យន្តហោះ HOBBYEAGLE A3 Super 4 Flig RC

សូមអរគុណសម្រាប់ការទិញផលិតផលរបស់យើង។ A3 Super 4 គឺជាម៉ាស៊ីន 6-axis gyro និងមុខងារមានមុខងារខ្ពស់ ដែលត្រូវបានរចនាឡើងសម្រាប់យន្តហោះ R/C ។ ដើម្បីឱ្យអ្នកអាចប្រើប្រាស់ gyro បានល្អបំផុត និងហោះហើរដោយសុវត្ថិភាព សូមអានសៀវភៅណែនាំនេះដោយប្រុងប្រយ័ត្ន ហើយដំឡើងឧបករណ៍ដូចដែលបានពិពណ៌នាខាងក្រោម។
កំណត់ចំណាំសំខាន់ៗ
- ម៉ូដែលដែលគ្រប់គ្រងដោយវិទ្យុ (R/C) មិនមែនជារបស់ក្មេងលេងទេ! កង្ហារបង្វិលក្នុងល្បឿនលឿន និងបង្កហានិភ័យដែលអាចកើតមាន។ ពួកគេអាចបណ្តាលឱ្យមានរបួសធ្ងន់ធ្ងរដោយសារតែការប្រើប្រាស់មិនត្រឹមត្រូវ។ វាចាំបាច់ដើម្បីសង្កេតមើលច្បាប់សុវត្ថិភាពទូទៅសម្រាប់ម៉ូដែល R/C និងច្បាប់ក្នុងតំបន់។ អានការណែនាំខាងក្រោមឱ្យបានហ្មត់ចត់មុនពេលប្រើ gyros របស់អ្នកជាលើកដំបូង ហើយដំឡើង gyro ដោយប្រុងប្រយ័ត្នយោងទៅតាមសៀវភៅណែនាំនេះ។ យើងក៏សូមណែនាំឱ្យអ្នកស្វែងរកជំនួយពីអ្នកបើកបរដែលមានបទពិសោធន៍ មុនពេលព្យាយាមហោះហើរជាមួយ gyros របស់យើងជាលើកដំបូង!
- បន្ទាប់ពីបើកភ្លើង gyro ត្រូវការធ្វើការក្រិតតាមខ្នាត gyroscope ត្រឹមត្រូវ រក្សាយន្តហោះឱ្យនៅស្ងៀម បន្ទាប់ពីបើកភ្លើង ហើយរង់ចាំខណៈពេលដែល LED បញ្ចេញពន្លឺពណ៌ខៀវ។ LED នឹងមានពណ៌ខៀវរឹង ប្រសិនបើចលនាបន្តិចត្រូវបានរកឃើញ ហើយការក្រិតតាមខ្នាតនឹងមិនចាប់ផ្តើមទេ រហូតទាល់តែអ្នកឈប់ផ្លាស់ទីយន្តហោះ ទោះជាយ៉ាងណាក៏ដោយ ការធ្វើឱ្យកម្រិតយន្តហោះមិនត្រូវបានទាមទារកំឡុងពេលចាប់ផ្តើមនោះទេ។
- ការដាក់បន្ទះឈើក៏ត្រូវបានទាមទារផងដែរបន្ទាប់ពីការក្រិតតាមខ្នាត gyroscope ។ តែងតែដាក់ដំបងទាំងអស់នៅកណ្តាល (ដំបងបិទបើកនៅទីតាំងទាបបំផុត) មុនពេលថាមពលនៅលើយន្តហោះ ហើយកុំរំកិលដំបងរហូតដល់ការចាប់ផ្តើមដំណើរការ។ ការដាក់ចំកណ្តាលដំបងអនុវត្តចំពោះតែប៉ុស្តិ៍ Aileron, Elevator, Rudder, Aileron 2 និង Elevator 2 channels។ ត្រូវប្រាកដថាពិនិត្យមើលទិសដៅ gyro របស់ Aileron, Elevator និង Rudder បន្ទាប់ពីដំឡើងរួច ហើយតែងតែធ្វើតេស្តពួកវាមុនពេលហោះហើរនីមួយៗ។ ប្រតិកម្មផ្ទុយរបស់ gyro អាចនាំឱ្យបាត់បង់ការគ្រប់គ្រង ឬសូម្បីតែគាំង!
- វាត្រូវបានណែនាំអោយប្រើ capacitor 3300uF/16V ដែលបានផ្គត់ផ្គង់ ដើម្បីទទួលបានវ៉ុលការងារដែលមានស្ថេរភាព និងសុវត្ថិភាពជាងមុន។tage បន្ទាប់ពីដំឡើង gyro ។ capacitor អាចត្រូវបានដោតនៅលើឧបករណ៍ភ្ជាប់ឥតគិតថ្លៃណាមួយរបស់ gyro ឬអ្នកទទួល។
ការដំឡើង
កំណត់ចំណាំ
- កុំប្រើកាវរលាយក្តៅ ឬចំណងនីឡុង ដើម្បីជួសជុល gyro នៅលើយន្តហោះ!
- អ្នកត្រូវការតែមួយដុំនៃកាសែតទ្វេភាគីរាល់ពេល ប្រភេទនៃការដំឡើងដែលទន់ពេក ឬក្រាស់ពេកអាចប៉ះពាល់ដល់ដំណើរការរបស់ gyro ។
- gyro គឺជាឧបករណ៍ចាប់សញ្ញា សូមដាក់កន្លែងទំនេរគ្រប់គ្រាន់នៅជុំវិញ gyro និងរក្សា gyro ឱ្យឆ្ងាយពីឧបករណ៍អេឡិចត្រូនិច ឬខ្សែភ្លើងផ្សេងទៀតតាមដែលអាចធ្វើទៅបាន។
ការតំរង់ទិស
ប្រើខ្សែអាត់ពីរមុខដែលបានផ្គត់ផ្គង់មួយដើម្បីភ្ជាប់ gyro ទៅនឹងយន្តហោះយ៉ាងរឹងមាំ។ សម្រាប់ដំណើរការល្អបំផុត gyro គួរតែត្រូវបានម៉ោនឱ្យជិតទៅនឹង CG តាមដែលអាចធ្វើទៅបាន ហើយគែមលំនៅដ្ឋានត្រូវតែត្រូវបានតម្រឹមយ៉ាងពិតប្រាកដស្របទៅនឹងអ័ក្សបង្វិលទាំងបីនៃយន្តហោះ។ Gyro អាចត្រូវបានភ្ជាប់ដោយរាបស្មើ ឬបញ្ឈរ ហើយថែមទាំងដាក់បញ្ច្រាស ទោះយ៉ាងណាក៏ដោយ អ្នកត្រូវតែធានាថាព្រួញនៅលើស្ទីគ័រតែងតែចង្អុលទៅទិសដៅក្បាល បើមិនដូច្នោះទេ gyro នឹងមិនដំណើរការជាធម្មតាក្នុងរបៀប ANGLE, LEVEL និង HOVER ទេ។
ការតភ្ជាប់ទទួល
អ្នកទទួល PWM ស្តង់ដារ
នៅពេលប្រើឧបករណ៍ទទួល PWM ស្តង់ដារ A3S4 មានបណ្តាញបញ្ចូលចំនួន 7 ដែលយ៉ាងហោចណាស់ឆានែលមួយគួរត្រូវបានភ្ជាប់ជាមួយអ្នកទទួលនៅក្នុង Aileron (A), Elevator (E) និង Rudder (R) បើមិនដូច្នោះទេ gyro នឹងចូលទៅក្នុងរបៀបអស់ពេលអ្នកទទួល ( ពន្លឺក្រហមយឺត) ។ ការពិពណ៌នាអំពីបណ្តាញបញ្ចូលត្រូវបានបង្ហាញក្នុងតារាងខាងក្រោម។
កំណត់ចំណាំ
- [Serial RX/M] ត្រូវបានប្រើសម្រាប់ការប្តូររបៀបហោះហើរ ប្រើកុងតាក់ 3 ទីតាំងរបស់ឧបករណ៍បញ្ជូន ដើម្បីប្តូររបៀបហោះហើរអំឡុងពេលហោះហើរ។
- [G] ត្រូវបានប្រើសម្រាប់ការគ្រប់គ្រងការទទួលបានមេពីចម្ងាយ ឧបករណ៍ស្លាយ ឬកុងតាក់នៃឧបករណ៍បញ្ជូនអាចត្រូវបានប្រើដើម្បីលៃតម្រូវ ឬផ្លាស់ប្តូរការទទួលបានមេអំឡុងពេលហោះហើរ។
- ភ្ជាប់ ESC ឬ throttle servo ទៅកាន់អ្នកទទួលដោយផ្ទាល់ដោយមិនឆ្លងកាត់ gyro ។
- ម្ជុលនៅលើរន្ធដោត [AER] និង [A2-E2-G] ត្រូវបានប្រើតែជាម្ជុលបញ្ចូលសញ្ញាប៉ុណ្ណោះ កុំភ្ជាប់ប្រភពថាមពលនៅលើម្ជុលទាំងនេះ។
- យកចិត្តទុកដាក់លើភាពរាងប៉ូលនៃដោត។ ខ្សែសញ្ញាពណ៌ទឹកក្រូចត្រូវតែស្ថិតនៅលើកំពូល និងពណ៌ត្នោតនៅខាងក្រោមជានិច្ច។
អ្នកទទួលខ្សែតែមួយ
A3S4 គាំទ្រ PPM និង multi-protocol digital serial receivers ដែលអនុញ្ញាតឱ្យអ្នកភ្ជាប់អ្នកទទួលទៅ gyro ជាមួយនឹងខ្សែតែមួយនៅលើរន្ធ [Serial RX/M]។ នៅពេលប្រើអ្នកទទួលខ្សែតែមួយ បណ្តាញឆ្លងកាត់ជំនួយចំនួន 2 (AUX1 និង AUX2) អាចរកបានដែលអាចត្រូវបានប្រើដើម្បីបញ្ចេញឆានែលដែលរំពឹងទុករបស់អ្នកទទួលដោយផ្ទាល់។ តាមលំនាំដើម AUX1 តែងតែត្រូវបានកំណត់ទៅ Throttle ហើយអនុវត្តចំពោះ OUT5 ខណៈពេលដែល AUX2 ត្រូវបានបិទ។ នៅពេលដំណើរការក្នុងរបៀបបន្ទាត់តែមួយ gyro ប្រើការកំណត់ឆានែលដែលបានកំណត់ជាមុនដើម្បីសម្គាល់ឆានែលពីអ្នកទទួល។ សូមពិនិត្យមើលថាតើការគូសផែនទីឆានែលបច្ចុប្បន្នត្រូវគ្នានឹងលំដាប់ឆានែលរបស់អ្នកបញ្ជូនតាមរយៈឧបករណ៍កំណត់រចនាសម្ព័ន្ធ ឬកាតកម្មវិធី។ បន្ទាប់ពីរាល់ពេលដែលអ្នកបានផ្លាស់ប្តូរប្រភេទអ្នកទទួល អ្នកអាចជ្រើសរើសដើម្បីកំណត់ឆានែលឡើងវិញ ឬដើម្បីរក្សាការកំណត់ដែលមានស្រាប់។ ជ្រើសរើស “គ្មាន” សម្រាប់ប៉ុស្តិ៍ដែលអ្នកមិនប្រើ។
តារាងទី 1៖ ពិធីការអ្នកទទួលសៀរៀលដែលគាំទ្រ និងការកំណត់ប៉ុស្តិ៍លំនាំដើម

កំណត់ចំណាំ
- សូមចំណាំថាបណ្តាញបញ្ចូលនៃ ELE2, GAIN និង AUX2 ត្រូវបានបិទនៅក្នុងរបៀបបន្ទាត់តែមួយតាមលំនាំដើម។ ដើម្បីបើកបណ្តាញទាំងនេះ អ្នកត្រូវបញ្ជាក់លេខឆានែលសម្រាប់ពួកវាតាមរយៈឧបករណ៍កំណត់រចនាសម្ព័ន្ធ ឬកាតសរសេរកម្មវិធី។
- យកចិត្តទុកដាក់លើភាពរាងប៉ូលនៃដោត។ ខ្សែសញ្ញាពណ៌ទឹកក្រូចត្រូវតែស្ថិតនៅលើកំពូល និងពណ៌ត្នោតនៅខាងក្រោមជានិច្ច។
- អាដាប់ទ័រ ឬឧបករណ៍បំលែងស្រេចចិត្តពិសេសគឺត្រូវបានទាមទារប្រសិនបើអ្នកចង់ប្រើឧបករណ៍ទទួលផ្កាយរណប Spektrum (ពីចម្ងាយ) ឬឧបករណ៍ទទួលពីចម្ងាយ SRXL2 ។
អ្នកទទួលផ្កាយរណប Spektrum DSM2/X
ដោយប្រើអាដាប់ទ័រ DSM អ្នកទទួលផ្កាយរណប Spektrum (ពីចម្ងាយ) អាចត្រូវបានភ្ជាប់ដោយផ្ទាល់ទៅ gyro ។

អ្នកទទួល Spektrum SRXL2
ដោយប្រើអាដាប់ទ័រ SRXL2 A3S4 គាំទ្រឧបករណ៍ទទួលស៊េរី SRXL2 ចុងក្រោយបង្អស់របស់ Spektrum ដូចជា SPM4651T, SPMAR8020T ជាដើម។ សូមចំណាំថាប្រភេទអ្នកទទួលរបស់ gyro ត្រូវតែកំណត់ទៅជារបៀប SBUS នៅពេលប្រើអាដាប់ទ័រ SRXL2 ។
អំពី Failsafe
- អ្នកទទួល Failsafe អ្នកទទួលភាគច្រើននឹងចូលទៅក្នុងរបៀប Failsafe ក្នុងករណីបាត់បង់សញ្ញាពីឧបករណ៍បញ្ជូន។ នៅក្នុងលក្ខខណ្ឌបែបនេះ gyro នឹងទទួលបានអត្ថប្រយោជន៍ពីមុខងារ Failsafe/Hold ដើមរបស់អ្នកទទួល។ ត្រូវប្រាកដថាការកំណត់ Failsafe ត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវនៅក្នុងឧបករណ៍បញ្ជូន។
- Gyro Failsafe gyro ក៏ផ្តល់នូវមុខងារ Failsafe កម្រិត gyro នៅពេលដែលការតភ្ជាប់បរាជ័យពីអ្នកទទួល។ នៅពេលដែលមុខងារត្រូវបានធ្វើឱ្យសកម្ម LED នឹងបន្តបញ្ចេញពន្លឺក្រហមយឺត ហើយ servos ទាំងអស់នឹងផ្លាស់ទីទៅទីតាំងដំបូងរបស់ពួកគេនៅពេលចាប់ផ្តើម រួមទាំង AUX1 និង AUX2 channels gyro នឹងប្តូរទៅរបៀបធម្មតាដោយស្វ័យប្រវត្តិ ហើយការទទួលបានមេពីចម្ងាយនឹងត្រូវបានបិទ។
ការតភ្ជាប់ចេញ
មុខងារលទ្ធផល
A3S4 ផ្តល់នូវប៉ុស្តិ៍ទិន្នផល PWM ផ្ទាល់ខ្លួនចំនួន 5 រួមទាំង OUT1 ដល់ OUT5 ដែលមុខងារអាចត្រូវបានបញ្ជាក់ដោយអ្នកប្រើប្រាស់។ មុខងារដែលមានត្រូវបានបង្ហាញក្នុងតារាងខាងក្រោម។
តារាងទី 2: អនុគមន៍ទិន្នផល

កំណត់ចំណាំ៖
គឺជាការកំណត់លំនាំដើមនៃរបៀបទទួល PWM ស្តង់ដារ។ AUX1 និង AUX2 ទាំងពីរមិនត្រឹមត្រូវនៅក្នុងរបៀបទទួល PWM ស្តង់ដារ។ OUT5 តែងតែត្រូវបានកំណត់ជាមុនដើម្បីបញ្ចេញឆានែល AUX1 នៅក្នុង PPM ឬរបៀបទទួលសៀរៀលតាមលំនាំដើម។
Servo បញ្ច្រាស
មុខងារ Servo Reverse ត្រូវបានរចនាឡើងដើម្បីប្រើសម្រាប់ servos បញ្ច្រាសample នៅពេលដែលដំណើរការ gyro នៅក្នុងរបៀបបញ្ជា aileron តែមួយជាមួយនឹង servo aileron ពីរតភ្ជាប់ វានឹងមិនអាចទៅរួចទេក្នុងការបញ្ច្រាស servo ដាច់ដោយឡែក ប្រសិនបើ servo បញ្ច្រាសកំពុងត្រូវបានប្រើនៅផ្នែកម្ខាងនៃស្លាប។ ក្នុងករណីនេះមុខងារ Servo Reverse ដែលផ្តល់ដោយ gyro ធ្វើឱ្យវាងាយស្រួលក្នុងការផ្លាស់ប្តូរទិសដៅមួយនៃ servos ។ ដូចគ្នានេះដែរអនុវត្តចំពោះកម្មវិធីដូចជា servos ជណ្តើរយន្តពីរ servos ស្លាបពីរនៃ delta wing ឬ servos កន្ទុយពីរនៃយន្តហោះ v-tail ។
ប្រភេទ Wing និងការភ្ជាប់ Servo
A3S4 គាំទ្រ Standard Fixed-wing, Flying-wing (Delta-wing) និង V-Tail ។ តែងតែបិទមុខងារលាយនៃ delta-wing ឬ v-tail នៅក្នុងឧបករណ៍បញ្ជូន ពីព្រោះ gyro នឹងផ្តល់នូវមុខងារលាយបែបនេះដោយខ្លួនវាផ្ទាល់។ ពិនិត្យមើល Servo Monitor របស់ឧបករណ៍បញ្ជូន និងផ្ទៀងផ្ទាត់ថាដំបងនីមួយៗគ្រប់គ្រងតែឆានែលមួយ។
ស្តង់ដារជួសជុល Wing

- នៅពេលប្រើការបញ្ចូល aileron តែមួយ កំណត់មុខងារលទ្ធផលនៃ servos aileron ទាំងពីរទៅជា "AIL+AIL" ឬ "AIL+AIL2" ។ ប្រសិនបើ servo បញ្ច្រាសកំពុងត្រូវបានប្រើនៅផ្នែកម្ខាងនៃស្លាប បញ្ច្រាសវាដោយប្រើមុខងារ Servo Reverse នៃ gyro ។
- នៅពេលប្រើការបញ្ចូល aileron ពីរ កំណត់មុខងារលទ្ធផលនៃ servos aileron ពីរទៅ "AIL+AIL2" ។
- ដូចគ្នានេះដែរអនុវត្តចំពោះការតភ្ជាប់ servos ជណ្តើរយន្ត។
Flying Wing (Delta Wing)
- កំណត់មុខងារលទ្ធផលនៃ servos ទាំងពីរទៅជា "AIL+ELE"។ ប្រសិនបើ servo បញ្ច្រាសកំពុងត្រូវបានប្រើនៅផ្នែកម្ខាងនៃស្លាប បញ្ច្រាសវាជាមួយនឹងមុខងារ Servo Reverse របស់ gyro ។
- មុខងារ "AIL2" និង "ELE2" ត្រូវបានគ្រប់គ្រងដោយឡែកពីគ្នា ដែលអាចត្រូវបានប្រើសម្រាប់ Canards ឬគោលបំណងផ្សេងទៀត។
V-កន្ទុយ

- នៅពេលប្រើការបញ្ចូល aileron តែមួយ កំណត់មុខងារលទ្ធផលនៃ servos aileron ទាំងពីរទៅជា "AIL+AIL" ឬ "AIL+AIL2" ។ ប្រសិនបើ servo បញ្ច្រាសកំពុងត្រូវបានប្រើនៅផ្នែកម្ខាងនៃស្លាប បញ្ច្រាសវាជាមួយនឹងមុខងារ Servo Reverse របស់ gyro ។ នៅពេលប្រើការបញ្ចូល aileron ពីរ កំណត់មុខងារលទ្ធផលនៃ servos aileron ពីរទៅ "AIL + AIL2" ។
- កំណត់មុខងារលទ្ធផលនៃ servo កន្ទុយពីរទៅ "ELE + RUD" ប្រសិនបើ servo បញ្ច្រាសកំពុងត្រូវបានប្រើនៅផ្នែកម្ខាងនៃកន្ទុយ បញ្ច្រាសវាជាមួយនឹងមុខងារ Servo Reverse របស់ gyro ។
- មុខងារ "ELE2" ត្រូវបានគ្រប់គ្រងដោយឡែកពីគ្នា ដែលអាចត្រូវបានប្រើសម្រាប់ Canards ឬគោលបំណងផ្សេងទៀត។
ការគ្រប់គ្រងតែមួយ / Dual Aileron (ជណ្តើរយន្ត)
- gyro ដំណើរការក្នុងរបៀបគ្រប់គ្រង aileron តែមួយ នៅពេលដែលមានការភ្ជាប់ធាតុបញ្ចូល aileron តែមួយ។ ឆានែលទិន្នផលទាំងពីររបស់ AIL និង AIL2 ចេញសញ្ញាដូចគ្នាសម្រាប់ aileron servos ដូចជាអ្វីដែលការនាំមុខ Y-extended ដំណើរការ។ មុខងារ Servo Reverse ដែលផ្តល់ដោយ gyro អាចត្រូវបានប្រើដើម្បីបញ្ច្រាស servo នៅពេលដែល servo បញ្ច្រាសកំពុងត្រូវបានប្រើប្រាស់។
- gyro ដំណើរការនៅក្នុងរបៀបត្រួតពិនិត្យ aileron ពីរ ប្រសិនបើធាតុបញ្ចូលរបស់ aileron ទាំងពីរត្រូវបានភ្ជាប់ នៅក្នុងរបៀបនេះ ឆានែលទិន្នផលរបស់ AIL និង AIL2 ត្រូវបានដំណើរការដោយឡែកពីគ្នា។
- ដូចគ្នានេះដែរអនុវត្តចំពោះជណ្តើរយន្ត
ម៉ូដែលពន្លឺ
A3S4 ផ្តល់នូវរបៀបហោះហើរចំនួន 6 ដែលអាចប្តូរបានក្នុងរបៀប 3-position (ឬ 6-position mode) អំឡុងពេលហោះហើរ។ របៀបហោះហើរដែលរំពឹងទុកដែលទាក់ទងនឹងទីតាំងនីមួយៗនៃកុងតាក់អាចត្រូវបានបញ្ជាក់តាមរយៈឧបករណ៍កំណត់រចនាសម្ព័ន្ធ ឬកាតសរសេរកម្មវិធី។ ការកំណត់លំនាំដើមគឺបិទ - ធម្មតា - កម្រិតនៅក្នុងរបៀប 3 ទីតាំង។ ពណ៌របស់ LED បង្ហាញពីរបៀបហោះហើរបច្ចុប្បន្នរបស់ gyro ខណៈពេលដែលកំពុងប្រើប្រាស់។
តារាងទី 3៖ ពណ៌ LED នៃរបៀបហោះហើរ

- GYRO OFF M ode
នៅពេលដំណើរការនៅក្នុងរបៀប GYRO OFF ហ្គីរ៉ូនឹងត្រូវបានបិទទាំងស្រុង ហើយយន្តហោះនឹងស្ថិតនៅក្រោមការគ្រប់គ្រងទាំងស្រុងរបស់ឧបករណ៍បញ្ជូនរបស់អ្នកដូចមុននឹងដំឡើង gyro ។ របៀបនេះជាធម្មតាត្រូវបានប្រើសម្រាប់គោលបំណងសាកល្បងតែប៉ុណ្ណោះ។ - ធម្មតា M ode
របៀប NORMAL ដែលត្រូវបានគេស្គាល់ផងដែរថាជា 'របៀបអត្រា' គឺជាមុខងារមូលដ្ឋានបំផុតរបស់ gyro ។ វាដំណើរការដោយផ្អែកលើការត្រួតពិនិត្យអត្រាបង្វិលនៃអ័ក្សនីមួយៗនៃយន្តហោះ។ នៅពេលដំណើរការនៅក្នុងរបៀបនេះ gyro នឹងកែតម្រូវតែចលនាបង្វិលដែលកំពុងកើតឡើង ប្រតិកម្មមួយរំពេចនឹងត្រូវបានអនុវត្តចំពោះ servos នៅពេលដែលយន្តហោះបង្វិលនៅលើអ័ក្សដែលត្រូវគ្នា servos នឹងផ្លាស់ទីត្រឡប់ទៅទីតាំងអព្យាក្រឹតវិញភ្លាមៗនៅពេលដែលយន្តហោះឈប់បង្វិល។ មុខងារ NORMAL អាចប្រើបានជាមួយស្ទើរតែគ្រប់ទំហំ និងប្រភេទយន្តហោះ។ វាអាចធ្វើអោយប្រសើរឡើងនូវស្ថេរភាព និងភាពជាក់លាក់នៃយន្តហោះប្រកបដោយប្រសិទ្ធភាព និងកាត់បន្ថយការជាប់គាំងជាពិសេស។ - របៀបចាក់សោ
របៀប LOCK ត្រូវបានគេស្គាល់ផងដែរថាជា 'Attitude Lock mode', '3D mode' ឬ 'AVCS mode'។ ខុសពីរបៀបធម្មតា gyro នឹងធ្វើការកែតម្រូវជាអចិន្ត្រៃយ៍សម្រាប់ចលនាបង្វិលនៅលើអ័ក្សនីមួយៗជានិច្ច។ នោះគឺជាពេលដែលអ្នកបញ្ចេញដំបង យន្តហោះនឹងឈប់ ហើយកាន់ទីតាំងបច្ចុប្បន្នរបស់វាភ្លាមៗ។ របៀបនេះគឺស័ក្តិសមសម្រាប់ការអនុវត្តសមយុទ្ធ 3D ជាមូលដ្ឋានដូចជាការលោត ឬគែមកាំបិត។ ដោយសារវាអាចជួយអ្នកក្នុងការចាក់សោឥរិយាបថរបស់យន្តហោះ វាក៏មានប្រយោជន៍សម្រាប់ការចុះចតផងដែរ។ - របៀប ANGLE (អតីតគ្រូបង្វឹក
របៀប ANGLE ដែលត្រូវបានគេស្គាល់ថាជា 'ទម្រង់គ្រូបង្ហាត់' ឬ 'របៀបអាកប្បកិរិយា' នឹងកំណត់មុំអតិបរមានៃយន្តហោះនៅលើអ័ក្សវិល និងអ័ក្ស។ រំកិល និងរង្វិលជុំមិនត្រូវបានអនុញ្ញាតនៅក្នុងរបៀបនេះទេ យន្តហោះនឹងមានស្ថេរភាពគ្រប់ពេលវេលា ដោយមិនមានការបញ្ចូលដំបងណាមួយឡើយ។ នេះរារាំងយន្តហោះពីការផ្អៀងចូលទៅក្នុងមុំធំជាង ដែលអាចបណ្តាលឱ្យមានគ្រោះថ្នាក់។ ដរាបណាដំបងត្រូវបានបញ្ចេញ យន្តហោះនឹងត្រូវបាននាំត្រឡប់ទៅទីតាំងផ្ដេកដោយស្វ័យប្រវត្តិ។ អ្នកអាចប្រើរបៀបនេះជាការសង្គ្រោះបន្ទាន់ ឬក្នុងកម្មវិធីផ្សេងទៀត ឧទាហរណ៍ ដើម្បីមានការបណ្តុះបណ្តាលសម្រាប់អ្នកចាប់ផ្តើមថ្មី ឬដើម្បីប្រើសម្រាប់ FPV។ មុំអនុញ្ញាតអតិបរមានៃរបៀបនេះអាចត្រូវបានបញ្ជាក់តាមរយៈឧបករណ៍កំណត់រចនាសម្ព័ន្ធ ឬកាតសរសេរកម្មវិធី។ - របៀបកម្រិត
របៀប LEVEL ត្រូវបានគេស្គាល់ផងដែរថាជា 'របៀបកម្រិតស្វ័យប្រវត្តិ', 'របៀបតុល្យភាពស្វ័យប្រវត្តិ' ឬ 'របៀបផ្តេក' ។ នៅពេលដំណើរការក្នុងរបៀបនេះ យន្តហោះនឹងត្រូវបាននាំទៅទីតាំងផ្ដេកដោយស្វ័យប្រវត្តិ នៅពេលអ្នកបញ្ចេញបន្ទះឈើ។ ខុសពីរបៀប ANGLE មិនមានការកំណត់មុំអតិបរមានៅក្នុងរបៀបនេះទេ ហើយយន្តហោះនឹងមានស្ថេរភាពលុះត្រាតែមិនមានការបញ្ចូលវត្ថុបញ្ជាជាក់លាក់ពី aileron និងដំបងជណ្តើរយន្ត។ របៀបនេះអាចប្រើបាន ប្រសិនបើអ្នកបើកយន្តហោះមានបញ្ហា ហើយចង់ជួយសង្គ្រោះយន្តហោះពីការធ្លាក់។ - របៀប HOVER
របៀប HOVER ដែលត្រូវបានគេស្គាល់ថាជា 'Auto-Hover mode' ផ្តល់នូវមុខងារដូចគ្នាទៅនឹងរបៀប LEVEL ។ ភាពខុសប្លែកគ្នាតែមួយគត់គឺថា នៅពេលអ្នកបញ្ចេញដំបង យន្តហោះនឹងត្រូវបាននាំទៅទីតាំងបញ្ឈរ (ច្រមុះឡើងលើ) ហើយបន្តហោះ។ របៀបនេះត្រូវបានរចនាឡើងដើម្បីជួយអ្នកឱ្យរៀនធ្វើចលនាលើដី និងកាត់បន្ថយប្រូបាប៊ីលីតេនៃការគាំង។ - អ្នកប្រើ M ode
របៀបកំណត់ដោយអ្នកប្រើប្រាស់អនុញ្ញាតឱ្យអ្នកសម្រេចចិត្តថាតើរបៀបហោះហើរណាមួយដែលត្រូវប្រើនៅលើអ័ក្សនីមួយៗដោយឡែកពីគ្នា។ សូមចំណាំថារបៀប HOVER មិនមានសម្រាប់របៀបអ្នកប្រើប្រាស់ទេ។
ការដំឡើងកុងតាក់របៀបហោះហើរ
អ្នកអាចប្រើកុងតាក់ 3 ទីតាំងណាមួយរបស់ឧបករណ៍បញ្ជូន ដើម្បីប្តូររបៀបហោះហើរ។ វិធីសាមញ្ញបំផុតគឺប្រើ Gear Channel ហើយភ្ជាប់វាទៅ [Serial RX/M] slot នៃ gyro ។ ដើម្បីធ្វើឱ្យ gyro អាចកំណត់ទីតាំងត្រឹមត្រូវ ការបញ្ចូល PWM ត្រូវតែបំពេញតាមតម្រូវការនៃជួរដូចបានបង្ហាញខាងក្រោម៖
A3S4 ក៏គាំទ្រការប្តូររបៀបហោះហើរ 6 ទីតាំងផងដែរ ដែលអនុញ្ញាតឱ្យអ្នកប្តូររបៀបហោះហើរទាំងអស់នៅក្នុងការហោះហើរ។ ដើម្បីធ្វើដូច្នេះ មុខងារលាយនៃកុងតាក់ 2 ទីតាំងមួយ និងកុងតាក់ 3 ទីតាំងមួយត្រូវបានទាមទារនៅលើឧបករណ៍បញ្ជូនរបស់អ្នក។ ដើម្បីធ្វើឱ្យ gyro អាចកំណត់ទីតាំងត្រឹមត្រូវ ការបញ្ចូល PWM ត្រូវតែបំពេញតាមតម្រូវការនៃជួរដូចបានបង្ហាញខាងក្រោម៖
ដើម្បីសម្រេចបាននូវកុងតាក់តក្កវិជ្ជា 6 ទីតាំង ឧបករណ៍បញ្ជូនរបស់អ្នកត្រូវការដើម្បីគាំទ្រមុខងារលាយកម្មវិធី វិទ្យុកម្រិតខ្ពស់បំផុតផ្តល់ឱ្យអ្នកនូវលក្ខណៈពិសេសបែបនេះ។ សូមយោងទៅរបស់យើង។ webគេហទំព័រសម្រាប់ឧamples អំពីរបៀបរៀបចំការលាយសម្រាប់វិទ្យុពេញនិយមមួយចំនួន។
ទទួលបានការកែតម្រូវ
ប្រាក់ចំណេញមូលដ្ឋាន
A3S4 ផ្តល់នូវការលៃតម្រូវដាច់ដោយឡែកនៃការកើនឡើងជាមូលដ្ឋាននៅលើ aileron ជណ្តើរយន្ត និង rudder ។ ការកើនឡើងជាមូលដ្ឋានកំណត់កម្លាំងប្រតិកម្មរបស់ gyro ។ ជាទូទៅ ការកើនឡើងកាន់តែខ្ពស់ យន្តហោះកាន់តែពិបាកបន្ទាប់ពីបង្វិល ហើយយន្តហោះនឹងមានស្ថេរភាព និងច្បាស់លាស់ជាងមុន។ ប៉ុន្តែប្រសិនបើការកើនឡើងខ្ពស់ពេក យន្តហោះនឹងមានទំនោរទៅយោលនៅប្រេកង់ខ្ពស់នៅលើអ័ក្សដែលត្រូវគ្នា។ ប្រសិនបើតូចពេក ប្រតិបត្តិការ និងស្ថេរភាពនឹងមិនសូវល្អទេ ហើយយន្តហោះមិនឈប់ច្បាស់លាស់ និងជ្រុល។ gyro នឹងត្រូវបានបិទដំណើរការទាំងស្រុង ប្រសិនបើអ្នកកំណត់ការកើនឡើងជាមូលដ្ឋានដល់ 0%។ សម្រាប់ការធ្វើតេស្តហោះហើរលើកដំបូង វាត្រូវបានណែនាំអោយចាប់ផ្តើមជាមួយនឹងការកំណត់ការទទួលបានមូលដ្ឋានទាប (ឧ. 30%) ហើយប្តូរ gyro ទៅរបៀប NORMAL ។ ក្នុងករណីដែលយន្តហោះចាប់ផ្តើមលំយោល បន្ទាប់មកកាត់បន្ថយការទទួលបានអ័ក្សដែលត្រូវគ្នា។ ប្រសិនបើការគ្រប់គ្រងមានអារម្មណ៍ថាខ្សោយ និងមិនច្បាស់លាស់ ហើយមិនកាន់ទីតាំងនៅពេលឈប់ បន្ទាប់មកបង្កើនការចំណេញ យោងតាមវិធីសាស្រ្តនេះ សូមសម្រួលការទទួលបានជាមូលដ្ឋានរហូតដល់អ្នកទទួលបានលទ្ធផលល្អបំផុត។
របៀបទទួលបាន
លើសពីនេះ ការទទួលបាន gyro នៃអ័ក្សនីមួយៗក៏អាចត្រូវបានកែតម្រូវដោយឡែកពីគ្នាសម្រាប់របៀបហោះហើរនីមួយៗ រួមទាំង Lock Gain, Angle Gain, Level Gain និង Hover Gain ជាធម្មតាការបង្កើនទាំងនេះត្រូវបានប្រើបន្ទាប់ពីការកើនឡើងជាមូលដ្ឋានត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវ ហើយនឹងដំណើរការតែជាមួយ របៀបហោះហើរដែលត្រូវគ្នា។
ការទទួលបាន Master ពីចម្ងាយ
ការទទួលបានមេពីចម្ងាយត្រូវបានប្រើដើម្បីផ្លាស់ប្តូរការទទួលបានជាមូលដ្ឋាននៃ aileron, ជណ្តើរយន្ត និង rudder ក្នុងពេលតែមួយក្នុងការហោះហើរ។ ដោយប្រើដងថ្លឹងនៅលើឧបករណ៍បញ្ជូន អត្រានៃការទទួលបានអាចត្រូវបានថយចុះតាមលីនេអ៊ែរពី 100% ទៅ 0% អ្នកក៏អាចប្រើកុងតាក់ 3 ទីតាំងដើម្បីទទួលបានជម្រើស 3 អត្រានៃការទទួលបានផងដែរ។ ការទទួលបានមេពីចម្ងាយនឹងតែងតែលំនាំដើមទៅ 100% ប្រសិនបើអ្នកមិនភ្ជាប់ឆានែលនេះ។
ទិសដៅ GYRO
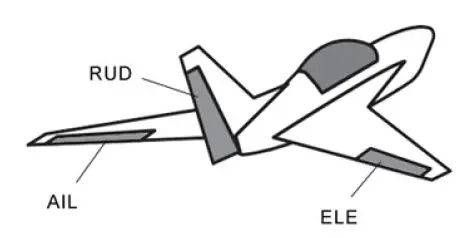
បន្ទាប់ពីដំឡើងរួច លើកយន្តហោះឡើងលើ ហើយធ្វើឱ្យវាបង្វិលយ៉ាងលឿនជុំវិញអ័ក្សវិល ជម្រេ និងអ័ក្សយ៉ាវរៀងៗខ្លួន។ ត្រូវប្រាកដថាផ្ទៃវត្ថុបញ្ជាទាំងអស់មានប្រតិកម្មក្នុងទិសដៅត្រឹមត្រូវដែលយោងទៅលើតួលេខខាងក្រោម។
សំខាន់ណាស់!
វាមានសារៈសំខាន់ខ្លាំងណាស់ក្នុងការធ្វើឱ្យប្រាកដថា gyro មានប្រតិកម្មក្នុងទិសដៅត្រឹមត្រូវនៅលើអ័ក្សនីមួយៗមុនពេលហោះហើរ។ ប្រតិកម្មផ្ទុយរបស់ gyro អាចនាំឱ្យបាត់បង់ការគ្រប់គ្រង ឬសូម្បីតែគាំង!
ពិនិត្យមើលទិសដៅ gyro សម្រាប់ Aileron
បង្វិលយន្តហោះយ៉ាងលឿនទៅឆ្វេង ឬស្តាំជុំវិញអ័ក្សវិល អ្នកបើកយន្តហោះគួរមានប្រតិកម្មក្នុងទិសដៅដែលរំពឹងទុកដូចបានបង្ហាញខាងក្រោម។
ពិនិត្យមើលទិសដៅ gyro សម្រាប់ជណ្តើរយន្ត
បង្វិលយន្តហោះឡើងលើ ឬចុះក្រោមយ៉ាងលឿនជុំវិញអ័ក្សជណ្ដើរ ជណ្តើរយន្តគួរមានប្រតិកម្មក្នុងទិសដៅដែលរំពឹងទុកដូចបានបង្ហាញខាងក្រោម។
ពិនិត្យមើលទិសដៅ gyro សម្រាប់ Rudder
បង្វិលយន្តហោះយ៉ាងលឿនទៅឆ្វេង ឬស្តាំជុំវិញអ័ក្សយ៉ាវ ឈ្នាន់គួរមានប្រតិកម្មក្នុងទិសដៅដែលរំពឹងទុកដូចបានបង្ហាញខាងក្រោម។
ការក្រិតកម្រិតនិងលោត
នៅពេលហោះហើរក្នុងរបៀប ANGLE ឬ LEVEL mode gyro ត្រូវការដឹងពីមុំរបស់យន្តហោះទាំងក្នុងទិសដៅវិល និងទិសដៅ វាត្រូវបានសម្រេចដោយការគណនាអាកប្បកិរិយារបស់វា។ គម្លាតមុំតូចមួយដែលបណ្តាលមកពីការដំឡើងអាចនាំឱ្យមានអាកប្បកិរិយាដែលមិនរំពឹងទុកនៅពេលហោះហើរក្នុងរបៀប ANGLE ឬ LEVEL mode។ សម្រាប់ហេតុផលនេះ ការក្រិតតាមកម្រិតមួយត្រូវបានណែនាំដើម្បីទូទាត់កំហុសដែលបណ្តាលមកពីការដំឡើង និងបង្កើតការយោងកម្រិតត្រឹមត្រូវនៃយន្តហោះបន្ទាប់ពីដំឡើង gyro ។
- មុននឹងធ្វើការក្រិតតាមខ្នាត យន្តហោះត្រូវដាក់នៅលើដីផ្តេក ហើយធ្វើឱ្យស្លាបស្របទៅនឹងដី។ ធ្វើឱ្យយន្តហោះឡើងលើបន្តិច ព្រោះជាធម្មតាតម្រូវឱ្យមុំកម្ពស់ជាក់លាក់មួយ ដើម្បីរក្សាកម្រិតនៃការហោះហើរសម្រាប់យន្តហោះភាគច្រើន។
- ចុចប៊ូតុង Level Calibration នៅលើផ្ទាំង Sensor របស់ Configurator ដើម្បីចាប់ផ្តើមការក្រិតតាមខ្នាត។ ដំណើរការក្រិតខ្នាតទាំងមូលនឹងចំណាយពេលអ្នកជាច្រើនវិនាទី ហើយ LED នឹងលោតពណ៌ខៀវយ៉ាងឆាប់រហ័សក្នុងកំឡុងពេលក្រិតខ្នាត។ កុំរំកិលយន្តហោះរហូតដល់ការក្រិតតាមខ្នាតរួចរាល់។
- បន្ទាប់ពីការក្រិតតាមខ្នាតដោយជោគជ័យ លទ្ធផលនឹងត្រូវបានរក្សាទុក និងបង្ហាញនៅលើអេក្រង់ អ្នកអាចកែតម្រូវវាដោយដៃនាពេលអនាគត។ ប្រសិនបើអ្នកមានការភ្លឹបភ្លែតៗពណ៌ក្រហមយ៉ាងរហ័សកំឡុងពេលក្រិត នេះមានន័យថាលទ្ធផលលើសពីតម្លៃដែលអាចអនុញ្ញាតបានអតិបរមា (ឧទាហរណ៍ ±25deg) ក្នុងករណីនេះអ្នកត្រូវដំឡើង gyro ឡើងវិញដើម្បីកាត់បន្ថយគម្លាតដែលបណ្តាលមកពីការដំឡើង។
ជាហេតុផលដូចគ្នា ការក្រិតតាមខ្នាតដាក់សំកុកត្រូវបានផ្ដល់អនុសាសន៍ឱ្យអនុវត្តបន្ទាប់ពីការដំឡើងប្រសិនបើអ្នកចង់ហោះហើរដោយប្រើរបៀប HOVER។ នីតិវិធីគឺស្រដៀងគ្នាទៅនឹងការក្រិតតាមខ្នាត។ ភាពខុសគ្នាតែមួយគត់គឺថា យន្តហោះគួរតែត្រូវបានលើកបញ្ឈរទៅដី ជំនួសឱ្យការដាក់វានៅលើដីក្នុងជំហានទី 1 ។
កាលីហ្វ័រញ៉ា ACCELEROMETER
gyro នីមួយៗត្រូវបានធ្វើតេស្ត និងក្រិតតាមខ្នាតយ៉ាងប្រុងប្រយ័ត្ន មុនពេលចាកចេញពីរោងចក្រ។ ជាធម្មតា អ្នកមិនចាំបាច់ធ្វើការក្រិតតាមខ្នាតសម្រាប់ឧបករណ៍វាស់ល្បឿនម្តងទៀតទេ។ ទោះយ៉ាងណាក៏ដោយ ក្នុងករណីជាក់លាក់មួយចំនួន យើងនឹងស្នើឱ្យអ្នកធ្វើការក្រិតឧបករណ៍វាស់ល្បឿនឡើងវិញ ដើម្បីទទួលបានដំណើរការប្រសើរជាងមុន ទាំងនេះរួមមានការផ្លាស់ប្តូរសីតុណ្ហភាព ដែលប្រហែលជាបណ្តាលឱ្យមានការផ្លាស់ប្តូរលក្ខណៈមេកានិចនៃឧបករណ៏ ឬការជំនួសឧបករណ៍ចាប់សញ្ញាថ្មីជាដើម។ ការក្រិតតាមខ្នាតគួរតែជា បានធ្វើនៅលើផ្ទៃតុផ្តេក ហើយ gyro ត្រូវតែដកចេញពីយន្តហោះជាមុនសិន។ ដំណើរការក្រិតតាមខ្នាត ភ្ជាប់ gyro ទៅកុំព្យូទ័រ ហើយរង់ចាំរហូតដល់ការចាប់ផ្តើមត្រូវបានបញ្ចប់។ បើកកម្មវិធីកំណត់រចនាសម្ព័ន្ធ ហើយចូលទៅកាន់ផ្ទាំង Sensor -> Accelerometer Calibration ចុចប៊ូតុង Calibrate។ ធ្វើតាមការណែនាំ ហើយបំពេញ 6 ជំហានបន្ទាប់ កុំផ្លាស់ទី gyro ខណៈពេលដែលការក្រិតតាមខ្នាតនៅជំហាននីមួយៗ។
ការកំណត់កម្រិតខ្ពស់
Stick Deadband
បន្ទះឈើងាប់គឺជាជួរជុំវិញកណ្តាលនៃដំបងដែល gyro នឹងមិនប្រតិកម្ម។ ឧបករណ៍បញ្ជូនខ្លះមានបញ្ហាដែលនៅពេលដែលដំបងត្រូវបាននាំយកមកវិញបន្ទាប់ពីការបញ្ចូល ពួកវាមិនច្បាស់នៅទីតាំងកណ្តាលដូចពីមុន ដែលអាចបង្កើតគម្លាតនៅលើមុខងារដែលត្រូវគ្នា ក្នុងលក្ខខណ្ឌនេះ អ្នកអាចបង្កើនការកំណត់នៃបន្ទះឈើ។ ដើម្បីជួសជុលវា។ ជួរលៃតម្រូវនៃក្រុមតន្រ្តីស្លាប់គឺ 0% ទៅ 20%, លំនាំដើម 5% គឺសមសម្រាប់វិទ្យុភាគច្រើនដោយគ្មានការកែប្រែ។
ប្រេកង់ Servo
កំណត់ប្រេកង់ការងារសម្រាប់ servos ។ អាណាឡូក servos អាចដំណើរការបានតែ 50Hz ប៉ុណ្ណោះ ប្រេកង់ខ្ពស់អាចបណ្តាលឱ្យខូច servos ។ ពិនិត្យមើលលក្ខណៈបច្ចេកទេសរបស់ servo មុនពេលបង្កើនការកំណត់ ប្រសិនបើអ្នកមិនដឹងថាតើអត្រាអាប់ដេតអតិបរិមាដែលត្រូវបានអត់ឱនដោយ servo របស់អ្នកមិនប្រើលើសពី 50Hz ទេ។ តាមទ្រឹស្តី ប្រេកង់ការងាររបស់ servos កាន់តែខ្ពស់ ដំណើរការល្អរបស់ gyro អាចទទួលបាន ប៉ុន្តែវាអាចបង្កើនការប្រើប្រាស់ថាមពល និងបណ្តាលឱ្យមានកំដៅនៃ servos ។ ការកំណត់នេះនឹងប៉ះពាល់ដល់ប៉ុស្តិ៍ទិន្នផលទាំងអស់ រួមទាំង AUX1 និង AUX2។
ទទួលបានកម្រិត L
ផ្លាស់ប្តូរកម្រិតនៃការទទួលបានជាមូលដ្ឋាន លំនាំដើម "មធ្យម" គឺសមសម្រាប់យន្តហោះភាគច្រើន។
គ្រប់គ្រងឥរិយាបថ
បន្ទាប់ពីដំឡើង gyro យន្តហោះនឹងមានស្ថេរភាពជាងមុន ប៉ុន្តែមិនសូវមានប្រតិកម្មទេ ដោយសារតែការកែតម្រូវ gyro ។ ដើម្បីកែលម្អយើងត្រូវកាត់បន្ថយកម្លាំងកែតម្រូវរបស់ gyro នៅលើទិសដៅដែលចង់បានថាមវន្តនៅពេលដែលមានធាតុបញ្ចូលនៃបន្ទះឈើ។ មុខងារនេះអនុញ្ញាតឱ្យអ្នកផ្លាស់ប្តូរឥរិយាបទគ្រប់គ្រងដោយជ្រើសរើសខ្សែកោងផ្សេងគ្នានៃការកាត់បន្ថយការទទួលបាន។
តម្រងឌីជីថល Gyro
មុខងារនេះត្រូវបានប្រើដើម្បីដំឡើងប្រេកង់កាត់ចេញនៃ hardware low pass filter របស់ gyro។ ការកាត់បន្ថយប្រេកង់អាចកាត់បន្ថយយ៉ាងខ្លាំងនូវការរំខាននៃរំញ័រពីតួយន្តហោះ។ តាមរយៈការធ្វើតេស្ត ការកំណត់លំនាំដើម DLPF_20Hz គឺសមសម្រាប់យន្តហោះអគ្គិសនីភាគច្រើន។ បន្ថយវាឱ្យសមស្របនៅពេលដែលរំញ័រខ្លាំង វាត្រូវបានណែនាំឱ្យជ្រើសរើស DLPF_5Hz នៅពេលប្រើ gyro នៅលើយន្តហោះ nitro ឬសាំង។ សូមចំណាំថាការកំណត់ប្រេកង់កាត់ខ្ពស់អាចបង្កើនការប្រើប្រាស់ថាមពល និងបង្កឱ្យមានកំដៅនៃ servos ។
កម្មវិធី
ដើម្បីដំឡើង gyro ទាញយក និងដំឡើង HobbyEagle A3 Configurator ចុងក្រោយបង្អស់ និងកម្មវិធីបញ្ជា USB ពីរបស់យើង webគេហទំព័រ https://www.hobbyeagle.com/a3-configurator/
- កម្មវិធីនេះគាំទ្រ Windows XP, Windows 7, Windows 8 និង Windows 10 (32 ឬ 64 ប៊ីត) ។
- ប្រសិនបើការដំឡើងបរាជ័យ សូមទាញយក និងដំឡើង Microsoft .NET Framework 4 ជាមុនសិន។
- ដំឡើងកម្មវិធីបញ្ជា USB (CP210X_VCP) មុនពេលភ្ជាប់ gyro ទៅកុំព្យូទ័រ។
ឯកសារពាក់ព័ន្ធ
ការណែនាំអំពីការដំឡើង https://www.hobbyeagle.com/a3-configurator/docs/installation_guide_en.pdf
ការណែនាំអំពីការដំឡើងកម្មវិធីបញ្ជា USB https://www.hobbyeagle.com/a3-configurator/docs/usb_installation_guide_en.pdf
មគ្គុទ្ទេសក៍ចាប់ផ្តើមរហ័ស https://www.hobbyeagle.com/a3-configurator/docs/quick_start_guide_en.pdf
ការណែនាំអំពីការធ្វើបច្ចុប្បន្នភាពកម្មវិធីបង្កប់ https://www.hobbyeagle.com/a3-configurator/docs/firmware_update_guide_en.pdf
សំខាន់ណាស់!
- ប្រើអាដាប់ទ័រ USB ពិសេស និងខ្សែទិន្នន័យដែលរួមបញ្ចូលក្នុងកញ្ចប់ជានិច្ច ខណៈពេលដែលភ្ជាប់ gyro ទៅកុំព្យូទ័រ ឬកាតសរសេរកម្មវិធី។ ខ្សែ USB ធម្មតាសម្រាប់ទូរស័ព្ទដៃ ឬផលិតផលផ្សេងទៀតនឹងមិនដំណើរការជាមួយ gyros របស់យើងទេ!
- វាត្រូវបានផ្ដល់អនុសាសន៍ឱ្យប្រើ Program Card X ថ្មីសម្រាប់ A3 Super 4 ហើយរក្សាកម្មវិធីបង្កប់ឱ្យទាន់សម័យទៅកំណែចុងក្រោយបំផុត។
ភាពជាក់លាក់

ឯកសារ/ធនធាន
 |
HOBBYEAGLE A3 Super 4 Flight Controller 6-Axis Gyro and Stabilization Balancer Full Set Programming Card for RC Airplane [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ A3 Super 4 Flight Controller 6-Axis Gyro and Stabilization Balancer Full Set Programming Card for RC Airplane, A3 Super 4, Flight Controller 6-Axis Gyro and Stabilization Balancer Full Set Programming Card for RC Airplane |



