ម៉ូឌុលកំណត់ទីតាំង HaoruTech RTLS1

លក្ខណៈពិសេស៖
- ឈ្មោះផលិតផល៖ HR-RTLS1-PDOA
- ក្រុមហ៊ុនផលិត៖ ក្រុមហ៊ុន Haorutech អិលធីឌី
ព័ត៌មានផលិតផល៖
HR-RTLS1-PDOA គឺជាប្រព័ន្ធកំណត់ទីតាំងពេលវេលាពិតប្រាកដដែលមានភាពជាក់លាក់ខ្ពស់ដែលត្រូវបានបង្កើតឡើងដោយបច្ចេកវិទ្យាធនធានមនុស្ស។ វាគាំទ្ររបៀបកំណត់ទីតាំងពីរ៖ ពេលវេលានៃការហោះហើរ (TOF) និងការវាស់មុំនៃភាពខុសគ្នាដំណាក់កាលនៃការមកដល់ (PDOA) ។ ប្រព័ន្ធនេះអាចប្រើក្នុងរបៀបខាងក្រោម ឬរបៀបកំណត់ទីតាំងយុថ្កាតែមួយ ដែលធ្វើឱ្យវាអាចប្រើប្រាស់បានសម្រាប់សេណារីយ៉ូកម្មវិធីទីតាំងផ្សេងៗ។
លក្ខណៈប្រព័ន្ធ៖
- ទីតាំងដែលមានភាពជាក់លាក់ខ្ពស់។
- គាំទ្រការវាស់មុំ TOF និង PDOA
- ច្រើនសម្រាប់សេណារីយ៉ូកម្មវិធីផ្សេងៗ
ឧត្តមភាពផលិតផល៖
| ការប្រៀបធៀបធាតុ | HR-RTLS1-PDOA | ផលិតផលផ្សេងទៀត។ |
|---|---|---|
| បន្ទះឈីបស្នូល | ផ្អែកលើ DW3220 ចុងក្រោយបង្អស់ | ដោយផ្អែកលើដំណោះស្រាយបន្ទះឈីបតែមួយបែបប្រពៃណី inDW1000 ដំបូង |
ការណែនាំអំពីការប្រើប្រាស់ផលិតផល
ការដាក់ឱ្យប្រើប្រាស់ប្រព័ន្ធ៖
ការរៀបចំឧបករណ៍៖
ត្រូវប្រាកដថាសមាសធាតុទាំងអស់មានវត្តមាន និងស្ថិតក្នុងស្ថានភាពការងារ។
ការដំឡើងយុថ្កា PDOA៖
ដំឡើងយុថ្កា PDOA ដោយសុវត្ថិភាពនៅក្នុងទីតាំងដែលចង់បាន។
Tag ការដំឡើង៖
ភ្ជាប់ tags ដល់វត្ថុ ឬបុគ្គលដែលត្រូវការការតាមដាន។
ការដំឡើងកម្មវិធីបញ្ជា:
ដំឡើងកម្មវិធីបញ្ជាចាំបាច់នៅលើប្រព័ន្ធសម្រាប់មុខងារត្រឹមត្រូវ។
ភ្ជាប់ទៅកម្មវិធីកុំព្យូទ័រ៖
បង្កើតការតភ្ជាប់ជាមួយកម្មវិធីកុំព្យូទ័រសម្រាប់ដំណើរការទិន្នន័យ។
ការក្រិតយុថ្កា៖
នៅលើបន្ទះអេក្រង់ OLED៖
តម្រឹមយុថ្កាដោយប្រើអេក្រង់ OLED នៅលើក្តារសម្រាប់ការកំណត់ទីតាំងត្រឹមត្រូវ។
សេចក្តីផ្តើម
HR-RTLS1-PDOA គឺជាប្រព័ន្ធកំណត់ទីតាំងពេលវេលាពិតប្រាកដដែលមានភាពជាក់លាក់ខ្ពស់ (ផ្អែកលើបន្ទះឈីបស៊េរី DW3000 របស់ក្រុមហ៊ុន Decawave) ដែលបង្កើតឡើងដោយ HR Technology ។
HR-RTLS1-PDOA គាំទ្ររបៀបកំណត់ទីតាំងពីរ៖ ការវាស់មុំ TOF និង PDOA ។ វាអាចត្រូវបានអនុវត្តជាប្រព័ន្ធខាងក្រោម ឬរបៀបកំណត់ទីតាំងយុថ្កាតែមួយ។ តាមរយៈបន្សំម៉ូឌុលផ្សេងគ្នា វាអាចសម្របទៅនឹងស្ថានភាពកម្មវិធីទីតាំងភាគច្រើន។
លក្ខណៈពិសេសនៃប្រព័ន្ធ
MCU-STM32 ដ៏ពេញនិយម ងាយស្រួលសម្រាប់អ្នកចាប់ផ្តើមដំបូង៖
ម៉ូឌុល ULM1/ULM3/LD150 នៃ HR-RTLS1 យកស៊េរី STM32F103CBT6 (ឬបន្ទះឈីបជំនួសដែលត្រូវគ្នាទាំងស្រុងដែលផលិតនៅក្នុងប្រទេសចិន) ជា MCU គ្រប់គ្រងសំខាន់។
ឧបករណ៍ដែលអាចពាក់បានយកឧបករណ៍បញ្ជាមីក្រូថាមពលទាប STM32L151CBU6 ដែលត្រូវបានភ្ជាប់ដោយឧបករណ៍ CUBEmx បង្កើតឡើងដោយបណ្ណាល័យ HAL និងបរិស្ថានអភិវឌ្ឍន៍រួមបញ្ចូលគ្នា KEIL-MDK ។
ចំណុចប្រទាក់ពង្រីកងាយស្រួល៖
ម៉ូឌុលផ្ដល់នូវចំណុចប្រទាក់ទិន្នន័យពង្រីកខាងក្រៅ ដែលអាចភ្ជាប់យ៉ាងងាយស្រួលជាមួយកុំព្យូទ័រ ទូរសព្ទចល័ត មីក្រូកុងទ័រផ្សេងទៀត Raspberry PI, Arduino, PLC និងឧបករណ៍ផ្សេងទៀតសម្រាប់ការពង្រីក និងអភិវឌ្ឍន៍។
ភាពត្រឹមត្រូវនៃទីតាំងខ្ពស់៖
ប្រព័ន្ធនេះយក IC ដាក់ទីតាំងដែលមានភាពជាក់លាក់ខ្ពស់ Decawave ជាម៉ូឌុលកំណត់ទីតាំងស្នូល។ វាដំណើរការជាមួយក្បួនដោះស្រាយកំណត់ទីតាំងដែលបានអភិវឌ្ឍដោយខ្លួនឯង និងក្បួនដោះស្រាយការត្រង ដែលធ្វើឱ្យការកំណត់ទីតាំង tag ការសម្របខ្លួនទៅនឹងលក្ខខណ្ឌវាលស្មុគស្មាញផ្សេងៗ។ ភាពត្រឹមត្រូវនៃទីតាំងគឺ 10cm (CEP95);
គាំទ្រច្រើនtags និងយុថ្កាច្រើន៖
ប្រព័ន្ធនេះអាចពង្រីកចំនួនយុថ្កាបានយ៉ាងងាយស្រួល និង tags ដោយការកំណត់រចនាសម្ព័ន្ធ ដែលងាយស្រួលសម្រាប់អ្នកប្រើប្រាស់ក្នុងការពង្រីកប្រព័ន្ធ។
ក្បួនដោះស្រាយតម្រង Kalman ដែលភ្ជាប់មកជាមួយនៅក្នុងម៉ូឌុល
ក្បួនដោះស្រាយតម្រង Kalman ដែលភ្ជាប់មកជាមួយអាចត្រូវបានបើក/បិទដើម្បីធ្វើឱ្យទិន្នន័យលទ្ធផលមានស្ថេរភាព និងរលូន។
ឧត្តមភាពផលិតផល
តារាង 3-1 RTLS1-PDOA ឧត្តមភាពផលិតផល
| ការប្រៀបធៀបធាតុ | HaoruUWB | ផលិតផលផ្សេងទៀត។ |
| បន្ទះឈីបស្នូល | ផ្អែកលើ DW3220 ចុងក្រោយបង្អស់
ដំណោះស្រាយបន្ទះឈីបតែមួយ ដែលជាលើកដំបូងនៅក្នុងឧស្សាហកម្មនេះ។ |
ផ្អែកលើប្រពៃណី
DW1000 ដំណោះស្រាយ dual-chip ។ |
| សមាសធាតុនៅលើយន្តហោះ
យុថ្កា។ |
សមាសធាតុតិចជាង ងាយស្រួលដាក់បញ្ចូល។ | សមាសធាតុច្រើនទៀត ពិបាកក្នុងការបញ្ចូល។ |
| ការចំណាយសរុប | តិច | ខ្ពស់ជាង |
|
ការប្រើប្រាស់ថាមពល |
វាប្រើតែ 10% នៃថាមពល
ការប្រើប្រាស់បន្ទះឈីប DW1000 ពីរបែបប្រពៃណី។ |
ខ្ពស់។ |
| ថាតើត្រូវគ្នាជាមួយ TWR ពហុ
ទីតាំងយុថ្កា |
បាទ យុថ្កា PDOA ក៏អាចត្រូវបានប្រើជាទីតាំងត្រីភាគីផងដែរ។
យុថ្កា |
ទេ យុថ្កា PDOA អាចបំពេញមុខងាររបស់វាតែប៉ុណ្ណោះ។ |
ផលិតផលស៊េរី
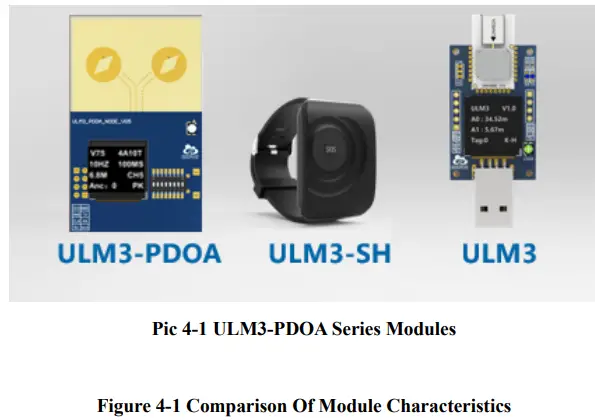
| 序号 | 型号 ម៉ូដែល | 主要特点 លក្ខណៈសំខាន់ |
| 1 | ULM3 | ម៉ូឌុល DWM3000 ផ្លូវការ ឧបករណ៍បង្ហាញ 40 ម៉ែត្រ |
| 2 | ULM3-SH | សំបកខ្សែដៃ ថ្មដែលភ្ជាប់មកជាមួយ មុខងារចាប់ចលនា ៤០
ម៉ែត្រ |
| 3 | ULM3-PDOA | យុថ្កា PDOA, មុំវាស់, ទីតាំងយុថ្កាតែមួយ, យានជំនិះ, 40 ម៉ែត្រ។ |
ដូចដែលបានបង្ហាញក្នុងរូបភាពខាងក្រោម ម៉ូឌុលស៊េរី HR-RTLS1

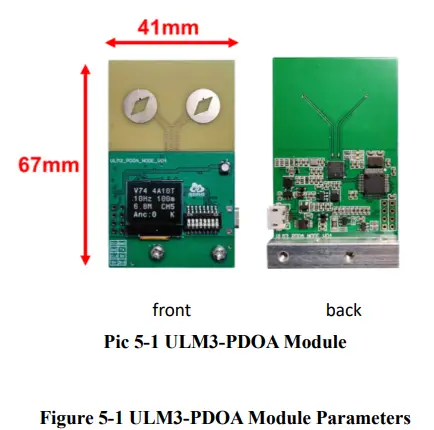
ប៉ារ៉ាម៉ែត្រប្រព័ន្ធ
ប៉ារ៉ាម៉ែត្រ ULM3-PDOA
| ប្រភេទ | ប៉ារ៉ាម៉ែត្រ |
| ថាមពល | ការផ្គត់ផ្គង់ថាមពលខាងក្រៅ DC5V |
| ជួរនៃការរកឃើញអតិបរមា | 40m (តំបន់បើកចំហ) @6.8Mbps |
| MCU | STM32F103CBT6 (GD32F103CBT6) |
| បង្ហាញនៅលើយន្តហោះ | អេក្រង់ OLED ១.៣ អ៊ីញ |
| ទំហំម៉ូឌុល | ៧៥ * ៧៥ ម។ |
| ភាពត្រឹមត្រូវនៃជួរ | ± 5 សង់ទីម៉ែត្រ |
| រកឃើញមុំ | 120 ° (កណ្តាលដោយម៉ូឌុល, -60 °
~+60°) |
| ភាពត្រឹមត្រូវនៃមុំ | ±5 |
| សីតុណ្ហភាពការងារ | -20 ~ 70 ℃ |
| របៀបទំនាក់ទំនង | USB ទៅច្រកសៀរៀល / TTL សៀរៀល |
| ប្រេកង់ធ្វើបច្ចុប្បន្នភាពទិន្នន័យ | 100Hz (MAX, លៃតម្រូវបាន) |
| ដែនប្រេកង់ | 6250-8250MHz (CH5/CH9) |
| កម្រិតបញ្ជូន | 500MHz |
| ប្រភេទនៃអង់តែន | អង់តែនពីរ PCB |
| ដង់ស៊ីតេថាមពលបញ្ចេញ
(អាចសរសេរកម្មវិធីបាន) |
-41dBm/MHz |
| អត្រាទំនាក់ទំនង | 6.8 Mbps |
ប៉ារ៉ាម៉ែត្រ ULM3

តារាង 5-2 ប៉ារ៉ាម៉ែត្រម៉ូឌុល ULM3
| ប្រភេទ | ប៉ារ៉ាម៉ែត្រ |
|
ថាមពល |
ការផ្គត់ផ្គង់ថាមពលខាងក្រៅ DC3.7V ~ 5V
(power bank ឬថ្ម li-ion) |
| ជួរនៃការរកឃើញអតិបរមា | 40m (តំបន់បើកចំហ) @6.8Mbps |
| MCU | STM32F103CBT6 (GD32F103CBT6) |
| បង្ហាញនៅលើយន្តហោះ | អេក្រង់ OLED ០.៦ អ៊ីញ |
| ទំហំម៉ូឌុល | 27 * 70mm (រួមបញ្ចូលអង់តែននិងមូលដ្ឋាន) |
| ភាពត្រឹមត្រូវនៃជួរ | ± 5 សង់ទីម៉ែត្រ |
| សីតុណ្ហភាពការងារ | -20 ~ 70 ℃ |
| របៀបទំនាក់ទំនង | USB ទៅច្រកសៀរៀល / TTL សៀរៀល |
| ប្រេកង់ធ្វើបច្ចុប្បន្នភាពទិន្នន័យ | 100Hz (MAX, លៃតម្រូវបាន) |
| ដែនប្រេកង់ | 6250-8250MHz (CH5/CH9) |
| កម្រិតបញ្ជូន | 500MHz |
| ប្រភេទនៃអង់តែន | អង់តែនសេរ៉ាមិចនៅលើក្តារ |
| ដង់ស៊ីតេថាមពលបញ្ចេញ
(អាចសរសេរកម្មវិធីបាន) |
-41dBm/MHz |
| អត្រាទំនាក់ទំនង | 6.8 Mbps |
កម្មវិធីប្រព័ន្ធ
- ទីតាំងជួរតូចនៃយុថ្កាតែមួយ;
- តាមដានអីវ៉ាន់ ឡាន ឧបករណ៍ និងប្រព័ន្ធផ្សេងៗទៀត។
- ប្រឆាំងនឹងការបាត់បង់ tag, ខ្យល់tagល។ ;
- កម្មវិធីតភ្ជាប់ចង្អុលម្រាមដៃមួយ;
ការដាក់ពង្រាយប្រព័ន្ធ
ការរៀបចំឧបករណ៍
- ម៉ូឌុល ULM3-PDOA, ULM3 មួយចំនួន tags(ឬ ULM3-ខ្សែដៃខ្នាតតូច-tags), ខ្សែ microUSB 1, រន្ធយុថ្កា 1 ។
| បញ្ជី
លេខ |
ឈ្មោះសមាសធាតុ |
| 1 | 1 ម៉ូឌុល ULM3-PDOA |
| 2 | ULM3 tags(ឬ ULM3-ខ្សែដៃខ្នាតតូច-tags) ជាច្រើនដូចជា
ត្រូវការ |
| 3 | power bank 1 ផ្គូផ្គង ULM3 tag សម្រាប់ការផ្គត់ផ្គង់ថាមពល។ |
| 4 | 1 ខ្សែ microUSB |
| 5 | អ្នកកាន់យុថ្កាចំនួន 1, វីស M4 ចំនួន 3, សសរស្ពាន់ចំនួន 2 ។ |
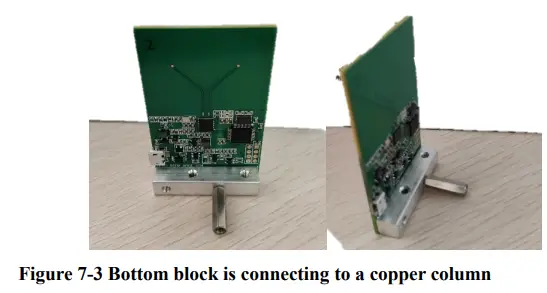
ការដំឡើងយុថ្កា PDOA
អង់តែននៃម៉ូឌុល ULM3-PDOA ត្រូវបានតម្រង់ទិសឆ្ពោះទៅរកទីតាំង tag. ម៉ូឌុលនេះត្រូវបានបំពាក់ដោយការផ្គត់ផ្គង់ថាមពល 5V ខាងក្រៅ។ មានប្លុកការ៉េដែលបានជួសជុលនៅផ្នែកខាងក្រោមនៃម៉ូឌុល ដែលអាចត្រូវបានជួសជុលនៅលើ UGV ឬផ្ទៃតុដោយប្រើវីស M3 ។ ដូចគ្នានេះផងដែរវាអាចត្រូវបានភ្ជាប់ទៅនឹងជួរឈរទង់ដែងដើម្បីបង្កើនកម្លាំងទ្រទ្រង់ដើម្បីដាក់នៅលើវេទិកាផ្ដេក។
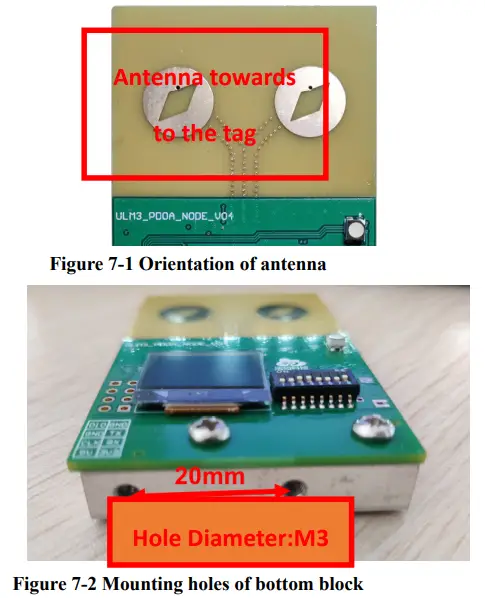
យុថ្កាត្រូវបានកំណត់ជាចំណុចកូអរដោណេ (0,0) ដើម្បីបង្កើតប្រព័ន្ធកូអរដោនេ ហើយអ័ក្ស Y គឺដោយផ្ទាល់នៅពីមុខយុថ្កា។ នេះ។ tag ការកំណត់ទីតាំងនិងការគណនា AOA អាចត្រូវបានបញ្ចប់ពី -60 °ទៅ +60 °។

បញ្ហាត្រូវការការយកចិត្តទុកដាក់៖
- នេះ។ tag គួរតែត្រូវបានដាក់នៅក្នុងជួរគ្របដណ្តប់ត្រឹមត្រូវនៃយុថ្កា បើមិនដូច្នេះទេវាអាចនឹងកើតឡើងនូវកំហុសមួយចំនួន ដូចជាការដាក់ទីតាំងមិនត្រឹមត្រូវ។
- ផ្ទៃអង់តែននៃយុថ្កាគួរតែត្រូវបានតម្រង់ទិសឆ្ពោះទៅរក tag;
- ចម្ងាយរវាងយុថ្កានិង tag គួរតែធំជាង 1 ម៉ែត្រ;
- យុថ្កាគួរតែត្រូវបានដំឡើងនៅក្នុងតំបន់បើកចំហមួយ;
- មិនគួរមានការជ្រៀតជ្រែករវាង tag និងយុថ្កា ជាពិសេសមិនមានបន្ទះដែក និងលោហៈផ្សេងទៀត។
Tag ការដំឡើង
មានចំណុចប្រទាក់ USB នៅផ្នែកខាងក្រោមនៃ ULM3 tagដែលគួរភ្ជាប់ជាមួយធនាគារសាកថ្ម ដែលផ្គត់ផ្គង់ជាមួយទំនិញ សម្រាប់ការផ្គត់ផ្គង់ថាមពល។ ខ្សែដៃខ្នាតតូច ULM3 tag មានថ្មដែលភ្ជាប់មកជាមួយ ដោយចុចប៊ូតុង SOS ឱ្យយូររយៈពេល 3 វិនាទី ដើម្បីថាមពលវាឡើង។
ការដំឡើងកម្មវិធីបញ្ជា
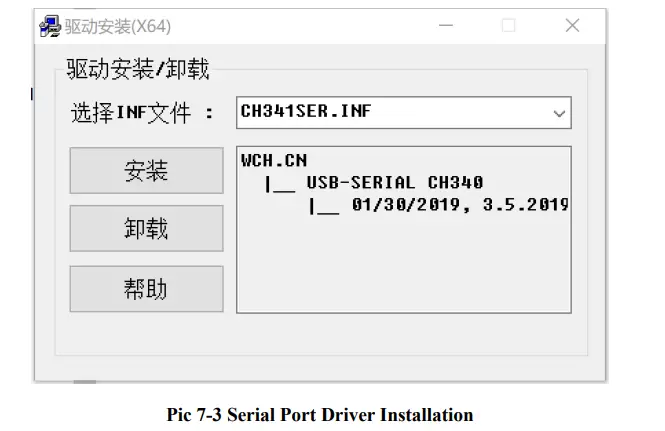
ចូលទៅកាន់ "HR-RTLS1-PDOA 开箱测试资料\串口驱动" កាតាឡុក ចុចពីរដង CH341SER.EXE ដើម្បីដំឡើងវា ប្រើការកំណត់លំនាំដើម ចុចប៊ូតុង "ដំឡើង" ធ្វើតាមប្រអប់បញ្ចូល ដើម្បីបញ្ចប់ដំណើរការដំឡើង។
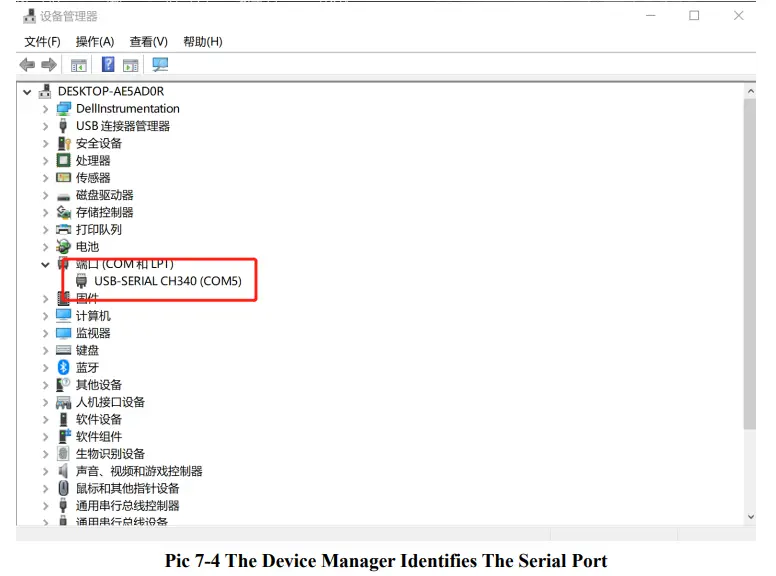
បន្ទាប់ពីដំឡើងកម្មវិធីបញ្ជា ភ្ជាប់យុថ្កា/tag ម៉ូឌុលទៅកុំព្យូទ័រ។ បើកកម្មវិធីគ្រប់គ្រងឧបករណ៍នៅលើកុំព្យូទ័រ ហើយពិនិត្យមើលថាតើកម្មវិធីបញ្ជាច្រកសៀរៀលត្រូវបានដំឡើងយ៉ាងត្រឹមត្រូវ។ ប្រសិនបើច្រកត្រូវបានកំណត់ កត់ត្រាលេខច្រកសៀរៀលនៃ CH340។ សម្រាប់អតីតample រូបភាពខាងក្រោមបង្ហាញថាកម្មវិធីបញ្ជាត្រូវបានដំឡើង ឧបករណ៍ត្រូវបានកំណត់អត្តសញ្ញាណ ហើយលេខច្រកសៀរៀលគឺ COM5។ ប្រសិនបើច្រកសៀរៀលមិនត្រូវបានបង្ហាញ ឬមាន “!” កំហុសសញ្ញាឧទាន សូមទាក់ទងវិស្វករក្រោយការលក់ដែលត្រូវគ្នា។
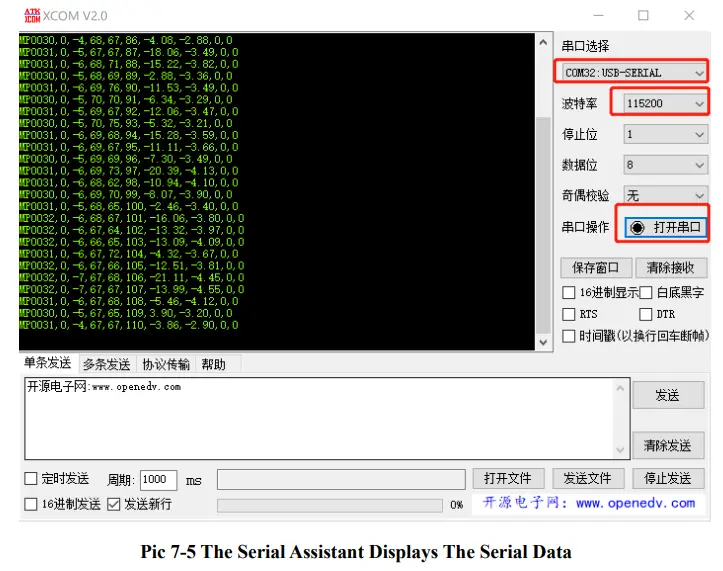
ចូលទៅកាន់ "HR-RTLS1-PDOA 开箱测试资料\串口驱动" កាតាឡុក ចុចពីរដង XCOM V2.0.exe ដើម្បីដំណើរការអ្នកជំនួយការកែកំហុសច្រកសៀរៀល ជ្រើសរើសលេខច្រកសៀរៀលដែលបានកំណត់ កំណត់អត្រា baud ទៅ 115200串口”។
រត់ tag ម៉ូឌុល ប្រសិនបើប្រអប់សារអាចទទួលទិន្នន័យខ្សែអក្សរដែលចាប់ផ្តើមដោយ MP វាមានន័យថាការទំនាក់ទំនងទិន្នន័យច្រកសៀរៀលកំពុងដំណើរការ ហើយយុថ្កាត្រូវបានភ្ជាប់ដោយជោគជ័យទៅកុំព្យូទ័រ។
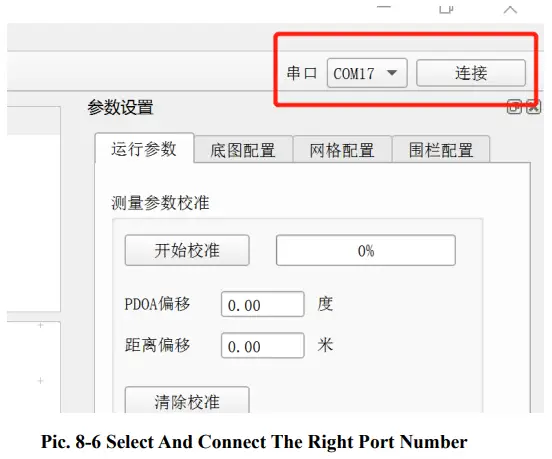
ភ្ជាប់ទៅកម្មវិធីកុំព្យូទ័រ
បើក "HR-RTLS1-PDOA 开箱测试资料\ 上位机软件" កាតាឡុក ពន្លា "HR_PDOA_RTLS.zip" ដំណើរការ HR_PDOA_RTLS.exe ឥឡូវនេះយើងអាចដំណើរការកម្មវិធីកុំព្យូទ័រ។ ជ្រើសលេខច្រកសៀរៀលត្រឹមត្រូវនៅជ្រុងខាងស្ដាំនៃកម្មវិធី ចុច "ភ្ជាប់"។
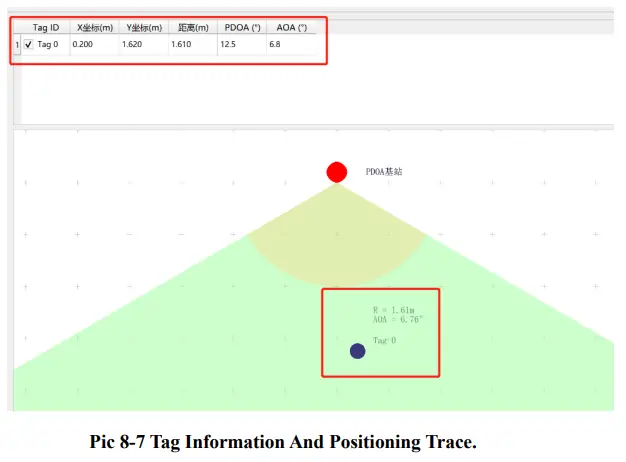
បន្ទាប់ពីបានតភ្ជាប់ទៅកុំព្យូទ័រហើយបើកកម្មវិធី tag ដោយជោគជ័យ កម្មវិធីកុំព្យូទ័រអាចបង្ហាញ tag ព័ត៌មាន និងទីតាំងដាន។
ពិធីការទំនាក់ទំនង
ពិធីការទិន្នន័យ Uplink
ពិធីការទិន្នន័យ uplink គឺជាទិន្នន័យដែលបានផ្ទុកឡើងយ៉ាងសកម្មដោយម៉ូឌុល UWB តាមរយៈច្រកសៀរៀល។
អត្រា baud ទំនាក់ទំនងសៀរៀល៖ 115200bps-8-n-1
ពិធីការទំនាក់ទំនង៖
MPxxxx,tag_id,x_cm, y_cm, ចម្ងាយ_cm, ជួរលេខ, pdoa_deg, aoa_deg, ចម្ងាយ ce_offset_cm, pdoa_offset_deg\r\n
ទិន្នន័យទំនាក់ទំនងសៀរៀល ឧampឡេ៖ MP0036,0,302,109,287,23,134.2,23.4,23,56
តារាង 8-1 ការពិពណ៌នាពិធីការទំនាក់ទំនងសៀរៀល
| មាតិកា | Example | ការពិពណ៌នា |
| MPxxxx | MP0036 | ក្បាលកញ្ចប់ទិន្នន័យ 0036 គឺជាចំនួននៃបៃទិន្នន័យទាំងអស់ លើកលែងតែ MPxxxx រួមទាំងការបញ្ចប់ \r\n ដែលត្រូវបានជួសជុលត្រឹម 4 តួអក្សរ។ ប្រសិនបើវាគឺជា
តិចជាងប្រវែង បំពេញដោយ 0 ។ |
| tag_លេខសម្គាល់ | 0 | ចរន្ត tag ID |
| x_cm | 302 | កូអរដោនេ X នៃ tag, ចំនួនគត់,
ឯកតា: សង់ទីម៉ែត្រ |
| y_cm | 109 | កូអរដោនេ Y នៃ tag, ចំនួនគត់,
ឯកតា: សង់ទីម៉ែត្រ |
| ចម្ងាយ_cm | 287 | ចម្ងាយដោយផ្ទាល់រវាងយុថ្កា
និង tag, ចំនួនគត់, ឯកតា: សង់ទីម៉ែត្រ |
| លេខជួរ | 23 | លេខស៊េរី 0-255 |
| pdoa_deg | 134.2 | តម្លៃ PDOA, អណ្តែត, ឯកតា: ដឺក្រេ |
| aoa_deg | 23.4 | តម្លៃ AOA, អណ្តែត, ឯកតា: ដឺក្រេ |
| ចម្ងាយ_offset_cm | 23 | តម្លៃក្រិតតាមខ្នាតនៃចម្ងាយផ្ទាល់
រវាងយុថ្កានិង tag, ចំនួនគត់, ឯកតា: សង់ទីម៉ែត្រ |
| pdoa_offset_deg | 56 | តម្លៃក្រិតតាមខ្នាតនៃតម្លៃ PDOA,
អណ្តែត, ឯកតា : ដឺក្រេ |
| \r\n | ទិន្នន័យបញ្ចប់ |
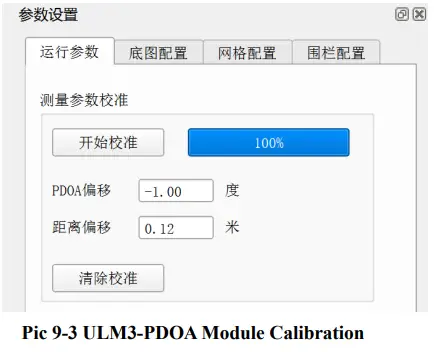
ការក្រិតយុថ្កា
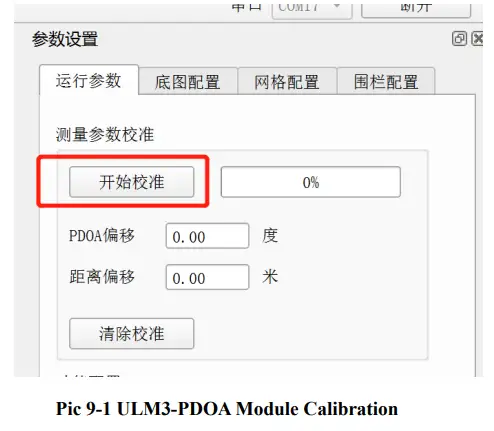
ដោយសារតែឥទ្ធិពលនៃការផ្សារ ដំណើរការផលិត PCB និងកត្តាផ្សេងៗទៀត ខ្សែបញ្ជូន RF នៃអង់តែនពីរនៃម៉ូឌុល ULM3-PDOA នឹងបង្កឱ្យមានកំហុសតូចៗ ដែលបណ្តាលឱ្យមានគម្លាត PDOA Angle ដែលអាចត្រូវបានក្រិតតាមកម្មវិធីកុំព្យូទ័រ។
បន្ទាប់ពីម៉ូឌុល ULM3-PDOA ត្រូវបានភ្ជាប់ដោយជោគជ័យទៅកុំព្យូទ័រ និង tag ទិន្នន័យទីតាំងត្រូវបានបង្ហាញ ចុចប៊ូតុង "ចាប់ផ្តើមការក្រិតតាមខ្នាត" ដាក់យុថ្កា និង tag នៅកម្ពស់ដូចគ្នាដូចដែលបានស្នើសូមដាក់ tag នៅពីមុខមជ្ឈមណ្ឌលអង់តែនពីរនៃយុថ្កា ហើយវាស់ចម្ងាយរវាងយុថ្កា និង tag. វាត្រូវបានណែនាំថាចម្ងាយគួរតែលើសពី 2 ម៉ែត្រ។
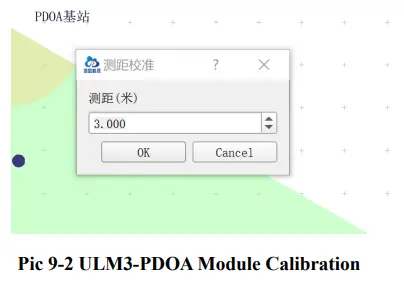
បំពេញតម្លៃចម្ងាយដែលបានវាស់ទៅក្នុងកម្មវិធី PC ហើយរក្សាទីតាំងរបស់ tag ហើយយុថ្កាមិនផ្លាស់ប្តូររហូតដល់របារវឌ្ឍនភាពនៃការក្រិតតាមខ្នាតរមៀលដល់ 100% ដែលជាពេលដែលការក្រិតតាមខ្នាតត្រូវបានបញ្ចប់។
បន្ទាប់ពីការក្រិតតាមខ្នាតត្រូវបានបញ្ចប់ កម្មវិធីកុំព្យូទ័រជំរុញឱ្យមានគម្លាតការក្រិតតាមខ្នាត ហើយយុថ្កានឹងបញ្ចេញទិន្នន័យការក្រិតតាមគម្លាតនេះ។ ប្រសិនបើអ្នកត្រូវការសម្អាតទិន្នន័យក្រិតតាមខ្នាត អ្នកអាចចុចប៊ូតុង "ជម្រះការក្រិតតាមខ្នាត" ដើម្បីកំណត់តម្លៃគម្លាតឡើងវិញ និងធ្វើការក្រិតតាមខ្នាតឡើងវិញ។
នៅលើបន្ទះអេក្រង់ OLED
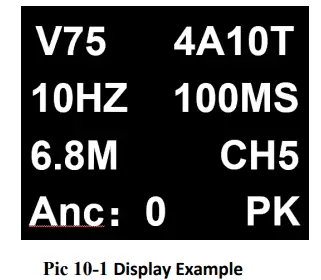
រូបភាពទី 10-1 ការពិពណ៌នាព័ត៌មានបង្ហាញ
| Example | ការពិពណ៌នា |
| វី៣៥ | កំណែកម្មវិធីបង្កប់ |
| 4A10T | យុថ្កាអតិបរមា 4 និង 10 tags |
| 10HZ | អត្រាធ្វើបច្ចុប្បន្នភាពទិន្នន័យ (របៀបបច្ចុប្បន្ន) |
| 100ms | រយៈពេលធ្វើបច្ចុប្បន្នភាពទិន្នន័យបច្ចុប្បន្ន (=1/ ទិន្នន័យ
អត្រាធ្វើបច្ចុប្បន្នភាព) |
| 6.8 ម | អត្រាខ្យល់ UWB បច្ចុប្បន្នគឺ 6.8Mbps (ជម្រើសជំនួស៖ 110k) |
| CH5 | ឆានែល UWB បច្ចុប្បន្នគឺ CH5 (ជម្មើសជំនួស
ជម្រើស៖ CH2 Channel 2) |
| អាន៖ ០ | ម៉ូឌុលបច្ចុប្បន្នគឺយុថ្កា ID=0
(ជម្រើសជំនួស៖ Tag) |
| K | ការត្រង Kalman ត្រូវបានបើក (គ្មានការបង្ហាញ៖
ពិការ) |
ការអភិវឌ្ឍន៍ និងការរៀនសូត្រ files
បញ្ជីនៃការអភិវឌ្ឍន៍ និងសម្ភារៈសិក្សាដែលយើងផ្តល់ជូនបន្ទាប់ពីទិញ៖
តារាង 10-1 ឯកសារ
| ទេ | ប្រភេទ | File ប្រភេទ |
| 1 | ការណែនាំរហ័សនៃកម្មវិធី QT | |
| 2 | RTLS1-PDOA ជួរទ្វេភាគី
កិច្ចព្រមព្រៀង |
|
| 3 | ULM3-PDOA_សៀវភៅណែនាំអ្នកប្រើប្រាស់ | |
| 4 | RTLS1-PDOA _UserManual | |
| 5 | សៀវភៅណែនាំអ្នកប្រើប្រាស់ DW3000 ដោយ Qorvo | ហ្ស៊ីប |
សំណួរគេសួរញឹកញាប់
តើប្រព័ន្ធមានប្រភពបើកចំហទេ?
ប្រព័ន្ធនេះគឺមានប្រភពបើកចំហទាំងស្រុង រួមទាំងកូដដែលបានបង្កប់ កូដកុំព្យូទ័រខាងលើ ក្បួនដោះស្រាយ និងផ្សេងៗទៀត។ ក្រៅពីនេះ វាផ្តល់នូវសៀវភៅណែនាំអំពីការអភិវឌ្ឍន៍ពាក់ព័ន្ធ និងការបង្រៀនវីដេអូ ដែលជួយអ្នកប្រើប្រាស់ឱ្យចាប់ផ្តើមការអភិវឌ្ឍន៍បន្ទាប់បន្សំយ៉ាងងាយស្រួល។
តើប្រព័ន្ធមានភាពចាស់ទុំទេ? តើវាត្រូវការការអភិវឌ្ឍឡើងវិញមុនពេលប្រើដែរឬទេ?
ប្រព័ន្ធមានភាពចាស់ទុំរួចហើយ វាផ្តល់នូវមុខងារកំណត់ទីតាំងពេញលេញ ដែលមានន័យថាអ្នកប្រើប្រាស់អាចទទួលបានទិន្នន័យទីតាំងតាមរយៈច្រកដោយផ្ទាល់។ ដូចគ្នានេះផងដែរ អ្នកប្រើប្រាស់អាចអភិវឌ្ឍប្រព័ន្ធឡើងវិញដើម្បីបំពេញតម្រូវការផ្ទាល់ខ្លួនរបស់ពួកគេតាមរយៈការកែសម្រួលកូដប្រភព។
តើខ្ញុំត្រូវការម៉ូឌុលប៉ុន្មាន?
វាអាស្រ័យ។ នេះគឺជាអតីតមួយចំនួនamples:
- ប្រសិនបើអ្នកត្រូវការជួរពីមួយទៅមួយវាត្រូវការពីរ។
- ប្រសិនបើអ្នកត្រូវការកំណត់ទីតាំង 2D វាត្រូវការ 4 ដែលរួមមានយុថ្កា 3 និង 1 tag.
- ប្រសិនបើអ្នកត្រូវរៀបចំទីតាំង 3D វាត្រូវការយ៉ាងហោចណាស់ 5 ដែលរួមមានយុថ្កា 4 និង 1 tag.
- ប្រសិនបើអ្នកមានម៉ូឌុលនៅក្នុងដៃរួចហើយ ហើយចង់បង្កើនចំនួនយុថ្កា ឬ tagsអ្នកត្រូវទិញលេខដែលទាក់ទងនៃម៉ូឌុលដែលបាត់។
- ប្រសិនបើអ្នកត្រូវការទីតាំង 10 tagsបន្ទាប់មកអ្នកត្រូវទទួលបានយុថ្កា 4 និង 10 tagsដែលលទ្ធផលនៅក្នុង 14 ម៉ូឌុល។
យើងសូមណែនាំឱ្យទិញម៉ូឌុលចំនួន 5 យ៉ាងហោចណាស់ សម្រាប់ហេតុផលខាងក្រោម៖- ទីតាំងយុថ្កាចំនួន 4 អាចគ្របដណ្ដប់លើផ្ទៃដី 3 ដងជាងទីតាំងយុថ្កា XNUMX ដង។
- តែងតែមានការបរាជ័យផ្នែកទំនាក់ទំនងមួយចំនួនក្នុងអំឡុងពេលធ្វើតេស្ត។ សម្រាប់វិធីសាស្រ្តកំណត់ទីតាំងយុថ្កាចំនួន 4 វានឹងបញ្ចប់ការកំណត់ទីតាំងដោយទិន្នន័យយុថ្កា 3 ក្នុងចំណោម 4 ប៉ុន្តែសម្រាប់វិធីសាស្រ្តកំណត់ទីតាំងយុថ្កាចំនួន 3 វាចាំបាច់ត្រូវបញ្ចប់ការកំណត់ទីតាំងដោយទិន្នន័យយុថ្កាទាំង 3 ដែលនាំឱ្យកាត់បន្ថយអត្រាជោគជ័យ។
- ផងដែរ ៤ យុថ្កា & ១ tag អាចត្រូវបានកំណត់ឡើងវិញទៅ 3 យុថ្កា & 2 tags ផងដែរ។
តើភាពត្រឹមត្រូវនៃទីតាំងគឺជាអ្វី? តើភាពត្រឹមត្រូវទាក់ទងនឹងតំបន់ទេ?
សម្រាប់ទីតាំង XY ភាពត្រឹមត្រូវគឺ 10cm (CEP95); សម្រាប់ទិសដៅ Z ភាពត្រឹមត្រូវគឺ 30 សង់ទីម៉ែត្រ (CEP95) ។ មិនមានទំនាក់ទំនងផ្ទាល់រវាងតំបន់ប្រើប្រាស់ និងភាពត្រឹមត្រូវទេ។ មិនមានការកាត់បន្ថយភាពត្រឹមត្រូវនៅពេលបង្កើនតំបន់ប្រើប្រាស់នោះទេ។ ប៉ុន្តែវាគួរតែត្រូវបានកត់សម្គាល់ថាសម្រាប់ថាមពលធំដែលត្រូវការសម្រាប់ ULM1-LD600 វានឹងមានប្រសិទ្ធិភាពពហុផ្លូវជាក់ស្តែងនៅពេលប្រើក្នុងផ្ទៃ 5 * 5cm ដូច្នេះយើងសូមណែនាំឱ្យប្រើវានៅក្នុងតំបន់ធំជាង។
តើម៉ូឌុលមានសែលទេ? តើវាមិនជ្រាបទឹកទេ?
ULM1 មិនមានសែលទេ LD150/LD600 មានសែល និងអង់តែនខាងក្រៅ។ ប៉ុន្តែសែលមិនត្រូវបានផ្សាភ្ជាប់ឬមិនជ្រាបទឹក។
តើរយៈពេលរង់ចាំថ្មមានរយៈពេលប៉ុន្មាន?
វាអាស្រ័យលើសមត្ថភាពផ្គត់ផ្គង់ថាមពលខាងក្រៅ និងប្រេកង់បញ្ចេញ។ សម្រាប់ ULM1 ដែលបំពាក់ដោយការផ្គត់ផ្គង់ថាមពលដែលត្រូវគ្នា ពេលវេលារង់ចាំយុថ្កាគឺប្រហាក់ប្រហែល។ 10 ម៉ោង, និង tag ពេលវេលារង់ចាំគឺប្រហែល។ 12 ម៉ោង។
តើអ្វីជាភាពខុសគ្នារវាង RTLS1, RTLS2, RTLS3?
RTLS1, RTLS2, RTLS3 គឺជាផលិតផលកំណត់ទីតាំង UWB ជំនាន់ទីបីដែលបង្កើតឡើងដោយក្រុមហ៊ុនរបស់យើង។
- RTLS1 គឺផ្អែកលើឧបករណ៍អភិវឌ្ឍន៍វេទិកា STM32 ប្រភពបើកចំហ និងមានពីរប្រភេទ៖ 50m និង 600m។ វាស័ក្តិសមសម្រាប់ការវាយតម្លៃការសិក្សា សិក្សាវិធីសាស្ត្រដ្រាយមូលដ្ឋាន UWB ការផ្លាស់ប្តូរប្រភពកូដផលិតផល ការរួមបញ្ចូលប្រព័ន្ធ និងល។
- RTLS2 គឺជាឧបករណ៍ផលិត, ប្រភពបិទ, ទំនាក់ទំនងតាមអ៊ីសឺរណិត, WEB ចំណុចប្រទាក់។ វាសាកសមសម្រាប់កម្មវិធីដោយផ្ទាល់នៅក្នុងគម្រោង។
- RTLS3 គឺផ្អែកលើឧបករណ៍អភិវឌ្ឍន៍វេទិកា Arduino ដែលជាប្រភពបើកចំហ ដ្រាយមូលដ្ឋានត្រូវបានរុំព័ទ្ធ និងងាយស្រួលក្នុងការអភិវឌ្ឍឡើងវិញ។ វាស័ក្តិសមសម្រាប់ការវាយតម្លៃការសិក្សា ការស្រាវជ្រាវអភិវឌ្ឍន៍ ការសិក្សាគម្រោងក្នុងមហាវិទ្យាល័យ ការរួមបញ្ចូលប្រព័ន្ធ និងល។
តើប្រេកង់អាប់ដេតគឺជាអ្វី tag?
ប្រេកង់លំនាំដើមគឺ 112ms វាអាចកំណត់ទៅ 10ms (6.8Mhz) សម្រាប់រយៈពេលអប្បបរមាតាមរយៈការកែប្រែប៉ារ៉ាម៉ែត្រកម្មវិធីបង្កប់។
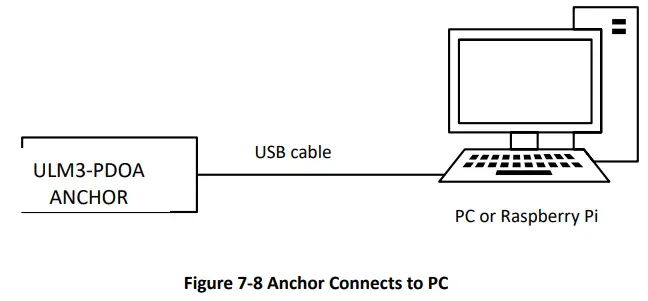
តើម៉ូឌុលភ្ជាប់ជាមួយកុំព្យូទ័រដោយរបៀបណា?
ម៉ូឌុលនេះប្រើរន្ធ USB ដើម្បីភ្ជាប់ជាមួយកុំព្យូទ័រ។ វាត្រូវការយុថ្កាមួយក្នុងចំនោម 4 ដើម្បីភ្ជាប់ជាមួយកុំព្យូទ័រ។
តើម៉ូឌុលភ្ជាប់ជាមួយឧបករណ៍បង្កប់ផ្សេងទៀតដោយរបៀបណា?
ម៉ូឌុលនេះប្រើច្រក UART-TTL នៅលើយន្តហោះ ដើម្បីភ្ជាប់ជាមួយឧបករណ៍ដែលបានបង្កប់ផ្សេងទៀត។
តើខ្ញុំត្រូវការទិញគ្រឿងបន្លាស់ផ្សេងទៀតបន្ទាប់ពីទិញប្រព័ន្ធទេ?
ប្រព័ន្ធផ្តល់ប្រភពថាមពលចល័ត និងខ្សែទិន្នន័យដែលត្រូវគ្នា។ ប្រសិនបើអ្នកប្រើត្រូវប្រើវានៅក្នុងខ្យល់អាកាស ហើយត្រូវការស្ថេរភាព និងភាពត្រឹមត្រូវប្រសើរជាងមុន យើងសូមណែនាំឱ្យទិញជើងកាមេរ៉ាដើម្បីកាន់យុថ្កា។ កម្ពស់នៃជើងកាមេរ៉ាល្អមិនលើសពី 3 ម៉ែត្រ។
តើឈុតម៉ូឌុលសម្រាប់ Drone ឬ AGV?
មិនមានបញ្ហាក្នុងការប្រើវាសម្រាប់ Drone ឬ AGV ទេ។ រហូតមកដល់ពេលនេះ មានអតិថិជនជាច្រើនបានប្រើវាតាមវិធីនេះ ហើយទទួលបានមតិកែលម្អ។
តើវាងាយស្រួលប្រើទេ?
វាងាយស្រួលក្នុងការបង្កើតប្រព័ន្ធដោយមានជំនួយពីការបង្រៀនវីដេអូ។ វាក៏មានភាពងាយស្រួលផងដែរសម្រាប់ការអភិវឌ្ឍប្រព័ន្ធឡើងវិញដោយប្រើសៀវភៅណែនាំការអភិវឌ្ឍន៍ ប្រសិនបើអ្នកប្រើមានចំណេះដឹងផ្ទៃខាងក្រោយនៃការអភិវឌ្ឍន៍ដែលបានបង្កប់។
តើខ្ញុំអាចទទួលបានសំណុំទិន្នន័យបច្ចេកទេសពេញលេញនៅពេលណា?
បន្ទាប់ពីការទិញ អ្នកប្រើប្រាស់នឹងត្រូវបង្កើតប្រព័ន្ធ និងបញ្ចប់ការធ្វើតេស្តដោយយោងតាមព័ត៌មាននៅក្នុងកញ្ចប់ជាមុនសិន ដើម្បីប្រាកដថាមុខងារនឹងបំពេញតម្រូវការរបស់គាត់។ ប្រសិនបើផលិតផលសាកសមសម្រាប់អ្នកប្រើប្រាស់ បន្ទាប់ពីបញ្ជាក់ការទូទាត់ សេវាកម្មអតិថិជនរបស់យើងនឹងបញ្ជូនទិន្នន័យបច្ចេកទេសទាំងអស់ទៅកាន់អ្នកប្រើប្រាស់។ ប្រសិនបើផលិតផលមិនបំពេញតាមតម្រូវការរបស់អ្នកប្រើប្រាស់ គាត់អាចប្រគល់ផលិតផលវិញ និងទទួលបានប្រាក់សំណងដោយមិនធ្វើឱ្យខូចរូបរាងរបស់ផលិតផល។ ផលិតផលនឹងមិនត្រូវបានប្រគល់ជូនវិញទេ បន្ទាប់ពីអ្នកប្រើប្រាស់ទទួលបានទិន្នន័យបច្ចេកទេស។
តើការរាំងស្ទះនឹងប៉ះពាល់ដល់ការដាក់ទីតាំងយ៉ាងដូចម្តេច?
- ជញ្ជាំង៖ LD600 អាចឆ្លងកាត់ជញ្ជាំងរឹងចំនួន 1 ប៉ុន្តែកំហុសនឹងកើនឡើងប្រហែល 30cm អាស្រ័យលើសម្ភារៈ និងកម្រាស់ជញ្ជាំង។
ULM1, ULM3 មិនអាចឆ្លងកាត់ជញ្ជាំងបានទេ។ - បង្គោលលួស ដើមឈើ និងវត្ថុវែង និងតូចចង្អៀតផ្សេងទៀត៖ អាស្រ័យលើចម្ងាយរវាង tags និងយុថ្កា។ សម្រាប់អតីតample ប្រសិនបើចម្ងាយរវាង tag និងយុថ្កាគឺ 60 ម៉ែត្រការស្ទះនឹងដើរតួនាទីតិចតួចលើភាពត្រឹមត្រូវនៃលទ្ធផល។ ប៉ុន្តែប្រសិនបើចម្ងាយរវាង tag ហើយយុថ្កាគឺត្រឹមតែ 1 ម៉ែត្រវានឹងប៉ះពាល់ដល់លទ្ធផលជាផ្នែកធំ។
- កញ្ចក់៖ កញ្ចក់នឹងប៉ះពាល់ដល់ភាពត្រឹមត្រូវនៃទីតាំង UWB ក្នុងផ្នែកធំ។
- ដែក ដែក និងលោហៈផ្សេងទៀត៖ លោហៈធាតុនឹងស្រូបយករលកអេឡិចត្រូម៉ាញ៉េទិចពី UWB ជាពិសេសនៅពេលដែលវាត្រូវបានបិទទៅនឹងម៉ូឌុល។ វានឹងរារាំងសញ្ញាហើយនាំឱ្យមិនមានលទ្ធផល។
- ក្តារក្រដាស និងបន្ទះឈើ៖ វានឹងមិនប៉ះពាល់ដល់លទ្ធផលច្រើនទេ ប្រសិនបើកម្រាស់ប្រហែល 10cm ប៉ុន្តែសញ្ញានឹងកាត់បន្ថយ។
តើអ្វីជាហេតុផលដែលអាចមានសម្រាប់ភាពត្រឹមត្រូវទាបនៃលទ្ធផល។
- ពិនិត្យមើលថាតើកូអរដោនេយុថ្កានៅលើកម្មវិធីកុំព្យូទ័រខាងលើត្រឹមត្រូវឬអត់។
- ពិនិត្យមើលថាតើកម្ពស់យុថ្កាគឺលើសពី 1.8 ម៉ែត្រ។
- ពិនិត្យមើលថាតើសញ្ញាណាមួយនៃយុថ្កាខ្សោយឬអត់ បន្ទាប់មកព្យាយាមផ្លាស់ទីយុថ្កាដើម្បីទទួលបានសញ្ញាកាន់តែប្រសើរ។
- ពិនិត្យមើលថាតើមានការរារាំងណាមួយរវាងម៉ូឌុល។
- ពិនិត្យមើលយុថ្កាទាំងអស់ស្ថិតនៅក្នុងយន្តហោះដូចគ្នា (ប្រសិនបើគម្រោងទាមទារ) ។
- ពិនិត្យមើលថាតើមាន tag គឺនៅឆ្ងាយពីយុថ្កាទាំងអស់។
ហេតុអ្វីបានជាវានិយាយថាជិតពេករវាងយុថ្កានិង tag?
- នៅក្នុងស្ថានភាពនៃការទំនាក់ទំនងផ្លូវឆ្ងាយយើងសូមណែនាំឱ្យប្រើជើងកាមេរ៉ាដើម្បីកាន់យុថ្កានិង tagsនិងរក្សាកម្ពស់លើសពី 1.8m កំឡុងពេលធ្វើតេស្ត។
- ពិនិត្យមើលថាតើមានការស្ទះ ឬការជ្រៀតជ្រែកអេឡិចត្រូម៉ាញ៉េទិចខ្លាំងនៅជុំវិញ។
- ពិនិត្យមើលថាតើអង់តែនត្រូវបានដំឡើងតាមរបៀបត្រឹមត្រូវ។
សំណួរ៖ តើ HR-RTLS1-PDOA គាំទ្ររបៀបកំណត់ទីតាំងអ្វីខ្លះ?
A: HR-RTLS1-PDOA គាំទ្ររបៀបវាស់មុំពេលវេលា (TOF) និងភាពខុសគ្នាដំណាក់កាលនៃការមកដល់ (PDOA) ។
ឯកសារ/ធនធាន
 |
ម៉ូឌុលកំណត់ទីតាំង HaoruTech RTLS1 [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ HR-RTLS1-PDOA, ULM3, RTLS1 ម៉ូឌុលកំណត់ទីតាំង, RTLS1, ម៉ូឌុលកំណត់ទីតាំង, ម៉ូឌុល |



