![]() คอร์ IO – CR-IO-16DI
คอร์ IO – CR-IO-16DI
คู่มือการใช้งาน
โมดูล I/O Modbus 16 จุด, DI 16 จุด
การแนะนำ
เกินview
ในการติดตั้งหลายๆ ครั้ง การมีฮาร์ดแวร์ที่คุ้มต้นทุน ทนทาน และเรียบง่ายกลายเป็นปัจจัยสำคัญในการชนะโครงการ กลุ่มผลิตภัณฑ์ Core นำเสนอโซลูชันที่สมบูรณ์แบบเพื่อตอบสนองเกณฑ์เหล่านี้ In ได้ร่วมมือกับ Atimus ซึ่งเป็นบริษัทที่มีประสบการณ์มากมายในสาขานี้ และมีความภูมิใจที่จะนำเสนอ Core IO!
16DI มีอินพุตดิจิทัล 16 ช่อง นอกจากจะตรวจสอบหน้าสัมผัสแบบไม่มีแรงดันไฟฟ้าแล้ว อุปกรณ์นี้ยังอนุญาตให้ใช้ตัวนับพัลส์ได้อีกด้วย
การสื่อสาร BEMS ขึ้นอยู่กับ Modbus RTU ที่แข็งแกร่งและได้รับการพิสูจน์แล้วบน RS485 หรือ Modbus TCP (รุ่น IP เท่านั้น)
การกำหนดค่าของอุปกรณ์สามารถทำได้ผ่านเครือข่ายโดยใช้ web อินเทอร์เฟซ (รุ่น IP เท่านั้น) หรือการลงทะเบียนการกำหนดค่า Modbus หรือโดยใช้อุปกรณ์ Android และเชื่อมต่อผ่าน Bluetooth โดยใช้แอพเฉพาะ
รุ่น Core IO นี้
ทั้งโมดูล CR-IO-16DI-RS และ CR-IO-16DI-IP มาพร้อมกับอินพุตดิจิตอล 8 ช่อง
CR-IO-16DI-RS มาพร้อมกับพอร์ต RS485 เท่านั้น ในขณะที่ CR-IO-16DI-IP มาพร้อมกับพอร์ต RS485 และ IP
ทั้งสองรุ่นยังมาพร้อมกับ Bluetooth บนบอร์ด ดังนั้นจึงสามารถกำหนดค่าได้โดยใช้ทั้งอุปกรณ์ Android และแอปเฉพาะ
รุ่น IP CR-IO-16DI-IP ยังรวม a web อินเทอร์เฟซการกำหนดค่าเซิร์ฟเวอร์ เข้าถึงได้ผ่าน PC web เบราว์เซอร์
ฮาร์ดแวร์
เกินview

สายไฟพาวเวอร์ซัพพลาย

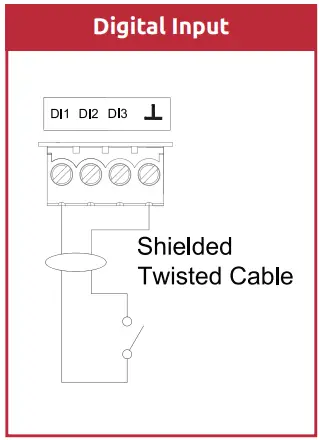
สายไฟอินพุตดิจิตอล (DI)
การเดินสายไฟเครือข่าย RS485
ลิงค์ที่เป็นประโยชน์ไปยังฐานความรู้ของเรา webเว็บไซต์:
วิธีการต่อสายเครือข่าย RS485
https://know.innon.com/howtowire-non-optoisolated
วิธียุติและอคติเครือข่าย RS485
https://know.innon.com/bias-termination-rs485-network
โปรดทราบ – ทั้งเวอร์ชัน IP และ RS สามารถใช้พอร์ต RS485 เพื่อตอบสนองต่อการสื่อสารหลัก Modbus แบบอนุกรมจาก BEMS แต่ทั้งสองเวอร์ชันไม่สามารถใช้พอร์ต RS485 เพื่อทำหน้าที่เป็นหลักหรือเกตเวย์ Modbus ได้

แผงไฟ LED ด้านหน้า
ไฟ LED ที่แผงด้านหน้าสามารถใช้เพื่อรับความคิดเห็นโดยตรงเกี่ยวกับสถานะของ I/O ของ Core IO และข้อมูลทั่วไปอื่นๆ
ด้านล่างนี้เป็นตารางที่จะช่วยถอดรหัสพฤติกรรม LED แต่ละประเภท
DI 1 ถึง 16
| โหมดอินพุตดิจิตอล | เงื่อนไข | สถานะ LED |
| โดยตรง | วงจรเปิด ไฟฟ้าลัดวงจร |
LED ดับ ไฟ LED |
| ย้อนกลับ | วงจรเปิด ไฟฟ้าลัดวงจร |
ไฟ LED LED ดับ |
| อินพุตพัลส์ | รับชีพจร | ไฟ LED จะกะพริบทุกครั้งที่มีพัลส์ |
BUS และ RUN
| นำ | เงื่อนไข | สถานะ LED |
| วิ่ง | Core IO ไม่เปิดใช้งาน Core IO ขับเคลื่อนอย่างถูกต้อง |
LED ดับ ไฟ LED |
| รสบัส | กำลังรับข้อมูล กำลังส่งข้อมูล ปัญหาขั้วบัส |
ไฟ LED กะพริบเป็นสีแดง ไฟ LED กะพริบเป็นสีน้ำเงิน ไฟ LED สีแดง |
กำหนดค่า I/O
อินพุตดิจิตอล
อินพุตดิจิทัลสามารถมีหน้าสัมผัสที่สะอาด/ไม่มีแรงดันไฟฟ้าซึ่งเชื่อมต่อกับ Core IO เพื่ออ่านสถานะเปิด/ปิด
อินพุตดิจิตอลแต่ละรายการสามารถกำหนดค่าเป็น:
- อินพุตดิจิตอลโดยตรง
- อินพุตดิจิตอลย้อนกลับ
- อินพุตพัลส์
ในขณะที่โหมด “ตรง” และ “ย้อนกลับ” จะส่งคืนสถานะ “เท็จ (0)” หรือ “จริง (1)” เมื่อหน้าสัมผัสเป็นแบบเปิดหรือปิด โหมดที่สาม “อินพุตพัลส์” ใช้เพื่อส่งคืนค่าตัวนับที่เพิ่มขึ้น 1 หน่วยทุกครั้งที่อินพุตดิจิทัลปิด โปรดอ่านส่วนด้านล่างเพื่อดูรายละเอียดเพิ่มเติมเกี่ยวกับการนับพัลส์
นับชีพจร
อินพุตดิจิตอลและเอาต์พุตสากลสามารถกำหนดค่าให้ทำงานเป็นอินพุตการนับพัลส์โดยเฉพาะได้
ความถี่สูงสุดที่อ่านได้ในการนับคือ 100Hz โดยมีรอบหน้าที่ 50% และความต้านทานสูงสุดที่อ่านได้จาก "การปิดการสัมผัส" คือ 50 โอห์ม
เมื่อมีการกำหนดค่าอินพุตให้นับพัลส์ Modbus Registers จำนวนหนึ่งจะพร้อมใช้งานพร้อมข้อมูลและคำสั่งเฉพาะสำหรับฟังก์ชันการนับพัลส์
ในความเป็นจริงแล้วอินพุตพัลส์จะนับรวม 2 ตัวดังนี้
- อันแรกเป็นแบบต่อเนื่อง มันจะเพิ่มขึ้นหนึ่งหน่วยสำหรับทุกพัลส์ที่ได้รับและจะนับต่อไปจนกว่าจะมีการส่งคำสั่งรีเซ็ตผ่าน Modbus
- ตัวนับรวมอื่น ๆ จะมีการจับเวลา โดยทั่วไปแล้ว ตัวนับรวมจะเพิ่มขึ้นหนึ่งหน่วยสำหรับทุกพัลส์ที่ได้รับ แต่จะนับเฉพาะเวลาที่กำหนด (ปรับได้) เท่านั้น (เป็นนาที) เมื่อเวลาหมดลง อินพุตการนับพัลส์แต่ละตัวจะมีรีจิสเตอร์ Modbus ต่อไปนี้ที่เชื่อมโยงกับตัวนับนั้น
- ตัวนับ (ตัวรวม): นี่คือตัวรวมหลัก ตัวนับจะกลับเป็น "0" เฉพาะในกรณีที่ส่งคำสั่งรีเซ็ต หรือหากปิดและเปิด Core IO ใหม่ คุณยังสามารถเขียนค่านี้เพื่อคืนค่าการนับก่อนหน้านี้ได้หากเปลี่ยนโมดูล หรือเพื่อรีเซ็ตเป็น 0
- ตัวนับ (ตัวจับเวลา): นี่คือตัวนับรวมตัวที่สอง ตัวจับเวลา ตัวนับจะกลับไปที่ "0" ทุกครั้งที่ตัวจับเวลาถึงค่าสูงสุดที่ตั้งไว้ (โดยมีการหน่วงเวลา 1 นาที) หรือเมื่อปิดและเปิด Core IO หากเปิดใช้งานการรีเซ็ตตัวนับ จำนวนนับภายในรอบจับเวลาจะถูกละเว้นและตัวจับเวลาตัวนับจะรีเซ็ตเป็น 0 การรีเซ็ตจะไม่รีเซ็ตจำนวนนี้กลับเป็น 0 หลังจากสิ้นสุดรอบจับเวลาและแสดงผลลัพธ์เป็นเวลา 1 นาที
- ตัวจับเวลาตัวนับ: จุดข้อมูลนี้จะส่งคืนเวลาปัจจุบันของตัวนับเป็นนาที โดยจะกลับเป็น "0" เมื่อถึงค่าสูงสุดที่ตั้งไว้
- ตัวนับเวลา: เมื่อใช้จุดข้อมูลนี้ คุณสามารถกำหนดค่าระยะเวลาของตัวนับเวลาสำหรับตัวรวมที่สอง (ค่าชุดสูงสุด) เป็นนาที ค่านี้จะถูกเก็บไว้ในหน่วยความจำ Core IO
- การรีเซ็ตตัวนับ: การใช้จุดข้อมูลนี้ คุณสามารถรีเซ็ตตัวนับผลรวมเป็นค่า "0" และตัวนับเวลาจะละทิ้งการนับจนถึงจุดนั้นในรอบเวลาและรีเซ็ตตัวจับเวลาเป็น 0 Core IO จะรีเซ็ตจุดข้อมูลนี้เองเป็นค่า "0" เมื่อดำเนินการคำสั่งแล้ว
การกำหนดค่าอุปกรณ์
การตั้งค่าคงที่
การสื่อสาร RS485 Modbus Slave มีการตั้งค่าบางอย่างที่ได้รับการแก้ไขดังต่อไปนี้
- ความยาวข้อมูล 8 บิต
- สต็อปบิต 1 อัน
- ความเท่าเทียมกันไม่มี
การตั้งค่าสวิตช์จุ่ม
สวิตช์ DIP ใช้เพื่อกำหนดการตั้งค่า RS485 อื่น ๆ และที่อยู่ทาสของ Modbus ดังนั้น -
- ตัวต้านทาน RS485 End-Of-Line (EOL)
- ตัวต้านทานอคติ RS485
- ที่อยู่ทาส Modbus
- RS485 อัตราบอด
สวิตช์ DIP สีน้ำเงิน EOL (End-Of-Line) สองตัวถูกกำหนดค่าดังนี้ –

โปรดตรวจสอบบทความฐานความรู้เฉพาะของเราที่ webเว็บไซต์ http://know.innon.com ซึ่งเราจะอธิบายโดยละเอียดเกี่ยวกับการใช้ตัวต้านทานการสิ้นสุดและตัวต้านทานอคติบนเครือข่าย RS485
Modbus ID และสวิตช์ DIP อัตราบอดมีการกำหนดค่าดังนี้ -

การตั้งค่าสวิตช์ DIP ที่อยู่สเลฟดำเนินต่อไป

แอพบลูทูธและ Android
Core IO มีบลูทูธในตัวซึ่งช่วยให้แอปการตั้งค่าหลักที่ทำงานบนอุปกรณ์ Android สามารถกำหนดการตั้งค่า IP และ I/O
โปรดดาวน์โหลดแอปจาก Google Play - ค้นหา "การตั้งค่าหลัก"
ดาวน์โหลดและติดตั้งแอพ จากนั้นตรวจสอบ/ทำการเปลี่ยนแปลงการตั้งค่าต่อไปนี้ –
- เปิดการตั้งค่าโทรศัพท์ของคุณ (ลากลงมาจากด้านบน กดไอคอน “ฟันเฟือง”)
- คลิกที่ “แอพ”
- เลือกแอป “การตั้งค่าหลัก”
- กด "สิทธิ์"
- กด “กล้อง” – ตั้งค่าเป็น “อนุญาตเฉพาะขณะใช้แอพ”
- ย้อนกลับไปแล้วกด “อุปกรณ์ใกล้เคียง” – ตั้งค่าเป็น “อนุญาต”
เมื่อคุณเปิดแอป กล้องจะเปิดขึ้น และคุณจะต้องใช้มันเพื่ออ่านรหัส QR บนโมดูลที่คุณต้องการตั้งค่า เช่น –

อุปกรณ์ Android จะขอให้คุณอนุญาตให้อุปกรณ์บลูทูธจับคู่ในการเชื่อมต่อครั้งแรก ระวังการแจ้งเตือนบนอุปกรณ์ของคุณและยอมรับ

เมื่อเชื่อมต่อแล้ว คุณจะเข้าสู่หน้าจอการตั้งค่า I/O ซึ่งคุณสามารถตั้งค่า I/O และอ่านค่ากระแสอินพุตและเอาต์พุตได้ –

ใช้ลูกศรแบบดรอปดาวน์ในคอลัมน์ “โหมด I/O” เพื่อเลือกประเภทอินพุตโดยคลิกที่ปุ่มตัวเลือกที่เกี่ยวข้อง
เมื่อคุณทำการเปลี่ยนแปลงหรือจำนวนการเปลี่ยนแปลง ปุ่ม "UPDATE" ที่ด้านล่างขวาจะเปลี่ยนจากสีเทาเป็นสีขาว กดปุ่มนี้เพื่อยืนยันการเปลี่ยนแปลงของคุณ
คลิกปุ่ม “ETHERNET” (ซ้ายล่าง) เพื่อตั้งค่า IP ที่จำเป็น
ตั้งค่าและยืนยันข้อมูลตามวิธี I/O ข้างต้น
คลิกปุ่ม “โหมด” (ซ้ายล่าง) เพื่อกลับไปยังการตั้งค่า I/O

พอร์ตอีเธอร์เน็ตและ Web การกำหนดค่าเซิร์ฟเวอร์ (รุ่น IP เท่านั้น)
สำหรับรุ่น IP ของ Core IO มีซ็อกเก็ต RJ45 มาตรฐานสำหรับ:
- การสื่อสาร Modbus TCP (ทาส)
- Web การเข้าถึงเซิร์ฟเวอร์เพื่อกำหนดค่าอุปกรณ์
โมเดล IP ยังคงให้การเข้าถึงพอร์ต RS485 สำหรับการสื่อสาร Modbus RTU (สเลฟ) บนโมเดลเหล่านี้ ดังนั้นผู้ใช้สามารถตัดสินใจได้ว่าจะใช้พอร์ตใดในการเชื่อมต่อ BEMS เข้ากับ Core IO
การตั้งค่าเริ่มต้นของพอร์ต IP คือ:
| ที่อยู่ IP: | 192.168.1.175 |
| ซับเน็ต: | 255.255.255.0 |
| ที่อยู่เกตเวย์: | 192.168.1.1 |
| พอร์ต Modbus TCP: | 502 (คงที่) |
| พอร์ต HTTP (webเซิร์ฟเวอร์): | 80 (คงที่) |
| Web ผู้ใช้เซิร์ฟเวอร์: | อะนิมัส (แก้ไขแล้ว) |
| Web รหัสผ่านเซิร์ฟเวอร์: | HD1881 (แก้ไขแล้ว) |
สามารถเปลี่ยนที่อยู่ IP, ซับเน็ต และที่อยู่เกตเวย์ได้จากแอพ Bluetooth Android หรือจาก web อินเทอร์เฟซเซิร์ฟเวอร์
การ web อินเทอร์เฟซของเซิร์ฟเวอร์มีลักษณะและทำงานในลักษณะเดียวกับแอปการตั้งค่าหลักที่อธิบายไว้ในส่วนก่อนหน้า
รายการจุด BEMS
Modbus ประเภทการลงทะเบียน
เว้นแต่จะระบุไว้เป็นอย่างอื่นในตาราง ค่า/สถานะและการตั้งค่าจุด I/O ทั้งหมดจะถูกเก็บไว้เป็นประเภทข้อมูล Holding Register Modbus และใช้การลงทะเบียนเดียว (16 บิต) เพื่อแสดงประเภทข้อมูลจำนวนเต็ม (Int, ช่วง 0 – 65535)
รีจิสเตอร์นับพัลส์เป็นรีจิสเตอร์ไม่มีเครื่องหมายที่มีความยาว 32 บิต กล่าวคือ รีจิสเตอร์ 16 บิต XNUMX ตัวติดต่อกันรวมกัน และลำดับไบต์จะถูกส่งในรูปแบบลิตเติ้ลเอนเดียน นั่นคือ –
- ไดรเวอร์ Niagara/Sedona Modbus – 1032
- Teltonika RTU xxx – 3412 – ใช้ 2 x “Register count/values” เพื่อรับ 32 บิตทั้งหมด
สำหรับอุปกรณ์ต้นแบบ Modbus บางตัว ที่อยู่การลงทะเบียนทศนิยมและฐานสิบหกในตารางจะต้องเพิ่มขึ้น 1 เพื่ออ่านการลงทะเบียนที่ถูกต้อง (เช่น Teltonika RTU xxx)
ชนิดข้อมูลบิตฟิลด์ใช้แต่ละบิตจาก 16 บิตที่มีอยู่ในการลงทะเบียน Modbus เพื่อให้ข้อมูลบูลีนหลายรายการโดยการอ่านหรือเขียนรีจิสเตอร์เดียว
ตารางการลงทะเบียน Modbus
คะแนนทั่วไป
| ทศนิยม | เลขฐานสิบหก | ชื่อ | รายละเอียด | เก็บไว้ | พิมพ์ | พิสัย |
| 3002 | บีบีเอ | เวอร์ชันเฟิร์มแวร์ – หน่วย | ตัวเลขที่สำคัญที่สุดสำหรับเวอร์ชันเฟิร์มแวร์ เช่น 2.xx | ใช่ | R | 0-9 |
| 3003 | บีบีบี | เวอร์ชันเฟิร์มแวร์ – ทศนิยมหนึ่งส่วน | ตัวเลขที่สำคัญที่สุดอันดับ 2 สำหรับเฟิร์มแวร์ เวอร์ชัน egx0x |
ใช่ | R | 0-9 |
| 3004 | บีบีซี | เวอร์ชั่นเฟิร์มแวร์ – ร้อยส่วน | ตัวเลขที่สำคัญที่สุดอันดับที่ 3 สำหรับเฟิร์มแวร์ เวอร์ชัน egxx4 |
ใช่ | R | 0-9 |
จุดอินพุตดิจิตอล
| ทศนิยม | เลขฐานสิบหก | ชื่อ | รายละเอียด | เก็บไว้ | พิมพ์ | พิสัย |
| 40 | 28 | โหมด DI 1 | เลือกโหมดอินพุตดิจิตอล: 0 = อินพุตดิจิตอลโดยตรง 1 = อินพุตดิจิตอลย้อนกลับ 2 = อินพุตพัลส์ |
ใช่ | อา/ว | 0…2 |
| 41 | 29 | โหมด DI 2 | ||||
| 42 | 2A | โหมด DI 3 | ||||
| 43 | 2B | โหมด DI 4 | ||||
| 44 | 2C | โหมด DI 5 | ||||
| 45 | 2D | โหมด DI 6 | ||||
| 46 | 2E | โหมด DI 7 | ||||
| 47 | 2F | โหมด DI 8 | ||||
| 48 | 30 | โหมด DI 9 | ||||
| 49 | 31 | โหมด DI 10 | ||||
| 50 | 32 | โหมด DI 11 | ||||
| 51 | 33 | โหมด DI 12 | ||||
| 52 | 34 | โหมด DI 13 | ||||
| 53 | 35 | โหมด DI 14 | ||||
| 54 | 36 | โหมด DI 15 | ||||
| 55 | 37 | โหมด DI 16 | ||||
| 1 | 1 | DI 1 | อ่านสถานะอินพุตดิจิตอล (โหมดอินพุตดิจิตอล): 0 = ไม่ทำงาน 1 = ใช้งานอยู่ |
เลขที่ | เลขที่ | 0…1 |
| 2 | 2 | DI 2 | ||||
| 3 | 3 | DI 3 | ||||
| 4 | 4 | DI 4 | ||||
| 5 | 5 | DI 5 | ||||
| 6 | 6 | DI 6 | ||||
| 7 | 7 | DI 7 | ||||
| 8 | 8 | DI 8 | ||||
| 9 | 9 | DI 9 | ||||
| 10 | A | DI 10 | ||||
| 11 | B | DI 11 | ||||
| 12 | C | DI 12 | ||||
| 13 | D | DI 13 | ||||
| 14 | E | DI 14 | ||||
| 15 | F | DI 15 | ||||
| 16 | 10 | DI 16 |
| 1111 | 457 | คดิ 1-16 | อ่านสถานะอินพุตดิจิทัลเป็นบิต (โหมดอินพุตดิจิทัลเท่านั้น บิต 0a DI1) | เลขที่ | R | 0…1 |
| 100 | 64 | ตัวนับ DI 1 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0.431496735 |
| 102 | 66 | เครื่องนับ D11 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0.4294967295 |
| 104 | 68 | DI 1 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อ “ตั้งเวลานับถอยหลัง” ถึงแล้วเริ่มใหม่อีกครั้ง |
เลขที่ | R | 0…14400 |
| 105 | 69 | DI 1 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | GM | 0…14400 |
| 106 | 6A | DI 1 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 107 | 6B | ตัวนับ DI 2 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0.429496735 |
| 109 | 6D | ตัวนับ DI 2 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาที่ทำงาน (โหมดอินพุตอ้วก) | เลขที่ | R | GA294967295 |
| 111 | 6 องศาฟาเรนไฮต์ | DI 2 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 112 | 70 | DI 2 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | GM | 0…14400 |
| 113 | 71 | DI 2 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 114 | 72 | ดีแอล 3 เคาน์เตอร์ (คนคุย) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0..4294967295 |
| 116 | 74 | ตัวนับ DI 3 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0..4294967295 |
| 118 | 76 | DI 3 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อ “ตั้งเวลานับถอยหลัง” ถึงแล้วเริ่มใหม่อีกครั้ง |
เลขที่ | R | 0…14400 |
| 119 | 77 | DI 3 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 120 | 78 | DI 3 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 121 | 79 | ตัวนับ DI 4 (ตัวนับรวม) | ความยาว 32 บิต ค่าตัวนับรวม (ตัวรวม) (โหมดอินพุตอ้วก) | เลขที่ | อา/ว | 0..4294967295 |
| 123 | 7B | ตัวนับ DI 4 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0.A2949672:05 |
| 125 | 7D | DI 4 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อ “ตั้งเวลานับได้แล้ว” ถึงแล้วเริ่มใหม่อีกครั้ง |
เลขที่ | R | 0…14400 |
| 126 | 7E | DI 4 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | ฟุต/วัตต์ | 0…14400 |
| 127 | 7 องศาฟาเรนไฮต์ | DI 4 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…111 |
| 128 | 80 | ตัวนับ DI 5 (ตัวนับรวม) | ความยาว 32 บิต ค่าตัวนับรวม (ตัวรวม) (โหมดอินพุตอ้วก) | เลขที่ | อา/ว | 0..4294967295 |
| 130 | 82 | ตัวนับ DI 5 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0..4294967295 |
| 132 | 84 | เครื่องจับเวลาส่วนลด | จับเวลาเป็นนาที จะรีเซ็ตเมื่อ “ตั้งเวลานับถอยหลัง” ถึงแล้วเริ่มใหม่อีกครั้ง |
เลขที่ | R | 0..14400 |
| 133 | 85 | DI 5 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 134 | 86 | รีเซ็ตตัวนับ Dl 5 | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 135 | 87 | ตัวนับ Dl 6 (ตัวรวม) | ความยาว 32 บิต ค่าตัวนับรวม (ตัวรวม) (โหมดอินพุตอ้วก) | เลขที่ | อา/ว | 0..4294967295 |
| 137 | 89 | ตัวนับ DI 6 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 139 | 8B | DI 6 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 140 | 8C | DI 6 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 141 | SD | DI 6 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 142 | 8E | ตัวนับ DI 7 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 144 | 90 | ตัวนับ DI 7 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (อินพุตพัลส์ โหมด) |
เลขที่ | R | 0…4294967295 |
| 146 | 92 | DI 7 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 147 | 93 | DI 7 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 148 | 94 | DI 7 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 149 | 95 | ตัวนับ DI 8 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 151 | 97 | ตัวนับ DI 8 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 153 | 99 | DI 8 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อ "ตั้งเวลาตัวนับ" ถึงแล้วเริ่มใหม่อีกครั้ง |
เลขที่ | R | 0…14400 |
| 154 | 9A | DI 8 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 155 | 9B | DI 8 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 156 | 9C | ตัวนับ DI 9 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 158 | 9E | ตัวนับ DI 9 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 160 | AO | DI 9 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 161 | Al | DI 9 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 162 | A2 | DI 9 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 163 | A3 | ตัวนับ DI 10 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 165 | AS | ตัวนับ DI 10 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 167 | A7 | DI 10 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 168 | A8 | DI 10 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 169 | A9 | DI 10 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 170 | AA | ตัวนับ DI 11 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 172 | AC | ตัวนับ DI 11 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 174 | AE | DI 11 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 175 | AF | 0111 ชุดตัวนับเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 176 | BO | DI 11 ตัวนับรีเซ็ต | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | เลขที่ | อา/ว | 0…1 |
| 177 | B1 | ตัวนับ DI 12 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 179 | 83 | ตัวนับ DI 12 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 181 | 95 | DI 12 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 182 | B6 | DI 12 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 183 | B7 | DI 12 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 184 | B8 | ตัวนับ DI 13 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 186 | BA | ตัวนับ DI 13 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 188 | BC | DI 13 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 189 | BD | DI 13 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 190 | BE | DI 13 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 191 | BF | ตัวนับ DI 14 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 193 | C1 | ตัวนับ DI 14 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 195 | C3 | DI 14 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 196 | C4 | DI 14 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 197 | CS | DI 14 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตเป็นค่าที่นับทั้งหมด (กลับไปที่ “O” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 198 | C6 | ตัวนับ DI 15 (ตัวนับรวม) | ค่าตัวนับรวมความยาว 32 บิต (ตัวรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 200 | C8 | ตัวนับ DI 15 (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 202 | CA | DI 15 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | R | 0…14400 |
| 203 | CB | DI 15 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 204 | CC | DI 15 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
| 205 | CD | ตัวนับ DI 16 (ตัวนับรวม) | ยาว 32 บิต ค่าตัวนับรวม (ตัวนับรวม) (โหมดอินพุตพัลส์) | เลขที่ | อา/ว | 0…4294967295 |
| 207 | CF | 01 16 ตัวนับ (ตัวจับเวลา) | ความยาว 32 บิต ค่าตัวนับสำหรับตัวจับเวลาการทำงาน (โหมดอินพุตพัลส์) | เลขที่ | R | 0…4294967295 |
| 209 | 1 | DI 16 ตัวนับเวลา | จับเวลาเป็นนาที จะรีเซ็ตเมื่อถึง "ตัวจับเวลาที่ตั้งไว้" และเริ่มต้นใหม่อีกครั้ง | เลขที่ | ft | 0…14400 |
| 210 | 2 | DI 16 ตัวนับตั้งเวลา | การกำหนดค่าระยะเวลาตัวจับเวลาเป็นนาที | ใช่ | อา/ว | 0…14400 |
| 211 | 3 | DI 16 ตัวนับรีเซ็ต | คำสั่งรีเซ็ตค่าที่นับทั้งหมด (กลับไปที่ “0” โดยอัตโนมัติ) |
เลขที่ | อา/ว | 0…1 |
ข้อมูลทางเทคนิค
ภาพวาด


ข้อมูลจำเพาะ
| แหล่งจ่ายไฟ | 24 Vac +10%/-15% 50 เฮิรตซ์, 24 Vdc +10%/-15% |
| กระแสไฟที่ใช้ — ต่ำสุด 70mA สูงสุด 80mA | |
| อินพุตดิจิตอล | 16 x อินพุตดิจิตอล (ไม่มีโวลต์) |
| DI ตรง, DI ย้อนกลับ, พัลส์ (สูงสุด 100 เฮิรตซ์, รอบหน้าที่ 50%, หน้าสัมผัสสูงสุด 50 โอห์ม) | |
| อินเทอร์เฟซสำหรับ BEMS | RS485, แยกออปโต, รองรับอุปกรณ์สูงสุด 63 เครื่องบนเครือข่าย |
| อีเธอร์เน็ต/IP (เวอร์ชัน IP) | |
| พิธีสารสู่ BEMS | Modbus RTU อัตราบอด 9600 – 230400 8 บิต ไม่มีความเท่าเทียมกัน 1 บิตหยุด |
| Modbus TCP (เวอร์ชัน IP) | |
| ระดับการป้องกันการรั่วซึม | IP20, EN 61326-1 |
| อุณหภูมิและ ความชื้น |
ขณะทำงาน: 0°C ถึง +50°C (32°F ถึง 122°F), สูงสุด 95% RH (ไม่มีการควบแน่น) |
| การเก็บรักษา: -25°C ถึง +75°C (-13°F ถึง 167°F), สูงสุด 95% RH (ไม่มีการควบแน่น) | |
| ตัวเชื่อมต่อ | ขั้วต่อปลั๊ก 1 x 2.5 mm2 |
| การติดตั้ง | ติดตั้งบนแผง (มีตัวยึดสกรูเลื่อนแบบออนบอร์ด 2 ตัวที่ด้านหลัง) / ติดตั้งบนราง DIN |
แนวทางการกำจัด
- ต้องทิ้งเครื่องใช้ไฟฟ้า (หรือผลิตภัณฑ์) แยกต่างหากตามกฎหมายว่าด้วยการกำจัดขยะในท้องถิ่นที่มีผลบังคับใช้
- ห้ามทิ้งผลิตภัณฑ์เป็นขยะชุมชน ต้องกำจัดผ่านศูนย์กำจัดขยะผู้เชี่ยวชาญ
- การใช้อย่างไม่เหมาะสมหรือการกำจัดผลิตภัณฑ์อย่างไม่ถูกต้องอาจส่งผลเสียต่อสุขภาพของมนุษย์และสิ่งแวดล้อม
- ในกรณีที่มีการกำจัดขยะไฟฟ้าและอิเล็กทรอนิกส์อย่างผิดกฎหมาย บทลงโทษจะถูกกำหนดโดยกฎหมายการกำจัดขยะในท้องถิ่น
1.0 4/10/2021
ขอความช่วยเหลือได้ที่ http://innon.com/support
เรียนรู้เพิ่มเติมได้ที่ http://know.innon.com
เอกสาร / แหล่งข้อมูล
 |
innon Core IO CR-IO-16DI 16 จุด Modbus อินพุตหรือเอาต์พุตโมดูล [พีดีเอฟ] คู่มือการใช้งาน Core IO CR-IO-16DI, โมดูลอินพุตหรือเอาต์พุต Modbus 16 จุด, Core IO CR-IO-16DI โมดูลอินพุตหรือเอาต์พุต Modbus 16 จุด, CR-IO-16DI, โมดูลอินพุตหรือเอาต์พุต |



