![]() មគ្គុទ្ទេសក៍អ្នកប្រើប្រាស់ | EVAL-ADMT4000
មគ្គុទ្ទេសក៍អ្នកប្រើប្រាស់ | EVAL-ADMT4000
UG-០៦
ការវាយតម្លៃ ADMT4000
Zero Power Multiturn Sensor
លក្ខណៈពិសេស
► ក្រុមប្រឹក្សាវាយតម្លៃលក្ខណៈពិសេសពេញលេញសម្រាប់ ADMT4000
►កំណត់ម៉ាញេទិកឡើងវិញ
►ការគ្រប់គ្រងកុំព្យូទ័រជាមួយ វេទិកាបង្ហាញប្រព័ន្ធ, SDP (EVALSDP-CS1Z)
►កម្មវិធីកុំព្យូទ័រសម្រាប់ការកំណត់រចនាសម្ព័ន្ធ និងការវាស់វែងទិន្នន័យ
ខ្លឹមសារនៃកញ្ចប់វាយតម្លៃ
► ក្រុមប្រឹក្សាវាយតម្លៃ EVAL-ADMT4000SD1Z
► រំញោចមេដែក
►មេដែក Dipole
► ដៃដែលអាចចល័តបាន។
តម្រូវការផ្នែករឹង
► នេះ។ EVAL-SDP-CS1Z ឬបន្ទះឧបករណ៍បញ្ជា EVAL-SDP-CB1Z
► ខ្សែ USB ដែលផ្គត់ផ្គង់ជាមួយ EVAL-SDP-CS1Z
ទាមទារកម្មវិធី
►កម្មវិធី EVAL-ADMT4000SD1Z
ការពិពណ៌នាទូទៅ
ADMT4000 គឺជាវេនម៉ាញេទិក ឧបករណ៏រាប់ដែលមានសមត្ថភាពកត់ត្រាវេននៃដែនម៉ាញេទិកខាងក្រៅជាមួយនឹងថាមពលសូន្យ។ ទីតាំងដាច់ខាត រួមទាំងចំនួនវេនត្រូវបានរាយការណ៍តាមរយៈចំណុចប្រទាក់គ្រឿងកុំព្យូទ័រ (SPI)។ ក្រុមប្រឹក្សាវាយតម្លៃ EVAL-ADMT4000SD1Z អនុញ្ញាតឱ្យមានការវាយតម្លៃនៃថាមពលសូន្យ ADMT4000 ឧបករណ៍ចាប់សញ្ញាពហុវេនដោយផ្តល់នូវវេទិកាផ្នែករឹងដែលអាចបត់បែនបានជាមួយនឹងចំណុចប្រទាក់អ្នកប្រើក្រាហ្វិក (GUI) អមមកជាមួយ។ នេះ។
EVAL-ADMT4000SD1Z មានលក្ខណៈពិសេស ADMT4000 នៅក្នុងការបញ្ចប់នៃការកំណត់រចនាសម្ព័ន្ធមេដែករាងរាង 1. ឧបករណ៍វាយតម្លៃត្រូវបានផ្សំឡើងដោយ EVAL-ADMT4000SD1Z និងការជំរុញម៉ាញេទិកនៅលើបន្ទះសៀគ្វីបោះពុម្ព (PCB) ម៉ោន។ ដើម្បីដំណើរការជាមួយ GUI ដែលបានផ្ដល់ឱ្យនោះ EVAL-SDP-CS1Z (SDP-S) ឬ EVAL-SDP-CB1Z (SDP-B) ត្រូវបានទាមទារ ដែលអាចផ្លាស់ប្តូរបានថាជាបន្ទះឧបករណ៍បញ្ជា SDP នៅក្នុងការណែនាំអ្នកប្រើប្រាស់នេះ។
 រូបភាពទី 1. ADMT4000 End of Shaft Magnetic Evaluation System រួមមាន EVAL-ADMT4000SD1Z,
រូបភាពទី 1. ADMT4000 End of Shaft Magnetic Evaluation System រួមមាន EVAL-ADMT4000SD1Z,
ចំណុចប្រទាក់ SDP និង EVAL-ADMT4000SD1Z GUI
សូមមើលទំព័រចុងក្រោយសម្រាប់ការសំខាន់មួយ។ ការព្រមាន និងលក្ខខណ្ឌផ្លូវច្បាប់។
ចាប់ផ្តើម
ជំហានចាប់ផ្ដើមរហ័ស
ក្រុមប្រឹក្សាវាយតម្លៃ EVAL-ADMT4000SD1Z រូបភាពទី 2 ភ្ជាប់ទៅ EVAL-SDP-CS1Z (SDP-S) or EVAL-SDP-CB1Z (SDP-B). នៅក្នុងការណែនាំរបស់អ្នកប្រើនេះ SDP សំដៅលើបន្ទះឧបករណ៍បញ្ជាទាំងនេះ។ SDP គឺជាតំណភ្ជាប់ទំនាក់ទំនងរវាងកុំព្យូទ័រ និងកុំព្យូទ័រ
EVAL-ADMT4000SD1Z ហើយ SDP ផ្តល់នូវ SPI ដែលត្រូវការដើម្បីគ្រប់គ្រង ADMT4000 និងផ្ញើទិន្នន័យដែលបានចាប់យកដោយផ្ទាល់ទៅកុំព្យូទ័រម៉ាស៊ីន។
កម្មវិធីវាយតម្លៃ និងកម្មវិធីបញ្ជា EVAL-ADMT4000SD1Z ត្រូវតែត្រូវបានដំឡើង មុនពេលភ្ជាប់បន្ទះវាយតម្លៃ និងបន្ទះឧបករណ៍បញ្ជា SDP ទៅកាន់ច្រក USB របស់កុំព្យូទ័រ ដើម្បីធានាថាប្រព័ន្ធវាយតម្លៃត្រូវបានទទួលស្គាល់ត្រឹមត្រូវនៅពេលភ្ជាប់។
ដើម្បីចាប់ផ្តើមប្រើ EVAL-ADMT4000SD1Z សូមអនុវត្តតាមជំហានខាងក្រោម៖
- ដំឡើងកម្មវិធី EVAL-ADMT4000SD1Z ។ សូមមើលការដំឡើងផ្នែកកម្មវិធី EVAL-ADMT4000SD1Z សម្រាប់ព័ត៌មានបន្ថែម។
- ភ្ជាប់ SDP ទៅ EVAL-ADMT4000SD1Z ។
- រុញ EVAL-ADMT4000SD1Z ចូលទៅក្នុងតង្កៀបម៉ោនមេដែក។ ដើម្បីតម្រឹមមេដែកឱ្យបានត្រឹមត្រូវជាមួយឧបករណ៍ចាប់សញ្ញា ADMT4000 សូមប្រាកដថា EVAL-ADMT4000SD1Z ត្រូវបានបញ្ចូលយ៉ាងពេញលេញទៅក្នុងមេដែក PCB mount។
- ភ្ជាប់ SDP ទៅនឹងកុំព្យូទ័រដោយប្រើខ្សែ USB ដែលបានផ្គត់ផ្គង់ (USB ប្រភេទ A ទៅ Mini-B) ។
- បើកដំណើរការកម្មវិធី EVAL-ADMT4000SD1Z ។ ចុចគ្រាប់ចុច Windows® ដើម្បីបើកម៉ឺនុយចាប់ផ្តើមវីនដូ និងបញ្ជីកម្មវិធី។ រុករកទៅឧបករណ៍អាណាឡូក ហើយចុច EVALADMT4000SDZ ។
 រូបភាពទី 2. ការកំណត់រចនាសម្ព័ន្ធផ្នែករឹងបង្ហាញមេដែកបង្ហាញ
រូបភាពទី 2. ការកំណត់រចនាសម្ព័ន្ធផ្នែករឹងបង្ហាញមេដែកបង្ហាញ
ការជួបប្រជុំគ្នានិង EVAL-ADMT4000SD1Z
ក្រុមប្រឹក្សាវាយតម្លៃ
EVAL-ADMT4000SD1Z ត្រូវបានរចនាឡើងដើម្បីឱ្យអ្នកប្រើប្រាស់ចាប់ផ្តើមយ៉ាងឆាប់រហ័សជាមួយ ADMT4000 ដោយប្រើកម្មវិធីវាយតម្លៃដែលបានផ្គត់ផ្គង់ និងចំណុចប្រទាក់ SDP ។
តាមរយៈការប្រើប្រាស់បឋមកថានៅលើ EVAL-ADMT4000SD1Z តារាងទី 1 អ្នកប្រើប្រាស់អាចភ្ជាប់ microprocessor ជំនួសដើម្បីបង្កើតកម្មវិធីផ្ទាល់ខ្លួន។ ផ្នែក PCB ដែល ADMT4000 ត្រូវបានម៉ោន ត្រូវបានរចនាឡើងដើម្បីអនុញ្ញាតឱ្យអ្នកប្រើម៉ោនបន្ទះនៅក្នុងបរិយាកាសដែលមានកំណត់ដោយដកផ្នែកបំបែកចេញពីផ្នែកចំណុចប្រទាក់។ បឋមកថាត្រូវបានផ្តល់ជូននៅលើផ្នែកបំបែកដើម្បីបើកដំណើរការនៃ ADMT4000 ជាមួយនឹង microprocessor ។
ADMT4000 ការចាប់សញ្ញាម៉ាញេទិក
ទីតាំងនៃឧបករណ៏មុំ ADMT4000 ទាក់ទងនឹងចំណុចកណ្តាលនៃកញ្ចប់ IC ត្រូវបានរៀបរាប់លម្អិតនៅក្នុងសន្លឹកទិន្នន័យ ADMT4000។ ការផ្គុំមេដែកតម្រឹមមេដែកដែលបានផ្គត់ផ្គង់យ៉ាងត្រឹមត្រូវជាមួយនឹងឧបករណ៍ចាប់សញ្ញា ADMT4000 នៅពេលដែល PCB ត្រូវបានបញ្ចូលយ៉ាងពេញលេញទៅក្នុងសន្និបាតមេដែក។ មេដែកឌីសតម្រង់ទិស diametrical (អង្កត់ផ្ចិត 10 mm និងកម្ពស់ 5 mm) ត្រូវបានផ្គត់ផ្គង់ជាមួយឧបករណ៍វាយតម្លៃ EVAL-ADMT4000SD1Z ។ មេដែកត្រូវបានផលិតចេញពី samarium (Sm)2 -colbalt (Co)17 ជាមួយនឹង remanence (Br) ពី 950 mT ដល់ 1020 mT ។
លទ្ធផល ADMT4000
ADMT4000 បញ្ចេញទិន្នន័យទីតាំងមុំ ស្ថានភាពឧបករណ៍ និងការវិនិច្ឆ័យលើ SPI ។
ការផ្គត់ផ្គង់ថាមពល
EVAL-ADMT4000SD1Z ប្រើការផ្គត់ផ្គង់ 3.3 V ពីចំណុចប្រទាក់ SDP ដើម្បីផ្តល់ថាមពលដល់សមាសធាតុទាំងអស់នៅលើក្តារ លើកលែងតែ LT3461ដែលត្រូវបានថាមពលពី 5 V USB ។ LT3461 គឺជាឧបករណ៍បំលែង DC/DC មួយជំហានឡើង ដែលប្រើសម្រាប់សៀគ្វីកំណត់ម៉ាញ៉េទិចឡើងវិញ។ វាអាចទៅរួចក្នុងការប្រើប្រាស់ការផ្គត់ផ្គង់ខាងក្រៅដោយភ្ជាប់តាមរយៈបឋមកថាផ្សេងៗដូចបង្ហាញក្នុងរូបភាពទី 24 និងរូបភាពទី 25 ហើយបានពិពណ៌នានៅក្នុងតារាងទី 1 ។
ADMT4000 ក្រុមប្រឹក្សាភិបាលបំបែកឆ្ងាយ
EVAL-ADMT4000SD1Z រួមបញ្ចូលផ្នែកបំបែក។ សៀគ្វីចំណុចប្រទាក់ SDP អាចត្រូវបានយកចេញដោយការចាប់យកស្ពានតូចចង្អៀតនៃបន្ទះវាយតម្លៃដែលមានទីតាំងនៅកណ្តាល EVALADMT4000SD1Z ។ ការដកសៀគ្វីចំណុចប្រទាក់ SDP ចេញអនុញ្ញាតឱ្យអ្នកប្រើប្រើបន្ទះវាយតម្លៃឯករាជ្យតូចជាង។ ADMT4000 អាចត្រូវបានភ្ជាប់ទៅប្រព័ន្ធខាងក្រៅដែលផ្គត់ផ្គង់ថាមពល និងគ្រប់គ្រងចំណុចប្រទាក់ឌីជីថល។
ឧបករណ៍ភ្ជាប់ឧបករណ៍វាយតម្លៃ
បឋមកថា PCB សម្រាប់ភ្ជាប់ប្រព័ន្ធខាងក្រៅទៅ EVAL-ADMT4000SD1Z ត្រូវបានរាយក្នុងតារាងទី 1 ។
តារាងទី 1. សេចក្តីសង្ខេបនៃក្បាលឧបករណ៍វាយតម្លៃ EVAL-ADMT4000SD1Z
| អ្នកកំណត់អត្តសញ្ញាណ | ការពិពណ៌នា |
| P1 | រន្ធសម្រាប់បន្ទះចំណុចប្រទាក់ SDP |
| P2 | បឋមកថាសម្រាប់សញ្ញា RSTB, CNV, BUSY, និង GPIO4 |
| P3 | បឋមកថាសម្រាប់សញ្ញា SPI |
| P4 | បឋមកថាដែលអនុញ្ញាតឱ្យចូលប្រើ I²C, SPI, ស្ថានភាព និងគ្រប់គ្រងការបញ្ចូល និងលទ្ធផលទូទៅ (GPIO) ពីផ្នែកបំបែក |
| P5 | បឋមកថាសម្រាប់ឧបករណ៏កំណត់ឡើងវិញម៉ាញេទិក |
| P6 | បឋមកថាសម្រាប់របុំឌីផេរ៉ង់ស្យែលដើម្បីវាស់ចរន្តនៅក្នុងឧបករណ៏កំណត់ម៉េញ៉ទិកឡើងវិញ |
| P7 | បឋមកថាសម្រាប់ការចូលទៅកាន់សញ្ញាគន្លឹះនៅលើផ្នែកបំបែក |
តារាងទី 2 ដល់តារាងទី 8 រៀបរាប់លម្អិតអំពីការភ្ជាប់ទៅបឋមកថាដែលមាននៅលើ EVAL-ADMT4000SD1Z ។
តារាង 2. រន្ធ P1 សម្រាប់ក្រុមប្រឹក្សាភិបាលចំណុចប្រទាក់ SDP
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 3, 4, 6, 11, 17, 23, 28, 36, 40, 46, 52, 58, 63, 69, 75, 81, 86, 93, 98, ៣, ៥, ១៥, ១៧, ១៩ |
GND | ដីប្រព័ន្ធ |
| 5 | USB_V | ការផ្គត់ផ្គង់ 5 V ពីរន្ធ USB នៃកុំព្យូទ័រដែលបានភ្ជាប់ |
| 38 | SPI CSB | ជ្រើសរើសបន្ទះឈីប SPI សម្រាប់ ADMT4000, SDP Chip Select Port C |
| 43 | GPIO3_ACALC | GPIO ឬស្ថានភាពគណនាមុំ |
| 44 | COIL_RS | បើកដំណើរការកំណត់ឡើងវិញម៉ាញេទិកឡើងវិញ |
| 45 | GPIO0_BUSY | GPIO ឬលទ្ធផលស្ថានភាពរវល់ |
| 46 | V_EN | បើក VDD សម្រាប់ ADMT4000 |
| 56 | EEPROM_A0 | អាស័យដ្ឋាន A0 នៃឧបករណ៍សម្គាល់ក្តារដែលអាចលុបបានដោយអេឡិចត្រិចដែលអាចលុបបានតែអង្គចងចាំដែលអាចអានបានតែប៉ុណ្ណោះ (EEPROM) |
| 74 | RSTB | មុខងារកំណត់ឡើងវិញ ADMT4000 |
| 76 | GPIO1_CNV | GPIO ឬចាប់ផ្តើមបម្លែង |
| 77 | BOOST_EN | បើកសៀគ្វីជំរុញការកំណត់ឡើងវិញម៉ាញេទិក |
| 78 | GPIO ១ | GPIO ឬស្ថានភាពកំហុស |
| 79 | I2C SCL_0 | នាឡិកា I²C |
| 80 | I2C SDA_0 | ទិន្នន័យ I²C |
| 82 | SPI SCLK | នាឡិកា SPI |
| 83 | SPI SDO | ទិន្នន័យរង SPI ចេញ |
| 84 | SPI SDI | ទិន្នន័យរង SPI នៅក្នុង |
| 85 | SPI_SEL_A_N | ជ្រើសរើសបន្ទះឈីប SPI សម្រាប់ឧបករណ៍ពង្រីក GPIO, SDP Chip Select A |
| 116 | 3V3 | ការផ្គត់ផ្គង់ចម្បងសម្រាប់ ADMT4000 និងឧបករណ៍ជំនួយ |
តារាងទី 3. បឋមកថា P2 សម្រាប់ RSTB, CNV, BUSY, និង GPIO4 Signal
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | RSTB | មុខងារកំណត់ឡើងវិញ ADMT4000 |
| 2 | GPIO1_CNV | GPIO1 និងបម្លែងការចាប់ផ្តើម |
| 3 | GPIO0_BUSY | GPIO0 និងលទ្ធផលស្ថានភាពរវល់ |
| 4 | GPIO ១ | GPIO ១ |
| 5 | GND | ដីប្រព័ន្ធ |
តារាងទី 4. បឋមកថា P3 សម្រាប់ SPI
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | I2C SCLK | នាឡិកា I2C |
| 2 | SPI SDO | ទិន្នន័យ SPI ចេញ |
| 3 | SPI SDI | ទិន្នន័យ SPI |
| 4 | SPI CSB | ជ្រើសរើសបន្ទះឈីប SPI សម្រាប់ ADMT4000, SDP Chip Select Port C |
តារាង 5. បឋមកថាចំណុចប្រទាក់ខាងក្រៅ P4
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | 3V3 | ការផ្គត់ផ្គង់ចម្បងសម្រាប់អេ ADMT4000 និងឧបករណ៍ជំនួយ |
| 2 | GND | ដីប្រព័ន្ធ |
| 3 | 5V | ការផ្គត់ផ្គង់សម្រាប់ឧបករណ៏កំណត់ឡើងវិញម៉ាញេទិក |
| 4 | SPI SCLK | នាឡិកា SPI |
| 5 | SPI SDO | ទិន្នន័យ SPI ចេញ |
| 6 | SPI SDI | ទិន្នន័យ SPI |
| 7 | SPI CSB | ជ្រើសរើសបន្ទះឈីប SPI |
| 8 | RSTB | មុខងារកំណត់ឡើងវិញ ADMT4000 |
| 9 | GPIO1_CNV | GPIO1 ឬបម្លែងការចាប់ផ្តើម |
| 10 | GPIO0_BUSY | GPIO0 ឬលទ្ធផលស្ថានភាពរវល់ |
| 11 | GPIO ១ | GPIO ១ |
| 12 | GPIO5_BOOTLOA ឃ | GPIO5 ឬស្ថានភាពចាប់ផ្ដើម |
| 13 | GPIO3_ACALC | GPIO3 ឬស្ថានភាពគណនាមុំ |
| 14 | I2C SDA_0 | ទិន្នន័យ I2C |
| 15 | I2C SCL_0 | នាឡិកា I2C |
| 16 | V_EN | បើក VDD សម្រាប់ ADMT4000 |
| 17 | BOOST_EN | បើកសៀគ្វីជំរុញការកំណត់ឡើងវិញម៉ាញេទិក |
| 18 | COIL_RS | បើកដំណើរការកំណត់ឡើងវិញម៉ាញេទិកឡើងវិញ |
តារាងទី 6. P5 បឋមកថាសម្រាប់ឧបករណ៏កំណត់ឡើងវិញម៉ាញេទិក
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | COIL+ | ស្ថានីយវិជ្ជមាននៃឧបករណ៏កំណត់ឡើងវិញម៉ាញេទិក។ |
| 2 | ខូល- | ស្ថានីយអវិជ្ជមាននៃឧបករណ៏កំណត់ម៉េញ៉ទិកឡើងវិញ។ |
តារាងទី 7. P6 បឋមកថាសម្រាប់របុំឌីផេរ៉ង់ស្យែលដើម្បីវាស់ចរន្តនៅក្នុងឧបករណ៏កំណត់ម៉េញ៉ទិកឡើងវិញ
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | COIL+ | រេស៊ីស្តង់យល់ខ្ពស់ វ៉ុលtage |
| 2 | COIL++ | ឧបករណ៍ទប់អារម្មណ៍ទាបtage |
តារាងទី 8. បឋមកថា P7 ដើម្បីអនុញ្ញាតឱ្យចូលប្រើ I²C, SPI, ស្ថានភាព និងការគ្រប់គ្រង GPIO ពីផ្នែកបំបែក
| លេខសម្ងាត់ | Mnemonic | ការពិពណ៌នា |
| 1 | វីឌី | ការផ្គត់ផ្គង់ថាមពលដោយផ្ទាល់ទៅ ADMT4000 |
| 2 | 5V | ការផ្គត់ផ្គង់ 5 V សម្រាប់កម្រិត VDRIVE ជំនួស |
| 3 | GPIO ១ | GPIO |
| 4 | I2C SCLK_I | នាឡិកា SPI |
| 5 | SPI SDO_I | ទិន្នន័យ SPI ចេញ |
| 6 | SPI SDI_I | ទិន្នន័យ SPI |
| 7 | SPI CSB_I | ជ្រើសរើសបន្ទះឈីប SPI សម្រាប់ ADMT4000 |
| 8 | RSTB_I | មុខងារកំណត់ឡើងវិញ ADMT4000 |
| 9 | CNV_I | បម្លែងការចាប់ផ្តើម |
| 10 | GPIO0_BUSY | GPIO ឬលទ្ធផលស្ថានភាពរវល់ |
| 11 | GPIO ១ | GPIO |
| 12 | GPIO5_BOOTLOAD | GPIO ឬស្ថានភាពចាប់ផ្ដើម |
| 13 | GPIO3_ACALC | GPIO ឬស្ថានភាពគណនាមុំ |
| 14 | GND | ដីប្រព័ន្ធ |
| 15 | VRDIVE | ការផ្គត់ផ្គង់ ADMT4000 GPIO |
ការដំឡើងកម្មវិធី
ការដំឡើងកម្មវិធី EVAL-ADMT4000SD1Z និងការដំឡើងផ្នែកកម្មវិធីបញ្ជាវេទិកាបង្ហាញប្រព័ន្ធបង្ហាញពីដំណើរការដំឡើងកម្មវិធីដោយសន្មតថាកម្មវិធីបញ្ជា SDP មិនត្រូវបានដំឡើងពីមុន។
ការដំឡើង EVAL-ADMT4000SD1Z សូហ្វវែរ
ដើម្បីដំឡើងកម្មវិធី EVAL-ADMT4000SD1Z សូមអនុវត្តតាមជំហានខាងក្រោម៖
- ដំណើរការ EVAL-ADMT4000SDZ.exe file ផ្គត់ផ្គង់នៅលើ ADMT4000 ទំព័រផលិតផលដើម្បីដំឡើងកម្មវិធី EVAL-ADMT4000SDZ ។ ប្រសិនបើប្រអប់លេចឡើងដើម្បីសុំការអនុញ្ញាតដើម្បីអនុញ្ញាតឱ្យកម្មវិធីធ្វើការផ្លាស់ប្តូរលើកុំព្យូទ័រសូមចុចបាទ។
- ជ្រើសរើសទីតាំងដើម្បីដំឡើងកម្មវិធី ហើយបន្ទាប់មកចុច Next (សូមមើលរូបភាពទី 3)។
 រូបភាពទី 3. ផ្លូវដំឡើង ADMT4000
រូបភាពទី 3. ផ្លូវដំឡើង ADMT4000 - សេចក្តីសង្ខេបនៃការដំឡើងបន្ទាប់មកបង្ហាញ។ ចុច Next ដើម្បីបន្ត (សូមមើលរូបភាពទី 4)។
 រូបភាពទី 4. សេចក្តីសង្ខេបការដំឡើង ADMT4000
រូបភាពទី 4. សេចក្តីសង្ខេបការដំឡើង ADMT4000 - នៅពេលការដំឡើងចប់សូមចុច Finish (សូមមើលរូបភាពទី 5)។
 រូបភាពទី 5. ការដំឡើង ADMT4000 បានបញ្ចប់
រូបភាពទី 5. ការដំឡើង ADMT4000 បានបញ្ចប់
ការដំឡើងកម្មវិធីបញ្ជាវេទិកាបង្ហាញប្រព័ន្ធ
បន្ទាប់ពីការដំឡើងកម្មវិធី EVAL-ADMT4000SD1Z ត្រូវបានបញ្ចប់ បង្អួចស្វាគមន៍នឹងបង្ហាញ (សូមមើលរូបភាពទី 6) សម្រាប់ការដំឡើងកម្មវិធីបញ្ជា SDP ។
អនុវត្តតាមជំហានខាងក្រោមដើម្បីដំឡើងកម្មវិធីបញ្ជា SDP៖
- ជាមួយនឹងបន្ទះ SDP ត្រូវបានផ្តាច់ចេញពីរន្ធ USB របស់កុំព្យូទ័រ សូមប្រាកដថាកម្មវិធីផ្សេងទៀតទាំងអស់ត្រូវបានបិទ ហើយបន្ទាប់មកចុច Next។
 រូបភាពទី 6. ការដំឡើងវេទិកា SDP
រូបភាពទី 6. ការដំឡើងវេទិកា SDP - បន្ទាប់មកកិច្ចព្រមព្រៀងអាជ្ញាបណ្ណនឹងលេចចេញមក។ អានកិច្ចព្រមព្រៀង ជ្រើសរើស ខ្ញុំទទួលយកកិច្ចព្រមព្រៀងអាជ្ញាប័ណ្ណ ហើយចុច បន្ទាប់ ហើយបន្ទាប់មក ខ្ញុំយល់ព្រម (សូមមើលរូបភាពទី 7) ។
 រូបភាពទី 7. អាជ្ញាប័ណ្ណវេទិកា SDP
រូបភាពទី 7. អាជ្ញាប័ណ្ណវេទិកា SDP - បន្ទាប់មក បង្អួចជ្រើសរើសសមាសភាគនឹងបង្ហាញឡើងជាមួយនឹងសមាសភាគលំនាំដើមដែលបានជ្រើសរើសជាមុន។ ចុចបន្ទាប់ (សូមមើលរូបភាពទី 8) ។
 រូបភាពទី 8. ការជ្រើសរើសសមាសធាតុ SDP
រូបភាពទី 8. ការជ្រើសរើសសមាសធាតុ SDP - ជ្រើសរើសទីតាំងដើម្បីដំឡើងកម្មវិធីបញ្ជា ហើយបន្ទាប់មកចុច ដំឡើង (សូមមើលរូបភាពទី 9) ។
 រូបភាពទី 9. ថតការដំឡើងវេទិកា SDP
រូបភាពទី 9. ថតការដំឡើងវេទិកា SDP - ដើម្បីបញ្ចប់ការដំឡើងកម្មវិធីបញ្ជា សូមចុចបិទ ដែលបិទអ្នកជំនួយការដំឡើង (សូមមើលរូបភាពទី 10)។
 រូបភាពទី 10. ការដំឡើង SDP បានបញ្ចប់
រូបភាពទី 10. ការដំឡើង SDP បានបញ្ចប់ - ការដំឡើងកម្មវិធីបញ្ជាបន្ទាប់មកដំឡើងកម្មវិធីបញ្ជាវីនដូ។ ប្រសិនបើ Windows Security ស្នើសុំការអនុញ្ញាតក្នុងការដំឡើង សូមចុចដំឡើង (សូមមើលរូបភាពទី 11)។
 រូបភាពទី 11. ដំឡើងកម្មវិធីបញ្ជា SDP
រូបភាពទី 11. ដំឡើងកម្មវិធីបញ្ជា SDP
ការកំណត់រចនាសម្ព័ន្ធ EEPROM
EEPROM នៅលើបន្ទះកូនស្រី EVAL-ADMT4000SD1Z រក្សាទុកប្រភេទបន្ទះកូនស្រី ហើយត្រូវបានកំណត់ពីរោងចក្រ។ ប្រសិនបើ EEPROM មិនត្រូវបានគេដាក់កម្មវិធី ឬបន្ទះកូនស្រីមិនត្រឹមត្រូវត្រូវបានភ្ជាប់ទេ ប្រអប់មួយដែលបង្ហាញក្នុងរូបភាព 12 នឹងលេចឡើង។
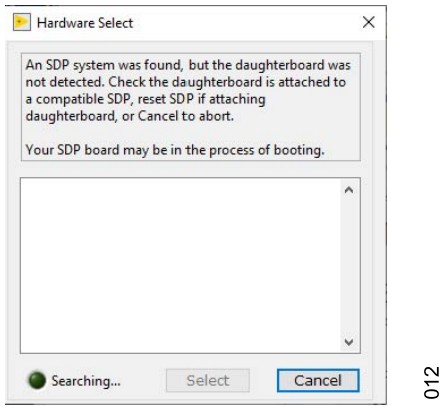 រូបភាពទី 12. បង្អួចលេចឡើងដែលបង្ហាញថាក្រុមប្រឹក្សាកូនស្រីដែលមិនបានរំពឹងទុកត្រូវបានភ្ជាប់ជាមួយ SDP ឬថា EVAL-ADMT4000SD1ZEEPROM ត្រូវបានកម្មវិធីមិនត្រឹមត្រូវ
រូបភាពទី 12. បង្អួចលេចឡើងដែលបង្ហាញថាក្រុមប្រឹក្សាកូនស្រីដែលមិនបានរំពឹងទុកត្រូវបានភ្ជាប់ជាមួយ SDP ឬថា EVAL-ADMT4000SD1ZEEPROM ត្រូវបានកម្មវិធីមិនត្រឹមត្រូវ
ដើម្បីកំណត់រចនាសម្ព័ន្ធ EEPROM បើកដំណើរការឧបករណ៍ប្រើប្រាស់កម្មវិធី SDP EEPROM (.NET) ដែលមានពី ឧបករណ៍អាណាឡូក, Inc., ការលក់.
សមរម្យ .dat file ក៏មានផងដែរតាមការស្នើសុំដើម្បីកំណត់រចនាសម្ព័ន្ធការផ្ទុក File tab ដូចបង្ហាញក្នុងរូបភាពទី 13 ដែលប្រើ Address 54។
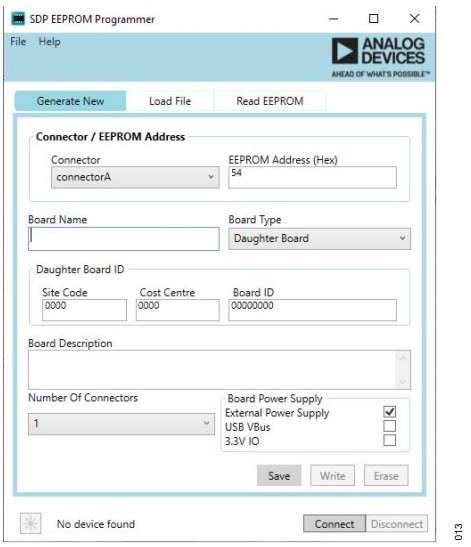 រូបភាពទី 13. ឧបករណ៍ប្រើប្រាស់កំណត់រចនាសម្ព័ន្ធ SDP EEPROM
រូបភាពទី 13. ឧបករណ៍ប្រើប្រាស់កំណត់រចនាសម្ព័ន្ធ SDP EEPROM
ប្រតិបត្តិការកម្មវិធី EVAL-ADMT4000SD1Z
លើសview នៃ GUI ការវាយតម្លៃ ADMT4000 និងការចាប់ផ្ដើមផ្នែកកម្មវិធី EVAL-ADMT4000SD1Z ពិពណ៌នាអំពីរបៀបដំណើរការ GUI ដែលបានផ្តល់ជូននៅក្នុងកម្មវិធី EVAL-ADMT4000SD1Z ។
ការចាប់ផ្តើម EVAL-ADMT4000SD1Z សូហ្វវែរ
បន្ទាប់ពីបញ្ចប់ជំហាននៅក្នុងផ្នែកដំឡើងកម្មវិធី សូមបើកដំណើរការកម្មវិធី EVAL-ADMT4000SD1Z ដូចខាងក្រោម៖
► ភ្ជាប់ SDP ជាមួយ EVAL-ADMT4000SD1Z ទៅកុំព្យូទ័រដោយប្រើខ្សែ USB ដែលផ្តល់។
► ចុចលើរូបតំណាងវីនដូ ដើម្បីបើកម៉ឺនុយចាប់ផ្តើមវីនដូ និងបញ្ជីកម្មវិធី។ ជ្រើសរើសឧបករណ៍អាណាឡូក/EVAL-ADMT4000SD1Z។
► ប្រសិនបើ ADMT4000 Evaluation GUI ត្រូវបានដំឡើងដោយជោគជ័យ ហើយ EVAL-ADMT4000SD1Z ត្រូវបានរកឃើញ កម្មវិធីវាយតម្លៃ EVALADMT4000SD1Z នឹងបើកដោយស្វ័យប្រវត្តិ (សូមមើលរូបភាពទី 14)។ ឈ្មោះបន្ទះវាយតម្លៃបង្ហាញនៅលើបន្ទះខាងមុខនៃ GUI (សូមមើលស្លាកលេខ 1 ក្នុងរូបភាពទី 14)។
 រូបភាពទី 14. ការវាយតម្លៃ ADMT4000 GUI បង្ហាញការភ្ជាប់
រូបភាពទី 14. ការវាយតម្លៃ ADMT4000 GUI បង្ហាញការភ្ជាប់
ឧបករណ៍វាយតម្លៃ EVALADMT4000SD1Z
► ប្រសិនបើប្រព័ន្ធវាយតម្លៃ EVAL-ADMT4000SD1Z មិនត្រូវបានភ្ជាប់ទៅច្រក USB តាមរយៈ SDP ទេនោះ ឈ្មោះបន្ទះវាយតម្លៃមិនបង្ហាញនៅលើបន្ទះខាងមុខទេ។ បន្ទាប់ពីពីរបីវិនាទី បង្អួចជ្រើសរើសផ្នែករឹងលេចឡើង (សូមមើលរូបភាពទី 15) ។ ភ្ជាប់ប្រព័ន្ធវាយតម្លៃ EVAL-ADMT4000SD1Z ទៅច្រក USB របស់កុំព្យូទ័រ ហើយរង់ចាំពីរបីវិនាទី។ ផ្ទាំង Hardware Select បន្ទាប់មកបង្ហាញឧបករណ៍វាយតម្លៃ SDP ដែលភ្ជាប់ទៅកុំព្យូទ័រ។ ជ្រើសរើស EVAL-ADMT4000SD1Z ហើយចុច Select (សូមមើលរូបភាពទី 16)។
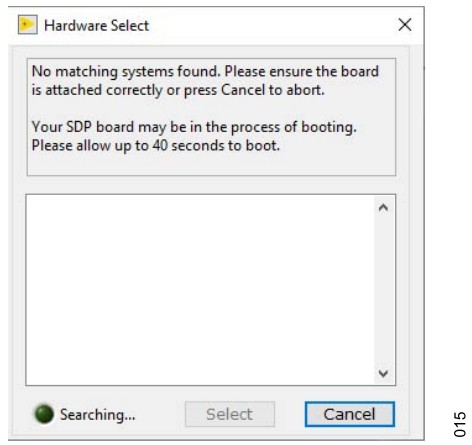 រូបភាពទី 15. Hardware ជ្រើសរើស Window ដែលបង្ហាញនៅពេល GUI ចាប់ផ្តើម
រូបភាពទី 15. Hardware ជ្រើសរើស Window ដែលបង្ហាញនៅពេល GUI ចាប់ផ្តើម
ដោយគ្មាន EVAL-ADMT4000SD1Z ភ្ជាប់ទៅកុំព្យូទ័រ
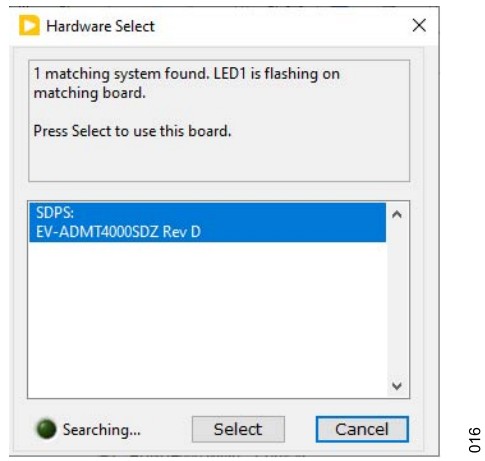 រូបភាពទី 16. Hardware ជ្រើសរើស Window ដែលបង្ហាញនៅពេល
រូបភាពទី 16. Hardware ជ្រើសរើស Window ដែលបង្ហាញនៅពេល
EVALADMT4000SD1Z ភ្ជាប់ទៅកុំព្យូទ័រ
► នៅពេលចាប់ផ្តើម ADMT4000 ការវាយតម្លៃ GUI ចាប់ផ្តើមដោយស្វ័យប្រវត្តិដើម្បីទទួលបាន និងបង្ហាញទិន្នន័យពី ADMT4000. ការកំណត់លំដាប់ដំបូងត្រូវបានកំណត់នៅក្នុងការកំណត់ដែលបានផ្គត់ផ្គង់ file C: \\ កម្មវិធី Files\Analog Devices\EVAL-ADMT4000SDZ 0.0.0\dataADMT4000 Config.csv. ដើម្បីចាប់ផ្តើម GUI នៅក្នុងការកំណត់រចនាសម្ព័ន្ធដែលកំណត់ដោយអ្នកប្រើប្រាស់ អ្នកប្រើប្រាស់ត្រូវតែកែប្រែការកំណត់ file.
លើសVIEW នៃការវាយតម្លៃ ADMT4000 GUI
GUI ការវាយតម្លៃ ADMT4000 ផ្តល់នូវផ្ទាំងជាច្រើន ដើម្បីអនុញ្ញាតឱ្យអ្នកប្រើប្រាស់វាយតម្លៃលក្ខណៈពិសេសរបស់ ADMT4000។ ផ្ទាំង GUI ត្រូវបានបង្ហាញ និងដាក់ស្លាកក្នុងរូបភាពទី 17 ។ តារាងទី 9 រៀបរាប់ពីមុខងារគន្លឹះដែលបានចូលប្រើក្នុងផ្ទាំង។
 រូបភាពទី 17. GUI Tab Menu
រូបភាពទី 17. GUI Tab Menu
តារាងទី 9. ការពិពណ៌នាអំពីផ្ទាំង GUI វាយតម្លៃ ADMT4000 ដែលមានស្លាក
| ស្លាក លេខ | ឈ្មោះផ្ទាំង | ការពិពណ៌នា |
| 1 | ការទិញយកទិន្នន័យ | ផ្ទាំងការទិញយកទិន្នន័យគឺជាផ្ទាំងអ្នកប្រើប្រាស់ចម្បងសម្រាប់ត្រួតពិនិត្យលទ្ធផលពី ADMT4000 និងសម្រាប់កំណត់រចនាសម្ព័ន្ធការទិញយក។ |
| 2 | ឧបករណ៍ប្រើប្រាស់ | ផ្ទាំងឧបករណ៍ប្រើប្រាស់បង្ហាញព័ត៌មានលម្អិតនៃស្ថានភាពចុះឈ្មោះ FAULT និងអនុញ្ញាតឱ្យផ្ទុកឡើង នៃការកំណត់រចនាសម្ព័ន្ធអ្នកប្រើប្រាស់ និងការកត់ត្រាពាក្យបញ្ជា SPI ។ |
| 3 | ការក្រិតតាមខ្នាត | ផ្ទាំង Calibration គឺជាកន្លែងដែលអ្នកប្រើប្រាស់កំណត់រចនាសម្ព័ន្ធការក្រិតតាមកម្រិតប្រព័ន្ធ។ |
ផ្ទាំងទទួលទិន្នន័យ
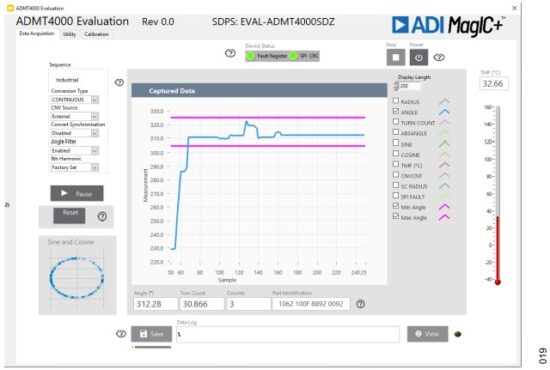
ផ្ទាំងការទិញយកទិន្នន័យ (សូមមើលរូបភាពទី 18) បង្ហាញការវាស់ស្ទង់របស់ឧបករណ៍ចាប់សញ្ញា និងផ្តល់សិទ្ធិចូលទៅកាន់ការវិនិច្ឆ័យរបស់ឧបករណ៍ចាប់សញ្ញា។
 រូបភាពទី 18. ផ្ទាំងទទួលទិន្នន័យ
រូបភាពទី 18. ផ្ទាំងទទួលទិន្នន័យ
តារាងទី 10 ផ្តល់នូវការពិពណ៌នាអំពីស្លាកនៅក្នុងផ្ទាំង ការទិញយកទិន្នន័យ រូបភាពទី 18 ។
តារាងទី 10. ការពិពណ៌នាសម្រាប់ស្លាកផ្ទាំងទទួលទិន្នន័យ
| ស្លាក លេខ | ឈ្មោះស្លាក | ការពិពណ៌នា |
| 1 | ការគ្រប់គ្រងលំដាប់ | ការគ្រប់គ្រងសម្រាប់ការជ្រើសរើសការកំណត់លំដាប់រង្វាស់។ |
| 2 | ចាប់ផ្តើម ឬផ្អាក | ចាប់ផ្តើមលំដាប់ដែលបានកំណត់រចនាសម្ព័ន្ធ ឬផ្អាកលំដាប់បច្ចុប្បន្ន។ |
| 3 | កំណត់ឡើងវិញ | អនុវត្តការកំណត់ម៉ាញេទិកឡើងវិញជាមួយនឹងឧបករណ៏ដែលបញ្ចូលទៅក្នុងឧបករណ៍វាយតម្លៃ។ |
| 4 | ស៊ីនុស និងកូស៊ីនុស | គ្រោងទិន្នផលស៊ីនុសធៀបនឹងទិន្នផលកូស៊ីនុស។ |
| 5 | កំណត់ហេតុទិន្នន័យ | បើកការកត់ត្រាទិន្នន័យរបស់ samples ។ |
| 6 | TMP (°C) | គឺជាការបង្ហាញឧបករណ៍ចាប់សញ្ញាសីតុណ្ហភាពខាងក្នុង |
| 7 | ការវាស់វែងចុងក្រោយ | បង្ហាញមុំចុងក្រោយ រាប់វេន និងបញ្ជរស៊ុម SPI ។ ការកំណត់អត្តសញ្ញាណឧបករណ៍ត្រូវបានធ្វើបច្ចុប្បន្នភាពនៅពេលចាប់ផ្តើមតែប៉ុណ្ណោះ។ |
| 8 | ទិន្នន័យចាប់យក | ផ្ទៃដីសម្រាប់ សampទិន្នន័យដឹកនាំ។ បង្ហាញចំនួនវេន មុំ និងតម្លៃវិនិច្ឆ័យដែលមាន។ |
| 9 | ប្រវែងបង្ហាញ | គ្រប់គ្រងចំនួនចំណុចទិន្នន័យដែលបង្ហាញនៅលើគ្រោងទិន្នន័យចាប់យក។ |
| 10 | ថាមពល | . គ្រប់គ្រងការអនុវត្តថាមពលទៅ ADMT4000 ។ |
| 11 | ឈប់ | ចាកចេញពី GUI |
| 12 | ស្ថានភាពឧបករណ៍ | សូចនាករដែលប្រែពណ៌ក្រហមប្រសិនបើទង់កំហុសត្រូវបានរកឃើញនៅលើស៊ុម SPI (មិនសកម្មសម្រាប់កម្មវិធីឧស្សាហកម្ម) កំហុសត្រួតពិនិត្យការបង្រ្កាបឡើងវិញ (CRC) ត្រូវបានរកឃើញនៅលើស៊ុម SPI ឬទង់កំហុសត្រូវបានកំណត់នៅក្នុងការចុះឈ្មោះ FAULT ។ |
| 13 | ជំនួយ (?) រូបតំណាង | អតីតមួយample នៃរូបតំណាងជំនួយដែលផ្តល់ព័ត៌មានបន្ថែមសម្រាប់អ្នកប្រើប្រាស់។ |
ការត្រួតពិនិត្យលំដាប់
តំបន់គ្រប់គ្រងលំដាប់នៅក្នុងផ្ទាំងការទិញយកទិន្នន័យអនុញ្ញាតឱ្យអ្នកប្រើប្រាស់កំណត់រចនាសម្ព័ន្ធរបៀបទទួល ADMT4000 ដូចខាងក្រោម៖
► នៅក្នុងម៉ឺនុយទម្លាក់ចុះ ប្រភេទការបម្លែង សូមជ្រើសរើសការទិញបន្ត ឬមួយ SHOT ទិញ។
► នៅក្នុងម៉ឺនុយទម្លាក់ចុះប្រភព CNV សូមជ្រើសរើសការចាប់ផ្តើមបំប្លែងដែលបង្កើតដោយកម្មវិធី ឬ CNV ដែលបានបង្កើតខាងក្រៅ។ សញ្ញា CNV ខាងក្រៅត្រូវបានបង្កើតឡើងដោយបន្ទះឧបករណ៍បញ្ជា SDP ។
► នៅក្នុងម៉ឺនុយទម្លាក់ចុះ បម្លែងការធ្វើសមកាលកម្ម ការប្រើប្រាស់ប្រភពខាងក្រៅដើម្បីធ្វើសមកាលកម្មការវាស់មុំគឺអាចប្រើបាន។
► នៅក្នុងម៉ឺនុយទម្លាក់ចុះនៃតម្រងមុំ បើក ឬបិទតម្រងមុំឆ្លើយតបដោយកម្លាំងគ្មានកំណត់ (IIR) ។
► នៅក្នុងម៉ឺនុយទម្លាក់ចុះអាម៉ូនិកទី 8 សូមជ្រើសរើសរវាងរោងចក្រកំណត់មេគុណអាម៉ូនិកទី 8 ឬមេគុណតម្លៃដែលកំណត់ដោយអ្នកប្រើប្រាស់នៅក្នុងការកំណត់រចនាសម្ព័ន្ធ ADMT4000 Config.csv file.
ប្រតិបត្តិការកម្មវិធី EVAL-ADMT4000SD1Z
ចាប់ផ្តើម
ប៊ូតុងចាប់ផ្តើមត្រូវបានប្រើដើម្បីចាប់ផ្តើម ឬផ្អាកការវាស់វែងតាមលំដាប់លំដោយ។ ចំណាំថាស្លាកនៅលើប៊ូតុងចាប់ផ្តើមផ្លាស់ប្តូរទៅផ្អាកនៅពេលដែលការទិញកំពុងដំណើរការ។
កំណត់ឡើងវិញ
ប៊ូតុង RESET ផ្តួចផ្តើមការកំណត់ម៉ាញេទិកឡើងវិញនៃឧបករណ៏វេនរាប់ដោយប្រើឧបករណ៏នៅលើ EVAL-ADMT4000SD1Z ដូចខាងក្រោម៖
► ចាប់ផ្តើមលំដាប់ការបំប្លែង។
►ចុចកំណត់ឡើងវិញ។
 រូបភាពទី 19. ការបង្ហាញទិន្នន័យដែលថតបានបង្ហាញពីមុំដែលទទួលបាន (ពណ៌ខៀវ) និងមុំអតិបរមា និងអប្បបរមា (ពណ៌ស្វាយ) នៃគោលដៅសម្រាប់ការកំណត់ម៉េញ៉ទិកឡើងវិញ
រូបភាពទី 19. ការបង្ហាញទិន្នន័យដែលថតបានបង្ហាញពីមុំដែលទទួលបាន (ពណ៌ខៀវ) និងមុំអតិបរមា និងអប្បបរមា (ពណ៌ស្វាយ) នៃគោលដៅសម្រាប់ការកំណត់ម៉េញ៉ទិកឡើងវិញ
► ការបង្ហាញទិន្នន័យដែលបានចាប់យកបន្ទាប់មកបង្ហាញការវាស់វែងមុំ និងមុំមុំ និងមុំអតិបរមា (សូមមើលរូបភាពទី 19)។
► បង្វិលមេដែករហូតដល់ការវាស់វែង ANGLE ស្ថិតក្នុងដែនកំណត់ដែលបង្ហាញក្នុងរូបភាពទី 19 ។
► ចុច Reset, Label 3 ក្នុងរូបភាពទី 18 ។
► នៅពេលដំណើរការក្នុងប្រភេទការបម្លែង ONE SHOT សូចនាករ Turn Count បង្ហាញតម្លៃជិតដល់ 46។ ចំណាំថាតម្លៃពិតប្រាកដអាស្រ័យទៅលើមុំពិតប្រាកដនៃមេដែក។
► នៅពេលដំណើរការក្នុងប្រភេទការបំប្លែងបន្ត អ្នកប្រើប្រាស់ត្រូវតែចាប់ផ្តើមលំដាប់ការបម្លែងឡើងវិញ ដើម្បីសង្កេតមើលចំនួនវេនកំណត់ឡើងវិញ។
► បង្វិលមេដែកច្រាសទ្រនិចនាឡិកា ដើម្បីសង្កេតមើលចំនួនវេនថយចុះ។
ស៊ីនុស និងកូស៊ីនុស
តំបន់នេះបង្ហាញពីទំហំនៃស៊ីនុសធៀបនឹងការវាស់វែងកូស៊ីនុស។
កំណត់ហេតុទិន្នន័យ
ផ្ទៃកំណត់ហេតុទិន្នន័យ រូបភាពទី 20 អនុញ្ញាតឱ្យអ្នកប្រើរក្សាទុកទិន្នន័យដែលបានចាប់យកទៅក្នុងកំណត់ហេតុ NI TDMS file ដូចតទៅ៖
 រូបភាពទី 20. ចាប់យកតំបន់កំណត់ហេតុទិន្នន័យនៃផ្ទាំងទទួលទិន្នន័យ
រូបភាពទី 20. ចាប់យកតំបន់កំណត់ហេតុទិន្នន័យនៃផ្ទាំងទទួលទិន្នន័យ
► មុខងាររក្សាទុកអាចត្រូវបានចាប់ផ្តើមមុន ឬកំឡុងពេលលំដាប់នៃការទិញ។ ចំណាំថាវាមិនរក្សាទុកទិន្នន័យណាមួយដែលប្រមូលដោយ GUI មុនពេលមុខងាររក្សាទុកត្រូវបានធ្វើឱ្យសកម្ម។
► ចុចរក្សាទុក (ស្លាកលេខ 1 ក្នុងរូបភាពទី 20) បន្ទាប់មកបង្អួចមួយនឹងលេចចេញមក។ អ្នកប្រើប្រាស់អាចកែប្រែ file ឈ្មោះ និងរក្សាទុកទីតាំងនៅក្នុងបង្អួចនេះ។ ធានាថា ស file ផ្នែកបន្ថែមគឺ .tdms ។
► នេះ។ file ផ្លូវសម្រាប់ទិន្នន័យដែលបានកត់ត្រាត្រូវបានបង្ហាញនៅក្នុងសូចនាករកំណត់ហេតុទិន្នន័យ (ស្លាកលេខ 2 ក្នុងរូបភាពទី 20) ហើយសូចនាករសកម្មរក្សាទុក (ស្លាកលេខ 3 ក្នុងរូបភាពទី 20) ផ្លាស់ប្តូរពីពណ៌បៃតងងងឹតទៅជាពណ៌បៃតងស្រាល។
► ដើម្បីបញ្ឈប់មុខងាររក្សាទុក សូមចុច រក្សាទុក (ស្លាកលេខ 1 ក្នុងរូបភាពទី 20)។
► សូចនាករសកម្មរក្សាទុក (ស្លាកលេខ 3 ក្នុងរូបភាពទី 20) បន្ទាប់មកប្តូរពីពណ៌បៃតងខ្ចីទៅជាពណ៌បៃតងងងឹត។
► ដើម្បីបង្កើនប្រសិទ្ធភាព TDMS fileGUI ធ្វើការ defragments ដោយស្វ័យប្រវត្តិ fileហើយវឌ្ឍនភាពនៃដំណើរការ defragmentation នេះត្រូវបានបង្ហាញនៅក្នុងរបារវឌ្ឍនភាព (សូមមើលស្លាកលេខ 4 ក្នុងរូបភាពទី 20)។
► ដើម្បីបើក file ទីតាំង ចុច VIEW (ស្លាកលេខ 5 ក្នុងរូបភាពទី 20) ។
TDMS file អាចត្រូវបាននាំចូលទៅ Excel ដោយប្រើ NI TDM Excel Add-In ឥតគិតថ្លៃសម្រាប់ Microsoft Excel ដែលអាចទាញយកបានពី NI webគេហទំព័រ។ កំណត់ហេតុ file រក្សាទុកការកំណត់រចនាសម្ព័ន្ធឧបករណ៍ ទិន្នន័យដែលបានវាស់វែង និងស្ថានភាពកំហុសសម្រាប់ការទិញនីមួយៗ។
ឧបករណ៍ចាប់សញ្ញាសីតុណ្ហភាព
សីតុណ្ហភាពប្រសព្វត្រូវបានរាយការណ៍ថាជាការបង្ហាញទែម៉ូម៉ែត្រ និងការបង្ហាញឌីជីថល។
ការវាស់វែងចុងក្រោយ
ទិន្នន័យមុំចុងក្រោយ និងចំនួនវេនត្រូវបានបង្ហាញនៅក្នុងតំបន់រង្វាស់ចុងក្រោយបំផុតនៃផ្ទាំងការទិញយកទិន្នន័យ (ស្លាកលេខ 7 ក្នុងរូបភាពទី 18)។
► សូចនាករមុំបង្ហាញទិន្នន័យ ANGLE ជាដឺក្រេ។
► សូចនាករចំនួនវេនបង្ហាញចំនួនវេន។
► សូចនាករ Counter បង្ហាញចំនួនស៊ុម SPI ។
► សូចនករកំណត់អត្តសញ្ញាណផ្នែកបង្ហាញអត្តសញ្ញាណតែមួយគត់នៃឧបករណ៍ដែលភ្ជាប់ទៅ EVAL-ADMT4000SD1Z ។
ទិន្នន័យចាប់យក
ផ្នែកទិន្នន័យដែលបានចាប់យក (ស្លាកលេខ 8 ក្នុងរូបភាពទី 18) បង្ហាញប្រវត្តិនៃការទទួលបានទិន្នន័យ។ ប្រអប់ធីកនៅលើរឿងព្រេងគ្រោងអាចគ្រប់គ្រងភាពមើលឃើញនៃធាតុទិន្នន័យនៅលើគ្រោង។ ចំណាំថាទិន្នន័យដែលបានកត់ត្រាមានទិន្នន័យទាំងអស់ដែលបង្ហាញនៅក្នុងរឿងព្រេងគ្រោងដោយមិនគិតពី
ស្ថានភាពនៃប្រអប់ធីកនៅជាប់នឹងឈ្មោះគ្រោង។
ប្រវែងបង្ហាញ
ការត្រួតពិនិត្យប្រវែងបង្ហាញ (ស្លាកលេខ 9 ក្នុងរូបភាពទី 18) ត្រូវបានប្រើដើម្បីគ្រប់គ្រងចំនួនចំណុចទិន្នន័យដែលបង្ហាញនៅលើគ្រោងទិន្នន័យចាប់យក។
ថាមពល
ចុចថាមពល (ស្លាកលេខ 10 ក្នុងរូបភាពទី 18) ដើម្បីគ្រប់គ្រងរបៀបថាមពលរបស់ ADMT4000.
 រូបភាពទី 21. ប៊ូតុងថាមពល
រូបភាពទី 21. ប៊ូតុងថាមពល
GUI ព្យាយាមអានពី ADMT4000 ដោយមិនគិតពីស្ថានភាពថាមពលរបស់វា។
ឈប់
ចុចបញ្ឈប់ (ស្លាកលេខ 11 ក្នុងរូបភាពទី 18) ដើម្បីបញ្ឈប់ និងចេញពី GUI ។
ស្ថានភាពឧបករណ៍
សូចនាករស្ថានភាពកំហុសចំនួនបីខាងក្រោម (ស្លាកលេខ 13 ក្នុងរូបភាពទី 18) នៅក្នុងតំបន់ស្ថានភាពឧបករណ៍បង្ហាញរូបចម្លាក់កំហុសនៃស៊ុម SPI ចុងក្រោយបំផុត៖
► Fault Register បង្ហាញថាទង់មួយត្រូវបានកំណត់នៅក្នុង FAULT register។
► SPI CRC បង្ហាញប្រសិនបើកំហុសរបស់ស៊ុម SPI CRC ត្រូវបានរកឃើញ។
► SPI Flag គឺជាទង់កំហុសដែលមាននៅក្នុងស៊ុម ADMT4000 SPI ដែលបង្ហាញថាទង់មួយត្រូវបានកំណត់នៅក្នុងការចុះឈ្មោះ FAULT នៃ ADMT4000។
ជំនួយ
មានប៊ូតុងជំនួយជាច្រើនដែលត្រូវបានចែកចាយជុំវិញ ADMT4000 Evaluation GUI ឧទាហរណ៍ample សូមមើលស្លាកលេខ 13 ក្នុងរូបភាពទី 18 ។ មុខងារជំនួយដូចជាកម្មវិធីនេះត្រូវបានរចនាឡើងដើម្បីជួយអ្នកប្រើប្រាស់ជាមួយនឹងមុខងារដែលបានជ្រើសរើស។
ផ្ទាំងឧបករណ៍ប្រើប្រាស់
ផ្ទាំងឧបករណ៍ប្រើប្រាស់ (សូមមើលរូបភាពទី 22) ផ្តល់សិទ្ធិចូលប្រើការចុះឈ្មោះ FAULT និងអនុញ្ញាតឱ្យគ្រប់គ្រង GPIOs នៃ ADMT4000 បន្ថែមពីលើធនធានផ្សេងទៀតដែលត្រូវបានរៀបរាប់នៅក្នុងផ្នែកខាងក្រោម។
 រូបភាពទី 22. ផ្ទាំងឧបករណ៍ប្រើប្រាស់
រូបភាពទី 22. ផ្ទាំងឧបករណ៍ប្រើប្រាស់
តារាងទី 11 ផ្តល់ការពិពណ៌នាអំពីស្លាកនៅក្នុងផ្ទាំងឧបករណ៍ប្រើប្រាស់ (សូមមើលរូបភាពទី 22)។
តារាងទី 11. ការពិពណ៌នាសម្រាប់ស្លាកឧបករណ៍ប្រើប្រាស់
| លេខស្លាក | ឈ្មោះស្លាក | ការពិពណ៌នា |
| 1 | កំណត់ហេតុពាក្យបញ្ជា | កត់ត្រាពាក្យបញ្ជា SPI ដែលបង្កើតដោយ GUI |
| 2 | មុខងារ DIGIO | បើកការគ្រប់គ្រងមុខងារច្រក GPIO |
| 3 | ម៉ូនីទ័រ GPIO | GPIO ស្ថានភាពបច្ចុប្បន្ន |
| 4 | ការចុះឈ្មោះកំហុស | ស្ថានភាពចុះឈ្មោះ FAULT |
| 5 | ប្រេកង់នាឡិកា SPI (Hz) | ការត្រួតពិនិត្យប្រេកង់នាឡិកា SPI |
| 6 | ការកំណត់រចនាសម្ព័ន្ធអ្នកប្រើប្រាស់ | ការគ្រប់គ្រងការកំណត់រចនាសម្ព័ន្ធអ្នកប្រើប្រាស់ |
កំណត់ហេតុពាក្យបញ្ជា
កំណត់ហេតុពាក្យបញ្ជា (ស្លាកលេខ 1 ក្នុងរូបភាពទី 22) អាចចាប់យកពាក្យបញ្ជា SPI ដែលចេញដោយ GUI សម្រាប់គ្រប់គ្រង ADMT4000 ។ ដើម្បីបើកមុខងារនេះ សូមជ្រើសរើសប្រអប់ធីក បើកដំណើរការកំណត់ត្រា។ ចុច SAVE ដើម្បីរក្សាទុកកំណត់ហេតុ ហើយចុចលើរូបតំណាង Recycle Bin ដើម្បីសម្អាតកំណត់ហេតុ។
មុខងារ DIGIO
ច្រក GPIO នៅលើ ADMT4000 អាចត្រូវបានកំណត់រចនាសម្ព័ន្ធជាមួយនឹងការគ្រប់គ្រងមុខងារ DIG-IO (ស្លាកលេខ 2 ក្នុងរូបភាព 22)។ នៅពេលដែល GUI ការវាយតម្លៃ ADMT4000 ចាប់ផ្តើម ច្រក GPIO កើនឡើង យោងទៅតាមការកំណត់រចនាសម្ព័ន្ធ ADMT4000 Config.csv file. ចំណាំថាវាអាចជ្រើសរើសមុខងារនៅក្នុងម៉ឺនុយទម្លាក់ចុះនៃច្រក ដើម្បីផ្លាស់ប្តូរប្រតិបត្តិការនៃច្រកទាំងនេះ។
ម៉ូនីទ័រ GPIO
ម៉ូនីទ័រ GPIO (ស្លាកលេខ 3 ក្នុងរូបភាពទី 22) បង្ហាញកម្រិតតក្កវិជ្ជាបច្ចុប្បន្ននៃច្រក GPIO ។ ពណ៌បៃតងខ្ចីបង្ហាញពីស្ថានភាពខ្ពស់នៅលើច្រក ហើយពណ៌បៃតងងងឹតបង្ហាញពីស្ថានភាពទាប។
ការចុះឈ្មោះកំហុស
ការចុះឈ្មោះ FAULT (ស្លាកលេខ 4 ក្នុងរូបភាពទី 22) បង្ហាញស្ថានភាពចុងក្រោយបំផុតនៃការចុះឈ្មោះ FAULT នៃ ADMT4000 ពណ៌ក្រហមស្រាលបង្ហាញថាទង់ FAULT ត្រូវបានកំណត់ ហើយពណ៌ក្រហមងងឹតបង្ហាញថាមានកំហុសត្រូវបានរកឃើញ។ នៅក្នុងរូបភាពទី 22 ការចុះឈ្មោះ FAULT បង្ហាញថាគ្មានកំហុសត្រូវបានរកឃើញទេ។
ប្រេកង់នាឡិកា SPI (Hz)
ដើម្បីកែប្រែនាឡិកា SDP SPI ធ្វើបច្ចុប្បន្នភាពប្រអប់ SPI Clock Frequency (Hz) (ស្លាកលេខ 5 ក្នុងរូបភាពទី 22)។
ការកំណត់រចនាសម្ព័ន្ធអ្នកប្រើប្រាស់
ដើម្បីបង្ហោះការកំណត់រចនាសម្ព័ន្ធ file នៅពេលណាក៏បាន ចូលទៅកាន់តំបន់កំណត់រចនាសម្ព័ន្ធអ្នកប្រើប្រាស់នៃផ្ទាំងឧបករណ៍ប្រើប្រាស់ (ស្លាកលេខ 6 ក្នុងរូបភាពទី 22) ហើយធ្វើដូចខាងក្រោមៈ
► ជ្រើសរើសការកំណត់អ្នកប្រើប្រាស់ដែលត្រូវការ file.
► ចុច Upload ។
►នៅពេលដែលការកំណត់រចនាសម្ព័ន្ធ file ផ្ទុកឡើង ADMT4000 ត្រូវបានកំណត់រចនាសម្ព័ន្ធឡើងវិញ។ ចំណាំថាបង្អួច Read Reg Report បង្ហាញស្ថានភាពរបស់អ្នកប្រើប្រាស់ចុះឈ្មោះបន្ទាប់ពីការកំណត់រចនាសម្ព័ន្ធឡើងវិញ។
ការកំណត់រចនាសម្ព័ន្ធ File
ការកំណត់រចនាសម្ព័ន្ធ file សម្រាប់ EVAL-ADMT4000SD1Z មានការកំណត់ការចាប់ផ្តើម GUI ការវាយតម្លៃ ADMT4000 ដែលកំណត់ ADMT4000 ទៅជាស្ថានភាពកំណត់ដោយអ្នកប្រើប្រាស់នៅពេលចាប់ផ្តើមកម្មវិធី។ ឈ្មោះចុះឈ្មោះមិនអាចផ្លាស់ប្តូរបានទេ។ ទោះយ៉ាងណាក៏ដោយ អ្នកប្រើប្រាស់មានសេរីភាពក្នុងការកែប្រែការកំណត់ចុះឈ្មោះដែលធ្វើតាមឈ្មោះចុះឈ្មោះ។ នេះ។ file ត្រូវតែរក្សាទុកក្នុងទម្រង់ *.csv ដែលបំបែកដោយសញ្ញាក្បៀស។
ខ្លឹមសារនៃការកំណត់រចនាសម្ព័ន្ធដែលបានផ្គត់ផ្គង់ file (ADMT4000 Config.csv) មានខ្លឹមសារដូចខាងក្រោម៖

ផ្ទាំងក្រិត
ផ្ទាំង Calibration អនុញ្ញាតឱ្យអ្នកប្រើប្រាស់ចូលប្រើមុខងារ Calibration របស់ ADMT4000។ ដើម្បីធ្វើការក្រិតតាមខ្នាត ADMT4000 ត្រូវតែកំណត់រចនាសម្ព័ន្ធនៅក្នុងប្រព័ន្ធដែលមានម៉ូទ័រដែលមានចុងមេដែកដែលមិនត្រូវបានផ្តល់ឱ្យនៅក្នុងឧបករណ៍វាយតម្លៃ។ ឧបករណ៏ ADMT4000 ត្រូវតែតម្រឹមយ៉ាងត្រឹមត្រូវជាមួយនឹងចំណុចកណ្តាលនៃអ័ក្សម៉ូទ័រ និងចំណុចកណ្តាលនៃមេដែក។
ដំណើរការក្រិតតាមខ្នាតនៅក្នុង GUI មានជំហានដូចខាងក្រោមៈ
- ធ្វើឱ្យម៉ូទ័រសកម្មជាមួយនឹងល្បឿនបន្ត។
- ប្រមូលការក្រិតតាមខ្នាត sampទិន្នន័យ។
- បង្កើតមេគុណនៃការក្រិតតាមខ្នាត។
- សាកល្បងដំណើរការមុំជាមួយមេគុណក្រិត។
- កំណត់រចនាសម្ព័ន្ធ ADMT4000 ជាមួយនឹងមេគុណក្រិតដែលបានបង្កើត។
មេគុណការក្រិតមានការកែប្រព័ន្ធសម្រាប់អាម៉ូនិកទី 1 ទី 2 ទី 3 និងទី 8 នៃ sampទិន្នន័យដឹកនាំ។ កំហុសអាម៉ូនិកត្រូវបានផលិតដោយការអត់ធ្មត់របស់ប្រព័ន្ធ រួមទាំងការផ្លាស់ទីលំនៅអ័ក្ស x និង y រវាងឧបករណ៏ និងមេដែក។
អ្នកប្រើប្រាស់អាចពិនិត្យមើលលទ្ធផលនៃការក្រិតតាមខ្នាត និងកំណត់រចនាសម្ព័ន្ធ ADMT4000 ឡើងវិញជាមួយនឹងមេគុណដែលបានបង្កើត។
 រូបភាពទី 23. ផ្ទាំងក្រិត
រូបភាពទី 23. ផ្ទាំងក្រិត
ផ្ទាំង Calibration ត្រូវបានបង្ហាញក្នុងរូបភាពទី 23។ តារាងទី 12 ផ្តល់នូវការពិពណ៌នាអំពីស្លាកនៅក្នុងផ្ទាំង Calibration (សូមមើលរូបភាពទី 23)។
តារាងទី 12. ការពិពណ៌នាអំពីស្លាកផ្ទាំងក្រិត
| លេខស្លាក | ឈ្មោះស្លាក | ការពិពណ៌នា |
| 1 | ប្រភពទិន្នន័យ Calibration | គ្រប់គ្រងប្រភពនៃទិន្នន័យក្រិត |
| 2 | Sampគ្រប់គ្រង | គ្រប់គ្រងម៉ូទ័រខាងក្រៅ rpm, ចំនួននៃការបង្វិលសម្រាប់ម៉ូទ័រ, ចំនួនសរុបនៃ Samples to Acquire, Samples per Rotation និង Sampប្រេកង់ le (Hz) |
| 3 | នៅក្នុងសូចនាករជួរ | ប្រែពីបៃតងងងឹតទៅជាបៃតងស្រាលនៅពេលដែលសampការកំណត់រចនាសម្ព័ន្ធត្រូវបានជ្រើសរើស |
| 4 | ចាប់ផ្តើម | ចាប់ផ្តើមទម្លាប់នៃការក្រិតតាមខ្នាត |
| 5 | ការក្រិត Samples | គំនូសតាង សampទិន្នន័យដែលបានប្រើដើម្បីគណនាមេគុណ |
| 6 | ក្រាហ្វកំហុសជ្រុង PreCal | ផ្ទៃគ្រោងសម្រាប់ទិន្នន័យកំណត់ទុកជាមុន និងបង្ហាញកំហុសជ្រុងនៃប្រព័ន្ធនៅក្នុងដែនប្រេកង់ និងដែនពេលវេលា |
| 7 | ក្រាហ្វកំហុស PostCal Angular | ផ្ទៃគ្រោងសម្រាប់ទិន្នន័យក្រោយការក្រិតតាមខ្នាត និងបង្ហាញកំហុសជ្រុងប្រព័ន្ធនៅក្នុងដែនពេលវេលា ឬដែនប្រេកង់ |
| 8 | ការក្រិតតាមខ្នាតដែលបានគណនា | បង្ហាញមេគុណនៃការក្រិតតាមខ្នាតពីការគណនាទម្លាប់នៃការក្រិតតាមខ្នាតចុងក្រោយ |
| 9 | ទិន្នន័យ Cal | ចុច Cal Data ដើម្បីរក្សាទុក sampទិន្នន័យទៅ ក file |
| 10 | កំណត់រចនាសម្ព័ន្ធ | ចុច Config ដើម្បីកំណត់រចនាសម្ព័ន្ធ ADMT4000 ឡើងវិញជាមួយនឹងមេគុណនៃការក្រិតតាមខ្នាតចុងក្រោយបង្អស់ |
ប្រភពទិន្នន័យ Calibration
ដើម្បីធ្វើការក្រិតតាមខ្នាតអ្នកប្រើប្រាស់ EVAL-ADMT4000SD1Z ត្រូវតែកំណត់រចនាសម្ព័ន្ធជាមួយម៉ូទ័រ ហើយការគ្រប់គ្រងប្រភពទិន្នន័យ Calibration ត្រូវតែកំណត់ទៅ ADMT4000។
របៀបប្រតិបត្តិការបន្ថែមពីរខាងក្រោមសម្រាប់ទម្លាប់នៃការក្រិតតាមខ្នាតគឺអាចរកបាន ហើយអាចត្រូវបានជ្រើសរើសនៅក្នុងការគ្រប់គ្រងប្រភពទិន្នន័យ Calibration៖
► User Harmonic Coefficients អនុញ្ញាតឱ្យអ្នកប្រើបញ្ចូលមេគុណផ្ទាល់ខ្លួន (សូមមើលផ្នែក Calibration ដែលបានគណនា) និងសង្កេតមើលកំហុសលទ្ធផល។ ទោះយ៉ាងណាក៏ដោយ ម៉ូទ័រត្រូវបានទាមទារសម្រាប់មុខងារនេះ។
► ឧample Data ផ្តល់នូវសំណុំទិន្នន័យធម្មតា។ ការបំប្លែង Fourier លឿន (FFT) និងមេគុណនៃការក្រិតតាមខ្នាតដែលបានគណនាត្រូវបានបង្ហាញនៅក្នុង ADMT4000 Evaluation GUI ។ ចំណាំថាក្នុងករណីនេះ ការក្រិតតាមខ្នាតក្រោយមិនអាចបង្ហាញបានទេ។
Sampឡេគ្រប់គ្រង
កំណត់រចនាសម្ព័ន្ធ sampតំបន់គ្រប់គ្រងនៅពេលដែល GUI ដំណើរការជាមួយម៉ូទ័រ ដូចខាងក្រោម៖
► External Motor rpm គឺជាល្បឿននៃម៉ូទ័រខាងក្រៅ។
►ចំនួននៃការបង្វិលគឺជាចំនួននៃការបង្វិលដែលប្រើដើម្បីចាប់យកទិន្នន័យមុំពី ADMT4000។
► សamples to Acquire គឺជាចំនួនសរុបនៃ samples ដើម្បីទទួលបាន។
► សamples per Rotation គឺជាចំនួនសរុបនៃ samples ក្នុងមួយបង្វិល។
► សample Freq (Hz) គឺជា sample ប្រេកង់គិតជា Hz ។
វាត្រូវបានណែនាំថាការបង្វិលម៉ាញេទិកចំនួន 11 ត្រូវបានប្រើសម្រាប់ទម្លាប់នៃការក្រិតតាមខ្នាត។ ចំនួនសរុបនៃ samples ដែលចាប់បានឆ្លងកាត់ការបង្វិល 11 ត្រូវតែជាថាមពល 2 ដើម្បីធានាបាននូវ FFT ដែលជាប់គ្នា។ ចំនួនសរុបអប្បបរមាដែលបានណែនាំamples គឺ 2¹⁰ (1024) នៅទូទាំង 11 ការបង្វិល។ វាជាការសំខាន់ក្នុងការកត់សម្គាល់ថាក្នុងអំឡុងពេលដំណើរការក្រិតមេដែកត្រូវតែបើកក្នុងល្បឿនថេរ។ បើមិនដូច្នេះទេ កំហុសល្បឿនម៉ូទ័របន្ថែមទៅកំហុសមុំ។
សូចនាករក្នុងជួរ (ស្លាកលេខ 3 ក្នុងរូបភាពទី 23) ប្រែពីពណ៌បៃតងងងឹតទៅជាពណ៌បៃតងស្រាល នៅពេលដែលសញ្ញាត្រឹមត្រូវampការកំណត់រចនាសម្ព័ន្ធត្រូវបានជ្រើសរើស។
ចាប់ផ្តើម
ចុច Start ដើម្បីចាប់ផ្តើមដំណើរការក្រិត។ មុនពេលចុចចាប់ផ្តើម សូមប្រាកដថាម៉ូទ័រខាងក្រៅបានដល់ស្ថានភាពស្ថិរភាព មុនពេលចាប់ផ្តើមដំណើរការក្រិត។
ការក្រិត Samples
ការក្រិតតាមខ្នាត Samples plot បង្ហាញស៊ីនុស និងកូស៊ីនុសដែលបានចាប់យកនៅក្នុងលេខកូដ ADC និងមុំគណនាពីស៊ីនុស និងកូស៊ីនុស។
ក្រាហ្វកំហុសជ្រុង PreCal
PreCal Angular Error Graph បង្ហាញ FFT នៃទិន្នន័យដែលបានចាប់យក ឬ FFT នៃទិន្នន័យដែលបានផ្គត់ផ្គង់នៅក្នុង exampទិន្នន័យ file.
ក្រាហ្វកំហុស PostCal Angular
PostCal Angular Error Graph បង្ហាញ FFT នៃ ADMT4000 ជាមួយនឹងមេគុណគណនាដែលបានកំណត់រចនាសម្ព័ន្ធ។
ការក្រិតតាមខ្នាតគណនា
តំបន់ក្រិតតាមខ្នាតដែលបានគណនាមានផ្ទាំងមួយដែលអាចឱ្យអ្នកប្រើប្រាស់សង្កេតមើលមេគុណដែលបានគណនាជាដឺក្រេ ឬលេខកូដ HEX ដែលប្រើដើម្បីកំណត់រចនាសម្ព័ន្ធការចុះឈ្មោះមេគុណនៃការក្រិតតាមខ្នាត ADMT4000។
នៅពេលដែលមេគុណអាម៉ូនិករបស់អ្នកប្រើប្រាស់ត្រូវបានជ្រើសរើសនៅក្នុងតំបន់ត្រួតពិនិត្យប្រភពទិន្នន័យ Calibration នោះអ្នកប្រើប្រាស់អាចបញ្ចូលតម្លៃទៅក្នុងផ្ទាំងកូដ HEX នៃតំបន់ Calibration ដែលបានគណនា។ នៅពេលដែលការក្រិតតាមខ្នាតដំណើរការនៅក្នុងរបៀបនេះ លទ្ធផលនៃកំហុសមុំបង្ហាញជាមួយអ្នកប្រើប្រាស់
មេគុណ។
ទិន្នន័យ Cal
ដោយធ្វើតាមទម្លាប់នៃការក្រិតតាមខ្នាត សូមចុច Cal Data ដើម្បីរក្សាទុកទិន្នន័យដែលបានចាប់យក។
ការកំណត់រចនាសម្ព័ន្ធ
ចុច Config ដើម្បីធ្វើបច្ចុប្បន្នភាព ADMT4000 ជាមួយនឹងមេគុណនៃការក្រិតតាមខ្នាតដែលបានបញ្ចូលទៅក្នុងផ្ទៃត្រួតពិនិត្យការក្រិតតាមខ្នាតដែលបានគណនា។
គ្រោងការណ៍និងវិមាត្រក្តារ
គ្រោងការណ៍ PCB សម្រាប់ EVAL-ADMT4000SD1Z ត្រូវបានបង្ហាញក្នុងរូបភាពទី 24 និងរូបភាពទី 25 ។ វិមាត្រ PCB ត្រូវបានបង្ហាញក្នុងរូបភាពទី 26 ។ ទីតាំងរបស់ឧបករណ៍ចាប់សញ្ញា AMR ត្រូវតែនៅជិតបំផុតតាមដែលអាចធ្វើទៅបានទៅកណ្តាលនៃអ័ក្សបង្វិល។
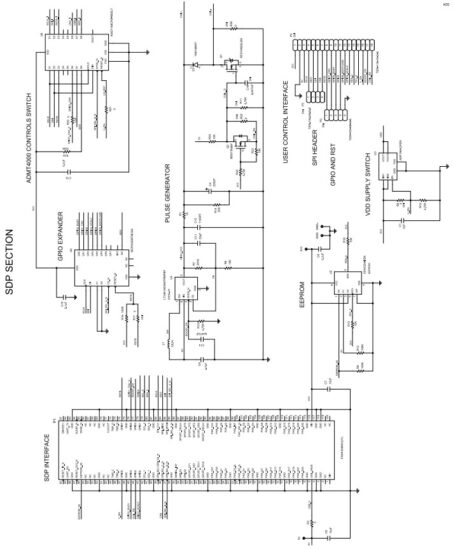 រូបភាពទី 24. EVAL-ADMT4000SD1Z, SDP Interface Schematic
រូបភាពទី 24. EVAL-ADMT4000SD1Z, SDP Interface Schematic រូបភាពទី 25. EVAL-ADMT4000SD1Z, Board Break Off Section Schematic
រូបភាពទី 25. EVAL-ADMT4000SD1Z, Board Break Off Section Schematic រូបភាពទី 26. វិមាត្រ EVAL-ADMT4000SD1Z, ឯកតាមានមិល្លីម៉ែត្រ [អ៊ីញ]
រូបភាពទី 26. វិមាត្រ EVAL-ADMT4000SD1Z, ឯកតាមានមិល្លីម៉ែត្រ [អ៊ីញ]
សម្រាប់ព័ត៌មានលម្អិតអំពីទីតាំងរបស់ឧបករណ៍ចាប់សញ្ញានៅក្នុងកញ្ចប់ សូមយោងទៅសន្លឹកទិន្នន័យ ADMT4000។ យោងទៅលេខស្លាកក្នុងរូបភាពទី 26 ស្លាកលេខ 1 បង្ហាញរន្ធសម្រាប់ភ្ជាប់ SDP ។
ទំហំរន្ធម៉ោនត្រូវបានបង្ហាញក្នុងរូបភាពទី 26 និងតារាងទី 13 ។
តារាង 13. វិមាត្ររន្ធម៉ោន EVAL-ADMT4000SD1Z
| និមិត្តសញ្ញា | អង្កត់ផ្ចិត (មម) | ការដាក់ចាន |
| A | 2.2 | ដែលមិនលាប |
| B | 3.175 | ដែលមិនលាប |
| C | 3.2 | ដែលមិនលាប |
បញ្ជាទិញព័ត៌មាន
ពាន់លានសំភារៈ
តារាងទី 14. វិក័យប័ត្រសម្ភារៈ
| សមាសភាគ | ការពិពណ៌នា | ក្រុមហ៊ុនផលិត | លេខផ្នែក |
| C1, C2 | ឧបករណ៍បំប្លែងសេរ៉ាមិច 1 µF, 10 V, 5%, X8L, 0805, AEC-Q200 | ខេមិត | C0805C105J8NACAUTO |
| C3, C8, C13 | ឧបករណ៍បំប្លែងសេរ៉ាមិច 0.1 µF, 35 V, 10%, X7R, 0402, AEC-Q200 | TDK | CGA2B3X7R1V104K050BB |
| C4 | ESR ទាប | វិស្យា | MAL216099103E3 |
| 220 µF អាលុយមីញ៉ូអេឡិចត្រូលីត capacitor, 50 V, 20%, 12.5 mm | |||
| × 16 មម, AEC-Q200, 550 mA | |||
| C5, C7 | ឧបករណ៍បំប្លែងសេរ៉ាមិច 10 µF, 6.3 V, 20%, X7R, 0603 | ក្រុមហ៊ុន Samsung | CL10B106MQ8NRNC |
| C6, C10, C15, C18, C19 | ឧបករណ៍បំប្លែងសេរ៉ាមិច 0.1 µF, 50 V, 10%, X8R, 0603, AEC-Q200 | TDK | CGA3E3X8R1H104K080AB |
| C9 | កុងទ័រសេរ៉ាមិច 4.7 µF, 16 V, 5%, X7R, 0805, AEC-Q200 | ខេមិត | C0805X475J4RACAUTO |
| C11 | 22 pF សេរ៉ាមិច capacitor, 100 V, 5%, C0G, 0603, AEC-Q200 | TDK | CGA3E2NP02A220J080AA |
| C12 | 1100 pF ceramic capacitor, 50 V, 1%, X8G, 0603, AEC-Q200 | មូរ៉ាតា | GCM1885G1H112FA16D |
| C14 | 0.047 µF capacitor សេរ៉ាមិច, 25 V, 10%, X8R, 0402, AEC-Q200, ការបញ្ចប់ទន់ | TDK | CGA2B1X8R1E473K050BE |
| C16 | 0.047 µF សេរ៉ាមិច capacitor, 0.047 µF, 25 V, 10% X8R, 0402, AEC-Q200 |
TDK | CGA2B1X8R1E473K050BE |
| C17 | 2 pF សេរ៉ាមិច capacitor, 25 V, 0.1 pF, C0G, 0402 | AXV | 04023U2R0BAT2A |
| D1 | Diode, ការផ្លាស់ប្តូរលឿន conductance ខ្ពស់។ | Fairchild Semiconductor | 1N914BWT |
| DS1, DS2 | ឌីយ៉ូត, ពន្លឺខ្ពស់, ចរន្តទាប, ឌីយ៉ូដបញ្ចេញពន្លឺ (LED), ពណ៌បៃតង | Osram Opto Semiconductors | LGL29K-G2J1-24-Z |
| L1 | អាំងឌុចទ័រ, ខ្សែលួស, 15 μH, 10%, 2.52 MHz, 0.6 A, 0.5 Ω, 1812, AEC-Q200 | TDK | B82432T1153K000 |
| P1 | 120-ទីតាំង board to board connector recepticle, pitch 0.6 mm | HR | FX8-120S-SV(21) |
| P3 | បន្ទះក្បាល PCB 4 ទីតាំង, ទីលាន 0.100 អ៊ីញ | សាមសា។ | TSW-104-08-GS |
| P2 | បន្ទះក្បាល PCB 5 ទីតាំង, ទីលាន 0.100 អ៊ីញ | សាមសា។ | TSW-105-08-GS |
| P4 | បន្ទះក្បាល PCB 18 ទីតាំង, ទីលាន 0.100 អ៊ីញ | សាមសា។ | TSW-118-16-GS |
| P5, P6 | ក្បាលដី 2-ទីតាំង PCB, ទីលាន 0.100 អ៊ីញ | Ampហេណុល | 9157-102HLF |
| P7 | ក្បាល PCB 15 ទីតាំង មុំខាងស្តាំ 0.100″ ជម្រេ | ម៉ូលេក | ០១៤៨៦០៧៤-០០៤ |
| Q1 | N-channel MOSFET, 14 A, 50 V, 3-pin DPAK | Onsemi | RFD14N05LSM |
| Q2 | N-channel MOSFET, 200 mA, 50 V, 3-pin SOT-23 | Diodes រួមបញ្ចូល | BSS138-7-F |
| R1 | 1 kΩ SMD resistor, 1%, 1/8 W, 0805, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-6ENF1001V |
| R2 | 0.005 Ω SMD resistor, 1%, 2 W, 2512, ស្ថានីយធំទូលាយ | អូមមីត | LVK25R005FER |
| R3, R6, R17, R20, R21, R25, | 0 Ω SMD resistors, jumper, 1/10 W, 0402, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-2GE0R00X |
| R26 ទៅ R28, R31, R4, R9, R12, R16, R19, R29, R30, R34 ទៅ R37, R40 ទៅ R42 | 100 kΩ SMD resistors, 5%, 1/10 W, 0402, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-2GEJ104X |
| R5, R33 | 1.5 kΩ SMD resistors, 1%, 1/10 W, 0603, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-3EKF1501V |
| R7 | 261 kΩ SMD resistor, 0.1%, 1/8 W, 0805, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERA-6AEB2613V |
| R8 | 10 kΩ SMD resistor, 0.1%, 1/8 W, 0805, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERA-6AEB103V |
| R10, R11, R15, R22 | 4.75 kΩ SMD resistors, 1%, 1/10 W, 0402, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-2RKF4751X |
| R13, R18 | 10 kΩ SMD resistors, 1%, 1/8 W, 0805, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-6ENF1002V |
| R14 | 20 kΩ SMD resistor, 1%, 1/8 W, 0805, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-6ENF2002V |
| R23, R24 | 10 kΩ SMD resistors, 5%, 1/10 W, 0603, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-3GEYJ103V |
| R32 | 0.1 Ω SMD resistor, 1%, 1/6 W, 0402, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-2BSFR10X |
| R38, R39 | 1 MΩ SMD resistors, 1%, 1/10 W, 0603, AEC-Q200 | ក្រុមហ៊ុន Panasonic | ERJ-3EKF1004V |
| U1 | ឧបករណ៍ចាប់សញ្ញាបើកភ្លើងច្រើនពិត | ឧបករណ៍អាណាឡូក | ADMT4000BRUZAB |
| U2 | IC 32 kBIT ស៊េរី EEPROM | បច្ចេកវិទ្យាមីក្រូឈីប | 24AA32A-I/SN |
| U3 | 5 V, 3 កុងតាក់ថាមពលចំហៀងខ្ពស់ដែលគ្រប់គ្រងដោយតក្កវិជ្ជា | ឧបករណ៍អាណាឡូក | ADP196ACPZN-R7 |
| U4 | ឧបករណ៍បំលែង DC/DC ជំហាន 3 MHz ជាមួយ Schottky រួមបញ្ចូលគ្នានៅក្នុង SOT ស្តើង | ឧបករណ៍អាណាឡូក L | LT3461AES6#TRMPBF |
| U5 | IC expander serial peripheral interface (SPI), ការបញ្ចូល និងទិន្នផលគោលបំណងទូទៅ (GPIO), 8 ប៊ីត | បច្ចេកវិទ្យាមីក្រូឈីប | MCP23S08T-E/SS |
| U6 | CMOS, វ៉ុលទាបtage, SPI/QSPI/Microwire-compatible ចំណុចប្រទាក់, កុងតាក់ SPST octal, គ្រប់គ្រងដោយស៊េរី |
ឧបករណ៍អាណាឡូក | ADG714BCPZ-REEL7 |
![]() ការប្រុងប្រយ័ត្ន ESD
ការប្រុងប្រយ័ត្ន ESD
ឧបករណ៍រសើប ESD (ការឆក់អគ្គិសនី) ។ ឧបករណ៍សាកថ្ម និងបន្ទះសៀគ្វីអាចបញ្ចេញដោយមិនចាំបាច់រកឃើញ។ ទោះបីជាផលិតផលនេះមានលក្ខណៈពិសេសសៀគ្វីការពារដែលមានប៉ាតង់ ឬមានកម្មសិទ្ធិក៏ដោយ ការខូចខាតអាចកើតឡើងលើឧបករណ៍ដែលទទួលរងនូវ ESD ថាមពលខ្ពស់។ ដូច្នេះ ការប្រុងប្រយ័ត្ន ESD ត្រឹមត្រូវគួរតែត្រូវបានអនុវត្ត ដើម្បីជៀសវាងការថយចុះនៃការអនុវត្ត ឬការបាត់បង់មុខងារ។
ល័ក្ខខ័ណ្ឌច្បាប់
ដោយប្រើក្រុមប្រឹក្សាវាយតម្លៃដែលបានពិភាក្សានៅទីនេះ (រួមជាមួយនឹងឧបករណ៍ណាមួយ ឯកសារសមាសធាតុ ឬសម្ភារៈជំនួយ "ក្រុមប្រឹក្សាវាយតម្លៃ") អ្នកយល់ព្រមនឹងចងភ្ជាប់ដោយលក្ខខណ្ឌដែលមានចែងខាងក្រោម ("កិច្ចព្រមព្រៀង") លុះត្រាតែអ្នកបានទិញ ក្រុមប្រឹក្សាវាយតម្លៃ នៅក្នុងករណីដែលលក្ខខណ្ឌស្តង់ដារនៃឧបករណ៍អាណាឡូក និងលក្ខខណ្ឌនៃការលក់ត្រូវគ្រប់គ្រង។ កុំប្រើក្រុមប្រឹក្សាវាយតម្លៃរហូតដល់អ្នកបានអាន និងយល់ព្រមលើកិច្ចព្រមព្រៀង។ ការប្រើប្រាស់ក្រុមប្រឹក្សាវាយតម្លៃរបស់អ្នកនឹងបញ្ជាក់ពីការទទួលយកកិច្ចព្រមព្រៀងរបស់អ្នក។ កិច្ចព្រមព្រៀងនេះធ្វើឡើងដោយ និងរវាងអ្នក ("អតិថិជន") និងឧបករណ៍អាណាឡូក, Inc. (“ADI”) ដោយមានទីតាំងអាជីវកម្មចម្បងរបស់ខ្លួន អាស្រ័យតាមលក្ខខណ្ឌនៃកិច្ចព្រមព្រៀង ADI ផ្តល់សិទ្ធិដល់អតិថិជននូវអាជ្ញាប័ណ្ណឥតគិតថ្លៃ មានកំណត់ ផ្ទាល់ខ្លួន បណ្តោះអាសន្ន មិនមែនផ្តាច់មុខ មិនអាចទទួលបន្ត និងមិនអាចផ្ទេរបានទៅ ប្រើក្រុមប្រឹក្សាវាយតម្លៃសម្រាប់គោលបំណងវាយតម្លៃតែប៉ុណ្ណោះ។ អតិថិជនយល់ និងយល់ព្រមថាក្រុមប្រឹក្សាវាយតម្លៃត្រូវបានផ្តល់ជូនសម្រាប់គោលបំណងតែមួយគត់ និងផ្តាច់មុខដែលបានយោងខាងលើ ហើយយល់ព្រមមិនប្រើប្រាស់ក្រុមប្រឹក្សាវាយតម្លៃសម្រាប់គោលបំណងផ្សេងទៀតណាមួយឡើយ។ លើសពីនេះ អាជ្ញាបណ្ណដែលត្រូវបានផ្តល់គឺត្រូវធ្វើឡើងយ៉ាងច្បាស់លាស់ចំពោះការកំណត់បន្ថែមដូចខាងក្រោម៖ អតិថិជនមិនត្រូវ (i) ជួល ជួល បង្ហាញ លក់ ផ្ទេរ ប្រគល់ អាជ្ញាប័ណ្ណរង ឬចែកចាយក្រុមប្រឹក្សាវាយតម្លៃ។ និង (ii) អនុញ្ញាតឱ្យភាគីទីបីណាមួយចូលទៅកាន់ក្រុមប្រឹក្សាវាយតម្លៃ។ ដូចដែលបានប្រើនៅទីនេះ ពាក្យ "ភាគីទីបី" រួមបញ្ចូលអង្គភាពណាមួយក្រៅពី ADI អតិថិជន បុគ្គលិករបស់ពួកគេ សាខា និងទីប្រឹក្សាក្នុងផ្ទះ។ ក្រុមប្រឹក្សាវាយតម្លៃមិនត្រូវបានលក់ទៅឱ្យអតិថិជនទេ។ សិទ្ធិទាំងអស់ដែលមិនត្រូវបានផ្តល់ឱ្យយ៉ាងច្បាស់លាស់នៅទីនេះ រួមទាំងភាពជាម្ចាស់នៃក្រុមប្រឹក្សាវាយតម្លៃត្រូវបានរក្សាដោយ ADI ។ ភាពសម្ងាត់។ កិច្ចព្រមព្រៀងនេះ និងក្រុមប្រឹក្សាវាយតម្លៃទាំងអស់ត្រូវចាត់ទុកថាជាព័ត៌មានសម្ងាត់ និងជាកម្មសិទ្ធិរបស់ ADI ។ អតិថិជនមិនអាចបង្ហាញ ឬផ្ទេរផ្នែកណាមួយនៃក្រុមប្រឹក្សាវាយតម្លៃទៅភាគីផ្សេងទៀតដោយហេតុផលណាមួយឡើយ។ នៅពេលឈប់ប្រើប្រាស់ក្រុមប្រឹក្សាវាយតម្លៃ ឬការបញ្ចប់កិច្ចព្រមព្រៀងនេះ អតិថិជនយល់ព្រមប្រគល់ក្រុមប្រឹក្សាវាយតម្លៃទៅ ADI ភ្លាមៗ។ ការរឹតបន្តឹងបន្ថែម។ អតិថិជនអាចមិនរុះរើ បំបែក ឬបញ្ច្រាសបន្ទះឈីបវិស្វករនៅលើក្រុមប្រឹក្សាវាយតម្លៃឡើយ។ អតិថិជនត្រូវជូនដំណឹងដល់ ADI អំពីការខូចខាតដែលបានកើតឡើង ឬការកែប្រែ ឬការផ្លាស់ប្តូរណាមួយដែលវាធ្វើទៅក្រុមប្រឹក្សាវាយតម្លៃ រួមទាំងប៉ុន្តែមិនកំណត់ចំពោះការលក់ ឬសកម្មភាពផ្សេងទៀតដែលប៉ះពាល់ដល់ខ្លឹមសារសម្ភារៈនៃក្រុមប្រឹក្សាវាយតម្លៃនោះទេ។ ការកែប្រែក្រុមប្រឹក្សាវាយតម្លៃត្រូវតែអនុវត្តតាមច្បាប់ដែលអាចអនុវត្តបាន រួមទាំងប៉ុន្តែមិនកំណត់ចំពោះសេចក្តីណែនាំរបស់ RoHS នោះទេ។ ការបញ្ចប់ ADI អាចបញ្ចប់កិច្ចព្រមព្រៀងនេះនៅពេលណាក៏បាន នៅពេលផ្តល់ការជូនដំណឹងជាលាយលក្ខណ៍អក្សរដល់អតិថិជន។ អតិថិជនយល់ព្រមត្រឡប់ទៅ ADI ក្រុមប្រឹក្សាវាយតម្លៃនៅពេលនោះ។ ដែនកំណត់នៃការទទួលខុសត្រូវ។ ក្រុមប្រឹក្សាវាយតម្លៃដែលផ្តល់ជូននៅទីនេះគឺត្រូវបានផ្តល់ជូន "ដូចដែលមាន" ហើយ ADI មិនធ្វើការធានា ឬការតំណាងនៃប្រភេទណាមួយទាក់ទងនឹងវាទេ។ ADI បដិសេធយ៉ាងជាក់លាក់ចំពោះការតំណាង ការយល់ព្រម ការធានា ឬការធានា ការបង្ហាញ ឬដោយបង្កប់ន័យ ដែលទាក់ទងនឹងក្រុមប្រឹក្សាវាយតម្លៃ រួមទាំង ប៉ុន្តែមិនកំណត់ចំពោះ លក្ខខណ្ឌ លក្ខខណ្ឌដែលមិនទាន់កំណត់ សម្រាប់គោលបំណងពិសេស ឬការមិនរំលោភលើសិទ្ធិកម្មសិទ្ធិបញ្ញា។ ក្នុងករណីណាក៏ដោយ ADI និងអ្នកផ្តល់អាជ្ញាប័ណ្ណរបស់ខ្លួននឹងទទួលខុសត្រូវចំពោះការខូចខាតដោយចៃដន្យ ពិសេស ដោយផ្ទាល់ ឬដោយអចេតនាណាមួយដែលបណ្តាលមកពីការកាន់កាប់របស់អតិថិជន ឬការប្រើប្រាស់តារាងវាយតម្លៃ ផលចំណេញផ្នែកហិរញ្ញវត្ថុ។ ការចំណាយយឺតយ៉ាវ ថ្លៃពលកម្ម ឬការបាត់បង់សុច្ឆន្ទៈ។ ទំនួលខុសត្រូវសរុបរបស់ ADI ពីមូលហេតុ និងមូលហេតុទាំងអស់ត្រូវកំណត់ចំពោះចំនួនប្រាក់ 100.00 ដុល្លារអាមេរិក ($XNUMX)។ នាំចេញ។ អតិថិជនយល់ព្រមថាវានឹងមិននាំចេញដោយផ្ទាល់ ឬដោយប្រយោលពីក្រុមប្រឹក្សាវាយតម្លៃទៅប្រទេសមួយផ្សេងទៀតនោះទេ ហើយវានឹងអនុលោមតាមច្បាប់ និងបទប្បញ្ញត្តិរបស់សហព័ន្ធសហរដ្ឋអាមេរិកដែលអាចអនុវត្តបានទាំងអស់ទាក់ទងនឹងការនាំចេញ។ ច្បាប់គ្រប់គ្រង។ កិច្ចព្រមព្រៀងនេះនឹងត្រូវគ្រប់គ្រងដោយ និងបកស្រាយដោយអនុលោមតាមច្បាប់សំខាន់ៗនៃរដ្ឋម៉ាសាឈូសេត (មិនរាប់បញ្ចូលការប៉ះទង្គិចនៃច្បាប់)។ សកម្មភាពផ្លូវច្បាប់ណាមួយទាក់ទងនឹងកិច្ចព្រមព្រៀងនេះនឹងត្រូវបានស្តាប់នៅក្នុងរដ្ឋ ឬតុលាការសហព័ន្ធដែលមានយុត្តាធិការនៅក្នុង Suffolk County រដ្ឋ Massachusetts ហើយអតិថិជនត្រូវបញ្ជូនទៅកាន់យុត្តាធិការផ្ទាល់ខ្លួន និងទីកន្លែងនៃតុលាការបែបនេះ។
![]() ©2024 Analog Devices, Inc. រក្សាសិទ្ធិគ្រប់យ៉ាង។
©2024 Analog Devices, Inc. រក្សាសិទ្ធិគ្រប់យ៉ាង។
ពាណិជ្ជសញ្ញា និងពាណិជ្ជសញ្ញាដែលបានចុះបញ្ជី គឺជាកម្មសិទ្ធិរបស់ម្ចាស់រៀងៗខ្លួន។
One Analog Way, Wilmington, MA 01887-2356, USA
ឯកសារ/ធនធាន
 |
ឧបករណ៍អាណាឡូក ADMT4000 True Power On Multi Turn Position Sensor [pdf] ការណែនាំអ្នកប្រើប្រាស់ ADMT4000 True Power On Multi Turn Position Sensor, ADMT4000, True Power On Multi Turn Position Sensor, Power On Multi Turn Position Sensor, On Multi Turn Position Sensor, Multi Turn Position Sensor, ឧបករណ៍ចាប់ទីតាំង, Sensor |