![]() Core IO – CR-IO-16DI
Core IO – CR-IO-16DI
ຄູ່ມືຜູ້ໃຊ້
16 ຈຸດ Modbus I/O Module, 16 DI
ແນະນຳ
ເກີນview
ໃນການຕິດຕັ້ງຈໍານວນຫຼາຍ, ມີຄ່າໃຊ້ຈ່າຍທີ່ມີປະສິດທິພາບ, ແຂງແຮງ, ແລະຮາດແວງ່າຍດາຍກາຍເປັນປັດໃຈສໍາຄັນໃນການຊະນະໂຄງການ. ເສັ້ນຫຼັກສະຫນອງການແກ້ໄຂທີ່ສົມບູນແບບເພື່ອຕອບສະຫນອງເງື່ອນໄຂເຫຼົ່ານີ້. In ໄດ້ຮ່ວມມືກັບ Atimus, ບໍລິສັດທີ່ມີປະສົບການທີ່ອຸດົມສົມບູນໃນພາກສະຫນາມ, ແລະມີຄວາມພູມໃຈທີ່ຈະນໍາສະເຫນີ Core IO!
16DI ສະຫນອງ 16 ວັດສະດຸປ້ອນດິຈິຕອນ. ເຊັ່ນດຽວກັນກັບການຕິດຕາມການຕິດຕໍ່ທີ່ບໍ່ມີ volt, ອຸປະກອນຍັງອະນຸຍາດໃຫ້ນໍາໃຊ້ຕົວຕ້ານການກໍາມະຈອນ.
ການສື່ສານ BEMS ແມ່ນອີງໃສ່ Modbus RTU ທີ່ເຂັ້ມແຂງແລະດີທີ່ພິສູດຫຼາຍກວ່າ RS485 ຫຼື Modbus TCP (ແບບ IP ເທົ່ານັ້ນ).
ການຕັ້ງຄ່າຂອງອຸປະກອນສາມາດເຮັດໄດ້ໂດຍຜ່ານເຄືອຂ່າຍໂດຍໃຊ້ບໍ່ວ່າຈະເປັນ web ອິນເຕີເຟດ (ສະບັບ IP ເທົ່ານັ້ນ) ຫຼືລົງທະບຽນການຕັ້ງຄ່າ Modbus, ຫຼືໂດຍການໃຊ້ອຸປະກອນ Android ແລະເຊື່ອມຕໍ່ຜ່ານ Bluetooth ໂດຍໃຊ້ແອັບຯທີ່ອຸທິດຕົນ.
ຮູບແບບ Core IO ນີ້
ທັງໂມດູນ CR-IO-16DI-RS ແລະ CR-IO-16DI-IP ມາພ້ອມກັບ 8 ວັດສະດຸປ້ອນດິຈິຕອນ.
CR-IO-16DI-RS ມາພ້ອມກັບພອດ RS485, ໃນຂະນະທີ່ CR-IO-16DI-IP ມາພ້ອມກັບພອດ RS485 ແລະ IP.
ທັງສອງລຸ້ນຍັງມາພ້ອມກັບ Bluetooth ຢູ່ເທິງເຮືອ, ສະນັ້ນການກຳນົດຄ່າສາມາດເຮັດໄດ້ໂດຍໃຊ້ອຸປະກອນ Android ແລະແອັບທີ່ອຸທິດຕົນ.
ຮູບແບບ IP CR-IO-16DI-IP ຍັງປະສົມປະສານ a web ການໂຕ້ຕອບການຕັ້ງຄ່າຂອງເຄື່ອງແມ່ຂ່າຍ, ສາມາດເຂົ້າເຖິງໂດຍຜ່ານ PC ໄດ້ web ຕົວທ່ອງເວັບ.
ຮາດແວ
ເກີນview

ສາຍໄຟສາຍໄຟ

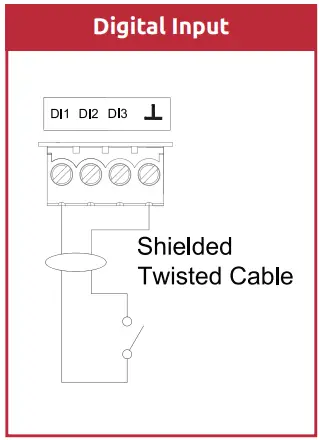
Wiring Digital Inputs (DI)
ສາຍໄຟເຄືອຂ່າຍ RS485
ບາງການເຊື່ອມຕໍ່ທີ່ເປັນປະໂຫຍດກັບພື້ນຖານຄວາມຮູ້ຂອງພວກເຮົາ webເວັບໄຊ:
ວິທີການສາຍເຄືອຂ່າຍ RS485
https://know.innon.com/howtowire-non-optoisolated
ວິທີການຢຸດແລະອະຄະຕິເຄືອຂ່າຍ RS485
https://know.innon.com/bias-termination-rs485-network
ກະລຸນາສັງເກດ – ທັງສອງລຸ້ນ IP ແລະ RS ສາມາດໃຊ້ພອດ RS485 ເພື່ອຕອບສະໜອງຕໍ່ serial Modbus master comms ຈາກ BEMS, ແຕ່ທັງສອງລຸ້ນສາມາດໃຊ້ພອດ RS485 ເພື່ອເຮັດໜ້າທີ່ເປັນ Modbus master ຫຼື gateway.

ແຜງ LED ດ້ານຫນ້າ
LEDs ໃນແຜງດ້ານຫນ້າສາມາດຖືກນໍາໃຊ້ເພື່ອຮັບຄໍາຄິດເຫັນໂດຍກົງກ່ຽວກັບສະຖານະຂອງ I/Os ຂອງ Core IO ແລະຂໍ້ມູນທົ່ວໄປເພີ່ມເຕີມ.
ຂ້າງລຸ່ມນີ້ແມ່ນຕາຕະລາງຈໍານວນຫນຶ່ງທີ່ຈະຊ່ວຍໃຫ້ການຖອດລະຫັດແຕ່ລະພຶດຕິກໍາ LED.
DI 1 ເຖິງ 16
| ຮູບແບບການປ້ອນຂໍ້ມູນດິຈິຕອນ | ເງື່ອນໄຂ | ສະຖານະພາບ LED |
| ໂດຍກົງ | ເປີດວົງຈອນ ວົງຈອນສັ້ນ |
ໄຟ LED ໄຟ LED |
| ປີ້ນກັບກັນ | ເປີດວົງຈອນ ວົງຈອນສັ້ນ |
ໄຟ LED ໄຟ LED |
| ການປ້ອນຂໍ້ມູນກໍາມະຈອນ | ໄດ້ຮັບກໍາມະຈອນ | ໄຟ LED ກະພິບເປີດສໍາລັບທຸກໆກໍາມະຈອນ |
BUS ແລະ RUN
| LED | ເງື່ອນໄຂ | ສະຖານະພາບ LED |
| ແລ່ນ | Core IO ບໍ່ໄດ້ຂັບເຄື່ອນ Core IO ຂັບເຄື່ອນຢ່າງຖືກຕ້ອງ |
ໄຟ LED ໄຟ LED |
| ລົດເມ | ຂໍ້ມູນທີ່ໄດ້ຮັບ ຂໍ້ມູນຖືກສົ່ງ ບັນຫາ polarity ລົດເມ |
LED ກະພິບສີແດງ LED ກະພິບສີຟ້າ LED ເທິງສີແດງ |
ຕັ້ງຄ່າ I/O
ການປ້ອນຂໍ້ມູນດິຈິຕອນ
ວັດສະດຸປ້ອນດິຈິຕອລສາມາດມີຕົວຕິດຕໍ່ທີ່ສະອາດ/ບໍ່ມີແຮງດັນທີ່ເຊື່ອມຕໍ່ກັບ Core IO ເພື່ອອ່ານສະຖານະເປີດ/ປິດຂອງມັນ.
ແຕ່ລະອິນພຸດດິຈິຕອລສາມາດຖືກຕັ້ງຄ່າໃຫ້ເປັນ:
- Digital Input ໂດຍກົງ
- ດິຈິຕອລ Input ປີ້ນກັບກັນ
- ການປ້ອນຂໍ້ມູນກໍາມະຈອນ
ໃນຂະນະທີ່ຮູບແບບ "ໂດຍກົງ" ແລະ "ປີ້ນກັບກັນ" ໂດຍພື້ນຖານແລ້ວຈະສົ່ງຄືນສະຖານະ "ບໍ່ຖືກຕ້ອງ (0)" ຫຼື "ຄວາມຈິງ (1)" ເມື່ອການຕິດຕໍ່ເປີດຫຼືປິດ, ໂຫມດທີສາມ "ການປ້ອນຂໍ້ມູນກໍາມະຈອນ" ຖືກນໍາໃຊ້ເພື່ອສົ່ງຄືນເຄື່ອງນັບ. ມູນຄ່າເພີ່ມຂຶ້ນ 1 ຫນ່ວຍທຸກຄັ້ງທີ່ວັດສະດຸປ້ອນດິຈິຕອນປິດ; ກະລຸນາອ່ານພາກສ່ວນຂ້າງລຸ່ມນີ້ສໍາລັບລາຍລະອຽດເພີ່ມເຕີມກ່ຽວກັບການນັບກໍາມະຈອນ.
ການນັບກຳມະຈອນ
ວັດສະດຸປ້ອນດິຈິຕອລ ແລະຜົນອອກທົ່ວໄປສາມາດກຳນົດຄ່າໄດ້ສະເພາະເພື່ອເຮັດວຽກເປັນວັດສະດຸປ້ອນການນັບກຳມະຈອນ.
ຄວາມຖີ່ຂອງການນັບສູງສຸດທີ່ສາມາດອ່ານໄດ້ແມ່ນ 100Hz, ມີຮອບວຽນຫນ້າທີ່ 50%, ແລະຄວາມຕ້ານທານສູງສຸດ "ຕິດຕໍ່ປິດ" ທີ່ສາມາດອ່ານໄດ້ແມ່ນ 50ohm.
ເມື່ອການປ້ອນຂໍ້ມູນຖືກຕັ້ງຄ່າເພື່ອນັບກໍາມະຈອນ, ຈໍານວນ Modbus Registers ແມ່ນມີຂໍ້ມູນ ແລະຄໍາສັ່ງສະເພາະສໍາລັບຟັງຊັນການນັບກໍາມະຈອນ.
ໃນຄວາມເປັນຈິງ, ການປ້ອນຂໍ້ມູນກໍາມະຈອນຈະນັບ 2 totalizers ດັ່ງຕໍ່ໄປນີ້ -
- ທໍາອິດແມ່ນຢ່າງຕໍ່ເນື່ອງ; ມັນຈະເພີ່ມຂຶ້ນຫນຶ່ງຫນ່ວຍສໍາລັບທຸກໆກໍາມະຈອນທີ່ໄດ້ຮັບແລະຈະສືບຕໍ່ນັບຈົນກ່ວາຄໍາສັ່ງ reset ຖືກສົ່ງຜ່ານ Modbus.
- ເຄື່ອງໝາຍລວມອື່ນໝົດເວລາແລ້ວ. ໂດຍພື້ນຖານແລ້ວ, ມັນຍັງຈະເພີ່ມຂຶ້ນຫນຶ່ງຫນ່ວຍສໍາລັບທຸກໆກໍາມະຈອນທີ່ໄດ້ຮັບແຕ່ຈະນັບພຽງແຕ່ສໍາລັບເວລາທີ່ກໍານົດ (ປັບໄດ້) (ໃນນາທີ). ເມື່ອເວລາຫມົດອາຍຸ, ແຕ່ລະການປ້ອນຂໍ້ມູນການນັບກໍາມະຈອນມີທະບຽນ Modbus ຕໍ່ໄປນີ້ທີ່ກ່ຽວຂ້ອງກັບມັນ -
- counter (totalizer): ນີ້ແມ່ນຕົວລວມຕົ້ນຕໍ. ມັນຈະກັບຄືນໄປຫາ "0" ພຽງແຕ່ຖ້າຄໍາສັ່ງປັບຄ່າຖືກສົ່ງ, ຫຼືຖ້າ Core IO ຖືກວົງຈອນພະລັງງານ - ທ່ານຍັງສາມາດຂຽນໃສ່ຄ່ານີ້ເພື່ອຟື້ນຟູການນັບກ່ອນຫນ້າຖ້າປ່ຽນໂມດູນຫຼືປ່ຽນເປັນ 0.
- counter (ຈັບເວລາ): ນີ້ແມ່ນ totalizer ຄັ້ງທີສອງ, ການກໍານົດເວລາຫນຶ່ງ. ມັນຈະກັບຄືນໄປຫາ “0” ທຸກໆຄັ້ງທີ່ເຄື່ອງຈັບເວລາຮອດຄ່າສູງສຸດທີ່ກຳນົດໄວ້ (ມີຄວາມລ່າຊ້າ 1 ນາທີ), ຫຼືຖ້າ Core IO ໝູນໃຊ້ພະລັງງານ. ຖ້າການຣີເຊັດໂຕນັບຖືກເປີດໃຊ້ງານ, ການນັບພາຍໃນຮອບເວລາຈະຖືກລະເລີຍ ແລະໂມງນັບຖອຍຫຼັງຣີເຊັດເປັນ 0. ການຣີເຊັດຈະບໍ່ຣີເຊັດການນັບນີ້ເປັນ 0 ຫຼັງຈາກທີ່ມັນໝົດຮອບເວລາແລ້ວ ແລະກຳລັງສະແດງຜົນເປັນເວລາ 1 ນາທີ.
- counter timer: ຈຸດຂໍ້ມູນນີ້ສົ່ງຄືນເວລາປະຈຸບັນຂອງຕົວນັບ, ເປັນນາທີ. ມັນແນ່ນອນຈະກັບຄືນໄປຫາ "0" ເມື່ອມັນຮອດມູນຄ່າທີ່ກໍານົດໄວ້ສູງສຸດ
- ຕົວຈັບເວລາຈັບເວລາ: ການນໍາໃຊ້ຈຸດຂໍ້ມູນນີ້ທ່ານສາມາດກໍານົດໄລຍະເວລາຂອງຕົວຈັບເວລາສໍາລັບຕົວຈັບເວລາທີສອງ (ຄ່າສູງສຸດທີ່ກໍານົດໄວ້), ເປັນນາທີ. ຄ່ານີ້ຖືກເກັບໄວ້ພາຍໃນຫນ່ວຍຄວາມຈໍາ Core IO
- counter reset: ການນໍາໃຊ້ຈຸດຂໍ້ມູນນີ້ທ່ານສາມາດປັບຕົວນັບລວມສູນເປັນຄ່າ “0” ແລະເຄື່ອງນັບເວລາຈະຍົກເລີກການນັບເຖິງຈຸດນັ້ນໃນຮອບເວລາ ແລະຕັ້ງໂມງຈັບເວລາເປັນ 0. Core IO ຈະຣີເຊັດຂໍ້ມູນນີ້ເອງທີ່ຊີ້ໄປ. ຄ່າ “0” ເມື່ອຄໍາສັ່ງຖືກປະຕິບັດ
ການຕັ້ງຄ່າອຸປະກອນ
ແກ້ໄຂການຕັ້ງຄ່າ
ການສື່ສານຂອງ RS485 Modbus Slave ມີການຕັ້ງຄ່າບາງຢ່າງທີ່ຖືກແກ້ໄຂດັ່ງຕໍ່ໄປນີ້ -
- ຄວາມຍາວຂໍ້ມູນ 8-bit
- 1 ຢຸດ bit
- Parity NONE
ການຕັ້ງຄ່າ DIP Switch
ສະວິດ DIP ຖືກນໍາໃຊ້ເພື່ອກໍານົດການຕັ້ງຄ່າ RS485 ອື່ນໆແລະທີ່ຢູ່ສໍາລອງ Modbus ດັ່ງນັ້ນ -
- ຕົວຕ້ານທານ RS485 End-Of-Line (EOL).
- ຕົວຕ້ານທານອະຄະຕິ RS485
- Modbus Slave ທີ່ຢູ່
- RS485 Baud-Rate
ທະນາຄານຂອງສອງປຸ່ມ EOL (End-Of-Line) ສີຟ້າ DIP ໄດ້ຖືກຕັ້ງຄ່າດັ່ງຕໍ່ໄປນີ້ -

ກະລຸນາກວດສອບບົດຄວາມພື້ນຖານຄວາມຮູ້ທີ່ອຸທິດຕົນຂອງພວກເຮົາທີ່ມີຢູ່ໃນ webເວັບໄຊ http://know.innon.com ບ່ອນທີ່ພວກເຮົາອະທິບາຍຢ່າງລະອຽດກ່ຽວກັບການນໍາໃຊ້ເຄື່ອງຕ້ານການຢຸດແລະອະຄະຕິໃນເຄືອຂ່າຍ RS485.
Modbus ID ແລະ baud rate DIP switches ແມ່ນ configured ດັ່ງນີ້ –

Slave address DIP ສືບຕໍ່ການຕັ້ງຄ່າສະວິດ.

ແອັບ Bluetooth ແລະ Android
Core IO ມີ Bluetooth ໃນຕົວທີ່ອະນຸຍາດໃຫ້ແອັບຯການຕັ້ງຄ່າຫຼັກທີ່ເຮັດວຽກຢູ່ໃນອຸປະກອນ Android ເພື່ອຕັ້ງຄ່າການຕັ້ງຄ່າ IP ແລະ I/O.
ກະລຸນາດາວໂຫຼດແອັບຈາກ Google Play – ຊອກຫາ “ການຕັ້ງຄ່າຫຼັກ”
ດາວນ໌ໂຫລດແລະຕິດຕັ້ງ app ໄດ້, ຫຼັງຈາກນັ້ນກວດສອບ / ເຮັດໃຫ້ການປ່ຽນແປງການຕັ້ງຄ່າດັ່ງຕໍ່ໄປນີ້ -
- ເປີດການຕັ້ງຄ່າໂທລະສັບຂອງທ່ານ (ລາກລົງຈາກທາງເທິງ, ກົດໄອຄອນ "cog")
- ໃຫ້ຄລິກໃສ່ "Apps"
- ເລືອກແອັບ “ການຕັ້ງຄ່າຫຼັກ”
- ກົດ "ການອະນຸຍາດ"
- ກົດ “ກ້ອງຖ່າຍຮູບ” – ຕັ້ງມັນເປັນ “ອະນຸຍາດໃຫ້ພຽງແຕ່ໃນຂະນະທີ່ການນໍາໃຊ້ app”
- ກັບໄປຈາກນັ້ນກົດ “ອຸປະກອນໃກ້ຄຽງ” – ຕັ້ງມັນເປັນ “ອະນຸຍາດ”
ເມື່ອທ່ານເປີດໃຊ້ແອັບ, ກ້ອງຖ່າຍຮູບຈະເປີດ, ແລະທ່ານຈະຕ້ອງໃຊ້ມັນເພື່ອອ່ານລະຫັດ QR ໃນໂມດູນ, ທ່ານຕ້ອງການຕັ້ງ, ເຊັ່ນ: -

ອຸປະກອນ Android ຈະຮ້ອງຂໍໃຫ້ທ່ານອະນຸຍາດໃຫ້ອຸປະກອນ Bluetooth ຈັບຄູ່ໃນການເຊື່ອມຕໍ່ຄັ້ງທໍາອິດ, ລະວັງການແຈ້ງເຕືອນໃນອຸປະກອນຂອງທ່ານແລະຍອມຮັບພວກມັນ.

ເມື່ອເຊື່ອມຕໍ່ແລ້ວ, ທ່ານຈະລົງທີ່ຫນ້າຈໍການຕັ້ງຄ່າ I/O, ບ່ອນທີ່ທ່ານສາມາດຕັ້ງ I/O ແລະອ່ານການປ້ອນຂໍ້ມູນແລະຜົນຜະລິດໃນປັດຈຸບັນ -

ໃຊ້ລູກສອນແບບເລື່ອນລົງໃນຖັນ “I/O Mode” ເພື່ອເລືອກປະເພດການປ້ອນຂໍ້ມູນໂດຍການຄລິກໃສ່ປຸ່ມວິທະຍຸທີ່ກ່ຽວຂ້ອງ –
ເມື່ອທ່ານເຮັດການປ່ຽນແປງຫຼືຈໍານວນການປ່ຽນແປງ, ປຸ່ມ "UPDATE" ຢູ່ເບື້ອງຂວາລຸ່ມຈະປ່ຽນຈາກສີຂີ້ເຖົ່າໄປເປັນສີຂາວ; ກົດນີ້ເພື່ອເຮັດການປ່ຽນແປງຂອງທ່ານ.
ໃຫ້ຄລິກໃສ່ປຸ່ມ "ETHERNET" (ຊ້າຍລຸ່ມ) ເພື່ອຕັ້ງຄ່າການຕັ້ງຄ່າ IP ທີ່ຕ້ອງການ.
ກໍານົດແລະປະຕິບັດຂໍ້ມູນຕາມວິທີການ I/O ຂ້າງເທິງ.
ຄລິກທີ່ປຸ່ມ “MODE” (ຊ້າຍລຸ່ມ) ເພື່ອກັບຄືນໄປຫາການຕັ້ງຄ່າ I/O.

Ethernet Port ແລະ Web ການຕັ້ງຄ່າເຊີບເວີ (ລຸ້ນ IP ເທົ່ານັ້ນ)
ສໍາລັບແບບຈໍາລອງ IP ຂອງ Core IO, ເຕົ້າຮັບ RJ45 ມາດຕະຖານແມ່ນມີໃຫ້ໃຊ້ສໍາລັບ:
- ການສື່ສານ Modbus TCP (ສໍາລອງ).
- Web ການເຂົ້າເຖິງເຄື່ອງແມ່ຂ່າຍເພື່ອກໍາຫນົດຄ່າອຸປະກອນ
ຮູບແບບ IP ຍັງຄົງໃຫ້ການເຂົ້າເຖິງພອດ RS485 ສໍາລັບການສື່ສານ Modbus RTU (ສໍາລອງ) ໃນແບບຈໍາລອງເຫຼົ່ານີ້, ດັ່ງນັ້ນຜູ້ໃຊ້ສາມາດຕັດສິນໃຈວ່າຈະໃຊ້ອັນໃດເພື່ອເຊື່ອມຕໍ່ BEMS ກັບ Core IO.
ການຕັ້ງຄ່າເລີ່ມຕົ້ນຂອງພອດ IP ແມ່ນ:
| ທີ່ຢູ່ IP: | 192.168.1.175 |
| ເຄືອຂ່າຍຍ່ອຍ: | 255.255.255.0 |
| ທີ່ຢູ່ປະຕູ: | 192.168.1.1 |
| Modbus TCP ພອດ: | 502 (ແກ້ໄຂ) |
| ຜອດ HTTP (webເຊີບເວີ): | 80 (ແກ້ໄຂ) |
| Web ຜູ້ໃຊ້ເຊີບເວີ: | ສັດ (ຄົງທີ່) |
| Web ລະຫັດຜ່ານເຊີບເວີ: | HD1881 (ຄົງທີ່) |
ທີ່ຢູ່ IP, ເຄືອຂ່າຍຍ່ອຍ, ແລະທີ່ຢູ່ປະຕູສາມາດຖືກປ່ຽນຈາກແອັບຯ Bluetooth Android ຫຼືຈາກ web ການໂຕ້ຕອບຂອງເຄື່ອງແມ່ຂ່າຍ.
ໄດ້ web ການໂຕ້ຕອບຂອງເຊີບເວີເບິ່ງແລະເຮັດວຽກໃນຫຼາຍວິທີດຽວກັນກັບແອັບຯການຕັ້ງຄ່າຫຼັກທີ່ອະທິບາຍໄວ້ໃນພາກກ່ອນຫນ້າ.
ລາຍຊື່ຈຸດ BEMS
ປະເພດການລົງທະບຽນ Modbus
ເວັ້ນເສຍແຕ່ໄດ້ລະບຸໄວ້ເປັນຢ່າງອື່ນໃນຕາຕະລາງ, ຄ່າ/ສະຖານະ ແລະການຕັ້ງຄ່າຈຸດ I/O ທັງໝົດແມ່ນຖືເປັນປະເພດຂໍ້ມູນ Holding Register Modbus ແລະໃຊ້ການລົງທະບຽນດຽວ (16 bit) ເພື່ອສະແດງຂໍ້ມູນປະເພດ Integer (Int, range 0 – 65535).
ການລົງທະບຽນ Pulse count ແມ່ນຍາວ 32-bit, unsigned registers, i.e. ສອງທະບຽນ 16-bit ຕິດຕໍ່ກັນລວມກັນ, ແລະຄໍາສັ່ງ byte ຂອງພວກມັນຖືກສົ່ງເປັນ endian ນ້ອຍ, ie -
- ຄົນຂັບ Niagara/Sedona Modbus – 1032
- Teltonika RTU xxx – 3412 – ຍັງໃຊ້ 2 x “ລົງທະບຽນນັບ/ຄ່າ” ເພື່ອໃຫ້ໄດ້ທັງໝົດ 32 bits
ສໍາລັບບາງອຸປະກອນແມ່ບົດ Modbus, ທີ່ຢູ່ລົງທະບຽນເລກຖານສິບແລະ hex ໃນຕາຕະລາງຈະຕ້ອງໄດ້ເພີ່ມຂຶ້ນໂດຍ 1 ເພື່ອອ່ານການລົງທະບຽນທີ່ຖືກຕ້ອງ (ເຊັ່ນ: Teltonika RTU xxx)
ປະເພດຂໍ້ມູນ bit-field ໃຊ້ບິດສ່ວນບຸກຄົນຈາກ 16 bits ທີ່ມີຢູ່ໃນທະບຽນ Modbus ເພື່ອໃຫ້ຂໍ້ມູນ Boolean ຫຼາຍໂດຍການອ່ານຫຼືຂຽນທະບຽນດຽວ.
ຕາຕະລາງລົງທະບຽນ Modbus
ຄະແນນທົ່ວໄປ
| ທົດສະນິຍົມ | Hex | ຊື່ | ລາຍລະອຽດ | ເກັບຮັກສາໄວ້ | ປະເພດ | ຊ່ວງ |
| 3002 | BBA | ລຸ້ນເຟີມແວ – ໜ່ວຍ | ຕົວເລກທີ່ສໍາຄັນທີ່ສຸດສໍາລັບສະບັບເຟີມແວເຊັ່ນ 2.xx | ແມ່ນແລ້ວ | R | 0-9 |
| 3003 | ບີບີ | ລຸ້ນເຟີມແວ – ສ່ວນສິບ | ອັນດັບທີ 2 ທີ່ສຳຄັນທີ່ສຸດສຳລັບເຟີມແວ ຮຸ່ນ egx0x |
ແມ່ນແລ້ວ | R | 0-9 |
| 3004 | BBC | ເວີຊັ່ນເຟີມແວ – ຮ້ອຍສ່ວນຮ້ອຍ | ອັນດັບທີ 3 ທີ່ສຳຄັນທີ່ສຸດສຳລັບເຟີມແວ ລຸ້ນ egxx4 |
ແມ່ນແລ້ວ | R | 0-9 |
ຈຸດປ້ອນຂໍ້ມູນດິຈິຕອນ
| ທົດສະນິຍົມ | Hex | ຊື່ | ລາຍລະອຽດ | ເກັບຮັກສາໄວ້ | ປະເພດ | ຊ່ວງ |
| 40 | 28 | DI 1 ໂໝດ | ຮູບແບບການປ້ອນຂໍ້ມູນດິຈິຕອນເລືອກ: 0 = Digital Input ໂດຍກົງ 1 = Digital Input ປີ້ນກັບກັນ 2 = ການປ້ອນຂໍ້ມູນກໍາມະຈອນ |
ແມ່ນແລ້ວ | R/W | 0…2 |
| 41 | 29 | DI 2 ໂໝດ | ||||
| 42 | 2A | DI 3 ໂໝດ | ||||
| 43 | 2B | DI 4 ໂໝດ | ||||
| 44 | 2C | DI 5 ໂໝດ | ||||
| 45 | 2D | DI 6 ໂໝດ | ||||
| 46 | 2E | DI 7 ໂໝດ | ||||
| 47 | 2F | DI 8 ໂໝດ | ||||
| 48 | 30 | DI 9 ໂໝດ | ||||
| 49 | 31 | DI 10 ໂໝດ | ||||
| 50 | 32 | DI 11 ໂໝດ | ||||
| 51 | 33 | DI 12 ໂໝດ | ||||
| 52 | 34 | DI 13 ໂໝດ | ||||
| 53 | 35 | DI 14 ໂໝດ | ||||
| 54 | 36 | DI 15 ໂໝດ | ||||
| 55 | 37 | DI 16 ໂໝດ | ||||
| 1 | 1 | ໄອດີ 1 | ອ່ານສະຖານະ Digital Input (ຮູບແບບການປ້ອນຂໍ້ມູນດິຈິຕອນ): 0 = ບໍ່ເຄື່ອນໄຫວ 1 = ເຄື່ອນໄຫວ |
ບໍ່ | ບໍ່ | 0…1 |
| 2 | 2 | ໄອດີ 2 | ||||
| 3 | 3 | ໄອດີ 3 | ||||
| 4 | 4 | ໄອດີ 4 | ||||
| 5 | 5 | ໄອດີ 5 | ||||
| 6 | 6 | ໄອດີ 6 | ||||
| 7 | 7 | ໄອດີ 7 | ||||
| 8 | 8 | ໄອດີ 8 | ||||
| 9 | 9 | ໄອດີ 9 | ||||
| 10 | A | ໄອດີ 10 | ||||
| 11 | B | ໄອດີ 11 | ||||
| 12 | C | ໄອດີ 12 | ||||
| 13 | D | ໄອດີ 13 | ||||
| 14 | E | ໄອດີ 14 | ||||
| 15 | F | ໄອດີ 15 | ||||
| 16 | 10 | ໄອດີ 16 |
| 1111 | 457 | DI 1-16 | ອ່ານສະຖານະພາບການປ້ອນຂໍ້ມູນດິຈິຕອນເປັນ bit (ພຽງແຕ່ຮູບແບບການປ້ອນຂໍ້ມູນດິຈິຕອນ, bit 0 a. DI1) | ບໍ່ | R | 0…1 |
| 100 | 64 | ຕົວນັບ DI 1 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0.431496735 |
| 102 | 66 | ຕົວນັບ D11 (ຈັບເວລາ) | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0.4294967295 |
| 104 | 68 | ເຄື່ອງຈັບເວລາ DI 1 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຕັ້ງໂມງນັບຖອຍຫຼັງ” ບັນລຸແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງ |
ບໍ່ | R | 0…14400 |
| 105 | 69 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 1 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | GM | 0…14400 |
| 106 | 6A | DI 1 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 107 | 6B | ຕົວນັບ DI 2 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0.429496735 |
| 109 | 6D | ເຄື່ອງນັບເວລາ DI 2 | ຍາວ 32-ບິດ, ຄ່ານັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນ puke) | ບໍ່ | R | GA294967295 |
| 111 | 6 F | ເຄື່ອງຈັບເວລາ DI 2 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 112 | 70 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 2 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | GM | 0…14400 |
| 113 | 71 | DI 2 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 114 | 72 | DL 3 counter (talker) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0..4294967295 |
| 116 | 74 | ເຄື່ອງນັບເວລາ DI 3 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0..4294967295 |
| 118 | 76 | ເຄື່ອງຈັບເວລາ DI 3 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຕັ້ງໂມງນັບຖອຍຫຼັງ” ບັນລຸແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງ |
ບໍ່ | R | 0…14400 |
| 119 | 77 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 3 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 120 | 78 | DI 3 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 121 | 79 | ຕົວນັບ DI 4 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນ puke) | ບໍ່ | R/W | 0..4294967295 |
| 123 | 7B | ເຄື່ອງນັບເວລາ DI 4 | ຍາວ 32 ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0.A2949672:05 |
| 125 | 7D | ເຄື່ອງຈັບເວລາ DI 4 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຕັ້ງໂມງນັບຖອຍຫຼັງ” ບັນລຸແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງ |
ບໍ່ | R | 0…14400 |
| 126 | 7E | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 4 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | ຟຸດ/ວ | 0…14400 |
| 127 | 7 F | DI 4 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…111 |
| 128 | 80 | ຕົວນັບ DI 5 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນ puke) | ບໍ່ | R/W | 0..4294967295 |
| 130 | 82 | ເຄື່ອງນັບເວລາ DI 5 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0..4294967295 |
| 132 | 84 | ຈັບເວລາສ່ວນຫຼຸດ | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຕັ້ງໂມງນັບຖອຍຫຼັງ” ບັນລຸແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງ |
ບໍ່ | R | 0..14400 |
| 133 | 85 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 5 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 134 | 86 | dl 5 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 135 | 87 | ຕົວນັບ DL 6 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນ puke) | ບໍ່ | R/W | 0..4294967295 |
| 137 | 89 | ເຄື່ອງນັບເວລາ DI 6 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 139 | 8B | ເຄື່ອງຈັບເວລາ DI 6 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 140 | 8C | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 6 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 141 | SD | DI 6 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 142 | 8E | ຕົວນັບ DI 7 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 144 | 90 | ເຄື່ອງນັບເວລາ DI 7 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ການປ້ອນຂໍ້ມູນກໍາມະຈອນ ໂໝດ) |
ບໍ່ | R | 0…4294967295 |
| 146 | 92 | ເຄື່ອງຈັບເວລາ DI 7 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 147 | 93 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 7 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 148 | 94 | DI 7 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 149 | 95 | ຕົວນັບ DI 8 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 151 | 97 | ເຄື່ອງນັບເວລາ DI 8 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 153 | 99 | ເຄື່ອງຈັບເວລາ DI 8 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ 'ໂຕນັບເວລາຕັ້ງແລ້ວ' ບັນລຸແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງ |
ບໍ່ | R | 0…14400 |
| 154 | 9A | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 8 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 155 | 9B | DI 8 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 156 | 9C | ຕົວນັບ DI 9 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 158 | 9E | ເຄື່ອງນັບເວລາ DI 9 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 160 | AO | ເຄື່ອງຈັບເວລາ DI 9 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 161 | Al | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 9 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 162 | A2 | DI 9 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 163 | A3 | ຕົວນັບ DI 10 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 165 | AS | ເຄື່ອງນັບເວລາ DI 10 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 167 | A7 | ເຄື່ອງຈັບເວລາ DI 10 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 168 | A8 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 10 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 169 | A9 | DI 10 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 170 | AA | ຕົວນັບ DI 11 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 172 | AC | ເຄື່ອງນັບເວລາ DI 11 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 174 | AE | ເຄື່ອງຈັບເວລາ DI 11 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 175 | AF | ຕັ້ງໂມງນັບຖອຍຫຼັງ 0111 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 176 | BO | DI 11 counter reset | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ບໍ່ | R/W | 0…1 |
| 177 | B1 | ຕົວນັບ DI 12 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 179 | 83 | ເຄື່ອງນັບເວລາ DI 12 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 181 | 95 | ເຄື່ອງຈັບເວລາ DI 12 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 182 | B6 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 12 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 183 | B7 | DI 12 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 184 | B8 | ຕົວນັບ DI 13 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 186 | BA | ເຄື່ອງນັບເວລາ DI 13 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 188 | BC | ເຄື່ອງຈັບເວລາ DI 13 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 189 | BD | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 13 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 190 | BE | DI 13 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 191 | BF | ຕົວນັບ DI 14 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 193 | C1 | ເຄື່ອງນັບເວລາ DI 14 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 195 | C3 | ເຄື່ອງຈັບເວລາ DI 14 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 196 | C4 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 14 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 197 | CS | DI 14 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “O” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 198 | C6 | ຕົວນັບ DI 15 (ຕົວນັບລວມ) | ຄວາມຍາວ 32-ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 200 | C8 | ເຄື່ອງນັບເວລາ DI 15 | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 202 | CA | ເຄື່ອງຈັບເວລາ DI 15 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | R | 0…14400 |
| 203 | CB | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 15 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 204 | CC | DI 15 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
| 205 | CD | ຕົວນັບ DI 16 (ຕົວນັບລວມ) | ຄວາມຍາວ 32 ບິດ, ມູນຄ່າໂຕນັບທັງໝົດ (Totalizer) (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R/W | 0…4294967295 |
| 207 | CF | 01 16 ໂມງນັບຖອຍຫຼັງ | ຄວາມຍາວ 32-ບິດ, ຄ່າຕົວນັບສໍາລັບເຄື່ອງຈັບເວລາແລ່ນ (ຮູບແບບການປ້ອນຂໍ້ມູນກໍາມະຈອນ) | ບໍ່ | R | 0…4294967295 |
| 209 | 1 | ເຄື່ອງຈັບເວລາ DI 16 | ແລ່ນຈັບເວລາໃນນາທີ. ຈະຣີເຊັດເມື່ອ “ຈັບເວລານັບຕັ້ງ” ຮອດແລ້ວ ແລະເລີ່ມອີກຄັ້ງ | ບໍ່ | ft | 0…14400 |
| 210 | 2 | ຕັ້ງໂມງນັບຖອຍຫຼັງ DI 16 | ການຕັ້ງຄ່າໄລຍະເວລາຂອງໂມງຈັບເວລາໃນນາທີ | ແມ່ນແລ້ວ | R/W | 0…14400 |
| 211 | 3 | DI 16 counter reset | ຣີເຊັດຄຳສັ່ງເປັນຄ່າທີ່ນັບທັງໝົດ (ກັບໄປທີ່ “0” ອັດຕະໂນມັດ) |
ບໍ່ | R/W | 0…1 |
ຂໍ້ມູນດ້ານວິຊາການ
ຮູບແຕ້ມ


ຂໍ້ມູນຈໍາເພາະ
| ການສະຫນອງພະລັງງານ | 24 Vac +10%/-15% 50 Hz, 24 Vdc +10%/-15% |
| ປັດຈຸບັນ — 70mA min, 80mA ສູງສຸດ | |
| ການປ້ອນຂໍ້ມູນດິຈິຕອນ | 16 x ດິຈິຕອລອິນພຸດ (ບໍ່ເສຍໄຟ) |
| DI ໂດຍກົງ, DI ປີ້ນກັບກັນ, PULSE (ສູງສຸດ 100 Hz, 50% ວົງຈອນຫນ້າທີ່, ສູງສຸດ 50-ohm ຕິດຕໍ່) | |
| ການໂຕ້ຕອບກັບ BEMS | RS485, optoisolated, ສູງສຸດ 63 ອຸປະກອນທີ່ສະຫນັບສະຫນູນໃນເຄືອຂ່າຍ |
| ອີເທີເນັດ/IP (ສະບັບ IP) | |
| ອະນຸສັນຍາກັບ BEMS | Modbus RTU, ອັດຕາ baud 9600 – 230400, 8 bit, ບໍ່ມີ parity, 1 stop bit |
| Modbus TCP (ລຸ້ນ IP) | |
| ການຈັດອັນດັບການປົກປ້ອງຂາເຂົ້າ | IP20, EN 61326-1 |
| ອຸນຫະພູມແລະ ຄວາມຊຸ່ມຊື່ນ |
ເຮັດວຽກ: 0°C ຫາ +50°C (32°F ຫາ 122°F), ສູງສຸດ 95% RH (ໂດຍບໍ່ມີການ condensation) |
| ການເກັບຮັກສາ: -25°C ຫາ +75°C (-13°F ຫາ 167°F), ສູງສຸດ 95% RH (ໂດຍບໍ່ມີການ condensation) | |
| ຕົວເຊື່ອມຕໍ່ | ປລັກອິນ Terminals 1 x 2.5 mm2 |
| ການຕິດຕັ້ງ | ຕິດຕັ້ງກະດານ (2x onboard sliding screw holding on the back) / DIN rail mounting |
ຄໍາແນະນໍາສໍາລັບການກໍາຈັດ
- ເຄື່ອງໃຊ້ (ຫຼືຜະລິດຕະພັນ) ຕ້ອງໄດ້ຮັບການກໍາຈັດແຍກຕ່າງຫາກຕາມກົດຫມາຍການກໍາຈັດສິ່ງເສດເຫຼືອໃນທ້ອງຖິ່ນທີ່ມີຜົນບັງຄັບໃຊ້.
- ຫ້າມຖິ້ມຜະລິດຕະພັນທີ່ເປັນຂີ້ເຫຍື້ອຂອງເທດສະບານ; ມັນຕ້ອງໄດ້ຮັບການກໍາຈັດໂດຍຜ່ານສູນກໍາຈັດສິ່ງເສດເຫຼືອພິເສດ.
- ການນໍາໃຊ້ທີ່ບໍ່ຖືກຕ້ອງຫຼືການກໍາຈັດຜະລິດຕະພັນທີ່ບໍ່ຖືກຕ້ອງອາດຈະສົ່ງຜົນກະທົບທາງລົບຕໍ່ສຸຂະພາບຂອງມະນຸດແລະສິ່ງແວດລ້ອມ.
- ໃນກໍລະນີຂອງການກໍາຈັດສິ່ງເສດເຫຼືອໄຟຟ້າແລະເອເລັກໂຕຣນິກທີ່ຜິດກົດຫມາຍ, ການລົງໂທດແມ່ນກໍານົດໂດຍກົດຫມາຍການກໍາຈັດສິ່ງເສດເຫຼືອໃນທ້ອງຖິ່ນ.
1.0 4/10/2021
ຂໍຄວາມຊ່ວຍເຫຼືອໄດ້ທີ່ http://innon.com/support
ສຶກສາເພີ່ມເຕີມໄດ້ທີ່ http://know.innon.com
ເອກະສານ / ຊັບພະຍາກອນ
 |
innon Core IO CR-IO-16DI 16 Point Modbus Input ຫຼື Output Module [pdf] ຄູ່ມືຜູ້ໃຊ້ Core IO CR-IO-16DI, 16 Point Modbus Input or Output Module, Core IO CR-IO-16DI 16 Point Modbus Input or Output Module, CR-IO-16DI, ໂມດູນປ້ອນ ຫຼື ສົ່ງອອກ |



