![]()
MAN1014-01-EN
Dali nga Giya sa Pagsugod
Giya sa Dali nga Pagsugod sa Cscape PID
PID Configuration ug Tuning Quick Start Guide
PASIUNA
Ang mosunod nga giya naglihok isip usa ka pasiuna alang sa mga tiggamit sa PID (Proportional Integral Derivative) nga mga sistema ug mga controller, ug unsaon pag-set up ug pag-configure sa usa ka PID loop sa Cscape gamit ang Horner OCS. Ang impormasyon niini nga giya naglihok isip dugang nga impormasyon sa seksyon sa Cscape Help nga naglangkob sa mga PID. Ang mga output sa PID mahimong magamit sa lain-laing mga aplikasyon, ug ang tanan nga mga sistema lahi, mao nga ang impormasyon nga gihatag sa mosunod nga giya molihok isip usa ka sukaranan nga setup lamang.
Gisulat ang giya aron magsugod sa kinauyokan nga mga prinsipyo sa PID controllers para sa mga dili kaayo batid sa proseso, unya magtukod sa pag-apply ug pag-tune sa PID system sa Cscape.
Ang masunod nga mga topiko pagatagdon:
- Pasiuna sa PID
- PID Fundamentals
- Horner OCS Cscape Configuration
- Tuning
NOTA: Dili tanan nga mga intricacies sa PIDs ipatin-aw dinhi, apan igo nga impormasyon aron makahimo sa pagdumala sa mga batakang loops gamit ang Cscape.
Para sa video sa among PID Webinar CLICK HERE
PASIUNA
Ang mga function sa PID mao ang mga output nga nagbag-o o nagkontrol sa usa ka pisikal nga kabtangan sa usa ka sistema. Alang sa mga bag-ong tiggamit, ang pag-tune sa mga sistema sa PID mahimong hinungdan sa kalibog ug kapakyasan. ExampAng gamay nga mga gimbuhaton sa PID makita sa mga sistema nga nagmonitor ug nagbag-o sa mga pressure, temperatura, katulin, volume, ug uban pa. Pananglitan, ang usa ka thermostat sa HVAC naghatag usa ka dali nga ipasabut nga ilustrasyon. Ang usa ka thermostat nga HVAC sa panimalay gitakda sa usa ka piho nga static nga temperatura, usa ka Setpoint sa usa ka PID system. Gisukod sa yunit ang temperatura sa palibot sa balay sa bisan unsang oras, nga nagmugna usa ka Variable sa Proseso, nga naa sa kahimtang sa pagbag-o. Ang kalainan tali sa Setpoint ug sa Process Variable gitawag nga Error nga gigamit sa PID system aron kuwentahon ang Output balik sa thermostat aron mapabilin ang temperatura sa set point. Kini nga proseso kasagaran sa usa ka padayon, closed-loop nga kahimtang nga magpabilin sa usa ka makanunayon nga temperatura (mahimo nga dili enerhiya episyente alang sa HVAC sa paggamit sa PID loops). Sa ubos usa ka ilustrasyon sa usa ka batakang sistema sa PID:
 Walay bahin niini nga publikasyon ang mahimong kopyahon nga walay una nga kasabutan ug sinulat nga pagtugot sa Horner APG, LLC. Ang kasayuran sa kini nga dokumento mahimong usbon nga wala’y pahibalo.
Walay bahin niini nga publikasyon ang mahimong kopyahon nga walay una nga kasabutan ug sinulat nga pagtugot sa Horner APG, LLC. Ang kasayuran sa kini nga dokumento mahimong usbon nga wala’y pahibalo.
Mga Termino sa PID
Proporsyonal nga Bili - "KP"
Ang Proportional Value (KP) (usahay gitawag nga Gain) nagbag-o sa Output sa proporsyon sa kasamtangan nga kantidad sa sayup. Ang proporsyonal nga kantidad nagbag-o sa output sa usa ka sistema sa PID, ug kini kinahanglan nga usa ka punto sa pagsugod sa proseso sa pag-tune (nga ipasabut sa dugang nga detalye sa ulahi). Bisan pa, kung ang pagbag-o sa proporsyonal nga kantidad labi ka taas, mahimo’g moresulta kini sa usa ka dili lig-on nga sistema. Ang gamay nga proporsyonal nga ganansya nagresulta sa gamay kaayo nga pagbag-o sa output, nga mahimo’g gamay ra kaayo alang sa usa ka dako nga sayup sa pag-input, hinungdan sa usa ka dili kaayo responsive (sensitibo) nga tigkontrol.
Ang proporsyonal lamang nga kontrol dili mohusay sa target nga kantidad apan magpabilin ang usa ka makanunayon nga kahimtang nga sayup - usa ka function sa proporsyonal nga ganansya ug ang nakuha sa proseso.
Ang mas taas nga proporsyonal nga ganansya%, mas dako ang pagbag-o sa output.
Integral nga Bili - "KI"
Ang Integral Value (KI) nagtan-aw sa usa ka akumulasyon sa nangaging mga kasaypanan aron makalkulo ang sunod nga pagbag-o sa bili alang sa algorithm, sa ingon mahimong gihulagway ingon nga pagbag-o sa bili sa usa ka panahon. Ang integral nga bili nagpadali sa paglihok sa proseso padulong sa set point ug nagwagtang sa nahabilin nga steady-state error nga mahitabo sa proporsyonal-lamang nga kontrol. Ang proseso nagtumong sa pagpakunhod sa steady-state error ngadto sa zero, paghimo sa usa ka lig-on ug epektibo nga PID system.
Ang mga tigkontrol sa PI mao ang labing kaylap nga matang sa pagkontrol, tungod kay sila sa kasagaran maka-stabilize sa usa ka set nga punto nga dili kinahanglan ang termino nga Derivative. Bisan pa, usahay gikinahanglan ang usa ka derivative value aron mapalig-on ang PID loop o madugangan ang pagtubag. Kon mas taas ang “repeats/sec” value sa Integral Term, mas dako ang resulta nga kausaban. Pag-amping sa overshoot.
Derivative Value - "Kd"
Ang Derivative Value (Kd) kay proporsyonal sa rate sa pagbag-o sa variable nga proseso. Ang termino nga Derivative nagproyekto sa kasamtangan nga rate sa pagbag-o sa umaabot pinaagi sa usa ka set nga gidaghanon sa mga segundo, nagpaabut sa mga pagbag-o sa sayup. Ang pagdugang sa termino nga Derivative sa usa ka PI loop mahimong mosangpot sa usa ka mas responsive o mas paspas nga loop tungod kay kini nagtugot sa mas dako nga P ug I nga mga kadaugan. Ang derivative nga kantidad giplano sa mga segundo, nagpasabut nga ang gidaghanon sa mga segundo nga ang kantidad nga giplano sa umaabot aron mapaabut ang rate sa pagbag-o.
Bisan pa, kung adunay kasaba sa sistema sa PID loop o oscillations, ang termino sa D mahimong mag-spike sa ubang mga kantidad ug hinungdan nga ang PID algorithm loop mawad-an sa kontrol, nga epektibo nga naghimo sa loop nga dili kasaligan.
Ang mga derivative value mahimong mosangpot sa mas paspas nga pagtubag sa loop, apan pagbantay sa kasaba sa sistema. Pagsugod nga wala ug dugangi kung gikinahanglan.
Gihiusa Kini Tanan
Sa ubos usa ka sukaranan nga tsart nga nagpatin-aw kung giunsa ang PID sa kasagaran molihok kung gipataas, nga makatabang sa mga musunod nga seksyon nga "Pag-configure" ug "Pag-tune":
Mubo nga sulat: Ang matag sistema talagsaon, mao nga ang mosunod nga talaan nagpatin-aw sa mga kinatibuk-ang relasyon lamang.
| Bili | Tindog nga Panahon | Overshoot sa SetPoint | Pag-areglo sa Oras | Kasaypanan sa Steady State |
| Proporsyonal | Nagkunhod | Nagdugang | – | Nagkunhod |
| Integral | Nagkunhod | Nagdugang | Nagdugang | Nawala |
| Derivative | – | Nagkunhod | Nagkunhod | – |
PAG-ESCAPE CONFIGURATION
4.1 Pagpili sa usa ka PID function Block
Adunay duha ka lainlaing PID block function sa Cscape: Independent ug ISA. Ang duha ka PID block naggamit sa setpoint ug process variable aron mausab ang control variable gamit ang set algorithms. Ang duha ka mga bloke sa PID makakuha sa parehas nga solusyon, apan gamita ang lainlaing mga equation:
ISA: CVOUT = KP*(Error + (KI*Error*Dt/Ti) + (Kd*Derivative)) + CVBias.
Independent:
CVOUT = KP*Error + (KI *Error*Dt/Ti) + (Kd*Derivative) + CVBias
Alang sa kadaghanan sa mga aplikasyon, ang PID function mahimong magamit sa pag-tune sa usa ka sistema. Ang Independent nga PID block kasagaran mas komon. Sa bloke sa ISA, ang KP gipadaghan sa produkto sa (Error + (KI*Error*Dt/Ti), nga gamay ra nga magbag-o sa paagi nga ang mga kantidad makig-uban sa panahon sa proseso sa pag-tune, apan silang duha moabut sa parehas nga sangputanan.
Ang yano nga equation sa matematika sa ibabaw mahimong hinungdan sa kalibog kung moagi sa proseso sa pag-tune. Gipasayon sa block sa function sa Cscape ang proseso sa pag-tune pinaagi sa paghubad niini ngadto sa mga field nga mapuno sa user, lakip ang opsyon alang sa auto-tuning.
4.2 Cscape Interface ug Ladder Logic
Ang mga gimbuhaton sa PID mahimong ma-set up sa daghang lainlaing mga paagi. Ang mosunod nga configuration nagpakita sa PID temperature-controlled oven nga adunay heating coils nga gimaneho sa relay nga nag-activate pinaagi sa PWM output. Ang exampAng programa yano ra kaayo, ug mahimong dili mag-ilustrar sa matag kakuti sa mga gimbuhaton sa PID. Ang pag-ikyas mahimo usab nga mogamit mga analog nga output aron makontrol ang usa ka sistema.
Mubo nga sulat: Walay duha ka programa nga pareho. Gamita ang mosunod isip giya lamang.
- Niining example, ibutang ang usa ka normal nga sirado nga kontak sa sinugdanan sa rung. Doble nga pag-klik niini ug usba ang adres para sa %S001 para sa Unang Pag-scan (FST_SCN).
- Ablihi ang Espesyal nga Operasyon sa Project Toolbox. Pilia ang PID Independent (kung gusto PID_ISA mahimo usab nga gamiton) - tan-awa ang Figure 4.1.
- Ibutang ang PID_IND block sa parehas nga rung.
- Ibutang ang kasagarang bukas nga coil nga gitumong sa target nga output, nga dinhi = %Q0001 (tan-awa ang Figure 4.2) Kung kini nga output kay analogue, gamita ang% AQ0001. Kini nga exampAng paggamit sa usa ka relay aron makontrol ang output sa PWM, mao nga gigamit ang% Q0001

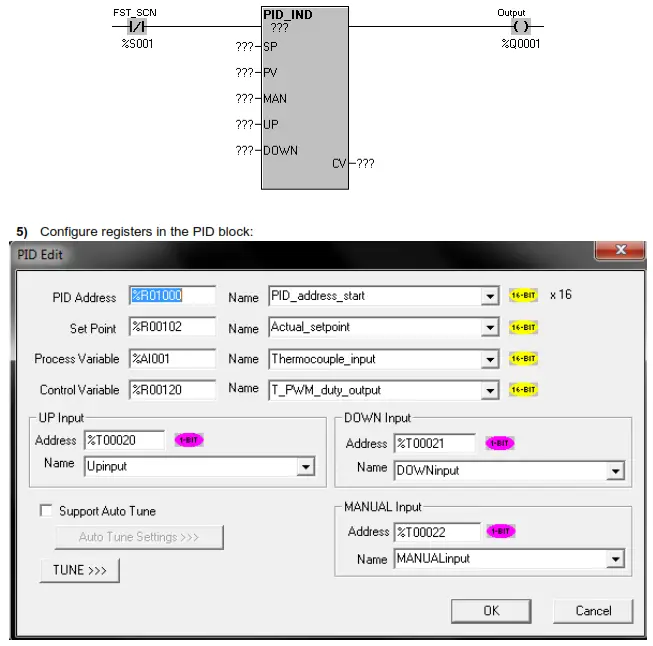
PID Address: Usa ka grupo sa 16 ka sunod-sunod nga mga rehistro nga gamiton sa pagtipig sa mga parametro sa tune nga gamiton sa mga kalkulasyon sa PID (dugang mga detalye sa piho nga mga rehistro sa ulahi) Set Point: Ang Setpoint mao ang bili nga gipaningkamutan nga makab-ot sa PID; ang kantidad nga gitumong sa Process Variable (PV) nga maabot.
Variable sa Proseso: Ang kasamtangan nga bili gikan sa proseso: ang bili nga ang PID naningkamot sa pag-usab
Control Variable: Output sa PID. Ang bili nga gamiton aron makontrol ang proseso aron madala ang Process Variable padulong sa SetPoint
MANUAL nga Input: Manwal / Auto Boolean Switch. Pagsulod og rehistradong adres o pagpili og usa ka ginganlan og rehistro nga mao ang User-controlled Manual Input bit. Kini nga rehistro usa ka Boolean (1-bit) nga rehistro, kasagaran %T.
UP input: Manual Mode up adjustment input. Pagsulod ug rehistradong adres o pagpili og usa ka gihinganlan nga rehistro nga maoy kontrolado sa Gumagamit nga UP Input bit. Kini nga rehistro usa ka Boolean (1-bit) nga rehistro, kasagaran %T.
DOWN input: Manual Mode down adjustment. Pagsulod og rehistradong adres o pagpili og usa ka gihinganlan nga rehistro nga kontrolado sa Gumagamit DOWN Input bit. Kini nga rehistro kay usa ka Boolean (1-bit) nga rehistro, kasagaran %T Support AutoTune: Enable auto-tune 6) Input Degrees Celcius ngadto sa INT Setpoint para sa PID block
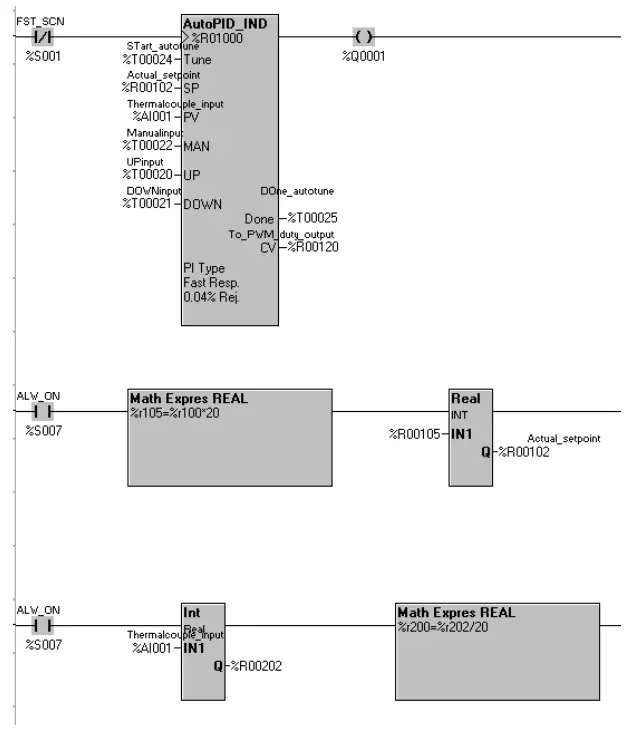
Pagbutang ug Math Expres Real block nga adunay %S007 ALW_ON nga kontak para ipatin-aw ang “%R105=%r100*20” Dayon, i-configure ang REAL ngadto sa INT block para ma-convert ang value ngadto sa %R00102, nga mao ang Actual_setpoint. (Tan-awa sa ubos)
Mubo nga sulat: Niining exampUg, ang %R00100 gipahimutang isip usa ka ma-edit nga field sa usa ka screen. Ang user nagtakda og temperatura sa degrees Celsius, unya kini nga rung nag-convert sa maong numero ngadto sa integer nga gigamit sa PID function block. Ang %R00105 naglihok isip usa ka placeholder alang sa bili samtang kini moagi sa pagkakabig

7) Thermocouple Input Display sa Degrees Celcius
Pagbutang ug INT ngadto sa TINUOD nga function block nga adunay %S007 ALW_ON nga kontak aron ma-convert ang integer input sa %AI001 thermocouple_input value ngadto sa tinuod nga numero sa %R202. Dayon, i-configure ang usa ka Math Expres REAL block sa rung aron ma-convert ang %R202 thermocouple input ngadto sa degrees Celsius para sa display screen (%R200).
Mubo nga sulat: Niining example, %R200 ang gamiton sa pagpakita sa screen isip aktuwal nga temperatura sa degrees Celsius. Kung Fahrenheit ang gusto, ilisan lang ang equation sa Math Express REAL box para ma-convert sa lain nga sukod.

8) Paghimo og mga screen nga adunay gamit sa pagpakita o pag-usab sa pipila ka mga natad sa programa, sama sa pag-ilis sa setpoint sa %R102 sa ibabaw, o pagpakita sa temperatura sa graph nga porma sa temperatura nga input gikan sa thermocouple, sama sa %R200 sa ibabaw. Usab, bisan ang mga slide bar o ma-edit nga mga natad mahimong mabuhat sa mga screen aron mas dali ug dali ang pag-usab sa mga termino sa PID alang sa mga katuyoan sa pag-tune.
Ang mosunod nga kodigo nagpakita sa tanang nangaging mga lakang nga nahuman sa Auto-Tune nga gipahimutang sa PID block:
4.3 PWM Mode
Alang sa bisan unsang aplikasyon nga nanginahanglan usa ka digital output (usa ka heater nga gikontrol sa bisan usa ka relay o usa ka digital output) ang PWM mode usa ka kapilian. Kini magbag-o sa gahum nga moagi sa block isip usa ka signal sa PWM. Aron makontrol ang usa ka output niining paagiha ang usa ka coil kinahanglan ibutang sa pikas bahin sa usa ka PID block.
Alang sa PWM mode, ang taas nga clamp ug ubos clamp kinahanglan ibutang sa 32000 ug -32000 matag usa. -32000 kay duty cycle nga 0% ug 32000 kay duty cycle nga 100%,
PWM cycle time: Ang PID cycle time nagtino kung unsa kasubsob ang PID mo-on ug off. Mobalhin kini hangtod kausa sa panahon sa siklo. Kung ang oras sa siklo nahabilin sa 0 ang PID block moagi sa gahum sa matag higayon nga positibo ang kantidad sa CV, ug dili ipasa ang gahum kung negatibo ang kantidad sa CV, usahay kini ang gusto nga paagi sa operasyon.
Ang pagpili sa saktong cycle time para sa operasyon mahimong importante kaayo kay direktang makaapekto kung unsa kasubsob ang imong output mobalhin gikan sa ON ngadto sa OFF. Kung ikaw adunay bisan unsang pisikal nga pagsul-ob tungod sa pagpabalik sa output gikan sa ON ngadto sa OFF (sama sa usa ka relay) makatabang kini nga limitahan kung unsa ka sagad kini magbag-o.
4.4 Mga Setpoint
Kung gigamit ang mga bloke sa PID, ang tanan nga mga parameter sa tuning gitipigan sa command block. Kung gigamit ang %R nga mga rehistro, kini nga datos retentive, nagpasabut nga kini magpabilin sa mga rehistro pagkahuman sa usa ka siklo sa kuryente.
Kung ang programa sa PID ibutang sa lain nga controller, ipuno ang mga rehistro nga adunay kalabotan sa mga gimbuhaton sa PID. Mahimo kini pinaagi sa Move functions o pinaagi sa setpoints.
Kung gamiton ang mga function sa Move, ang impormasyon bahin sa gibuhat sa matag rehistro anaa sa PID control block. Ang mga setpoint mahimong makuha pinaagi sa paggamit sa Save Setpoints button sa PID tuning menu.
Kung gamiton ang mga setpoint, importante nga masiguro nga ang mga setpoints mopuno sa mga kantidad sa PID. Aron mahimo kini, ang CsCape mahimong i-set up aron ma-download ang mga setpoint sa controller.
Adto sa Programa → Mga Opsyon sa Pag-download ug siguroha nga ang checkbox nga nag-ingon nga Setpoint Table gisusi.
4.5 Mga rehistro
Ang duha ka elemento sa PID nanginahanglan usa ka han-ay sa napulo ug unom (16) nga mga rehistro sa WORD (16-bit). Kini kasagaran sa tipo nga %R. Gitawag kini nga Reference Array.
Ang matag elemento sa PID kinahanglang mogamit ug klarong bulag nga Reference Array, bisan pa kon ang mga bili parehas sa anaa na nga elemento sa PID. Wala'y mahimo nga magsapaw sa mga elemento sa PID.
Ang mga rehistro sa offset 0 hangtod 9 kinahanglang ma-configure sa dili pa gamiton ang elemento sa PID.
| Pagrehistro Offset | Parameter | Mga yunit | Sakop | Deskripsyon |
| 0 | Sampang Panahon | 10 mS | 0 hangtod 65535 | Ang pinakamubo nga oras sa 10 mS Increments nga gitugotan tali sa mga solusyon sa PID |
|
1 |
Patay nga Band + |
Ihap sa PV |
0 hangtod 32000 |
Gihubit ang Upper ug Lower Dead Band nga mga limitasyon sa termino sa PV counts. Ang duha kinahanglan nga ibutang sa 0 hangtud nga ang PID ma-tono. Ang usa ka Patay nga Band mahimong gikinahanglan aron mapugngan ang gagmay nga mga pagbag-o sa mga kantidad sa CV tungod sa gamay nga mga kalainan sa sayup. |
|
2 |
Patay nga Band - |
Ihap sa PV |
0 ngadto sa -3200 |
|
| 3 | Proporsyonal nga ganansya (KP) Porsyento | Porsiyento | 0 ngadto sa 327.67% | Nagtakda sa Proportional Gain Factor sa termino sa porsyento. 100 ka set nga kadaugan sa panaghiusa (ganansya sa 1). |
| 4 | Derivative Gain (Kd) | 10 mS | 0 hangtod 327.67
segundos |
Gisulod isip usa ka oras nga adunay resolusyon nga 10 mS. Sa PID equation, kini adunay epekto. |
|
5 |
Integral Rate (KI) |
Gisubli kada 1000 ka segundo | 0 hangtod 32.76
gisubli matag segundo |
Gisulod isip usa ka gidaghanon sa mga gisubli matag segundo. Ang rate sa panagsama. |
| 6 | CV Bias | Mga Ihap sa CV | -32000 ngadto
+32000 |
Gidaghanon sa mga ihap sa CV nga gidugang sa output sa wala pa ang rate ug amplitud clamps. |
| 7 | CV Upper Clamp | Mga Ihap sa CV | -32000 ngadto
+32000 |
Ang usa ka gidaghanon sa mga ihap sa CV nagrepresentar sa labing taas ug labing ubos nga kantidad alang sa CV. CV Upper Clamp kinahanglan nga mas positibo kay sa CV Lower Clamp. |
| 8 | CV Ubos nga Clamp | Mga Ihap sa CV | -32000 ngadto
+32000 |
|
|
9 |
Minimum nga Panahon sa Pagpatay |
Mga segundo sa bug-os nga pagbiyahe |
0 hangtod 32000
segundos sa paglihok 32000 Mga ihap sa CV |
Gitino kung unsa kadali ang pagbag-o sa kantidad sa CV. |
| 10 | Pag-configure sa Pulong | N/A | N/A | Internal nga Paggamit - Ayaw usba kini nga kantidad |
|
11 |
Manwal nga Sugo |
Mga Ihap sa CV |
Pagsubay sa Auto sa Auto Mode; nagbutang sa CV sa Manual Mode | Sa Automatic mode kini nga rehistro nagsubay sa bili sa CV. Sa Manual mode, kini nga rehistro naglangkob sa kantidad nga output sa CV sulod sa clamp ug mga limitasyon. |
| 12 | Internal nga SP | Gigamit sa OCS | N/A | Nagsubay sa SP sa |
| 13 | Internal nga PV | Gigamit sa OCS | N/A | Gisubay ang PV sa |
| 14 | Internal nga CV | Gigamit sa OCS | N/A | Nagsubay sa CV |
| 15 | Oras sa siklo | Segundo | N/A | Oras sa siklo alang sa PWM sa mga segundo |
PAGTUNO
5.1 Tune Parameter
Importante nga mahibal-an kung giunsa ang mga parameter sa PID block function. Sa ubos, gilista ang mga kahulugan sa matag kantidad:
| Parameter | Kahubitan |
| Sampang Panahon: | Ang oras nga gitugot tali sa mga kalkulasyon sa PID, mao kung unsa kasubsob ang tigkontrol magkalkula sa usa ka bag-ong kantidad sa CV. |
| Patay nga Band +/- | Ang patay nga banda gigamit aron mapugngan ang gagmay nga mga pagbag-o sa Control Variable nga mga kantidad nga mahimong hinungdan sa gagmay nga mga pagbag-o sa variable sa proseso samtang nagkaduol kini sa setpoint. Naghimo kini usa ka lainlaing mga kantidad sa palibot sa setpoint, kung ang variable sa proseso naa sa sulod niini nga range, nan ang control variable dili mausab. |
| Proporsyonal nga ganansya (Kp): | Kini ang kantidad nga nakuha nga direktang nalangkit sa karon nga kantidad sa sayup, kini ang KP gikan sa PID equation. |
| Derivative Gain (Kd): | Alang sa kadaghanan sa mga aplikasyon ang Derivative Gain dili kinahanglan. Kini nga ganansya nga kantidad gisulod sa usa ka resolusyon nga 10mS, kini nga kantidad gigamit aron ang kontrol nga variable motubag sa kalit nga pagbag-o sa proseso nga variable |
| Integral nga Gain (Ki): | Ang integral nga ganansya gigamit aron madala ang kasagaran nga kantidad sa variable nga proseso nga parehas sa gitakda nga punto sa paglabay sa panahon. Mahimo kini pinaagi sa paggamit sa usa ka integral aron makit-an ang tibuuk nga sayup sa usa ka gihatag nga yugto sa panahon ug maghimo usa ka pag-adjust sa variable sa Control. Kung ang variable sa proseso layo sa setpoint sa taas nga yugto sa panahon, kini nga pagpihig mahimong madugangan. Kung natukod na kini mahimo’g magdugay aron mabag-o, kini usa ka butang nga bantayan sa mga proseso nga mahimo’g magdugay sa usa ka set nga punto ug dayon maghimo usa ka dako nga pagbag-o sa lain. |
| Bias sa CV: | Kini usa ka kantidad nga idugang sa Control variable pagkahuman sa pagkalkula. Ang kontrol variable kalkulado, ang bias idugang sa, ug dayon ang bisan unsang slew o ampang mga limitasyon sa litude mo-epekto. |
| CV taas ug ubos nga clamp: | Ang kontrol variable dili mahimong mas taas kaysa sa taas nga clamp ug dili kini mahimong ubos sa ubos nga clamp. Kini makasiguro nga ang imong control variable magpabilin sulod sa gitakda nga range. |
| Minimum nga Panahon sa Pagpatay: | Limitado niini kung unsa kadali ang pagbag-o sa Control variable. Ang mga yunit mao ang gidaghanon sa mga segundo nga gikinahanglan aron mobalhin gikan sa 0 ngadto sa 32000, mao nga ang slew rate nga 64 magtugot sa control variable nga mausab nga dili molapas sa 500 ka ihap kada segundo. |
| Oras sa Siklo (PWM mode lamang): | Kini ang siklo sa katungdanan alang sa PWM output functionality sa mga segundo, kini mahimong gamiton aron limitahan kung unsa ka subsob ang output mobalhin gikan sa ON ngadto sa OFF. Kung kini ibilin sa 0, ang block mopasa sa gahum kung ang CV 0 o mas dako, ug dili mopasa sa gahum kung ang CV mas ubos sa 0. |
5.2 Manwal nga Tuning
Manwal nga Tuning KP
Alang sa daghang mga aplikasyon ang usa ka dali nga manual tuning mao ra ang kinahanglan, kadaghanan sa mga aplikasyon mogamit usa ka kantidad sa KP ug usa ka gamay nga kantidad sa KI. Kung nagtakda sa mga inisyal nga kantidad, makatabang kini view ang PID sa termino sa matematika. Example: Alang sa usa ka temperatura control aplikasyon, aron sa paghukom diin ang KP bili kinahanglan magsugod sa paghunahuna sa mga termino sa
temperatura:
- Kay example, aron ang output mahimong labing taas (32,000) kung ang akong temperatura labing menos 20 ° ubos sa setpoint
- I-convert ang 20° ngadto sa hilaw nga ihap gikan sa usa ka analog input, kung ang input adunay resolusyon nga 0.05° nan kini naghatag ug hilaw nga ihap sa 400
- Ang equation nga adunay kanunay nga ganansya mao ang CVOUT = KP*Error, tungod kay nahibal-an ang CVOUT ug ang Error, sulati ang equation 32000 = KP*400 32000/400 = KP KP = 80
- Karon kami adunay usa ka punto sa pagsugod alang sa KP, hinungdanon nga sulayan kini sa aktwal nga aplikasyon
Manwal nga Tuning KI
Alang sa kadaghanan sa mga aplikasyon, ang KI nga kantidad dili kinahanglan nga dako kaayo. Adunay ubay-ubay nga mga butang nga ikonsiderar sa pagtino kung unsang klase sa KI nga kantidad ang kinahanglan sa imong aplikasyon.
Ang paagi sa paglihok sa integral nga kantidad mao nga gikinahanglan ang integral sa sayup sa usa ka yugto sa panahon ug idugang kini sa usa ka "dili makita" nga bias sa CV. Magpadayon kini nga motaas o mokunhod hangtod nga ang imong PV mag-average nga mahimong imong set point.
Kung ang proseso hinay, pagbantay alang sa usa ka dako nga kantidad niining "dili makita" nga pagpihig. Kung adunay pagbag-o sa setpoint, kini nga kantidad mahimo’g dili dali nga mabag-o ug mahimo’g mohinay ang oras sa pagtubag sa imong sistema.
Ang Math:
Integral_Bias = Integral_Bias + Ki*.001(dt, oras nga nilabay sukad sa kataposang pagsukod sa mga segundos)*error
Alang sa kayano, tan-awa ang pagtaas sa usa ka segundo ug hunahunaa nga sa gidugayon sa ikaduha ang variable sa proseso nagpabilin nga wala mausab.
Example(s): SetPoint = 1000, ang process variable = 800
| Ki | Pagbag-o sa Control variable kada segundo |
| 100 | 20 |
| 250 | 50 |
| 600 | 120 |
| 1000 | 200 |
Ang dakong kapeligrohan nga adunay integral mao nga kini kanunay nga aktibo. Kung ang usa ka proseso magsugod sa usa ka set nga punto nga 5000, ang proseso nga variable magsugod sa 2000, ug ang proseso variable mokabat ug 3 minutos aron makaabot sa set point, nianang panahona nga adunay Ki nga kantidad nga 100 nianang panahona ang Bias anaa sa usa ka bili sa 27000 nga ihap. Kini lagmit nga mosangpot sa usa ka mahinungdanon nga overshoot alang sa proseso variable.
5.3 Auto-Tuning sa PID Block
| Mga setting alang sa PID Auto-Tune | |
| Pagsugod sa Auto-Tune Address | Usa ka 1-bit nga adres nga ibutang nga taas sa panahon sa proseso sa auto-tune |
| Awtomatikong Tune nga Nahuman nga Address | Usa ka 1-bit nga adres nga ibutang nga taas pagkahuman sa proseso sa auto-tune makompleto |
| Auto-Tune Type | Usa ka drop-down menu aron mapili ang klase sa tuning nga buhaton. Ang tulo ka letra matag usa nagbarog alang sa usa ka matang sa ganansya Proportional, Integral, Derivative. Ang tanan nga tulo mahimong mapili, Proporsyonal ug Integral, o Proporsyonal lang. (PID, PI, o P matag usa) |
| Pagsala sa Kasaba | Ang pagsala sa kasaba nagtino kon unsa ka dako sa ibabaw ug ubos sa gitakda nga punto ang proseso sa Auto-Tune kinahanglan nga moadto aron makuha ang pagsukod niini. Kini magpugong sa kasaba sa sukod gikan sa pagsenyas nga ang auto Tune nakaabot sa gitinguha nga set point sa wala pa ang pagkahamtong. Ang porsyentotage gibase sa tibuok nga sukod (32000 nga ihap) ug gikan sa 0.04% (~13 ka ihap) ngadto sa %5 (1600 ka ihap) |
| Tubag sa Controller | Gitino ang "katulin" sa tubag nga gi-auto-tuned. Paspas magpatunghag pipila ka overshoot apan mas paspas nga moabot sa set point, Medium mohimo og gamay nga overshoot ug moabut sa set point nga mas hinay, Hinay-hinay dili makahatag ug overshoot, Hinay kaayo Mahimong kinahanglan nga pilion alang sa usa ka proseso nga "gawas sa labing kaayo nga range alang sa mga lagda sa Zeigler-Nichols" - sensitibo kaayo nga mga sistema |
| Tune sa 2/3 Setpoint | Gitugotan ang eksperimento sa auto-tuning nga usbon ang output base sa 2/3 sa set point. Gamita kini nga opsyon kung dili gusto nga ang proseso mobiyahe labaw sa gitakda nga punto atol sa eksperimento sa auto-tuning. |
Sa wala pa ang Autotuning siguroha nga i-set up ang mosunod nga mga kantidad sa PID block:
- Pagtudlo
- Sampang Panahon
- Ibabaw ug ubos nga Clamp
- Sayop nga Termino,
- Output Polarity
Kung naa na ang tanan nga mga setting, ibutang ang Start Auto-Tune bit High (bisan sa Data Watch o sa code) Ang sistema ang mokontrol ug magpahinabo sa Process Variable nga moadto sa ibabaw ug ubos sa setpoint, sa daghang mga higayon pagkahuman niini. gikuha ang tanan nga mga sukod nga gikinahanglan niini ang AutoTune_Done bit mahimong taas ug ang PID block mobalik sa katapusan nga kahimtang niini uban ang "optimized" nga Proportional, Derivative, ug Integral nga mga bili sa lugar. Sa CsCape ablihi ang PID block aron tan-awon ang mga kantidad, i-save kini isip bag-ong setpoints o isulat kini alang sa umaabot nga paggamit.
TEKNSIYAL NGA SUPORTA
Amihanang AMERIKA
Telepono: 317-916-4274
Fax: 317-639-4279
http://www.heapg.com
Email: techsppt@heapg.com
EUROPE
Telepono: +353-21-4321266
Fax: +353-21-4321826
http://www.horner-apg.com
Email: tech.support@horner-apg.com
Mga Dokumento / Mga Kapanguhaan
 |
HORNER Cscape PID Systems ug Controllers [pdf] Giya sa Gumagamit Cscape PID Systems ug Controllers |



