![]()
MAN1014-01-EN
Pandhuan wiwitan cepet
Pandhuan Mulai Cepet PID Cscape
Konfigurasi PID lan Panuntun Mulai Cepet Tuning
PURWAKA
Pandhuan ing ngisor iki tumindak minangka introduksi kanggo pangguna PID (Proportional Integral Derivative) sistem lan pengontrol, lan carane nyetel lan ngatur loop PID ing Cscape karo Horner OCS. Informasi ing pandhuan iki minangka informasi tambahan ing bagean Bantuan Cscape sing nyakup PID. Output PID bisa digunakake ing macem-macem aplikasi, lan kabeh sistem beda-beda, supaya informasi sing kasedhiya ing pandhuan ing ngisor iki mung bakal dadi persiyapan dhasar.
Pandhuan ditulis kanggo miwiti karo prinsip inti pengontrol PID kanggo wong sing ora ngerti proses kasebut, banjur mbangun aplikasi lan nyetel sistem PID ing Cscape.
Topik ing ngisor iki bakal dibahas:
- Pambuka kanggo PID
- Dasar PID
- Konfigurasi Horner OCS Cscape
- Tuning
CATETAN: Ora kabeh kerumitan PID bakal diterangake ing kene, nanging informasi sing cukup kanggo bisa ngatur puteran dhasar nggunakake Cscape.
Kanggo video ing PID kita Webinar KLIK HERE
PAMBUKA
Fungsi PID minangka output sing ngganti utawa ngontrol properti fisik ing sistem. Kanggo pangguna anyar, nyetel sistem PID bisa nyebabake kebingungan lan frustasi. Examples saka fungsi PID bisa dideleng ing sistem sing ngawasi lan ngganti tekanan, suhu, kacepetan, volume, etc. Contone, thermostat HVAC menehi ilustrasi gampang kanggo nerangake. Thermostat HVAC kluwarga disetel menyang suhu statis tartamtu, Setpoint ing sistem PID. Unit kasebut ngukur suhu sekitar omah ing wektu tartamtu, ngasilake Variabel Proses, sing ana ing kahanan fluks. Bentenipun antarane Setpoint lan Variabel Proses diarani minangka Error sistem PID digunakake kanggo ngetung Output bali menyang termostat kanggo njaga suhu ing titik nyetel. Proses iki biasane ana ing kahanan loop tertutup sing terus-terusan sing bakal njaga suhu sing konsisten (bisa uga ora efisien energi kanggo HVAC nggunakake puteran PID). Ing ngisor iki minangka ilustrasi sistem PID dhasar:
 Ora ana bagean saka publikasi iki bisa diprodhuksi tanpa persetujuan sadurunge lan ijin ditulis saka Horner APG, LLC. Informasi ing dokumen iki bisa diganti tanpa kabar.
Ora ana bagean saka publikasi iki bisa diprodhuksi tanpa persetujuan sadurunge lan ijin ditulis saka Horner APG, LLC. Informasi ing dokumen iki bisa diganti tanpa kabar.
Syarat PID
Nilai Proporsional - "KP"
Nilai Proporsional (KP) (kadhangkala disebut Gain) ngganti Output kanthi proporsi karo nilai kesalahan saiki. Nilai proporsional ngganti output ing sistem PID paling, lan iku kudu dadi titik wiwitan sak proses tuning (kang bakal diterangake ing liyane rinci mengko). Nanging, yen owah-owahan nilai proporsional dhuwur banget, bisa nyebabake sistem ora stabil. Gain proporsional cilik nyebabake owah-owahan output sing cilik banget, sing bisa dadi cilik banget kanggo kesalahan input sing gedhe, nyebabake pengontrol sing kurang responsif (sensitif).
Kontrol mung proporsional ora bakal mapan ing nilai target nanging bakal nahan kesalahan stabil - fungsi saka gain proporsional lan gain proses.
Sing luwih dhuwur proporsional gain%, sing luwih gedhe owah-owahan ing output.
Nilai Integral – KI
Nilai Integral (KI) katon ing klempakan saka kasalahan kepungkur kanggo ngetung owah-owahan Nilai sabanjuré kanggo algoritma, saéngga bisa digambaraké minangka owah-owahan ing Nilai liwat wektu tartamtu. Nilai integral nyepetake gerakan proses menyang titik setel lan ngilangi kesalahan kahanan ajeg sing kedadeyan kanthi kontrol mung proporsional. Proses kasebut nduweni tujuan kanggo nyuda kesalahan stabil dadi nol, nggawe sistem PID sing stabil lan efektif.
Pengontrol PI minangka jinis kontrol sing paling umum, amarga biasane bisa stabil ing titik sing disetel tanpa mbutuhake istilah Turunan. Nanging, kadhangkala nilai turunan dibutuhake kanggo nyetabilake loop PID utawa nambah responsif. Sing luwih dhuwur "baleni / detik" Nilai Integral Term, sing luwih gedhe asil owah-owahan. Ati-ati saka overshoot.
Nilai turunan - "Kd"
Nilai Turunan (Kd) sebanding karo tingkat owah-owahan variabel proses. Istilah Derivatif nggambarake tingkat owah-owahan saiki menyang mangsa ngarep kanthi sawetara detik, ngarepake owah-owahan kesalahan kasebut. Nambahake istilah Turunan menyang daur ulang PI bisa nyebabake daur ulang sing luwih responsif utawa luwih cepet amarga ngidini P lan aku luwih gedhe. Nilai turunan diproyeksikan ing detik, tegese jumlah detik sing bakal diproyeksikan ing mangsa ngarep kanggo ngantisipasi tingkat owah-owahan.
Nanging, yen ana gangguan sistem ing daur ulang PID utawa osilasi, istilah D bisa spike nilai liyane lan nimbulaké daur ulang algoritma PID ilang kontrol, èfèktif Rendering daur ulang ora dipercaya.
Nilai turunan bisa nyebabake respon loop sing luwih cepet, nanging waspada karo gangguan sistem. Miwiti tanpa lan nambah yen perlu.
Sijine Kabeh
Ing ngisor iki ana bagan dhasar sing nerangake carane PID umume fungsi nalika tambah, sing bakal mbantu ing bagean "Konfigurasi" lan "Tuning" ing ngisor iki:
Cathetan: Saben sistem unik, mula tabel ing ngisor iki mung nerangake hubungan umum.
| Nilai | Munggah Wektu | SetPoint Overshoot | Ngatur wektu | Steady State Error |
| Proporsional | Suda | mundhak | – | Suda |
| integral | Suda | mundhak | mundhak | Mbuwang |
| Turunan | – | Suda | Suda | – |
KONFIGURASI uwal
4.1 Pilih Blok fungsi PID
Ana rong fungsi pemblokiran PID beda ing Cscape: Independent lan ISA. Loro-lorone blok PID nggunakake setpoint lan variabel proses kanggo ngganti variabel kontrol nggunakake algoritma set. Kaloro blok PID bakal ngasilake solusi sing padha, nanging nggunakake persamaan sing beda:
ISA: CVOUT = KP*(Error + (KI*Error*Dt/Ti) + (Kd*Derivative)) + CVBias.
Mandhiri:
CVOUT = KP*Error + (KI *Error*Dt/Ti) + (Kd*Derivative) + CVBias
Kanggo mayoritas aplikasi, salah siji fungsi PID bisa digunakake kanggo nyetel sistem. Blok PID Independen umume luwih umum. Ing pemblokiran ISA, KP pingan dening produk saka (Error + (KI * Error * Dt / Ti), kang bakal rada ngganti cara nilai sesambungan sak proses tuning, nanging loro-lorone teka menyang asil pungkasan padha.
Persamaan matematika prasaja ing ndhuwur bisa nyebabake kebingungan nalika ngliwati proses tuning. Blok fungsi Cscape nggawe proses tuning luwih gampang kanthi nerjemahake menyang kolom sing bisa diisi pangguna, kalebu pilihan kanggo nyetel otomatis.
4.2 Antarmuka Cscape lan Logika Tangga
Fungsi PID bisa diatur kanthi macem-macem cara. Konfigurasi ing ngisor iki nuduhake oven sing dikontrol suhu PID kanthi gulungan pemanas sing didorong dening relay sing diaktifake liwat output PWM. mantanampprogram le banget prasaja, lan bisa uga ora nggambarake saben intricacy fungsi PID. Uwal uga bisa nggunakake output analog kanggo ngatur sistem.
Cathetan: Ora ana rong program sing padha. Gunakake ing ngisor iki minangka pandhuan mung.
- Ing mantan ikiample, nyeleh kontak biasane ditutup ing awal rung. Klik kaping pindho lan ganti alamat kanggo %S001 kanggo Pindai Pisanan (FST_SCN).
- Bukak Operasi Khusus ing Project Toolbox. Pilih PID Independent (yen pengin PID_ISA uga bisa digunakake) - ndeleng Figure 4.1.
- Selehake blok PID_IND ing rung padha.
- Selehake coil biasane mbukak ono kanggo target output, kang kene =% Q0001 (ndeleng Figure 4.2) Yen output iki analog, nggunakake% AQ0001. Mantan ikiample nggunakake relay kanggo kontrol output PWM, supaya% Q0001 digunakake

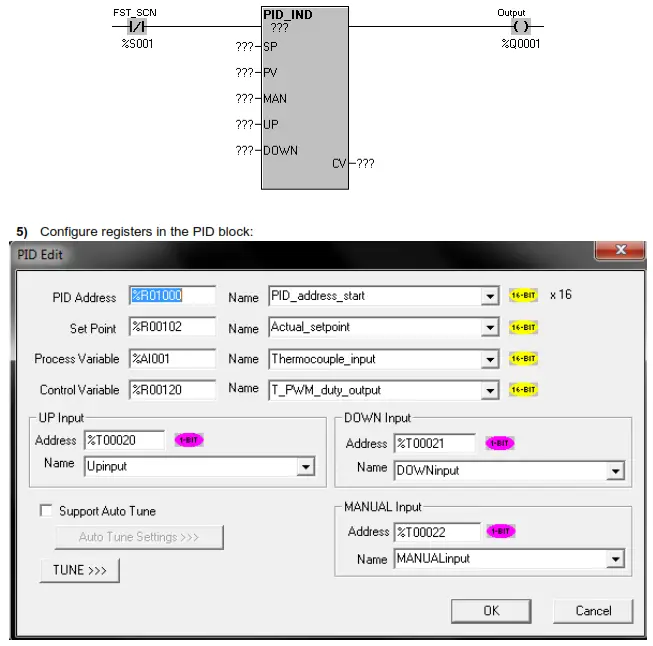
Alamat PID: Klompok 16 ndhaftar consecutive sing bakal digunakake kanggo nyimpen paramèter tune kanggo digunakake ing petungan PID (rincian liyane ing register tartamtu mengko) Set Point: Setpoint punika Nilai sing PID nyoba kanggo entuk; Nilai Variabel Proses (PV) yakuwi kanggo nggayuh.
Variabel Proses: Nilai saiki saka proses: nilai sing PID nyoba kanggo ngganti
Variabel kontrol: Output saka PID. Nilai sing bakal digunakake kanggo ngontrol proses kanggo nggawa Variabel Proses menyang SetPoint
Input MANUAL: Manual / Auto Boolean Ngalih. Ketik alamat sing wis kadhaptar utawa pilih register sing dijenengi minangka bit Input Manual sing dikontrol pangguna. Register iki minangka register Boolean (1-bit), biasane %T.
Input UP: Manual Mode munggah input imbuhan. Ketik alamat sing wis kadhaptar utawa pilih register sing dijenengi minangka bit Input UP sing dikontrol pangguna. Register iki minangka register Boolean (1-bit), biasane %T.
input mudhun: Mode Manual mudhun imbuhan. Ketik alamat sing kadhaptar utawa pilih register sing dijenengi minangka bit Input DOWN sing dikontrol pangguna. Register iki minangka register Boolean (1-bit), biasane %T Support AutoTune: Mbisakake auto-tune 6) Input Degrees to INT Setpoint for PID block
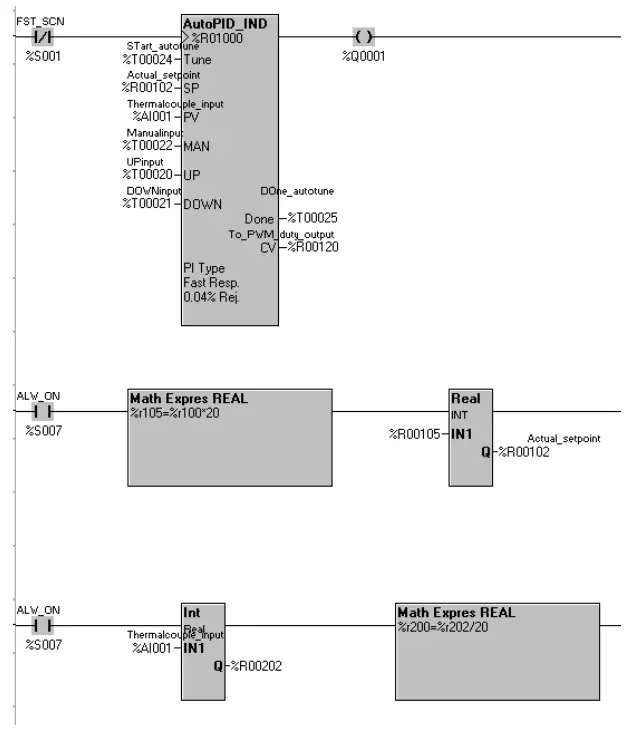
Setel blok Math Expres Real kanthi kontak% S007 ALW_ON kanggo nemtokake "% R105 =% r100 * 20" Banjur, atur blok REAL menyang INT kanggo ngowahi nilai kasebut dadi% R00102, yaiku Actual_setpoint. (Deleng ngisor)
Cathetan: Ing mantan ikiampNanging, %R00100 disetel minangka kolom sing bisa diowahi ing layar. Pangguna nyetel suhu ing derajat Celsius, banjur rung iki ngowahi nomer kasebut dadi integer sing digunakake blok fungsi PID. %R00105 tumindak minangka placeholder kanggo nilai minangka liwat konversi

7) Tampilan Input Thermocouple ing Derajat Celcius
Selehake INT kanggo pemblokiran fungsi REAL karo% S007 ALW_ON kontak kanggo ngowahi input integer saka% AI001 thermocouple_input Nilai kanggo nomer nyata ing% R202. Banjur, atur blok Math Expres REAL ing rung kanggo ngowahi input termokopel %R202 dadi derajat Celsius kanggo layar tampilan (%R200).
Cathetan: Ing mantan ikiample,% R200 bakal digunakake kanggo nampilake ing layar minangka suhu nyata ing derajat Celsius. Yen Fahrenheit luwih disenengi, mung ngganti persamaan ing kothak Math Express REAL kanggo ngowahi ukuran sing beda.

8) Nggawe layar sing nduweni fungsi kanggo nampilake utawa ngganti lapangan tartamtu saka program, kayata ngganti setpoint karo% R102 ndhuwur, utawa nampilake suhu ing wangun grafik saka input suhu saka thermocouple, kaya% R200 ndhuwur. Uga, garis geser utawa kolom sing bisa diowahi bisa digawe ing layar supaya luwih gampang lan cepet ngganti istilah PID kanthi manual kanggo tujuan nyetel.
Kode ing ngisor iki nuduhake kabeh langkah sadurunge sing wis rampung kanthi nyetel Auto-Tune ing blok PID:
4.3 Mode PWM
Kanggo aplikasi apa wae sing mbutuhake output digital (pemanas sing dikontrol dening relay utawa output digital) mode PWM minangka pilihan. Iki bakal beda-beda daya sing liwat pemblokiran minangka sinyal PWM. Kanggo ngontrol output kanthi cara iki, coil kudu diselehake ing sisih liya blok PID.
Kanggo mode PWM, cl dhuwuramp lan clamp kudu diselehake ing 32000 lan -32000 mungguh. -32000 minangka siklus tugas 0% lan 32000 minangka siklus tugas 100%,
Wektu siklus PWM: Wektu siklus PID nemtokake sepira kerepe PID bakal nguripake lan mateni. Bakal ngalih nganti sapisan sajrone wektu siklus. Yen wektu siklus kiwa ing 0 pemblokiran PID bakal pass daya nalika Nilai CV positif, lan ora pass daya nalika Nilai CV negatif, kadhangkala iki mode operasi sing dikarepake.
Milih wektu siklus sing tepat kanggo operasi bisa dadi penting banget amarga bakal langsung mengaruhi sepira kerepe output sampeyan bakal ngalih saka ON nganti OFF. Yen sampeyan duwe nyandhang fisik amarga ngowahi output saka ON menyang OFF (kaya ing relay) iki bakal mbantu mbatesi sepira kerepe owah-owahan.
4.4 Setpoints
Nalika nggunakake blok PID, kabeh parameter tuning disimpen ing blok perintah. Yen %R register digunakake, data iki retentive, tegese iku bakal tetep ing register sawise siklus daya.
Yen program PID bakal dilebokake menyang pengontrol liyane, isi register sing ana gandhengane karo fungsi PID. Iki bisa ditindakake liwat fungsi Pindhah utawa liwat setpoints.
Nalika nggunakake fungsi Pindhah, informasi babagan apa sing ditindakake saben register kasedhiya ing blok kontrol PID. Setpoints bisa dipikolehi kanthi nggunakake tombol Simpen Setpoints ing menu tuning PID.
Nalika nggunakake setpoints, iku penting kanggo mesthekake yen setpoints populate nilai PID. Kanggo nindakake, CsCape bisa diatur kanggo ngundhuh setpoints menyang controller.
Menyang Program → Download Options lan priksa manawa kothak centhang sing ngandika Setpoint Tabel dicenthang.
4.5 Daftar
Loro-lorone unsur PID mbutuhake array saka enem belas (16) WORD (16-bit) register. Iki biasane bakal dadi jinis %R. Iki diarani Array Referensi.
Saben unsur PID kudu nggunakake Array Referensi sing kapisah, sanajan nilai kasebut identik karo unsur PID sing wis ana. Ora ana unsur PID sing tumpang tindih.
Register ing offset 0 nganti 9 kudu dikonfigurasi sadurunge unsur PID digunakake.
| Ndaftar Offset | Paramèter | Unit | Range | Katrangan |
| 0 | Sample Periode | 10 mS | 0 nganti 65535 | Wektu paling cendhak ing 10 mS Increments diijini antarane solusi PID |
|
1 |
Band Mati + |
PV cacahe |
0 nganti 32000 |
Nemtokake watesan Upper lan Lower Dead Band ing syarat-syarat counts PV. Loro-lorone kudu disetel dadi 0 nganti PID disetel. A Band Mati bisa uga perlu kanggo nyegah owah-owahan cilik ing nilai CV amarga kesalahan variasi tipis. |
|
2 |
Band Mati - |
PV cacahe |
0 nganti -3200 |
|
| 3 | Keuntungan Proporsional (KP) Persen | persen | 0 nganti 327.67% | Nyetel Faktor Gain Proporsional ing syarat-syarat persen. 100 set gain kesatuan (gain saka 1). |
| 4 | Keuntungan Derivatif (Kd) | 10 mS | 0 nganti 327.67
detik |
Dilebokake minangka wektu kanthi resolusi 10 mS. Ing persamaan PID, iki nduweni efek. |
|
5 |
Nilai Integral (KI) |
Baleni saben 1000 detik | 0 nganti 32.76
mbaleni saben detik |
Dilebokake minangka nomer mbaleni saben detik. Tingkat integrasi. |
| 6 | CV Bias | CV Counts | -32000 iki
+32000 |
Jumlah CV counts ditambahaké kanggo output sadurunge tarif lan amplindhu clamps. |
| 7 | CV Ndhuwur Clamp | CV Counts | -32000 iki
+32000 |
Sawetara jumlah CV nuduhake nilai paling dhuwur lan paling murah kanggo CV. CV Ndhuwur Clamp kudu luwih positif tinimbang CV Lower Clamp. |
| 8 | CV Ngisor Clamp | CV Counts | -32000 iki
+32000 |
|
|
9 |
Wektu Slew Minimal |
Detik perjalanan lengkap |
0 nganti 32000
detik kanggo mindhah 32000 CV cacahe |
Nemtokake carane cepet Nilai CV bisa ngganti. |
| 10 | Tembung Konfigurasi | N/A | N/A | Panggunaan Internal - Aja Ngowahi Nilai iki |
|
11 |
Komando Manual |
CV Counts |
Trek Otomatis ing Mode Otomatis; nyetel CV ing Mode Manual | Ing mode otomatis iki ndhaftar trek Nilai CV. Ing mode Manual, ndhaftar iki ngemot nilai sing output kanggo CV ing clamp lan mateni watesan. |
| 12 | SP internal | Digunakake dening OCS | N/A | Trek SP ing |
| 13 | PV internal | Digunakake dening OCS | N/A | Trek PV ing |
| 14 | CV internal | Digunakake dening OCS | N/A | Lacak CV metu |
| 15 | Wektu siklus | Detik | N/A | Wektu siklus kanggo PWM ing detik |
TUNING
5.1 Parameter Tune
Iku penting kanggo ngerti carane paramèter ing fungsi pemblokiran PID. Ing ngisor iki, definisi kanggo saben nilai didhaptar:
| Paramèter | definisi |
| SampPeriode: | Wektu diijini antarane petungan PID, carane kerep controller bakal ngetung Nilai CV anyar. |
| Band mati +/- | Pita mati digunakake kanggo nyegah owah-owahan cilik ing Nilai Variabel Kontrol sing bisa disebabake owah-owahan cilik ing variabel proses nalika nyedhaki setpoint. Iki nggawe sawetara nilai sak setpoint, yen variabel proses ana ing kisaran iki, banjur variabel kontrol ora bakal ngganti. |
| Keuntungan Proporsional (Kp): | Iki minangka nilai gain sing langsung digandhengake karo nilai kesalahan saiki, yaiku KP saka persamaan PID. |
| Keuntungan Derivatif (Kd): | Kanggo umume aplikasi Derivative Gain ora perlu. Nilai gain iki dilebokake kanthi resolusi 10mS, nilai iki digunakake kanggo nggawe variabel kontrol nanggapi owah-owahan dadakan ing variabel proses. |
| Gain Integral (Ki): | Gain integral digunakake kanggo nggawa nilai rata-rata saka variabel proses sing padha karo titik disetel liwat wektu. Bakal ngrampungake iki kanthi nggunakake integral kanggo nemokake kesalahan total sajrone wektu tartamtu lan nggawe pangaturan kanggo variabel Kontrol. Yen variabel proses adoh saka setpoint kanggo wektu sing suwe, bias iki bisa berkembang. Yen wis dibangun, bisa uga butuh sawetara wektu kanggo owah-owahan, iki sing kudu diwaspadai ing proses sing bisa tetep suwe ing siji titik lan banjur owah-owahan gedhe menyang liyane. |
| CV Bias: | Iki minangka nilai sing ditambahake menyang variabel Kontrol sawise pitungan wis ditindakake. Variabel kontrol bakal diwilang, bias bakal ditambahake ing, lan banjur sembarang matèni utawa ampwatesan litude bakal ditrapake. |
| CV ndhuwur lan ngisor clamp: | Variabel kontrol ora bisa luwih dhuwur tinimbang cl ndhuwuramp lan ora bisa luwih murah tinimbang cl ngisoramp. Iki bakal nggawe manawa variabel kontrol sampeyan tetep ing kisaran sing ditemtokake. |
| Wektu Slew Minimal: | Iki bakal mbatesi sepira cepet variabel Kontrol bakal diganti. Unit kasebut minangka sawetara detik sing dibutuhake kanggo mindhah saka 0 nganti 32000, saengga tingkat mateni 64 bakal ngidini variabel kontrol ngganti ora luwih saka 500 count per detik. |
| Wektu Siklus (mode PWM mung): | Iki siklus tugas kanggo fungsi output PWM ing sawetara detik, iki bisa digunakake kanggo matesi sepira kerepe output bakal ngalih saka ON kanggo OFF. Yen ditinggalake ing 0, blok kasebut bakal ngliwati daya yen CV 0 utawa luwih gedhe, lan ora ngliwati daya yen CV kurang saka 0. |
5.2 Tuning Manual
Tuning Manual KP
Kanggo akeh aplikasi, tuning manual cepet iku kabeh sing perlu, umume aplikasi bakal nggunakake nilai KP lan nilai KI cilik. Nalika nyetel nilai awal, bisa mbiyantu view PID ing babagan matematika. Example: Kanggo aplikasi kontrol suhu, supaya arep ngendi Nilai KP kudu miwiti ing mikir ing syarat-syarat
suhu:
- Kanggo example, kanggo output maksimal (32,000) nalika suhu saya paling sethithik 20 ° ngisor setpoint
- Ngonversi 20 ° menyang count mentah saka input analog, yen input duwe resolusi 0.05 ° banjur iki menehi count mentah 400
- Persamaan kanthi gain konstan yaiku CVOUT = KP*Error, amarga CVOUT lan Error wis dingerteni, isi persamaan 32000 = KP*400 32000/400 = KP KP = 80
- Saiki kita duwe titik wiwitan kanggo KP, penting kanggo nyoba iki ing aplikasi nyata
Tuning Manual KI
Kanggo mayoritas aplikasi, nilai KI ora perlu gedhe banget. Ana sawetara perkara sing kudu ditimbang nalika nemtokake nilai KI apa sing kudu diduweni dening aplikasi sampeyan.
Cara kerjane nilai integral yaiku njupuk integral saka kesalahan sajrone sawetara wektu lan nambahake bias CV "ora katon". Iki bakal terus nambah utawa nyuda nganti rata-rata PV sampeyan dadi set point.
Yen proses alon, nonton metu kanggo Nilai gedhe ing bias "ora katon" iki. Yen ana owah-owahan ing setpoint, nilai iki bisa uga ora cepet banget ganti lan bisa nggawe wektu respon sistem sampeyan luwih alon.
Matematika:
Integral_Bias = Integral_Bias + Ki*.001(dt, wektu liwati wiwit pangukuran pungkasan ing detik)*error
Kanggo gamblang, katon ing Tambah liwat detik lan nganggep sing kanggo wektu kaloro variabel proses tetep ora diganti.
Example(s): SetPoint = 1000, variabel proses = 800
| Ki | Ngganti variabel Kontrol per detik |
| 100 | 20 |
| 250 | 50 |
| 600 | 120 |
| 1000 | 200 |
Bebaya gedhe karo integral iku tansah aktif. Yen proses diwiwiti kanthi set point 5000, variabel proses diwiwiti ing 2000, lan variabel proses njupuk 3 menit kanggo tekan set point, ing wektu kasebut kanthi nilai Ki 100 ing wektu kasebut Bias bakal ana ing nilai. saka 27000 counts. Iki bakal nyebabake overshoot sing signifikan kanggo variabel proses.
5.3 Auto-Tuning Blok PID
| Setelan kanggo PID Auto-Tune | |
| Miwiti Alamat Tune Otomatis | Alamat 1-bit sing bakal disetel dhuwur sajrone proses auto-tune |
| Alamat Rampung Otomatis | Alamat 1-bit sing bakal disetel dhuwur sawise proses auto-tune rampung |
| Tipe Tune Otomatis | Menu gulung mudhun kanggo milih jinis tuning sing bakal ditindakake. Telung huruf saben stands kanggo jinis gain Proportional, Integral, Derivative. Kabeh telu bisa dipilih, Proporsional lan Integral, utawa mung Proporsional. (PID, PI, utawa P ) |
| Nyaring swara | Nyaring swara nemtokake jumlah ing ndhuwur lan ngisor titik sing kudu ditindakake proses Auto-Tune kanggo entuk pangukuran. Iki bakal nyegah gangguan ing pangukuran kanggo menehi tandha manawa Auto Tune wis tekan titik setel sing dikarepake sadurunge wis diwasa. Persentage adhedhasar skala lengkap (32000 count) lan kisaran saka 0.04% (~13 count) nganti %5 (1600 count) |
| Respon Controller | Nemtokake "kacepetan" respon sing disetel kanthi otomatis. Cepet bakal ngasilake sawetara overshoot nanging tekan ing set point luwih cepet, Sedheng bakal ngasilake overshoot tipis lan tekan titik disetel rada alon, alon-alon ora bakal ngasilake overshoot, Alon banget bisa uga kudu dipilih kanggo proses sing "ing njaba kisaran paling luweh kanggo aturan Zeigler-Nichols" - sistem sensitif banget |
| Tune ing 2/3 Setpoint | Ngidini eksperimen tuning otomatis ngganti output adhedhasar 2/3 titik disetel. Gunakake pilihan iki yen proses ora dikarepake kanggo lelungan ing ndhuwur titik disetel sajrone eksperimen nyetel otomatis. |
Sadurunge Autotuning, priksa manawa sampeyan nyetel nilai ing ngisor iki ing blok PID:
- Ongko terakhir sing menentukan
- Sample Periode
- Cl ndhuwur lan ngisoramp
- Istilah kesalahan,
- Polaritas output
Sawise kabeh setelan wis rampung, setel bit Start Auto-Tune High (ing Data Watch utawa ing kode) Sistem bakal ngontrol lan nyebabake Variabel Proses munggah ing ndhuwur lan ngisor setpoint, kaping pirang-pirang sawise ana. dijupuk kabeh pangukuran sing dibutuhake, bit AutoTune_Done bakal dhuwur lan blok PID bakal bali menyang status pungkasan kanthi nilai Proporsional, Turunan, lan Integral "dioptimalake". Ing CsCape, bukak blok PID kanggo ndeleng nilai kasebut, simpen minangka setpoints anyar utawa gawe cathetan kanggo panggunaan ing mangsa ngarep.
DUKUNGAN TEKNIS
AMERIKA UTARA
Telpon: 317-916-4274
Fax: 317-639-4279
http://www.heapg.com
Email: techsppt@heapg.com
EROPA
Telpon: +353-21-4321266
Fax: +353-21-4321826
http://www.horner-apg.com
Email: tech.support@horner-apg.com
Dokumen / Sumber Daya
 |
Sistem PID lan Pengontrol HORNER Cscape [pdf] Pandhuan pangguna Sistem PID lan Pengontrol Cscape |



