![]()
MAN1014-01-EN
Flýtileiðarvísir
Cscape PID flýtileiðbeiningar
PID stillingar og stillingar Flýtileiðarvísir
FRAMKVÆMD
Eftirfarandi handbók virkar sem kynning fyrir notendur PID (Proportional Integral Derivative) kerfa og stýringar, og hvernig á að setja upp og stilla PID lykkju í Cscape með Horner OCS. Upplýsingar í þessari handbók virka sem viðbótarupplýsingar við Cscape hjálparhlutann sem nær yfir PID. Hægt er að nota PID úttak í ýmsum forritum og öll kerfi eru mismunandi, þannig að upplýsingarnar sem gefnar eru upp í eftirfarandi handbók munu aðeins virka sem grundvallaruppsetning.
Leiðbeiningin er skrifuð til að byrja á grunnreglum PID-stýringa fyrir þá sem eru kannski ekki eins vel að sér í ferlinu, og byggja síðan inn í að beita og stilla PID-kerfi í Cscape.
Farið verður yfir eftirfarandi efni:
- Kynning á PID
- PID grundvallaratriði
- Horner OCS Cscape stillingar
- Stilling
ATH: Ekki verður öllum ranghala PID útskýrt hér, en fullnægjandi upplýsingar til að geta stjórnað grunnlykkjum með Cscape.
Fyrir myndband á PID okkar Webinar SMELLTU HÉR
INNGANGUR
PID aðgerðir eru úttak sem breyta eða stjórna efnislegum eiginleikum í kerfi. Fyrir nýja notendur getur stillt PID kerfi valdið ruglingi og gremju. FyrrverandiampLesa af PID aðgerðum er hægt að sjá í kerfum sem fylgjast með og breyta þrýstingi, hitastigi, hraða, rúmmáli osfrv. Til dæmis, loftræsti hitastillir gefur skýra mynd sem auðvelt er að útskýra. HVAC hitastillir til heimilisnota er stilltur á ákveðið kyrrstöðuhitastig, Setpoint í PID kerfi. Einingin mælir umhverfishita heimilisins á hverjum tíma og myndar Process Variable, sem er á hreyfingu. Mismunurinn á stillipunkti og ferlisbreytu er nefndur villan sem PID kerfið notar til að reikna út úttakið aftur til hitastillisins til að halda hitastigi við settpunktinn. Þetta ferli er venjulega í stöðugu, lokaðri lykkjuástandi sem myndi halda stöðugu hitastigi (gæti ekki verið orkusparandi fyrir loftræstikerfi til að nota PID lykkjur). Hér að neðan er mynd af grunn PID kerfi:
 Engan hluta þessarar útgáfu má afrita nema með fyrirfram samþykki og skriflegu leyfi Horner APG, LLC. Upplýsingar í þessu skjali geta breyst án fyrirvara.
Engan hluta þessarar útgáfu má afrita nema með fyrirfram samþykki og skriflegu leyfi Horner APG, LLC. Upplýsingar í þessu skjali geta breyst án fyrirvara.
PID skilmálar
Hlutfallslegt gildi - "KP"
Hlutfallsgildið (KP) (stundum kallað Gain) breytir úttakinu í hlutfalli við núverandi villugildi. Hlutfallsgildið breytir mestu úttakinu í PID kerfi og ætti það að vera upphafspunktur í stillingarferlinu (sem verður útskýrt nánar síðar). Hins vegar, ef hlutfallsleg gildisbreyting er of mikil, getur það leitt til óstöðugs kerfis. Lítill hlutfallslegur ávinningur leiðir til mjög lítillar úttaksbreytingar, sem getur verið of lítil fyrir stóra inntaksvillu, sem veldur minna móttækilegri (næmari) stjórnanda.
Einungis hlutfallsstýring mun ekki setjast við markgildi en mun halda stöðugri skekkju – fall af hlutfallslegum ávinningi og ferlihagnaði.
Því hærra sem hlutfallslegur ávinningur % er, því meiri breyting á framleiðslunni.
Heildargildi – „KI“
Heildargildið (KI) lítur á uppsöfnun fyrri villna til að reikna út næstu gildisbreytingu fyrir reikniritið, þannig að hægt er að sýna það sem breytingu á gildi yfir tiltekinn tíma. Heildargildið flýtir fyrir hreyfingu ferlisins í átt að settpunkti og útilokar afgangsstöðugigtarskekkju sem á sér stað með hlutfallsstýringu eingöngu. Ferlið miðar að því að minnka jafnvægisskekkju í núll, skapa stöðugt og skilvirkt PID kerfi.
PI stýringar eru algengasta tegund stjórnunar, þar sem þeir geta venjulega náð stöðugleika á ákveðnum punkti án þess að þörf sé á Afleiðuhugtakinu. Hins vegar þarf stundum afleiðugildi til að koma á stöðugleika í PID lykkjuna eða auka svörun. Því hærra sem „endurtekningar/sek“ gildi heildartímans, því meiri verður breytingin. Verið varkár um ofskot.
Afleiðugildi – „Kd“
Afleiðugildið (Kd) er í réttu hlutfalli við breytingahraða ferlibreytunnar. Afleiðuhugtakið varpar núverandi breytingahraða inn í framtíðina um ákveðinn fjölda sekúndna og gerir ráð fyrir breytingum á villunni. Að bæta afleiðuhugtakinu við PI lykkju getur leitt til móttækilegra eða hraðari lykkju vegna þess að það gerir ráð fyrir stærri P og I hagnaði. Afleiðugildi er spáð í sekúndum, sem þýðir fjölda sekúndna sem gildið mun varpa inn í framtíðina til að sjá fyrir hraða breytinganna.
Hins vegar, ef það er kerfishávaði í PID lykkjunni eða sveiflur, getur D hugtakið hækkað hin gildin og valdið því að PID reiknirit lykkjan missir stjórn, sem gerir lykkjuna í raun óáreiðanlega.
Afleiðugildi geta leitt til hraðari lykkjusvörunar, en vertu á varðbergi gagnvart hávaða í kerfinu. Byrjaðu án og bættu við ef þarf.
Að setja allt saman
Hér að neðan er grunnrit sem útskýrir hvernig PID virkar almennt þegar það er hækkað, sem mun hjálpa í eftirfarandi „Stillingar“ og „Tuning“ hluta:
Athugið: Hvert kerfi er einstakt, þannig að eftirfarandi tafla útskýrir aðeins almenn tengsl.
| Gildi | Uppgangstími | SetPoint yfirskot | Uppgjörstími | Stöðugt ástandsvilla |
| Hlutfallsleg | Minnkar | Hækkar | – | Minnkar |
| Óaðskiljanlegur | Minnkar | Hækkar | Hækkar | Dreifist |
| Afleiða | – | Minnkar | Minnkar | – |
FLJÓÐARSTILLINGAR
4.1 Val á PID aðgerð Block
Það eru tvær mismunandi PID blokkaraðgerðir í Cscape: Óháð og ISA. Báðir PID blokkir nota setpunkt og ferli breytu til að breyta stýribreytu með því að nota stillt reiknirit. Báðir PID blokkir munu leiða sömu lausnina, en nota mismunandi jöfnur:
ISA: CVOUT = KP*(Villa + (KI*Villa*Dt/Ti) + (Kd*Afleiða)) + CVBias.
Óháður:
CVOUT = KP*Villa + (KI *Villa*Dt/Ti) + (Kd*Afleiða) + CVBias
Fyrir meirihluta forrita væri hægt að nota aðra hvora PID aðgerðina til að stilla kerfi. Independent PID blokkin er almennt algengari. Í ISA kubbnum er KP margfaldað með margfeldi (Villa + (KI*Villa*Dt/Ti), sem myndi örlítið breyta því hvernig gildin hafa samskipti meðan á stillingarferlinu stendur, en þau koma bæði að sömu lokaniðurstöðu.
Einfalda stærðfræðilega jöfnan hér að ofan getur valdið ruglingi þegar farið er í gegnum stillingarferlið. Cscape aðgerðablokkin auðveldar stillingarferlið með því að þýða það yfir í reiti sem notandinn getur fyllt út, þar á meðal valmöguleika fyrir sjálfvirka stillingu.
4.2 Cscape tengi og stiga rökfræði
Hægt er að setja upp PID aðgerðir á marga mismunandi vegu. Eftirfarandi uppsetning sýnir PID hitastýrðan ofn með hitaspólum sem knúin er áfram af gengi sem virkjar með PWM útgangi. FyrrverandiampLe forritið er mjög einfalt og sýnir kannski ekki allar flóknar PID aðgerðir. Escape getur einnig notað hliðstæða úttak til að stjórna kerfi.
Athugið: Engin tvö forrit eru eins. Notaðu eftirfarandi eingöngu sem leiðbeiningar.
- Í þessu frvampl, settu venjulega lokaða snertingu í upphafi þrepsins. Tvísmelltu á það og breyttu heimilisfangi %S001 fyrir fyrstu skönnun (FST_SCN).
- Opnaðu Special Operations í Project Toolbox. Veldu PID óháð (ef þess er óskað er einnig hægt að nota PID_ISA) – sjá mynd 4.1.
- Settu PID_IND kubbinn á sama þrep.
- Settu venjulega opna spólu sem beint er að markútgangi, sem hér = %Q0001 (sjá mynd 4.2) Ef þetta úttak er hliðstætt, notaðu %AQ0001. Þetta frvample notar gengi til að stjórna PWM úttak, þannig að %Q0001 er notað

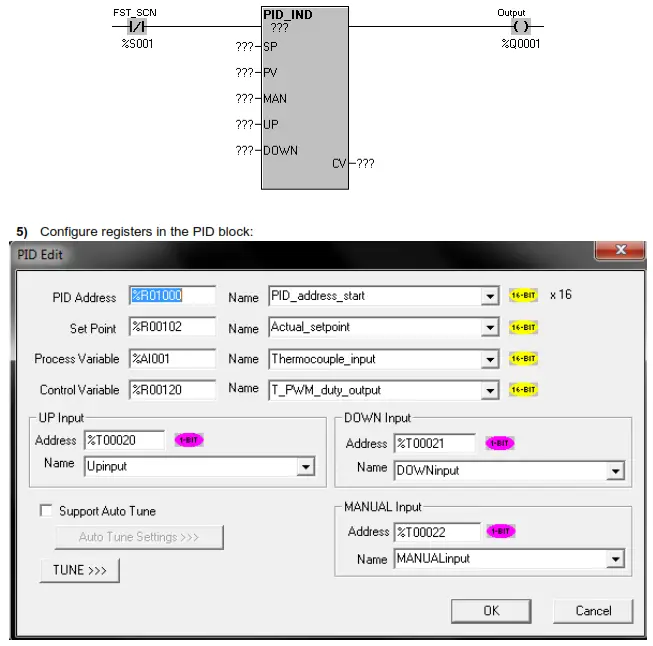
PID heimilisfang: Hópur af 16 samfelldum skrám sem verða notaðir til að geyma stillingarfæribreytur til að nota í PID útreikningum (nánari upplýsingar um sérstakar skrár síðar) Setpoint: Setpoint er gildið sem PID er að reyna að ná; gildið sem Process Variable (PV) stefnir að.
Ferlisbreyta: Núverandi gildi úr ferlinu: gildið sem PID er að reyna að breyta
Stjórnarbreyta: Úttak PID. Gildið sem verður notað til að stjórna ferlinu til að koma ferlibreytunni í átt að SetPoint
HANDLEGT inntak: Handvirkur / sjálfvirkur Boolean rofi. Sláðu inn skráð heimilisfang eða veldu nafngreinda skrá sem er notendastýrður handvirkur inntaksbiti. Þessi skrá er Boolean (1-bita) skrá, venjulega %T.
UP inntak: Handvirk stilling uppstillingarinntak. Sláðu inn skráð heimilisfang eða veldu nafngreinda skrá sem er notendastýrður UP-inntaksbiti. Þessi skrá er Boolean (1-bita) skrá, venjulega %T.
NIÐUR inntak: Handvirk stilling niðurstilling. Sláðu inn skráð heimilisfang eða veldu nafngreinda skrá sem er notendastýrður DOWN Input biti. Þessi skrá er Boolean (1-bita) skrá, venjulega %T Stuðningur AutoTune: Gerir sjálfvirka stillingu kleift 6) Inntaksgráður á Celsíus til INT Setpoint fyrir PID blokk
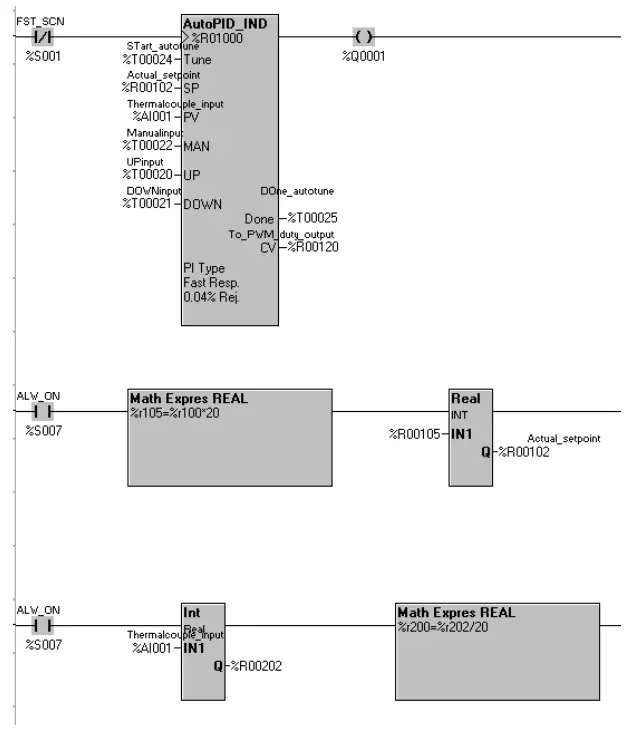
Stilltu Math Express Real blokk með %S007 ALW_ON tengilið til að skilgreina „%R105=%r100*20“ Stilltu síðan REAL í INT blokk til að umbreyta gildinu í %R00102, sem er Raunverulegt_settpunkt. (Sjá fyrir neðan)
Athugið: Í þessu frvample, %R00100 er sett upp sem breytanlegur reitur á skjá. Notandinn stillir hitastig í gráðum á Celsíus, síðan breytir þetta þrep þeirri tölu í heiltölu sem PID fallblokkinn notar. %R00105 virkar sem staðgengill fyrir gildið þegar það fer í gegnum umbreytinguna

7) Inntaksskjár hitaeininga í gráðum á Celsíus
Settu INT til REAL fallblokk með %S007 ALW_ON tengilið til að umbreyta heiltöluinntaki %AI001 thermocouple_input gildisins í rauntölu við %R202. Stilltu síðan Math Expres REAL blokk á þrepinu til að breyta %R202 hitaeiningainntakinu í gráður á Celsíus fyrir skjáskjáinn (%R200).
Athugið: Í þessu frvample, %R200 verður notað til að birta á skjánum sem raunverulegt hitastig í gráðum á Celsíus. Ef Fahrenheit er valinn skaltu einfaldlega skipta út jöfnunni í Math Express REAL reitnum til að breyta í aðra mælingu.

8) Búðu til skjái sem hafa virkni til að sýna eða breyta ákveðnum sviðum forritsins, eins og að breyta stillingarpunkti með %R102 hér að ofan, eða sýna hitastigið á línuriti af hitainntakinu frá hitaeiningunni, eins og %R200 hér að ofan. Einnig er hægt að búa til annað hvort rennastikur eða breytanlega reiti á skjánum til að gera það auðveldara og fljótlegra að breyta PID skilmálum handvirkt til að stilla.
Eftirfarandi kóði sýnir öll fyrri skref sem lokið var með Auto-Tune uppsetningu á PID blokkinni:
4.3 PWM ham
Fyrir öll forrit sem krefjast stafræns úttaks (hitara sem er stjórnað af annað hvort gengi eða stafrænu útgangi) er PWM-stilling valkostur. Þetta mun breyta kraftinum sem fer í gegnum blokkina sem PWM merki. Til þess að stjórna útgangi á þennan hátt verður að setja spólu hinum megin á PID blokk.
Fyrir PWM ham, háa clamp og lágt clamp verður að vera sett á 32000 og -32000 í sömu röð. -32000 er 0% vinnulota og 32000 er 100% vinnulota,
PWM hringrásartími: PID hringrásartíminn ákvarðar hversu oft PID mun kveikja og slökkva á. Það mun skipta upp í einu sinni á hringrásartímanum. Ef hringrásartíminn er skilinn eftir á 0, mun PID-blokkin gefa afl þegar CV gildið er jákvætt, en ekki framhjá krafti þegar CV gildið er neikvætt, stundum er þetta æskilegi notkunaraðferðin.
Að velja réttan lotutíma fyrir aðgerðina getur verið mjög mikilvægt þar sem það hefur bein áhrif á hversu oft úttakið þitt mun skipta úr KVEIKT í SLÖKKT. Ef þú ert með líkamlegt slit sem stafar af því að kveikja á úttakinu úr ON í OFF (eins og í gengi) mun þetta hjálpa til við að takmarka hversu oft það breytist.
4.4 Stillingar
Þegar PID blokkir eru notaðar eru allar stillingarfæribreytur geymdar í skipanablokkinni. Ef %R skrár eru notaðar eru þessi gögn varðveitt, sem þýðir að þau verða áfram í skránum eftir aflhring.
Ef PID forritið verður sett í annan stjórnanda, fylltu út skrárnar sem tengjast PID aðgerðum. Þetta er hægt að gera með Move-aðgerðum eða í gegnum stillingar.
Þegar Move-aðgerðir eru notaðar eru upplýsingar um hvað hver skrá gerir tiltækar í PID-stýringarblokkinni. Hægt er að fá stillingar með því að nota Save Setpoints hnappinn í PID stillingarvalmyndinni.
Þegar stillingar eru notaðar er mikilvægt að ganga úr skugga um að stilligildin fylli út PID gildin. Til að gera það er hægt að setja upp CsCape til að hlaða niður stillingum í stjórnandann.
Farðu til Forrit → Niðurhalsvalkostir og vertu viss um að hakað sé við gátreitinn sem segir Setpoint Tafla.
4.5 skrár
Báðir PID þættirnir þurfa fylki sextán (16) WORD (16 bita) skráa. Þetta eru venjulega af gerðinni %R. Þetta er kallað Reference Array.
Hver PID-eining verður að nota sérstakt tilvísunarfylki, jafnvel þótt gildin séu eins og núverandi PID-eining. Það getur ekki verið skörun PID þátta.
Skrár með offset 0 til 9 verða að vera stilltar áður en PID einingin er notuð.
| Skráðu þig Offset | Parameter | Einingar | Svið | Lýsing |
| 0 | Sample Tímabil | 10 mS | 0 til 65535 | Stysti tíminn í 10 mS stigum sem leyfður er á milli PID lausna |
|
1 |
Dauð hljómsveit + |
PV telur |
0 til 32000 |
Skilgreinir efri og neðri mörk dauðasviðs með tilliti til PV talna. Bæði ætti að vera stillt á 0 þar til PID er stillt. Dautt band gæti þá verið nauðsynlegt til að koma í veg fyrir litlar breytingar á CV gildi vegna lítilsháttar breytileika í villum. |
|
2 |
Dauð hljómsveit - |
PV telur |
0 til -3200 |
|
| 3 | Hlutfallslegur hagnaður (KP) Hlutfall | Hlutfall | 0 til 327.67% | Stillir hlutfallslegan ávinningsstuðul í prósentum. 100 sett einingahagnaður (hagnaður af 1). |
| 4 | Afleidd hagnaður (Kd) | 10 mS | 0 til 327.67
sekúndur |
Sláið inn sem tími með 10 mS upplausn. Í PID jöfnunni hefur þetta áhrif. |
|
5 |
Heildarhlutfall (KI) |
Endurtekið á 1000 sekúndur | 0 til 32.76
endurtekningar á sekúndu |
Fært inn sem fjöldi endurtekningar á sekúndu. Samþættingarhlutfallið. |
| 6 | CV hlutdrægni | Ferilskrá telur | -32000 til
+32000 |
Fjöldi ferilskrártalninga bætt við framleiðsluna á undan genginu og amplitude clamps. |
| 7 | CV Efri Clamp | Ferilskrá telur | -32000 til
+32000 |
Fjöldi ferilskrártalna táknar hæsta og lægsta gildið fyrir ferilskrá. CV Efri Clamp verður að vera jákvæðari en CV Lower Clamp. |
| 8 | CV Neðri Clamp | Ferilskrá telur | -32000 til
+32000 |
|
|
9 |
Lágmarks slagtími |
Sekúndur af fullri ferð |
0 til 32000
sekúndur til að færa 32000 Ferilskrá telur |
Ákveður hversu hratt CV gildi getur breyst. |
| 10 | Stilla Word | N/A | N/A | Innri notkun - Ekki breyta þessu gildi |
|
11 |
Handvirk stjórn |
Ferilskrá telur |
Rekja sjálfvirkt í sjálfvirkri stillingu; setur ferilskrána í handvirka stillingu | Í sjálfvirkri stillingu rekur þessi skrá CV gildið. Í handvirkri stillingu inniheldur þessi skrá gildið sem er gefið út á CV innan clamp og drap takmörk. |
| 12 | Innri SP | Notað af OCS | N/A | Lög SP inn |
| 13 | Innri PV | Notað af OCS | N/A | Fylgir PV inn |
| 14 | Innri ferilskrá | Notað af OCS | N/A | Fylgir ferilskrá út |
| 15 | Hringrásartími | Sekúndur | N/A | Hringrásartími fyrir PWM í sekúndum |
STÖLLUN
5.1 Stilla færibreytur
Það er mikilvægt að vita hvernig færibreyturnar í PID blokkinni virka. Hér að neðan eru skilgreiningar fyrir hvert gildi taldar upp:
| Parameter | Skilgreining |
| Sample Tímabil: | Tíminn sem leyfir á milli PID útreikninga er hversu oft stjórnandinn mun reikna út nýtt CV gildi. |
| Dauð hljómsveit +/- | Dauða bandið er notað til að koma í veg fyrir litlar breytingar á stýribreytugildum sem geta stafað af litlum breytingum á ferlibreytunni þegar hún nálgast settpunktinn. Þetta skapar svið gilda í kringum settpunktinn, ef ferlibreytan er innan þess bils, þá mun stýribreytan ekki breytast. |
| Hlutfallslegur hagnaður (Kp): | Þetta er ávinningsgildið sem er beint tengt núverandi villugildi, þetta er KP úr PID jöfnunni. |
| Afleidd hagnaður (Kd): | Fyrir flest forrit er afleidd hagnaður óþarfi. Þetta ávinningsgildi er slegið inn með upplausninni 10mS, þetta gildi er notað til að láta stjórnbreytuna bregðast við skyndilegum breytingum á ferlibreytunni |
| Integral Gain (Ki): | Heildaraukinn er notaður til að færa meðalgildi ferlibreytunnar jafnt og settpunkti yfir tíma. Það mun ná þessu með því að nota heild til að finna heildarvilluna yfir tiltekið tímabil og gera aðlögun að stýribreytunni. Ef ferlibreytan er langt í burtu frá settpunktinum í langan tíma getur þessi hlutdrægni byggst upp. Þegar það hefur verið byggt upp getur það tekið smá tíma að breytast, þetta er eitthvað sem þarf að passa upp á í ferlum sem geta dvalið lengi á einum ákveðnum stað og gera síðan miklar breytingar á öðrum. |
| CV hlutdrægni: | Þetta er gildi sem er bætt við stýribreytuna eftir að útreikningur hefur farið fram. Stýribreytan verður reiknuð út, hlutdrægni verður bætt við, og síðan hvaða sleð eða amplitude takmörk munu taka gildi. |
| CV efri og neðri clamp: | Stýribreytan má ekki vera hærri en efri clamp og það má ekki vera lægra en neðri clamp. Þetta mun tryggja að stjórnbreytan þín haldist innan skilgreinds sviðs. |
| Lágmarks slew tími: | Þetta mun takmarka hversu hratt stýribreytan mun breytast. Einingarnar eru sekúndnafjöldi sem það tekur að færa sig úr 0 í 32000, þannig að hraðaupphæðin 64 mun láta stjórnbreytuna ekki breytast meira en 500 talningum á sekúndu. |
| Cycle Time (aðeins PWM ham): | Þetta er vinnulotan fyrir PWM úttaksvirknina í sekúndum, þetta er hægt að nota til að takmarka hversu oft úttakið mun skipta úr ON í OFF. Ef þetta er skilið eftir við 0 mun kubburinn gefa afl ef ferilskráin er 0 eða meiri, og ekki gefa kraft ef ferilskráin er minni en 0. |
5.2 Handvirk stilling
Handvirk stilling KP
Fyrir mörg forrit er fljótleg handstilling allt sem þarf, flest forrit munu nota KP gildi og lítið KI gildi. Þegar upphafsgildin eru stillt getur verið gagnlegt að view PID hvað varðar stærðfræði. Fyrrverandiample: Fyrir hitastýringarforrit, til að ákveða hvar KP gildið ætti að byrja á að hugsa út frá
hitastig:
- Til dæmisample, til að framleiðsla sé í hámarki (32,000) þegar hitastigið mitt er að minnsta kosti 20° undir settmarkinu
- Umbreyttu 20° í óunnar tölur úr hliðrænu inntaki, ef inntakið hefur 0.05° upplausn þá gefur þetta hrátölu upp á 400
- Jafnan með bara stöðugan ávinning er CVOUT = KP*Villa, þar sem CVOUT og Villa eru þekkt, fylltu út jöfnuna 32000 = KP*400 32000/400 = KP KP = 80
- Nú höfum við upphafspunkt fyrir KP, það er mikilvægt að prófa þetta í raunverulegu forritinu
Handvirk stilling KI
Fyrir flestar umsóknir þarf KI-gildið ekki að vera mjög mikið. Það eru nokkur atriði sem þarf að hafa í huga þegar ákvarðað er hvers konar KI gildi umsókn þín ætti að hafa.
Hvernig heildgildið virkar er að það tekur heildina af villunni yfir ákveðinn tíma og bætir því við „ósýnilega“ hlutdrægni í ferilskrá. Þetta mun halda áfram að aukast eða lækka þar til PV-meðaltalið þitt er settmarkið þitt.
Ef ferlið er hægt skaltu passa þig á miklu gildi í þessari „ósýnilegu“ hlutdrægni. Ef það er breyting á settpunktinum gæti þetta gildi ekki breyst mjög hratt og getur gert viðbragðstíma kerfisins verulega hægari.
Stærðfræðin:
Integral_Bias = Integral_Bias + Ki*.001(dt, tími liðinn frá síðustu mælingu í sekúndum)*villa
Til einföldunar skaltu skoða aukninguna á sekúndu og gera ráð fyrir að meðan á sekúndu stendur haldist ferlibreytan óbreytt.
ExampLe(r): SetPoint = 1000, ferlibreytan = 800
| Ki | Breyting á stýribreytu á sekúndu |
| 100 | 20 |
| 250 | 50 |
| 600 | 120 |
| 1000 | 200 |
Stóra hættan við integral er að það er alltaf virkt. Ef ferli byrjar með 5000 stillingarpunkti byrjar ferlibreytan á 2000 og ferlibreytan tekur 3 mínútur að ná settpunktinum, á þeim tíma með Ki gildi 100 á þeim tíma verður hlutdrægni á gildi af 27000 talningum. Þetta mun líklega leiða til verulegrar framhjáhalds fyrir ferlibreytuna.
5.3 Sjálfvirk stilling á PID blokkinni
| Stillingar fyrir PID Auto-Tune | |
| Byrjaðu sjálfvirka stillingu heimilisfangs | 1-bita vistfang sem verður stillt hátt meðan á sjálfvirkri stillingu stendur |
| Sjálfvirk stilling Lokið heimilisfang | 1-bita vistfang sem verður stillt hátt eftir að sjálfvirka stillingarferlinu er lokið |
| Sjálfvirk stilling | Fellivalmynd til að velja tegund stillingar sem verður gerð. Stafirnir þrír standa hver fyrir tegund af ávinningi Hlutfallslegur, Integral, Afleiða. Hægt er að velja alla þrjá, hlutfallslega og heildstæða, eða bara hlutfallslega. (PID, PI, eða P í sömu röð) |
| Hávaða síun | Hávaðasían ákvarðar hversu mikið fyrir ofan og neðan viðmiðunarpunktinn sjálfvirka stillingarferlið verður að fara til að fá mælingu sína. Þetta kemur í veg fyrir að hávaði í mælingunni gefi til kynna að sjálfvirka stillingin hafi náð æskilega stillingu fyrir tímann. Prósentantage er byggt á fullum mælikvarða (32000 talningar) og er á bilinu 0.04% (~13 talningar) til %5 (1600 talningar) |
| Viðbrögð stjórnanda | Ákvarðar „hraða“ svarsins sem er sjálfvirkt stillt. Hratt mun framkalla einhverja yfirskot en komast hraðar að settu punkti, Miðlungs mun framkalla örlítið yfirskot og koma aðeins hægar að settu punkti, Hægur mun ekki framkalla framhjáhlaup, Mjög hægur gæti þurft að velja fyrir ferli sem er "utan kjörsviðs fyrir Zeigler-Nichols reglur" - mjög viðkvæm kerfi |
| Stilltu á 2/3 stillingu | Leyfir sjálfvirkri stillingartilraun að breyta úttakinu miðað við 2/3 af stillimarkinu. Notaðu þennan valmöguleika þegar ekki er óskað eftir því að ferlið fari fyrir ofan viðmiðunarpunktinn meðan á sjálfvirkri stillingartilraun stendur. |
Áður en sjálfvirk stilling fer fram, vertu viss um að setja upp eftirfarandi gildi í PID blokkinni:
- Setpunktur
- Sample Tímabil
- Efri og neðri Clamp
- Villuskilmálar,
- Pólun úttaks
Þegar allar stillingar eru komnar á sinn stað, stilltu Start Auto-Tune bitann hátt (annaðhvort í Data Watch eða í kóðanum) Kerfið mun taka stjórnina og valda því að Process Variable fer fyrir ofan og neðan setpoint, nokkrum sinnum eftir að það hefur tekið allar þær mælingar sem hann þarfnast mun AutoTune_Done bitinn fara hátt og PID blokkin mun fara aftur í sitt síðasta ástand með „bjartsýni“ hlutfalls-, afleiðu- og heildagildin til staðar. Í CsCape opnaðu PID blokkina til að skoða gildin, annaðhvort vistaðu þau sem ný settpunkta eða skráðu þau til notkunar í framtíðinni.
TÆKNIÐUR stuðningur
NORÐUR AMERÍKA
Sími: 317-916-4274
Fax: 317-639-4279
http://www.heapg.com
Netfang: techsppt@heapg.com
EVRÓPA
Sími: +353-21-4321266
Fax: +353-21-4321826
http://www.horner-apg.com
Netfang: tech.support@horner-apg.com
Skjöl / auðlindir
 |
HORNER Cscape PID kerfi og stýringar [pdfNotendahandbók Cscape PID kerfi og stýringar |



