Netzer DS-25 codificatore assoluto di risoluzione a 17 bit

Prefazione
- Versione 2.0: Novembre 2021
Documenti applicabili
- Scheda dati di codificatore elettricu DS-25
Prutezzione ESD
Comu di solitu per i circuiti elettronichi, durante a manipulazione di u produttu ùn tocca micca circuiti elettronichi, fili, connettori o sensori senza prutezzione ESD adatta. L'integratore / operatore deve aduprà l'equipaggiu ESD per evità u risicu di danni à u circuitu.
ATTENZIONE
OBSERVATE PRECAUTIONS PER A MANIPULAZIONE DEI DISPOSITIVI SENSIBILI ELECTROSTATIC
Product Overview
Overview
L'Electric Encoder™ di posizione assoluta DS-25 hè un sensore di posizione rivoluzionariu sviluppatu inizialmente per applicazioni critiche in ambienti duri. Attualmente, esegue in una larga gamma di applicazioni, cumprese a difesa, a sicurità di a patria, l'aerospaziale è l'automatizazione medica è industriale. A tecnulugia Electric Encoder™ senza cuntattu si basa in una interazzione trà u spustamentu misuratu è un campu elettricu modulatu in u spaziu / tempu. U DS-25 Electric Encoder ™ hè semi-modulare, vale à dì, u so rotore è u so stator sò separati, cù u statore allughjendu in modu sicuru u rotore.
- Encoder stator
- Rotore di codificatore
- Montaggio di codificatore clamps
- Attaccu di rotore
- Interfaccia di cable

Schema di flussu di l'installazione
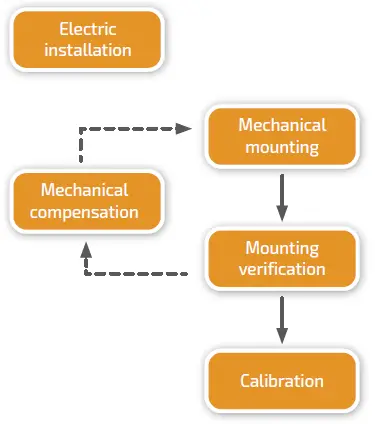
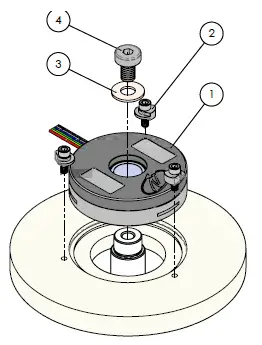
Montatura di l'encoder
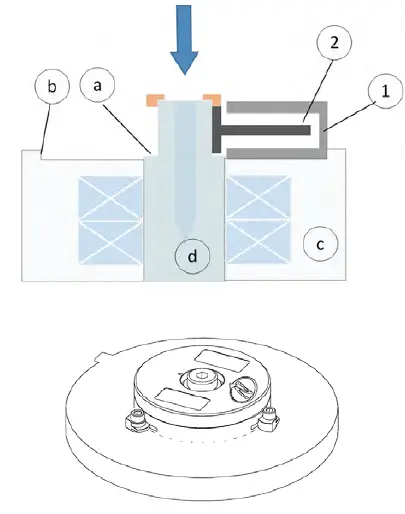
U rotore di codificatore (2) si attacca à l'arburu di l'ospite (d) premendu contru à una spalla dedicata (a), una vite è una rondella o una molla circular è una rondella à a fine di l'spalla per mantene a pressione, forza cunsigliata di 0.3 Nm. cù una vite M3.
U stator di codificatore (1) hè centratu da u passu circunferenziale (b) è attaccatu à u stator host (c) cù trè codificatori cl.amps, forza consigliata di 0.3 Nm con l'encoder cl in dotazioneamps.
Nota:
Ùn aduprate micca materiali di serratura à viti chì cuntenenu Cyanoacrylate chì interagiscenu in modu aggressivu cù u corpu di sensore fattu di Ultem.
Encoder stator/Rotor posizione relative
U rotore hè flottante, per quessa, per a distanza di muntatura axial relative "H" adattata trà l'spalla di l'arbre (b) è l'incavità di muntatura di u stator (a) deve esse nominali di 1.4 mm.
Per facilità di cumpensu di muntatura meccanica da shims di u rotore, a distanza cunsigliata hè 1.4 - 0.05 mm, rendendu output analogicu. U megliu cunsigliatu ampI valori di litudine sò à mezu à l'intervallu secondu quelli mostrati in u software Encoder Explorer è varienu secondu u tipu di codificatore.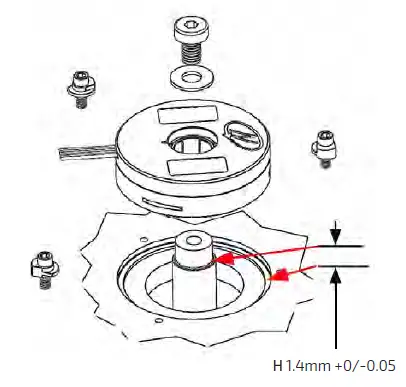
U DS-25 ampcompensazione di litudini
A compensazione meccanica usendu 50 um shims sottu à u rotore (disponibile cum'è kit DS-25-R-00), aumenterà u ampLivellu di litudine da ~ 50 mV. Verificate a stallazione curretta di u rotore cù l'attrezzi Encoder Explorer "Analizzatore di signale" o "Verificazione di l'installazione meccanica".
Nota: per più infurmazione, leghjite u paragrafu 6
Unpacking
Ordine standard
U pacchettu di u DS-25 standard cuntene l'encoder cù un cable schermatu di 250 mm AWG30 è EAPK004 kit di muntatura di codificatore clamps, (3 clamps, 0-80 UNF HEX Vite a brugola L 3/16”, SS )
Accessori opzionali:
- DS-25-R-00, Kit di shims di rotore (x10 shims in acciaio inox, 50um ognunu)
- MA-DS25-004, Kit di installazione finale di l'albero (vite M3x5 + rondella)
- CNV-00003, RS-422 à u cunvertitore USB (Modu Configurazione)
- NanoMIC-KIT-01, cunvertitore RS-422 à USB. Configurazione è modi operativi via l'interfaccia SSi /BiSS.
- DKIT-DS-25-SF-S0, Encoder SSi montatu nantu à un jig rotativu, cunvertitore RS-422 à USB è cavi.
- DKIT-DS-25-IF-S0, Encoder BiSS montatu nantu à una jig rotativu, cunvertitore RS-422 à USB è cavi.
Interconnessione elettrica
Stu capitulu riviews i passi necessarii per cunnette elettricamente l'encoder cù l'interfaccia digitale (SSi o BiSS-C).
Cunnettendu l'encoder
L'encoder hà dui modi operativi:
Posizione assoluta sopra SSi o BiSS-C:
Questu hè u modu predeterminatu di putenza
Codice di culore di i fili di l'interfaccia SSi / BiSS
| Orologio + | Grisgiu |
Clock |
| Orologio - | Turchinu | |
| Dati - | Ghjallu |
Dati |
| Dati + | Verde | |
| GND | Neru | Terra |
| + 5 V | Rossu | Alimentazione elettrica |
Modu di installazione nantu à NCP (Netzer Communication Protocol)
Stu modu di serviziu furnisce accessu via USB à un PC chì esegue l'applicazione Netzer Encoder Explorer (in MS Windows 7/10). A cumunicazione hè via Netzer Communication Protocol (NCP) nantu à RS-422 utilizendu u stessu set di fili. Aduprate l'assignazione di pin seguente per cunnette l'encoder à un connettore D-type 9-pin à u cunvertitore RS-422/USB CNV-0003 o NanoMIC.
Interfaccia di codificatore elettricu, D Type 9 pin Femmina
| Descrizzione | Culore | Funzione | Pin No |
|
SSi Clock / NCP RX |
Grisgiu | Clock / RX + | 2 |
| Turchinu | Clock / RX - | 1 | |
|
SSi Data / NCP TX |
Ghjallu | Dati / TX - | 4 |
| Verde | Dati / TX + | 3 | |
| Terra | Neru | GND | 5 |
| Alimentazione elettrica | Rossu | + 5 V | 8 |
Cunnessione elettrica è messa a terra
L'encoder ùn vene micca cun un cable è un connettore specifichi, però, osservate e considerazioni di messa a terra:
- U scudo di u cable ùn hè micca cunnessu à a linea di ritornu di l'alimentazione.
- Mettite a terra l'arbulu di l'ospiti per evità l'interferenza da u sistema di l'ospite, chì puderia risultatu in u rumore internu di l'encoder.
Nota: 4.75 à 5.25 VDC alimentazione necessaria
Installazione di software
U software Electric Encoder Explorer (EEE):
- Verifica a correttezza di a stallazione meccanica
- Calibrazione di l'offsets
- Configura l'analisi generale è di signale
Stu capitulu riviews i passi assuciati cù l'installazione di l'applicazione software EEE.
Requisiti minimi
- Sistema upirativu: MS Windows 7/10, (32/64 bit)
- Memoria: 4 MB di minimu
- Porti di cumunicazione: USB 2
- Windows .NET Framework, V4 minimu
Installazione di u software
- Eseguite l'Explorer Electric Encoder™ file trovu nant'à u Netzer websitu: Encoder Explorer Software Tools
- Dopu a stallazione, vi vede l'icona di u software Electric Encoder Explorer nantu à u desktop di l'urdinatore.
- Cliccate nantu à l'icona di u software Electric Encoder Explorer per inizià.
Verificazione di a stallazione
Partendu l'Encoder Explorer
Assicuratevi di compie cù successu e seguenti attività:
- Muntatu Meccanicu
- Cunnessione Elettrica
- Cunnessione Encoder per a calibrazione
- Encoder Esplora l'installazione di u software
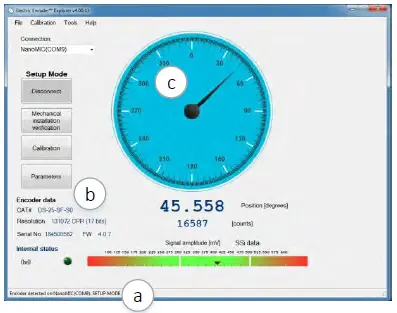
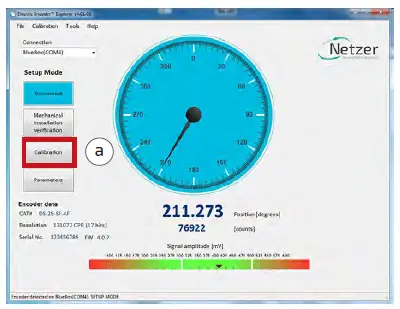
Eseguite u strumentu Electric Encoder Explorer (EEE)
Assicurà una cumunicazione curretta cù l'encoder: (modu di configurazione per difettu).
- A barra di statutu indica una cumunicazione successu.
- I dati di codificatore si mostranu in l'area di dati di codificatore. (CAT No., Serial No.)
- A visualizazione di u quadrante di pusizione risponde à a rotazione di l'arbre.
Eseguite a verificazione di muntatura è a selezzione di a direzzione di rotazione prima di calibrazione per assicurà un rendiment ottimale. Hè ancu cunsigliatu per osservà l'installazione à a finestra [Tools - Signal Analizer].Verificazione di l'installazione meccanica
A Verificazione di l'Installazione Meccanica furnisce una prucedura chì assicurerà un muntamentu meccanicu propiu raccogliendu dati crudi di i canali fini è grossi durante a rotazione. - Selezziunà [Verificazione di Montaggio Meccanica] nantu à u screnu principale.

- Selezziunà [Start] per inizià a cullizzioni di dati.
- Girate l'arbulu per cullà i dati di i canali fini è grossi.
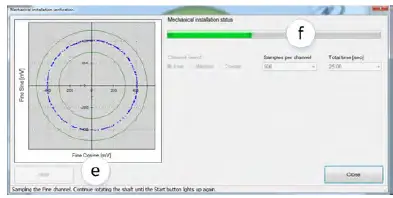
- À a fine di una verificazione successu, u SW mostrarà "Installazione Meccanica Corretta".
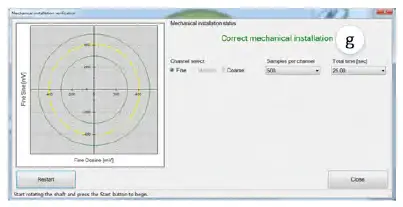
- Se u SW indica "Installazione Meccanica Incorretta", corregge a pusizione meccanica di u rotore, cum'è prisentatu in u paragrafu 3.3 - "Posizione Relativa di Rotor".

Calibrazione
Funzione nova
Opzione di calibrazione automatica attivata. Vede u documentu: Auto-calibration-feature-user-manual-V01
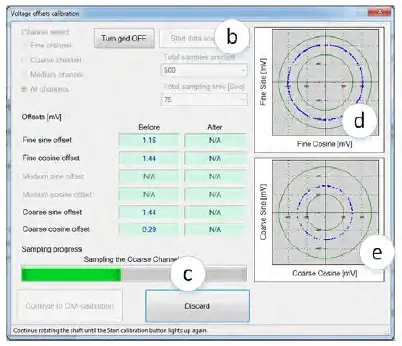
Calibrazione offset
Per un rendiment ottimali di l'Encoders Elettrici, l'inevitabbile offset DC di i signali sinus è cosenu deve esse compensatu nantu à u settore operativu.
Dopu avè finitu cù successu a prucedura di Verificazione di Montaggio:
- Selezziunà [Calibration] nant'à u screnu principale.
- Cumincià l'acquisizione di dati mentre rote u fustu. A barra di prugressu (c) indica u prugressu di a cullezzione. Girate l'asse in modu coerente durante a cullizzioni di dati, chì copre u settore di travagliu di l'applicazione da a fine à a fine, per automaticamente, a prucedura raccoglie 500 punti in 75 seconde. A velocità di rotazione ùn hè micca un paràmetru durante a cullizzioni di dati. L'indicazione di cullizzioni di dati mostra per i canali fini / grossi, un cerculu chjaru "magre" appare in u centru (d) (e) cù qualchì offset.
Offset compensé fine / Canal Corse 
calibrazione CAA
A seguente calibrazione allinea u canali grossu / fine raccogliendu dati da ogni puntu di i dui canali. Selezziunate [Cuntinuà à a calibrazione CAA] In a finestra di calibrazione di l'angolo CAA, selezziunate u buttone d'opzione pertinente da l'opzioni di intervallu di misurazione (a):
- Rotazione meccanica cumpleta - u muvimentu di l'arbre hè più di 10 gradi - cunsigliatu.
- Sezione limitata - definisce u funziunamentu di l'arbulu in un angolo limitatu definitu da gradi in casu di <10deg
- Libera sampling modes - definisce u numeru di punti calibration in u numeru tutali di punti in a casella testu. U sistema mostra u numeru di punti cunsigliatu per difettu. Cullate un minimu di nove punti nantu à u settore di travagliu.
- Cliccate u buttone [Start Calibration] (b)
- U statutu (c) indica a prossima operazione necessaria; u statu di u muvimentu di l'arburu; a pusizione attuale, è a prossima pusizione di destinazione à quale l'encoder deve esse rotatu.
- Girate l'arburu / codificatore à a pusizione successiva è cliccate u buttone [Cuntinuà] (c)
- l'arbulu deve esse in STAND STILL durante a cullizzioni di dati. Segui l'indicazione / l'interazzione durante u prucessu ciclicu per a pusizione di l'arburu -> stand still -> lettura di calculu.
- Repetite u passu sopra per tutti i punti definiti. finisce (d)
- Cliccate u buttone [Salvà è Cuntinuà] (e).
L'ultimu passu salva i paràmetri CAA di offsets, cumpiendu u prucessu di calibrazione.
Pone u puntu zero di l'encoder
A pusizione zero pò esse definita in ogni locu in u settore di travagliu. Rotate l'arburu à a pusizioni meccanica zero desiderata. Andate in u buttone "Calibrazione" in a barra di menu superiore, è appughjà "Set UZP". Selezziunate "Set Current Position" cum'è zero usendu l'opzione pertinente, è cliccate [Finish].
Test di jitter
Eseguite una prova di jitter per evaluà a qualità di a stallazione; a prova di jitter presenta e statistiche di lettura di lettura di posizione assoluta (conti) cù u tempu. U jitter cumunu deve esse +/- 3 cunti; Un jitter più altu pò indicà u rumore di u sistema.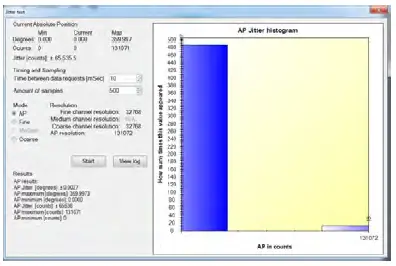
In casu chì i dati di lettura (punti blu) ùn sò micca distribuiti uniformemente nantu à un circhiu magre, pudete sperienze "rumore" in a vostra installazione (verificate a messa in terra di l'arburetu / stator).
Modu operativu
SSi/BiSS
Indicazione di u modu operativu di l'interfaccia SSi / BiSS Encoder dispunibile utilizendu NanoMIC. Per più infurmazione, leghje NanoMIC nantu à Netzer websitu U modu operativu presenta l'interfaccia "vera" SSi / BiSS cù a freccia di clock 1MHz.
Protocolu SSi
Protocolu BiSS

Disegni meccanichi

A moins qu'il ne soit précisé autrement
| E dimensioni sò in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ± 0.05 mm | 5-30: ± 0.1 mm |
| 31-120: ± 0.15 mm | 121-400: ± 0.2 mm |
DS-25 cù manica metallica di rotore


A moins qu'il ne soit précisé autrement
| E dimensioni sò in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ± 0.05 mm | 5-30: ± 0.1 mm |
| 31-120: ± 0.15 mm | 121-400: ± 0.2 mm |
Shaft - Installazione finale (passu)

A moins qu'il ne soit précisé autrement
| E dimensioni sò in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ± 0.05 mm | 5-30: ± 0.1 mm |
| 31-120: ± 0.15 mm | 121-400: ± 0.2 mm |
Nisuna Parte / Descrizzione / QTY
| 1 | DS-25 | Inclusu | Codificatore DS-25 | 1 | |
| 2 | EAPK004 | Inclusu | Kit 0-80" | 3 x encoder clamps nylon | 1 |
| 3 |
MA-DS25-004 |
Opcional |
Kit d'installazione di l'estremità di l'arburu |
Rondelle DIN125-A3.2 | 1 |
| 4 | Vite DIN 7984 M3x5 | 1 |
Dimensioni critiche marcate cù
ATTENZIONE
Ùn aduprate micca Loctite o altre colle chì cuntenenu Cyanoacrylate. Si consiglia l'uso di colla 3M - Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
Deep, Shaft - Installazione fine (passu)

A moins qu'il ne soit précisé autrement
- E dimensioni sò in: mm Finitura superficiale: N6
Tolleranze lineari
- 0.5-4.9: ± 0.05 mm 5-30: ± 0.1 mm
- 31-120: ± 0.15 mm 121-400: ± 0.2 mm
Nisuna Parte / Descrizzione / QTY
| 1 | DS-25 | Inclusu | Codificatore DS-25 | 1 | |
| 2 | EAPK005 | Opcional | Kit | 3 x M2 codificatore clamps | 1 |
| 3 |
MA-DS25-004 |
Opcional |
Kit d'installazione di l'estremità di l'arburu |
Rondelle DIN125-A3.2 | 1 |
| 4 | Vite DIN 7984 M3x5 | 1 |
Dimensioni critiche marcate cù "*"
ATTENZIONE
Ùn aduprate micca Loctite o altre colle chì cuntenenu Cyanoacrylate. Si consiglia l'uso di colla 3M - Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
Copyright © 2021 Netzer Precision Position Sensors ACS Ltd. Tutti i diritti riservati.
Documenti / Risorse
 |
Netzer DS-25 codificatore assoluto di risoluzione a 17 bit [pdfManuale d'usu Codificatore assolutu di risoluzione DS-25 17 bit, DS-25, codificatore assolutu di risoluzione 17 bit, codificatore assolutu di risoluzione, codificatore assolutu, codificatore |



