![]() Interface d'encodeur v4.2
Interface d'encodeur v4.2
Guide de l'utilisateur
Introduction
(Poser une question)
L'encodeur incrémental est le capteur le plus couramment utilisé pour le contrôle orienté champ (FOC) du courant continu sans balais à aimant permanent (BLDC) ou du moteur synchrone à aimant permanent (PMSM). Ce capteur donne la position angulaire relative en sortie sous forme d'impulsions. Un codeur en quadrature produit généralement deux sorties dont les impulsions sont déphasées de 90°, comme le montre la figure 1. Le déphasage entre les deux signaux A et B représente le sens de rotation. La logique de l'interface du codeur utilise la détection des fronts montants et descendants de A et B, comme le montre la figure 2. Cela donne une résolution quatre fois supérieure à la résolution du codeur et produit une très haute résolution à partir d'un codeur à faible coût.
La figure suivante montre les signaux du codeur dans le sens des aiguilles d'une montre et dans le sens inverse.
Figure 1. Signaux du codeur dans le sens des aiguilles d'une montre et dans le sens inverse des aiguilles d'une montre La figure suivante montre la détection des fronts des impulsions du codeur pour une résolution plus élevée.
La figure suivante montre la détection des fronts des impulsions du codeur pour une résolution plus élevée.
Figure 2. Détection de bord des impulsions du codeur pour une résolution plus élevée Après la détection des bords, des compteurs sont utilisés pour obtenir une position angulaire du rotor en termes d'angle électrique afin qu'il puisse être directement utilisé pour le FOC. La valeur Angle_count_max représente le nombre total de bords qui seront détectés lors d'une rotation mécanique du rotor. La sortie d'angle va de 0 à 262143, où 262143 représente 360°. La variation de l'angle de sortie par rapport aux bords est représentée sur la figure 3 pour la vitesse positive et sur la figure 4 pour la vitesse négative. La vitesse de sortie est calculée en fonction du taux de changement de position angulaire.
Après la détection des bords, des compteurs sont utilisés pour obtenir une position angulaire du rotor en termes d'angle électrique afin qu'il puisse être directement utilisé pour le FOC. La valeur Angle_count_max représente le nombre total de bords qui seront détectés lors d'une rotation mécanique du rotor. La sortie d'angle va de 0 à 262143, où 262143 représente 360°. La variation de l'angle de sortie par rapport aux bords est représentée sur la figure 3 pour la vitesse positive et sur la figure 4 pour la vitesse négative. La vitesse de sortie est calculée en fonction du taux de changement de position angulaire.
Trois paramètres permettent de configurer l'interface du codeur :
La figure suivante montre la sortie Theta pour le sens positif.
Figure 3. Sortie thêta pour la direction positive La figure suivante montre la sortie Theta pour la direction négative.
La figure suivante montre la sortie Theta pour la direction négative.
Figure 4. Sortie thêta pour la direction négative
Résumé (Poser une question)
Le tableau suivant fournit un résumé des caractéristiques IP de l'interface du codeur.
| Version de base | Ce document s'applique à l'interface d'encodeur v4.2. |
| Familles d'appareils pris en charge | • SoC PolarFire® • PolarFire • RTG4™ • IGLOO®2 • SmartFusion® 2 |
| Flux d'outils pris en charge | Nécessite Libero® SoC v11.8 ou versions ultérieures. |
| Licences | Un code RTL crypté complet est fourni pour le noyau, permettant au noyau d'être instancié avec SmartDesign. La simulation, la synthèse et la mise en page peuvent être réalisées avec le logiciel Libero. Encoder Interface est sous licence avec RTL crypté qui doit être acheté séparément. Pour plus d'informations, voir Interface d'encodeur. |
Caractéristiques (Poser une question)
L'interface de l'encodeur présente les fonctionnalités clés suivantes :
- Calcule la position angulaire relative
- Calcule la sortie de vitesse filtrée
Implémentation d'IP Core dans Libero Design Suite (Poser une question)
Le noyau IP doit être installé dans le catalogue IP du logiciel Libero® SoC. Cela se fait automatiquement via la fonction de mise à jour du catalogue IP dans le logiciel Libero SoC, ou le noyau IP peut être téléchargé manuellement à partir du catalogue.
Une fois le cœur IP installé dans le catalogue IP du logiciel Libero SoC, le cœur peut être configuré, généré et instancié dans l'outil SmartDesign pour être inclus dans la liste des projets Libero.
Utilisation et performances des appareils (Poser une question)
Le tableau suivant répertorie l'utilisation du périphérique utilisé pour l'interface d'encodeur.
Tableau 1. Utilisation de l'interface du codeur
| Détails de l'appareil | Ressources | Performances (MHz) | RAM | Blocs mathématiques | puces globales | |||
| Famille | Appareil | LUT | DFF | LSRAM | µSRAM | |||
| SoC PolarFire® | MPFS250T | 398 | 285 | 200 | 0 | 0 | 2 | 0 |
| Feu polaire | MPF300T | 387 | 285 | 200 | 0 | 0 | 2 | 0 |
| Smart Fusion® 2 | M2S150 | 400 | 285 | 140 | 0 | 0 | 2 | 0 |
![]() Important:
Important:
- Les données de ce tableau sont capturées à l'aide de paramètres de synthèse et de mise en page typiques. La source d'horloge de référence CDR a été définie sur Dédié avec les autres valeurs du configurateur inchangées.
- L'horloge est limitée à 200 MHz lors de l'exécution de l'analyse temporelle pour atteindre les performances.
Description fonctionnelle
(Poser une question)
La figure suivante montre le schéma fonctionnel de l'interface du codeur.
Figure 1-1. Schéma fonctionnel au niveau du système de l'interface du codeur
Le bloc d'interface du codeur convertit les signaux reçus de QA, QB en l'angle et la vitesse correspondants. Le bloc compte les bords de l'encodeur jusqu'à ce que la valeur angle_count_max_i soit atteinte, puis recommence à compter à partir de zéro. L'angle généré est mis à l'échelle à 262144 en le multipliant par angle_factor_i. La vitesse est mesurée en comptant le nombre d'événements d'encodeur sur une période de temps constante définie par l'entrée speed_window_i. Un filtre est utilisé pour filtrer le bruit de quantification provenant de la mesure de vitesse. La constante de temps du filtre peut être configurée à l'aide de la valeur filter_factor_i à l'aide de l'équation suivante :
Constante de temps du filtre = Période de temps entre les impulsions successives du midmatch pwm _ i × 2 filter_factor_i
L'entrée sensor_reset_i est utilisée pour trouver l'angle électrique du moteur en injectant un courant constant pendant une courte durée.
Lorsque le moteur s'est aligné sur l'angle injecté, la sortie du codeur est initialisée à 90° ou 270° en fonction du sens de rotation initial. Le comptage des fronts du codeur devrait démarrer après la détection du front descendant de l'entrée sensor_reset_i.
L'entrée clear_buffer_i peut être utilisée pour réinitialiser le tampon du filtre, car le tampon du filtre est censé être réinitialisé lorsque le moteur s'arrête.
L'entrée direction_config_i est utilisée pour détecter initialement la direction du moteur. Une fois que le moteur démarre, la direction du moteur est détectée à partir des signaux du codeur et utilisée pour générer l'angle.
Paramètres d'interface du codeur et signaux d'interface
(Poser une question)
Cette section traite des paramètres du configurateur GUI de l'interface du codeur et des signaux d'E/S.
2.1 Signaux d'entrées et de sorties (Poser une question)
Le tableau suivant répertorie les ports d'entrée et de sortie de l'interface d'encodeur.
| Nom du signal | Direction | Description |
| réinitialiser_i | Saisir | Signal de réinitialisation asynchrone faible actif |
| sys_clk_i | Saisir | Horloge système |
| fil_trig_i | Saisir | Entrée de déclenchement du filtre. Une impulsion de synchronisation d'une largeur de cycle d'horloge doit être fournie à cette entrée. La périodicité de l'impulsion détermine le samptemps long. |
| direction_config_i | Saisir | Bit de configuration de direction – utilisé au moment de l’étalonnage pour aligner le rotor. Lorsque 1, aligne le rotor pour un démarrage dans le sens inverse des aiguilles d'une montre ou lorsque 0, aligne le rotor pour un démarrage dans le sens des aiguilles d'une montre. |
| clear_buffer_i | Saisir | Efface généralement le tampon du filtre lorsque le moteur est arrêté. Une impulsion d’une largeur de cycle d’horloge doit être entrée à chaque fois que le moteur s’arrête. |
| sensor_reset_i | Saisir | Signal de réinitialisation du capteur : Lorsqu'il est défini sur 1, l'angle du rotor est réinitialisé à l'équivalent de 90° ou 270°, comme déterminé par l'entrée direction_config_i. Lorsqu'il est réglé sur 0 (zéro), fonctionnement normal. |
| qa_i | Saisir | Entrée codeur A |
| qb_i | Saisir | Entrée codeur B |
| speed_factor_i | Saisir | Multiplicateur de mise à l'échelle de sortie de vitesse |
| angle_factor_i | Saisir | Multiplicateur de mise à l'échelle de sortie d'angle |
| angle_count_max_i | Saisir | Valeur maximale du nombre d'angles en termes d'événements d'impulsions du codeur. |
| speed_window_i | Saisir | La fenêtre temporelle pour le calcul de la vitesse, spécifiée en multiples de 10 µs. Une fenêtre de temps plus grande donne une meilleure résolution de vitesse mais une latence plus élevée. Une fenêtre de temps plus petite doit être utilisée pour une réponse à vitesse dynamique élevée. |
| filtre_factor_i | Saisir | Valeur du facteur de filtre pour le filtre – si la valeur est n, la constante de temps du filtre est 2 ^ n fois le samptemps de maintien du filtre défini par filt_trig_i. |
| dir_o | Sortir | Signal de direction généré sur la base des signaux d’entrée du codeur. |
| speed_done_o | Sortir | Indique que le calcul de la vitesse est prêt pour le filtrage (à la fin de la fenêtre de vitesse). Une impulsion d'une largeur de cycle sys_clk_i est générée. |
| speed_filter_done_o | Sortir | Indique que la sortie de vitesse après le filtrage est valide (au port de sortie omega_out_o). Une impulsion d'une largeur de cycle sys_clk_i est générée. |
| omega_out_o | Sortir | Sortie de vitesse du rotor après filtrage – convient pour une utilisation comme retour de vitesse dans le fonctionnement du contrôle de vitesse. |
| angle_out_o | Sortir | Sortie d'angle électrique adaptée au FOC. |
| line_count_o | Sortir | Spécifie la position du rotor en termes de nombre de lignes d'encodeur (incréments) depuis la dernière réinitialisation du capteur. Convient pour une utilisation avec des opérations de contrôle de position. |
Diagrammes de synchronisation
(Poser une question)
Cette section traite du chronogramme de l'interface du codeur.
La figure suivante montre le chronogramme de l'interface du codeur.
Figure 3-1. Diagramme de synchronisation de l'interface du codeur
Banc d'essai
(Poser une question)
Un banc de test unifié est utilisé pour vérifier et tester l'interface de l'encodeur appelée banc de test utilisateur. Testbench est fourni pour vérifier la fonctionnalité de l’IP de l’interface de l’encodeur.
Simulation 4.1 (Poser une question)
Les étapes suivantes décrivent comment simuler le cœur à l'aide du testbench :
- Ouvrez Libero SoC, cliquez sur l'onglet Catalogue, puis cliquez sur Solutions-MotorControl.
- Double-cliquez sur Encoder Interface, puis cliquez sur OK. La documentation associée à l'IP est répertoriée sous Documentation.
 Important: Si vous ne voyez pas l'onglet Catalogue, cliquez sur View, ouvrez le menu Windows, puis cliquez sur Catalogue pour le rendre visible.
Important: Si vous ne voyez pas l'onglet Catalogue, cliquez sur View, ouvrez le menu Windows, puis cliquez sur Catalogue pour le rendre visible.
Figure 4-1. Noyau IP de l'interface d'encodeur dans le catalogue Libero SoC
- Dans l’onglet Hiérarchie de stimulus, cliquez sur le banc de test ( encoder_interface_tb.v), pointez sur Simuler la conception pré-synth, puis cliquez sur Ouvrir de manière interactive.
![]() Important: Si vous ne voyez pas l'onglet Hiérarchie des stimulus, cliquez sur View, ouvrez le menu Windows, puis cliquez sur Hiérarchie des stimulus pour la rendre visible.
Important: Si vous ne voyez pas l'onglet Hiérarchie des stimulus, cliquez sur View, ouvrez le menu Windows, puis cliquez sur Hiérarchie des stimulus pour la rendre visible.
Illustration 4-2. Simulation de conception de pré-synthèse
ModelSim s'ouvre avec le testbench file comme le montre la figure suivante.
Illustration 4-3. Fenêtre de simulation ModelSim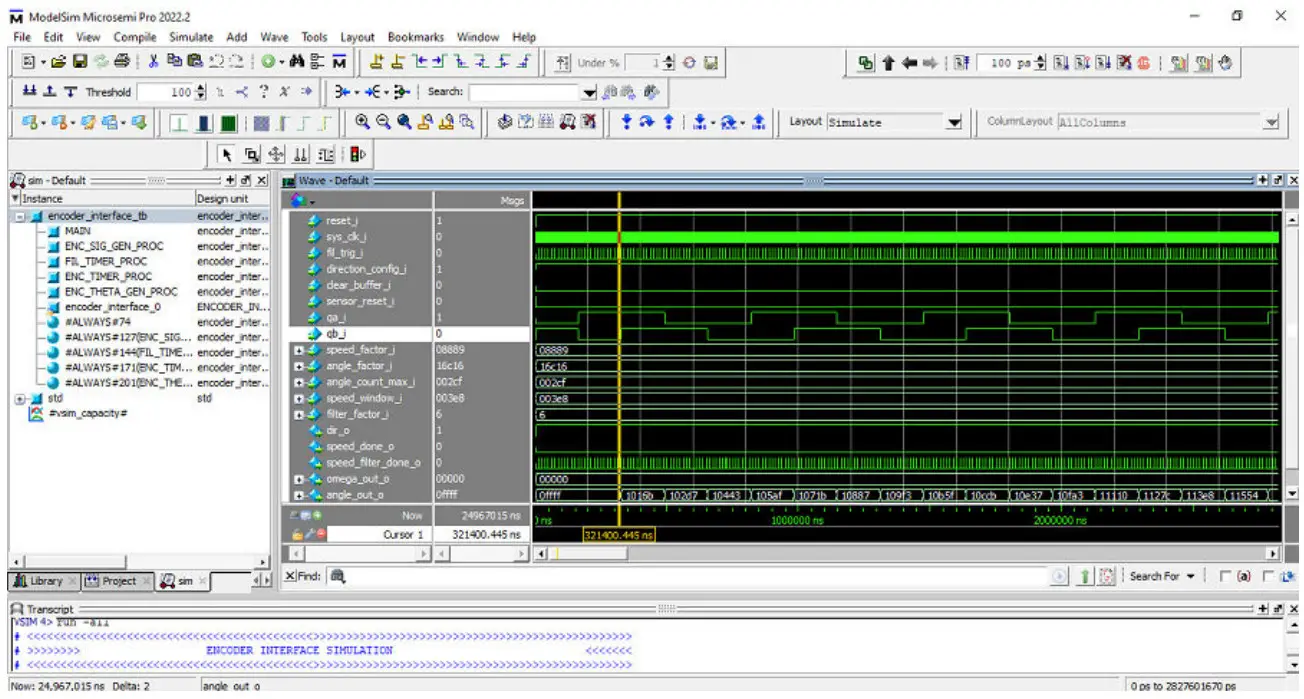
![]() Important: Si la simulation est interrompue en raison de la limite d'exécution spécifiée dans le .do file, utilisez la commande run -all pour terminer la simulation.
Important: Si la simulation est interrompue en raison de la limite d'exécution spécifiée dans le .do file, utilisez la commande run -all pour terminer la simulation.
Historique des révisions
(Poser une question)
L'historique des révisions décrit les modifications apportées au document. Les modifications sont répertoriées par révision, en commençant par la publication la plus récente.
Tableau 5-1. Historique des révisions
| Révision | Date | Description |
| A | 03/2023 | Voici la liste des modifications apportées à la révision A du document : • Migration du document vers le modèle Microchip. • Mise à jour du numéro de document de 00004913 à DS50200659A. • Ajoutée 3. Chronogrammes. • Ajoutée 4. Banc d'essai. |
| 3.0 | — | Ce qui suit est un résumé des modifications apportées dans cette révision : • Ajout de la version IP au titre du document. • Ajout des signaux de sortie speed_done_o et speed_filter_done_o. • Suppression de la section Paramètres de configuration de l'implémentation matérielle. |
| 2.0 | — | Mise à jour du document avec les nouveaux signaux de sortie. |
| 1.0 | — | La révision 1.0 a été la première publication de ce document. |
Prise en charge des micropuces FPGA
(Poser une question)
Le groupe de produits Microchip FPGA soutient ses produits avec divers services de support, y compris le service client, le centre de support technique client, un website et des bureaux de vente dans le monde entier. Les clients sont invités à consulter les ressources en ligne de Microchip avant de contacter l'assistance, car il est très probable que leurs questions aient déjà reçu une réponse.
Contactez le centre d'assistance technique via le website à www.microchip.com/support. Mentionnez le numéro de pièce de l'appareil FPGA, sélectionnez la catégorie de cas appropriée et téléchargez la conception files lors de la création d'un dossier de support technique.
Contactez le service client pour une assistance produit non technique, telle que la tarification des produits, les mises à niveau des produits, les informations de mise à jour, le statut de la commande et l'autorisation.
- Depuis l'Amérique du Nord, appelez le 800.262.1060
- Depuis le reste du monde, appelez le 650.318.4460
- Fax, de n'importe où dans le monde, 650.318.8044
Informations sur la puce
La micropuce Website (Poser une question)
Microchip fournit une assistance en ligne via notre website à www.microchip.com/. Ce weble site est utilisé pour faire files et informations facilement accessibles aux clients. Voici quelques-uns des contenus disponibles :
- Assistance produit – Fiches techniques et errata, notes d'application et samples programmes, les ressources de conception, les guides d'utilisation et les documents de support matériel, les dernières versions de logiciels et les logiciels archivés
- Assistance technique générale - Foire aux questions (FAQ), demandes d'assistance technique, groupes de discussion en ligne, liste des membres du programme de partenariat de conception Microchip
- Activité de Microchip - Guides de sélection et de commande de produits, derniers communiqués de presse de Microchip, liste des séminaires et événements, listes des bureaux de vente, des distributeurs et des représentants d'usine de Microchip
Service de notification de changement de produit (Poser une question)
Le service de notification de changement de produit de Microchip aide les clients à rester informés sur les produits Microchip. Les abonnés recevront une notification par e-mail chaque fois qu'il y aura des changements, des mises à jour, des révisions ou des errata liés à une famille de produits ou à un outil de développement spécifique.
Pour vous inscrire, rendez-vous sur www.microchip.com/pcn et suivez les instructions d'inscription.
Assistance clientèle (Poser une question)
Les utilisateurs de produits Microchip peuvent recevoir de l'aide via plusieurs canaux :
- Distributeur ou représentant
- Bureau de vente local
- Ingénieur Solutions Embarquées (ESE)
- Assistance technique
Les clients doivent contacter leur distributeur, leur représentant ou ESE pour obtenir de l'aide. Des bureaux de vente locaux sont également disponibles pour aider les clients. Une liste des bureaux de vente et des emplacements est incluse dans ce document.
Le support technique est disponible via le website à: www.microchip.com/support
Fonction de protection du code des appareils Microchip (Poser une question)
Notez les détails suivants concernant la fonction de protection du code sur les produits Microchip :
- Les produits Microchip répondent aux spécifications contenues dans leur fiche technique Microchip particulière.
- Microchip estime que sa gamme de produits est sécurisée lorsqu'elle est utilisée de la manière prévue, dans le cadre des spécifications de fonctionnement et dans des conditions normales.
- Microchip valorise et protège agressivement ses droits de propriété intellectuelle. Les tentatives de violation des fonctions de protection du code du produit Microchip sont strictement interdites et peuvent enfreindre le Digital Millennium Copyright Act.
- Ni Microchip ni aucun autre fabricant de semi-conducteurs ne peut garantir la sécurité de son code. La protection du code ne signifie pas que nous garantissons que le produit est « incassable ». La protection du code évolue constamment. Microchip s'engage à améliorer en permanence les fonctionnalités de protection du code de ses produits.
Mentions légales (Poser une question)
Cette publication et les informations qu'elle contient ne peuvent être utilisées qu'avec les produits Microchip, y compris pour concevoir, tester et intégrer les produits Microchip à votre application. L'utilisation de ces informations de toute autre manière viole ces conditions. Les informations concernant les applications de l'appareil sont fournies uniquement pour votre commodité et peuvent être remplacées par des mises à jour. Il est de votre responsabilité de vous assurer que votre application répond à vos spécifications. Contactez votre bureau de vente Microchip local pour une assistance supplémentaire ou obtenez une assistance supplémentaire sur www.microchip.com/en-us/support/design-help/client-support-services.
CES INFORMATIONS SONT FOURNIES PAR MICROCHIP « EN L'ÉTAT ». MICROCHIP NE FAIT AUCUNE DÉCLARATION OU GARANTIE D'AUCUNE SORTE, EXPLICITE OU IMPLICITE, ÉCRITE OU ORALE, LÉGALE OU AUTRE, CONCERNANT LES INFORMATIONS, Y COMPRIS, MAIS SANS S'Y LIMITER, TOUTE GARANTIE IMPLICITE DE NON-CONTREFAÇON, DE QUALITÉ MARCHANDE ET D'ADÉQUATION À UN USAGE PARTICULIER, OU TOUTE GARANTIE RELATIVE À SON ÉTAT, SA QUALITÉ OU SES PERFORMANCES.
EN AUCUN CAS MICROCHIP NE SERA RESPONSABLE DE TOUTE PERTE, DE TOUT DOMMAGE, DE TOUT COÛT OU DE TOUTE DÉPENSE INDIRECTE, SPÉCIALE, PUNITIF, ACCESSOIRE OU CONSÉCUTIF DE QUELQUE NATURE QUE CE SOIT LIÉ AUX INFORMATIONS OU À LEUR UTILISATION, QUELLE QU'EN SOIT LA CAUSE, MÊME SI MICROCHIP A ÉTÉ AVISÉ DE LA POSSIBILITÉ OU SI LES DOMMAGES SONT PRÉVISIBLES. DANS TOUTE LA MESURE PERMISE PAR LA LOI, LA RESPONSABILITÉ TOTALE DE MICROCHIP SUR TOUTES LES RÉCLAMATIONS LIÉES DE QUELQUE MANIÈRE QUE CE SOIT AUX INFORMATIONS OU À LEUR UTILISATION NE DÉPASSERA PAS LE MONTANT DES FRAIS, LE CAS ÉCHÉANT, QUE VOUS AVEZ PAYÉS DIRECTEMENT À MICROCHIP POUR LES INFORMATIONS.
L'utilisation des dispositifs Microchip dans des applications de maintien des fonctions vitales et/ou de sécurité est entièrement aux risques et périls de l'acheteur, qui s'engage à défendre, indemniser et dégager Microchip de toute responsabilité en cas de dommages, réclamations, poursuites ou dépenses résultant d'une telle utilisation. Aucune licence n'est transmise, implicitement ou autrement, en vertu des droits de propriété intellectuelle de Microchip, sauf indication contraire.
Marques déposées (Poser une question)
Le nom et le logo Microchip, le logo Microchip, Adaptec, AVR, le logo AVR, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, logo Microsemi, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, logo PIC32, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom , SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron et XMEGA sont des marques déposées de Microchip Technology Incorporated aux États-Unis et dans d'autres pays.
AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, logo ProASIC Plus, Quiet-Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime et ZL sont des marques déposées de Microchip Technology Incorporated aux États-Unis
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average Matching , DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, Programmation série en circuit, ICSP, INICnet, Mise en parallèle intelligente, IntelliMOS, Connectivité inter-puces, JitterBlocker, Bouton sur l'affichage, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, logo certifié MPLAB, MPLIB, MPLINK, MultiTRAK, NetDetach, Génération de code omniscient, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX , RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-IS, storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect et ZENA sont des marques commerciales de Microchip Technology Incorporated aux États-Unis et dans d'autres pays.
SQTP est une marque de service de Microchip Technology Incorporated aux États-Unis
Le logo Adaptec, Frequency on Demand, Silicon Storage Technology et Symmcom sont des marques déposées de Microchip Technology Inc. dans d'autres pays.
GestIC est une marque déposée de Microchip Technology Germany II GmbH & Co. KG, une filiale de Microchip Technology Inc., dans d'autres pays.
Toutes les autres marques commerciales mentionnées ici sont la propriété de leurs sociétés respectives.
©2023, Microchip Technology Incorporated et ses filiales. Tous les droits sont réservés.
ISBN: 978-1-6683-2164-5
Système de gestion de la qualité (Poser une question)
Pour plus d'informations sur les systèmes de gestion de la qualité de Microchip, veuillez visiter www.microchip.com/qualité.
Ventes et service dans le monde entier
| AMÉRIQUES | ASIE/PACIFIQUE | ASIE/PACIFIQUE | EUROPE |
| Siège social 2355, boulevard Chandler Ouest. Chandler, Arizona 85224-6199 Tél.: 480-792-7200 Fax: 480-792-7277 Support technique : www.microchip.com/support Web Adresse: www.microchip.com Atlanta Duluth, Géorgie Tél.: 678-957-9614 Fax: 678-957-1455 Austin, Texas Tél.: 512-257-3370 Boston Westborough, Massachusetts Tél.: 774-760-0087 Fax: 774-760-0088 Chicago Itasca, Illinois Tél.: 630-285-0071 Fax: 630-285-0075 Dallas Addison, TX Tél.: 972-818-7423 Fax: 972-818-2924 Détroit Novi, Michigan Tél.: 248-848-4000 Houston, Texas Tél.: 281-894-5983 Indianapolis Noblesville, Indiana Tél.: 317-773-8323 Fax: 317-773-5453 Tél.: 317-536-2380 Los Angeles Mission Viejo, Californie Tél.: 949-462-9523 Fax: 949-462-9608 Tél.: 951-273-7800 Raleigh, Caroline du Nord Tél.: 919-844-7510 New York, État de New York Tél.: 631-435-6000 San José, Californie Tél.: 408-735-9110 Tél.: 408-436-4270 Canada – Toronto Tél.: 905-695-1980 Fax: 905-695-2078 |
Australie – Sydney Tél. : 61-2-9868-6733 Chine – Pékin Tél. : 86-10-8569-7000 Chine – Chengdu Tél. : 86-28-8665-5511 Chine – Chongqing Tél. : 86-23-8980-9588 Chine – Dongguan Tél. : 86-769-8702-9880 Chine – Guangzhou Tél. : 86-20-8755-8029 Chine – Hangzhou Tél. : 86-571-8792-8115 Chine – RAS de Hong Kong Tél. : 852-2943-5100 Chine – Nankin Tél. : 86-25-8473-2460 Chine – Qingdao Tél. : 86-532-8502-7355 Chine – Shanghai Tél. : 86-21-3326-8000 Chine – Shenyang Tél. : 86-24-2334-2829 Chine – Shenzhen Tél. : 86-755-8864-2200 Chine – Suzhou Tél. : 86-186-6233-1526 Chine – Wuhan Tél. : 86-27-5980-5300 Chine – Xian Tél. : 86-29-8833-7252 Chine – Xiamen Tél. : 86-592-2388138 Chine – Zhuhai Tél. : 86-756-3210040 |
Inde – Bangalore Tél. : 91-80-3090-4444 Inde – New Delhi Tél. : 91-11-4160-8631 Inde – Pune Tél. : 91-20-4121-0141 Japon – Osaka Tél. : 81-6-6152-7160 Japon – Tokyo Tél : 81-3-6880-3770 Corée – Daegu Tél. : 82-53-744-4301 Corée – Séoul Tél. : 82-2-554-7200 Malaisie – Kuala Lumpur Tél. : 60-3-7651-7906 Malaisie – Penang Tél. : 60-4-227-8870 Philippines – Manille Tél. : 63-2-634-9065 Singapour Tél. : 65-6334-8870 Taïwan – Hsin Chu Tél. : 886-3-577-8366 Taïwan – Kaohsiung Tél. : 886-7-213-7830 Taïwan – Taipei Tél. : 886-2-2508-8600 Thaïlande – Bangkok Tél. : 66-2-694-1351 Vietnam–Ho Chi Minh Tél. : 84-28-5448-2100 |
Autriche – Wels Tél. : 43-7242-2244-39 Télécopieur : 43-7242-2244-393 Danemark – Copenhague Tél. : 45-4485-5910 Télécopieur : 45-4485-2829 Finlande – Espoo Tél. : 358-9-4520-820 France – Paris Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79 Allemagne – Garching Tél. : 49-8931-9700 Allemagne – Haan Tél. : 49-2129-3766400 Allemagne – Heilbronn Tél. : 49-7131-72400 Allemagne – Karlsruhe Tél. : 49-721-625370 Allemagne – Munich Tel: 49-89-627-144-0 Fax: 49-89-627-144-44 Allemagne – Rosenheim Tél. : 49-8031-354-560 Israël – Raanana Tél. : 972-9-744-7705 Italie – Milan Tél. : 39-0331-742611 Télécopieur : 39-0331-466781 Italie – Padoue Tél. : 39-049-7625286 Pays-Bas – Drunen Tél. : 31-416-690399 Télécopieur : 31-416-690340 Norvège – Trondheim Tél. : 47-72884388 Pologne – Varsovie Tél. : 48-22-3325737 Roumanie – Bucarest Tel: 40-21-407-87-50 Espagne – Madrid Tel: 34-91-708-08-90 Fax: 34-91-708-08-91 Suède – Göteborg Tel: 46-31-704-60-40 Suède – Stockholm Tél. : 46-8-5090-4654 Royaume-Uni – Wokingham Tél. : 44-118-921-5800 Télécopieur : 44-118-921-5820 |
© 2023 Microchip Technologie Inc.
et ses filiales
DS00004913A
Documents / Ressources
 |
Interface d'encodeur MICROCHIP v4.2 [pdf] Guide de l'utilisateur Interface d'encodeur v4.2, v4.2, interface d'encodeur, interface |