STMicroelectronics VL53L5CX ملټي زون د الوتنې وخت سینسر

پیژندنه
د دې کارن لارښود هدف دا دی چې څنګه د الټرا لایټ ډرایور (ULD) API په کارولو سره د VL53L5CX د الوتنې وخت (ToF) سینسر اداره کړئ. دا د وسیلې برنامه کولو لپاره اصلي دندې بیانوي ، کیلیبریشنونه ، او د محصول پایلې.
VL53L5CX د هنر، ToF، ملټي زون رینج سینسر دی چې د STMicroelectronics Flight Sense محصول کورنۍ ته وده ورکوي. په یو کوچني ریفلو وړ کڅوړه کې ځای پر ځای شوی، دا د SPAD سرې، فزیکي انفراریډ فلټرونه، او توپیر لرونکي نظری عناصر (DOE) مدغم کوي ترڅو د مختلفو محیطي روښانتیا شرایطو کې د پوښ شیشې موادو سلسله سره تر ټولو غوره فعالیت ترلاسه کړي.
د ملټي زون فاصلې اندازه کول تر 8 × 8 زونونو پورې د 63 درجې پراخه ډیګونال ساحې سره ممکن دي view (FoV) کوم چې کیدی شي
د سافټویر لخوا کم شوی. د VL53L5CX هر زون د هدف فاصله تر 4 مترو پورې اندازه کوي، د 60 Hz په اعظمي فریکونسۍ کې.
د STMicroelectronics پیټ شوي هسټوګرام الګوریتمونو څخه مننه، VL53L5CX د دې وړتیا لري چې په FoV کې مختلف شیان کشف کړي.
هسټوګرام د 60 سانتي مترو څخه هاخوا د شیشې کراسټالک پوښلو لپاره معافیت هم چمتو کوي.

حوالې
د VL53L5CX ډیټاشیټ (DS13754)
لنډیزونه او لنډیزونه
| لنډیز/مخفف | تعریف |
| DOE | متفرق نظری عنصر |
| FoV | ساحه view |
| I²C | انټر انټیګریټ سرکټ (سیریل بس) |
| Kcps/SPAD | په هر ثانیه کې د کیلو شمیره په هر سپډ کې (یونټ د SPAD په سري کې د فوټونونو شمیر اندازه کولو لپاره کارول کیږي) |
| RAM | د تصادفي لاسرسي حافظه |
| SCL | د سیریل ساعت کرښه |
| SDA | سیریل ډاټا |
| SPAD | واحد فوټون واورین ډایډډ |
| ToF | د الوتنې وخت |
| ULD | الټرا لایټ چلوونکی |
| VCSEL | د عمودی غار سطحی ایمیټینګ ډیایډ |
| VHV | ډیر لوړ حجمtage |
| Xtalk | کراسټالک |
فعالیت توضیحات
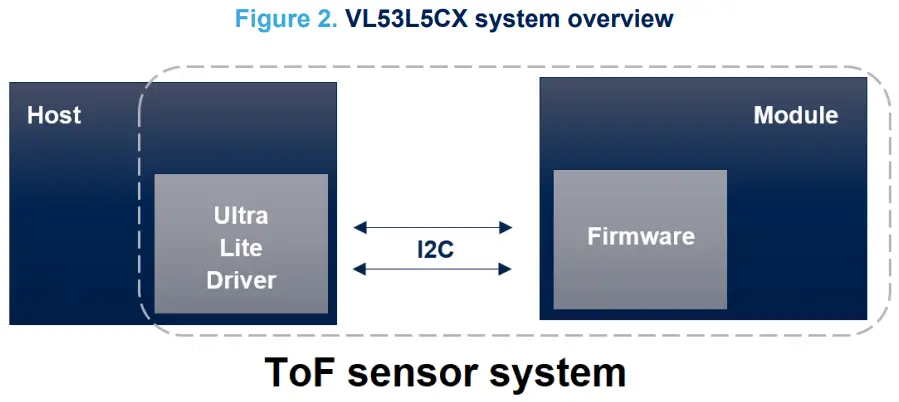
سیسټم پای ته ورسیدview
د VL53L5CX سیسټم د هارډویر ماډل او د الټرا لایټ ډرایور سافټویر (VL53L5CX ULD) څخه جوړ شوی چې په کوربه کې روان دی (لاندې انځور وګورئ). د هارډویر ماډل د ToF سینسر لري. STMicroelectronics د سافټویر ډرایور وړاندې کوي، کوم چې پدې سند کې د "ډرایور" په توګه راجع کیږي. دا سند د موټر چلوونکي دندې تشریح کوي، کوم چې کوربه ته د لاسرسي وړ دي. دا فنکشن سینسر کنټرولوي او رینج ډیټا ترلاسه کوي.
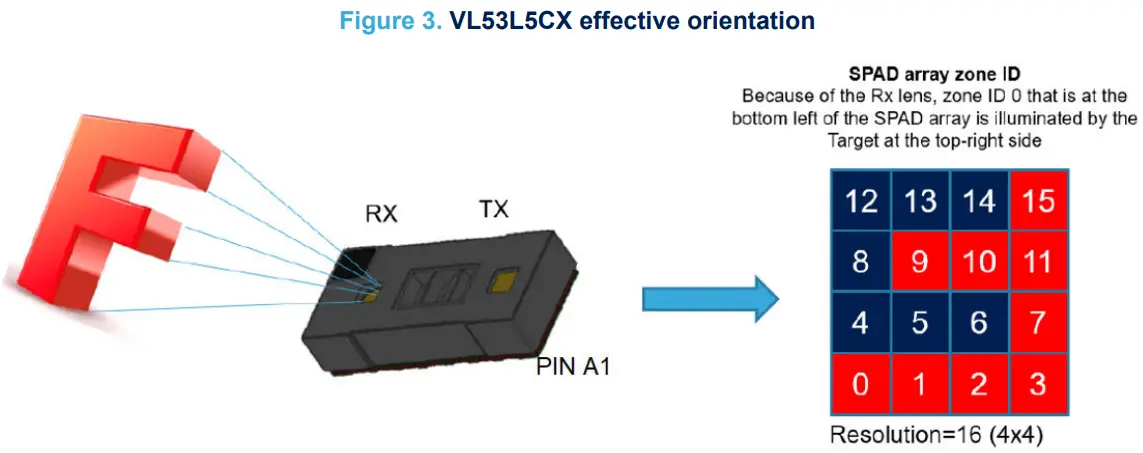
مؤثره لارښونه
په ماډل کې د Rx اپرچر باندې یو لینز شامل دی، کوم چې د هدف اخیستل شوی عکس (افقي او عمودی) فلپ کوي. په پایله کې، هغه زون چې د زون 0 په توګه پیژندل شوی، د SPAD سرې لاندې کیڼ اړخ کې، د صحنې په پورتنۍ ښي لاس کې موقعیت لرونکي هدف لخوا روښانه شوی.
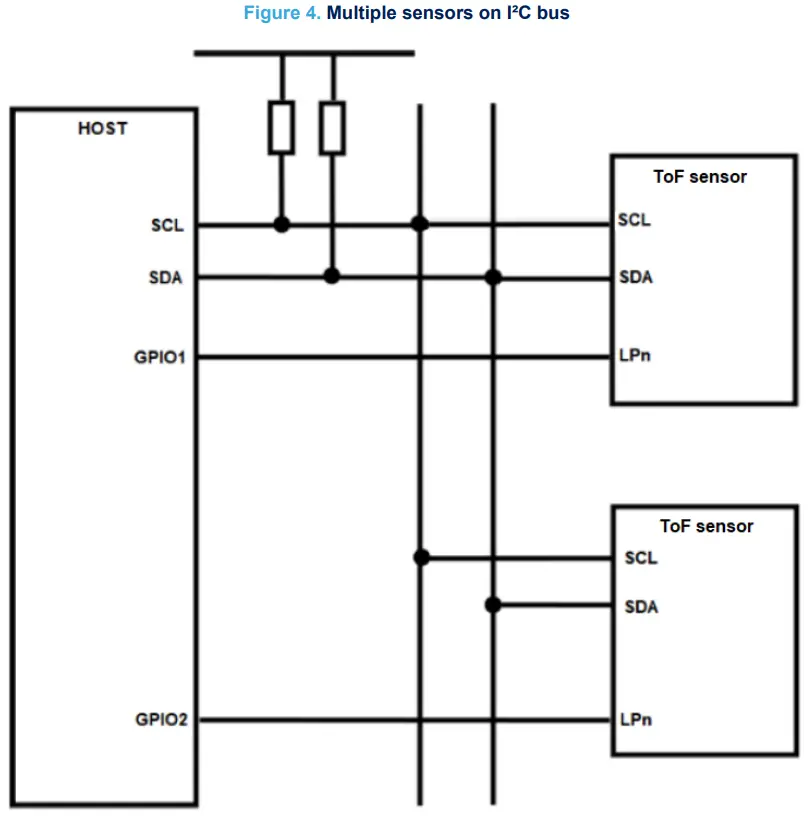
سکیماتیک او I²C تشکیلات
د ډرایور او فرم ویئر ترمنځ اړیکه د I²C لخوا اداره کیږي، د 1 MHz پورې د فعالیت وړتیا سره. پلي کول د SCL او SDA لینونو کې پل اپ اپس ته اړتیا لري. د VL53L5CX ډیټاشیټ ته مراجعه وکړئ.
د VL53L5CX وسیله د 0x52 ډیفالټ I²C پته لري. په هرصورت، دا ممکنه ده چې اصلي پته بدله کړئ ترڅو د نورو وسیلو سره د شخړو مخه ونیسي، یا د لوی سیسټم FoV لپاره سیسټم ته د ډیری VL53L5CX ماډلونو اضافه کول اسانه کړي. د I²C پته د vl53l5cx_set_i2c_address() فنکشن په کارولو سره بدلیدلی شي.
د دې لپاره چې یو وسیلې ته اجازه ورکړي چې خپل I²C پته بدل کړي پرته لدې چې په I²C بس کې نورو اغیزه وکړي ، دا مهمه ده چې د وسیلو د I²C مخابرات غیر فعال کړئ چې بدلون نه کوي. کړنلاره په لاندې ډول ده:
- سیسټم د نورمال په توګه ځواکمن کړئ.
- د وسیلې LPn پن ښکته کړئ چې پته به یې بدله نه کړي.
- د هغه وسیلې LPn پن پورته کړئ چې د I²C پته یې بدله شوې ده.
- د Set_i2c_address() فنکشن په کارولو سره آلې ته د I²C پته برنامه کړئ.
- د وسیلې LPn پن پورته کړئ چې له سره پروګرام نه کیږي.
ټول وسایل باید اوس په I²C بس کې شتون ولري. پورتني مرحلې په سیسټم کې د ټولو VL53L5CX وسیلو لپاره تکرار کړئ چې نوي I²C پتې ته اړتیا لري.
د بسته بندي محتوا او د معلوماتو جریان
د ډرایور جوړښت او مینځپانګه
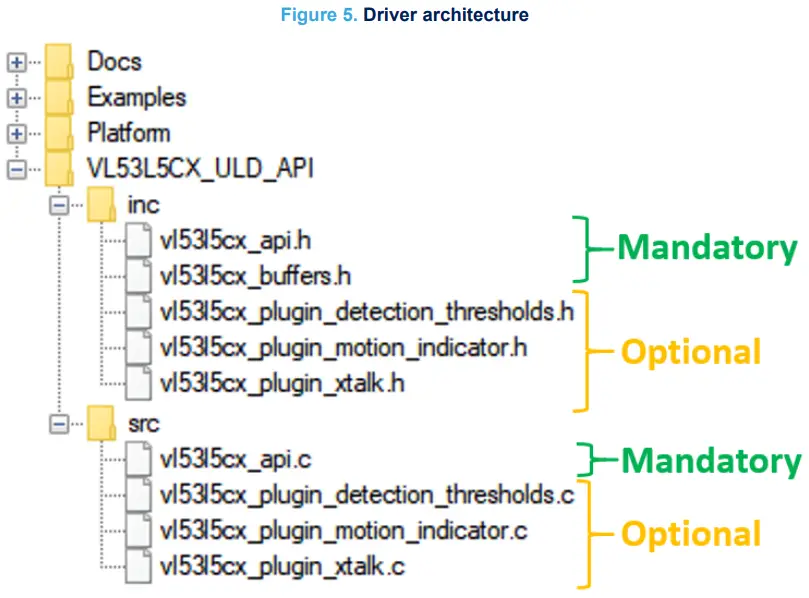
د VL53L5CX ULD کڅوړه د څلورو فولډرو څخه جوړه شوې ده. ډرایور په فولډر / VL53L5CX_ULD_API کې موقعیت لري.
چلوونکی له لازمي او اختیاري څخه جوړ شوی دی files. اختیاري files دي plugins د ULD ځانګړتیاو پراخولو لپاره کارول کیږي.
هر پلگ ان د "vl53l5cx_plugin" کلمې سره پیل کیږي (د مثال په توګه vl53l5cx_plugin_xtalk.h). که چیرې کاروونکي وړاندیز شوي نه غواړي plugins، دوی د نورو ډرایور ځانګړتیاو اغیزه کولو پرته لرې کیدی شي. لاندې شکل د لازمي استازیتوب کوي files او اختیاري plugins.
کارونکي هم اړتیا لري چې دوه پلي کړي fileد /پلیټ فارم فولډر کې موقعیت لري. وړاندیز شوی پلیټ فارم یو خالي شیل دی، او باید د وقف شوي دندو څخه ډک شي.
یادونه: Platform.h file د ULD کارولو لپاره لازمي میکرو لري. ټول د file منځپانګه د ULD په سمه توګه کارولو لپاره لازمي ده.
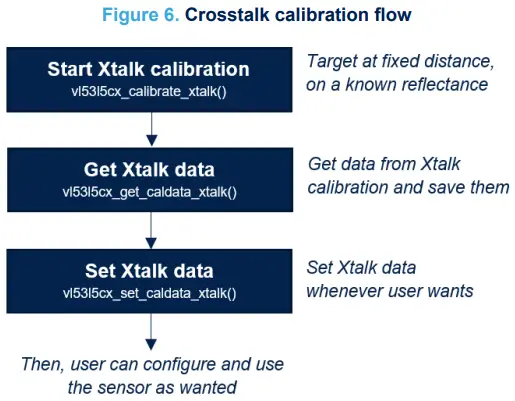
کیلیبریشن جریان
Crosstalk (Xtalk) د SPAD په سري کې د ترلاسه شوي سیګنال مقدار په توګه تعریف شوی، کوم چې د VCSEL رڼا انعکاس د محافظتي کړکۍ (کور شیشې) دننه د ماډل په سر کې اضافه شوي. د VL53L5CX ماډل پخپله انډول شوی دی، او پرته له کوم اضافي کیلیبریشن څخه کارول کیدی شي.
که چیرې ماډل د پوښ شیشې لخوا خوندي وي نو د کراسټالک کیلیبریشن ته اړتیا لیدل کیدی شي. VL53L5CX د هسټوګرام الګوریتم څخه مننه د 60 سانتي مترو څخه هاخوا د کراسټالک لپاره معافیت لري. په هرصورت، د 60 سانتي مترو څخه په لنډ واټن کې، Xtalk کیدای شي د اصلي بیرته راستانه شوي سیګنال څخه لوی وي. دا د غلط هدف لوستل ورکوي یا هدفونه د واقعیا په پرتله نږدې ښکاري. د کراسټالک کیلیبریشن ټولې دندې په Xtalk پلگ ان کې شاملې دي (اختیاري). کارونکي اړتیا لري چې وکاروي file 'vl53l5cx_plugin_xtalk'.
کراسټالک یو ځل کیلیبریټ کیدی شي، او ډاټا خوندي کیدی شي نو دا وروسته بیا کارول کیدی شي. یو هدف په ټاکلي فاصله کې، د پیژندل شوي انعکاس سره اړین دی. لږ تر لږه د اړتیا وړ فاصله 600 mm ده، او هدف باید ټول FoV پوښښ کړي. په ترتیب پورې اړه لري، کاروونکي کولی شي ترتیبات بدل کړي ترڅو د کراسټالک کیلیبریشن تطبیق کړي، لکه څنګه چې په لاندې جدول کې وړاندیز شوی.
میز 1. د کیلیبریشن لپاره موجود ترتیبات
| ترتیب | من | د STMicroelectronics لخوا وړاندیز شوی | مکس |
| واټن [mm] | 600 | 600 | 3000 |
| د s شمیرamples | 1 | 4 | 16 |
| انعکاس [٪] | 1 | 3 | 99 |
یادونه: د شمیر زیاتولamples دقت زیاتوي، مګر دا د کیلیبریشن وخت هم زیاتوي. وخت د s شمیر سره تړاو لريamples خطي دی، او ارزښتونه د نږدې وخت پای تعقیبوي:
- 1 sample ≈ 1 ثانیه
- 4 samples ≈ 2.5 ثانیې
- 16 samples ≈ 8.5 ثانیې
کیلیبریشن د فنکشن vl53l5cx_calibrate_xtalk() په کارولو سره ترسره کیږي. دا فنکشن په هر وخت کې کارول کیدی شي. په هرصورت، سینسر باید لومړی پیل شي. لاندې شکل د کراسټالک کیلیبریشن جریان استازیتوب کوي.
د جریان جریان
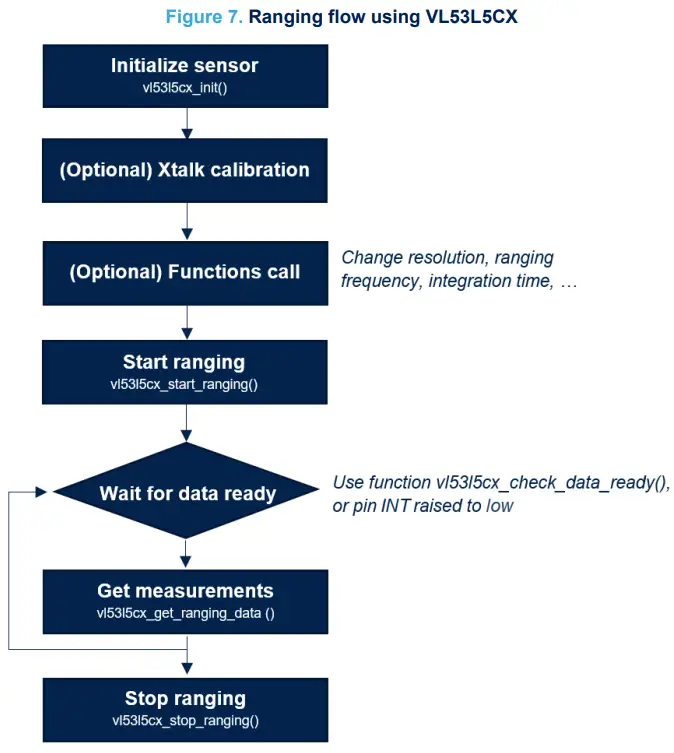
لاندې شکل د اندازه کولو لپاره کارول شوي رینج جریان څرګندوي. د رینګ سیشن پیل کولو دمخه د Xtalk کیلیبریشن او اختیاري فنکشن زنګونه باید وکارول شي. د ترلاسه کولو/سیټ فنکشنونه د یوې منظمې ناستې په جریان کې نشي کارول کیدی، او 'په الوتنه کې' برنامه نه ملاتړ کیږي.
شته ځانګړتیاوې
د VL53L5CX ULD API کې ډیری دندې شاملې دي، کوم چې کارونکي ته اجازه ورکوي چې سینسر ټون کړي، د کارونې قضیې پورې اړه لري. د موټر چلوونکي لپاره موجود ټولې دندې په لاندې برخو کې تشریح شوي.
پیل کول
پیل باید د VL53L5CX سینسر کارولو دمخه ترسره شي. دا عملیات کارونکي ته اړتیا لري:
- په سینسر کې بریښنا (VDDIO، AVDD، LPn پنونه لوړ ته ټاکل شوي، او پن I2C_RST 0 ته ټاکل شوي)
- فنکشن ته زنګ ووهئ vl53l5cx_init(). فنکشن ماډل ته فرم ویئر (~ 84 Kbytes) کاپي کوي. دا د I²C انٹرفیس کې د کوډ په پورته کولو سره ترسره کیږي، او د پیل کولو بشپړولو لپاره د بوټ معمول ترسره کول.
د سینسر تنظیم کول
د وسیلې د بیا تنظیمولو لپاره، لاندې پنونو ته اړتیا ده چې بدل شي:
- VDDIO، AVDD، او LPn پنونه ټیټ ته تنظیم کړئ.
- 10 ms انتظار وکړئ.
- VDDIO، AVDD، او LPn پنونه لوړ ته تنظیم کړئ.
یادونه: یوازې د I2C_RST پن ټګل کول د I²C ارتباط بیا تنظیموي.
قرارداد
پریکړه د شته زونونو شمیر سره مطابقت لري. د VL53L5CX سینسر دوه احتمالي ریزولوشنونه لري: 4 × 4 (16 زونونه) او 8 × 8 (64 زونونه). په ډیفالټ ډول سینسر په 4 × 4 کې برنامه شوی.
فنکشن vl53l5cx_set_resolution() کارونکي ته اجازه ورکوي چې ریزولوشن بدل کړي. لکه څنګه چې د رینج فریکونسۍ په ریزولوشن پورې اړه لري، دا فنکشن باید د رینج فریکونسۍ تازه کولو دمخه وکارول شي. سربیره پردې ، د ریزولوشن بدلول د I²C بس کې د ترافیک اندازه هم زیاتوي کله چې پایلې لوستل کیږي.
د رینج فریکونسۍ
د رینج فریکونسۍ د اندازه کولو فریکونسۍ بدلولو لپاره کارول کیدی شي. لکه څنګه چې اعظمي فریکونسۍ د 4 × 4 او 8 × 8 ریزولوشنونو ترمینځ توپیر لري ، نو دا فنکشن باید د ریزولوشن غوره کولو وروسته وکارول شي. لږترلږه او اعظمي اجازه ورکړل شوي ارزښتونه په لاندې جدول کې لیست شوي دي.
میز 2. لږترلږه او اعظمي حد فریکونسی
| قرارداد | د دقیقې کچې فریکونسۍ [Hz] | اعظمي حد فریکونسۍ [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
د رینګ فریکوینسي د فنکشن vl53l5cx_set_range_frequency_hz() په کارولو سره تازه کیدی شي. په ډیفالټ ، د رینج فریکونسۍ 1 Hz ته ټاکل شوې.
رینګ موډ
د رینګ موډ کارونکي ته اجازه ورکوي چې د لوړ فعالیت یا ټیټ بریښنا مصرف کې د رینج تر مینځ غوره کړي. دوه طریقې وړاندیز شوي دي:
- دوامداره: وسیله په دوامداره توګه د کارونکي لخوا تعریف شوي حد فریکونسۍ سره چوکاټونه نیسي. VCSEL د ټولو رینجونو په جریان کې فعال شوی، نو د حد تر حده فاصله او محیط معافیت غوره دی. دا حالت د ګړندي رینج اندازه کولو یا لوړ فعالیت لپاره مشوره کیږي.
- خودمختاره: دا د ډیفالټ حالت دی. وسیله په دوامداره توګه د کارونکي لخوا تعریف شوي رینج فریکونسۍ سره چوکاټونه نیسي. VCSEL د کارونکي لخوا تعریف شوي دوره کې فعال شوی، د فنکشن vl53l5cx_set_integration_time_ms(). لکه څنګه چې VCSEL تل فعال نه وي، د بریښنا مصرف کم شوی. ګټې د کم شوي رینج فریکونسۍ سره خورا څرګند دي. دا حالت د ټیټ بریښنا غوښتنلیکونو لپاره وړاندیز شوی.
رینج موډ د فنکشن vl53l5cx_set_range_mode() په کارولو سره بدلیدلی شي.
د ادغام وخت
د ادغام وخت یو خصوصیت دی چې یوازې د خودمختار رینج موډ په کارولو سره شتون لري (د 4.5 برخې ته مراجعه وکړئ: رینګ موډ). دا کارونکي ته اجازه ورکوي چې وخت بدل کړي پداسې حال کې چې VCSEL فعال شوی. د ادغام وخت بدلول که چیرې رینج موډ په دوامداره توګه ټاکل شوی وي هیڅ اغیزه نلري. د ډیفالټ ادغام وخت 5 ms ته ټاکل شوی.
د ادغام وخت اغیزه د 4 × 4 او 8 × 8 حلونو لپاره توپیر لري. ریزولوشن 4 × 4 د یو ادغام وخت څخه جوړ شوی ، او 8 × 8 ریزولوشن د څلور ادغام وختونو څخه جوړ شوی. لاندې ارقام د دواړو پریکړو لپاره د VCSEL اخراج استازیتوب کوي.
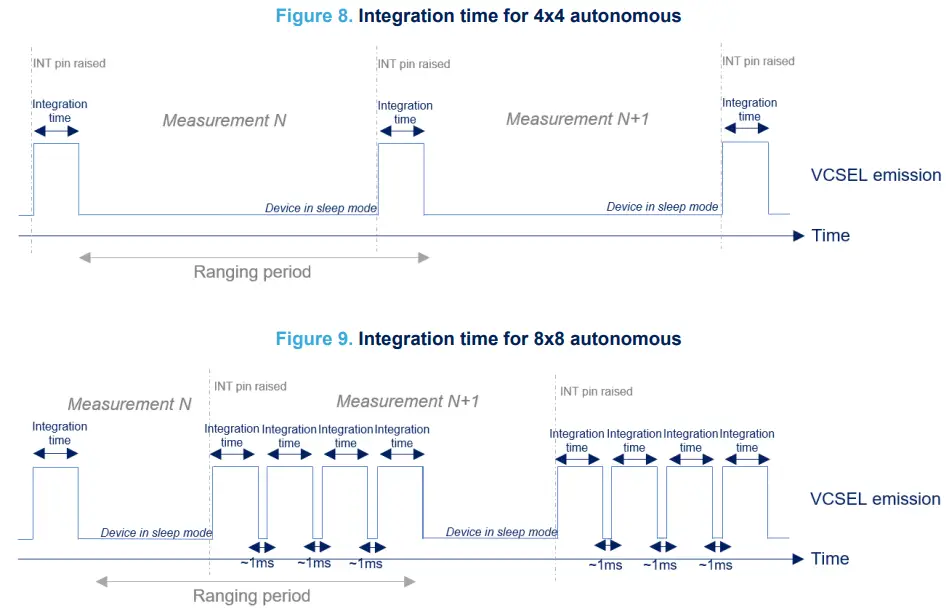
د ټولو ادغام وختونو مجموعه + 1 ms overhead باید د اندازه کولو مودې څخه ټیټ وي. که نه نو، د رینج موده په اوتومات ډول زیاتیږي.
د بریښنا طریقې
د بریښنا حالتونه د بریښنا مصرف کمولو لپاره کارول کیدی شي کله چې وسیله نه کارول کیږي. VL53L5CX کولی شي په لاندې بریښنایی حالتونو کې کار وکړي:
- وییک اپ: وسیله په HP بې کاره (لوړ ځواک) کې تنظیم شوې ، لارښوونو ته انتظار باسي.
- خوب: وسیله په LP بې کاره (ټیټ بریښنا) کې تنظیم شوې ، د ټیټ بریښنا حالت. وسیله تر هغه وخته پورې نشي کارول کیدی تر څو چې په وییک اپ حالت کې تنظیم شوی نه وي.
دا حالت فرم ویئر او ترتیب ساتي.
د بریښنا حالت د فنکشن vl53l5cx_set_power_mode() په کارولو سره بدلیدلی شي. ډیفالټ حالت وییک اپ دی.
یادونه: که چیرې کاروونکي وغواړي د بریښنا حالت بدل کړي، وسیله باید په منظم حالت کې نه وي.
شارپینر
د هدف څخه بیرته راستنیدونکي سیګنال د تیزو څنډو سره پاک نبض ندی. څنډې لیرې تیریږي او ممکن په نږدې زونونو کې راپور شوي فاصلې اغیزه وکړي. شارپینر د پردې له امله رامینځته شوي ځینې یا ټول سیګنال لرې کولو لپاره کارول کیږي.
د پخوانيampپه لاندې شکل کې ښودل شوي د 100 mm نږدې هدف په FOV کې په مرکز کې ښودل شوی، او بل هدف، په 500 mm کې وروسته پاتې دی. د شارپینر ارزښت پورې اړه لري، نږدې هدف ممکن د اصلي څخه په ډیرو زونونو کې څرګند شي.
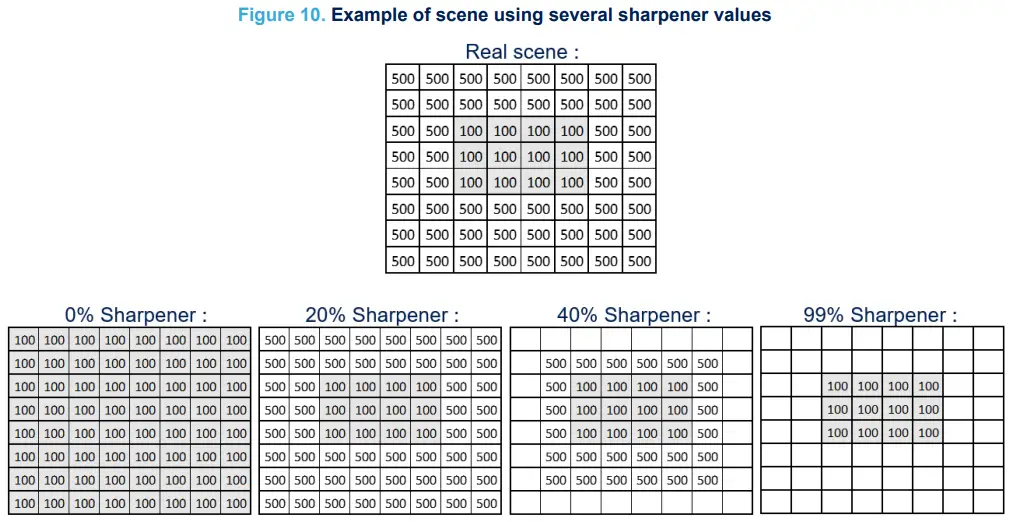
شارپینر د فنکشن vl53l5cx_set_sharpener_percent() په کارولو سره بدلیدلی شي. اجازه ورکړل شوي ارزښتونه د 0٪ او 99٪ ترمنځ دي. اصلي ارزښت 5٪ دی.
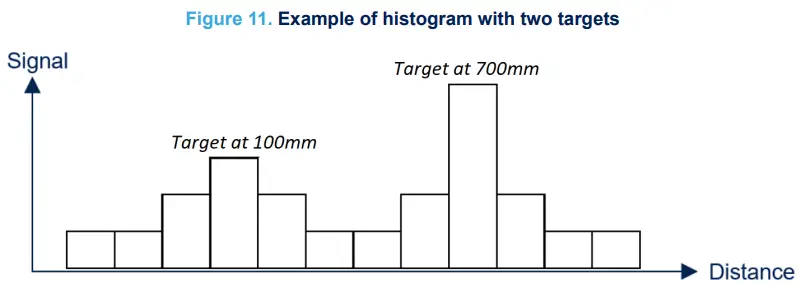
د هدف امر
VL53L5CX کولی شي په هر زون کې ډیری هدفونه اندازه کړي. د هسټوګرام پروسس کولو څخه مننه، کوربه کولی شي د راپور شوي اهدافو ترتیب غوره کړي. دوه اختیارونه شتون لري:
- نږدې: ترټولو نږدې هدف لومړی راپور شوی
- پیاوړی: ترټولو پیاوړی هدف لومړی راپور شوی
د هدف ترتیب د فنکشن vl53l5cx_set_target_order() په کارولو سره بدلیدلی شي. ډیفالټ ترتیب خورا پیاوړی دی.
د پخوانيample په لاندې شکل کې د دوه هدفونو کشف څرګندوي. یو په 100 ملی میتر کې د ټیټ انعکاس سره ، او بل په 700 ملی میتر کې د لوړ انعکاس سره.
په هر زون کې ډیری هدفونه
VL53L5CX په هر زون کې تر څلورو هدفونو اندازه کولی شي. کارونکي کولی شي د سینسر لخوا بیرته راستانه شوي هدفونو شمیر تنظیم کړي.
یادونه: د دوو هدفونو تر منځ لږ تر لږه فاصله باید 600 ملي متره وي.
انتخاب د موټر چلوونکي څخه امکان نلري؛ دا باید په 'Platform.h' کې ترسره شي file. میکرو VL53L5CX_NB_ TARGET_PER_ZONE باید د 1 او 4 ترمنځ ارزښت ته وټاکي. د هدف ترتیب په 4.9 برخه کې بیان شوی: د هدف ترتیب مستقیم د کشف شوي هدف ترتیب اغیزه کوي. په ډیفالټ سره، سینسر یوازې په هر زون کې اعظمي حد ته یو هدف تولیدوي.
یادونه: په هر زون کې د هدفونو زیاتوالی د مطلوب RAM اندازه ډیروي
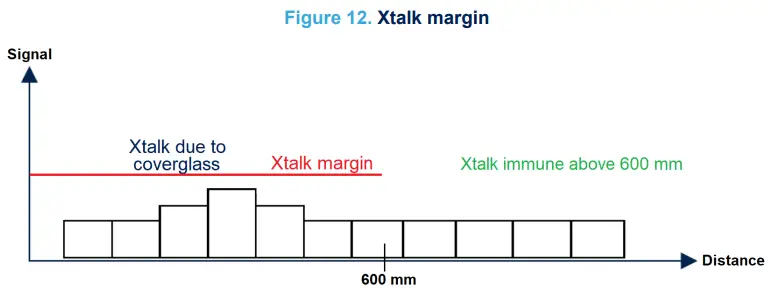
د Xtalk حاشیه
د Xtalk حاشیه یو اضافي خصوصیت دی چې یوازې د Xtalk پلگ ان په کارولو سره شتون لري. د .c او .f files 'vl53l5cx_plugin_xtalk' کارولو ته اړتیا لري.
حاشیه د کشف حد بدلولو لپاره کارول کیږي کله چې د پوښ ګلاس د سینسر په پورتنۍ برخه کې شتون ولري. حد د دې لپاره لوړ کیدی شي ترڅو ډاډ ترلاسه شي چې د پوښ شیشې هیڅکله کشف نشي ، د کراسټالک کیلیبریشن ډیټا تنظیم کولو وروسته. د مثال لپارهampپه هرصورت، کاروونکي کولی شي په یو واحد وسیله د کراسټالک کیلیبریشن پرمخ بوځي، او د نورو ټولو وسیلو لپاره ورته کیلیبریشن ډیټا بیا وکاروي. د Xtalk حاشیه د کراسټالک اصلاح کولو لپاره کارول کیدی شي. لاندې انځور د Xtalk حاشیې استازیتوب کوي.
د کشف حدونه
د منظم رینج ظرفیتونو سربیره ، سینسر د ټاکل شوي ټاکل شوي معیارونو لاندې یو څیز کشف کولو لپاره برنامه کیدی شي. دا خصوصیت د پلگ ان "د کشف حد" په کارولو سره شتون لري ، کوم چې یو اختیار دی چې په ډیفالټ API کې شامل نه دی. د fileد 'vl53l5cx_plugin_detection_thresholds' په نوم یادیږي باید وکارول شي.
دا فیچر د پین A3 (INT) لپاره د مداخلې رامینځته کولو لپاره کارول کیدی شي کله چې د کارونکي لخوا تعریف شوي شرایط پوره شي. درې ممکنه تشکیلات شتون لري:
- ریزولوشن 4×4: په هر زون کې د یو حد کارول (ټول 16 حدونه)
- ریزولوشن 4×4: په هر زون کې د دوه حدونو کارول (په ټولیز ډول 32 حدونه)
- ریزولوشن 8×8: په هر زون کې د یو حد کارول (ټول 64 حدونه)
هر څه چې کارول شوي ترتیبونه، د حدونو جوړولو لپاره طرزالعمل او د RAM اندازه یو شان دي. د هر حد د ترکیب لپاره، ډیری ساحې باید ډکې شي: - د زون id: د ټاکل شوي زون id (د 2.2 برخې ته مراجعه وکړئ: اغیزمن لوري ته)
- اندازه کول: د نیولو اندازه (فاصله، سیګنال، د SPADs شمیر، ...)
- ډول: د اندازه کولو کړکۍ (په کړکۍ کې، د کړکۍ څخه بهر، د ټیټ حد څخه ښکته، ...)
- ټیټ حد: د محرک لپاره ټیټ حد کاروونکي. کارن اړتیا نلري چې بڼه ترتیب کړي، دا په اتوماتيک ډول د API لخوا اداره کیږي.
- لوړ حد: د محرک لپاره لوړ حد کاروونکي. کاروونکي اړتیا نلري چې بڼه ترتیب کړي؛ دا په اتوماتيک ډول د API لخوا اداره کیږي.
- ریاضيیک عملیات: یوازې په هر زون کې د 4 × 4 - 2 حد ترکیبونو لپاره کارول کیږي. کارونکي کولی شي په یو زون کې د څو حدونو په کارولو سره ترکیب تنظیم کړي.
د حرکت شاخص
د VL53L5CX سینسر یو ایمبیډ شوي فرم ویئر ځانګړتیا لري چې په صحنه کې د حرکت کشف کولو ته اجازه ورکوي. د حرکت شاخص د ترتیب شوي چوکاټونو ترمنځ محاسبه کیږي. دا اختیار د plugin'vl53l5cx_plugin_motion_indicator' په کارولو سره شتون لري.
د حرکت شاخص د vl53l5cx_motion_indicator_init() فنکشن په کارولو سره پیل شوی. د سینسر ریزولوشن بدلولو لپاره ، د وقف شوي فنکشن په کارولو سره د حرکت شاخص ریزولوشن تازه کړئ: vl53l5cx_motion_indicator_set_resolution().
کارونکی ممکن د حرکت کشف کولو لپاره لږترلږه او اعظمي فاصلې هم بدل کړي. د لږ تر لږه او اعظمي فاصلو ترمنځ توپیر له 1500 ملي میتر څخه زیات نه وي. په ډیفالټ ډول، فاصلې د 400 mm او 1500 mm ترمنځ ارزښتونو سره پیل کیږي.
پایلې په ساحه کې زیرمه شوي 'حرکت_انډیکیټر'. په دې ساحه کې، سرې 'حرکت' یو ارزښت ورکوي چې په هر زون کې د حرکت شدت لري. لوړ ارزښت د چوکاټونو ترمنځ د لوړ حرکت توپیر څرګندوي. یو عادي حرکت د 100 او 500 ترمنځ ارزښت ورکوي. دا حساسیت د ادغام وخت، هدف واټن، او د هدف انعکاس پورې اړه لري.
د ټیټ بریښنا غوښتنلیکونو لپاره یو مثالی ترکیب د خودمختاره رینج موډ سره د حرکت شاخص کارول دي ، او په حرکت کې برنامه شوي کشف حدونه. دا د لږترلږه بریښنا مصرف سره په FoV کې د حرکت بدلونونو موندلو ته اجازه ورکوي.
د دوراني حرارت تاوان
د درجه بندي فعالیت د تودوخې بدلونونو لخوا اغیزمن کیږي. د VL53L5CX سینسر د تودوخې تاوان سرایت کوي چې یوځل کیلیبریټ کیږي کله چې سټینګ پیل کیږي. په هرصورت، که چیرې تودوخه وده وکړي، تاوان ممکن د نوي تودوخې سره سمون ونلري. د دې مسلې څخه مخنیوي لپاره، پیرودونکي کولی شي د اتوماتیک VHV په کارولو سره د تودوخې د تودوخې معاوضه ترسره کړي. د تودوخې د دوراني کیلیبریشن د چلولو لپاره څو ملی ثانیې وخت نیسي. کارونکي کولی شي دوره تعریف کړي.
د دې خصوصیت کارولو لپاره، پیرودونکي اړتیا لري:
• فنکشن ته زنګ ووهئ vl53l5cx_set_VHV_repeat_count().
• بیا، د هر نوي کیلیبریشن تر منځ د چوکاټونو شمیر د دلیل په توګه ورکړئ.
که دلیل 0 وي، خساره غیر فعاله ده.
د پایلو درجه بندي
موجود معلومات
د هدف او چاپیریال ډیټا پراخه لیست ممکن د مختلف فعالیتونو په جریان کې تولید شي. لاندې جدول د کارونکي لپاره موجود پیرامیټونه تشریح کوي.
میز 3. د VL53L5CX سینسر په کارولو سره موجود محصول
| عنصر | Nb بایټس (RAM) | واحد | تفصیل |
| د SPAD لپاره محیط | 256 | Kcps/SPAD | د محیطي نرخ اندازه کول په SPAD صف کې ترسره شوي، پرته له کوم فعال فوټون اخراج، د غږ له امله د محیطي سیګنال اندازه اندازه کولو لپاره. |
| د کشف شویو هدفونو شمیر | 64 | هیڅ نه | په اوسني زون کې د کشف شویو هدفونو شمیر. دا ارزښت باید لومړی وي چې د اندازه کولو اعتبار پوهیدو لپاره چیک کړي. |
| د SPADs شمیر فعال شوي | 256 | هیڅ نه | د اوسني اندازه کولو لپاره د فعال شوي SPADs شمیر. یو لرې یا ټیټ انعکاس هدف ډیر SPADs فعالوي. |
| د SPAD لپاره سیګنال | 256 x nb هدفونه برنامه شوي | Kcps/SPAD | د فوتونونو مقدار د VCSEL نبض په جریان کې اندازه شوی. |
| رینج سیګما | 128 x nb هدفونه برنامه شوي | ملیمیټر | د راپور شوي هدف واټن کې د شور لپاره سیګما اټکل کونکی. |
| واټن | 128 x nb هدفونه برنامه شوي | ملیمیټر | د هدف واټن |
| د هدف حالت | 64 x nb هدفونه برنامه شوي | هیڅ نه | د اندازه کولو اعتبار. وګورئ دریمه برخه: پایلې تفسیر د نورو معلوماتو لپاره. |
| انعکاس | 64 x شمیره هدفونه برنامه شوي | سلنه | د اټکل شوي هدف انعکاس په سلنه کې |
| د حرکت شاخص | 140 | هیڅ نه | جوړښت چې د حرکت شاخص پایلې لري. ساحه 'حرکت' د حرکت شدت لري. |
یادونه: د څو عناصرو لپاره (په هر ځای کې سیګنال، سیګنال، …) ډیټا ته لاسرسی توپیر لري که چیرې کارونکي په هر زون کې له یو څخه زیات هدفونه پروګرام کړي وي (د 4.10 برخه وګورئ: په هر زون کې ډیری هدفونه). د مثال په توګه وګورئampد لا زیاتو معلوماتو لپاره کوډونه.
د محصول انتخاب دودیز کړئ
په ډیفالټ سره، ټول VL53L5CX محصول فعال شوي. که اړتیا وي، کاروونکي کولی شي ځینې سینسر محصولات غیر فعال کړي.
د اندازه کولو غیر فعال کول په موټر چلوونکي کې شتون نلري؛ دا باید په 'Platform.h' کې ترسره شي file. کارن کولی شي د محصول غیر فعالولو لپاره لاندې میکرو اعلان کړي:
# VL53L5CX_DISABLE_AMBIENT_PER_SPAD تعریف کړئ
# VL53L5CX_DISABLE_NB_SPADS_ENABLED تعریف کړئ
# VL53L5CX_DISABLE_NB_TARGET_DETECTED تعریف کړئ
# VL53L5CX_DISABLE_SIGNAL_PER_SPAD تعریف کړئ
# تعریف کړئ VL53L5CX_DISABLE_RANGE_SIGMA_MM
# تعریف کړئ VL53L5CX_DISABLE_DISTANCE_MM
# VL53L5CX_DISABLE_TARGET_STATUS تعریف کړئ
# تعریف کړئ VL53L5CX_DISABLE_REFLECTANCE_PERCENT
# VL53L5CX_DISABLE_MOTION_INDICATOR تعریف کړئ
په پایله کې، ساحې د پایلو په جوړښت کې ندي اعلان شوي، او ډاټا کوربه ته نه لیږدول کیږي. د RAM اندازه او د I²C اندازه کمه شوې ده.
د دې لپاره چې د معلوماتو ثبات یقیني کړي، ST تل سپارښتنه کوي چې د "د نښه شویو هدفونو شمیر" او د "هدف حالت" فعال وساتي. دا اندازه کول د هدف حالت پورې اړه لري (د 5.5 برخې ته مراجعه وکړئ: د پایلو تشریح).
دقیقې پایلې ترلاسه کول
د رینج سیشن په جریان کې، دوه لارې شتون لري چې پوه شي که نوي رینج ډیټا شتون ولري:
- د رای ورکولو حالت: په دوامداره توګه vl53l5cx_check_data_ready(). دا د سینسر لخوا بیرته راستنیدونکي نوي جریان شمیره کشف کوي.
- د مداخلې حالت: په پن A3 (GPIO1) کې راپورته شوي مداخلې ته انتظار باسي. مداخله په اتوماتيک ډول د 100 μs وروسته پاکیږي.
کله چې نوې ډاټا چمتو وي، پایلې د فنکشن vl53l5cx_get_range_data() په کارولو سره لوستل کیدی شي. دا یو تازه جوړښت بیرته راګرځوي چې ټول غوره شوي محصول لري. لکه څنګه چې وسیله غیر متناسب ده ، د رینګ سیشن ته دوام ورکولو لپاره د پاکولو لپاره هیڅ مداخله شتون نلري.
دا خصوصیت د دواړو دوامداره او خپلواکه رینج موډلونو لپاره شتون لري.
د خام فرم ویئر فارمیټ کارول
د I²C له لارې د رینج ډیټا لیږدولو وروسته ، د فرم ویئر فارمیټ او کوربه فارمیټ ترمینځ تبادله شتون لري. دا عملیات په عموم ډول د سینسر د ډیفالټ محصول په توګه په ملی مترو کې د فاصلې لرې کولو لپاره ترسره کیږي. که کاروونکي غواړي د فرم ویئر بڼه وکاروي، لاندې میکرو باید په پلیټ فارم کې تعریف شي file: VL53L5CX
# VL53L5CX_USE_RAW_FORMAT تعریف کړئ
د پایلو تفسیر
د VL53L5CX لخوا بیرته راستانه شوي ډاټا د هدف حالت په پام کې نیولو لپاره فلټر کیدی شي. حالت د اندازه کولو اعتبار په ګوته کوي. د بشپړ حالت لیست په لاندې جدول کې بیان شوی.
میز 4. د شته هدفونو لیست
| د هدف حالت | تفصیل |
| 0 | د رینج ډیټا تازه شوي ندي |
| 1 | په SPAD صف کې د سیګنال کچه خورا ټیټه ده |
| 2 | د هدف پړاو |
| 3 | د سیګما اټکل کوونکی ډیر لوړ دی |
| 4 | د هدف تسلسل ناکام شو |
| 5 | سلسله د اعتبار وړ ده |
| 6 | په شاوخوا کې لفافه نه ده ترسره شوې (معمولا لومړی سلسله) |
| 7 | د نرخ تسلسل ناکام شو |
| 8 | د اوسني هدف لپاره د سیګنال کچه خورا ټیټه ده |
| 9 | رینج د لوی نبض سره اعتبار لري (شاید د یوځای شوي هدف له امله وي) |
| 10 | رینج اعتبار لري، مګر په تیرو رینج کې هیڅ هدف ندی موندل شوی |
| 11 | د اندازه کولو تسلسل ناکام شو |
| 12 | هدف د یو بل لخوا روښانه شوی، د تیزونکي له امله |
| 13 | هدف کشف شوی مګر متناسب معلومات. ډیری وختونه د ثانوي اهدافو لپاره پیښیږي. |
| 255 | هیڅ هدف ندی موندل شوی (یوازې په هغه صورت کې چې د نښه شوي هدفونو شمیر فعال شوی وي) |
د ثابت معلوماتو لپاره، کاروونکي اړتیا لري چې د ناسم هدف حالت فلټر کړي. د اعتماد درجه ورکولو لپاره، د 5 حالت سره یو هدف 100٪ معتبر ګڼل کیږي. د 6 یا 9 وضعیت د 50٪ د باور ارزښت سره په پام کې نیول کیدی شي. نور ټول حالتونه د 50٪ باور کچې څخه ښکته دي.
د موټر چلوونکي تېروتنې
کله چې د VL53L5CX سینسر په کارولو سره کومه تېروتنه رامنځته شي، موټر چلوونکی یو ځانګړی تېروتنه راګرځوي. لاندې جدول د ممکنه تېروتنې لیست کوي.
میز 5. د چلوونکي په کارولو سره د شته غلطیتونو لیست
| د هدف حالت | تفصیل |
| 0 | کومه تېروتنه نشته |
|
127 |
کارونکي یو غلط ترتیب پروګرام کړی
(نامعلوم ریزولوشن، د رینج فریکونسۍ ډیره لوړه، ...) |
| 255 | لویه تېروتنه. معمولا د وخت پای تېروتنه، د I²C تېروتنې له امله. |
| نور | د ډیری غلطیو ترکیب چې پورته تشریح شوي |
یادونه: کوربه کولی شي د پلیټ فارم په کارولو سره نور غلط کوډونه پلي کړي files.
د بیاکتنې تاریخ
میز 6. د اسنادو د بیاکتنې تاریخ
| نیټه | نسخه | بدلونونه |
| ۱۶-جون-۲۳ | 1 | ابتدايي خوشې کول |
| 30-اګسټ-2021 | 2 | زیاته کړه برخه 5.4: د خام فرم ویئر فارمیټ کارول
د نوي هدف حالت 13 کې اضافه شو جدول 4. د شته هدفونو لیست |
| 05-سپتمبر 2022 | 3 | د هدفونو تر مینځ د لږترلږه لږترلږه واټن په اړه یادښت اضافه شوی 4.10 برخه: په هر زون کې څو هدفونه |
| 10-اګسټ-2023 | 4 | تعدیل شوی شکل 11. پخوانیampد دوه هدفونو سره د هسټوګرام لی |
| ۲۰۲۰-فبروري-۱ | 5 | VHV اضافه شوی (ډیر لوړ حجمtage) ته 1 برخه: لنډیزونه او لنډیزونه. زیاته کړه 4.14 برخه: د تودوخې د دوراني تاوان |
مهم خبرتیا – په دقت سره ولولئ
STMicroelectronics NV او د هغې فرعي شرکتونه ("ST") حق لري چې د ST محصولاتو او/یا دې سند کې هر وخت پرته له خبرتیا څخه بدلونونه، سمونونه، وده، تعدیلات، او اصلاحات راولي. پیرودونکي باید د سپارښتنو ورکولو دمخه د ST محصولاتو په اړه وروستي اړونده معلومات ترلاسه کړي. د ST محصولات د ST د شرایطو او شرایطو سره سم پلورل کیږي چې د سپارلو په وخت کې شتون لري.
پیرودونکي یوازې د ST محصولاتو انتخاب ، انتخاب او کارولو لپاره مسؤل دي او ST د غوښتنلیک مرستې یا د پیرودونکو محصولاتو ډیزاین لپاره هیڅ مسؤلیت نه مني.
دلته د ST لخوا د فکري ملکیت حق ته هیڅ جواز ، څرګند یا ضمیمه ندی ورکړل شوی.
د ST محصولاتو بیا پلورل د احکامو سره توپیر لري چې دلته ښودل شوي معلومات باید د ST لخوا د ورته محصول لپاره ورکړل شوي تضمین باطل کړي.
ST او د ST لوگو د ST سوداګریزې نښې دي. د ST سوداګریزې نښې په اړه د نورو معلوماتو لپاره، مراجعه وکړئ www.st.com/trademarks. نور ټول محصول یا خدمت نومونه د دوی د اړوندو مالکینو ملکیت دی.
په دې سند کې معلومات د دې سند په هر مخکینۍ نسخه کې وړاندې شوي معلومات بدلوي او ځای په ځای کوي.
© 2024 STMicroelectronics – ټول حقونه خوندي دي

اسناد / سرچینې
 |
STMicroelectronics VL53L5CX ملټي زون د الوتنې وخت سینسر [pdf] د کارونکي لارښود VL53L5CX ملټي زون د الوتنې وخت رینګ سینسر, VL53L5CX, ملټي زون د الوتنې وخت رینګ سینسر, د الوتنې وخت رینج سینسر, د الوتنې رینګ سینسر, رینګ سینسر, سینسر |



