ലിബിയാവോ റോബോട്ടിക്സ് എയർറോബ് കൺട്രോൾ ബിൻ

സ്പെസിഫിക്കേഷനുകൾ
- മോഡൽ: എൽബിഎയർബോക്സ്
- പതിപ്പ്: V1.0
- തീയതി: ജൂൺ 2024
- നിർമ്മാതാവ്: സെജിയാങ് ലിബിയാവോ റോബോട്ടിക്സ് കമ്പനി ലിമിറ്റഡ്
- വിലാസം: നമ്പർ.96, ചാങ്ഡ റോഡ്, ലിൻപിംഗ് സ്ട്രീറ്റ്, ലിൻപിംഗ് ജില്ല, ഹാങ്ഷൗ സിറ്റി, ഷെജിയാങ് പ്രവിശ്യ, ചൈന
കഴിഞ്ഞുview
വെയർഹൗസ് ഓട്ടോമേഷൻ, വീണ്ടെടുക്കൽ സാങ്കേതികവിദ്യ എന്നിവയിൽ കമ്പനി നിക്ഷേപം വർദ്ധിപ്പിക്കുകയും ആഴത്തിലുള്ള ഗവേഷണം നടത്തുകയും ചെയ്തു, "ലി ബിയാവോ" വെയർഹൗസ് ഓട്ടോമേഷൻ, വീണ്ടെടുക്കൽ സാങ്കേതികവിദ്യ വികസിപ്പിച്ചെടുത്തു. കൺട്രോൾ ബിന്നിൽ പ്രധാനമായും ഒരു സൂപ്പർകപ്പാസിറ്റർ ബോർഡ്, ഒരു പവർ കൺട്രോൾ ബോർഡ്, ഒരു പ്രധാന കൺട്രോൾ ബോർഡ്, ഒരു ഇൻക്ലിനോമീറ്റർ, ഒരു കമ്മ്യൂണിക്കേഷൻ ആന്റിന എന്നിവ അടങ്ങിയിരിക്കുന്നു. എയർറോബ് സിസ്റ്റത്തിന്റെ പ്രധാന ഘടകങ്ങളിലൊന്നാണ് കൺട്രോൾ ബിൻ, വെയർഹൗസ് ബിന്നുകളുടെ ഓട്ടോമേറ്റഡ് സംഭരണവും വീണ്ടെടുക്കലും നേടുന്നതിനുള്ള ഒരു പ്രധാന ഉപകരണമാണിത്.
മോഡൽ നിർവ്വചനം
- നിയന്ത്രണ ബോക്സ് മോഡൽ: ബെയർബോക്സ്,
ഈ റെയിൽ മെഷീനിന്റെ കൺട്രോൾ ബോക്സ് മോഡലിന് ഈ ഓപ്പറേറ്റിംഗ് മാനുവൽ ബാധകമാണ്.
ഫീച്ചറുകൾ
- ലളിതമായ ഘടന രൂപകൽപ്പന, കുറഞ്ഞ ചെലവ്, ഇൻസ്റ്റാൾ ചെയ്യാൻ എളുപ്പമാണ്, വിന്യസിക്കാനും കഴിയും.
- വൈദ്യുതി ഉപയോഗം ഒപ്റ്റിമൈസ് ചെയ്യുക. കാര്യക്ഷമത കൺട്രോൾ ബോക്സിനുള്ളിലെ വൈദ്യുതി നിയന്ത്രണം വൈദ്യുതിയുടെ വിതരണവും സ്ഥിരതയും ഉറപ്പാക്കുന്നു, റെയിൽ മെഷീനിന്റെ എല്ലാ ഘടകങ്ങൾക്കും സ്ഥിരമായ വൈദ്യുതി വിതരണം ലഭിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുന്നു.
- യാന്ത്രിക ടിൽറ്റ് തിരുത്തൽ
മെഷീൻ ബോഡിയുടെ ടിൽറ്റ് ആംഗിൾ തത്സമയം കണ്ടെത്താൻ കഴിയുന്ന ഒരു ആന്തരിക ടിൽറ്റ് സെൻസർ റെയിൽ മെഷീനിൽ സജ്ജീകരിച്ചിരിക്കുന്നു. ടിൽറ്റ് ആംഗിളിനെ അടിസ്ഥാനമാക്കി, എല്ലായ്പ്പോഴും ലംബ വിന്യാസം നിലനിർത്തുന്നതിന് റെയിൽ മെഷീൻ യാന്ത്രികമായി സ്വയം ശരിയാക്കുന്നു.
സാങ്കേതിക പാരാമീറ്ററുകൾ
അടിസ്ഥാന സാങ്കേതിക പാരാമീറ്ററുകൾ ഇപ്രകാരമാണ്:
| വിഭാഗം | പദ്ധതി | പരാമീറ്റർ | ചിത്രീകരിക്കുക |
| മെക്കാനിക്കൽ പാരാമീറ്ററുകൾ | ഉയരം | 2500 മിമി~9000 മിമി | ഉയർന്ന ഇഷ്ടാനുസൃതമാക്കാവുന്നത് |
| വീതി | 764 മി.മീ | ||
| ആഴം | 820 മി.മീ | ||
| ഭാരം | 50 ~ 65 കിലോ | ഉയര വ്യത്യാസങ്ങളെ അടിസ്ഥാനമാക്കി | |
| ഇലക്ട്രിക്കൽ പാരാമീറ്ററുകൾ | ഓപ്പറേറ്റിംഗ് വോളിയംtage | DC25V~DC29V | |
| ഓപ്പറേറ്റിംഗ് കറൻ്റ് | 5.6A, 12A | കറന്റ് ചാർജ് ചെയ്യുന്നതിന് 12A | |
| പ്രവർത്തന ശക്തി | 150W,350W | ചാർജിംഗ് പവറിന് 350W | |
| പവർ സപ്ലൈ മോഡ് | ശുദ്ധമായ ചെമ്പ് വയർ സ്റ്റാറ്റിക് കോൺടാക്റ്റ് | ശുദ്ധമായ വെള്ളി കോൺടാക്റ്റ് ടച്ച് | |
| ആശയവിനിമയം
ഇൻ്റർഫേസുകൾ |
900M വയർലെസ്, വൈഫൈ
(2.4 ജി/5 ജി) |
||
| ഡ്രൈവിംഗ് മോഡ് | ഡിസി സെർവോ മോട്ടോർ | ||
| ചലന വേഗത | തിരശ്ചീനം (X) | വേഗത ≤ 2.0M/S,
ത്വരണം≤2.0M/s² |
|
| ലംബം (Z) | വേഗത ≤ 1.0M/S,
ത്വരണം≤0.8M/s² |
||
| ബിൻ വലിക്കുന്ന സമയം | 4.5 സെക്കൻഡ്/സമയം | ||
| ബിൻ തള്ളാൻ സമയമെടുക്കും | 4.5 സെക്കൻഡ്/സമയം | ||
| ഫീച്ചറുകൾ |
ബിൻ സ്പെസിഫിക്കേഷനുകൾ |
നീളം× വീതി: 530 മിമി ×410 മിമി |
കൈപ്പിടികൾ ഉണ്ടായിരിക്കണം
മുൻവശവും പിൻവശവും |
| പേലോഡ് | ≤30kg | ||
| ബാർകോഡ് പിന്തുണയ്ക്കുന്നു | 1D, 2D കോഡുകൾ | ||
| പാരിസ്ഥിതിക സാഹചര്യങ്ങൾ | പ്രവർത്തന താപനില | -20℃-55℃ | |
| പ്രവർത്തന ഈർപ്പം | ≤95%RH | ||
| സംഭരണ താപനില | -45℃-65℃ | ||
| സംഭരണ ഈർപ്പം | ≤90%RH | ||
| ഉയരം | ≤3000 മീറ്റർ |
നിയന്ത്രണ ബോക്സിന്റെ അടിസ്ഥാന സാങ്കേതിക പാരാമീറ്ററുകൾ
കൺട്രോൾ ബോക്സിന്റെ ഘടനയും പ്രവർത്തന തത്വവും
കൺട്രോൾ ബിന്നിന്റെ പ്രധാന ഭാഗം
പ്രധാന നിയന്ത്രണ ബിന്നിൽ പ്രധാനമായും ഒരു സൂപ്പർ കപ്പാസിറ്റർ ബോർഡ്, പവർ കൺട്രോൾ ബോർഡ്, മെയിൻ കൺട്രോൾ ബോർഡ്, ഇൻക്ലിനോമീറ്റർ, കമ്മ്യൂണിക്കേഷൻ ആന്റിന എന്നിവ ഉൾപ്പെടുന്നു, ഇത് di-യിൽ കാണിച്ചിരിക്കുന്നു. താഴെയുള്ള ഡയഗ്രം മെയിൻ കൺട്രോൾ ബിൻ ബോഡി.
മെയിൻ കൺട്രോൾ ബിൻ ബോഡി.
സൂപ്പർ കപ്പാസിറ്റർ ബോർഡ്
സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിൽ ഒരു വോൾട്ടിനുള്ളിൽ പ്രവർത്തിക്കുന്ന മൂന്ന് യൂണിറ്റുകൾ ഉൾപ്പെടുന്നു.tag21V മുതൽ 29V വരെയുള്ള e ശ്രേണി. ഈ സൂപ്പർ കപ്പാസിറ്റർ ബോർഡുകൾ സുരക്ഷിതമായ ഒരു വോള്യത്തിനുള്ളിൽ പ്രവർത്തിക്കുന്നുവെന്ന് ഉറപ്പാക്കാൻ പവർ കൺട്രോൾ ബോർഡ് അവയെ നിരീക്ഷിക്കുന്നു.tagഇ ശ്രേണി. സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിന്റെ പ്രാഥമിക പങ്ക് ഒരു ഊർജ്ജ സംഭരണ സംഭരണി പോലെയാണ്. മോട്ടോർ ഉയരുകയും ഗുരുത്വാകർഷണത്തെ മറികടക്കേണ്ടിവരുമ്പോൾ, വൈദ്യുതി ആവശ്യകത കൂടുതലായിരിക്കും. ഈ സമയത്ത്, അപര്യാപ്തമായ വൈദ്യുതി വിതരണം കാരണം മോട്ടോർ നിർത്തുകയോ വീഴുകയോ ചെയ്യുന്നത് തടയാൻ സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിന് അധിക പവർ സപ്പോർട്ട് നൽകാൻ കഴിയും. സാധാരണ പ്രവർത്തന സമയത്ത് സൂപ്പർ കപ്പാസിറ്റർ ബോർഡ് പൂർണ്ണമായും ചാർജ് ചെയ്ത നിലയിൽ തുടരുന്നു, മോട്ടോറിന് ആവശ്യമുള്ളപ്പോൾ വേഗത്തിൽ ഊർജ്ജം പുറത്തുവിടാൻ തയ്യാറാണ്. മോട്ടോർ ഇറക്കുമ്പോൾ, ഗുരുത്വാകർഷണത്തിന്റെ സഹായത്തോടെ വൈദ്യുതി ആവശ്യകത കുറയുന്നു. ഊർജ്ജ വീണ്ടെടുക്കൽ സംവിധാനം വഴി മോട്ടോർ ഇറക്കുമ്പോൾ ഉൽപ്പാദിപ്പിക്കുന്ന അധിക ഊർജ്ജം സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിന് വീണ്ടെടുക്കാനും സംഭരിക്കാനും കഴിയും. ഈ രീതി ഊർജ്ജ ഉപയോഗ കാര്യക്ഷമത മെച്ചപ്പെടുത്തുക മാത്രമല്ല, ബാഹ്യ വൈദ്യുതി സ്രോതസ്സുകളെ ആശ്രയിക്കുന്നത് കുറയ്ക്കുകയും ചെയ്യുന്നു. ഓരോ സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിലും ഒരു ബാറ്ററി മാനേജ്മെന്റ് ചിപ്പ് സജ്ജീകരിച്ചിരിക്കുന്നു, അത് തത്സമയം ചാർജിംഗിന്റെയും ഡിസ്ചാർജിംഗിന്റെയും അവസ്ഥ നിരീക്ഷിക്കുന്നു. ചാർജിംഗ്, ഡിസ്ചാർജിംഗ് പ്രക്രിയകൾ സാധാരണമാണോ എന്ന് ബാറ്ററി മാനേജ്മെന്റ് ചിപ്പിന് കണ്ടെത്താൻ കഴിയും, കൂടാതെ എന്തെങ്കിലും അസാധാരണതകൾ കണ്ടെത്തിയാൽ, സിസ്റ്റം സുരക്ഷ ഉറപ്പാക്കാൻ ചാർജിംഗ്, ഡിസ്ചാർജിംഗ് സർക്യൂട്ടുകൾ ഉടനടി ഷട്ട്ഡൗൺ ചെയ്യാൻ ഇതിന് കഴിയും. ഈ നിരീക്ഷണ, മാനേജ്മെന്റ് സംവിധാനം സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിന്റെ വിശ്വാസ്യതയും ദീർഘായുസ്സും ഉറപ്പാക്കുന്നു. സ്ഥിരമായ വൈദ്യുതി വിതരണം ഉറപ്പാക്കാൻ സൂപ്പർ കപ്പാസിറ്റർ ബോർഡ് പവർ കൺട്രോൾ ബോർഡുമായി സംയോജിച്ച് പ്രവർത്തിക്കുന്നു. പവർ കൺട്രോൾ ബോർഡ് സൂപ്പർ കപ്പാസിറ്റർ ബോർഡിന്റെ നില തുടർച്ചയായി നിരീക്ഷിക്കുകയും സിസ്റ്റം പ്രകടനം ഒപ്റ്റിമൈസ് ചെയ്യുന്നതിനായി പവർ ഡിസ്ട്രിബ്യൂഷൻ ഡൈനാമിക് ആയി ക്രമീകരിക്കുകയും ചെയ്യുന്നു. ഇലക്ട്രിക്കൽ കൺട്രോൾ ബിൻ മോട്ടോറിനുള്ള അടിസ്ഥാന പവർ സപ്ലൈ നൽകുന്നു, കൂടാതെ കൺട്രോൾ ബിന്നിന് മോട്ടോറിന്റെ ആവശ്യം നിറവേറ്റാൻ കഴിയാത്തപ്പോൾ, സൂപ്പർ കപ്പാസിറ്റർ ബോർഡ് അധിക പിന്തുണ നൽകുന്നു. വിവിധ പ്രവർത്തന സാഹചര്യങ്ങളിൽ മോട്ടോറിന് മതിയായ പവർ സപ്പോർട്ട് ലഭിക്കുന്നുണ്ടെന്ന് ഈ ഇടപെടൽ ഉറപ്പാക്കുന്നു.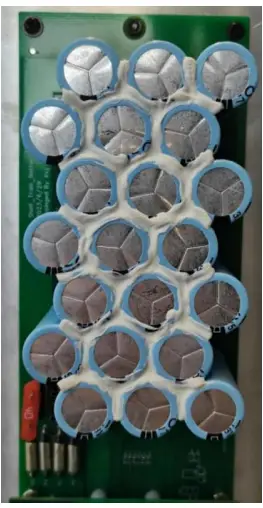 പി. പവർ കൺട്രോൾ ബോർഡ്.
പി. പവർ കൺട്രോൾ ബോർഡ്.
പെരിഫറൽ ഉപകരണങ്ങൾക്ക് ചാർജ് ചെയ്യുന്നതിനും വൈദ്യുതി വിതരണം ചെയ്യുന്നതിനും പവർ കൺട്രോൾ ബോർഡാണ് ഉത്തരവാദി. റെയിൽ മെഷീൻ സിസ്റ്റത്തിന്റെ കോർ പവർ കൺട്രോളറാണിത്, മുഴുവൻ സിസ്റ്റത്തിന്റെയും പവർ സപ്ലൈ കൈകാര്യം ചെയ്യുന്നു. റെയിൽ മെഷീനിന്റെ എല്ലാ ഘടകങ്ങൾക്കും സ്ഥിരമായ ഒരു പവർ സപ്ലൈ ലഭിക്കുന്നുണ്ടെന്ന് ഇത് ഉറപ്പാക്കുന്നു. വോൾട്ട് പോലുള്ള പാരാമീറ്ററുകൾ ഉൾപ്പെടെ പവർ കൺട്രോൾ ബോർഡ് പവർ സ്റ്റാറ്റസ് തുടർച്ചയായി നിരീക്ഷിക്കുന്നു.tagഇ, കറന്റ് എന്നിവ. നിരീക്ഷണത്തിലൂടെ, വൈദ്യുതി അസാധാരണതകൾ ഉടനടി കണ്ടെത്താനും, റെയിൽ മെഷീനിന്റെ സാധാരണ പ്രവർത്തനത്തെ ബാധിക്കുന്ന വൈദ്യുതി പ്രശ്നങ്ങൾ തടയാനും ഇതിന് കഴിയും. വൈദ്യുതി വിതരണത്തിനും മാനേജ്മെന്റിനും പവർ കൺട്രോൾ ബോർഡിന് ഉത്തരവാദിത്തമുണ്ട്, വിവിധ ഘടകങ്ങളുടെ വൈദ്യുതി ആവശ്യങ്ങൾ ന്യായമായി നിറവേറ്റുന്നുണ്ടെന്ന് ഉറപ്പാക്കുന്നു. വ്യത്യസ്ത ഘടകങ്ങളുടെ ആവശ്യങ്ങൾക്കനുസരിച്ച് വൈദ്യുതി വിതരണം ചലനാത്മകമായി ക്രമീകരിക്കാനും വൈദ്യുതി ഉപയോഗ കാര്യക്ഷമത ഒപ്റ്റിമൈസ് ചെയ്യാനും ഇതിന് കഴിയും. പവർ കൺട്രോൾ ബോർഡ് മോട്ടോറിലേക്കുള്ള വൈദ്യുതി വിതരണം നേരിട്ട് നിയന്ത്രിക്കുന്നു, മോട്ടോറിന് സ്ഥിരമായ വൈദ്യുതി പിന്തുണ ലഭിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുന്നു. പവർ പ്രശ്നങ്ങൾ മൂലമുള്ള മോട്ടോർ പരാജയങ്ങൾ തടയുന്നതിന് ഇത് മോട്ടോറിന്റെ പവർ സ്റ്റാറ്റസ് നിരീക്ഷിക്കുന്നു. ഘടകങ്ങളിൽ, പവർ കൺട്രോൾ ബോർഡിലെ CAN ഇന്റർഫേസ് റെയിൽ മെഷീൻ സിസ്റ്റത്തിൽ വളരെ സാധാരണമാണ് കൂടാതെ ഒരു പ്രധാന സംയോജിത പങ്ക് വഹിക്കുന്നു. ഇത് സിസ്റ്റത്തിന്റെ പവർ, കമ്മ്യൂണിക്കേഷൻ വയറിംഗ് ലളിതമാക്കുന്നു, സിസ്റ്റം വിശ്വാസ്യതയും പരിപാലനക്ഷമതയും വർദ്ധിപ്പിക്കുന്നു. CAN ഇന്റർഫേസിലെ രണ്ട് പവർ ലൈനുകൾ പവർ കൺട്രോൾ പ്രവർത്തനങ്ങൾ നൽകുന്നതിനും വൈദ്യുതി വിതരണവും സ്ഥിരതയും ഉറപ്പാക്കുന്നതിനും ഉത്തരവാദികളാണ്. CAN ഇന്റർഫേസിലെ രണ്ട് കമ്മ്യൂണിക്കേഷൻ ലൈനുകൾ ഡാറ്റ ട്രാൻസ്മിഷന് ഉത്തരവാദികളാണ്, സിസ്റ്റത്തിനുള്ളിലെ വിവിധ ഘടകങ്ങൾ തമ്മിലുള്ള വിവര കൈമാറ്റം സുഗമമാക്കുന്നു. CAN ആശയവിനിമയത്തിലൂടെ, പവർ കൺട്രോൾ ബോർഡിന് തത്സമയം മറ്റ് സിസ്റ്റം ഘടകങ്ങളുമായി സംവദിക്കാൻ കഴിയും, സിസ്റ്റത്തിന്റെ ഏകോപിത പ്രവർത്തനം ഉറപ്പാക്കുന്നു.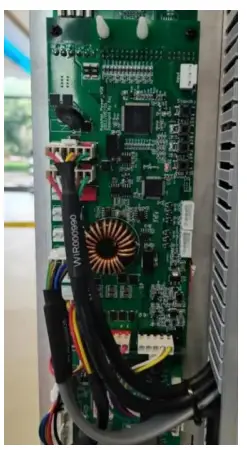
പ്രധാന നിയന്ത്രണ ബോർഡ്
റെയിൽ മെഷീനിന്റെ മുഴുവൻ പ്രവർത്തനവും നിയന്ത്രിക്കുന്നത് പ്രധാന നിയന്ത്രണ ബോർഡാണ്. റെയിൽ മെഷീനിന്റെ എല്ലാ ലോജിക്കൽ നിയന്ത്രണവും ബാഹ്യ ആശയവിനിമയങ്ങളും ആന്തരിക കണക്ഷനുകളിലൂടെയാണ് നേടിയെടുക്കുന്നത്, ബാഹ്യ കണക്ഷൻ വയറുകളൊന്നുമില്ല. പ്രധാന നിയന്ത്രണ ബോർഡിലെ മൊഡ്യൂളുകളെ ഒരു വൈഫൈ മൊഡ്യൂൾ, 900 MHz കമ്മ്യൂണിക്കേഷൻ മൊഡ്യൂൾ എന്നിങ്ങനെ തിരിച്ചിരിക്കുന്നു. ഒരു വെർച്വൽ വൈഫൈ നെറ്റ്വർക്ക് നൽകുക എന്നതാണ് വൈഫൈ മൊഡ്യൂളിന്റെ പ്രവർത്തനം. ശക്തമായ ഡാറ്റ ട്രാൻസ്മിഷൻ ശേഷിയാണ് ഇതിന്റെ സവിശേഷത, പക്ഷേ ദുർബലമായ ആന്റി-ഇടപെടൽ കഴിവാണ്. 900 MHz കമ്മ്യൂണിക്കേഷൻ മൊഡ്യൂളിന്റെ പ്രവർത്തനം 900 MHz ഫ്രീക്വൻസി ബാൻഡിൽ ആശയവിനിമയം നൽകുക എന്നതാണ്. ശക്തമായ ആന്റി-ഇടപെടൽ കഴിവാണ് ഇതിന്റെ സവിശേഷത, പക്ഷേ ഇതിന് വലിയ ഡാറ്റ ട്രാൻസ്മിഷനുകൾ കൈകാര്യം ചെയ്യാൻ കഴിയില്ല. രണ്ട് മൊഡ്യൂളുകളും വ്യത്യസ്ത ഫ്രീക്വൻസി ബാൻഡുകളിൽ (WiFi, 900 MHz) പ്രവർത്തിക്കുന്നു, പരസ്പരം പൂരകമാക്കുന്നു. പ്രവർത്തന നിയന്ത്രണത്തിലും ഡാറ്റ ശേഖരണത്തിലും പ്രധാന നിയന്ത്രണ ബോർഡ് ഒരു പങ്ക് വഹിക്കുന്നു. ഇതിന് കമാൻഡുകൾ സ്വീകരിക്കാനും ഡാറ്റ ശേഖരിക്കാനും കഴിയും, വാഹന സേവന സിസ്റ്റത്തിൽ നിന്ന് കമാൻഡുകൾ സ്വീകരിക്കാനും റഡാർ, കൺട്രോൾ മോട്ടോറുകൾ, ബാറ്ററികൾ മുതലായവ ഉൾപ്പെടെയുള്ള മറ്റ് സെൻസറുകളിൽ നിന്ന് ഡാറ്റ ശേഖരിക്കാനും കഴിയും, ഇത് സിസ്റ്റത്തിന്റെ സാധാരണ പ്രവർത്തനം ഉറപ്പാക്കുന്നു. പ്രധാന നിയന്ത്രണ ബോർഡ്.
പ്രധാന നിയന്ത്രണ ബോർഡ്.
ടിൽറ്റ് സെൻസർ
റെയിൽ മെഷീനിന്റെ പോസ്ചർ ക്രമീകരിക്കുന്നതിനാണ് ടിൽറ്റ് സെൻസർ പ്രധാനമായും ഉപയോഗിക്കുന്നത്, ഇത് റെയിലിൽ പ്രവർത്തിക്കുമ്പോൾ അത് നിവർന്നുനിൽക്കുന്നുവെന്ന് ഉറപ്പാക്കുന്നു. മുകളിലും താഴെയുമുള്ള ചക്രങ്ങൾക്കിടയിലുള്ള വേഗതയിലെ വ്യത്യാസങ്ങൾ കണ്ടെത്താനും ഇത് സഹായിക്കുന്നു, പൊരുത്തക്കേടുള്ള വേഗത കാരണം റെയിൽ മെഷീൻ ചരിയുന്നത് തടയുന്നു. തത്സമയം തുടർച്ചയായി നിരീക്ഷിച്ച് ക്രമീകരിക്കുന്നതിലൂടെ, ടിൽറ്റ് സെൻസർ എല്ലാ ചക്രങ്ങളും സിൻക്രണസ് ആയി പ്രവർത്തിക്കുന്നുവെന്ന് ഉറപ്പാക്കുന്നു, ഇത് റെയിൽ മെഷീനിന്റെ ബാലൻസ് നിലനിർത്തുന്നു. ടിൽറ്റ് സെൻസർ റെയിൽ മെഷീനിന്റെ പോസ്ചറിലെ മാറ്റങ്ങൾ തുടർച്ചയായി നിരീക്ഷിക്കുകയും നിയന്ത്രണ സിസ്റ്റത്തിന് ഫീഡ്ബാക്ക് ഡാറ്റ നൽകുകയും ചെയ്യുന്നു. ടിൽറ്റ് സെൻസറിൽ നിന്നുള്ള ഡാറ്റയെ അടിസ്ഥാനമാക്കി, നിയന്ത്രണ സിസ്റ്റം റെയിൽ മെഷീൻ അതിന്റെ പ്രവർത്തനത്തിലുടനീളം സ്ഥിരത പുലർത്തുന്നുവെന്ന് ഉറപ്പാക്കാൻ ആവശ്യമായ ക്രമീകരണങ്ങൾ ചെയ്യുന്നു, ഒരു ടിൽറ്റിംഗോ വ്യതിയാനമോ ഇല്ലാതെ. 
ഇലക്ട്രിക്കൽ തത്വങ്ങൾ (വയറിംഗ്)
ഇലക്ട്രിക്കൽ (വയറിംഗ്) സ്കീമാറ്റിക് ഇലക്ട്രിക്കൽ (വയറിംഗ്) സ്കീമാറ്റിക് ഡയഗ്രം
ഇലക്ട്രിക്കൽ (വയറിംഗ്) സ്കീമാറ്റിക് ഡയഗ്രം
ഉപകരണവും വിലാസവും
| സീരിയൽ
നമ്പർ |
പേര് | ചിത്രീകരിക്കുക |
| 1 | പ്രധാന ബോർഡ് | സെർവർ ആശയവിനിമയ വിലാസം |
| 2 | വൈദ്യുതി ബോർഡ് | CAN ആശയവിനിമയ വിലാസം |
| 3 | ടിൽറ്റ് സെൻസർ |
പട്ടിക 4. നിയന്ത്രണ ബോക്സ് ഉപകരണങ്ങളും ആശയവിനിമയ വിലാസങ്ങളും
പ്രവർത്തന വോള്യംtagകൺട്രോൾ ബോക്സിന്റെ e DC 27V ആണ് (നാമമാത്ര വോള്യംtage, യഥാർത്ഥ ശ്രേണി DC 25V – DC 29V). ആശയവിനിമയ ഇന്റർഫേസുകൾ 900M വയർലെസ് ആശയവിനിമയവും വൈഫൈയും (2.4G/5G) ഉപയോഗിക്കുന്നു. പ്രധാന നിയന്ത്രണ ബോർഡും ഉപകരണവും തമ്മിലുള്ള ആശയവിനിമയം CAN ബസ് വഴിയാണ്.
CAN-പ്ലസ് ഇന്റർഫേസ്
CAN-Plus ഇന്റർഫേസ് സ്റ്റാൻഡേർഡ് CAN ബസിനെ അടിസ്ഥാനമാക്കിയുള്ളതാണ്, കൂടാതെ 2P പവർ സപ്ലൈ ചേർക്കുന്നു, അതായത്, VH-4+VH-2.
- DC27V+
- CAN-H
- DC27V-
- CAN-L
- DC27V+
- DC27V

CAN-Plus ഇന്റർഫേസ് നിർവചനം
ഇൻസ്റ്റാളേഷനും ഡീബഗ്ഗിംഗും
ഇൻസ്റ്റലേഷൻ
താഴെയുള്ള ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, പൂർത്തിയായ സർക്യൂട്ട് ബോർഡ് സർക്യൂട്ട് ബോർഡ് ബ്രാക്കറ്റിലേക്ക് സുരക്ഷിതമായി ഘടിപ്പിക്കുന്നതിന് M36+6 ഹെക്സ് സ്റ്റാൻഡ്ഓഫുകൾ, M311+6 ഹെക്സ് സ്റ്റാൻഡ്ഓഫുകൾ, M3*5 പാൻ ഹെഡ് സ്ക്രൂകൾ എന്നിവ ഉപയോഗിക്കുക.
 സർക്യൂട്ട് ബോർഡ് ഇൻസ്റ്റലേഷൻ ഡയഗ്രം. രണ്ട് തരം ഹെക്സ് സ്റ്റാൻഡ്ഓഫുകളുടെ ഉപയോഗ സ്ഥാനങ്ങൾ ശ്രദ്ധിക്കുക; ടിൽറ്റ് സെൻസർ ബോർഡിൽ WIR000617 കേബിൾ മുൻകൂട്ടി ചേർത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സർക്യൂട്ട് ബോർഡിലെ ഓരോ ടെർമിനലിന്റെയും കണക്ഷൻ സ്ഥാനങ്ങൾക്കായി, താഴെയുള്ള ഡയഗ്രം കാണുക.
സർക്യൂട്ട് ബോർഡ് ഇൻസ്റ്റലേഷൻ ഡയഗ്രം. രണ്ട് തരം ഹെക്സ് സ്റ്റാൻഡ്ഓഫുകളുടെ ഉപയോഗ സ്ഥാനങ്ങൾ ശ്രദ്ധിക്കുക; ടിൽറ്റ് സെൻസർ ബോർഡിൽ WIR000617 കേബിൾ മുൻകൂട്ടി ചേർത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സർക്യൂട്ട് ബോർഡിലെ ഓരോ ടെർമിനലിന്റെയും കണക്ഷൻ സ്ഥാനങ്ങൾക്കായി, താഴെയുള്ള ഡയഗ്രം കാണുക.  സർക്യൂട്ട് ബോർഡ് കണക്ഷൻ ഡയഗ്രം
സർക്യൂട്ട് ബോർഡ് കണക്ഷൻ ഡയഗ്രം
ഡീബഗ്ഗിംഗ്
പവർ ചെയ്യുന്നതിനുമുമ്പ് പരിശോധിക്കുക
കൺട്രോൾ ബോക്സ് ഓൺ ചെയ്യുന്നതിനുമുമ്പ്, സമഗ്രമായ ഒരു പരിശോധന നടത്തണം. എല്ലാ ഘടകങ്ങളും ഇൻസ്റ്റാൾ ചെയ്തിട്ടുണ്ടോ, ഏതെങ്കിലും സ്ക്രൂകൾ നഷ്ടപ്പെട്ടിട്ടുണ്ടോ അല്ലെങ്കിൽ ശരിയായി മുറുക്കിയിട്ടില്ലേ എന്ന് പരിശോധിക്കുന്നത് ഇതിൽ ഉൾപ്പെടുന്നു; കൂടാതെ, വയറിംഗ് ശരിയാണോ എന്നും കേബിളുകൾ സിപ്പ് ടൈകൾ ഉപയോഗിച്ച് ശരിയായി ഉറപ്പിച്ചിട്ടുണ്ടോ എന്നും പരിശോധിക്കുക, ഒടുവിൽ, DC 27V കണക്ഷനുകൾക്കിടയിൽ ഒരു ഷോർട്ട് സർക്യൂട്ട് ഉണ്ടോ എന്ന് അളക്കാൻ ഒരു മൾട്ടിമീറ്റർ ഉപയോഗിക്കുക.
ഉപകരണങ്ങൾ ഓൺ ചെയ്യുന്നു
കൺട്രോൾ ബോക്സിലെ എല്ലാ ഉപകരണങ്ങളും സെൻസറുകളും ഓണാക്കി സാധാരണയായി പ്രവർത്തിക്കുന്നുണ്ടോ എന്ന് നിരീക്ഷിക്കുക (LED ഇൻഡിക്കേറ്ററുകളുടെ സ്റ്റാറ്റസ് വഴി ഇത് പരിശോധിക്കാവുന്നതാണ്). പ്രധാന കൺട്രോൾ ബോർഡ് ഒഴികെയുള്ള എല്ലാ ഉപകരണങ്ങളിലും അവ സാധാരണയായി പ്രവർത്തിക്കുന്നുണ്ടെങ്കിൽ അവയുടെ LED ഇൻഡിക്കേറ്ററുകൾ വേഗത്തിൽ മിന്നുന്നുണ്ടാകണം. LED-കൾ സാവധാനത്തിൽ മിന്നുന്നുണ്ടെങ്കിൽ, CAN ബസിന്റെ CAN-H, CAN-L കണക്ഷനുകൾ ശരിയാണോ എന്ന് പരിശോധിക്കുക.
പ്രധാന നിയന്ത്രണ ബോർഡിന്റെ വിലാസം മാറ്റുന്നു
എല്ലാ ഉപകരണങ്ങളും ഓണാക്കിയ ശേഷം, യഥാർത്ഥ ഓൺ-സൈറ്റ് നെറ്റ്വർക്ക് കോൺഫിഗറേഷൻ അനുസരിച്ച് എയർബോക്സിന്റെ ഉപകരണ വിലാസം (IP) മാറ്റേണ്ടതുണ്ട്. വിലാസം മാറ്റാൻ, നിങ്ങൾക്ക് ഒരു പിസിയും ഒരു USB ടു CAN ടൂളും, എയർബോക്സിന്റെ കോൺഫിഗറേഷൻ സോഫ്റ്റ്വെയറും (RackRailTool.exe) ആവശ്യമാണ്. USB ടു CAN ടൂൾ കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിക്കുക, തുടർന്ന് റെയിൽ മെഷീനിലെ ഏതെങ്കിലും CAN ബസ് ഇന്റർഫേസുകളിലേക്ക് (VH-4) പ്ലഗ് ചെയ്ത് കോൺഫിഗറേഷൻ സോഫ്റ്റ്വെയർ തുറക്കുക:  അടിസ്ഥാന പാരാമീറ്റർ മാറ്റ ഇന്റർഫേസ്.
അടിസ്ഥാന പാരാമീറ്റർ മാറ്റ ഇന്റർഫേസ്.
- കണക്ഷൻ ആരംഭിക്കാൻ USB2CAN തിരഞ്ഞെടുക്കുക. സാധാരണ കണക്ഷനുശേഷം, CAN ബസ് സ്റ്റാറ്റസും AirRob സ്റ്റാറ്റസും ഓൺലൈനിൽ പ്രദർശിപ്പിക്കും.
- നിങ്ങൾ മാറ്റാൻ ആഗ്രഹിക്കുന്ന പാരാമീറ്ററുകൾ തിരഞ്ഞെടുക്കുക, മാറ്റങ്ങൾ പൂർത്തിയാകുമ്പോൾ സംരക്ഷിക്കുക ക്ലിക്കുചെയ്യുക.
അടിസ്ഥാന പാരാമീറ്ററുകളുടെ പട്ടിക:
| പരാമീറ്റർ | സ്ഥിര മൂല്യം | ചിത്രീകരിക്കുക |
| കാർ നമ്പർ നൽകുക | 104101 | ഉപകരണത്തിന്റെ ഐപി വിലാസം 192.168.104.101 ആണ്. |
| ബ്രോഡ്കാസ്റ്റ് വിലാസം | 238238 | വയർലെസ് ആശയവിനിമയത്തിനുള്ള LB-AP പ്രക്ഷേപണ വിലാസം |
| ഹോം ചാനൽ | 0 | വയർലെസ് കമ്മ്യൂണിക്കേഷൻ സ്റ്റാർട്ടപ്പിനായുള്ള എൽബി-എപി ചാനൽ |
| അടിസ്ഥാന ആവൃത്തി | 902 | LB-AP വയർലെസിന്റെ ആരംഭ ആവൃത്തി
ആശയവിനിമയം |
| ആവൃത്തി
ഇടവേള |
250 | ആശയവിനിമയം നടത്തുമ്പോൾ LB-AP ഫ്രീക്വൻസി ഇടവേള
വയർലെസ് ആയി |
| പവർ ശ്രേണി | 120 | LB-AP വയർലെസ് ആശയവിനിമയത്തിന്റെ പ്രക്ഷേപണ ശക്തി |
| ലോക കോർഡിനേറ്റുകൾ-X | 0 | എയർറോബിലെ ഓർബിറ്ററിന്റെ ഡിഫോൾട്ട് X കോർഡിനേറ്റ്
സിസ്റ്റം |
| ലോകം
നിർദ്ദേശാങ്കങ്ങൾ - Y |
0 | എയർറോബിലെ ഓർബിറ്ററിന്റെ ഡിഫോൾട്ട് Y കോർഡിനേറ്റ്
സിസ്റ്റം |
| നിലത്തിന് മുകളിലുള്ള Z- അക്ഷത്തിന്റെ ഉയരം | 150 | പുഷ്-പുൾ ബിൻ മെഷീൻ ഏറ്റവും താഴ്ന്ന സ്ഥലത്ത് സ്ഥാപിക്കുമ്പോൾ, സിൻക്രണസ് ബെൽറ്റ് കൺവെയർ പ്രതലത്തിന്റെ ഉയരം നിലത്തു നിന്ന് മില്ലിമീറ്ററിൽ അളക്കുന്നു. |
| പുഷ്-പുൾ ക്യാമറ ഉയര വ്യത്യാസം | 0 | പുഷ്-പുൾ ബോക്സ് മെഷീനിന്റെ മുന്നിലേക്കും പിന്നിലേക്കും ഉള്ള ഉയര വ്യത്യാസം, മില്ലിമീറ്ററിൽ അളക്കുന്നു. |
പട്ടിക 2. അടിസ്ഥാന പാരാമീറ്ററുകളുടെ പട്ടിക
പുഷ്-പുൾ ബിൻ മെഷീൻ ഒരു വശത്തെ കോളത്തിൽ ഉറപ്പിച്ചിരിക്കുന്നതിനാൽ, പുറം വശത്തിന്റെ ഉയരം പലപ്പോഴും കോളത്തിന്റെ വശത്തേക്കാൾ അല്പം കുറവായിരിക്കും, ഇത് റിവേഴ്സ് റാക്ക് പ്രവർത്തനത്തിന്റെ ഉയരത്തിൽ നിന്ന് അല്പം വ്യതിയാനത്തിന് കാരണമാകുന്നു, കൂടാതെ ഈ ഉയര വ്യത്യാസത്തിന്റെ പാരാമീറ്റർ ശരിയാക്കാനും നഷ്ടപരിഹാരം നൽകാനും ആവശ്യമാണ്. പുഷ്-പുൾ ബിൻ മെഷീനിന്റെ മുന്നിലും പിന്നിലും ഉള്ള ഉയര വ്യത്യാസത്തിന്റെ സ്കീമാറ്റിക് ഡയഗ്രം.
പുഷ്-പുൾ ബിൻ മെഷീനിന്റെ മുന്നിലും പിന്നിലും ഉള്ള ഉയര വ്യത്യാസത്തിന്റെ സ്കീമാറ്റിക് ഡയഗ്രം.
കുറിപ്പ്: മുകളിലുള്ള പാരാമീറ്ററുകൾ സംരക്ഷിച്ച ശേഷം, പ്രാബല്യത്തിൽ വരാൻ നിങ്ങൾ പ്രധാന ബോർഡ് പുനരാരംഭിക്കേണ്ടതുണ്ട്, കൂടാതെ പുനരാരംഭിക്കുന്ന രീതി താഴെയുള്ള അനുബന്ധ വിഭാഗത്തിലേക്ക് റഫർ ചെയ്യും.
പ്രൊഫfile ഡൗൺലോഡ് ചെയ്യുക
അടിസ്ഥാന പാരാമീറ്ററുകൾക്ക് പുറമേ, നിങ്ങൾ അനുബന്ധ PCFG കോൺഫിഗറേഷനും ഡൗൺലോഡ് ചെയ്യേണ്ടതുണ്ട്. file (rackrail.pcfg). എയർറോബയറിന്റെ പ്രധാന നെറ്റ്വർക്ക് പാരാമീറ്ററുകൾ, മോട്ടോർ പാരാമീറ്ററുകൾ, റണ്ണിംഗ് സ്പീഡ്, ലിഡാർ, മറ്റ് അനുബന്ധ പൊതു പാരാമീറ്ററുകൾ എന്നിവ ഈ കോൺഫിഗറേഷനിൽ വ്യക്തമാക്കിയിരിക്കുന്നു. file.
കുറിപ്പ്: പാരാമീറ്ററുകൾ ഡൗൺലോഡ് ചെയ്ത ശേഷം, പ്രധാന നിയന്ത്രണ ബോർഡ് പുനരാരംഭിക്കേണ്ടതുണ്ട്, അങ്ങനെ അവ പ്രാബല്യത്തിൽ വരും. പുനരാരംഭിക്കുന്ന രീതിക്കായി ഇനിപ്പറയുന്ന വിഭാഗം കാണുക.
ഇൻക്ലിനേഷൻ സീറോ കാലിബ്രേഷൻ
ആദ്യമായി പവർ ഓൺ ചെയ്യുമ്പോൾ, റെയിൽ മെഷീനിന് പൂജ്യം ഇൻക്ലഷൻ കാലിബ്രേഷൻ ആവശ്യമാണ്. തിരുത്തലിന് രണ്ട് പ്രത്യേക രീതികളുണ്ട്: പ്രധാന നിയന്ത്രണ ബോർഡ് ബട്ടണുകൾ അല്ലെങ്കിൽ സെർവർ സോഫ്റ്റ്വെയറിലെ റെയിൽ മെഷീൻ ഇന്റർഫേസ് ഉപയോഗിക്കുക.
പ്രധാന ബോർഡ് ബട്ടണുകൾ
താഴെ കൊടുത്തിരിക്കുന്ന ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, പ്രധാന ബോർഡിൽ 3 ബട്ടണുകളും കമ്മ്യൂണിക്കേഷൻ ട്രാൻസ്സിവർ സൂചകങ്ങളും സജ്ജീകരിച്ചിരിക്കുന്നു.
 റെയിൽ മെഷീൻ മെയിൻ കൺട്രോൾ ബോർഡ്
റെയിൽ മെഷീൻ മെയിൻ കൺട്രോൾ ബോർഡ്
- പ്രധാന ബോർഡിലെ 1 ഉം 2 ഉം ഫംഗ്ഷൻ കീകൾക്ക് വ്യത്യസ്ത അവസ്ഥകളിൽ വ്യത്യസ്ത പ്രവർത്തനങ്ങൾ ഉണ്ട്.
- മദർബോർഡ് റീസെറ്റ് ബട്ടൺ ഉപയോഗിച്ച് പ്രധാന ബോർഡ് പുനഃസജ്ജമാക്കുകയും പുനരാരംഭിക്കുകയും ചെയ്യുന്നു.
- പ്രധാന ബോർഡിന്റെ കമ്മ്യൂണിക്കേഷൻ എൽഇഡി ഇൻഡിക്കേറ്ററും, കമ്മ്യൂണിക്കേഷൻ ട്രാൻസ്മിഷനും റിസപ്ഷനും ഒരു എൽഇഡി ഇൻഡിക്കേറ്ററുമായി യോജിക്കുന്നു.
- പ്രധാന ബോർഡിലൂടെ ടിൽറ്റ് സീറോ കാലിബ്രേഷന്റെ രീതിയും നിർദ്ദിഷ്ട ഘട്ടങ്ങളും ഇപ്രകാരമാണ്:
- കീകൾ ①ഉം②ഉം ഒരേ സമയം അമർത്തിപ്പിടിക്കുക, വിടരുത്, തുടർന്ന് ബോർഡ് പുനഃസജ്ജമാക്കാനും പുനരാരംഭിക്കാനും കീകൾ ③വീണ്ടും അമർത്തുക;
- രണ്ട് LED ഇൻഡിക്കേറ്ററുകളും 0.5 സെക്കൻഡ് നേരത്തേക്ക് സിൻക്രണസ് ആയി മിന്നുന്നത് കണ്ട ശേഷം, അത് ഓഫ് ചെയ്ത് വിടുക, തുടർന്ന് നിങ്ങൾക്ക് ടിൽറ്റ് സീറോ ലൊക്കേഷൻ ശരിയാക്കാം;
- എയർറോബിനെ റാക്ക് കോളത്തിന്റെ സമീപത്തേക്ക് തള്ളുക, റഫറൻസ് കോളം എയർറോബിനെ 90 ഡിഗ്രി ലംബമായി നേരെയാക്കുന്നു.
- തുടർന്ന് രണ്ട് LED ഇൻഡിക്കേറ്ററുകളും ഓഫാകുന്നതുവരെ ഒരേ സമയം ①ഉം ②ഉം അമർത്തുക, സംരക്ഷിച്ച ഡാറ്റയുടെ കാലിബ്രേഷൻ പൂർത്തിയാകുന്നതുവരെ.
സോഫ്റ്റ്വെയർ അപ്ഗ്രേഡ്
കൺട്രോൾ ബോക്സിലെ ഇലക്ട്രിക്കൽ കൺട്രോൾ ഉപകരണങ്ങളിൽ സൂപ്പർകപ്പാസിറ്റർ ബോർഡ്, പവർ കൺട്രോൾ ബോർഡ്, മെയിൻ കൺട്രോൾ ബോർഡ്, ഇൻക്ലേഷൻ സെൻസർ, മറ്റ് ഉപകരണങ്ങൾ എന്നിവ ഉൾപ്പെടുന്നു. അപ്ഗ്രേഡുചെയ്യാവുന്ന നിർദ്ദിഷ്ട ഉള്ളടക്കങ്ങൾ താഴെയുള്ള പട്ടികയിൽ പട്ടികപ്പെടുത്തിയിരിക്കുന്നു:
| ഉപകരണങ്ങൾ | ഉള്ളടക്കം അപ്ഗ്രേഡ് ചെയ്യുക | ചിത്രീകരിക്കുക |
| പ്രധാന ബോർഡ് | റാക്ക്റെയിൽ_xxx.up, റാക്ക്റെയിൽ_xxx.pcfg | മുകൾഭാഗം file എൻക്രിപ്റ്റ് ചെയ്ത പ്രോഗ്രാം ആണോ? file ഉപകരണത്തിന്റെയും,
പിസിഎഫ്ജി file ആണ് കോൺഫിഗറേഷൻ file പ്രധാന ബോർഡിന്റെ. |
| വൈദ്യുതി ബോർഡ് | ട്രാക്ക്പവർ_xxx.up | |
| ടിൽറ്റ് സെൻസർ | എൽബിആർക്റെയിൽഗൈറോഎസി_എക്സ്എക്സ്.അപ് |
ഉപകരണ നവീകരണം files
നവീകരണം fileമുകളിലുള്ള പട്ടികയിൽ പട്ടികപ്പെടുത്തിയിരിക്കുന്നവ പ്രാദേശികമായോ വിദൂരമായോ അപ്ഗ്രേഡ് ചെയ്യാൻ കഴിയും.
പ്രാദേശിക രീതി
ലോക്കൽ അപ്ഗ്രേഡ് രീതിക്ക് ആവശ്യമായ ഉപകരണങ്ങൾ: കമ്പ്യൂട്ടർ, ക്രമീകരിക്കാവുന്ന പവർ സപ്ലൈ, യുഎസ്ബി ടു കാൻ ടൂൾ, കണക്റ്റിംഗ് കേബിളുകൾ, ടൂൾ സോഫ്റ്റ്വെയർ മുതലായവ. അപ്ഗ്രേഡ് ടൂൾ
അപ്ഗ്രേഡ് ടൂൾ
ലോക്കൽ അപ്ഗ്രേഡ് പ്രധാനമായും യുഎസ്ബി ടു കാൻ ടൂൾ ഉപയോഗിച്ച് ഡൗൺലോഡ് ചെയ്യുക എന്നതാണ്. fileഉപകരണത്തിന്റെ CAN ബസ് ഇന്റർഫേസിലൂടെയും അനുബന്ധ ടൂൾ സോഫ്റ്റ്വെയറിലൂടെയും ഉപകരണത്തിന്റെ സ്റ്റോറേജ് ഫ്ലാഷിലേക്ക് s അല്ലെങ്കിൽ മറ്റ് ഡാറ്റ. ഉപകരണങ്ങളിൽ ഇവ ഉൾപ്പെടുന്നു:
- ഉപകരണ രജിസ്ട്രേഷൻ സോഫ്റ്റ്വെയർ (dev_register.exe)

- ഡൗൺലോഡ് ടൂൾ കോൺഫിഗർ ചെയ്യുക (LBRobotConfigTool.
"UP" പ്രോഗ്രാം അപ്ഗ്രേഡ് ചെയ്യാൻ ഉപകരണ രജിസ്ട്രേഷൻ സോഫ്റ്റ്വെയർ ഉപയോഗിക്കുന്നു. file, കൂടാതെ PCFG കോൺഫിഗറേഷൻ ഡൗൺലോഡ് ചെയ്യാൻ കോൺഫിഗറേഷൻ ഡൗൺലോഡ് ടൂൾ ഉപയോഗിക്കുന്നു. file.
പ്രധാന ബോർഡ്
പ്രധാന ബോർഡിന്റെ അപ്ഗ്രേഡിൽ രണ്ട് തരങ്ങൾ ഉൾപ്പെടുന്നു: “UP” പ്രോഗ്രാം file കൂടാതെ pcfg കോൺഫിഗറേഷനും file.
അപ്പ് പ്രോഗ്രാം file
അപ്ഗ്രേഡ് ചെയ്യുന്നതിന് file UP പ്രോഗ്രാമിന്റെ, നിങ്ങൾ ഉപകരണ രജിസ്ട്രേഷൻ സോഫ്റ്റ്വെയർ (dev_register.exe) ഉപയോഗിക്കേണ്ടതുണ്ട്, ഉപകരണം ബന്ധിപ്പിക്കുക, ഉപകരണം തുറക്കുക, അനുബന്ധ UP തിരഞ്ഞെടുക്കുക file, അപ്ഡേറ്റ് പ്രോഗ്രാമിൽ ക്ലിക്ക് ചെയ്യുക. അപ്പ് പ്രോഗ്രാം file ഡൗൺലോഡ് ചെയ്യുക
അപ്പ് പ്രോഗ്രാം file ഡൗൺലോഡ് ചെയ്യുക
ഉപകരണം ഒരു ഉപകരണം കണ്ടെത്തി ഉപകരണത്തിലേക്ക് UP ഡാറ്റ ഡൗൺലോഡ് ചെയ്യാൻ തുടങ്ങും, പുരോഗതി 100.0% പൂർത്തിയാകുമ്പോൾ, അപ്ഗ്രേഡ് പൂർത്തിയാകും.
pcfg കോൺഫിഗറേഷൻ file
പ്രധാന ബോർഡിന് ഒരു PCFG കോൺഫിഗറേഷനും ഉണ്ട്. file (എയർറോബിന്റെ പൊതുവായ കോൺഫിഗറേഷൻ പാരാമീറ്ററുകൾ) അപ്ഡേറ്റ് ചെയ്യേണ്ടതുണ്ട്, കൂടാതെ ടൂൾ സോഫ്റ്റ്വെയർ വഴി കൺട്രോൾ ബോർഡിലേക്ക് ഡൗൺലോഡ് ചെയ്യാനും കഴിയും. പിസിഎഫ്ജി കോൺഫിഗറേഷൻ file ഡൗൺലോഡ് ചെയ്യുക
പിസിഎഫ്ജി കോൺഫിഗറേഷൻ file ഡൗൺലോഡ് ചെയ്യുക
റെയിൽ മെഷീൻ (0x30) ആയി ഉപകരണ തരം തിരഞ്ഞെടുക്കുക. കോൺഫിഗറേഷൻ സമയത്ത് file ഡൗൺലോഡ് പ്രക്രിയ പൂർത്തിയായ ശേഷം, "ഡൗൺലോഡ് പരാജയപ്പെട്ടു" എന്ന് പ്രദർശിപ്പിക്കപ്പെടാനുള്ള ഒരു നിശ്ചിത സാധ്യതയുണ്ട്. ഈ സാഹചര്യത്തിൽ, ഡൗൺലോഡ് വിജയകരമാണെന്ന് ഉറപ്പാക്കാൻ ഡൗൺലോഡ് "100.0% വിജയം" എന്ന് കാണിക്കുന്നതുവരെ "എഴുതുക" ക്ലിക്ക് ചെയ്യുക.
വൈദ്യുതി ബോർഡ്
പവർ ബോർഡിനുള്ള ലോക്കൽ അപ്ഗ്രേഡ് രീതി പ്രധാന നിയന്ത്രണ ബോർഡിനുള്ള യുപി പ്രോഗ്രാം രീതിക്ക് സമാനമാണ്.
ഇൻക്ലിനോമീറ്റർ
ഇൻക്ലിനോമീറ്ററിനുള്ള ലോക്കൽ അപ്ഗ്രേഡ് രീതി പ്രധാന നിയന്ത്രണ ബോർഡിനുള്ള യുപി പ്രോഗ്രാം രീതിക്ക് സമാനമാണ്. വാല്യംtage എന്നത് DC 5V ആണ്, കൂടാതെ ഇത് ഒരു GH-4 ഇന്റർഫേസ് ഉപയോഗിക്കുന്നു.
പതിവുചോദ്യങ്ങൾ
ചോദ്യം: എയർറോബ് കൺട്രോൾ ബിൻ പുറത്ത് ഉപയോഗിക്കാമോ?
A: സഹ-ചാനൽ മൊബൈൽ സാറ്റലൈറ്റ് സിസ്റ്റങ്ങളുമായുള്ള ഇടപെടൽ കുറയ്ക്കുന്നതിന് ഇൻഡോർ ഉപയോഗത്തിനായി എയർറോബ് കൺട്രോൾ ബിൻ ശുപാർശ ചെയ്യുന്നു.
ചോദ്യം: എന്തെങ്കിലും തടസ്സം ഉണ്ടായാൽ എന്തുചെയ്യണം? ഓപ്പറേഷൻ?
A: അനാവശ്യമായ പ്രവർത്തനത്തിന് കാരണമായേക്കാവുന്ന ഇടപെടലുകൾ ഉൾപ്പെടെ, നേരിടുന്ന ഏതൊരു ഇടപെടലിനെയും ഉപകരണം അംഗീകരിക്കണം. തുടർച്ചയായ പ്രവർത്തനത്തിനുള്ള ചട്ടങ്ങൾ പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക.
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
ലിബിയാവോ റോബോട്ടിക്സ് എയർറോബ് കൺട്രോൾ ബിൻ [pdf] ഉപയോക്തൃ മാനുവൽ 2AQQMLBAIRBOX, lbairbox, എയർറോബ് കൺട്രോൾ ബിൻ, എയർറോബ്, കൺട്രോൾ ബിൻ, ബിൻ |