKKELIGE ELLER UNDERFORSTÅEDE, SKRIFTLIGE ELLER mundtlige, LOVBESTEMMET ELLER ANDEN MÅDE, RELATET TIL OPLYSNINGERNE, INKLUSIVE MEN IKKE BEGRÆNSET TIL NOGEN STILTIENDE GARANTIER, GARANTIER OG GARANTIER. EGNETHED TIL ET BESTEMT FORMÅL ELLER GARANTIER RELATET TIL DETS TILSTAND, KVALITET ELLER YDELSE.
MICROCHIP VIL UNDER INGEN OMSTÆNDIGHEDER VÆRE ANSVARLIG FOR NOGEN INDIREKTE, SÆRLIGE, STRAFFENDE, TILFÆLDELIGE ELLER FØLGETAB, SKADER, OMKOSTNINGER ELLER UDGIFTER AF NOGEN ART, SOM ER RELATET TIL OPLYSNINGERNE ELLER DERES ANVENDELSE, UNDER ANDET ELLER ARGANG. MULIGHEDEN ELLER SKADERNE ER FORUDSIGELIGE. I DET FULDSTÆNDE OMFANG, DET ER TILLADT AF LOVEN, VIL MICROCHIPS SAMLEDE ANSVAR PÅ ALLE KRAV PÅ NOGEN MÅDE RELATET TIL INFORMATIONEN ELLER DERES ANVENDELSE IKKE OVERstige BELØBET, HVIS NOGET, SOM DU HAR BETALT DIREKTE TIL MICRATIONOCHIP.
Brug af Microchip-enheder i livsstøtte- og/eller sikkerhedsapplikationer er helt på købers risiko, og køberen indvilliger i at forsvare, skadesløsholde og holde Microchip skadesløs fra enhver skade, krav, sager eller udgifter som følge af sådan brug. Ingen licenser videregives, implicit eller på anden måde, under nogen af Microchips intellektuelle ejendomsrettigheder, medmindre andet er angivet.
Varemærker (Stil et spørgsmål)
Mikrochipnavnet og logoet, mikrochiplogoet, Adaptec, AVR, AVR-logoet, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, Microsemi logo, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom , SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron og XMEGA er registrerede varemærker tilhørende Microchip Technology Incorporated i USA og andre lande.
AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, ProASIC Plus logo, Quiet-Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime og ZL er registrerede varemærker tilhørende Microchip Technology Incorporated i USA
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average Matching. , DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, In-Circuit Serial Programmering, ICSP, INICnet, Intelligent Paralleling, IntelliMOS, Inter-Chip Connectivity, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, . , RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-IS, storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect og ZENA er varemærker tilhørende Microchip Technology Incorporated i USA og andre lande.
SQTP er et servicemærke tilhørende Microchip Technology Incorporated i USA
Adaptec-logoet, Frequency on Demand, Silicon Storage Technology og Symmcom er registrerede varemærker tilhørende Microchip Technology Inc. i andre lande.
GestIC er et registreret varemærke tilhørende Microchip Technology Germany II GmbH & Co. KG, et datterselskab af Microchip Technology Inc., i andre lande.
Alle andre varemærker nævnt heri tilhører deres respektive virksomheder.
©2023, Microchip Technology Incorporated og dets datterselskaber. Alle rettigheder forbeholdes.
ISBN: 978-1-6683-2164-5
Kvalitetsstyringssystem (Stil et spørgsmål)
For information om Microchips kvalitetsstyringssystemer, besøg venligst www.microchip.com/quality.
Verdensomspændende salg og service
| AMERIKA | ASIEN/PACIFIK | ASIEN/PACIFIK | EUROPA |
| Virksomhedskontor 2355 West Chandler Blvd. Chandler, AZ 85224-6199 Tlf.: 480-792-7200 Fax: 480-792-7277 Teknisk support: www.microchip.com/support Web Adresse: www.microchip.com Atlanta Duluth, GA Tlf.: 678-957-9614 Fax: 678-957-1455 Austin, TX Tlf.: 512-257-3370 Boston Westborough, MA Tlf.: 774-760-0087 Fax: 774-760-0088 Chicago Itasca, IL Tlf.: 630-285-0071 Fax: 630-285-0075 Dallas Addison, TX Tlf.: 972-818-7423 Fax: 972-818-2924 Detroit Novi, MI Tlf.: 248-848-4000 Houston, TX Tlf.: 281-894-5983 Indianapolis Noblesville, IN Tlf.: 317-773-8323 Fax: 317-773-5453 Tlf.: 317-536-2380 Los Angeles Mission Viejo, CA Tlf.: 949-462-9523 Fax: 949-462-9608 Tlf.: 951-273-7800 Raleigh, NC Tlf.: 919-844-7510 New York, NY Tlf.: 631-435-6000 San Jose, CA Tlf.: 408-735-9110 Tlf.: 408-436-4270 Canada – Toronto Tlf.: 905-695-1980 Fax: 905-695-2078 |
Australien – Sydney Tlf.: 61-2-9868-6733 Kina – Beijing Tlf.: 86-10-8569-7000 Kina – Chengdu Tlf.: 86-28-8665-5511 Kina – Chongqing Tlf.: 86-23-8980-9588 Kina – Dongguan Tlf.: 86-769-8702-9880 Kina – Guangzhou Tlf.: 86-20-8755-8029 Kina – Hangzhou Tlf.: 86-571-8792-8115 Kina – Hong Kong SAR Tlf.: 852-2943-5100 Kina – Nanjing Tlf.: 86-25-8473-2460 Kina – Qingdao Tlf.: 86-532-8502-7355 Kina – Shanghai Tlf.: 86-21-3326-8000 Kina – Shenyang Tlf.: 86-24-2334-2829 Kina – Shenzhen Tlf.: 86-755-8864-2200 Kina – Suzhou Tlf.: 86-186-6233-1526 Kina – Wuhan Tlf.: 86-27-5980-5300 Kina – Xian Tlf.: 86-29-8833-7252 Kina – Xiamen Tlf.: 86-592-2388138 Kina – Zhuhai Tlf.: 86-756-3210040 |
Indien – Bangalore Tlf.: 91-80-3090-4444 Indien – New Delhi Tlf.: 91-11-4160-8631 Indien - Pune Tlf.: 91-20-4121-0141 Japan – Osaka Tlf.: 81-6-6152-7160 Japan – Tokyo Tlf.: 81-3-6880- 3770 Korea – Daegu Tlf.: 82-53-744-4301 Korea – Seoul Tlf.: 82-2-554-7200 Malaysia - Kuala Lumpur Tlf.: 60-3-7651-7906 Malaysia – Penang Tlf.: 60-4-227-8870 Filippinerne – Manila Tlf.: 63-2-634-9065 Singapore Tlf.: 65-6334-8870 Taiwan – Hsin Chu Tlf.: 886-3-577-8366 Taiwan – Kaohsiung Tlf.: 886-7-213-7830 Taiwan - Taipei Tlf.: 886-2-2508-8600 Thailand – Bangkok Tlf.: 66-2-694-1351 Vietnam – Ho Chi Minh Tlf.: 84-28-5448-2100 |
Østrig – Wels Tlf.: 43-7242-2244-39 Fax: 43-7242-2244-393 Danmark – København Tlf.: 45-4485-5910 Fax: 45-4485-2829 Finland – Espoo Tlf.: 358-9-4520-820 Frankrig – Paris Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79 Tyskland – Garching Tlf.: 49-8931-9700 Tyskland – Haan Tlf.: 49-2129-3766400 Tyskland – Heilbronn Tlf.: 49-7131-72400 Tyskland – Karlsruhe Tlf.: 49-721-625370 Tyskland – München Tel: 49-89-627-144-0 Fax: 49-89-627-144-44 Tyskland – Rosenheim Tlf.: 49-8031-354-560 Israel – Ra'anana Tlf.: 972-9-744-7705 Italien – Milano Tlf.: 39-0331-742611 Fax: 39-0331-466781 Italien – Padova Tlf.: 39-049-7625286 Holland – Drunen Tlf.: 31-416-690399 Fax: 31-416-690340 Norge – Trondheim Tlf.: 47-72884388 Polen – Warszawa Tlf.: 48-22-3325737 Rumænien – Bukarest Tel: 40-21-407-87-50 Spanien - Madrid Tel: 34-91-708-08-90 Fax: 34-91-708-08-91 Sverige – Göteborg Tel: 46-31-704-60-40 Sverige – Stockholm Tlf.: 46-8-5090-4654 Storbritannien – Wokingham Tlf.: 44-118-921-5800 Fax: 44-118-921-5820 |
© 2023 Microchip Technology Inc.
og dets datterselskaber
DS00004913A
Dokumenter/ressourcer
 |
MICROCHIP v4.2 Encoder Interface [pdfBrugervejledning v4.2 Encoder Interface, v4.2, Encoder Interface, Interface |