![]()
MAN1014-01-EN
មគ្គុទ្ទេសក៍ចាប់ផ្តើមរហ័ស
មគ្គុទ្ទេសក៍ចាប់ផ្តើមរហ័ស Cscape PID
ការណែនាំអំពីការកំណត់រចនាសម្ព័ន្ធ PID និងការលៃតម្រូវការចាប់ផ្តើមរហ័ស
PREFACE
មគ្គុទ្ទេសក៍ខាងក្រោមដើរតួជាការណែនាំសម្រាប់អ្នកប្រើប្រាស់ប្រព័ន្ធ និងឧបករណ៍បញ្ជា PID (សមាមាត្រអាំងតេក្រាលអាំងតេក្រាល) និងរបៀបរៀបចំ និងកំណត់រចនាសម្ព័ន្ធរង្វិលជុំ PID នៅក្នុង Cscape ជាមួយ Horner OCS ព័ត៌មាននៅក្នុងការណែនាំនេះដើរតួជាព័ត៌មានបន្ថែមចំពោះផ្នែកជំនួយ Cscape ដែលគ្របដណ្តប់ PIDs ។ លទ្ធផល PID អាចត្រូវបានប្រើនៅក្នុងកម្មវិធីផ្សេងៗគ្នា ហើយប្រព័ន្ធទាំងអស់គឺខុសគ្នា ដូច្នេះព័ត៌មានដែលមាននៅក្នុងការណែនាំខាងក្រោមនឹងដើរតួជាការដំឡើងជាមូលដ្ឋានតែប៉ុណ្ណោះ។
មគ្គុទ្ទេសក៍ត្រូវបានសរសេរដើម្បីចាប់ផ្តើមជាមួយនឹងគោលការណ៍ស្នូលនៃឧបករណ៍បញ្ជា PID សម្រាប់អ្នកដែលប្រហែលជាមិនមានជំនាញក្នុងដំណើរការនោះទេ បន្ទាប់មកបង្កើតការអនុវត្តន៍ និងការកែសម្រួលប្រព័ន្ធ PID នៅក្នុង Cscape ។
ប្រធានបទខាងក្រោមនឹងត្រូវបានគ្របដណ្តប់៖
- ការណែនាំអំពី PID
- មូលដ្ឋានគ្រឹះ PID
- ការកំណត់រចនាសម្ព័ន្ធ Horner OCS Cscape
- ការលៃតម្រូវ
ចំណាំ៖ មិនមែនរាល់ភាពស្មុគ្រស្មាញនៃ PIDs នឹងត្រូវបានពន្យល់នៅទីនេះទេ ប៉ុន្តែព័ត៌មានគ្រប់គ្រាន់ដើម្បីអាចគ្រប់គ្រងរង្វិលជុំជាមូលដ្ឋានដោយប្រើ Cscape ។
សម្រាប់វីដេអូនៅលើ PID របស់យើង។ Webinar ចុចទីនេះ
ការណែនាំ
មុខងារ PID គឺជាលទ្ធផលដែលផ្លាស់ប្តូរ ឬគ្រប់គ្រងទ្រព្យសម្បត្តិរូបវន្តនៅក្នុងប្រព័ន្ធ។ សម្រាប់អ្នកប្រើប្រាស់ថ្មី ការលៃតម្រូវប្រព័ន្ធ PID អាចបណ្តាលឱ្យមានការភ័ន្តច្រឡំ និងការខកចិត្ត។ ឧamples នៃមុខងារ PID អាចត្រូវបានគេមើលឃើញនៅក្នុងប្រព័ន្ធដែលត្រួតពិនិត្យ និងផ្លាស់ប្តូរសម្ពាធ សីតុណ្ហភាព ល្បឿន កម្រិតសំឡេង។ ទែម៉ូស្ដាត HVAC គ្រួសារត្រូវបានកំណត់ទៅសីតុណ្ហភាពឋិតិវន្តជាក់លាក់ ដែលជាចំណុចកំណត់នៅក្នុងប្រព័ន្ធ PID ។ ឯកតាវាស់សីតុណ្ហភាពព័ទ្ធជុំវិញនៃផ្ទះនៅគ្រប់ពេលវេលា បង្កើតដំណើរការ Variable ដែលស្ថិតក្នុងស្ថានភាពប្រែប្រួល។ ភាពខុសគ្នារវាង Setpoint និង Process Variable ត្រូវបានគេហៅថា Error ដែលប្រព័ន្ធ PID ប្រើដើម្បីគណនា Output ត្រលប់ទៅ thermostat ដើម្បីរក្សាសីតុណ្ហភាពនៅចំណុចដែលបានកំណត់។ ដំណើរការនេះជាធម្មតាស្ថិតក្នុងស្ថានភាពបន្តបន្ទាប់គ្នា រង្វិលជុំបិទដែលនឹងរក្សាសីតុណ្ហភាពជាប់លាប់ (ប្រហែលជាមិនមានប្រសិទ្ធភាពថាមពលសម្រាប់ HVAC ដើម្បីប្រើរង្វិលជុំ PID)។ ខាងក្រោមនេះជាការបង្ហាញអំពីប្រព័ន្ធ PID មូលដ្ឋាន៖
 គ្មានផ្នែកណាមួយនៃការបោះពុម្ពនេះអាចត្រូវបានផលិតឡើងវិញដោយគ្មានកិច្ចព្រមព្រៀងជាមុន និងការអនុញ្ញាតជាលាយលក្ខណ៍អក្សរពី Horner APG, LLC ។ ព័ត៌មាននៅក្នុងឯកសារនេះគឺអាចផ្លាស់ប្តូរដោយគ្មានការជូនដំណឹងជាមុន។
គ្មានផ្នែកណាមួយនៃការបោះពុម្ពនេះអាចត្រូវបានផលិតឡើងវិញដោយគ្មានកិច្ចព្រមព្រៀងជាមុន និងការអនុញ្ញាតជាលាយលក្ខណ៍អក្សរពី Horner APG, LLC ។ ព័ត៌មាននៅក្នុងឯកសារនេះគឺអាចផ្លាស់ប្តូរដោយគ្មានការជូនដំណឹងជាមុន។
លក្ខខណ្ឌ PID
តម្លៃសមាមាត្រ - "KP"
តម្លៃសមាមាត្រ (KP) (ជួនកាលគេហៅថា Gain) ផ្លាស់ប្តូរទិន្នផលតាមសមាមាត្រទៅនឹងតម្លៃកំហុសបច្ចុប្បន្ន។ តម្លៃសមាមាត្រផ្លាស់ប្តូរទិន្នផលនៅក្នុងប្រព័ន្ធ PID ច្រើនបំផុត ហើយវាគួរតែជាចំណុចចាប់ផ្តើមក្នុងអំឡុងពេលដំណើរការលៃតម្រូវ (ដែលនឹងត្រូវបានពន្យល់លម្អិតបន្ថែមទៀតនៅពេលក្រោយ)។ ទោះយ៉ាងណាក៏ដោយ ប្រសិនបើការផ្លាស់ប្តូរតម្លៃសមាមាត្រខ្ពស់ពេក វាអាចបណ្តាលឱ្យប្រព័ន្ធមិនស្ថិតស្ថេរ។ ការទទួលបានសមាមាត្រតូចបណ្តាលឱ្យមានការផ្លាស់ប្តូរទិន្នផលតិចតួចបំផុត ដែលអាចតូចពេកសម្រាប់កំហុសបញ្ចូលធំ ដែលបណ្តាលឱ្យឧបករណ៍បញ្ជាមិនសូវឆ្លើយតប (រសើប)។
ការគ្រប់គ្រងតែសមាមាត្រនឹងមិនទូទាត់តាមតម្លៃគោលដៅទេ ប៉ុន្តែនឹងរក្សានូវកំហុសក្នុងស្ថានភាពស្ថិរភាព ដែលជាមុខងារនៃការកើនឡើងសមាមាត្រ និងការកើនឡើងនៃដំណើរការ។
ការកើនឡើងសមាមាត្រខ្ពស់ជាង ការផ្លាស់ប្តូរទិន្នផលកាន់តែធំ។
តម្លៃអាំងតេក្រាល – “KI”
តម្លៃអាំងតេក្រាល (KI) មើលទៅលើការប្រមូលផ្តុំនៃកំហុសពីមុន ដើម្បីគណនាការផ្លាស់ប្តូរតម្លៃបន្ទាប់សម្រាប់ក្បួនដោះស្រាយ ដូច្នេះអាចត្រូវបានបង្ហាញជាការផ្លាស់ប្តូរតម្លៃក្នុងរយៈពេលដែលបានផ្តល់ឱ្យ។ តម្លៃអាំងតេក្រាលបង្កើនល្បឿនចលនានៃដំណើរការឆ្ពោះទៅរកចំណុចដែលបានកំណត់ និងលុបបំបាត់កំហុសនៃស្ថានភាពស្ថិរភាពដែលនៅសេសសល់ដែលកើតឡើងជាមួយនឹងការគ្រប់គ្រងតាមសមាមាត្រប៉ុណ្ណោះ។ ដំណើរការនេះមានគោលបំណងកាត់បន្ថយកំហុសក្នុងស្ថានភាពស្ថិរភាពទៅសូន្យ បង្កើតប្រព័ន្ធ PID ដែលមានស្ថេរភាព និងមានប្រសិទ្ធភាព។
ឧបករណ៍បញ្ជា PI គឺជាប្រភេទវត្ថុបញ្ជាដែលពេញនិយមបំផុត ព្រោះជាធម្មតាពួកគេអាចរក្សាលំនឹងនៅចំណុចដែលបានកំណត់ដោយមិនចាំបាច់ប្រើពាក្យដេរីវេ។ ទោះយ៉ាងណាក៏ដោយ ពេលខ្លះតម្លៃដេរីវេគឺត្រូវការជាចាំបាច់ដើម្បីធ្វើស្ថេរភាពរង្វិលជុំ PID ឬបង្កើនការឆ្លើយតប។ តម្លៃ "ម្តងទៀត/វិនាទី" នៃពាក្យអាំងតេក្រាលកាន់តែខ្ពស់ ការផ្លាស់ប្តូរលទ្ធផលកាន់តែធំ។ ប្រយ័ត្នជ្រុលហួសហេតុ។
តម្លៃដេរីវេ – “Kd”
តម្លៃដេរីវេ (Kd) គឺសមាមាត្រទៅនឹងអត្រានៃការផ្លាស់ប្តូរនៃអថេរដំណើរការ។ ពាក្យនិស្សន្ទវត្ថុប៉ាន់ស្មានអត្រានៃការផ្លាស់ប្តូរបច្ចុប្បន្នទៅអនាគតដោយចំនួនកំណត់នៃវិនាទី ដោយរំពឹងថានឹងមានការផ្លាស់ប្តូរចំពោះកំហុស។ ការបន្ថែមពាក្យ Derivative ទៅរង្វិលជុំ PI អាចនាំឱ្យរង្វិលជុំឆ្លើយតបកាន់តែច្រើន ឬលឿនជាងមុន ព្រោះវាអនុញ្ញាតឱ្យទទួលបាន P និង I ធំជាង។ តម្លៃដេរីវេត្រូវបានព្យាករជាវិនាទី មានន័យថាចំនួនវិនាទីដែលតម្លៃនឹងព្យាករណ៍ទៅអនាគតដើម្បីប្រមើលមើលអត្រានៃការផ្លាស់ប្តូរ។
ទោះយ៉ាងណាក៏ដោយ ប្រសិនបើមានសំឡេងរំខានប្រព័ន្ធនៅក្នុងរង្វិលជុំ PID ឬលំយោល ពាក្យ D អាចបង្កើនតម្លៃផ្សេងទៀត និងបណ្តាលឱ្យរង្វិលជុំនៃក្បួនដោះស្រាយ PID បាត់បង់ការគ្រប់គ្រង ដែលមានប្រសិទ្ធភាពធ្វើឱ្យរង្វិលជុំមិនគួរឱ្យទុកចិត្ត។
តម្លៃដេរីវេអាចនាំឱ្យការឆ្លើយតបរង្វិលជុំលឿនជាងមុន ប៉ុន្តែត្រូវប្រយ័ត្នចំពោះសំឡេងរំខាននៃប្រព័ន្ធ។ ចាប់ផ្តើមដោយគ្មាន ហើយបន្ថែមប្រសិនបើចាំបាច់។
ដាក់វាទាំងអស់គ្នា
ខាងក្រោមនេះគឺជាតារាងមូលដ្ឋានដែលពន្យល់ពីរបៀបដែល PID ដំណើរការជាទូទៅនៅពេលកើនឡើង ដែលនឹងជួយក្នុងផ្នែក "ការកំណត់" និង "ការលៃតម្រូវ" ខាងក្រោម៖
ចំណាំ៖ ប្រព័ន្ធនីមួយៗមានតែមួយ ដូច្នេះតារាងខាងក្រោមពន្យល់តែទំនាក់ទំនងទូទៅប៉ុណ្ណោះ។
| តម្លៃ | ពេលវេលាកើនឡើង | SetPoint Overshoot | ពេលវេលាកំណត់ | កំហុសក្នុងស្ថានភាពស្ថិរភាព |
| សមាមាត្រ | ថយចុះ | កើនឡើង | – | ថយចុះ |
| អាំងតេក្រាល។ | ថយចុះ | កើនឡើង | កើនឡើង | រលាយបាត់ |
| ដេរីវេ | – | ថយចុះ | ថយចុះ | – |
គេចចេញពីការកំណត់រចនាសម្ព័ន្ធ
4.1 ការជ្រើសរើសប្លុកមុខងារ PID
មានមុខងារប្លុក PID ពីរផ្សេងគ្នានៅក្នុង Cscape: Independent និង ISA ។ ប្លុក PID ទាំងពីរប្រើចំណុចកំណត់ និងដំណើរការអថេរដើម្បីផ្លាស់ប្តូរអថេរគ្រប់គ្រងដោយប្រើក្បួនដោះស្រាយសំណុំ។ ប្លុក PID ទាំងពីរនឹងទាញយកដំណោះស្រាយដូចគ្នា ប៉ុន្តែប្រើសមីការផ្សេងគ្នា៖
ISA៖ CVOUT = KP*(Error + (KI*Error*Dt/Ti) + (Kd*Derivative)) + CVBias។
ឯករាជ្យ៖
CVOUT = KP*Error + (KI *Error*Dt/Ti) + (Kd*Derivative) + CVBias
សម្រាប់កម្មវិធីភាគច្រើន អាចប្រើមុខងារ PID ដើម្បីសម្រួលប្រព័ន្ធ។ ប្លុក PID ឯករាជ្យជាទូទៅគឺជារឿងធម្មតាជាង។ នៅក្នុងប្លុក ISA KP ត្រូវបានគុណនឹងផលគុណនៃ (Error + (KI*Error*Dt/Ti) ដែលនឹងផ្លាស់ប្តូរវិធីដែលតម្លៃអន្តរកម្មក្នុងដំណើរការកែតម្រូវ ប៉ុន្តែពួកគេទាំងពីរទទួលបានលទ្ធផលដូចគ្នា។
សមីការគណិតវិទ្យាសាមញ្ញខាងលើអាចបណ្តាលឱ្យមានការភ័ន្តច្រឡំនៅពេលឆ្លងកាត់ដំណើរការលៃតម្រូវ។ ប្លុកមុខងារ Cscape ធ្វើឱ្យដំណើរការលៃតម្រូវកាន់តែងាយស្រួលដោយការបកប្រែវាទៅក្នុងវាលដែលអ្នកប្រើប្រាស់អាចបំពេញ រួមទាំងជម្រើសសម្រាប់ការលៃតម្រូវដោយស្វ័យប្រវត្តិ។
4.2 Cscape Interface និង Ladder Logic
មុខងារ PID អាចត្រូវបានតំឡើងតាមវិធីផ្សេងៗគ្នា។ ការកំណត់រចនាសម្ព័ន្ធខាងក្រោមបង្ហាញពីឡដែលគ្រប់គ្រងសីតុណ្ហភាព PID ជាមួយនឹងឧបករណ៏កំដៅដែលជំរុញដោយការបញ្ជូនតដែលដំណើរការតាមរយៈទិន្នផល PWM ។ អតីតampកម្មវិធី le គឺសាមញ្ញណាស់ ហើយប្រហែលជាមិនបង្ហាញពីភាពស្មុគ្រស្មាញនៃមុខងារ PID នោះទេ។ Escape ក៏អាចប្រើប្រាស់ analog outputs ដើម្បីគ្រប់គ្រងប្រព័ន្ធមួយ។
ចំណាំ៖ មិនមានកម្មវិធីពីរដូចគ្នាទេ។ ប្រើខាងក្រោមជាការណែនាំប៉ុណ្ណោះ។
- នៅក្នុងនេះ អតីតampឡេ ដាក់ទំនាក់ទំនងបិទជាធម្មតានៅដើមឆ្នាំង។ ចុចទ្វេដងលើវា ហើយប្តូរអាសយដ្ឋានសម្រាប់ %S001 សម្រាប់ការស្កេនដំបូង (FST_SCN)។
- បើកប្រតិបត្តិការពិសេសនៅក្នុងប្រអប់ឧបករណ៍គម្រោង។ ជ្រើសរើស PID Independent (ប្រសិនបើចង់បាន PID_ISA ក៏អាចប្រើបានដែរ) – សូមមើលរូបភាព 4.1 ។
- ដាក់ប្លុក PID_IND នៅលើជួរដូចគ្នា។
- ដាក់របុំដែលបើកជាធម្មតាដែលផ្ញើទៅកាន់ទិន្នផលគោលដៅ ដែលនៅទីនេះ = %Q0001 (សូមមើលរូបភាព 4.2) ប្រសិនបើទិន្នផលនេះគឺអាណាឡូក សូមប្រើ %AQ0001។ អតីតample កំពុងប្រើការបញ្ជូនតដើម្បីគ្រប់គ្រងទិន្នផល PWM ដូច្នេះ %Q0001 ត្រូវបានប្រើ

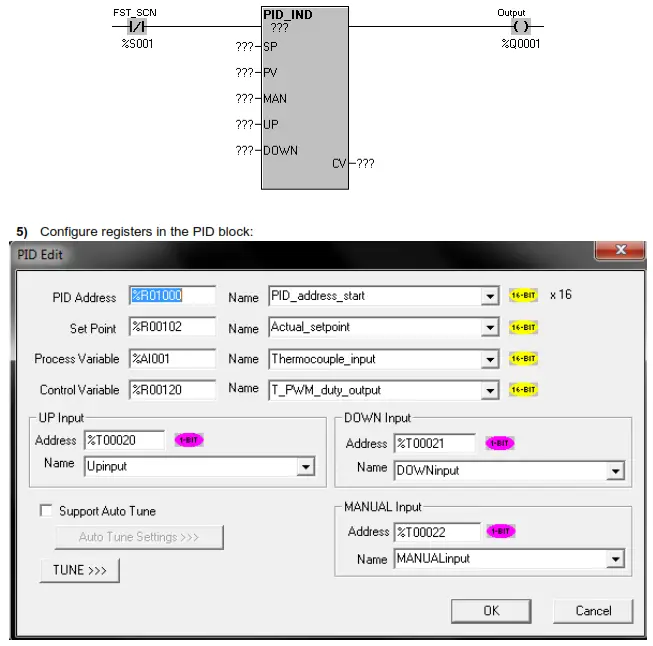
អាសយដ្ឋាន PID៖ ក្រុមនៃការចុះឈ្មោះជាប់គ្នាចំនួន 16 ដែលនឹងត្រូវបានប្រើដើម្បីរក្សាទុកប៉ារ៉ាម៉ែត្របទភ្លេងដែលត្រូវប្រើក្នុងការគណនា PID (ព័ត៌មានលម្អិតបន្ថែមលើការចុះឈ្មោះជាក់លាក់នៅពេលក្រោយ) Set Point: Setpoint គឺជាតម្លៃដែល PID កំពុងព្យាយាមសម្រេចបាន។ តម្លៃដែលដំណើរការអថេរ (PV) មានគោលបំណងឈានដល់។
អថេរដំណើរការ៖ តម្លៃបច្ចុប្បន្នពីដំណើរការ៖ តម្លៃដែល PID កំពុងព្យាយាមផ្លាស់ប្តូរ
អថេរគ្រប់គ្រង៖ លទ្ធផល PID ។ តម្លៃដែលនឹងត្រូវបានប្រើដើម្បីគ្រប់គ្រងដំណើរការដើម្បីនាំយក Process Variable ឆ្ពោះទៅកាន់ SetPoint
ការបញ្ចូលដោយដៃ៖ កុងតាក់ប៊ូលីនដោយដៃ / ស្វ័យប្រវត្តិ។ បញ្ចូលអាសយដ្ឋានដែលបានចុះឈ្មោះ ឬជ្រើសរើសការចុះឈ្មោះដែលមានឈ្មោះ ដែលជាប៊ីតបញ្ចូលដោយដៃដែលគ្រប់គ្រងដោយអ្នកប្រើប្រាស់។ ការចុះឈ្មោះនេះគឺជាការចុះឈ្មោះ Boolean (1-bit) ជាធម្មតា %T ។
ការបញ្ចូល UP៖ ការបញ្ចូលការលៃតម្រូវរបៀបដោយដៃ។ បញ្ចូលអាសយដ្ឋានដែលបានចុះឈ្មោះ ឬជ្រើសរើសការចុះឈ្មោះដែលមានឈ្មោះដែលជាប៊ីត UP Input ដែលគ្រប់គ្រងដោយអ្នកប្រើប្រាស់។ ការចុះឈ្មោះនេះគឺជាការចុះឈ្មោះ Boolean (1-bit) ជាធម្មតា %T ។
ការបញ្ចូលចុះក្រោម៖ ការកែតម្រូវរបៀបចុះក្រោមដោយដៃ។ បញ្ចូលអាសយដ្ឋានដែលបានចុះឈ្មោះ ឬជ្រើសរើសការចុះឈ្មោះដែលមានឈ្មោះ ដែលជាប៊ីតបញ្ចូលដែលគ្រប់គ្រងដោយអ្នកប្រើប្រាស់។ ការចុះឈ្មោះនេះគឺជាការចុះឈ្មោះ Boolean (1 ប៊ីត) ជាធម្មតា %T គាំទ្រកម្មវិធី AutoTune៖ បើកដំណើរការដោយស្វ័យប្រវត្តិ 6) បញ្ចូលដឺក្រេ Celcius ទៅ INT Setpoint សម្រាប់ប្លុក PID
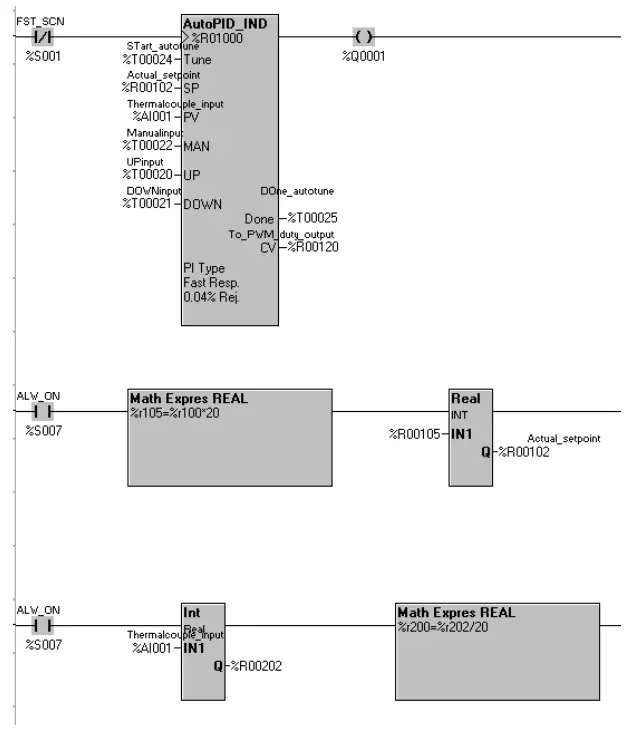
កំណត់ប្លុក Math Expres Real ជាមួយនឹងទំនាក់ទំនង %S007 ALW_ON ដើម្បីកំណត់ “%R105=%r100*20” បន្ទាប់មក កំណត់រចនាសម្ព័ន្ធប្លុក REAL ទៅ INT ដើម្បីបំប្លែងតម្លៃទៅជា %R00102 ដែលជា Actual_setpoint។ (សូមមើលខាងក្រោម)
ចំណាំ៖ នៅក្នុងនេះ អតីតample, %R00100 ត្រូវបានតំឡើងជាវាលដែលអាចកែសម្រួលបាននៅលើអេក្រង់។ អ្នកប្រើកំណត់សីតុណ្ហភាពជាដឺក្រេអង្សារសេ បន្ទាប់មកលេខនេះបំប្លែងលេខនោះទៅជាចំនួនគត់ដែលប្លុកមុខងារ PID ប្រើ។ %R00105 ដើរតួជាកន្លែងដាក់សម្រាប់តម្លៃ ដូចដែលវាឆ្លងកាត់ការបំប្លែង

7) Thermocouple Input Display ជាដឺក្រេ Celcius
ដាក់ប្លុកមុខងារ INT ទៅ REAL ជាមួយទំនាក់ទំនង %S007 ALW_ON ដើម្បីបំប្លែងការបញ្ចូលចំនួនគត់នៃតម្លៃ %AI001 thermocouple_input ទៅជាចំនួនពិតនៅ %R202។ បន្ទាប់មក កំណត់រចនាសម្ព័ន្ធ Math Expres REAL block នៅលើ rung ដើម្បីបំប្លែង %R202 thermocouple input ទៅជាអង្សាសេសម្រាប់អេក្រង់បង្ហាញ (%R200)។
ចំណាំ៖ នៅក្នុងនេះ អតីតample, %R200 នឹងត្រូវបានប្រើដើម្បីបង្ហាញនៅលើអេក្រង់ជាសីតុណ្ហភាពជាក់ស្តែងគិតជាអង្សាសេ។ ប្រសិនបើ Fahrenheit ត្រូវបានគេពេញចិត្ត គ្រាន់តែជំនួសសមីការក្នុងប្រអប់ Math Express REAL ដើម្បីបំប្លែងទៅជារង្វាស់ផ្សេង។

8) បង្កើតអេក្រង់ដែលមានមុខងារដើម្បីបង្ហាញ ឬផ្លាស់ប្តូរវាលជាក់លាក់នៃកម្មវិធី ដូចជាការផ្លាស់ប្តូរ setpoint ជាមួយ %R102 ខាងលើ ឬបង្ហាញសីតុណ្ហភាពក្នុងទម្រង់ក្រាហ្វនៃការបញ្ចូលសីតុណ្ហភាពពី thermocouple ដូចជា %R200 ខាងលើ។ ផងដែរ ទាំងរបារស្លាយ ឬវាលដែលអាចកែសម្រួលបានអាចត្រូវបានបង្កើតនៅលើអេក្រង់ ដើម្បីធ្វើឱ្យវាកាន់តែងាយស្រួល និងរហ័សក្នុងការផ្លាស់ប្តូរលក្ខខណ្ឌ PID ដោយដៃសម្រាប់គោលបំណងកែតម្រូវ។
កូដខាងក្រោមបង្ហាញពីជំហានមុនទាំងអស់ដែលបានបញ្ចប់ជាមួយនឹងការដំឡើង Auto-Tune នៅលើប្លុក PID៖
4.3 របៀប PWM
សម្រាប់កម្មវិធីណាមួយដែលទាមទារទិន្នផលឌីជីថល (ម៉ាស៊ីនកម្តៅដែលត្រូវបានគ្រប់គ្រងដោយការបញ្ជូនត ឬលទ្ធផលឌីជីថល) របៀប PWM គឺជាជម្រើសមួយ។ វានឹងផ្លាស់ប្តូរថាមពលដែលឆ្លងកាត់ប្លុកជាសញ្ញា PWM ។ ដើម្បីគ្រប់គ្រងទិន្នផលតាមវិធីនេះ ឧបករណ៏ត្រូវតែដាក់នៅផ្នែកម្ខាងទៀតនៃប្លុក PID ។
សម្រាប់របៀប PWM, កម្រិតខ្ពស់amp និង cl ទាបamp ត្រូវតែដាក់នៅ 32000 និង -32000 រៀងគ្នា។ -32000 គឺជាវដ្ដកាតព្វកិច្ច 0% ហើយ 32000 គឺជាវដ្ដកាតព្វកិច្ច 100%
ពេលវេលាវដ្ត PWM៖ ពេលវេលាវដ្ត PID កំណត់ថាតើ PID នឹងបើក និងបិទញឹកញាប់ប៉ុណ្ណា។ វានឹងប្តូររហូតដល់មួយដងក្នុងអំឡុងពេលវដ្ត។ ប្រសិនបើពេលវេលាវដ្តត្រូវបានទុកនៅ 0 ប្លុក PID នឹងបញ្ជូនថាមពលនៅពេលណាដែលតម្លៃ CV វិជ្ជមាន និងមិនឆ្លងកាត់ថាមពលនៅពេលដែលតម្លៃ CV អវិជ្ជមាន ជួនកាលនេះគឺជារបៀបប្រតិបត្តិការដែលចង់បាន។
ការជ្រើសរើសពេលវេលាវដ្តត្រឹមត្រូវសម្រាប់ប្រតិបត្តិការអាចមានសារៈសំខាន់ខ្លាំងណាស់ព្រោះវានឹងប៉ះពាល់ដោយផ្ទាល់ថាតើញឹកញាប់ប៉ុណ្ណាដែលលទ្ធផលរបស់អ្នកនឹងប្តូរពី ON ទៅ OFF ។ ប្រសិនបើអ្នកមានការពាក់រាងកាយណាមួយដែលបណ្តាលមកពីការបង្វែរទិន្នផលពី ON ទៅ OFF (ដូចជានៅក្នុងការបញ្ជូនត) វានឹងជួយកំណត់ថាតើវាផ្លាស់ប្តូរញឹកញាប់ប៉ុណ្ណា។
4.4 ចំណុចកំណត់
នៅពេលប្រើប្លុក PID ប៉ារ៉ាម៉ែត្រលៃតម្រូវទាំងអស់ត្រូវបានរក្សាទុកនៅក្នុងប្លុកពាក្យបញ្ជា។ ប្រសិនបើការចុះឈ្មោះ %R ត្រូវបានប្រើប្រាស់ ទិន្នន័យនេះត្រូវបានរក្សាទុក មានន័យថាវានឹងស្ថិតនៅក្នុងបញ្ជីបន្ទាប់ពីវដ្តថាមពល។
ប្រសិនបើកម្មវិធី PID នឹងត្រូវបានដាក់ចូលទៅក្នុងឧបករណ៍បញ្ជាផ្សេងទៀត បញ្ចូលការចុះឈ្មោះដែលភ្ជាប់ជាមួយមុខងារ PID ។ នេះអាចត្រូវបានធ្វើតាមរយៈមុខងារផ្លាស់ទី ឬតាមរយៈចំណុចកំណត់។
នៅពេលប្រើមុខងារផ្លាស់ទី ព័ត៌មានទាក់ទងនឹងអ្វីដែលអ្នកចុះឈ្មោះនីមួយៗមាននៅក្នុងប្លុកត្រួតពិនិត្យ PID ។ ចំណុចកំណត់អាចទទួលបានដោយប្រើប៊ូតុង Save Setpoints នៅក្នុងម៉ឺនុយលៃតម្រូវ PID ។
នៅពេលប្រើចំណុចកំណត់ វាជាការសំខាន់ក្នុងការធ្វើឱ្យប្រាកដថាចំណុចកំណត់បញ្ចូលតម្លៃ PID ។ ដើម្បីធ្វើដូច្នេះ CsCape អាចត្រូវបានបង្កើតឡើងដើម្បីទាញយកចំណុចកំណត់ទៅក្នុងឧបករណ៍បញ្ជា។
ទៅ កម្មវិធី → ជម្រើសទាញយក ហើយត្រូវប្រាកដថាប្រអប់ធីកដែលនិយាយថាតារាងកំណត់ត្រូវបានធីក។
ចុះឈ្មោះ ២០២០
ធាតុ PID ទាំងពីរត្រូវការអារេនៃការចុះឈ្មោះដប់ប្រាំមួយ (16) WORD (16 ប៊ីត) ។ ជាធម្មតាទាំងនេះនឹងជាប្រភេទ %R ។ វាត្រូវបានគេហៅថាអារេយោង។
ធាតុ PID នីមួយៗត្រូវតែប្រើអារេយោងដាច់ដោយឡែកពីគ្នា ទោះបីជាតម្លៃដូចគ្នាបេះបិទទៅនឹងធាតុ PID ដែលមានស្រាប់ក៏ដោយ។ មិនអាចមានការត្រួតស៊ីគ្នានៃធាតុ PID ទេ។
ការចុះឈ្មោះនៅអុហ្វសិត 0 ដល់ 9 ត្រូវតែកំណត់រចនាសម្ព័ន្ធ មុនពេលធាតុ PID ត្រូវបានប្រើ។
| ចុះឈ្មោះ អុហ្វសិត | ប៉ារ៉ាម៉ែត្រ | ឯកតា | ជួរ | ការពិពណ៌នា |
| 0 | Sampសម័យកាល | ១៨.៣ ម | ២៩ ដល់ ៣៨ | រយៈពេលខ្លីបំផុតក្នុងការបង្កើន 10 mS ត្រូវបានអនុញ្ញាតរវាងដំណោះស្រាយ PID |
|
1 |
ក្រុមតន្រ្តីស្លាប់ + |
PV រាប់ |
២៩ ដល់ ៣៨ |
កំណត់ដែនកំណត់ខាងលើ និងខាងក្រោមនៃក្រុម Dead Band នៅក្នុងលក្ខខណ្ឌនៃការរាប់ PV ។ ទាំងពីរគួរតែត្រូវបានកំណត់ទៅ 0 រហូតដល់ PID ត្រូវបានលៃតម្រូវ។ បន្ទាប់មក Dead Band ប្រហែលជាចាំបាច់ដើម្បីការពារការផ្លាស់ប្តូរតិចតួចនៅក្នុងតម្លៃ CV ដោយសារតែមានការប្រែប្រួលបន្តិចបន្តួច។ |
|
2 |
ក្រុមតន្រ្តីស្លាប់ - |
PV រាប់ |
ពី 0 ទៅ -3200 |
|
| 3 | ប្រាក់ចំណេញសមាមាត្រ (KP) ភាគរយ | ភាគរយ | 0 ទៅ 327.67% | កំណត់កត្តាចំណេញសមាមាត្រគិតជាភាគរយ។ 100 កំណត់ការទទួលបានឯកភាព (ទទួលបាន 1) ។ |
| 4 | ប្រាក់ចំណេញដេរីវេ (Kd) | ១៨.៣ ម | ២៩ ដល់ ៣៨
វិនាទី |
បញ្ចូលជាពេលវេលាដែលមានដំណោះស្រាយ 10 mS ។ នៅក្នុងសមីការ PID នេះមានឥទ្ធិពល។ |
|
5 |
អត្រាអាំងតេក្រាល (KI) |
ធ្វើម្តងទៀតក្នុង 1000 វិនាទី | ២៩ ដល់ ៣៨
ធ្វើម្តងទៀតក្នុងមួយវិនាទី |
បញ្ចូលជាចំនួននៃការធ្វើម្តងទៀតក្នុងមួយវិនាទី។ អត្រានៃការរួមបញ្ចូល។ |
| 6 | CV Bias | ចំនួន CV | -១០០ ទៅ
+32000 |
ចំនួន CV រាប់បញ្ចូលទៅក្នុងលទ្ធផលមុនអត្រា និង ampliude clamps. |
| 7 | CV Upper Clamp | ចំនួន CV | -១០០ ទៅ
+32000 |
ចំនួន CV មួយចំនួនតំណាងឱ្យតម្លៃខ្ពស់បំផុត និងទាបបំផុតសម្រាប់ CV ។ CV Upper Clamp ត្រូវតែមានភាពវិជ្ជមានច្រើនជាង CV Lower Clamp. |
| 8 | CV ទាប Clamp | ចំនួន CV | -១០០ ទៅ
+32000 |
|
|
9 |
ពេលវេលា Slew អប្បបរមា |
វិនាទីនៃការធ្វើដំណើរពេញ |
២៩ ដល់ ៣៨
វិនាទីដើម្បីផ្លាស់ទី 32000 CV រាប់ |
កំណត់ថាតើតម្លៃ CV អាចផ្លាស់ប្តូរបានលឿនប៉ុណ្ណា។ |
| 10 | កំណត់រចនាសម្ព័ន្ធពាក្យ | គ្មាន | គ្មាន | ការប្រើប្រាស់ផ្ទៃក្នុង - កុំកែប្រែតម្លៃនេះ។ |
|
11 |
ពាក្យបញ្ជាដោយដៃ |
ចំនួន CV |
តាមដានដោយស្វ័យប្រវត្តិនៅក្នុងរបៀបស្វ័យប្រវត្តិ; កំណត់ CV នៅក្នុងរបៀបដោយដៃ | នៅក្នុងរបៀបស្វ័យប្រវត្តិ ការចុះឈ្មោះនេះតាមដានតម្លៃ CV ។ នៅក្នុងរបៀបដោយដៃ ការចុះឈ្មោះនេះមានតម្លៃដែលចេញទៅកាន់ CV ក្នុង clamp និងដែនកំណត់។ |
| 12 | SP ផ្ទៃក្នុង | ប្រើដោយ OCS | គ្មាន | តាមដាន SP ចូល |
| 13 | PV ខាងក្នុង | ប្រើដោយ OCS | គ្មាន | តាមដាន PV ចូល |
| 14 | CV ខាងក្នុង | ប្រើដោយ OCS | គ្មាន | តាមដាន CV ចេញ |
| 15 | ពេលវេលាវដ្ត | វិនាទី | គ្មាន | ពេលវេលាវដ្តសម្រាប់ PWM គិតជាវិនាទី |
ការលៃតម្រូវ
5.1 ប៉ារ៉ាម៉ែត្របទភ្លេង
វាជាការសំខាន់ដើម្បីដឹងពីរបៀបដែលប៉ារ៉ាម៉ែត្រនៅក្នុងមុខងារប្លុក PID ។ ខាងក្រោមនេះ និយមន័យសម្រាប់តម្លៃនីមួយៗត្រូវបានរាយបញ្ជី៖
| ប៉ារ៉ាម៉ែត្រ | និយមន័យ |
| Sampរយៈពេល៖ | ពេលវេលាដែលអនុញ្ញាតរវាងការគណនា PID គឺជារបៀបដែលញឹកញាប់ដែលឧបករណ៍បញ្ជានឹងគណនាតម្លៃ CV ថ្មី។ |
| ក្រុមតន្រ្តីស្លាប់ +/- | ក្រុម dead band ត្រូវបានប្រើដើម្បីការពារការផ្លាស់ប្តូរតូចតាចនៅក្នុង Control Variable តម្លៃដែលអាចបណ្តាលមកពីការផ្លាស់ប្តូរតូចៗនៅក្នុងដំណើរការអថេរនៅពេលវាជិតដល់ចំណុចកំណត់។ វាបង្កើតជួរតម្លៃជុំវិញចំណុចកំណត់ ប្រសិនបើអថេរដំណើរការស្ថិតនៅក្នុងជួរនេះ នោះអថេរវត្ថុបញ្ជានឹងមិនផ្លាស់ប្តូរទេ។ |
| ប្រាក់ចំណេញសមាមាត្រ (Kp): | នេះគឺជាតម្លៃដែលទទួលបានដែលត្រូវបានភ្ជាប់ដោយផ្ទាល់ជាមួយតម្លៃកំហុសបច្ចុប្បន្ន នេះគឺជា KP ពីសមីការ PID ។ |
| ប្រាក់ចំណេញដេរីវេ (Kd): | សម្រាប់កម្មវិធីភាគច្រើន Derivative Gain គឺមិនចាំបាច់ទេ។ តម្លៃទទួលបាននេះត្រូវបានបញ្ចូលជាមួយនឹងដំណោះស្រាយ 10mS តម្លៃនេះត្រូវបានប្រើដើម្បីធ្វើឱ្យអថេរគ្រប់គ្រងឆ្លើយតបទៅនឹងការផ្លាស់ប្តូរភ្លាមៗនៅក្នុងអថេរដំណើរការ |
| ការទទួលបានអាំងតេក្រាល (Ki): | ការកើនឡើងអាំងតេក្រាលត្រូវបានប្រើដើម្បីនាំយកតម្លៃមធ្យមនៃអថេរដំណើរការស្មើនឹងចំណុចដែលបានកំណត់តាមពេលវេលា។ វានឹងសម្រេចបានដោយប្រើអាំងតេក្រាលមួយដើម្បីស្វែងរកកំហុសសរុបក្នុងរយៈពេលដែលបានផ្តល់ឱ្យ ហើយធ្វើការកែតម្រូវទៅអថេរគ្រប់គ្រង។ ប្រសិនបើអថេរដំណើរការនៅឆ្ងាយពីចំណុចកំណត់សម្រាប់រយៈពេលដ៏យូរ ភាពលំអៀងនេះអាចបង្កើតបាន។ នៅពេលដែលវាត្រូវបានបង្កើតឡើង វាអាចចំណាយពេលបន្តិចក្នុងការផ្លាស់ប្តូរ នេះជាអ្វីដែលត្រូវប្រុងប្រយ័ត្ននៅក្នុងដំណើរការដែលអាចនឹងមានរយៈពេលយូរនៅចំណុចមួយ ហើយបន្ទាប់មកធ្វើការផ្លាស់ប្តូរដ៏ធំមួយទៅមួយផ្សេងទៀត។ |
| CV Bias៖ | នេះគឺជាតម្លៃដែលត្រូវបានបន្ថែមទៅអថេរ Control បន្ទាប់ពីការគណនាបានកើតឡើង។ អថេរវត្ថុបញ្ជានឹងត្រូវបានគណនា ភាពលំអៀងនឹងត្រូវបានបន្ថែមនៅក្នុង ហើយបន្ទាប់មក slew ឬ ampដែនកំណត់ Litude នឹងចូលជាធរមាន។ |
| CV ខាងលើ និងខាងក្រោម clamp: | អថេរវត្ថុបញ្ជាមិនអាចខ្ពស់ជាង cl ខាងលើទេ។amp ហើយវាមិនអាចទាបជាង cl ទាបទេ។amp. វានឹងធ្វើឱ្យប្រាកដថាអថេរគ្រប់គ្រងរបស់អ្នកស្ថិតនៅក្នុងជួរដែលបានកំណត់។ |
| ពេលវេលា Slew អប្បបរមា៖ | វានឹងកំណត់ល្បឿនដែលអថេរត្រួតពិនិត្យនឹងផ្លាស់ប្តូរ។ ឯកតាគឺជាចំនួនវិនាទីដែលវាត្រូវការដើម្បីផ្លាស់ទីពី 0 ទៅ 32000 ដូច្នេះអត្រាយឺតនៃ 64 នឹងអនុញ្ញាតឱ្យការផ្លាស់ប្តូរអថេរគ្រប់គ្រងមិនលើសពី 500 រាប់ក្នុងមួយវិនាទី។ |
| ពេលវេលាវដ្ត (សម្រាប់តែរបៀប PWM)៖ | នេះគឺជាវដ្តកាតព្វកិច្ចសម្រាប់មុខងារលទ្ធផល PWM ក្នុងរយៈពេលប៉ុន្មានវិនាទី វាអាចត្រូវបានប្រើដើម្បីកំណត់ថាតើញឹកញាប់ប៉ុណ្ណាដែលលទ្ធផលនឹងប្តូរពី ON ទៅ OFF ។ ប្រសិនបើនេះទុកនៅ 0 នោះប្លុកនឹងបញ្ជូនថាមពលប្រសិនបើ CV គឺ 0 ឬធំជាង និងមិនឆ្លងកាត់ថាមពលប្រសិនបើ CV តិចជាង 0 ។ |
5.2 ការលៃតម្រូវដោយដៃ
ការលៃតម្រូវដោយដៃ KP
សម្រាប់កម្មវិធីជាច្រើន ការលៃតម្រូវដោយដៃរហ័ស គឺជាអ្វីដែលចាំបាច់ កម្មវិធីភាគច្រើននឹងប្រើតម្លៃ KP និងតម្លៃ KI តូច។ នៅពេលកំណត់តម្លៃដំបូង វាអាចមានប្រយោជន៍ view PID ទាក់ទងនឹងគណិតវិទ្យា។ ឧample ៖ សម្រាប់កម្មវិធីគ្រប់គ្រងសីតុណ្ហភាព ដើម្បីសម្រេចថាតើតម្លៃ KP គួរតែចាប់ផ្តើមនៅត្រង់ណា
សីតុណ្ហភាព៖
- សម្រាប់អតីតample សម្រាប់ទិន្នផលអតិបរមា (32,000) នៅពេលសីតុណ្ហភាពរបស់ខ្ញុំមានយ៉ាងហោចណាស់ 20° ក្រោមចំណុចកំណត់
- បម្លែង 20° ទៅជាចំនួនឆៅពីការបញ្ចូលអាណាឡូក ប្រសិនបើការបញ្ចូលមានគុណភាពបង្ហាញ 0.05° នោះវានឹងផ្តល់ចំនួនឆៅ 400
- សមីការដែលគ្រាន់តែទទួលបានថេរគឺ CVOUT = KP* Error ចាប់តាំងពី CVOUT និង Error ត្រូវបានគេស្គាល់ បំពេញសមីការ 32000 = KP*400 32000/400 = KP KP = 80
- ឥឡូវនេះយើងមានចំណុចចាប់ផ្តើមសម្រាប់ KP វាមានសារៈសំខាន់ណាស់ក្នុងការសាកល្បងវានៅក្នុងកម្មវិធីជាក់ស្តែង
ការលៃតម្រូវដោយដៃ KI
សម្រាប់កម្មវិធីភាគច្រើន តម្លៃ KI មិនចាំបាច់ធំពេកទេ។ មានចំណុចមួយចំនួនដែលត្រូវពិចារណានៅពេលកំណត់ថាតើប្រភេទ KI តម្លៃអ្វីដែលកម្មវិធីរបស់អ្នកគួរតែមាន។
វិធីដែលតម្លៃអាំងតេក្រាលដំណើរការគឺវាត្រូវការអាំងតេក្រាលនៃកំហុសក្នុងរយៈពេលមួយ ហើយបន្ថែមវាទៅភាពលំអៀង CV "មើលមិនឃើញ" ។ វានឹងបន្តកើនឡើង ឬថយចុះរហូតដល់ PV របស់អ្នកជាមធ្យមជាចំណុចកំណត់របស់អ្នក។
ប្រសិនបើដំណើរការយឺត សូមប្រយ័ត្នចំពោះតម្លៃដ៏ធំនៅក្នុង "មើលមិនឃើញ" លំអៀងនេះ។ ប្រសិនបើមានការផ្លាស់ប្តូរនៅក្នុង setpoint តម្លៃនេះប្រហែលជាមិនផ្លាស់ប្តូរលឿនទេ ហើយអាចធ្វើឱ្យពេលវេលាឆ្លើយតបនៃប្រព័ន្ធរបស់អ្នកយឺតជាងយ៉ាងខ្លាំង។
គណិតវិទ្យា៖
Integral_Bias = Integral_Bias + Ki*.001(dt, ពេលវេលាបានកន្លងផុតទៅចាប់តាំងពីការវាស់វែងចុងក្រោយគិតជាវិនាទី)* error
សម្រាប់ភាពសាមញ្ញ សូមក្រឡេកមើលការកើនឡើងក្នុងរយៈពេលមួយវិនាទី ហើយសន្មតថាសម្រាប់រយៈពេលនៃទីពីរ ដំណើរការអថេរនៅតែមិនផ្លាស់ប្តូរ។
Example(s): SetPoint = 1000 អថេរដំណើរការ = 800
| Ki | ការផ្លាស់ប្តូរនៅក្នុង Control variable ក្នុងមួយវិនាទី |
| 100 | 20 |
| 250 | 50 |
| 600 | 120 |
| 1000 | 200 |
គ្រោះថ្នាក់ដ៏ធំជាមួយនឹងអាំងតេក្រាលគឺថាវាតែងតែសកម្ម។ ប្រសិនបើដំណើរការចាប់ផ្តើមដោយចំណុចកំណត់នៃ 5000 អថេរដំណើរការចាប់ផ្តើមនៅ 2000 ហើយអថេរដំណើរការត្រូវចំណាយពេល 3 នាទីដើម្បីទៅដល់ចំណុចដែលបានកំណត់ ពេលនោះជាមួយនឹងតម្លៃ Ki នៃ 100 នៅពេលនោះ Bias នឹងមានតម្លៃ។ នៃ 27000 រាប់។ នេះទំនងជានឹងនាំឱ្យមានការហួសប្រមាណសម្រាប់អថេរដំណើរការ។
5.3 ការលៃតម្រូវប្លុក PID ដោយស្វ័យប្រវត្តិ
| ការកំណត់សម្រាប់ PID Auto-Tune | |
| ចាប់ផ្តើមកំណត់អាសយដ្ឋានស្វ័យប្រវត្តិ | អាសយដ្ឋាន 1 ប៊ីតដែលនឹងត្រូវបានកំណត់ខ្ពស់ក្នុងអំឡុងពេលដំណើរការលៃតម្រូវដោយស្វ័យប្រវត្តិ |
| កំណត់អាសយដ្ឋានរួចរាល់ដោយស្វ័យប្រវត្តិ | អាសយដ្ឋាន 1 ប៊ីតដែលនឹងត្រូវបានកំណត់ខ្ពស់បន្ទាប់ពីដំណើរការលៃតម្រូវដោយស្វ័យប្រវត្តិបានបញ្ចប់ |
| ប្រភេទបទភ្លេងដោយស្វ័យប្រវត្តិ | ម៉ឺនុយទម្លាក់ចុះដើម្បីជ្រើសរើសប្រភេទនៃការលៃតម្រូវដែលនឹងត្រូវបានធ្វើ។ អក្សរទាំងបីដែលនីមួយៗតំណាងឱ្យប្រភេទនៃប្រាក់ចំណេញសមាមាត្រ អាំងតេក្រាល ដេរីវេ។ ទាំងបីអាចត្រូវបានជ្រើសរើស សមាមាត្រ និងអាំងតេក្រាល ឬគ្រាន់តែសមាមាត្រ។ (PID, PI, ឬ P រៀងគ្នា) |
| តម្រងសំលេងរំខាន | ការត្រងសំលេងរំខានកំណត់ថាតើចំនួនប៉ុន្មានខាងលើ និងខាងក្រោមចំណុចកំណត់ដែលដំណើរការ Auto-Tune ត្រូវតែទៅដើម្បីទទួលបានការវាស់វែងរបស់វា។ វានឹងការពារសំឡេងរំខាននៅក្នុងការវាស់ពីសញ្ញាថា auto Tune បានដល់ចំណុចកំណត់ដែលចង់បានមុនពេលពេញវ័យ។ ភាគរយtage គឺផ្អែកលើមាត្រដ្ឋានពេញ (32000 រាប់) និងចន្លោះពី 0.04% (~13 រាប់) ដល់% 5 (1600 រាប់) |
| ការឆ្លើយតបរបស់ឧបករណ៍បញ្ជា | កំណត់ "ល្បឿន" នៃការឆ្លើយតបដែលត្រូវបានលៃតម្រូវដោយស្វ័យប្រវត្តិ។ លឿន វានឹងធ្វើឱ្យមានការឡើងហួសកម្រិត ប៉ុន្តែមកដល់ចំណុចកំណត់លឿនជាងមុន មធ្យម វានឹងមានការហក់ឡើងបន្តិច ហើយមកដល់ចំណុចកំណត់យឺតបន្តិច យឺត នឹងមិនបង្កើតការហួសប្រមាណ, យឺតណាស់។ ប្រហែលជាត្រូវជ្រើសរើសសម្រាប់ដំណើរការដែល "នៅក្រៅជួរល្អបំផុតសម្រាប់ច្បាប់ Zeigler-Nichols" - ប្រព័ន្ធរសើបខ្លាំង |
| បទភ្លេងនៅ 2/3 Setpoint | អនុញ្ញាតឱ្យការពិសោធន៍លៃតម្រូវដោយស្វ័យប្រវត្តិដើម្បីផ្លាស់ប្តូរលទ្ធផលដោយផ្អែកលើ 2/3 ចំណុចដែលបានកំណត់។ ប្រើជម្រើសនេះនៅពេលដែលវាមិនចង់បានសម្រាប់ដំណើរការដើម្បីធ្វើដំណើរខាងលើចំណុចដែលបានកំណត់កំឡុងពេលពិសោធន៍ការលៃតម្រូវដោយស្វ័យប្រវត្តិ។ |
មុនពេលដំឡើងដោយស្វ័យប្រវត្តិ ត្រូវប្រាកដថាដំឡើងតម្លៃខាងក្រោមនៅក្នុងប្លុក PID៖
- កំណត់គោលដៅ
- Sampសម័យកាល
- ខាងលើ និងខាងក្រោម Clamp
- ពាក្យកំហុស,
- លទ្ធផលប៉ូឡូញ
នៅពេលដែលការកំណត់ទាំងអស់រួចរាល់ សូមកំណត់ Start Auto-Tune bit High (ទាំងនៅក្នុង Data Watch ឬនៅក្នុង code) ប្រព័ន្ធនឹងគ្រប់គ្រង ហើយធ្វើអោយ Process Variable ឡើងលើ និងខាងក្រោម setpoint ជាច្រើនដងបន្ទាប់ពីវាមាន ការវាស់វែងទាំងអស់ដែលវាត្រូវការ ប៊ីត AutoTune_Done នឹងឡើងខ្ពស់ ហើយប្លុក PID នឹងត្រលប់ទៅស្ថានភាពចុងក្រោយរបស់វាវិញជាមួយនឹងតម្លៃសមាមាត្រ និស្សន្ទវត្ថុ និងអាំងតេក្រាលដែល "ធ្វើឱ្យប្រសើរ" នៅនឹងកន្លែង។ នៅក្នុង CsCape បើកប្លុក PID ដើម្បីមើលតម្លៃ រក្សាទុកវាជាចំណុចកំណត់ថ្មី ឬកំណត់ចំណាំសម្រាប់ការប្រើប្រាស់នាពេលអនាគត។
ជំនួយបច្ចេកទេស
អាមេរិកខាងជើង
ទូរស័ព្ទ៖ ៨៦៦-៤៤៧-២១៩៤
ទូរសារ៖ ៨៦៦-៤៤៧-២១៩៤
http://www.heapg.com
អ៊ីមែល៖ techsppt@heapg.com
អឺរ៉ុប
ទូរស័ព្ទ៖ +353-21-4321266
ទូរសារ៖ +353-21-4321826
http://www.horner-apg.com
អ៊ីមែល៖ tech.support@horner-apg.com
ឯកសារ/ធនធាន
 |
ប្រព័ន្ធ និងឧបករណ៍បញ្ជា HORNER Cscape PID [pdf] ការណែនាំអ្នកប្រើប្រាស់ ប្រព័ន្ធ និងឧបករណ៍បញ្ជា Cscape PID |



