Libiao ROBOTICS AirRob vadības tvertne

Specifikācijas
- Modelis: LBAirBox
- Versija: V1.0
- Datums: 2024. gada jūnijs
- Ražotājs: Zhejiang Libiao Robotics Co., Ltd.
- Adrese: Nr.96, Changda Road, Linping Street, Linping rajons, Hangdžou pilsēta, Džedzjanas province, Ķīna
Beigāsview
Uzņēmums ir palielinājis investīcijas un veicis padziļinātus pētījumus noliktavu automatizācijas un izgūšanas tehnoloģijās, izstrādājot noliktavu automatizācijas un izgūšanas tehnoloģiju “Li Biao”. Vadības tvertne galvenokārt sastāv no superkondensatora plates, jaudas vadības plates, galvenās vadības plates, slīpuma mērītāja un sakaru antenas. Vadības tvertne ir viena no svarīgākajām AirRob sistēmas sastāvdaļām un galvenā ierīce noliktavu tvertņu automatizētai uzglabāšanai un izgūšanai.
Modeļa definīcija
- Vadības kārbas modelisGaisa kaste (BAirBox),
Šī lietošanas instrukcija attiecas uz šīs sliežu mašīnas vadības kārbas modeli.
Funkcijas
- Vienkārša konstrukcijas konstrukcija, zemas izmaksas, viegla uzstādīšana un izvietošana.
- Optimizēt enerģijas patēriņu. Efektivitāte Vadības blokā esošā jaudas vadība nodrošina jaudas padevi un stabilitāti, garantējot, ka visas dzelzceļa mašīnas sastāvdaļas saņem stabilu barošanas avotu.
- Automātiska slīpuma korekcija
Sliežu mašīna ir aprīkota ar iekšējo slīpuma sensoru, kas reāllaikā var noteikt mašīnas korpusa slīpuma leņķi. Pamatojoties uz slīpuma leņķi, sliežu mašīna automātiski koriģē sevi, lai visu laiku saglabātu vertikālo izlīdzinājumu.
Tehniskie parametri
Galvenie tehniskie parametri ir šādi:
| Kategorija | Projekts | Parametrs | Ilustrēt |
| Mehāniskie parametri | Augstums virs jūras līmeņa | 2500 mm ~ 9000 mm | Ļoti pielāgojama |
| Platums | 764 mm | ||
| Dziļums | 820 mm | ||
| Svars | 50-65 kg | Pamatojoties uz augstuma izmaiņām | |
| Elektriskie parametri | Darbības apjomstage | DC25V~DC29V | |
| Darba strāva | 5.6 A, 12 A | 12A uzlādes strāvai | |
| Darbības jauda | 150W, 350W | 350 W uzlādes jauda | |
| Barošanas režīms | Tīra vara stieples statiskais kontakts | Tīra sudraba kontakta pieskāriens | |
| Komunikācija
saskarnes |
900 m bezvadu, Wi-Fi
(2.4 G/5 G) |
||
| Braukšanas režīms | Līdzstrāvas servo motors | ||
| Kustības ātrums | Horizontāli (X) | Ātrums ≤ 2.0 M/S,
Paātrinājums ≤2.0M/S² |
|
| Vertikāli (Z) | Ātrums ≤ 1.0 M/S,
Paātrinājums ≤0.8M/S² |
||
| Atkritumu konteinera izvilkšanas laiks | 4.5 sekundes/laikā | ||
| Atkritumu tvertnes stumšana prasa laiku | 4.5 sekundes/laikā | ||
| Funkcijas |
Tvertnes specifikācijas |
Garums × platums: 530 mm ×410 mm |
Jābūt rokturiem
priekšējās un aizmugurējās puses |
| Lietderīgā slodze | ≤30 kg | ||
| Atbalstīts svītrkods | 1D un 2D kodi | ||
| Vides apstākļi | Darba temperatūra | -20℃-55℃ | |
| Darba mitrums | ≤95%RH | ||
| Uzglabāšanas temperatūra | -45℃-65℃ | ||
| Uzglabāšanas mitrums | ≤90%RH | ||
| Augstums virs jūras līmeņa | ≤3000 metri |
Vadības bloka galvenie tehniskie parametri
Vadības bloka sastāvs un darbības princips
Vadības nodalījuma galvenā daļa
Galvenā vadības bloka pamatā ir superkondensatora plate, jaudas vadības plate, galvenā vadības plate, inklinometrs un sakaru antena, kā parādīts diagrammā zemāk. Galvenā vadības tvertnes korpuss.
Galvenā vadības tvertnes korpuss.
Superkondensatora plate
Superkondensatora plate sastāv no trim vienībām, kas ir sagrupētas un darbojas tilpuma ietvaros.tagdiapazons no 21 V līdz 29 V. Šīs superkondensatoru plates uzrauga jaudas vadības plate, lai nodrošinātu, ka tās darbojas droša sprieguma robežās.tage diapazons. Superkondensatora plates galvenā loma ir līdzīga enerģijas uzkrāšanas rezervuāram. Kad motors paceļas un tam ir jāpārvar gravitācija, jaudas pieprasījums ir augsts. Šajā laikā superkondensatora plate var nodrošināt papildu jaudas atbalstu, lai novērstu motora apstāšanos vai krišanu nepietiekamas barošanas avota dēļ. Superkondensatora plate normālas darbības laikā paliek pilnībā uzlādēta, gatava ātri atbrīvot enerģiju, kad motoram tā ir nepieciešama. Motora nolaišanās laikā jaudas pieprasījums ir mazāks gravitācijas palīdzības dēļ. Superkondensatora plate var atgūt un uzglabāt motora nolaišanās laikā radīto lieko enerģiju, izmantojot enerģijas atgūšanas mehānismu. Šī metode ne tikai uzlabo enerģijas izmantošanas efektivitāti, bet arī samazina atkarību no ārējiem barošanas avotiem. Katra superkondensatora plate ir aprīkota ar akumulatora pārvaldības mikroshēmu, kas reāllaikā uzrauga uzlādes un izlādes statusu. Akumulatora pārvaldības mikroshēma var noteikt, vai uzlādes un izlādes procesi ir normāli, un, ja tiek konstatētas kādas novirzes, tā var nekavējoties izslēgt uzlādes un izlādes ķēdes, lai nodrošinātu sistēmas drošību. Šis uzraudzības un pārvaldības mehānisms nodrošina superkondensatora plates uzticamību un ilgmūžību. Superkondensatora plate darbojas kopā ar barošanas vadības plati, lai nodrošinātu stabilu barošanas avotu. Jaudas vadības plate nepārtraukti uzrauga superkondensatora plates statusu un dinamiski pielāgo jaudas sadali, lai optimizētu sistēmas veiktspēju. Elektriskā vadības bloks nodrošina motora pamata barošanas avotu, un, ja vadības bloks nevar apmierināt motora pieprasījumu, superkondensatora plate piedāvā papildu atbalstu. Šī mijiedarbība nodrošina, ka motors saņem atbilstošu jaudas atbalstu dažādos darbības apstākļos.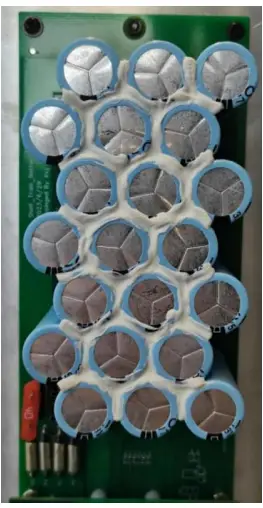 P. Jaudas vadības plate.
P. Jaudas vadības plate.
Barošanas vadības plate ir atbildīga par perifērijas ierīču uzlādi un barošanu. Tā ir dzelzceļa mašīnas sistēmas galvenais barošanas kontrolieris, kas pārvalda visas sistēmas barošanas avotu. Tā nodrošina, ka visas dzelzceļa mašīnas sastāvdaļas saņem stabilu barošanas avotu. Barošanas vadības plate nepārtraukti uzrauga barošanas statusu, tostarp tādus parametrus kā tilpumstage un strāvu. Ar uzraudzības palīdzību tā var nekavējoties noteikt jaudas anomālijas, novēršot jaudas problēmas, kas ietekmē dzelzceļa mašīnas normālu darbību. Jaudas vadības plate ir atbildīga par jaudas sadali un pārvaldību, nodrošinot, ka dažādu komponentu jaudas vajadzības tiek pienācīgi apmierinātas. Tā var dinamiski pielāgot jaudas sadali atbilstoši dažādu komponentu vajadzībām, optimizējot jaudas izmantošanas efektivitāti. Jaudas vadības plate tieši kontrolē motora barošanas avotu, nodrošinot, ka motors saņem stabilu jaudas atbalstu. Tā uzrauga motora jaudas stāvokli, lai novērstu motora atteices jaudas problēmu dēļ. Starp komponentiem CAN saskarne jaudas vadības platē ir ļoti izplatīta dzelzceļa mašīnas sistēmā un tai ir svarīga integrācijas loma. Tā vienkāršo sistēmas barošanas un sakaru vadus, uzlabojot sistēmas uzticamību un apkopi. Divas barošanas līnijas CAN saskarnē ir atbildīgas par jaudas vadības funkciju nodrošināšanu, nodrošinot barošanas avotu un stabilitāti. Divas sakaru līnijas CAN saskarnē ir atbildīgas par datu pārraidi, atvieglojot informācijas apmaiņu starp dažādiem sistēmas komponentiem. Izmantojot CAN komunikāciju, jaudas vadības plate var reāllaikā mijiedarboties ar citiem sistēmas komponentiem, nodrošinot koordinētu sistēmas darbību.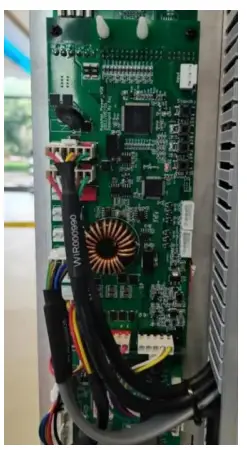
Galvenā kontroles padome
Galvenā vadības plate pārvalda visu dzelzceļa mašīnas darbību. Visa dzelzceļa mašīnas loģiskā vadība un ārējā komunikācija tiek panākta, izmantojot iekšējos savienojumus, bez ārējiem savienojuma vadiem. Galvenās vadības plates moduļi ir sadalīti WiFi modulī un 900 MHz sakaru modulī. WiFi moduļa funkcija ir nodrošināt virtuālu WiFi tīklu. Tā raksturīgā iezīme ir spēcīga datu pārraides jauda, bet vāja traucējumu novēršanas spēja. 900 MHz sakaru moduļa funkcija ir nodrošināt saziņu 900 MHz frekvenču joslā. Tā raksturīgā iezīme ir spēcīga traucējumu novēršanas spēja, taču tas nevar apstrādāt lielu datu pārraidi. Abi moduļi darbojas dažādās frekvenču joslās (WiFi un 900 MHz), viens otru papildinot. Galvenā vadības plate veic darbības vadību un datu vākšanu. Tā var saņemt komandas un apkopot datus, saņemot komandas no transportlīdzekļa servisa sistēmas un apkopojot datus no citiem sensoriem, tostarp radara, vadības motoriem, akumulatoriem utt., nodrošinot sistēmas normālu darbību. Galvenā vadības plate.
Galvenā vadības plate.
Slīpuma sensors
Slīpuma sensors galvenokārt tiek izmantots, lai pielāgotu sliežu mašīnas pozīciju, nodrošinot, ka tā paliek vertikālā stāvoklī, darbojoties uz sliedēm. Tas arī palīdz noteikt ātruma neatbilstības starp augšējiem un apakšējiem riteņiem, novēršot sliežu mašīnas sasvēršanos nevienmērīga ātruma dēļ. Nepārtraukti uzraugot un pielāgojot reāllaikā, slīpuma sensors nodrošina, ka visi riteņi darbojas sinhroni, saglabājot sliežu mašīnas līdzsvaru. Slīpuma sensors nepārtraukti uzrauga sliežu mašīnas stāvokļa izmaiņas un sniedz atgriezeniskās saites datus vadības sistēmai. Pamatojoties uz datiem no slīpuma sensora, vadības sistēma veic nepieciešamās korekcijas, lai nodrošinātu, ka sliežu mašīna visā tās darbības laikā paliek stabila bez jebkādas sasvēršanās vai novirzes. 
Elektroinstalācijas principi (elektroinstalācija)
Elektriskā (elektroinstalācijas) shēma Elektriskās (elektroinstalācijas) shematiskās diagrammas
Elektriskās (elektroinstalācijas) shematiskās diagrammas
Ierīce un adrese
| Seriāls
numuru |
Vārds | Ilustrēt |
| 1 | Galvenā padome | Servera komunikācijas adrese |
| 2 | Strāvas padome | CAN komunikācijas adrese |
| 3 | Slīpuma sensors |
4. tabula. Vadības bloka aprīkojums un sakaru adreses
Darbības sējtagVadības bloka spriegums ir 27 V līdzstrāva (nominālais spriegumstage, faktiskais diapazons DC 25V–DC 29V). Komunikācijas saskarnes izmanto 900M bezvadu sakarus un WiFi (2.4G/5G). Saziņa starp galveno vadības plati un iekārtu notiek, izmantojot CAN kopni.
CAN-Plus saskarne
CAN-Plus saskarne ir balstīta uz standarta CAN kopni un pievieno 2P barošanas avotu, tas ir, VH-4+VH-2.
- DC27V+
- CAN-H
- DC 27V-
- CAN-L
- DC27V+
- DC27V

CAN-Plus saskarnes definīcija
Instalēšana un atkļūdošana
Uzstādīšana
Kā parādīts attēlā zemāk, izmantojiet M36+6 sešstūra starplikas, M311+6 sešstūra starplikas un M3*5 skrūves ar plakanu galviņu, lai droši piestiprinātu gatavo shēmas plati pie shēmas plates kronšteina.
 Shēmas plates uzstādīšanas shēma. Pievērsiet uzmanību divu sešstūra starpliku lietošanas pozīcijām; pārliecinieties, vai WIR000617 kabelis ir iepriekš ievietots slīpuma sensora platē. Katra spailes savienojuma pozīcijas uz shēmas plates skatiet tālāk redzamajā diagrammā.
Shēmas plates uzstādīšanas shēma. Pievērsiet uzmanību divu sešstūra starpliku lietošanas pozīcijām; pārliecinieties, vai WIR000617 kabelis ir iepriekš ievietots slīpuma sensora platē. Katra spailes savienojuma pozīcijas uz shēmas plates skatiet tālāk redzamajā diagrammā.  Shēmas plates savienojuma shēma
Shēmas plates savienojuma shēma
Atkļūdošana
Pārbaudiet pirms ieslēgšanas
Pirms vadības bloka ieslēgšanas jāveic visaptveroša pārbaude. Tas ietver pārbaudi, vai visas sastāvdaļas ir uzstādītas, vai netrūkst vai nav pareizi pievilktas kādas skrūves; kā arī pārbaudi, vai elektroinstalācija ir pareiza, vai kabeļi ir pareizi nostiprināti ar savilcējiem, un visbeidzot, izmantojot multimetru, izmēriet, vai starp 27 V līdzstrāvas savienojumiem nav īssavienojuma.
Iekārtas ieslēgšana
Novērojiet, vai visas ierīces un sensori vadības blokā ir ieslēgti un darbojas normāli (to var pārbaudīt pēc LED indikatoru statusa). Visām ierīcēm, izņemot galveno vadības plati, LED indikatoriem vajadzētu ātri mirgot, ja tās darbojas normāli. Ja LED indikatori mirgo lēni, pārbaudiet, vai CAN kopnes CAN-H un CAN-L savienojumi ir pareizi.
Galvenās vadības plates adreses maiņa
Pēc tam, kad visas iekārtas ir ieslēgtas, AirBox iekārtas adrese (IP) ir jāmaina atbilstoši faktiskajai tīkla konfigurācijai uz vietas. Lai mainītu adresi, ir nepieciešams dators un USB-CAN rīks, kā arī AirBox konfigurācijas programmatūra (RackRailTool.exe). Pievienojiet USB-CAN rīku datoram, pēc tam pievienojiet to jebkurai CAN kopnes saskarnei (VH-4) uz sliežu mašīnas un atveriet konfigurācijas programmatūru:  Pamata parametru maiņas saskarne.
Pamata parametru maiņas saskarne.
- Izvēlieties USB2CAN, lai sāktu savienojumu; pēc normāla savienojuma tiešsaistē tiek parādīts gan CAN kopnes statuss, gan AirRob statuss.
- Atlasiet parametrus, kurus vēlaties mainīt, un pēc izmaiņu pabeigšanas noklikšķiniet uz Saglabāt.
Pamatparametru saraksts:
| Parametrs | Noklusējuma vērtība | Ilustrēt |
| Adresējiet automašīnas numuru | 104101 | Ierīces IP adrese ir 192.168.104.101 |
| Apraides adrese | 238238 | LB-AP apraides adrese bezvadu sakariem |
| MĀJAS kanāls | 0 | LB-AP kanāls bezvadu sakaru palaišanai |
| Pamatfrekvence | 902 | LB-AP Bezvadu savienojuma sākuma frekvence
komunikācija |
| Biežums
intervāls |
250 | LB-AP frekvences intervāls saziņas laikā
bezvadu režīmā |
| Jaudas diapazons | 120 | LB-AP Bezvadu sakaru raidīšanas jauda |
| Pasaules koordinātas-X | 0 | Orbitālā aparāta noklusējuma X koordināta AirRob vidē
sistēma |
| Pasaule
koordinātas – Y |
0 | Orbitālā aparāta noklusējuma Y koordināta AirRob ierīcē
sistēma |
| Z ass augstums virs zemes | 150 | Sinhronā lentes konveijera virsmas augstums no zemes, kad stumšanas-vilkšanas konteineru mašīna ir novietota zemākajā vietā, mērīts milimetros. |
| Push-pull kameras augstuma starpība | 0 | Stumšanas-vilkšanas kastes mašīnas augstuma starpība priekšpuses un aizmugures virzienā, mērīta milimetros. |
2. tabula. Pamatparametru saraksts
Tā kā stumšanas-vilkšanas konteinera mašīna ir fiksēta uz kolonnas vienā pusē, ārējās puses augstums bieži vien ir nedaudz zemāks nekā kolonnas puses augstums, kā rezultātā rodas neliela novirze no apgrieztās plaukta darbības augstuma, un šīs augstuma starpības parametrs ir nepieciešams, lai to labotu un kompensētu. Stumšanas-vilkšanas konteineru mašīnas priekšējās un aizmugurējās augstuma atšķirības shematiska diagramma
Stumšanas-vilkšanas konteineru mašīnas priekšējās un aizmugurējās augstuma atšķirības shematiska diagramma
Piezīme: Pēc iepriekš minēto parametru saglabāšanas, lai tie stātos spēkā, ir jārestartē galvenā plate, un restartēšanas metode ir aprakstīta atbilstošajā sadaļā zemāk.
Profile Lejupielādēt
Papildus pamatparametriem ir jālejupielādē arī atbilstošā PCFG konfigurācija. file (rackrail.pcfg). Šajā konfigurācijā ir norādīti galvenie tīkla parametri, motora parametri, darbības ātrums, lidars un citi saistītie vispārīgie AirRobare parametri. file.
Piezīme: Lai parametri stātos spēkā, pēc to lejupielādes ir jāpārstartē galvenā vadības plate. Restartēšanas metodi skatiet nākamajā sadaļā.
Slīpuma nulles kalibrēšana
Pirmo reizi ieslēdzot sliežu mašīnu, tai ir nepieciešama nulles slīpuma kalibrēšana. Korekciju var veikt divās specifiskās metodēs: izmantojot galvenās vadības plates pogas vai sliežu mašīnas saskarni servera programmatūrā.
Galvenās plates pogas
Galvenajai platei ir 3 pogas un sakaru raidītāja indikatori, kā parādīts nākamajā attēlā.
 Dzelzceļa mašīnas galvenā vadības plate
Dzelzceļa mašīnas galvenā vadības plate
- Galvenās plates funkciju taustiņiem 1 un 2 dažādos stāvokļos ir atšķirīgas funkcijas.
- Mātesplates atiestatīšanas poga tiek izmantota, lai atiestatītu un restartētu galveno plati.
- Galvenās plates komunikācijas LED indikators, kā arī komunikācijas pārraide un uztveršana atbilst LED indikatoram.
- Nulles slīpuma kalibrēšanas metode un konkrētie soļi, izmantojot galveno plati, ir šādi:
- Vienlaikus nospiediet un turiet nospiestus taustiņus ①un ②un neatlaidiet tos, pēc tam vēlreiz nospiediet taustiņus ③, lai atiestatītu un restartētu plati;
- Pēc tam, kad redzat④, ka abi LED indikatori sinhroni mirgo 0.5 sekundes, atlaidiet①un②, un pēc tam varat labot slīpuma nulles pozīciju;
- Novietojiet AirRob statīva kolonnas tuvumā, un atsauces kolonna iztaisno AirRob, līdz tas atrodas 90 grādu vertikālā leņķī.
- Pēc tam vienlaikus nospiediet ①un ②, līdz ④abi LED indikatori nodziest un saglabāto datu kalibrēšana ir pabeigta.
Programmatūras jaunināšana
Vadības bloka elektriskās vadības iekārtas ietver superkondensatora plati, jaudas vadības plati, galveno vadības plati, slīpuma sensoru un citas ierīces. Konkrētais uzlabojamo ierīču saturs ir norādīts tabulā zemāk:
| Aprīkojums | Jaunināt saturu | Ilustrēt |
| Galvenā plate | RackRail_xxx.up, RackRail_xxx.pcfg | Augšējais file ir šifrēta programma file ierīces un
PCFG file ir konfigurācija file galvenās plates. |
| Strāvas padome | TrackPower_xxx.up | |
| Slīpuma sensors | LBRackRailGyroAcc_xxx.up |
Ierīces jaunināšana files
Jauninājums fileIepriekš minētajā tabulā uzskaitītos var jaunināt lokāli vai attālināti.
Vietējā metode
Lokālās jaunināšanas metodei nepieciešamie rīki: dators, regulējams barošanas avots, USB uz CAN rīks un savienojošie kabeļi, rīka programmatūra utt. Jaunināšanas rīks
Jaunināšanas rīks
Lokālā jaunināšana galvenokārt paredzēta lejupielādei, izmantojot USB uz CAN rīku. filevai citus datus ierīces atmiņas zibatmiņā, izmantojot ierīces CAN kopnes saskarni un atbilstošo rīku programmatūru. Rīki ietver
- Ierīces reģistrācijas programmatūra (dev_register.exe)

- Konfigurējiet lejupielādes rīku (LBRobotConfigTool.
Ierīces reģistrācijas programmatūra tiek izmantota, lai jauninātu “UP” programmu. file, un PCFG konfigurācijas lejupielādei tiek izmantots konfigurācijas lejupielādes rīks. file.
Galvenā plate
Galvenās plates jaunināšana ietver divus veidus: programmu “UP” file un pcfg konfigurācija file.
augšupējā programma file
Lai uzlabotu file UP programmā jāizmanto ierīces reģistrācijas programmatūra (dev_register.exe), jāpievieno ierīce, jāatver rīks un jāizvēlas atbilstošais UP fileun noklikšķiniet uz atjaunināšanas programmas. Augšup programma file lejupielādēt
Augšup programma file lejupielādēt
Rīks atradīs ierīci un sāks lejupielādēt UP datus ierīcē; kad progress būs 100.0% pabeigts, jaunināšana būs pabeigta.
pcfg konfigurācija file
Galvenajai platei ir arī PCFG konfigurācija. file (AirRob vispārīgie konfigurācijas parametri), kas arī ir jāatjaunina un kurus var lejupielādēt vadības platē, izmantojot rīka programmatūru. PCFG konfigurācija file lejupielādēt
PCFG konfigurācija file lejupielādēt
Izvēlieties ierīces tipu kā sliedes mašīna (0x30). Konfigurēšanas laikā file Lejupielādes procesa laikā pastāv zināma varbūtība, ka var tikt parādīts ziņojums “Lejupielāde neizdevās”. Šādā gadījumā vēlreiz noklikšķiniet uz “Rakstīt”, līdz lejupielādes laikā tiek parādīts ziņojums “100.0% Success”, lai pārliecinātos, ka lejupielāde ir veiksmīga.
Strāvas padome
Strāvas plates lokālā jaunināšanas metode ir tāda pati kā galvenās vadības plates UP programmas metode.
Inklinometrs
Inklinometra lokālā jaunināšanas metode ir tāda pati kā galvenās vadības plates UP programmas metode. Tilpumstage ir līdzstrāva 5 V, un tajā tiek izmantota GH-4 saskarne.
FAQ
J: Vai AirRob vadības atkritumu tvertni var izmantot ārpus telpām?
A: AirRob vadības bloku ieteicams lietot telpās, lai samazinātu traucējumus ar līdzkanālu mobilo satelītu sistēmām.
J: Kas jādara, ja rodas traucējumi operācija?
A: Ierīcei ir jāpieņem jebkādi traucējumi, tostarp tādi, kas var izraisīt nevēlamu darbību. Lai nodrošinātu nepārtrauktu darbību, nodrošiniet atbilstību noteikumiem.
Dokumenti / Resursi
 |
Libiao ROBOTICS AirRob vadības tvertne [pdfLietotāja rokasgrāmata 2AQQMLBAIRBOX, lbairbox, AirRob vadības tvertne, AirRob, vadības tvertne, tvertne |