PPI ScanLog 4 Channel Universal Process Data Logger ກັບຊອບແວ PC

ຄູ່ມືຜູ້ໃຊ້ ScanLog 4C PC Version
ຂໍ້ມູນຜະລິດຕະພັນ
ສະບັບ ScanLog 4C PC ເປັນຕົວບັນທຶກຂໍ້ມູນຂະບວນການ 4 ຊ່ອງທາງທົ່ວໄປທີ່ມີຊອບແວ PC. ມັນມີແຜງດ້ານຫນ້າປະກອບດ້ວຍຈໍສະແດງຜົນ LCD ໂມໂນໂຄມ 72 × 40 ມມ (160 × 80 ພິກເຊລ) ແລະປຸ່ມເຍື່ອ. ການອ່ານກາຟິກແມ່ນຈໍສະແດງຜົນ LCD monochrome 80 X 160 pixel ທີ່ສະແດງຄ່າຂະບວນການວັດແທກສໍາລັບທັງ 4 ຊ່ອງແລະວັນທີ / ເວລາໃນປະຈຸບັນ. ຕົວຄວບຄຸມມີປຸ່ມ tactile ຫົກອັນທີ່ໃຫ້ຢູ່ໃນແຜງດ້ານຫນ້າສໍາລັບການຕັ້ງຄ່າຕົວຄວບຄຸມແລະການຕັ້ງຄ່າຄ່າພາລາມິເຕີ. ຊື່ຕົວແບບຂອງເຄື່ອງມືແມ່ນ ScanLog 4C PC, ແລະລຸ້ນຮາດແວ & ເຟີມແວແມ່ນເວີຊັນ 1.0.1.0.
ຄໍາແນະນໍາການນໍາໃຊ້ຜະລິດຕະພັນ
ກະດານດ້ານຫນ້າ: ຮູບແບບແລະການດໍາເນີນງານ
ແຜງດ້ານຫນ້າປະກອບດ້ວຍການອ່ານກາຟິກແລະຫົກປຸ່ມ (ເລື່ອນ, ແຈ້ງເຕືອນ, ລົງ, ຂຶ້ນ, ຕັ້ງຄ່າ, ເຂົ້າ). ປຸ່ມເລື່ອນສາມາດຖືກນໍາໃຊ້ເພື່ອເລື່ອນຜ່ານຫນ້າຈໍຂໍ້ມູນຂະບວນການຕ່າງໆໃນຮູບແບບການເຮັດວຽກປົກກະຕິ. ປຸ່ມຮັບຮູ້ການແຈ້ງເຕືອນຈະປິດສຽງອອກຂອງສັນຍານເຕືອນ (ຖ້າມີການເຄື່ອນໄຫວ) ແລະ views ຫນ້າຈໍສະຖານະປຸກ. ປຸ່ມລົງຫຼຸດລົງຄ່າພາລາມິເຕີ, ແລະປຸ່ມຂຶ້ນຈະເພີ່ມຄ່າພາລາມິເຕີ. ປຸ່ມຕັ້ງຄ່າຈະເຂົ້າ ຫຼືອອກຈາກໂໝດການຕັ້ງຄ່າ, ແລະປຸ່ມ enter ຈະເກັບຄ່າພາຣາມິເຕີທີ່ຕັ້ງໄວ້ ແລະເລື່ອນໄປຫາພາລາມິເຕີຕໍ່ໄປ.
ການດໍາເນີນງານພື້ນຖານ
ເມື່ອເປີດເຄື່ອງແລ້ວ, ຈໍສະແດງຜົນຈະສະແດງຊື່ຕົວແບບຂອງເຄື່ອງມື ແລະລຸ້ນຮາດແວ ແລະເຟີມແວເປັນເວລາ 4 ວິນາທີ. ຫຼັງຈາກນີ້, ເຄື່ອງມືເຂົ້າສູ່ໂຫມດການແລ່ນ, ເຊິ່ງເປັນໂຫມດການເຮັດວຽກປົກກະຕິ, ເຄື່ອງມືເລີ່ມຕົ້ນການວັດແທກ PV, ການຕິດຕາມສັນຍານເຕືອນ, ແລະການບັນທຶກ. ຈໍສະແດງຜົນປະກອບດ້ວຍຫນ້າຈໍຫລັກ, ຫນ້າຈໍຂໍ້ມູນບັນທຶກ, ແລະບັນທຶກ view ຫນ້າຈໍທີ່ອະທິບາຍຂ້າງລຸ່ມນີ້. ໜ້າຈໍເຫຼົ່ານີ້ປະກົດຂຶ້ນອີກດ້ານໜຶ່ງເມື່ອກົດປຸ່ມເລື່ອນໃນຂະນະທີ່ຢູ່ໃນໂໝດແລ່ນ. ຫນ້າຈໍສະຖານະການປຸກແມ່ນຍັງສາມາດໃຊ້ໄດ້ທີ່ສາມາດເປັນ viewed ໂດຍການກົດປຸ່ມຮັບຮູ້ການແຈ້ງເຕືອນ.
ໜ້າຈໍຫຼັກສະແດງວັນທີປະຕິທິນ (ວັນທີ/ເດືອນ/ປີ), ຊື່ຊ່ອງ, ຄ່າຂະບວນການວັດແທກທັງໝົດ 4 ຊ່ອງ, ຕົວຊີ້ບອກໂມງປຸກ ແລະເວລາໂມງ (ຊົ່ວໂມງ: ນາທີ: ວິນາທີ).
ແຜງໜ້າ
ແຜນຜັງ ແລະການດໍາເນີນງານ
ແຜງດ້ານໜ້າປະກອບດ້ວຍ 72×40 mm (160×80 pixels) Monochrome Graphic LCD Display & ກະແຈເຍື່ອ. ອ້າງອີງຮູບ 1.1 ຂ້າງລຸ່ມນີ້.

ການອ່ານກາຟິກ
ການອ່ານກາຟິກແມ່ນຈໍສະແດງຜົນ LCD Monochrome 80 X 160 Pixel. ໃນຮູບແບບການດໍາເນີນງານປົກກະຕິການ Readout ສະແດງໃຫ້ເຫັນການວັດແທກ
ຄ່າຂະບວນການສໍາລັບທັງ 4 ຊ່ອງ & ປັດຈຸບັນ ວັນທີ/ເວລາ. ຫນ້າຈໍສະຖານະປຸກສາມາດ viewed ໂດຍໃຊ້ປຸ່ມ 'ການຮັບຮູ້ການແຈ້ງເຕືອນ'.
ປຸ່ມເລື່ອນສາມາດຖືກນໍາໃຊ້ເພື່ອ view ຂໍ້ມູນການບັນທຶກ & ບັນທຶກທີ່ເກັບໄວ້.
ໃນຮູບແບບການຕັ້ງຄ່າ, Readout ສະແດງຊື່ພາຣາມິເຕີແລະຄ່າທີ່ສາມາດແກ້ໄຂໄດ້ໂດຍນໍາໃຊ້ປຸ່ມດ້ານຫນ້າ.
ຄີ
ມີກະແຈ tactile ຫົກອັນທີ່ໃຫ້ຢູ່ໃນແຜງດ້ານຫນ້າສໍາລັບການຕັ້ງຄ່າຕົວຄວບຄຸມແລະການຕັ້ງຄ່າຄ່າພາລາມິເຕີ. ໄດ້
ຕາຕະລາງ 1.1 ຂ້າງລຸ່ມນີ້ສະແດງແຕ່ລະຄີ (ກໍານົດໂດຍສັນຍາລັກຂອງແຜງດ້ານຫນ້າ) ແລະຫນ້າທີ່ທີ່ກ່ຽວຂ້ອງ.
ຕາຕະລາງ 1.1
| ສັນຍາລັກ | ກະແຈ | ຟັງຊັນ |
 |
ເລື່ອນ | ກົດເພື່ອເລື່ອນຜ່ານໜ້າຈໍຂໍ້ມູນຂະບວນການຕ່າງໆ ໃນຮູບແບບການເຮັດວຽກປົກກະຕິ. |
 |
ການແຈ້ງເຕືອນ | ກົດເພື່ອຮັບຮູ້ / ປິດສຽງສັນຍານເຕືອນ (ຖ້າມີການເຄື່ອນໄຫວ) & ເພື່ອ view ໜ້າຈໍສະຖານະປຸກ. |
 |
ລົງ | ກົດເພື່ອຫຼຸດລົງຄ່າພາລາມິເຕີ. ກົດຄັ້ງດຽວຫຼຸດລົງມູນຄ່າໂດຍການນັບຫນຶ່ງ; ການຮັກສາຄວາມກົດດັນເລັ່ງການປ່ຽນແປງ. |
 |
UP | ກົດເພື່ອເພີ່ມຄ່າພາລາມິເຕີ. ກົດຄັ້ງດຽວເພີ່ມມູນຄ່າໂດຍການນັບຫນຶ່ງ; ການຮັກສາຄວາມກົດດັນເລັ່ງການປ່ຽນແປງ. |
 |
ຕັ້ງຄ່າ | ກົດເພື່ອເຂົ້າ ຫຼືອອກຈາກໂໝດການຕັ້ງຄ່າ. |
 |
ປ້ອນ | ກົດເພື່ອເກັບຄ່າພາລາມິເຕີທີ່ຕັ້ງໄວ້ ແລະເພື່ອເລື່ອນໄປຫາພາລາມິເຕີຕໍ່ໄປ. |
ການດໍາເນີນງານພື້ນຖານຂອງຜະລິດຕະພັນ
ຈໍສະແດງຜົນພະລັງງານ
ເມື່ອເປີດເຄື່ອງຂຶ້ນມາ, ຈໍສະແດງຜົນຈະສະແດງຊື່ຕົວແບບຂອງເຄື່ອງມື (ScanLog 4C PC) ແລະລຸ້ນຮາດແວ ແລະເຟີມແວ (ເວີຊັ່ນ 1.0.1.0) ເປັນເວລາ 4 ວິນາທີ. ໃນລະຫວ່າງເວລານີ້, ເຄື່ອງມືແລ່ນຜ່ານ ລຳ ດັບການຈັບຕົວຕົນເອງ. ອ້າງອີງຮູບ 2.1.
ເປີດໃຊ້ໂໝດ
ຫຼັງຈາກລໍາດັບການສະແດງພະລັງງານ, ເຄື່ອງມືຈະເຂົ້າສູ່ໂຫມດ RUN. ນີ້ແມ່ນຮູບແບບການດໍາເນີນງານປົກກະຕິທີ່ເຄື່ອງມືເລີ່ມຕົ້ນການວັດແທກ PV, ການຕິດຕາມປຸກແລະການບັນທຶກ. ຈໍສະແດງຜົນປະກອບດ້ວຍໜ້າຈໍຫຼັກ, ໜ້າຈໍບັນທຶກຂໍ້ມູນ ແລະບັນທຶກ View ຫນ້າຈໍທີ່ອະທິບາຍຂ້າງລຸ່ມນີ້. ໜ້າຈໍເຫຼົ່ານີ້ປະກົດຂຶ້ນຫຼັງໜຶ່ງເມື່ອກົດປຸ່ມເລື່ອນໃນຂະນະທີ່ຢູ່ໃນໂໝດ RUN. ຫນ້າຈໍສະຖານະການປຸກຍັງມີຢູ່ທີ່ສາມາດເປັນ viewed ໂດຍກົດ Alarm Acknowledge key.
ໜ້າຈໍຫຼັກ

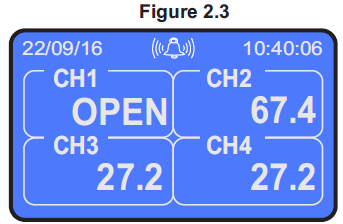
ໜ້າຈໍຫຼັກສະແດງຕົວເລກຊ່ອງ (CH1, CH2,….) ພ້ອມກັບຄ່າຂະບວນການທີ່ສອດຄ້ອງກັນ, ວັນທີປະຕິທິນ, ເວລາໂມງ ແລະຕົວຊີ້ບອກການປຸກ ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 2.2 ຂ້າງເທິງ. ຕົວຊີ້ວັດການປຸກຈະປາກົດຂຶ້ນພຽງແຕ່ຖ້າມີໂມງປຸກອັນໃດອັນໜຶ່ງ ຫຼືຫຼາຍກວ່ານັ້ນເປີດໃຊ້ງານ.
ໃນກໍລະນີຂອງການວັດແທກຄວາມຜິດພາດຂອງຊ່ອງ, ຂໍ້ຄວາມທີ່ລະບຸໄວ້ໃນຕາຕະລາງ 2.1 flash ແທນມູນຄ່າຂະບວນການດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 2.3.
ຕາຕະລາງ 2.1
| ຂໍ້ຄວາມ | ປະເພດຂໍ້ຜິດພາດ | ສາເຫດ | ||
| ເປີດເຊັນເຊີ | RTD / Thermocouple ແຕກ / ເປີດ | |||
| ເກີນຂອບເຂດ | ຄ່າຂະບວນການສູງກວ່າສູງສຸດ. ຂອບເຂດທີ່ລະບຸ | |||
| ລະດັບຕໍ່າກວ່າ | ຄ່າຂະບວນການຕໍ່າກວ່າຕໍ່າສຸດ. ຂອບເຂດທີ່ລະບຸ | |||
ໜ້າຈໍຊື່ຊ່ອງ
ໜ້າຈໍນີ້ຈະສະແດງເມື່ອກົດ![]() (ເລື່ອນ) ປຸ່ມຈາກໜ້າຈໍຫຼັກ. ໜ້າຈໍນີ້ສະແດງໃຫ້ຜູ້ໃຊ້ຕັ້ງຊື່ຊ່ອງທີ່ວາງແຜນຕໍ່ກັບຜູ້ອອກແບບ CH1 ສໍາລັບຊ່ອງ 1, CH2 ສໍາລັບຊ່ອງ 2 ແລະອື່ນໆ. ອ້າງອີງຕົວເລກ 2.4 ສໍາລັບຕົວຢ່າງampຫນ້າຈໍ.
(ເລື່ອນ) ປຸ່ມຈາກໜ້າຈໍຫຼັກ. ໜ້າຈໍນີ້ສະແດງໃຫ້ຜູ້ໃຊ້ຕັ້ງຊື່ຊ່ອງທີ່ວາງແຜນຕໍ່ກັບຜູ້ອອກແບບ CH1 ສໍາລັບຊ່ອງ 1, CH2 ສໍາລັບຊ່ອງ 2 ແລະອື່ນໆ. ອ້າງອີງຕົວເລກ 2.4 ສໍາລັບຕົວຢ່າງampຫນ້າຈໍ.
ໜ້າຈໍບັນທຶກຂໍ້ມູນ
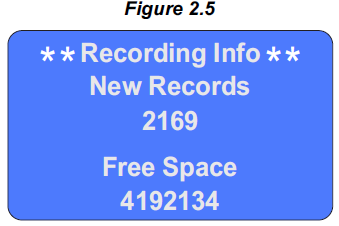
ໜ້າຈໍນີ້ຈະສະແດງເມື່ອກົດ ![]() ປຸ່ມ (ເລື່ອນ) ຈາກໜ້າຈໍຊື່ຊ່ອງ. ຫນ້າຈໍນີ້ສະແດງໃຫ້ເຫັນຕົວເລກຂອງບັນທຶກທີ່ໄດ້ຖືກເກັບໄວ້ໃນຄວາມບາບຂອງຫນ່ວຍຄວາມຈໍາທີ່ອັບໂຫລດຫຼ້າສຸດກັບ PC (ບັນທຶກໃຫມ່) ແລະຈໍານວນບັນທຶກທີ່ສາມາດເກັບໄວ້ໃນຫນ່ວຍຄວາມຈໍາຟຣີທີ່ມີຢູ່ (Free Space).
ປຸ່ມ (ເລື່ອນ) ຈາກໜ້າຈໍຊື່ຊ່ອງ. ຫນ້າຈໍນີ້ສະແດງໃຫ້ເຫັນຕົວເລກຂອງບັນທຶກທີ່ໄດ້ຖືກເກັບໄວ້ໃນຄວາມບາບຂອງຫນ່ວຍຄວາມຈໍາທີ່ອັບໂຫລດຫຼ້າສຸດກັບ PC (ບັນທຶກໃຫມ່) ແລະຈໍານວນບັນທຶກທີ່ສາມາດເກັບໄວ້ໃນຫນ່ວຍຄວາມຈໍາຟຣີທີ່ມີຢູ່ (Free Space).
ບັນທຶກ View ໜ້າຈໍ
ໜ້າຈໍນີ້ຈະສະແດງເມື່ອກົດ ![]() ປຸ່ມ (ເລື່ອນ) ຈາກໜ້າຈໍຂໍ້ມູນການບັນທຶກ. ໜ້າຈໍນີ້ອຳນວຍຄວາມສະດວກ viewຢູ່ໃນບັນທຶກໃຫມ່ທີ່ເກັບໄວ້. ບັນທຶກສາມາດເລື່ອນໄດ້ viewກຳລັງໃຊ້
ປຸ່ມ (ເລື່ອນ) ຈາກໜ້າຈໍຂໍ້ມູນການບັນທຶກ. ໜ້າຈໍນີ້ອຳນວຍຄວາມສະດວກ viewຢູ່ໃນບັນທຶກໃຫມ່ທີ່ເກັບໄວ້. ບັນທຶກສາມາດເລື່ອນໄດ້ viewກຳລັງໃຊ້![]() (ຂຶ້ນ) &
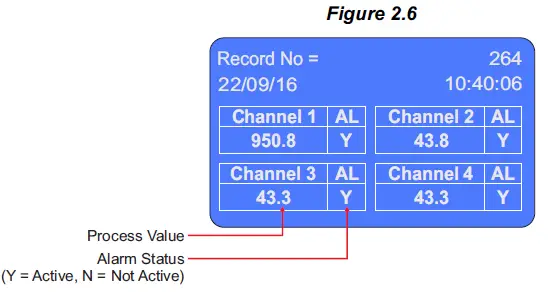
(ຂຶ້ນ) &![]() (ລົງ) ກະແຈ. ດັ່ງທີ່ໄດ້ອະທິບາຍໄວ້ໃນຮູບ 2.6; ບັນທຶກ view ໜ້າຈໍສະແດງບັນທຶກເທື່ອລະອັນ (ພ້ອມກັບໝາຍເລກບັນທຶກ) ທີ່ປະກອບດ້ວຍຄ່າຂະບວນການ ແລະສະຖານະປຸກສຳລັບແຕ່ລະຊ່ອງວັນທີ/ເວລາທີ່ຖືກຕ້ອງ.amped. ເມື່ອກົດປຸ່ມ UP ໃນຂະນະທີ່ສະແດງບັນທຶກທີ່ເກັບໄວ້ສຸດທ້າຍ, ບັນທຶກທໍາອິດຈະສະແດງ. ເຊັ່ນດຽວກັນເມື່ອກົດປຸ່ມລົງໃນຂະນະທີ່ສະແດງບັນທຶກທໍາອິດທີ່ເກັບໄວ້, ບັນທຶກສຸດທ້າຍຈະສະແດງ.
(ລົງ) ກະແຈ. ດັ່ງທີ່ໄດ້ອະທິບາຍໄວ້ໃນຮູບ 2.6; ບັນທຶກ view ໜ້າຈໍສະແດງບັນທຶກເທື່ອລະອັນ (ພ້ອມກັບໝາຍເລກບັນທຶກ) ທີ່ປະກອບດ້ວຍຄ່າຂະບວນການ ແລະສະຖານະປຸກສຳລັບແຕ່ລະຊ່ອງວັນທີ/ເວລາທີ່ຖືກຕ້ອງ.amped. ເມື່ອກົດປຸ່ມ UP ໃນຂະນະທີ່ສະແດງບັນທຶກທີ່ເກັບໄວ້ສຸດທ້າຍ, ບັນທຶກທໍາອິດຈະສະແດງ. ເຊັ່ນດຽວກັນເມື່ອກົດປຸ່ມລົງໃນຂະນະທີ່ສະແດງບັນທຶກທໍາອິດທີ່ເກັບໄວ້, ບັນທຶກສຸດທ້າຍຈະສະແດງ.
ໜ້າຈໍສະຖານະປຸກ
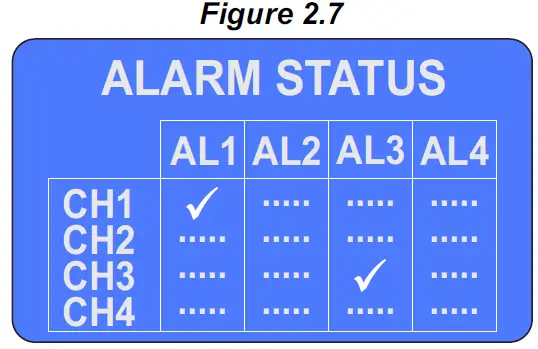
ໜ້າຈໍນີ້ຈະສະແດງເມື່ອກົດ![]() ປຸ່ມ (ການຮັບຮູ້ປຸກ) ຈາກຫນ້າຈໍ Run Mode. ໜ້າຈໍນີ້ສະແດງສະຖານະປຸກທັງໝົດ 4 ໂມງປຸກ (AL1 ຫາ AL4) ສຳລັບແຕ່ລະຊ່ອງ (CH1 ຫາ CH4). ໄດ້
ປຸ່ມ (ການຮັບຮູ້ປຸກ) ຈາກຫນ້າຈໍ Run Mode. ໜ້າຈໍນີ້ສະແດງສະຖານະປຸກທັງໝົດ 4 ໂມງປຸກ (AL1 ຫາ AL4) ສຳລັບແຕ່ລະຊ່ອງ (CH1 ຫາ CH4). ໄດ້![]() ສັນຍາລັກຫມາຍເຖິງການປຸກການເຄື່ອນໄຫວ.
ສັນຍາລັກຫມາຍເຖິງການປຸກການເຄື່ອນໄຫວ.
ພາຣາມິເຕີຜູ້ປະຕິບັດການ
ບັນຊີລາຍຊື່ຕົວກໍານົດການຂອງ Operator ປະກອບມີຄໍາສັ່ງ Start / Stop ສໍາລັບການບັນທຶກ batch (Slot) ແລະອະນຸຍາດໃຫ້ viewໃນຊ່ວງເວລາຍອດເງິນ.
ຖ້າຄຸນສົມບັດການບັນທຶກເປັນຊຸດບໍ່ໄດ້ເປີດໃຊ້ງານ, ການເລືອກໜ້າພາຣາມິເຕີຂອງຕົວປະຕິບັດການຈະກັບໄປໜ້າຈໍຫຼັກ.
ຮູບ 3.1 ສະແດງວິທີການເຂົ້າເຖິງຕົວກໍານົດການຂອງຕົວປະຕິບັດການ. Example ສະແດງໃຫ້ເຫັນວິທີການເລີ່ມຕົ້ນການບັນທຶກ batch.

ຕາຕະລາງ 3.1 ຂ້າງລຸ່ມນີ້ໄດ້ອະທິບາຍເຖິງຕົວກໍານົດການຂອງ Operator ໃນລາຍລະອຽດ.
ຕາຕະລາງ 3.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ |
| BATCH ເລີ່ມ
(ມີໃຫ້ຖ້າການບັນທຶກ Batch ຖືກເລືອກ) ພາລາມິເຕີນີ້ຖືກນໍາສະເຫນີພຽງແຕ່ຖ້າ batch ຍັງບໍ່ໄດ້ເລີ່ມຕົ້ນແລ້ວ. ຕັ້ງຄໍາສັ່ງ BATCH START ເປັນ 'ແມ່ນແລ້ວ' ເພື່ອເລີ່ມຕົ້ນການບັນທຶກຂໍ້ມູນ. ນີ້ປົກກະຕິແລ້ວແມ່ນອອກໃນຕອນເລີ່ມຕົ້ນຂອງຂະບວນການ batch. |
ບໍ່ ແມ່ນ |
| ການດຸ່ນດ່ຽງເວລາສະລັອດຕິງ
(ມີໃຫ້ຖ້າການບັນທຶກ Batch ຖືກເລືອກ ແລະຖ້າອອກຄຳສັ່ງ BATCH START) ນີ້ແມ່ນຄ່າທີ່ອ່ານພຽງແຕ່ສະແດງໃຫ້ເຫັນທີ່ໃຊ້ເວລາ Batch ທີ່ຍັງເຫຼືອ. |
ອ່ານເທົ່ານັ້ນ |
| BATCH Stop
(ມີໃຫ້ຖ້າການບັນທຶກ Batch ຖືກເລືອກ) ພາລາມິເຕີນີ້ຖືກນໍາສະເຫນີພຽງແຕ່ຖ້າ batch ໄດ້ຖືກເລີ່ມຕົ້ນແລ້ວ. ໂດຍຜ່ານການບັນທຶກ Batch ອັດຕະໂນມັດຢຸດໃນຕອນທ້າຍຂອງໄລຍະເວລາທີ່ກໍານົດໄວ້; ມັນອາດຈະຕ້ອງການຍົກເລີກການບັນທຶກທຸກເວລາໃນລະຫວ່າງຊຸດ. ຕັ້ງຄ່າຄຳສັ່ງ BATCH STOP ເປັນ 'ແມ່ນແລ້ວ' ເພື່ອຢຸດການບັນທຶກຂໍ້ມູນ ແລະຢຸດຊຸດຂໍ້ມູນ. |
ບໍ່ ແມ່ນ |
ການຕັ້ງຄ່າໂມງປຸກ
ຮູບ 4.1 ສະແດງວິທີການເຂົ້າເຖິງຕົວກໍານົດການປຸກ. Example ສະແດງໃຫ້ເຫັນວິທີການປ່ຽນແປງຄ່າຈຸດປຸກ 2 ສໍາລັບຊ່ອງ 2.

ຕາຕະລາງ: 4.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| ເລືອກຊ່ອງ
ເລືອກຊື່ຊ່ອງທີ່ຕ້ອງການທີ່ຈະຕັ້ງຄ່າການປຸກ. |
ຊ່ອງ-1 ຫາຊ່ອງ-4 |
| ເລືອກໂມງປຸກ
ເລືອກໝາຍເລກໂມງປຸກທີ່ຕ້ອງການຂອງຕົວກໍານົດການທີ່ຈະຖືກກໍານົດ. |
AL1, AL2, AL3, AL4
(ທາງເລືອກທີ່ມີຢູ່ຕົວຈິງແມ່ນຂຶ້ນກັບຕົວເລກຂອງໂມງປຸກ ຕັ້ງຕໍ່ຊ່ອງຢູ່ໃນໜ້າການຕັ້ງຄ່າໂມງປຸກ) |
| AL1 ປະເພດ
ຊື່ພາລາມິເຕີແມ່ນຂຶ້ນກັບໂມງປຸກທີ່ເລືອກ (AL1 TYPE, AL2 TYPE, ແລະອື່ນໆ). ບໍ່ມີ: ປິດການປຸກ. ຂະບວນການຕ່ໍາ: ໂມງປຸກຈະເປີດໃຊ້ງານເມື່ອ PV ເທົ່າກັບ ຫຼືຕໍ່າກວ່າຄ່າ 'ຈຸດຕັ້ງປຸກ'. ຂະບວນການສູງ: ໂມງປຸກຈະເປີດໃຊ້ງານເມື່ອ PV ເທົ່າກັບ ຫຼືເກີນຄ່າ 'ຈຸດຕັ້ງປຸກ'. |
ບໍ່ມີຂະບວນການຕ່ໍາຂະບວນການສູງ (ຄ່າເລີ່ມຕົ້ນ: ບໍ່ມີ) |
| AL1 SETPOINT
ຊື່ພາລາມິເຕີແມ່ນຂຶ້ນກັບໂມງປຸກທີ່ເລືອກ (AL1 Setpoint, AL2 Setpoint, ແລະອື່ນໆ). ຄ່າຕັ້ງຄ່າສຳລັບ 'Process High' ຫຼື 'Process Low' Alarm. |
ຕ່ຳສຸດ ເຖິງ Max. ຂອງໄລຍະປະເພດການປ້ອນຂໍ້ມູນທີ່ເລືອກ (ຄ່າເລີ່ມຕົ້ນ : 0) |
| AL1 HYSTERESIS
ຊື່ພາຣາມິເຕີແມ່ນຂຶ້ນກັບໂມງປຸກທີ່ເລືອກ (AL1 Hysteresis, AL2 Hysteresis, ແລະອື່ນໆ). ຄ່າພາຣາມິເຕີນີ້ກໍານົດແຖບຄວາມແຕກຕ່າງ (ຕາຍ) ລະຫວ່າງສະຖານະປຸກ ON ແລະ OFF. |
1 ຫາ 30000 (ຄ່າເລີ່ມຕົ້ນ : 20) |
| AL1 ຍັບຍັ້ງ
ຊື່ພາຣາມິເຕີແມ່ນຂຶ້ນກັບໂມງປຸກທີ່ເລືອກ (AL1 Inhibit, AL2 Inhibit, ແລະອື່ນໆ). ບໍ່: ໂມງປຸກບໍ່ໄດ້ຖືກລະງັບໄວ້ໃນລະຫວ່າງເງື່ອນໄຂການປຸກເລີ່ມຕົ້ນ. ແມ່ນແລ້ວ: ການເປີດໃຊ້ໂມງປຸກຖືກສະກັດກັ້ນຈົນກ່ວາ PV ຢູ່ໃນໂມງປຸກ ຈໍາກັດຈາກເວລາທີ່ເຄື່ອງບັນທຶກຖືກເປີດ. |
ບໍ່ ແມ່ນ
(ຄ່າເລີ່ມຕົ້ນ: ບໍ່) |
ການຕັ້ງຄ່າການເບິ່ງແຍງກວດກາ
The Page Header 'Spvr. Config' ກວມເອົາຊຸດຍ່ອຍຂອງຫົວຂໍ້ຫນ້າທີ່ມີພາລາມິເຕີທີ່ຖືກກໍານົດຫນ້ອຍລົງເລື້ອຍໆ.
ຕົວກໍານົດການເຫຼົ່ານີ້ຄວນຈະເຂົ້າເຖິງໄດ້ພຽງແຕ່ໃນລະດັບການຊີ້ນໍາແລະດັ່ງນັ້ນຈຶ່ງຖືກປ້ອງກັນໂດຍລະຫັດຜ່ານ. ເມື່ອໃສ່ລະຫັດຜ່ານທີ່ເຫມາະສົມສໍາລັບພາລາມິເຕີ 'ENTER PASSCODE', ບັນຊີລາຍຊື່ຕໍ່ໄປນີ້ຂອງຫົວຂໍ້ຫນ້າແມ່ນມີຢູ່.
- ການຕັ້ງຄ່າອຸປະກອນ (ການຕັ້ງຄ່າອຸປະກອນ)
- ການຕັ້ງຄ່າຊ່ອງ (ການຕັ້ງຄ່າຊ່ອງ)
- ການຕັ້ງຄ່າປຸກ (ການຕັ້ງຄ່າປຸກ)
- ການຕັ້ງຄ່າຕົວບັນທຶກ (ການຕັ້ງຄ່າຕົວບັນທຶກ)
- ການຕັ້ງຄ່າ RTC (ການຕັ້ງຄ່າ RTC)
- ປະໂຫຍດ (Utilites)
ຮູບຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນວິທີການເຂົ້າເຖິງຕົວກໍານົດການພາຍໃຕ້ຫົວຂໍ້ຫນ້າການເບິ່ງແຍງ "ການຕັ້ງຄ່າປຸກ". ພາລາມິເຕີທີ່ກວມເອົາພາຍໃຕ້ຫົວຂໍ້ຂອງແຕ່ລະຫນ້າແມ່ນໄດ້ອະທິບາຍຢ່າງລະອຽດໃນພາກຕໍ່ໄປນີ້.
ຮູບ 5.1

ການຕັ້ງຄ່າອຸປະກອນ
ຕາຕະລາງ: 6.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| ລຶບບັນທຶກ
ຕັ້ງຄ່າຄຳສັ່ງນີ້ເປັນ 'ແມ່ນແລ້ວ', ລຶບບັນທຶກທັງໝົດທີ່ເກັບໄວ້ໃນໜ່ວຍຄວາມຈຳພາຍໃນ. |
ບໍ່ ແມ່ນ (ຄ່າເລີ່ມຕົ້ນ: ບໍ່) |
| ID ບັນທຶກ
ພາລາມິເຕີນີ້ມອບຫມາຍເລກປະຈໍາຕົວທີ່ເປັນເອກະລັກໃຫ້ກັບ ScanLog ເຊິ່ງຖືກນໍາໃຊ້ໃນ file ລະບົບການຕັ້ງຊື່ສໍາລັບການດາວໂຫຼດບັນທຶກກັບ PC. |
1 ເຖິງ 127
(ເລີ່ມຕົ້ນ: 1) |
ການ ກຳ ນົດຊ່ອງ
ຕົວກໍານົດການກໍາຫນົດຄ່າຊ່ອງແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້ແລະໂດຍທົ່ວໄປແລ້ວຈໍາເປັນຕ້ອງໄດ້ກໍານົດພຽງແຕ່ໃນເວລາທີ່ການຕິດຕັ້ງ.
ຕາຕະລາງ: 7.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| CHAN ທົ່ວໄປ
ໃນຄໍາຮ້ອງສະຫມັກສ່ວນໃຫຍ່, ຫນ່ວຍບັນທຶກຂໍ້ມູນຖືກນໍາໃຊ້ເພື່ອຕິດຕາມມູນຄ່າຂະບວນການຢູ່ໃນຈຸດຕ່າງໆພາຍໃນພື້ນທີ່ປິດ (ຫ້ອງ, ຫ້ອງເຢັນ, ແລະອື່ນໆ). ດັ່ງນັ້ນປະເພດຂອງເຊັນເຊີແລະຄວາມລະອຽດການວັດແທກທີ່ໃຊ້ແມ່ນຄືກັນ (ທົ່ວໄປ) ສໍາລັບທຸກຊ່ອງທາງ. ພາລາມິເຕີນີ້ອໍານວຍຄວາມສະດວກໃນການກໍາຈັດການຕັ້ງຄ່າຊ້ໍາຊ້ອນສໍາລັບຫຼາຍຊ່ອງທາງໃນກໍລະນີນີ້. ແມ່ນແລ້ວ : ຄ່າພາຣາມິເຕີສຳລັບປະເພດການປ້ອນຂໍ້ມູນ ແລະຄວາມລະອຽດແມ່ນໃຊ້ກັບທຸກຊ່ອງ. ບໍ່ : ຄ່າພາຣາມິເຕີສຳລັບປະເພດການປ້ອນຂໍ້ມູນ ແລະຄວາມລະອຽດຈະຕ້ອງຖືກຕັ້ງເປັນເອກະລາດສຳລັບແຕ່ລະຊ່ອງ. |
ບໍ່ ແມ່ນ (ຄ່າເລີ່ມຕົ້ນ: ບໍ່) |
| ເລືອກຊ່ອງ
ອ້າງອີງຮູບ 7.1 (a) ແລະ 7.1 (b). |
ຊ່ອງ 1 ຫາ ຊ່ອງ 4 |
| ປະເພດເຂົ້າ
ກໍານົດປະເພດຂອງ Thermocouple / RTD / DC Linear signal input type ເຊື່ອມຕໍ່ກັບຊ່ອງທາງທີ່ເລືອກ. |
ຕາຕະລາງອ້າງອີງ 7.2
(ຄ່າເລີ່ມຕົ້ນ: 0 ຫາ 10 V) |
| ການແກ້ໄຂ
ກໍານົດການແກ້ໄຂຕົວຊີ້ວັດມູນຄ່າຂະບວນການ (ຈຸດທົດສະນິຍົມ). ທຸກໆຕົວກໍານົດການໂດຍອີງໃສ່ຄວາມລະອຽດ (hysteresis, alarm setpoints ແລະອື່ນໆ) ຫຼັງຈາກນັ້ນປະຕິບັດຕາມການຕັ້ງຄ່າການແກ້ໄຂນີ້. |
ຕາຕະລາງອ້າງອີງ 7.2 |
| ສັນຍານຕໍ່າ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ຄ່າສັນຍານສົ່ງສັນຍານອອກທີ່ກົງກັບຄ່າຂະບວນການ RANGE LOW. ອ້າງອີງ ເອກະສານຊ້ອນທ້າຍ-A: DC Linear Signal Interface ສໍາລັບລາຍລະອຽດ. |
 |
| ສັນຍານສູງ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ຄ່າສັນຍານສົ່ງສັນຍານອອກທີ່ສອດຄ້ອງກັບຄ່າຂະບວນການ RANGE HIGH. ອ້າງອີງ ເອກະສານຊ້ອນທ້າຍ-A: DC Linear Signal Interface ສໍາລັບລາຍລະອຽດ. |
 |
| ຊ່ວງຕ່ຳ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ຄ່າຂະບວນການທີ່ກົງກັບຄ່າ SIGNAL LOW ຈາກເຄື່ອງສົ່ງສັນຍານ. ເບິ່ງເອກະສານຊ້ອນທ້າຍ-A: DC Linear Signal Interface ສໍາລັບລາຍລະອຽດ. |
-30000 ເຖິງ +30000
(ເລີ່ມຕົ້ນ: 0.0) |
| ລະດັບສູງ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ຄ່າຂະບວນການທີ່ສອດຄ້ອງກັບຄ່າ SIGNAL HIGH ຈາກເຄື່ອງສົ່ງສັນຍານ. ເບິ່ງເອກະສານຊ້ອນທ້າຍ-A: DC Linear Signal Interface ສໍາລັບລາຍລະອຽດ. |
-30000 ເຖິງ +30000
(ເລີ່ມຕົ້ນ: 1000) |
| ຕັດຕ່ຳ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ອ້າງອີງເອກະສານຊ້ອນທ້າຍ-B. |
ປິດການ ນຳ ໃຊ້ Enable
(ຄ່າເລີ່ມຕົ້ນ: ປິດໃຊ້ງານ) |
| ຄລິບຕໍ່າ VAL
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ອ້າງອີງເອກະສານຊ້ອນທ້າຍ-B. |
-30000 ເຖິງ HIGH CLIP VAL
(ຄ່າເລີ່ມຕົ້ນ : 0) |
| ການຕັດສູງ
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ອ້າງອີງເອກະສານຊ້ອນທ້າຍ-B. |
ປິດການ ນຳ ໃຊ້ Enable
(ຄ່າເລີ່ມຕົ້ນ: ປິດໃຊ້ງານ) |
| ຄລິບສູງ VAL
(ໃຊ້ໄດ້ກັບ DC Linear Inputs ເທົ່ານັ້ນ) ອ້າງອີງເອກະສານຊ້ອນທ້າຍ-B. |
ຄລິບຕໍ່າ VAL ຫາ 30000
(ເລີ່ມຕົ້ນ: 1000) |
| ZERO OFFSET
ໃນຄໍາຮ້ອງສະຫມັກຈໍານວນຫຼາຍ, ການວັດແທກ PV ຢູ່ທີ່ວັດສະດຸປ້ອນຕ້ອງການຄ່າຄົງທີ່ທີ່ຈະຖືກເພີ່ມ ຫຼືຫັກອອກເພື່ອໃຫ້ໄດ້ຄ່າຂະບວນການສຸດທ້າຍສຳລັບການລຶບຂໍ້ຜິດພາດຂອງເຊັນເຊີສູນອອກ ຫຼືເພື່ອຊົດເຊີຍລະດັບຄວາມຮ້ອນທີ່ຮູ້ຈັກ. ພາລາມິເຕີນີ້ຖືກນໍາໃຊ້ເພື່ອເອົາຄວາມຜິດພາດດັ່ງກ່າວອອກ. ຕົວຈິງ (ສະແດງ) PV = ການວັດແທກ PV + Offset ສໍາລັບ PV. |
-30000 ເຖິງ +30000
(ຄ່າເລີ່ມຕົ້ນ : 0) |
ຕາຕະລາງ 7.2
| ທາງເລືອກ | ໄລຍະ (ຂັ້ນຕ່ຳຫາສູງສຸດ) | ຄວາມລະອຽດ & ຫນ່ວຍງານ |
| ປະເພດ J (Fe-K) | 0.0 ຫາ +960.0 ອົງສາ C |
1°C or 0.1°C |
| ປະເພດ K (Cr-Al) | -200.0 ຫາ +1376.0 ອົງສາ | |
| ປະເພດ T (Cu-Con) | -200.0 ຫາ +387.0 ອົງສາ | |
| ປະເພດ R (Rh-13%) | 0.0 ຫາ +1771.0 ອົງສາ C | |
| ປະເພດ S (Rh-10%) | 0.0 ຫາ +1768.0 ອົງສາ C | |
| ປະເພດ B | 0.0 ຫາ +1826.0 ອົງສາ C | |
| ປະເພດ N | 0.0 ຫາ +1314.0 ອົງສາ C | |
|
ສະຫງວນໄວ້ສໍາລັບລູກຄ້າປະເພດ Thermocouple ສະເພາະທີ່ບໍ່ໄດ້ລະບຸໄວ້ຂ້າງເທິງ. ປະເພດຈະຕ້ອງຖືກກໍານົດໃຫ້ສອດຄ່ອງກັບຄໍາສັ່ງ (ທາງເລືອກໃນການຮ້ອງຂໍ) ປະເພດ Thermocouple. |
||
| RTD Pt100 | -199.9 ຫາ +600.0 ອົງສາ | 1°C
or 0.1°C |
| 0 ຫາ 20 mA |
-30000 ຫາ 30000 ຫນ່ວຍ |
1 0.1 0.01 0.001 ໜ່ວຍ |
| 4 ຫາ 20 mA | ||
| 0 ຫາ 80 mV | ||
| ສະຫງວນໄວ້ | ||
| 0 ຫາ 1.25 V |
-30000 ຫາ 30000 ຫນ່ວຍ |
|
| 0 ຫາ 5 V | ||
| 0 ຫາ 10 V | ||
| 1 ຫາ 5 V | ||
ຮູບ 7.1(a)

ໝາຍເຫດ: ກົດ PAGE Key ເພື່ອກັບຄືນສູ່ໂໝດສະແດງຜົນຫຼັກ.

ການຕັ້ງຄ່າໂມງປຸກ
ຕາຕະລາງ: 8.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| ໂມງປຸກ/ຈັນ
ScanLog 4C PC ແມ່ນສະໜອງໃຫ້ 4 ສັນຍານເຕືອນອ່ອນທີ່ສາມາດຕັ້ງເປັນເອກະລາດຕໍ່ຊ່ອງ. ແນວໃດກໍ່ຕາມ, ຈໍານວນຕົວຈິງຂອງໂມງປຸກທີ່ຕ້ອງການຕໍ່ຊ່ອງອາດແຕກຕ່າງກັນໄປໃນແຕ່ລະແອັບພລິເຄຊັນ. ພາລາມິເຕີນີ້ອະນຸຍາດໃຫ້ເລືອກຈໍານວນທີ່ແນ່ນອນຂອງໂມງປຸກທີ່ຕ້ອງການຕໍ່ຊ່ອງ. |
1 ຫາ 4 (ຄ່າເລີ່ມຕົ້ນ : 4) |
ການຕັ້ງຄ່າການບັນທຶກ
ຕາຕະລາງ: 9.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| ໄລຍະຫ່າງປົກກະຕິ
ScanLog 4C PC ເຄົາລົບຄ່າພາລາມິເຕີນີ້ສໍາລັບການສ້າງບັນທຶກແຕ່ລະໄລຍະໃນເວລາທີ່ບໍ່ມີຊ່ອງທາງໃດຢູ່ພາຍໃຕ້ການປຸກ. ຕົວຢ່າງ, ຖ້າຄ່າພາລາມິເຕີນີ້ຖືກຕັ້ງເປັນ 0:00:30, ຫຼັງຈາກນັ້ນ, ການບັນທຶກໃຫມ່ຈະຖືກສ້າງທຸກໆ 30 ວິນາທີ. ຖ້າບໍ່ມີຊ່ອງຢູ່ໃນໂມງປຸກ. ການຕັ້ງຄ່າຄ່າພາລາມິເຕີນີ້ເປັນ 0:00:00 ປິດການບັນທຶກປົກກະຕິ. |
0:00:00 (H:MM:SS) ກັບ 2:30:00 (H:MM:SS) (ຄ່າເລີ່ມຕົ້ນ : 0:00:30) |
| ຊ່ວງເວລາຊູມ
ScanLog 4C PC ເຄົາລົບຄ່າພາລາມິເຕີນີ້ສໍາລັບການສ້າງບັນທຶກແຕ່ລະໄລຍະເມື່ອຊ່ອງໃດນຶ່ງ ຫຼືຫຼາຍກວ່ານັ້ນຢູ່ພາຍໃຕ້ການປຸກ. ຕົວຢ່າງ: ຖ້າຄ່າພາລາມິເຕີນີ້ຖືກຕັ້ງເປັນ 0:00:10, ຫຼັງຈາກນັ້ນ, ການບັນທຶກໃຫມ່ຈະຖືກສ້າງທຸກໆ 10 ວິນາທີ. ເມື່ອໃດກໍຕາມມີຊ່ອງໃດຢູ່ໃນໂມງປຸກ. |
0:00:00 (H:MM:SS) ກັບ 2:30:00 (H:MM:SS) (ຄ່າເລີ່ມຕົ້ນ : 0:00:10) |
| ການຕັ້ງຄ່າຄ່າພາຣາມິເຕີນີ້ເປັນ 0:00:00 ປິດການຊູມການບັນທຶກ. | |
| ALRM TOGGL REC
ຕັ້ງເປັນ 'ເປີດໃຊ້ງານ' ຖ້າຈະສ້າງການບັນທຶກທຸກຄັ້ງທີ່ສະຖານະການແຈ້ງເຕືອນສຳລັບຊ່ອງໃດຖືກສະຫຼັບ (ເປີດປິດ ຫຼື ປິດຫາເປີດ). |
ປິດການ ນຳ ໃຊ້ Enable
(ຄ່າເລີ່ມຕົ້ນ: ເປີດໃຊ້) |
| ຮູບແບບການບັນທຶກ
ຢ່າງຕໍ່ເນື່ອງ ເຄື່ອງຄອມພິວເຕີ ScanLog 4C ຮັກສາການບັນທຶກຢ່າງຕໍ່ເນື່ອງ. ບໍ່ມີຄໍາສັ່ງເລີ່ມຕົ້ນ / ຢຸດ. ເຫມາະສໍາລັບຂະບວນການຢ່າງຕໍ່ເນື່ອງ. ຊຸດ ScanLog 4C PC ສ້າງບັນທຶກໃນໄລຍະເວລາທີ່ກໍານົດໄວ້ກ່ອນ. ການບັນທຶກເລີ່ມຕົ້ນເມື່ອອອກຄຳສັ່ງ Start ແລະສືບຕໍ່ໄປຈົນກວ່າໄລຍະເວລາທີ່ຜູ້ໃຊ້ຕັ້ງໄວ້ຈະຜ່ານໄປ. ເຫມາະສໍາລັບຂະບວນການ batch. |
batch ຢ່າງຕໍ່ເນື່ອງ (ຄ່າເລີ່ມຕົ້ນ: ຢ່າງຕໍ່ເນື່ອງ) |
| BATCH TIME | 0:01 (HH:MM) |
| (ມີໃຫ້ສໍາລັບຮູບແບບການບັນທຶກ Batch)
ກໍານົດໄລຍະເວລາເປັນຊົ່ວໂມງ: ນາທີທີ່ການບັນທຶກຈະເກີດຂຶ້ນຈາກເວລາທີ່ຄໍາສັ່ງເລີ່ມຕົ້ນຖືກອອກ. |
ກັບ
250:00 (ຮຮ:ມມ) (ຄ່າເລີ່ມຕົ້ນ : 1:00) |
| BATCH ເລີ່ມ BATCH Stop
ສອງຕົວກໍານົດການເຫຼົ່ານີ້ຍັງມີຢູ່ໃນບັນຊີລາຍຊື່ຕົວກໍານົດການຂອງ Operator. ອ້າງອີງພາກທີ 3 : ຕົວກໍານົດການຂອງຕົວປະຕິບັດການ. |
ບໍ່ ແມ່ນ |
ການຕັ້ງຄ່າ RTC
ຕາຕະລາງ: 10.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ |
| ເວລາ (HH:MM) | 0.0 |
| ຕັ້ງເວລາໂມງປັດຈຸບັນເປັນ Hrs:ນາທີ (ຮູບແບບ 24 ຊົ່ວໂມງ). | ເປັນ 23:59 |
| DATE
ກໍານົດວັນທີປະຕິທິນປະຈຸບັນ. |
1 ຫາ 31 |
| ເດືອນ
ຕັ້ງເດືອນປະຕິທິນໃນປະຈຸບັນ. |
1 ຫາ 12 |
| ປີ
ຕັ້ງປີປະຕິທິນປະຈຸບັນ. |
2000 ຫາ 2099 |
| UNIQUE ID NUMBER
ບໍ່ສົນໃຈພາລາມິເຕີນີ້ຍ້ອນວ່າມັນແມ່ນສໍາລັບການນໍາໃຊ້ໂຮງງານເທົ່ານັ້ນ. |
ເຄື່ອງໃຊ້ຕ່າງໆ
ຕາຕະລາງ: 11.1
| ລາຍລະອຽດຂອງພາລາມິເຕີ | ການຕັ້ງຄ່າ (ຄ່າເລີ່ມຕົ້ນ) |
| ລັອກປົດລັອກ
ຕົວກໍານົດການເຫຼົ່ານີ້ລັອກຫຼືປົດລັອກການຕັ້ງຄ່າພາລາມິເຕີ. locking inhibits ການແກ້ໄຂ (ແກ້ໄຂ) ຄ່າພາລາມິເຕີເພື່ອປ້ອງກັນການປ່ຽນແປງ inadvertent ໂດຍຜູ້ປະກອບການ. ພາລາມິເຕີ 'ລັອກ' ແລະ 'ປົດລັອກ' ແມ່ນສະເພາະເຊິ່ງກັນແລະກັນ. ເມື່ອຢູ່ໃນສະພາບທີ່ຖືກລັອກ, ເຄື່ອງມືຮ້ອງຂໍໃຫ້ UNLOCK (ແມ່ນ / ບໍ່ແມ່ນ). ຕັ້ງຄ່າພາລາມິເຕີເປັນ 'ແມ່ນແລ້ວ' ແລະເຄື່ອງມືກັບຄືນສູ່ໂໝດຫຼັກ. ເຂົ້າຫາຕົວກໍານົດການນີ້ອີກເທື່ອຫນຶ່ງເພື່ອກໍານົດຄ່າສໍາລັບການ UNLOCK ເປັນ 'ແມ່ນແລ້ວ'. ເຄື່ອງມືກັບຄືນສູ່ໂໝດຫຼັກດ້ວຍການເປີດລັອກ. ສຳລັບການລັອກ, ພາຣາມິເຕີ LOCK ຈະຕ້ອງຖືກຕັ້ງເປັນ 'ແມ່ນແລ້ວ' ພຽງແຕ່ຄັ້ງດຽວເທົ່ານັ້ນ. |
ບໍ່ ແມ່ນ (ຄ່າເລີ່ມຕົ້ນ: ບໍ່) |
| ຂໍ້ມູນຄວາມຈິງ
ຕັ້ງຄ່າພາລາມິເຕີນີ້ເປັນ 'ແມ່ນແລ້ວ', ຣີເຊັດພາຣາມິເຕີທັງໝົດເປັນຄ່າເລີ່ມຕົ້ນຂອງພວກມັນ. ເມື່ອອອກຄໍາສັ່ງເລີ່ມຕົ້ນຈາກໂຮງງານ, ເຄື່ອງມືທໍາອິດເຂົ້າສູ່ໂຫມດ 'ການກວດສອບຄວາມຈໍາ' ບ່ອນທີ່ຫນ່ວຍຄວາມຈໍາພາຍໃນຖືກກວດສອບແລະມັນອາດຈະໃຊ້ເວລາຫຼາຍວິນາທີ. ຫຼັງຈາກການກວດສອບຫນ່ວຍຄວາມຈໍາພາລາມິເຕີໄດ້ຖືກຕັ້ງຄ່າເລີ່ມຕົ້ນຂອງໂຮງງານຜະລິດແລະເຄື່ອງມື reset & restarts. |
ບໍ່ ແມ່ນ (ຄ່າເລີ່ມຕົ້ນ: ບໍ່) |
ການເຊື່ອມຕໍ່ໄຟຟ້າ
ຄຳເຕືອນ
ຄວາມຜິດພາດ/ການລະເລີຍສາມາດສົ່ງຜົນໃຫ້ເກີດການເສຍຊີວິດສ່ວນຕົວ ຫຼື ບາດເຈັບສາຫັດ.
ຂໍ້ຄວນລະວັງ
ເຄື່ອງບັນທຶກໄດ້ຖືກອອກແບບສໍາລັບການຕິດຕັ້ງໃນ enclosure ທີ່ສະຫນອງການປົກປ້ອງທີ່ພຽງພໍຕໍ່ກັບການຊ໊ອກໄຟຟ້າ. ກົດລະບຽບທ້ອງຖິ່ນກ່ຽວກັບການຕິດຕັ້ງໄຟຟ້າຄວນໄດ້ຮັບການປະຕິບັດຢ່າງເຂັ້ມງວດ. ຄວນພິຈາລະນາເພື່ອປ້ອງກັນການເຂົ້າຫາແຫຼ່ງສະໜອງພະລັງງານໂດຍບຸກຄະລາກອນທີ່ບໍ່ໄດ້ຮັບອະນຸຍາດ.
- ຜູ້ໃຊ້ຕ້ອງປະຕິບັດຕາມກົດລະບຽບໄຟຟ້າທ້ອງຖິ່ນຢ່າງເຄັ່ງຄັດ.
- ຢ່າເຮັດການເຊື່ອມຕໍ່ໃດໆກັບ terminals ທີ່ບໍ່ໄດ້ໃຊ້ສໍາລັບການສ້າງຈຸດຜູກສໍາລັບສາຍໄຟອື່ນໆ (ຫຼືສໍາລັບເຫດຜົນອື່ນໆ) ຍ້ອນວ່າພວກມັນອາດຈະມີການເຊື່ອມຕໍ່ພາຍໃນບາງຢ່າງ. ການບໍ່ສັງເກດເຫັນອັນນີ້ອາດຈະສົ່ງຜົນໃຫ້ເຄື່ອງບັນທຶກຄວາມເສຍຫາຍຖາວອນ.
- ແລ່ນສາຍໄຟທີ່ແຍກອອກຈາກສາຍສັນຍານລະດັບຕໍ່າ (ເຊັ່ນ: Thermocouple, RTD, DC Linear Current /Voltage, ແລະອື່ນໆ). ຖ້າສາຍເຄເບີ້ນຖືກແລ່ນຜ່ານທໍ່ທໍ່, ໃຫ້ໃຊ້ທໍ່ແຍກສໍາລັບສາຍໄຟສາຍໄຟແລະສາຍສັນຍານລະດັບຕ່ໍາ.
- ໃຊ້ຟິວ ແລະສະຫຼັບທີ່ເໝາະສົມ, ບ່ອນໃດກໍໄດ້ທີ່ຈຳເປັນ, ສຳລັບການຂັບຂີ່ສຽງສູງtage ໂຫຼດເພື່ອປົກປ້ອງເຄື່ອງບັນທຶກຈາກຄວາມເສຍຫາຍທີ່ເປັນໄປໄດ້ເນື່ອງຈາກ vol ສູງtage surges ຂອງໄລຍະເວລາຂະຫຍາຍຫຼືວົງຈອນສັ້ນກ່ຽວກັບການໂຫຼດ.
- ລະວັງບໍ່ໃຫ້ແໜ້ນສະກູປາຍສຸດໃນຂະນະທີ່ເຊື່ອມຕໍ່.
- ໃຫ້ແນ່ໃຈວ່າການປິດການສະຫນອງພະລັງງານໃນຂະນະທີ່ເຮັດ / ຖອນການເຊື່ອມຕໍ່ໃດໆ.
ການເຊື່ອມຕໍ່ DIAGRAM
ແຜນຜັງການເຊື່ອມຕໍ່ໄຟຟ້າແມ່ນສະແດງຢູ່ດ້ານຫລັງຂອງຕູ້. ອ້າງອີງຮູບ 12.1 (a) & (b) ສໍາລັບລຸ້ນທີ່ບໍ່ມີ ແລະ ມີສັນຍານເຕືອນ Relay ອອກຕາມລໍາດັບ.


ຊ່ອງທາງເຂົ້າ
ແຕ່ລະຊ່ອງປ້ອນຂໍ້ມູນ 4 ອັນແມ່ນຄືກັນຈາກການເຊື່ອມຕໍ່ສາຍໄຟ viewຈຸດ. ສໍາລັບຈຸດປະສົງຄໍາອະທິບາຍ, 4 terminals ທີ່ກ່ຽວຂ້ອງກັບແຕ່ລະຊ່ອງໄດ້ຖືກຫມາຍເປັນ T1, T2 , T3 & T4 ໃນຫນ້າຕໍ່ໄປນີ້. ຄໍາອະທິບາຍຂ້າງລຸ່ມນີ້ໃຊ້ກັບທຸກຊ່ອງທາງທີ່ບໍ່ມີການບິດເບືອນ.
Thermocouple
ເຊື່ອມຕໍ່ Thermocouple Positive (+) ກັບ terminal T2 ແລະ Negative (-) ກັບ terminal T3 ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12.2(a). ໃຊ້ປະເພດທີ່ຖືກຕ້ອງຂອງສາຍນໍາການຂະຫຍາຍ Thermocouple ຫຼືສາຍຊົດເຊີຍສໍາລັບໄລຍະຫ່າງທັງຫມົດເພື່ອຮັບປະກັນ polarity ທີ່ຖືກຕ້ອງຕະຫຼອດ. ຫຼີກເວັ້ນຂໍ້ຕໍ່ໃນສາຍ.
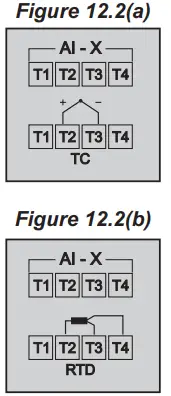
RTD Pt100, 3 ສາຍ
ເຊື່ອມຕໍ່ປາຍຫົວດຽວຂອງ RTD bulb ກັບ terminal T2 ແລະປາຍນໍາພາ double ກັບ terminals T3 ແລະ T4 (ປ່ຽນກັນໄດ້) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12.2(b). ໃຊ້ຕົວນໍາທອງແດງທີ່ມີຄວາມຕ້ານທານຕໍ່າຫຼາຍເພື່ອໃຫ້ແນ່ໃຈວ່າທັງ 3 ເສັ້ນແມ່ນວັດແທກແລະຄວາມຍາວດຽວກັນ. ຫຼີກເວັ້ນຂໍ້ຕໍ່ໃນສາຍ.
DC Linear Voltage (mV / V)
ໃຊ້ຄູ່ບິດທີ່ມີໄສ້ທີ່ມີໄສ້ທີ່ມີພື້ນຖານຢູ່ແຫຼ່ງສັນຍານສໍາລັບການເຊື່ອມຕໍ່ແຫຼ່ງ mV / V. ເຊື່ອມຕໍ່ທົ່ວໄປ (-) ກັບ terminal T3 ແລະສັນຍານ (+) ກັບ terminal T2, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12.2(c).
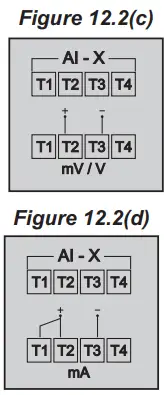
DC Linear Current (mA)
ໃຊ້ຄູ່ບິດທີ່ມີໄສ້ທີ່ມີໄສ້ທີ່ມີພື້ນຖານຢູ່ແຫຼ່ງສັນຍານສໍາລັບການເຊື່ອມຕໍ່ແຫຼ່ງ mA.
ເຊື່ອມຕໍ່ທົ່ວໄປ (-) ກັບ terminal T3 ແລະສັນຍານ (+) ກັບ terminal T2. ນອກຈາກນີ້ຍັງສັ້ນຢູ່ປາຍຍອດ T1 & T2. ອ້າງອີງຮູບ 12.2(d).
ສັນຍານເຕືອນ
- Relay 1 (Terminals: 9, 10, 11)
- Relay 2 (Terminals: 12, 13, 14)
- Relay 3 (Terminals: 15, 16, 17)
- Relay 4 (Terminals: 18, 19, 20)
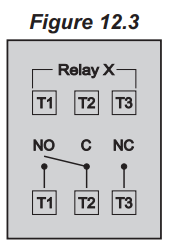
ຕິດຕໍ່ພົວພັນປ່ຽນ Relay ທີ່ບໍ່ມີທ່າແຮງ N/O (ປົກກະຕິເປີດ), C (ທົ່ວໄປ) ແລະ NC (ປົກກະຕິ Close) ຈັດອັນດັບ 2A/240 VAC (ການໂຫຼດຕ້ານທານ) ແມ່ນສະໜອງໃຫ້ເປັນຜົນຜະລິດ Relay. ໃຊ້ອຸປະກອນເສີມພາຍນອກເຊັ່ນ contactor ທີ່ມີລະດັບການຕິດຕໍ່ທີ່ເຫມາະສົມສໍາລັບການຂັບລົດການໂຫຼດຕົວຈິງ.
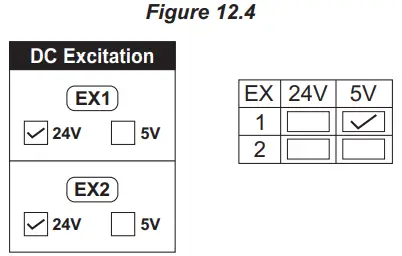
5 VDC / 24 VDC Excitation Voltage (Terminals : 5, 6, 7, 8)
ຖ້າສັ່ງ, ເຄື່ອງມືແມ່ນສະຫນອງໃຫ້ບໍ່ມີ, ຫນຶ່ງຫຼືສອງ excitation voltage ຜົນຜະລິດ. ທັງສອງຜົນຜະລິດ excitation ແມ່ນໂຮງງານຜະລິດ configured ບໍ່ວ່າຈະ 5VDC @ 15 mA ຫຼື 24VDC @ 83 mA. '+' ແລະ '-' terminals ແມ່ນສໍາລັບ voltage ເສັ້ນທາງ 'ແຫຼ່ງ' ແລະ 'ກັບຄືນ' ຕາມລໍາດັບ.
ຄວາມພ້ອມຂອງ Excitation Voltages, ຕາມຄໍາສັ່ງ, ແມ່ນຊີ້ໃຫ້ເຫັນ (ມີ ![]() ) ໃນປ້າຍແຜນວາດການເຊື່ອມຕໍ່ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12.4 ຂ້າງລຸ່ມນີ້.
) ໃນປ້າຍແຜນວາດການເຊື່ອມຕໍ່ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12.4 ຂ້າງລຸ່ມນີ້.
ຜອດການສື່ສານ PC (Terminals 3, 4)
ພອດການສື່ສານ PC ແມ່ນ RS485. ໃຊ້ຕົວແປງໂປໂຕຄອນທີ່ເຫມາະສົມ (ເວົ້າວ່າ, RS485 – RS232 ຫຼື USB – RS485) ສໍາລັບການຕິດຕໍ່ກັບ PC.
ສໍາລັບການສື່ສານທີ່ບໍ່ມີສິ່ງລົບກວນທີ່ເຊື່ອຖືໄດ້, ໃຫ້ໃຊ້ສາຍບິດຄູ່ພາຍໃນສາຍທີ່ມີຫນ້າຈໍ. ສາຍຄວນມີຄວາມຕ້ານທານຫນ້ອຍກວ່າ 100 ohms / km nominal DC (ໂດຍປົກກະຕິ 24 AWG ຫຼືຫນາກວ່າ). ເຊື່ອມຕໍ່ຕົວຕ້ານການສິ້ນສຸດ (ໂດຍປົກກະຕິ 100 ຫາ 150 ohm) ຢູ່ສົ້ນຫນຶ່ງເພື່ອປັບປຸງພູມຕ້ານທານສິ່ງລົບກວນ.
ພອດການສື່ສານອຸປະກອນ (Terminals 1, 2)
ບໍ່ໄດ້ນໍາໃຊ້. ຢ່າເຮັດການເຊື່ອມຕໍ່ໃດໆ.
ການສະຫນອງພະລັງງານ

ຕາມມາດຕະຖານ, ໂມດູນໄດ້ຖືກສະຫນອງດ້ວຍການເຊື່ອມຕໍ່ພະລັງງານທີ່ເຫມາະສົມສໍາລັບການສະຫນອງສາຍ 85 ຫາ 264 VAC. ໃຊ້ສາຍ conductor ທອງແດງທີ່ມີ insulated ດີຂອງຂະຫນາດບໍ່ນ້ອຍກວ່າ 0.5mm² ສໍາລັບການເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານຮັບປະກັນ polarity ທີ່ເຫມາະສົມດັ່ງທີ່ສະແດງໃນຮູບ 12.5. ໂມດູນບໍ່ໄດ້ສະຫນອງໃຫ້ກັບຟິວແລະສະຫຼັບພະລັງງານ. ຖ້າຈໍາເປັນ, ຕິດຕັ້ງພວກມັນແຍກຕ່າງຫາກ. ໃຊ້ fuse ທີ່ໃຊ້ເວລາ lag ທີ່ຈັດອັນດັບ 1A @ 240 VAC.
DC LINEAR INTERFACE
ເອກະສານຊ້ອນທ້າຍນີ້ອະທິບາຍພາລາມິເຕີທີ່ຕ້ອງການເພື່ອໂຕ້ຕອບຕົວສົ່ງສັນຍານຂະບວນການທີ່ຜະລິດ Linear DC Voltage (mV/V) ຫຼືປະຈຸບັນ (mA) ສັນຍານໃນອັດຕາສ່ວນກັບຄ່າຂະບວນການວັດແທກ. ສອງສາມ examples ຂອງ transmitters ດັ່ງກ່າວແມ່ນ;
- ເຄື່ອງສົ່ງຄວາມກົດດັນທີ່ຜະລິດ 4 ຫາ 20 mA ສໍາລັບ 0 ຫາ 5 psi
- ເຄື່ອງສົ່ງຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງທີ່ຜະລິດ 1 ຫາ 4.5 V ສໍາລັບ 5 ຫາ 95 %RH
- ເຄື່ອງສົ່ງອຸນຫະພູມທີ່ຜະລິດ 0 ຫາ 20 mA ສໍາລັບ -50 ຫາ 250 ° C
ເຄື່ອງມື (ຕົວຊີ້ບອກ/ຕົວຄວບຄຸມ/ເຄື່ອງບັນທຶກ) ທີ່ຮັບສັນຍານເສັ້ນຊື່ຈາກເຄື່ອງສົ່ງສັນຍານ ຄິດໄລ່ຄ່າຂະບວນການວັດແທກໂດຍການແກ້ສົມຜົນທາງຄະນິດສາດສຳລັບເສັ້ນກົງໃນຮູບແບບ:
Y = mX + C
ບ່ອນທີ່;
- X: ຄ່າສັນຍານຈາກເຄື່ອງສົ່ງສັນຍານ
- Y: ຄ່າຂະບວນການທີ່ກົງກັບຄ່າສັນຍານ X
- C: ມູນຄ່າຂະບວນການທີ່ກົງກັບ X = 0 (Y-intercept)
- m: ການປ່ຽນແປງໃນມູນຄ່າຂະບວນການຕໍ່ຫົວຫນ່ວຍການປ່ຽນແປງໃນຄ່າສັນຍານ (Slope)

ດັ່ງທີ່ເຫັນໄດ້ຊັດເຈນຈາກເຄື່ອງສົ່ງສັນຍານທີ່ໄດ້ກ່າວມາ examples, ເຄື່ອງສົ່ງສັນຍານທີ່ແຕກຕ່າງກັນຜະລິດສັນຍານທີ່ແຕກຕ່າງກັນທັງສອງປະເພດ (mV / V / mA) ແລະຊ່ວງ. ເຄື່ອງມື PPI ສ່ວນໃຫຍ່, ດັ່ງນັ້ນ, ສະຫນອງປະເພດສັນຍານແລະໄລຍະທີ່ສາມາດດໍາເນີນໂຄງການເພື່ອຄວາມສະດວກໃນການໂຕ້ຕອບກັບເຄື່ອງສົ່ງສັນຍານທີ່ຫຼາກຫຼາຍ. ປະເພດສັນຍານມາດຕະຖານອຸດສາຫະກໍາຈໍານວນຫນ້ອຍແລະຂອບເຂດທີ່ສະຫນອງໂດຍເຄື່ອງມື PPI ແມ່ນ: 0-80mV, 0-5 V, 1-5 V, 0-10V, 0-20 mA, 4-20 mA, ແລະອື່ນໆ.
ນອກຈາກນີ້, ຊ່ວງສັນຍານຜົນຜະລິດ (ຕົວຢ່າງ 1 ຫາ 4.5 V) ຈາກເຄື່ອງສົ່ງສັນຍານທີ່ແຕກຕ່າງກັນ ກົງກັບຊ່ວງຄ່າຂະບວນການທີ່ແຕກຕ່າງກັນ (ຕົວຢ່າງ: 5 ຫາ 95 %RH); ເຄື່ອງມືດັ່ງນັ້ນຈຶ່ງສະຫນອງສິ່ງອໍານວຍຄວາມສະດວກສໍາລັບການດໍາເນີນໂຄງການລະດັບມູນຄ່າຂະບວນການວັດແທກທີ່ມີຄວາມລະອຽດຂອງໂປຣແກຣມ.
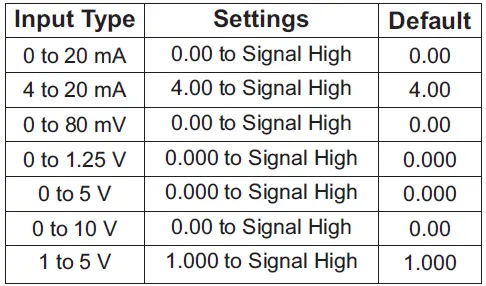
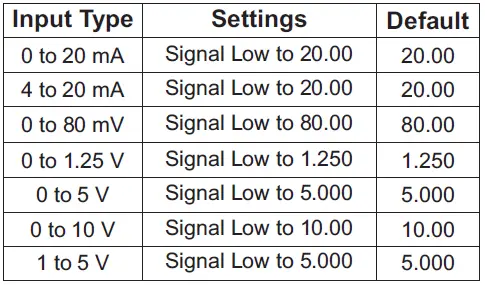
ເຄື່ອງສົ່ງສັນຍານເສັ້ນຕາມປົກກະຕິຈະລະບຸຄ່າສັນຍານສອງຢ່າງ (ສັນຍານຕ່ຳ ແລະສັນຍານສູງ) ແລະຄ່າຂະບວນການທີ່ສອດຄ້ອງກັນ (ຊ່ວງຕ່ຳ ແລະຊ່ວງສູງ). ໃນ example Pressure Transmitter ຂ້າງເທິງ; the Signal Low, Signal High, Range Low & Range ຄ່າສູງທີ່ລະບຸໄວ້ຄື: 4 mA, 20 mA, 0 psi & 5 psi, ຕາມລໍາດັບ.
ສະຫລຸບລວມແລ້ວ, 6 ຕົວກໍານົດການຕໍ່ໄປນີ້ແມ່ນຈໍາເປັນສໍາລັບການ interfacing Linear Transmitters:
- ປະເພດການປ້ອນຂໍ້ມູນ : ປະເພດສັນຍານ DC ມາດຕະຖານທີ່ຊ່ວງສັນຍານເຄື່ອງສົ່ງ ເໝາະ (ເຊັ່ນ: 4-20 mA)
- ສັນຍານຕ່ຳ : ຄ່າສັນຍານທີ່ສອດຄ້ອງກັບຊ່ວງຄ່າຂະບວນການຕໍ່າ (ເຊັ່ນ: 4.00 mA)
- ສັນຍານສູງ : ຄ່າສັນຍານທີ່ສອດຄ້ອງກັນກັບ Range ສູງຄ່າຂະບວນການ (ເຊັ່ນ 20.00 mA)
- PV Resolution : ຄວາມລະອຽດ (ນັບໜ້ອຍສຸດ) ທີ່ຈະຄຳນວນມູນຄ່າຂະບວນການ (ເຊັ່ນ: 0.01)
- ຊ່ວງຕ່ຳ : ຄ່າປະມວນຜົນທີ່ກົງກັບຄ່າສັນຍານຕ່ຳ (ເຊັ່ນ: 0.00 psi)
- Range High : ຄ່າປະມວນຜົນທີ່ກົງກັບຄ່າ Signal High (ເຊັ່ນ: 5.00 psi)
ຕໍ່ໄປນີ້ examples ສະແດງໃຫ້ເຫັນການເລືອກຄ່າພາລາມິເຕີທີ່ເຫມາະສົມ.
Exampເລ 1: ເຄື່ອງສົ່ງຄວາມກົດດັນທີ່ຜະລິດ 4 ຫາ 20 mA ສໍາລັບ 0 ຫາ 5 psi

Exampເລ 2: ເຄື່ອງສົ່ງຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງທີ່ຜະລິດ 1 ຫາ 4.5 V ສໍາລັບ 5 ຫາ 95 %RH

Exampເລ 3: ເຄື່ອງສົ່ງອຸນຫະພູມທີ່ຜະລິດ 0 ຫາ 20 mA ສໍາລັບ -50 ຫາ 250 ° C

ການຕັດຕ່ຳ/ສູງ
ສໍາລັບ mA/mV/V ປ້ອນຂໍ້ມູນ PV ທີ່ວັດແທກໄດ້ເປັນຄ່າຂະໜາດລະຫວ່າງຄ່າທີ່ກຳນົດໄວ້ສຳລັບ 'PV Range Low' ແລະ 'PV Range High'parameters ທີ່ສອດຄ້ອງກັບຄ່າສັນຍານຕ່ຳສຸດ ແລະຄ່າສູງສຸດຂອງສັນຍານຕາມລຳດັບ. ອ້າງອີງເອກະສານຊ້ອນທ້າຍ A.
ຮູບ B.1 ຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນເຖິງ example ຂອງການວັດແທກອັດຕາການໄຫຼໂດຍນໍາໃຊ້ transmitter / transducer ທີ່ຜະລິດລະດັບສັນຍານຂອງ 4 – 20 mA ທີ່ສອດຄ້ອງກັນກັບ 0.0 ກັບ 100.0 ລິດຕໍ່ນາທີ (LPM).
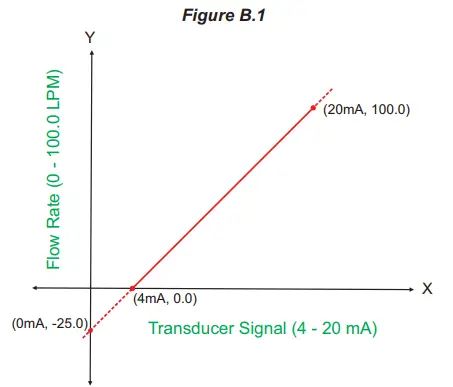
ຖ້າເຄື່ອງສົ່ງສັນຍານນີ້ຖືກໃຊ້ສໍາລັບລະບົບທີ່ມີລະດັບອັດຕາການໄຫຼຂອງ 0.0 ຫາ 75.0 LPM ຫຼັງຈາກນັ້ນ, ລະດັບສັນຍານທີ່ເປັນປະໂຫຍດທີ່ແທ້ຈິງຈາກ ex.ample transmitter ແມ່ນ 4 mA (~ 0.0 LPM) ຫາ 16 mA (~ 75.0 LPM) ເທົ່ານັ້ນ. ຖ້າບໍ່ມີ Clipping ຖືກນໍາໃຊ້ກັບອັດຕາການໄຫຼຂອງທີ່ວັດແທກແລ້ວ PV ທີ່ຖືກປັບຂະຫນາດຍັງຈະລວມເອົາຄ່າ 'ນອກຂອບເຂດ' ສໍາລັບຄ່າສັນຍານຕ່ໍາກວ່າ 4 mA ແລະສູງກວ່າ 16 mA (ອາດຈະເປັນຍ້ອນສະພາບຂອງເຊັນເຊີເປີດຫຼືຄວາມຜິດພາດຂອງການປັບທຽບ). ຄ່ານອກຂອບເຂດເຫຼົ່ານີ້ສາມາດຖືກສະກັດກັ້ນໂດຍການເປີດໃຊ້ການຕັດຕໍ່ຕ່ໍາ ແລະ/ຫຼືສູງ ທີ່ມີຄ່າ Clip ທີ່ເຫມາະສົມດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ B.2 ຂ້າງລຸ່ມນີ້.

ເຄື່ອງມືຄວາມຖືກຕ້ອງຂອງຂະບວນການ
101, ນິຄົມອຸດສາຫະກຳເພັດ, ນາວາກາ, ຖະໜົນວາໄຊ (E), ດິດ. Palghar – 401 210.Maharashtra, ອິນເດຍ
ຂາຍ: 8208199048 / 8208141446
ສົນໃຈຕິດຕໍ່: 07498799226 / 08767395333
sales@ppiindia.net, support@ppiindia.net
ເອກະສານ / ຊັບພະຍາກອນ
 |
PPI ScanLog 4 Channel Universal Process Data Logger ກັບຊອບແວ PC [pdf] ຄູ່ມືຜູ້ໃຊ້ 4C PC Version, ScanLog 4 Channel Universal Process Data Logger with PC Software, 4 Channel Universal Process Data Logger with PC Software, Universal Process Data Logger with PC Software, Process Data Logger with PC Software, Data Logger with PC Software, PC Software |