![]()
MAN1014-01-EN
تڪڙو شروع ھدايت
Cscape PID تڪڙو شروع ھدايت
PID ترتيب ۽ ٽيوننگ تڪڙو شروع ھدايت
اڳيون
هيٺ ڏنل گائيڊ PID (Proportional Integral Derivative) سسٽم ۽ ڪنٽرولرز جي استعمال ڪندڙن لاءِ تعارف جي طور تي ڪم ڪري ٿو، ۽ Cscape ۾ PID لوپ کي Horner OCS سان ڪيئن سيٽ اپ ۽ ترتيب ڏيڻ. ھن ھدايت ۾ ڏنل معلومات PIDs کي ڍڪيندڙ Cscape مدد سيڪشن جي اضافي معلومات طور ڪم ڪري ٿي. PID آئوٽ پُٽ مختلف ايپليڪيشنن ۾ استعمال ڪري سگھجن ٿا، ۽ سڀ سسٽم مختلف آھن، تنھنڪري ھيٺ ڏنل گائيڊ ۾ ڏنل معلومات صرف بنيادي سيٽ اپ طور ڪم ڪندي.
ھدايت انھن لاءِ پي آءِ ڊي ڪنٽرولرز جي بنيادي اصولن سان شروع ڪرڻ لاءِ لکيو ويو آھي جيڪي شايد ان عمل ۾ چڱيءَ طرح واقف نه ھجن، پوءِ Cscape ۾ PID سسٽم کي لاڳو ڪرڻ ۽ ٽيوننگ ڪرڻ لاءِ ٺاھيو.
ھيٺ ڏنل مضمونن کي ڍڪيندا.
- PID جو تعارف
- PID بنيادي
- Horner OCS Cscape ترتيب
- ٽيوننگ
نوٽ: هتي PIDs جي سڀني پيچيدگين جي وضاحت نه ڪئي ويندي، پر Cscape استعمال ڪندي بنيادي لوپس کي منظم ڪرڻ جي قابل ٿي ڪافي معلومات.
اسان جي PID تي هڪ وڊيو لاء Webهتي ڪلڪ ڪريو
تعارف
PID افعال ٻاھر آھن جيڪي ھڪڙي سسٽم ۾ جسماني ملڪيت کي تبديل يا ڪنٽرول ڪن ٿا. نون استعمال ڪندڙن لاءِ، پي آءِ ڊي سسٽم کي ترتيب ڏيڻ مونجهارو ۽ مايوسي پيدا ڪري سگھي ٿو. مثالampPID افعال جا les نظامن ۾ ڏسي سگهجن ٿا جيڪي نگراني ۽ دٻاءُ، گرمي پد، رفتار، حجم وغيره کي تبديل ڪن ٿا. مثال طور، هڪ HVAC ٿرموسٽٽ هڪ آسان وضاحت مهيا ڪري ٿو. هڪ گهريلو HVAC thermostat هڪ مخصوص جامد درجه حرارت تي مقرر ڪيو ويو آهي، هڪ PID سسٽم ۾ هڪ سيٽ پوائنٽ. يونٽ ڪنهن به وقت گهر جي ماحولي حرارت کي ماپي ٿو، هڪ پروسيس ويريبل ٺاهي ٿو، جيڪو فلڪس جي حالت ۾ آهي. SetPoint ۽ Process Variable جي وچ ۾ فرق کي Error چيو ويندو آهي PID سسٽم آئوٽ پُٽ کي واپس ٿرموسٽٽ ڏانهن ڳڻڻ لاءِ استعمال ڪندو آهي ته جيئن گرمي پد کي مقرر پوائنٽ تي رکي سگهجي. اهو عمل عام طور تي هڪ مسلسل، بند لوپ واري حالت ۾ هوندو آهي جيڪو مسلسل درجه حرارت برقرار رکندو آهي (شايد PID لوپس استعمال ڪرڻ لاءِ HVAC لاءِ توانائي موثر نه هجي). هيٺ ڏنل هڪ بنيادي PID سسٽم جو هڪ مثال آهي:
 هن اشاعت جو ڪو به حصو اڳواٽ معاهدي ۽ Horner APG، LLC جي لکيل اجازت کان سواءِ ٻيهر نه ٿو ڏئي سگهجي. هن دستاويز ۾ معلومات بغير نوٽيس جي تبديلي جي تابع آهي.
هن اشاعت جو ڪو به حصو اڳواٽ معاهدي ۽ Horner APG، LLC جي لکيل اجازت کان سواءِ ٻيهر نه ٿو ڏئي سگهجي. هن دستاويز ۾ معلومات بغير نوٽيس جي تبديلي جي تابع آهي.
PID شرطون
متناسب قدر - "KP"
متناسب قدر (KP) (ڪڏهن ڪڏهن سڏيو ويندو آهي) موجوده غلطي جي قيمت جي تناسب ۾ آئوٽ پٽ کي تبديل ڪري ٿو. متناسب قدر هڪ PID سسٽم ۾ پيداوار کي تمام گهڻو تبديل ڪري ٿو، ۽ ان کي ٽيوننگ جي عمل دوران شروعاتي نقطي هجڻ گهرجي (جنهن کي بعد ۾ وڌيڪ تفصيل سان بيان ڪيو ويندو). بهرحال، جيڪڏهن متناسب قدر جي تبديلي تمام گهڻي آهي، اهو نتيجو ٿي سگهي ٿو هڪ غير مستحڪم نظام. ننڍو تناسب حاصل ڪرڻ جو نتيجو تمام ننڍڙو آئوٽ پٽ جي تبديلي ۾، جيڪو تمام ننڍو ٿي سگھي ٿو وڏي ان پٽ جي غلطي لاء، گھٽ جوابي (حساس) ڪنٽرولر جو سبب بڻائين.
صرف متناسب ڪنٽرول ھدف جي قيمت تي آباد نه ٿيندو پر ھڪڙي مستحڪم رياستي غلطي برقرار رکندو - تناسب حاصل ڪرڻ ۽ عمل جي حاصلات جو ھڪڙو ڪم.
جيترو وڌيڪ متناسب نفعو٪، اوتري وڏي اوتري تبديلي.
لازمي قدر - "KI"
Integral Value (KI) الورورٿم لاءِ ايندڙ قدر جي تبديلي کي ڳڻڻ لاءِ ماضي جي غلطين جي جمع تي نظر اچي ٿي، اهڙيءَ طرح بيان ڪري سگهجي ٿو ته ڏنل وقت ۾ قدر ۾ تبديلي. انٽيگرل ويليو پروسيس جي حرڪت کي سيٽ پوائنٽ ڏانهن تيز ڪري ٿو ۽ بقايا مستحڪم رياست جي غلطي کي ختم ڪري ٿو جيڪو صرف تناسب ڪنٽرول سان ٿئي ٿو. ان عمل جو مقصد آھي مستحڪم رياست جي غلطي کي صفر تائين گھٽائڻ، ھڪ مستحڪم ۽ موثر PID سسٽم ٺاھيو.
PI ڪنٽرولر ڪنٽرول جا سڀ کان وڌيڪ عام قسم آهن، ڇاڪاڻ ته اهي عام طور تي هڪ مقرر نقطي تي مستحڪم ٿي سگهن ٿا بغير ڪنهن ڊريويٽيڪل اصطلاح جي. بهرحال، ڪڏهن ڪڏهن هڪ نڪتل قدر جي ضرورت هوندي آهي PID لوپ کي مستحڪم ڪرڻ يا ردعمل وڌائڻ لاءِ. انٽيگرل ٽرم جي ”ٻيهر/سيڪنڊ“ قدر جيتري وڌيڪ هوندي، اوتري وڏي نتيجي واري تبديلي. اوور شوٽنگ کان محتاط رھو.
نڪتل قدر - "Kd"
Derivative Value (Kd) پروسيس متغير جي تبديلي جي شرح سان متناسب آهي. Derivative اصطلاح منصوبي ۾ تبديلي جي موجوده شرح کي مستقبل ۾ مقرر ڪيل سيڪنڊن جي تعداد ۾، غلطي ۾ تبديلين جي توقع ڪندي. PI لوپ ۾ نڪتل اصطلاح کي شامل ڪرڻ سان وڌيڪ جوابي يا تيز لوپ ٿي سگھي ٿو ڇاڪاڻ ته اھو وڏي P ۽ I حاصلات جي اجازت ڏئي ٿو. نڪتل قدر سيڪنڊن ۾ پيش ڪيو ويو آهي، مطلب ته سيڪنڊن جو تعداد جيڪو قدر مستقبل ۾ پروجيڪٽ ڪندو تبديلي جي شرح جو اندازو لڳائڻ لاءِ.
بهرحال، جيڪڏهن PID لوپ يا oscillations ۾ سسٽم شور آهي، D اصطلاح ٻين قدرن کي وڌائي سگھي ٿو ۽ PID الگورٿم لوپ کي ڪنٽرول وڃائي سگھي ٿو، مؤثر طور تي لوپ کي ناقابل اعتبار رينجر ڪري ٿو.
نڪتل قدر تيز رفتار لوپ جي جواب جي ڪري سگھي ٿو، پر سسٽم شور کان محتاط رھو. بغير شروع ڪريو ۽ شامل ڪريو جيڪڏھن ضروري ھجي.
اهو سڀ ڪجهه گڏ ڪرڻ
هيٺ ڏنل هڪ بنيادي چارٽ آهي جيڪو بيان ڪري ٿو ته ڪيئن PID عام طور تي ڪم ڪندو آهي جڏهن وڌايو ويندو آهي، جيڪو هيٺين "ڪانفيگريشن" ۽ "ٽيوننگ" حصن ۾ مدد ڪندو:
نوٽ: هر سسٽم منفرد آهي، تنهنڪري هيٺ ڏنل جدول صرف عام رشتا بيان ڪري ٿو.
| قدر | اڀرندڙ وقت | سيٽ پوائنٽ اوور شوٽ | آباد ٿيڻ وقت | مستحڪم رياستي غلطي |
| متناسب | گھٽائي ٿو | وڌائي ٿو | - | گھٽائي ٿو |
| Integral | گھٽائي ٿو | وڌائي ٿو | وڌائي ٿو | ڊاهي ٿو |
| نڪتل | - | گھٽائي ٿو | گھٽائي ٿو | - |
Escape configuration
4.1 PID فنڪشن بلاڪ چونڊيو
Cscape ۾ ٻه مختلف PID بلاڪ ڪم آهن: آزاد ۽ ISA. ٻئي PID بلاڪ سيٽ پوائنٽ ۽ پروسيس متغير استعمال ڪن ٿا ڪنٽرول متغير کي تبديل ڪرڻ لاء سيٽ الگورتھم استعمال ڪندي. ٻئي PID بلاڪ ساڳيا حل نڪرندا، پر مختلف مساواتون استعمال ڪندا:
ISA: CVOUT = KP*(Error + (KI*Error*Dt/Ti) + (Kd*Derivative)) + CVBias.
آزاد:
CVOUT = KP*Eror + (KI *Error*Dt/Ti) + (Kd*Derivative) + CVBias
ايپليڪيشنن جي اڪثريت لاء، يا ته PID فنڪشن سسٽم کي ٽيون ڪرڻ لاء استعمال ٿي سگهي ٿو. آزاد PID بلاڪ عام طور تي وڌيڪ عام آهي. ISA بلاڪ ۾، KP کي (Error + (KI*Error*Dt/Ti) جي پيداوار سان ضرب ڪيو ويندو آهي، جيڪو ٿورڙي طريقي سان تبديل ڪندو جيئن قدرن جي وچ ۾ رابطي جي عمل دوران، پر اهي ٻئي ساڳئي آخري نتيجي تي ايندا.
مٿي ڏنل سادي رياضياتي مساوات مونجهارو پيدا ڪري سگهي ٿي جڏهن ٽيوننگ جي عمل ذريعي وڃڻ. Cscape فنڪشن بلاڪ ٽوننگ جي عمل کي آسان بڻائي ٿو ان کي فيلڊ ۾ ترجمو ڪندي ان کي استعمال ڪندڙ ڀري سگھي ٿو، بشمول آٽو ٽيوننگ لاءِ اختيار.
4.2 Cscape انٽرفيس ۽ Ladder Logic
PID افعال کي مختلف طريقن سان ترتيب ڏئي سگھجي ٿو. هيٺ ڏنل تشڪيل ڏيکاري ٿي PID گرمي پد-ڪنٽرول ٿيل اوون سان گرم ڪرڻ واري ڪوئلز سان هلندڙ ريلي جيڪا PWM آئوٽ ذريعي چالو ٿئي ٿي. سابقample پروگرام تمام سادو آهي، ۽ شايد PID افعال جي هر پيچيدگي کي بيان نه ڪري سگھي. Escape پڻ استعمال ڪري سگھي ٿو اينالاگ آئوٽ پُٽ سسٽم کي منظم ڪرڻ لاءِ.
نوٽ: نه ٻه پروگرام ساڳيا آهن. صرف ھدايت جي طور تي ھيٺ ڏنل استعمال ڪريو.
- هن ۾ اڳوڻيample، رننگ جي شروعات ۾ عام طور تي بند ٿيل رابطي کي جاء ڏيو. ان تي ڊبل ڪلڪ ڪريو ۽ ايڊريس تبديل ڪريو %S001 فرسٽ اسڪين لاءِ (FST_SCN).
- پروجيڪٽ ٽول باڪس ۾ اسپيشل آپريشنز کوليو. منتخب ڪريو PID آزاد (جيڪڏهن گھربل PID_ISA پڻ استعمال ڪري سگھجي ٿو) - ڏسو شڪل 4.1.
- PID_IND بلاڪ کي ساڳي رنڊ تي رکو.
- جاءِ عام طور تي کليل ڪوئل جو پتو لڳايو ويو آهي ٽارگيٽ آئوٽ، جيڪو هتي = %Q0001 (ڏسو شڪل 4.2) جيڪڏهن هي آئوٽ اينالاگ آهي، استعمال ڪريو %AQ0001. هن اڳوڻيample هڪ رلي استعمال ڪري رهيو آهي PWM ٻاڦ کي ڪنٽرول ڪرڻ لاء، تنهنڪري %Q0001 استعمال ڪيو ويندو آهي

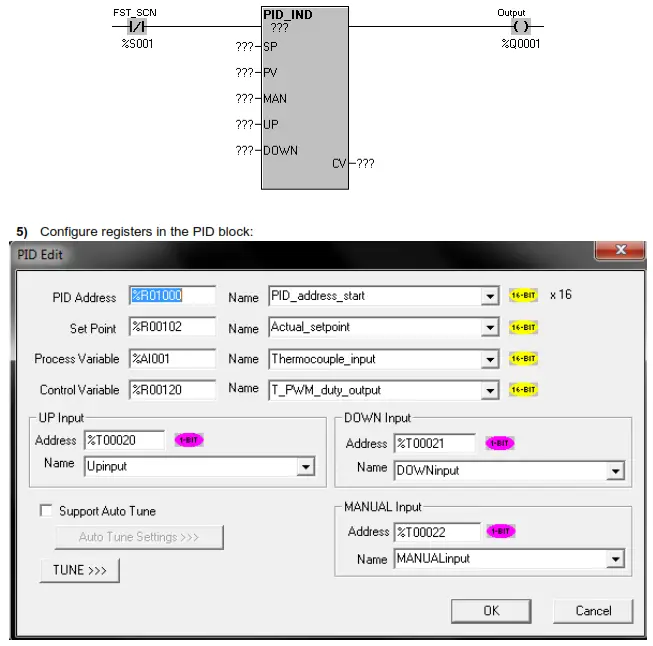
PID پتو: 16 لڳاتار رجسٽرن جو هڪ گروپ جيڪو پي آءِ ڊي جي حسابن ۾ استعمال ٿيڻ لاءِ ٽيون پيرا ميٽرز کي ذخيرو ڪرڻ لاءِ استعمال ڪيو ويندو (مخصوص رجسٽرن تي وڌيڪ تفصيل بعد ۾) سيٽ پوائنٽ: سيٽ پوائنٽ اها قيمت آهي جيڪا PID حاصل ڪرڻ جي ڪوشش ڪري رهي آهي؛ پروسيس ويريبل (PV) جو مقصد حاصل ڪرڻ جو مقصد.
پروسيس متغير: عمل مان موجوده قيمت: قيمت جيڪا PID تبديل ڪرڻ جي ڪوشش ڪري رهي آهي
ڪنٽرول متغير: PID جي پيداوار. اهو قدر جيڪو پروسيس کي ڪنٽرول ڪرڻ لاءِ استعمال ڪيو ويندو پروسيس ويريبل کي سيٽ پوائنٽ ڏانهن آڻڻ لاءِ
دستي ان پٽ: دستي / آٽو بوليان سوئچ. هڪ رجسٽرڊ ايڊريس داخل ڪريو يا نالو رجسٽر چونڊيو جيڪو صارف جي ڪنٽرول ٿيل مينوئل ان پٽ بٽ آهي. هي رجسٽر هڪ Boolean (1-bit) رجسٽر آهي، عام طور تي %T.
UP ان پٽ: دستي موڊ اپ ايڊجسٽمينٽ ان پٽ. هڪ رجسٽرڊ ايڊريس داخل ڪريو يا نالو رجسٽر چونڊيو جيڪو صارف جي ڪنٽرول ٿيل UP ان پٽ بٽ آهي. هي رجسٽر هڪ Boolean (1-bit) رجسٽر آهي، عام طور تي %T.
هيٺيون ان پٽ: مينوئل موڊ ھيٺ ايڊجسٽمينٽ. هڪ رجسٽرڊ ايڊريس داخل ڪريو يا نالو رجسٽر چونڊيو جيڪو صارف جي ڪنٽرول ٿيل DOWN ان پٽ بٽ آهي. هي رجسٽر هڪ Boolean (1-bit) رجسٽر آهي، عام طور تي %T سپورٽ آٽو ٽيون: خودڪار ٽيون کي فعال ڪري ٿو 6) PID بلاڪ لاءِ INT سيٽ پوائنٽ تائين درجا Celcius ان پٽ
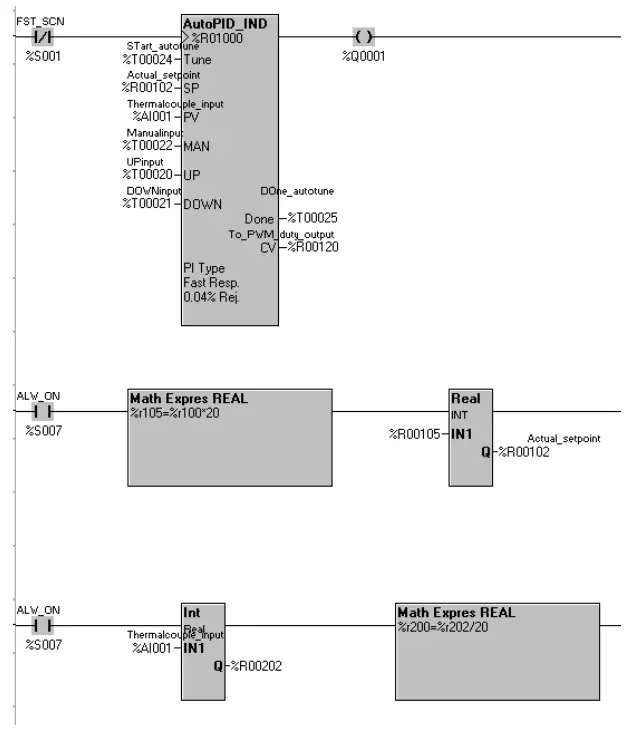
"%R007=%r105*100" جي وضاحت ڪرڻ لاءِ %S20 ALW_ON رابطي سان هڪ رياضي ايڪسپريس ريئل بلاڪ سيٽ ڪريو پوءِ، قدر کي %R00102 ۾ تبديل ڪرڻ لاءِ REAL کان INT بلاڪ ترتيب ڏيو، جيڪو حقيقي_ سيٽ پوائنٽ آهي. (هيٺ ڏسو)
نوٽ: هن ۾ اڳوڻيample، %R00100 هڪ اسڪرين تي قابل تدوين فيلڊ طور سيٽ ڪيو ويو آهي. استعمال ڪندڙ درجا سينٽي گريڊ ۾ گرمي پد مقرر ڪري ٿو، پوء اھو انگ اکر ان انگ کي انٽيجر ۾ تبديل ڪري ٿو جيڪو PID فنڪشن بلاڪ استعمال ڪري ٿو. %R00105 قدر لاءِ جڳهه رکندڙ جي طور تي ڪم ڪري ٿو جيئن اهو تبديليءَ جي ذريعي وڃي ٿو

7) Thermocouple ان پٽ ڊسپلي درجا Celcius ۾
%S007 ALW_ON رابطي سان %AI001 thermocouple_input ويل جي انٽيجر ان پٽ کي حقيقي نمبر ۾ %R202 ۾ تبديل ڪرڻ لاءِ INT کان REAL فنڪشن بلاڪ رکو. ان کان پوء، ڊسپلي اسڪرين (٪ R202) لاء %R200 Thermocouple ان پٽ کي درجا سينٽيڪس ۾ تبديل ڪرڻ لاء رنگ تي رياضي ايڪسپريس ريئل بلاڪ کي ترتيب ڏيو.
نوٽ: هن ۾ اڳوڻيample، %R200 استعمال ڪيو ويندو اسڪرين تي ظاهر ڪرڻ لاءِ اصل درجه حرارت درجا سينٽي گريڊ ۾. جيڪڏھن فارن ھائيٽ کي ترجيح ڏني وڃي، بس رياضي ايڪسپريس ريئل باڪس ۾ مساوات کي تبديل ڪريو مختلف ماپن ۾ تبديل ڪرڻ لاءِ.

8) اسڪرين ٺاھيو جن ۾ پروگرام جي ڪجھ فيلڊز کي ڏيکارڻ يا تبديل ڪرڻ جي ڪارڪردگي آھي، جھڙوڪ مٿي ڏنل %R102 سان سيٽ پوائنٽ کي تبديل ڪرڻ، يا thermocouple کان گرمي پد جي ان پٽ جي گراف جي صورت ۾ درجه حرارت کي ڊسپلي ڪرڻ، جھڙوڪ %R200 مٿي. انهي سان گڏ، اسڪرين تي سلائڊ بار يا قابل تدوين فيلڊ ٺاهي سگھجن ٿيون ته جيئن ترتيب جي مقصدن لاءِ PID اصطلاحن کي دستي طور تي تبديل ڪرڻ آسان ۽ تيز ٿئي.
هيٺ ڏنل ڪوڊ ڏيکاري ٿو سڀني پوئين قدمن سان مڪمل ٿيل آٽو-ٽيون سان PID بلاڪ تي سيٽ اپ:
4.3 PWM موڊ
ڪنهن به ايپليڪيشن لاءِ جنهن کي ڊجيٽل آئوٽ جي ضرورت هجي (هڪ هيٽر جيڪو يا ته رلي يا ڊجيٽل آئوٽ ذريعي ڪنٽرول ٿئي) PWM موڊ هڪ آپشن آهي. هي طاقت مختلف ڪندو جيڪو بلاڪ ذريعي گذري ٿو PWM سگنل جي طور تي. انهي طريقي سان هڪ آئوٽ کي ڪنٽرول ڪرڻ لاء هڪ ڪنڊ PID بلاڪ جي ٻئي پاسي هجڻ گهرجي.
PWM موڊ لاء، اعلي clamp ۽ گھٽ ڪلamp لازمي طور تي 32000 ۽ -32000 تي رکيل هجي. -32000 هڪ ڊيوٽي چڪر آهي 0٪ ۽ 32000 هڪ ڊيوٽي چڪر آهي 100٪،
PWM چڪر جو وقت: PID چڪر جو وقت اهو طئي ڪري ٿو ته PID ڪيترو وقت بند ۽ بند ٿيندو. اهو چڪر واري وقت دوران هڪ ڀيرو تائين تبديل ٿيندو. جيڪڏهن چڪر جو وقت 0 تي رهجي وڃي ته PID بلاڪ پاور پاس ڪندو جڏهن به CV ويليو مثبت آهي، ۽ پاور پاس نه ڪندو جڏهن CV ويلو منفي هجي، ڪڏهن ڪڏهن اهو آپريشن جو مطلوب طريقو هوندو آهي.
آپريشن لاءِ صحيح چڪر واري وقت کي چونڊڻ تمام ضروري ٿي سگهي ٿو ڇاڪاڻ ته اهو سڌو سنئون اثر انداز ڪندو ته توهان جي پيداوار ڪيترا ڀيرا بند ٿيندي آن کان آف تي. جيڪڏهن توهان وٽ ڪو جسماني لباس آهي جنهن جي ڪري آئوٽ پٽ کي آن کان آف ڪرڻ جي ڪري (جهڙوڪ رلي ۾) اهو مدد ڪندو ته اهو ڪيترو وقت تبديل ٿئي ٿو.
4.4 سيٽ پوائنٽس
جڏهن PID بلاڪ استعمال ڪندي، سڀئي ٽيوننگ پيٽرولر ڪمانڊ بلاڪ ۾ محفوظ ٿيل آهن. جيڪڏهن %R رجسٽر استعمال ڪيا وڃن ٿا، ته هي ڊيٽا برقرار آهي، مطلب ته اهو هڪ پاور چڪر کان پوءِ رجسٽر ۾ رهندو.
جيڪڏهن PID پروگرام کي ڪنهن ٻئي ڪنٽرولر ۾ رکڻو پوندو، PID افعال سان لاڳاپيل رجسٽرز کي آباد ڪريو. اهو ٿي سگهي ٿو حرڪت واري افعال ذريعي يا سيٽ پوائنٽن ذريعي.
جڏهن استعمال ڪريو فعل افعال، معلومات جي حوالي سان هر رجسٽري ڇا ڪندو آهي PID ڪنٽرول بلاڪ ۾ موجود آهي. PID ٽيوننگ مينيو ۾ سيٽ پوائنٽون محفوظ ڪريو بٽڻ کي استعمال ڪندي سيٽ پوائنٽ حاصل ڪري سگھجن ٿا.
جڏهن سيٽ پوائنٽون استعمال ڪندي، اهو ضروري آهي ته پڪ ڪرڻ لاء سيٽ پوائنٽون PID جي قيمتن کي آباد ڪن. ائين ڪرڻ لاء، CsCape سيٽ پوائنٽس کي ڪنٽرولر ۾ ڊائون لوڊ ڪرڻ لاء سيٽ ڪري سگھجي ٿو.
ڏانهن وڃو پروگرام → ڊائون لوڊ جا اختيار ۽ پڪ ڪريو ته چيڪ بڪس جيڪو چوي ٿو سيٽ پوائنٽ ٽيبل چيڪ ڪيو ويو آهي.
4.5 رجسٽر
ٻئي PID عنصرن جي ضرورت آھي سورھن (16) WORD (16-bit) رجسٽرن جي. اهي عام طور تي قسم جا هوندا %R. اهو حوالو صف سڏيو ويندو آهي.
هر PID عنصر کي لازمي طور تي الڳ الڳ ريفرنس ايري استعمال ڪرڻ گهرجي، جيتوڻيڪ قيمتون موجوده PID عنصر سان هڪجهڙائي رکن ٿيون. PID عناصر جي اوورليپنگ نه ٿي سگھي.
PID عنصر استعمال ٿيڻ کان اڳ آفسيٽ 0 کان 9 تائين رجسٽر ٿيڻ گھرجي.
| رجسٽر آفسيٽ | پيرا ميٽر | يونٽس | حد | وصف |
| 0 | Sampمدت | 10 ايم ايس | 0 کان 65535 تائين | PID حلن جي وچ ۾ اجازت ڏنل 10 mS واڌ ۾ ننڍو وقت |
|
1 |
مردار بينڊ + |
PV شمار |
0 کان 32000 تائين |
PV ڳڻپ جي لحاظ کان اپر ۽ لوئر ڊيڊ بينڊ جي حدن کي بيان ڪري ٿو. ٻنهي کي 0 تي مقرر ڪيو وڃي جيستائين PID ٽيون ڪيو وڃي. A Dead Band پوءِ ضروري ٿي سگھي ٿو CV قدرن ۾ ننڍين تبديلين کي روڪڻ لاءِ غلطي ۾ معمولي تبديلين جي ڪري. |
|
2 |
مردار بينڊ - |
PV شمار |
0 کان -3200 |
|
| 3 | تناسب حاصل ڪرڻ (KP) سيڪڙو | سيڪڙو | 0 کان 327.67٪ | فيصد جي لحاظ کان تناسب حاصل ڪرڻ وارو عنصر مقرر ڪري ٿو. 100 سيٽ اتحاد جو فائدو (1 جو فائدو). |
| 4 | مشتق حاصل (Kd) | 10 ايم ايس | 0 کان 327.67 تائين
سيڪنڊ |
10 ايم ايس جي قرارداد سان گڏ وقت جي طور تي داخل ٿيو. PID مساوات ۾، اهو اثر آهي. |
|
5 |
انٽيگرل ريٽ (KI) |
ورجائي ٿو في 1000 سيڪنڊ | 0 کان 32.76 تائين
في سيڪنڊ ورجائي ٿو |
في سيڪنڊ جي ورجائي جي تعداد جي طور تي داخل ٿيو. انضمام جي شرح. |
| 6 | CV تعصب | CV شمار | -32000 کان
+32000 |
CV ڳڻپ جو تعداد ريٽ کان اڳ آئوٽ پٽ ۾ شامل ڪيو ويو ۽ amplitude clamps. |
| 7 | CV اپر ڪلamp | CV شمار | -32000 کان
+32000 |
CV ڳڻپ جو تعداد CV لاءِ سڀ کان وڌيڪ ۽ گھٽ قيمت جي نمائندگي ڪري ٿو. CV اپر ڪلamp CV لوئر Cl کان وڌيڪ مثبت هجڻ گهرجيamp. |
| 8 | سي وي لوئر ڪلamp | CV شمار | -32000 کان
+32000 |
|
|
9 |
گھٽ ۾ گھٽ وقت |
مڪمل سفر جا سيڪنڊ |
0 کان 32000 تائين
32000 منتقل ڪرڻ لاء سيڪنڊ CV شمار |
اهو طئي ڪري ٿو ته سي وي جي قيمت ڪيتري تيزيءَ سان تبديل ٿي سگهي ٿي. |
| 10 | ترتيب لفظ | N/A | N/A | اندروني استعمال - ھن قدر کي تبديل نه ڪريو |
|
11 |
دستي حڪم |
CV شمار |
آٽو موڊ ۾ آٽو ٽريڪ؛ دستي موڊ ۾ سي وي سيٽ ڪري ٿو | خودڪار موڊ ۾ هي رجسٽر CV جي قيمت کي ٽريڪ ڪري ٿو. دستي موڊ ۾، هن رجسٽر ۾ اها قيمت شامل آهي جيڪا CV جي اندر cl جي اندر نڪرندي آهيamp ۽ حد بنديون. |
| 12 | اندروني ايس پي | OCS پاران استعمال ٿيل | N/A | ايس پي کي ٽريڪ ڪري ٿو |
| 13 | اندروني PV | OCS پاران استعمال ٿيل | N/A | ٽريڪ پي وي ۾ |
| 14 | اندروني CV | OCS پاران استعمال ٿيل | N/A | سي وي کي ٽريڪ ڪري ٿو |
| 15 | سائيڪل جو وقت | سيڪنڊ | N/A | PWM لاء سائيڪل جو وقت سيڪنڊن ۾ |
ٽيوننگ
5.1 ٽيون پيٽرولر
اهو ڄاڻڻ ضروري آهي ته PID بلاڪ جي ڪم ۾ ڪئين پيٽرولر. هيٺ ڏنل، هر قيمت لاء وصفون درج ٿيل آهن:
| پيرا ميٽر | وصف |
| Sampمدت: | PID جي حسابن جي وچ ۾ اجازت ڏنل وقت، اهو آهي ته ڪنٽرولر هڪ نئين سي وي جي قيمت کي ڪيترو وقت حساب ڪندو. |
| مردار بينڊ +/- | ڊيڊ بينڊ استعمال ڪيو ويندو آهي ننڍين تبديلين کي روڪڻ لاءِ Control Variable Values جيڪا ٿي سگهي ٿي ٿي سگھي ٿي ننڍين تبديلين جي ڪري عمل جي تبديليءَ ۾ جيئن اهو سيٽ پوائنٽ تائين پهچي ٿو. هي سيٽ پوائنٽ جي چوڌاري قدرن جي هڪ حد ٺاهي ٿو، جيڪڏهن پروسيس متغير هن حد جي اندر آهي، پوء ڪنٽرول متغير تبديل نه ٿيندو. |
| تناسب حاصل ڪرڻ (Kp): | هي حاصل قدر آهي جيڪو سڌو سنئون موجوده غلطي جي قيمت سان لاڳاپيل آهي، هي آهي KP PID مساوات کان. |
| مشتق حاصل (Kd): | اڪثر ايپليڪيشنن لاءِ Derivative Gain غير ضروري آهي. هي حاصل قدر 10mS جي قرارداد سان داخل ڪيو ويو آهي، هي قدر استعمال ڪيو ويندو آهي ڪنٽرول متغير کي عمل ۾ اوچتو تبديلين جو جواب ڏيڻ لاءِ |
| Integral Gain (Ki): | انٽيگرل حاصل استعمال ڪيو ويندو آهي پروسيس جي اوسط قدر کي آڻڻ لاءِ متغير وقت جي مقرر پوائنٽ جي برابر. اهو هن کي استعمال ڪندي هڪ مڪمل غلطي کي ڳولڻ لاءِ انٽيگرل استعمال ڪندي هڪ ڏنل عرصي دوران مڪمل ڪندو ۽ ڪنٽرول متغير کي ترتيب ڏيڻ. جيڪڏهن پروسيس متغير ڊگهي عرصي تائين سيٽ پوائنٽ کان پري آهي، اهو تعصب پيدا ڪري سگهي ٿو. هڪ دفعو اهو تعمير ڪيو ويو آهي اهو تبديل ٿيڻ ۾ ڪجهه وقت وٺي سگھي ٿو، اهو عمل ۾ ڏسڻ لاء ڪجهه آهي جيڪو هڪ سيٽ پوائنٽ تي ڊگهو وقت رهي سگهي ٿو ۽ پوء ٻئي ۾ وڏي تبديلي آڻي. |
| CV تعصب: | هي هڪ قدر آهي جيڪو ڪنٽرول متغير ۾ شامل ڪيو ويو آهي حساب وٺڻ کان پوء. ڪنٽرول متغير کي ڳڻيو ويندو، تعصب شامل ڪيو ويندو، ۽ پوء ڪو به ٻلو يا amplitude حدون اثر انداز ٿينديون. |
| CV اپر ۽ لوئر clamp: | ڪنٽرول متغير مٿين cl کان وڌيڪ نه ٿي سگھيamp ۽ اهو هيٺين cl کان گهٽ نه ٿي سگهيamp. اهو يقيني بڻائيندو ته توهان جو ڪنٽرول متغير هڪ مقرر ڪيل حد اندر رهي ٿو. |
| گھٽ ۾ گھٽ وقت: | اهو محدود ڪندو ته ڪنٽرول متغير ڪيترو تيزيء سان تبديل ٿيندو. يونٽن جو تعداد سيڪنڊن جو آھي جيڪو 0 کان 32000 تائين ھلڻ ۾ وٺندو آھي، تنھنڪري 64 جي گھٽ شرح کي ڪنٽرول متغير تبديل ڪرڻ جي اجازت ڏيندو 500 ڳڻپ في سيڪنڊ کان وڌيڪ. |
| سائيڪل جو وقت (صرف PWM موڊ): | هي سيڪنڊن ۾ PWM آئوٽ پُٽ جي ڪارڪردگيءَ لاءِ ڊيوٽي چڪر آهي، اهو استعمال ڪري سگهجي ٿو ان کي محدود ڪرڻ لاءِ ته ڪيترو بار آئوٽ پُٽ آن کان آف تي سوئچ ڪندو. جيڪڏهن اهو 0 تي رهجي ويو، بلاڪ پاور پاس ڪندو جيڪڏهن CV 0 يا ان کان وڌيڪ آهي، ۽ جيڪڏهن CV 0 کان گهٽ آهي ته پاور پاس نه ڪندو. |
5.2 دستي ٽيوننگ
دستي ٽيوننگ KP
ڪيترن ئي ايپليڪيشنن لاءِ هڪ تڪڙي مينوئل ٽيوننگ تمام ضروري آهي، اڪثر ايپليڪيشنون استعمال ڪنديون KP ويليو ۽ هڪ ننڍي KI قدر. جڏهن شروعاتي قيمتن کي ترتيب ڏيو، اهو مددگار ثابت ٿي سگهي ٿو view PID رياضي جي لحاظ کان. مثالample: درجه حرارت ڪنٽرول ايپليڪيشن لاءِ، اهو فيصلو ڪرڻ لاءِ ته ڪي پي جي قيمت ڪٿي شروع ٿيڻ گهرجي ان جي لحاظ کان
گرمي پد:
- مثال طورample، ٻاھر نڪرڻ لاءِ وڌ ۾ وڌ (32,000) جڏھن منھنجو گرمي پد سيٽ پوائنٽ کان گھٽ ۾ گھٽ 20 ° ھيٺ آھي
- هڪ اينالاگ ان پٽ مان 20° کي خام ڳڻپ ۾ تبديل ڪريو، جيڪڏهن ان پٽ جي ريزوليوشن 0.05° آهي ته پوءِ اهو 400 جي خام ڳڻپ ڏئي ٿو
- صرف مسلسل حاصل ڪرڻ سان برابري آهي CVOUT = KP*Error، ڇاڪاڻ ته CVOUT ۽ غلطي سڃاتل آهن، برابري ڀريو 32000 = KP*400 32000/400 = KP KP = 80
- ھاڻي اسان وٽ ھڪڙو شروعاتي نقطو آھي KP لاء، اھو ضروري آھي ته ان کي اصل ايپليڪيشن ۾ آزمايو وڃي
دستي ٽيوننگ KI
ايپليڪيشنن جي اڪثريت لاء، KI قيمت تمام وڏي هجڻ جي ضرورت ناهي. اتي ڪيتريون ئي شيون آھن جن تي غور ڪيو وڃي جڏھن اھو طئي ڪيو وڃي ته ڪھڙي قسم جي KI قدر توھان جي درخواست کي ھجڻ گھرجي.
انٽيگرل ويليو ڪم ڪرڻ جو طريقو اهو آهي ته اهو وقت جي هڪ عرصي دوران غلطي جو انضمام وٺندو آهي ۽ ان کي ”پوشيده“ CV تعصب ۾ شامل ڪري ٿو. اهو وڌندو يا گهٽائيندو جيستائين توهان جي PV اوسط توهان جي سيٽ پوائنٽ ٿيڻ کان ٻاهر آهي.
جيڪڏهن عمل سست آهي، هن "پوشیدہ" تعصب ۾ وڏي قيمت لاء ڏسو. جيڪڏهن سيٽ پوائنٽ ۾ ڪا تبديلي آهي، اها قيمت تمام جلدي تبديل نه ٿي سگهي ٿي ۽ توهان جي سسٽم جي جوابي وقت کي تمام گهڻو سست ڪري سگهي ٿو.
رياضي:
Integral_Bias = Integral_Bias + Ki*.001 (dt، وقت گذري ويو آخري ماپ کان سيڪنڊن ۾) * غلطي
سادگي لاءِ، هڪ سيڪنڊ کان وڌيڪ واڌ کي ڏسو ۽ فرض ڪريو ته سيڪنڊ جي مدي لاءِ پروسيس متغير اڻڄاتل رهي ٿو.
Example(s): سيٽ پوائنٽ = 1000، پروسيس متغير = 800
| Ki | تبديل ڪريو ڪنٽرول variable في سيڪنڊ ۾ |
| 100 | 20 |
| 250 | 50 |
| 600 | 120 |
| 1000 | 200 |
لازمي طور تي وڏو خطرو اهو آهي ته اهو هميشه سرگرم آهي. جيڪڏهن ڪو عمل 5000 جي سيٽ پوائنٽ سان شروع ٿئي ٿو، پروسيس ويريبل 2000 کان شروع ٿئي ٿو، ۽ پروسيس ويريبل کي سيٽ پوائنٽ تائين پهچڻ ۾ 3 منٽ لڳن ٿا، ان وقت ۾ 100 جي Ki قدر سان ان وقت ۾ Bias هڪ قدر تي هوندو. 27000 جي حساب سان. اهو ممڪن طور تي عمل جي متغير لاءِ هڪ اهم اوور شوٽ جو سبب بڻجندو.
5.3 پي آءِ ڊي بلاڪ کي خودڪار ڪرڻ
| PID آٽو ٽيون لاءِ سيٽنگون | |
| آٽو ٽيون ايڊريس شروع ڪريو | ھڪڙو 1-bit پتو جيڪو خودڪار ٽيون عمل دوران اعلي مقرر ڪيو ويندو |
| آٽو ٽيون ڊن ايڊريس | هڪ 1-bit ايڊريس جيڪو خودڪار ٽيون عمل مڪمل ٿيڻ کان پوء اعلي مقرر ڪيو ويندو |
| خودڪار ٽيون قسم | ٽيوننگ جو قسم چونڊڻ لاءِ هڪ ڊراپ-ڊائون مينيو جيڪو ڪيو ويندو. ٽي اکر ھر ھڪڙي ھڪڙي قسم جي حاصلات لاءِ بيٺا آھن متناسب، انٽيگرل، نڪتل. سڀ ٽي چونڊجي سگھجن ٿا، متناسب ۽ انٽيگرل، يا صرف متناسب. (پي آءِ ڊي, PI، يا P ترتيب سان) |
| شور فلٽرنگ | شور فلٽرنگ اهو طئي ڪري ٿو ته سيٽ پوائنٽ کان ڪيترو مٿي ۽ هيٺ آٽو ٽيون عمل کي ان جي ماپ حاصل ڪرڻ لاءِ وڃڻ گهرجي. هي ماپ ۾ شور کي سگنل ڏيڻ کان روڪيندو ته آٽو ٽيون اڳ ۾ ئي گهربل سيٽ پوائنٽ تي پهچي چڪو آهي. سيڪڙوtage پوري پيماني تي ٻڌل آھي (32000 ڳڻپ) ۽ حدون 0.04٪ (~ 13 شمار) کان٪ 5 (1600 شمار) |
| ڪنٽرولر جواب | جواب جي "رفتار" جو تعين ڪري ٿو جيڪو خودڪار طريقي سان ٺهيل آهي. تڪڙو ڪجهه اوور شوٽ پيدا ڪندو پر تيزيءَ سان سيٽ پوائنٽ تي پهچندو، وچولي ٿورڙو اوور شوٽ پيدا ڪندو ۽ سيٽ پوائنٽ تي ٿوري دير سان پهچندو، سست ڪوبه اوور شوٽ پيدا نه ڪندو، تمام سست ھڪڙي پروسيس لاءِ چونڊڻ جي ضرورت ٿي سگھي ٿي جيڪا ”زيگلر-نيڪولس ضابطن لاءِ بھترين حد کان ٻاھر آھي“ - تمام حساس نظام |
| ٽيون 2/3 سيٽ پوائنٽ تي | آٽو ٽيوننگ جي تجربي کي اجازت ڏئي ٿي ته 2/3 سيٽ پوائنٽ جي بنياد تي ان پٽ کي تبديل ڪري. هي اختيار استعمال ڪريو جڏهن اهو نه هجي ته عمل جي لاءِ نه هجي ته سيٽ پوائنٽ کان مٿي سفر ڪرڻ لاءِ آٽو ٽيوننگ تجربي دوران. |
آٽو ٽيوننگ کان اڳ پڪ ڪريو ته PID بلاڪ ۾ ھيٺيون قدرون سيٽ اپ ڪريو:
- مقرر پوائنٽ
- Sampمدت
- اپر ۽ لوئر Clamp
- غلطي جي مدت،
- آئوٽ پولارٽي
هڪ دفعو سڀئي سيٽنگون پنهنجي جاءِ تي آهن، سيٽ ڪريو Start Auto-Tune bit High (يا ته ڊيٽا واچ ۾ يا ڪوڊ ۾) سسٽم ڪنٽرول ڪندو ۽ پروسيس ويريئبل کي سيٽ پوائنٽ جي مٿان ۽ هيٺ وڃڻ جو سبب بڻائيندو، ان کان پوءِ ڪيترائي ڀيرا. سڀ ماپون ورتيون وڃن جن کي ان جي ضرورت آهي AutoTune_Done بٽ وڌي ويندو ۽ PID بلاڪ واپس پنهنجي آخري حالت ۾ ويندو “بهتر” متناسب، نڪتل، ۽ انٽيگرل قدرن سان. CsCape ۾ PID بلاڪ کي کوليو قدرن کي ڏسڻ لاءِ، يا ته انھن کي نئين سيٽ پوائنٽن طور محفوظ ڪريو يا انھن کي مستقبل جي استعمال لاءِ نوٽ ڪريو.
ٽيڪنيڪل سپورٽ
اتر آمريڪا
ٽيليفون: 317-916-4274
فيڪس: 317-639-4279
http://www.heapg.com
اي ميل: techsppt@heapg.com
يورپ
ٽيليفون: +353-21-4321266
فيڪس: +353-21-4321826
http://www.horner-apg.com
اي ميل: tech.support@horner-apg.com
دستاويز / وسيلا
 |
HORNER Cscape PID سسٽم ۽ ڪنٽرولرز [pdf] استعمال ڪندڙ ھدايت Cscape PID سسٽم ۽ ڪنٽرولرز |



