HOBBYEAGLE A3 Super 4 Flig RC Airplane

Grazie per avè acquistatu i nostri prudutti. A3 Super 4 hè un giroscopiu è stabilizzatore à 6 assi d'altu rendiment è funziunale cuncepitu per aerei R/C. Per fà u megliu usu di u gyro è per vola in modu sicuru, leghjite attentamente stu manuale d'istruzzioni è cunfigurà u dispusitivu cum'è descrittu quì sottu.
NOTE IMPORTANTI
- I mudelli radiocontrollati (R/C) ùn sò micca ghjoculi! L'elice giranu à alta velocità è ponu risicu potenziale. Puderanu causà ferite severi per un usu impropriu. Hè necessariu di rispettà e regule di sicurezza cumuni per i mudelli R/C è a lege locale. Leghjite attentamente e seguenti struzzioni prima di u primu usu di i vostri gyros è cunfigurate u gyro cun cura secondu stu manuale. Hè cunsigliatu ancu di circà l'assistenza di un pilotu espertu prima di pruvà à vola cù i nostri gyros per a prima volta!
- Dopu l'accensione, u gyro deve esse realizatu una calibrazione precisa di u giroscopiu, mantene l'aviò stazionariu dopu l'accensione è aspetta mentre u LED lampeghja blu. U LED resterà blu solidu se un ligeru muvimentu hè rilevatu è a calibrazione ùn principiarà micca finu à chì ùn si ferma micca di muvimenti l'aviò, però, rende u livellu di l'aviò ùn hè micca necessariu durante l'inizializazione.
- Un centramentu di bastone hè ancu necessariu dopu a calibrazione di u giroscopiu. Sempre mette tutti i bastoni centru (u throttle stick in a pusizioni più bassu) prima di u putere nantu à l'aviò, è ùn move micca i bastoni finu à chì l'inizializazione hè fatta. Le centrage du manche s'applique uniquement aux canaux Aileron, Elevator, Rudder, Aileron 2 et Elevator 2. Assicuratevi di verificà a direzzione di u giroscopiu di Aileron, Elevator and Rudder dopu a stallazione è sempre fà una prova di elli prima di ogni volu. Una reazione opposta di u gyro puderia purtà à perde u cuntrollu o ancu crash!
- Hè cunsigliatu di utilizà u condensatore 3300uF / 16V furnitu per ottene un volu di travagliu più stabile è sicuru.tage dopu a stallazione di u gyro. U condensatore pò esse cunnessu à qualsiasi cunnessu liberu di u gyro o di u receptore.
INSTALLAZIONE
NOTE
- Ùn aduprate mai cola calda o ligami di nylon per fixà u gyro à l'aviò!
- Avete bisognu di solu un pezzu di cinta à doppia faccia ogni volta, un tipu di muntatura chì hè troppu suave o troppu grossu pò influenzà u rendiment di u gyro.
- U gyro hè un dispositivu di sensazione, fate abbastanza spaziu intornu à u gyro è mantene u gyro u più luntanu pussibule da altri apparecchi elettronichi o fili.
Orientazione di Montaggio
Aduprate unu di i nastri bifacciali furniti per attaccà fermamente u gyro à l'aviò. Per u megliu rendimentu, u gyro deve esse muntatu u più vicinu à u CG pussibule, è i bordi di l'abitazioni devenu esse allinati esattamente paralleli à tutti i trè assi di rotazione di l'aviò. U gyro pò esse appiccicatu pianu o drittu, è ancu à l'inversu, però, duvete assicurà chì a freccia nantu à l'autocollante punta sempre à a direzzione di l'intestazione, altrimenti, u gyro ùn funziona micca nurmale in i modi ANGLE, LEVEL è HOVER.
CUNNESSIONE DI RECEIVER
Ricevitore PWM standard
Quandu si usa un ricevitore PWM standard, A3S4 hà 7 canali d'ingressu in quale almenu un canale deve esse cunnessu à u ricevitore in Aileron (A), Elevator (E) è Rudder (R), o u gyro entre in u modu di timeout di u ricevitore ( Rossu lampeggiante lento). A descrizzione di i canali di input sò mostrati in a tabella chì seguita.
NOTE
- [Serial RX/M] hè utilizatu per u cambiamentu di modu di volu, utilizate un interruttore di 3 pusizioni di u trasmettitore per cambià u modu di volu durante u volu.
- [G] hè utilizatu per u cuntrollu di guadagnu maestru remotu, una leva di scorrimentu o un interruttore di u trasmettitore pò esse usatu per sintonizà o cambià u guadagnu maestru durante u volu.
- Cunnette l'ESC o u servo di l'acceleratore direttamente à u ricevitore senza passà per u gyro.
- I pin in slot [AER] è [A2-E2-G] sò usati solu cum'è pin d'ingressu di signale, MAI cunnette una fonte d'energia in questi pin.
- Attenti à a polarità di i tappi. A linea di signale aranciu deve esse sempre nantu à a cima è u marrone in u fondu.
Ricevitore una sola linea
A3S4 supporta PPM è ricevitori seriali digitali multiprotocolu chì vi permette di cunnette u ricevitore à u gyro cù un filu unicu in u slot [Serial RX/M]. Quandu si usanu ricevitori à linea unica, 2 canali ausiliari di pass-through (AUX1 è AUX2) sò dispunibuli chì ponu esse aduprati per emette direttamente i canali previsti di u ricevitore. Per automaticamente, AUX1 hè sempre assignatu à Throttle è si applica à OUT5, mentri AUX2 hè disattivatu. Quandu opera in modu di una sola linea, u gyro usa l'assignazione di canali predeterminati per ricunnosce i canali da u ricevitore. Per piacè verificate se a mappa di u canali attuale currisponde à l'ordine di u canali di u vostru trasmettitore via u configuratore o a carta di prugrammazione. Dopu ogni volta chì avete cambiatu u tipu di ricevitore, pudete sceglie sia per resettate i canali, sia per mantene e paràmetri esistenti. Sceglite "Nisunu" per quelli canali chì ùn utilizate micca.
Tabella 1: Protokolli Serial Receiver Supportati è Assegnazione di Canali Predeterminati

NOTE
- Per piacè nutate chì i canali di input di ELE2, GAIN è AUX2 sò disattivati in modu di linea unica per difettu. Per attivà questi canali, avete bisognu di specificà i numeri di canali per elli via u cunfiguratore o a carta di prugrammazione.
- Attenti à a polarità di i tappi. A linea di signale aranciu deve esse sempre nantu à a cima è u marrone in u fondu.
- Un adattatore o cunvertitore opzionale speciale hè necessariu se vulete usà un ricevitore satellitare Spektrum (remotu) o un receptore remoto SRXL2.
Ricevitore satellitare Spektrum DSM2/X
Utilizendu l'adattatore DSM, un receptore satellitare Spektrum (remota) pò esse cunnessu direttamente à u gyro.

Ricevitore Spektrum SRXL2
Utilizendu l'Adapter SRXL2, A3S4 supporta l'ultimi ricevitori seriali SRXL2 di Spektrum, cum'è SPM4651T, SPMAR8020T, etc. Per piacè nutate chì u tipu di ricevitore di u gyro deve esse stallatu in modu SBUS quandu si usa l'Adapter SRXL2.
À propositu di Failsafe
- Receiver Failsafe A maiò parte di i ricevitori entreranu in modu Failsafe in casu di perdita di signale da u trasmettitore. In tali cundizioni, u gyro beneficerà di e funzioni native Failsafe / Hold di u ricevitore. Assicuratevi sempre chì i paràmetri Failsafe sò cunfigurati bè in u trasmettitore.
- Gyro Failsafe U gyro furnisce ancu a funzione Failsafe à livellu di gyro quandu a cunnessione falla da u ricevitore. Quandu a funzione hè attivata, u LED continuarà à lampassi in Rossu lentamente è tutti i servos si moveranu à e so pusizioni iniziali à l'iniziu, cumpresi i canali AUX1 è AUX2, u gyro passerà in modu Normale automaticamente è u guadagnu maestru remoto serà disattivatu.
CONNESSIONE OUTPUT
Funzioni di output
A3S4 furnisce 5 canali di output PWM persunalizati, cumprese OUT1 à OUT5, di quale a funzione pò esse specificata da l'utilizatore. E funzioni dispunibuli sò mostrate in a tabella sottu.
Table 2: Funzioni di Output

Note:
sò i paràmetri predeterminati di u modu di ricevitore PWM standard. AUX1 è AUX2 sò tramindui invalidi in u modu standard di ricevitore PWM. OUT5 hè sempre presettatu per emette u canali AUX1 in PPM o in modu di ricevitore seriale per difettu.
Servo inversu
A funzione Servo Reverse hè pensata per aduprà per i servos inversi, per esample, quandu upirari lu gyro in modu di cuntrollu unicu aileron cù dui servos aileron culligatu, ùn sarà impussibile à inversà i servos siparati s'è un servo inversa hè esse usatu nant'à un latu di l 'ala. In questu casu, a funzione Servo Reverse furnita da u gyro facilita a cambià a direzzione di unu di i servos. U stessu s'applica ancu à l'applicazioni cum'è dui servos d'elevatore, dui servos d'ala di una ala delta o dui servos di cuda di un avion à coda in V.
U tipu d'ala è a cunnessione servo
L'A3S4 supporta l'ala fissa standard, l'ala volante (ala delta) è a coda in V. Spegne sempre a funzione di mistura di l'ala delta o a coda in V in u trasmettitore perchè u gyro furnisce tali funzioni di mistura da ellu stessu. Verificate u Servo Monitor di u trasmettitore è verificate chì ogni bastone cuntrolla solu un canale.
Ala fissa standard

- Quandu si usa l'input unicu di l'alettone, stabilisce a funzione di output di i dui servo di l'alettone à "AIL + AIL" o "AIL + AIL2". Se un servo inversu hè utilizatu in un latu di l'ala, invertite cù a funzione Servo Reverse di u gyro.
- Quandu si usa l'input duale di l'alettone, stabilisce a funzione di output di i dui servo di l'alettone à "AIL + AIL2".
- U stessu hè applicà à a cunnessione di servos di l'elevatore.
Ala volante (Aile Delta)
- Pone a funzione di output di i dui servos à "AIL + ELE". Se un servo inversu hè utilizatu in un latu di l'ala, invertite cù a funzione Servo Reverse di u gyro.
- E funzioni "AIL2" è "ELE2" sò cuntrullati separatamente chì ponu esse aduprati per Canards o altri scopi.
Coda in V

- Quandu s'utilice l'input unicu di l'alettone, stabilisce a funzione di output di i dui servo di l'alettone à "AIL + AIL" o "AIL + AIL2". Se un servo inversu hè utilizatu in un latu di l'ala, invertite cù a funzione Servo Reverse di u gyro. Quandu si usa l'input duale di l'alettone, stabilisce a funzione di output di i dui servo di l'alettone à "AIL + AIL2".
- Pone a funzione di output di i dui servos di coda à "ELE + RUD", se un servo inversu hè utilizatu da un latu di a cuda, invertite cù a funzione Servo Reverse di u gyro.
- A funzione "ELE2" hè cuntrullata separatamente chì pò esse usata per Canards o altri scopi.
Cuntrollu di l'Alerone Singulu / Doppiu (Elevatore).
- U gyro funziona in modu di cuntrollu di l'alettone unicu quandu ci hè solu un input di l'alettone cunnessu. I dui canali di output di AIL è AIL2 emettenu u stessu signalu per i servos di l'alettone, cum'è ciò chì un filu Y-extended funziona. A funzione Servo Reverse furnita da u gyro pò esse usata per invertisce u servo quandu un servo inversu hè adupratu.
- U gyro funziona in u modu di cuntrollu di l'alettone duale se i dui ingressi di l'alettone sò cunnessi, in questu modu, i canali di output di AIL è AIL2 sò operati separatamente.
- U listessu vale per l'elevatori
MODI DI VOLU
A3S4 furnisce 6 modi di volu chì ponu esse cambiati in modu di 3 pusizioni (o in modu di 6 pusizioni) durante u volu. U modu di volu previstu assuciatu à ogni pusizioni di u switch pò esse specificatu via u cunfiguratore o a carta di prugrammazione. L'impostazione predefinita hè OFF - NORMAL - LEVEL in modu di 3 pusizioni. U culore di u LED mostra u modu di volu attuale di u gyro mentre in usu.
Table 3: Colors LED di Modu Flight

- Modalità GYRO OFF
Quandu opera in u modu GYRO OFF, u gyro serà disattivatu cumplettamente, è l'aviò sarà cumplettamente sottu u cuntrollu di u vostru trasmettitore cum'è prima di installà u gyro. Stu modu hè generalmente utilizatu solu per scopi di prova. - M odu NORMAL
U modu NORMAL, cunnisciutu ancu u "modu Rate", hè a funzione più basica di u gyro. Funziona basatu annantu à u cuntrollu di a rotazione di ogni assi di l'aviò. Quandu opera in questu modu, u giroscopiu correggerà solu i movimenti di rotazione attuale, una reazione momentanea serà applicata à i servosi quandu l'aeroplanu gira nantu à l'asse currispondente, i servos si moveranu in a so pusizioni neutrali appena l'aviò cessà di rotà. U modu NORMAL pò esse usatu cù quasi ogni dimensione è tipu d'aviò. Pò migliurà in modu efficace a stabilità è a precisione di l'aviò è riduce u puntu di stallo in particulare. - Modu LOCK
U modu LOCK hè cunnisciutu ancu u "modu Attitude Lock", "modu 3D" o "modu AVCS". Diversu da u modu NORMAL, u giroscopiu eseguirà una correzione permanente per i movimenti di rotazione nantu à ogni assi constantemente. Hè quandu liberate i bastoni l'aviò si ferma è mantene a so pusizione attuale immediatamente. Stu modu hè bè adattatu per praticà manuvre 3D basiche, cum'è l'alzata o a punta di u cuteddu. Siccomu pò aiutà à chjude l'attitudine di l'aviò, hè ancu utile per l'atterrissimu. - Modu ANGLE (Anzianu Trainer
U modu ANGLE, cunnisciutu ancu "Modu Trainer" o "Modu Attitude", limiterà l'angolo massimu di l'aviò in l'assi di rollu è di pitch. Roll and loop ùn sò micca permessi in questu modu, l'aviò serà stabilizatu tuttu u tempu, indipendentemente da qualsiasi input di bastone. Questu impedisce l'aviò da esse inclinatu in un angulu più grande chì pò causà un periculu. Appena i bastoni sò liberati, l'aviò serà purtatu automaticamente à a pusizione horizontale. Pudete aduprà stu modu cum'è salvezza d'urgenza, o in altre applicazioni, per esempiu, per avè una furmazione per novi principianti o per aduprà per FPV. L'angolo massimu permessu di stu modu pò esse specificatu via u cunfiguratore o a carta di prugrammazione. - Modu LEVEL
U modu LEVEL hè ancu cunnisciutu cum'è "Modu Auto-Level", "Modu Auto-Balance" o "Modu Horizon". Quandu opera in questu modu, l'aviò serà purtatu automaticamente à a pusizione horizontale quandu liberate i bastoni. Differenti da u modu ANGLE, ùn ci hè micca una limitazione di l'angolo massimu in questu modu è l'aviò serà stabilizatu solu quandu ùn ci hè micca un input di cuntrollu specificu da l'alettone è l'elevatore. Stu modu pò esse usatu se u pilotu diventa disorientatu è vulete salvà l'aviò da crashing. - Modu HOVER
U modu HOVER, cunnisciutu ancu u "modu Auto-Hover", furnisce a listessa funziunalità cum'è u modu LEVEL. L'unica diferenza hè chì quandu liberate i bastoni, l'aviò serà purtatu à a pusizione verticale (nasu in sopra) è mantene in aria. Stu modu hè cuncepitu per aiutà à amparà a manuvra di sopra è riduce a probabilità di crashing. - M odu USER
U Modu Definitu da l'Usuariu vi permette di decide quale modu di volu aduprà nantu à ogni assi separatamente. Per piacè nutate chì u modu HOVER ùn hè micca dispunibule per u modu d'utilizatore.
Configurazione di u Switch Mode Flight
Pudete utilizà qualsiasi interruttore di 3 pusizioni di u trasmettitore per cambià u modu di volu. U modu più simplice hè di utilizà u Canale di Gear è cunnette à u slot [Serial RX / M] di u gyro. Per fà chì u giroscopiu sia pussibule identificà e pusizioni currette, l'input PWM deve risponde à u requisitu di gamma cum'è mostratu quì sottu:
A3S4 supporta ancu u cambiamentu di modu di volu in 6 pusizioni, chì permette di cambià tutti i modi di volu in volu. Per fà questu, una funzione di mistura di un interruttore di 2 pusizioni è un interruttore di 3 pusizioni hè necessaria in u vostru trasmettitore. Per fà chì u giroscopiu sia pussibule identificà e pusizioni currette, l'input PWM deve risponde à u requisitu di gamma cum'è mostratu quì sottu:
Per ottene un interruttore logicu di 6 pusizioni, u vostru trasmettitore hà bisognu di supportà e funzioni di mischju di prugramma, a maiò parte di e radiu avanzate vi furniscenu tali funzioni. Per piacè riferite à i nostri websitu per example nantu à cumu cunfigurà u mischju per alcune radii populari.
GAIN AJUSTE
Guadagni basi
A3S4 furnisce un aghjustamentu separatu di u guadagnu di basa nantu à l'alettone, l'elevatore è u timone. U guadagnu basicu determina a forza di reazione di u gyro. In generale, u più altu u guadagnu, u più duru l'aviò si ferma dopu a rotazione è u più stabile è precisu l'aviò vole. Ma se u guadagnu hè troppu altu, l'aviò tenderà à oscillate à alta freccia nantu à l'assi currispundenti. S'ellu hè troppu chjucu, l'operazione è a stabilità ùn saranu micca cusì bè, è l'aviò ùn si ferma micca precisamente è sopra. U gyro serà disattivatu cumplettamente se stabilisce u guadagnu di basa à 0%. Per a prima prova di volu hè cunsigliatu di principià cù un paràmetru di guadagnu di basa più bassu (per esempiu, 30%) è cambia u gyro à u modu NORMAL. In casu chì l'aviò cumencia à oscillate, riduce u guadagnu di l'assi currispundenti. Se u cuntrollu si senti debbule è imprecisu è ùn mantene micca a pusizione quandu si ferma, allora aumenta u guadagnu, secondu questu approcciu, sintonizza finamente u guadagnu di basa finu à ottene u megliu rendimentu.
Mode Gain
Inoltre, u guadagnu di giroscopiu di ogni assi pò ancu esse aghjustatu separatamente per ogni modu di volu, cumprese Lock Gain, Angle Gain, Level Gain è Hover Gain, questi guadagni sò normalment usati dopu chì u guadagnu di basa hè statu stabilitu bè è funziona solu cù u modu di volu currispundente.
Guadagno Maestru Remote
U guadagnu maestru remoto hè utilizatu per cambià u guadagnu di basa di l'alettone, l'elevatore è u timone à u stessu tempu in volu. Utilizendu una leva di scorrimentu nantu à u trasmettitore, a tarifa di u guadagnu pò esse diminuite linearmente da 100% à 0%, pudete ancu aduprà un interruttore di 3 pusizioni per ottene una selezzione di 3 rates di u guadagnu. U guadagnu maestru remotu serà sempre predeterminatu à 100% se ùn cunnetta micca stu canale.
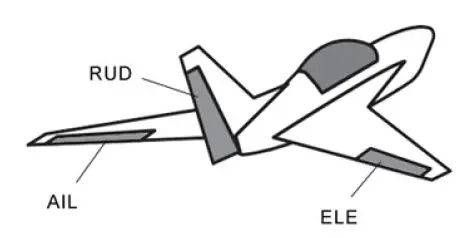
GYRO DIRECTION
Dopu a stallazione, alzate l'aviò è fate rotà rapidamente intornu à l'assi di rollu, pitch è imbarcu rispettivamente. Assicuratevi chì tutte e superfici di cuntrollu reagiscenu in a direzzione curretta in riferimentu à e figure sottu.
MASSIMA IMPORTANTE!
Hè assai impurtante per assicurà chì u gyro reagisce in a direzzione curretta in ogni assi prima di u volu. Una reazione opposta di u gyro puderia guidà à perde u cuntrollu o ancu crash!
Verificate a direzzione di gyro per Aileron
Girate rapidamente l'aviò à sinistra o à diritta intornu à l'asse di rollu, l'aleroni duveranu reagisce in a direzzione prevista cum'è mostratu quì sottu.
Verificate a direzzione di u giroscopiu per l'elevatore
Girate rapidamente l'aviò in su o giù intornu à l'asse di pitch, l'elevatore duverà reagisce in a direzzione prevista cum'è mostratu quì sottu.
Verificate a direzzione di u gyro per Rudder
Girate rapidamente l'aviò à sinistra o à diritta intornu à l'asse di imbardata, u timone duverà reagisce in a direzzione prevista cum'è mostra quì sottu.
LEVEL AND HOVER CALIBRATION
Quandu vola in modu ANGLE o LEVEL, gyro deve cunnosce l'angolo di l'aviò in direzzione di rollu è pitch, questu hè ottenutu calculendu l'attitudine propria. Una piccula deviazione d'angolo causata da a stallazione pò purtà à un cumpurtamentu inesperu quandu vola in modu ANGLE o LEVEL. Per quessa, una calibrazione di livellu hè cunsigliatu per cumpensà l'errore causatu da a stallazione è per stabilisce una riferenza di livellu propiu di l'aviò dopu a stallazione di u gyro.
- Prima di calibre, l'aviò deve esse postu nantu à a terra horizontale è fate l'ala parallella à a terra. Fate l'aviò un pocu in u nasu, perchè un certu angolo di elevazione hè generalmente necessariu per mantene u volu livellu per a maiò parte di l'aviò.
- Cliccate u buttone Calibrazione di Livellu in a tabulazione Sensor di u cunfiguratore per inizià a calibrazione. Tuttu u prucessu di calibrazione vi purterà parechji seconde è u LED lamperà in blu rapidamente durante a calibrazione. Ùn move micca l'aviò finu à chì a calibrazione hè fatta.
- Dopu una calibrazione successu, u risultatu serà salvatu è affissatu nantu à u screnu, pudete aghjustà manualmente in u futuru. Sè avete un rapidu lampeggiante rossu durante a calibrazione, questu significa chì u risultatu supera u valore massimu permissibile (ie ± 25deg), in questu casu, avete da reinstallà u gyro per riduce a deviazione causata da a stallazione.
Cum'è u listessu mutivu, una calibrazione di hover hè cunsigliatu per fà dopu a stallazione se vulete vola cù u modu HOVER. A prucedura hè abbastanza simile à quella di calibrazione di livellu. L'unica diferenza hè chì l'aviò deve esse elevatu verticalmente à a terra invece di mette in terra in u Passu 1.
CALIBRAZIONE DI L'ACCELEROMETRU
Ogni gyro hè statu attentamente testatu è calibratu prima di abbandunà a fabbrica. Di solitu, ùn avete micca bisognu di fà una calibrazione per l'accelerometru di novu. Tuttavia, in certi casi specifichi, avissimu suggerisce di ricalibrate l'accelerometru per ottene un rendimentu megliu, questi includenu cambiamenti di temperatura chì prubabilmente pruvucanu i cambiamenti di e caratteristiche meccaniche di u sensoru, o rimpiazzamentu di un novu sensoru, etc. A calibrazione deve esse. fattu nantu à un desktop horizontale è u gyro deve esse eliminatu da l'aviò prima. Prucedura di calibrazione Cunnette u gyro à u PC è aspettate finu à chì l'inizializazione hè fatta. Aprite u configuratore è andate à a tabulazione Sensor -> Accelerometer Calibration, cliccate nantu à u buttone Calibrate. Segui i suggerimenti è compie i prossimi 6 passi, ùn move micca u gyro mentre calibrate à ogni passu.
SETTINGS AVANZATE
Stick Deadband
A banda morta di u bastone hè a gamma intornu à u centru stessu di i bastoni induve u gyro ùn reagisce micca. Certi trasmettitori anu u prublema chì quandu i bastoni sò riportati dopu à un input, ùn sò micca esattamente in a listessa pusizione di centru cum'è prima chì pò generà una deviazione nantu à a funzione currispundente, in questa cundizione, pudete aumentà u paràmetru di a banda morta di bastone. per riparà. A gamma di regulazione di a banda morta hè da 0% à 20%, u 5% predeterminatu hè adattatu per a maiò parte di e radiu senza mudificazione.
Servo Frequency
Stabbilisce a frequenza di travagliu per i servos. I servos analogichi ponu travaglià solu cù 50Hz, una freccia alta pò causà danni à i servos. Verificate e specificazioni servo prima di aumentà u paràmetru, se ùn sapete micca quale hè a tarifa massima di aghjurnamentu tollerata da i vostri servi ùn mai aduprà più di 50Hz. In teoria, più altu hè a freccia di travagliu di i servos, u megliu rendimentu di u gyro pò esse acquistatu, ma pò aumentà u cunsumu di energia è causanu riscaldamentu di i servi. Questa paràmetra affetterà tutti i canali di output cumpresi AUX1 è AUX2.
Guadagnà u livellu
Cambia u livellu di u guadagnu di basa, u predeterminatu "Medium" hè adattatu per a maiò parte di l'aviò.
Cumportamentu di cuntrollu
Dopu a stallazione di u gyro, l'aviò diventerà più stabile, ma menu responsive per via di a correzione di u gyro. Per migliurà avemu bisognu di riduce a forza di currezzione di u gyro nantu à a direzzione desiderata dinamicamente quandu ci hè un input di i bastoni. Sta funzione permette di cambià u cumpurtamentu di cuntrollu scegliendu diverse curve di l'attenuazione di guadagnà.
Filtru digitale Gyro
Questa funzione hè aduprata per cunfigurà a frequenza di cut-off di u filtru passaghju hardware di u gyro. A riduzzione di a freccia pò riduce significativamente l'interferenza di a vibrazione da u fuselagiu. Testendu, l'impostazione predefinita DLPF_20Hz hè adattata per a maiò parte di l'aerei elettrici. Diminuisce appropritamente quandu a vibrazione hè forte, hè cunsigliatu di sceglie DLPF_5Hz quandu si usa u giroscopiu in un aeroplanu nitro o benzina. Per piacè nutate chì una alta frequenza di cut-off pò aumentà u cunsumu d'energia è pruvucà u riscaldamentu di i servos.
Programmazione
Per cunfigurà u gyro, scaricate è installate l'ultimu configuratore HobbyEagle A3 è u driver USB da u nostru websitu à https://www.hobbyeagle.com/a3-configurator/
- U software supporta Windows XP, Windows 7, Windows 8 è Windows 10 (32 o 64 bit).
- Se l'installazione falla, scaricate è installate Microsoft .NET Framework 4 prima.
- Installa u driver USB (CP210X_VCP) prima di cunnette u gyro à u PC.
Documenti cunnessi
Guida d'installazione https://www.hobbyeagle.com/a3-configurator/docs/installation_guide_en.pdf
Guida d'installazione di u driver USB https://www.hobbyeagle.com/a3-configurator/docs/usb_installation_guide_en.pdf
Guida Quick Start https://www.hobbyeagle.com/a3-configurator/docs/quick_start_guide_en.pdf
Guida di l'aghjurnamentu di u firmware https://www.hobbyeagle.com/a3-configurator/docs/firmware_update_guide_en.pdf
MASSIMA IMPORTANTE!
- Aduprate SEMPRE l'adattatore USB speciale è u cable di dati inclusi in u pacchettu mentre cunnette u gyro à un PC o a carta di prugrammazione. I cavi USB cumuni per i telefuni mobili o altri prudutti ùn funzionanu micca cù i nostri gyros!
- Hè ricumandemu d'utilizà u novu Program Card X per A3 Super 4 è mantene u firmware aghjurnatu à l'ultima versione.
SPECIFICAZIONI

Documenti / Risorse
 |
HOBBYEAGLE A3 Super 4 Controller di Flight 6-Axis Gyro and Stabilization Balancer Set Completo Scheda di prugrammazione per RC Airplane [pdfManuale d'usu A3 Super 4 Flight Controller 6-Axis Gyro and Stabilization Balancer Set Full Set Programming Card per RC Airplane, A3 Super 4, Flight Controller 6-Axis Gyro and Stabilization Balancer Set Full Set Programming Card for RC Airplane |



