![]() UM2275
UM2275
Jagoran mai amfani
Farawa tare da ɗakin karatu na gano faɗuwar MotionFD na ainihi a cikin fadada X-CUBE-MEMS1 don STM32Cube
Gabatarwa
MotionEC wani ɓangaren ɗakin karatu ne na tsakiya na software na X-CUBE-MEMS1 kuma yana aiki akan STM3z2. Yana ba da bayanai na ainihi game da daidaita na'urar da matsayin motsi dangane da bayanai daga na'ura.
Yana bayar da abubuwan da ke biyowa: daidaitawar na'ura (quaternions, Euler angles), jujjuyawar na'urar (aikin gyroscope na zahiri), vector na nauyi da haɓakar layin layi.
An yi nufin wannan ɗakin karatu don yin aiki tare da ST MEMS kawai.
An samar da algorithm ɗin a sigar ɗakin karatu na tsaye kuma an ƙirƙira don amfani da su akan STM32 microcontrollers dangane da ARM® Cortex®-M0+, ARM® Cortex®-M3, ARM® Cortex®-M33, ARM® Cortex®-M4 da ARM® Cortex®-M7 gine-gine.
An gina shi a saman fasahar software ta STM32Cube don sauƙaƙa ɗauka a cikin na'urorin STM32 daban-daban.
Software yana zuwa tare da sample aiwatarwa yana gudana akan allon fadada X-NUCLEO-IKS4A1 ko X-NUCLEO-IKS01A3 akan kwamitin ci gaba na NUCLO-F401RE, NUCLO-U575ZI-Q ko NUcleO-L152RE.
Acronyms da gajarta
Tebura 1. Jerin gajarta
| Acronym | Bayani |
| API | Aikace-aikacen shirye-shiryen dubawa |
| BSP | Kunshin goyan bayan allo |
| GUI | Ƙwararren mai amfani da hoto |
| HAL | Hardware abstraction Layer |
| IDE | Hadaddiyar yanayin ci gaba |
MotionFD middleware library a cikin X-CUBE-MEMS1 fadada software don STM32Cube
2.1 MotionFD ya ƙareview
Laburaren MotionFD yana faɗaɗa ayyukan software na X-CUBE-MEMS1.
Laburaren yana samun bayanai daga na'urar accelerometer da firikwensin matsa lamba kuma yana ba da bayanai game da faɗuwar mai amfani dangane da bayanai daga na'ura.
An tsara ɗakin karatu don ST MEMS kawai. Ayyuka da aiki yayin amfani da wasu na'urori masu auna firikwensin MEMS ba a tantance su ba kuma suna iya bambanta sosai da abin da aka bayyana a cikin takaddar.
SampAna aiwatar da aiwatarwa don allon fadada X-NUCLEO-IKS4A1 da X-NUCLEO-IKS01A3, wanda aka ɗora akan kwamitin ci gaba na NUCLO-F401RE, NUcleO-U575ZI-Q ko NUCLO-L152RE.
2.2 MotionFD ɗakin karatu
Ana iya samun bayanan fasaha da ke bayyana ayyuka da sigogin MotionFD APIs a cikin MotionFD_Package.chm da aka harhada HTML file dake cikin babban fayil ɗin Takardun Takardun.
2.2.1 Bayanin ɗakin karatu na MotionFD
Laburaren gano faɗuwar MotionFD yana sarrafa bayanan da aka samu daga na'urar accelerometer da firikwensin matsa lamba; yana da fasali:
- yiwuwar bambanta ko faɗuwar mai amfani ta faru ko a'a
- ganewa bisa kawai accelerometer da bayanan firikwensin matsa lamba
- accelerometer da ake buƙata da bayanan firikwensin matsa lamba sampMitar mita shine 25 Hz
- bukatun albarkatun:
- Cortex-M3: 3.6 kB na lamba da 3.2 kB na ƙwaƙwalwar ajiya
- Cortex-M33: 3.4 kB na lamba da 3.2 kB na ƙwaƙwalwar ajiya
- Cortex-M4: 3.4 kB na lamba da 3.2 kB na ƙwaƙwalwar ajiya
- Cortex-M7: 3.4 kB na lamba da 3.2 na ƙwaƙwalwar ajiya - Akwai don ARM Cortex-M3, ARM Cortex-M33, ARM Cortex-M4 da ARM Cortex-M7 gine-gine
2.2.2 MotionFD APIs
APIs ɗin ɗakin karatu na MotionFD sune:
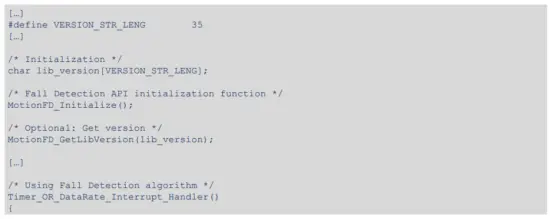
- uint8_t MotionFD_GetLibVersion(char * sigar)
– maido da laburare version
– *Sigar nuni ce zuwa tsararrun haruffa 35
– Yana mayar da adadin haruffa a cikin sigar sigar - MotionFD_Initialize (rashin banza)
- yana aiwatar da ƙaddamar da ɗakin karatu na MotionFD da saitin tsarin ciki
Lura: Dole ne a kira wannan aikin kafin amfani da ɗakin karatu na gano faɗuwar faɗuwar rana kuma dole ne a kunna tsarin CRC a cikin microcontroller STM32 (a cikin agogon gefen RCC yana ba da damar yin rajista) dole ne a kunna.
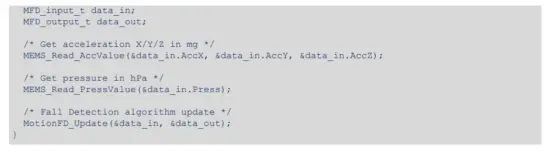
- babu komai MotionFD_Update (MFD_input_t *data_in, MFD_output_t *data_out)
- aiwatar da algorithm gano faɗuwa
– *Data_in siga shine mai nuni ga tsari tare da bayanan shigarwa
- sigogi na nau'in tsarin MFD_input_t sune:
◦ AccX shine ƙimar firikwensin accelerometer a cikin axis X a cikin MG
◦ AccY shine ƙimar firikwensin accelerometer a cikin Y axis a cikin MG
◦ AccZ shine ƙimar firikwensin accelerometer a axis Z a cikin MG
◦ Latsa shine ƙimar firikwensin matsa lamba a cikin hPa
- * ma'aunin bayanai_out shine mai nuni ga adadi mai abubuwa masu zuwa:
◦ MFD_NOFALL = 0
◦ MFD_FALL = 1 - motionFD_SetKnobs(float fall_threshold, int32_t fall_altitude_delta, iyo lying_time)
– saita sigogi sanyi na ɗakin karatu
– fall_threshold hanzari a cikin MG
- fall_altitude_delta bambancin tsayi a cm
- lokacin kwance a cikin daƙiƙa ba tare da motsi ba bayan tasiri - MotionFD_GetKnobs (mai iyo * fall_threshold, int32_t *fall_altitude_delta, iyo * lokacin_ƙarya)
– samun laburare sanyi sigogi
– fall_threshold hanzari a cikin MG
- fall_altitude_delta bambancin tsayi a cm
- lokacin kwance a cikin daƙiƙa ba tare da motsi ba bayan tasiri
2.2.3 API mai gudana

2.2.4 Lambar demo
Lambar nuni mai zuwa tana karanta bayanai daga na'urar accelerometer da firikwensin matsa lamba kuma yana samun lambar taron faɗuwa.
2.2.5 Ayyukan Algorithm
Algorithm na gano faɗuwa kawai yana amfani da bayanai daga accelerometer da firikwensin matsa lamba kuma yana aiki a ƙananan mitar (25 Hz) don rage yawan amfani da wutar lantarki.
2.3 Sampda aikace-aikace
MotionFD middleware za a iya sauƙin sarrafa shi don gina aikace-aikacen mai amfani; kamar yaddaampAna samar da aikace-aikacen a cikin babban fayil ɗin Aikace-aikacen.
An ƙera shi don yin aiki akan NUCLO-F401RE, NUCLO-U575ZI-Q ko NUCLO-L152RE ci gaban hukumar da aka haɗa zuwa X-NUCLEO-IKS4A1 ko X-NUCLEO-IKS01A3 allon fadada.
Aikace-aikacen yana gane faɗuwar mai amfani a cikin ainihin-lokaci.

Hoton da ke sama yana nuna maɓallin mai amfani B1 da LEDs uku na allon NUCLO-F401RE. Da zarar an kunna allon, LED LD3 (PWR) yana kunna.
Ana buƙatar haɗin kebul na USB don saka idanu bayanan ainihin lokacin. Kwamfutar tana aiki da PC ta hanyar haɗin USB. Wannan yanayin aiki yana ba da damar faɗuwar mai amfani da aka gano, accelerometer da bayanan firikwensin matsa lamba, lokaci stamp kuma daga ƙarshe sauran bayanan firikwensin, a cikin ainihin-lokaci, ta amfani da MEMS-Studio.
2.4 MEMS-Studio aikace-aikace
A sample aikace-aikacen yana amfani da aikace-aikacen MEMS-Studio, wanda za'a iya saukewa daga www.st.com.
Mataki na 1. Tabbatar cewa an shigar da direbobi masu dacewa kuma an haɗa allon STM32 Nucleo tare da allon faɗaɗa dacewa da PC.
Mataki na 2. Kaddamar da aikace-aikacen MEMS-Studio don buɗe babban taga aikace-aikacen.
Idan an haɗa allon STM32 Nucleo mai goyan bayan firmware zuwa PC, ana gano shi ta atomatik.
Danna maɓallin [Haɗa] don kafa haɗi zuwa allon ƙima.

Mataki na 3. Lokacin da aka haɗa zuwa allon STM32 Nucleo tare da goyan bayan firmware [Kimanin Laburaren] ana buɗewa.
Don farawa da dakatar da watsa bayanai, kunna abin da ya dace [Fara] ![]() ko [Dakata]
ko [Dakata] ![]() maballin akan mashin kayan aiki na waje na tsaye.
maballin akan mashin kayan aiki na waje na tsaye.
Bayanan da ke fitowa daga firikwensin da aka haɗa zai iya zama viewed zaɓi shafin [Data Table] akan kayan aikin tsaye na ciki ba
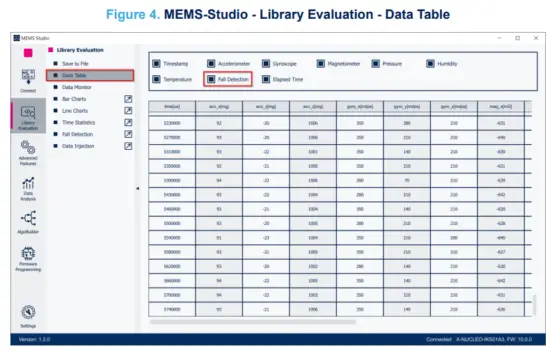
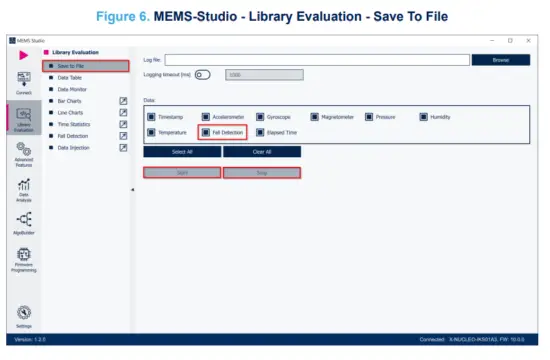
Mataki na 4. Danna kan [Fall Detection] don buɗe taga da aka sadaukar.

Mataki na 5. Danna kan [Ajiye Zuwa File] don buɗe taga daidaitawar bayanai. Zaɓi bayanan gano firikwensin da faɗuwar da za a adana a cikin file. Kuna iya farawa ko dakatar da adanawa ta danna maɓallin da ya dace.
Mataki na 6. Ana iya amfani da yanayin allurar bayanai don aika bayanan da aka samu a baya zuwa ɗakin karatu da karɓar sakamakon. Zaɓi shafin [Injection Data] akan mashin kayan aiki a tsaye don buɗe keɓaɓɓun view don wannan aikin.
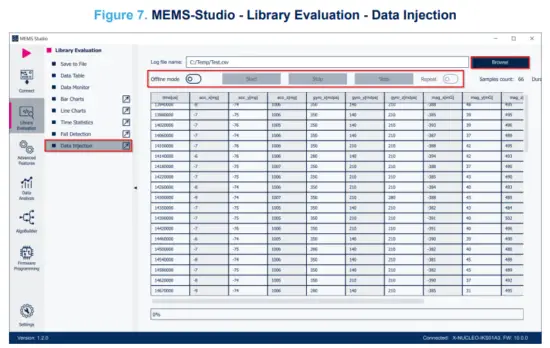
Mataki na 7. Danna maɓallin [Bincike] don zaɓar file tare da bayanan da aka kama a baya a cikin tsarin CSV.
Za a loda bayanan a cikin tebur a halin yanzu view.
Wasu maɓallan za su yi aiki. Kuna iya danna kan:
- Maɓallin [Yanayin kan layi] don kunna / kashe yanayin layi na firmware (yanayin amfani da bayanan da aka kama a baya).
- [Fara]/[Tsaya]/[Mataki]/[Maimaita] maɓallan don sarrafa ciyarwar bayanai daga MEMS-Studio zuwa ɗakin karatu.
2.5 Magana
Duk waɗannan albarkatu ana samun su kyauta akan www.st.com.
- UM1859: Farawa tare da X-CUBE-MEMS1 motsi MEMS da haɓaka software na firikwensin muhalli don STM32Cube
- UM1724: STM32 Nucleo-64 allon (MB1136)
- UM3233: Farawa tare da MEMS-Studio
Tarihin bita
Tebur 4. Tarihin bitar daftarin aiki
| Kwanan wata | Sigar | Canje-canje |
| 22-Satumba-2017 | 1 | Sakin farko. |
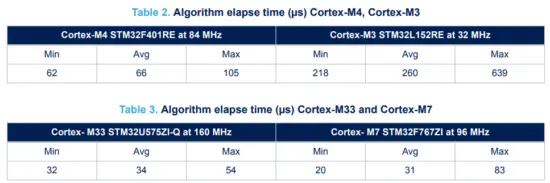
| 6-Fabrairu-18 | 2 | Ƙara nassoshi zuwa hukumar ci gaban NUCLO-L152RE da Tebur 2. Lokacin da ya wuce (μs) algorithm. |
| 21-Maris-18 | 3 | Sabunta Gabatarwa da Sashe na 2.1 MotionFD ya ƙareview. |
| 19-Fabrairu-19 | 4 | Shafin da aka sabunta 2. Lokacin da ya wuce (μs) algorithm da Hoto 2. STM32 Nucleo: LEDs, button, jumper. Ƙara bayanan dacewa da allo X-NUCLEO-IKS01A3. |
| 17-Satumba-24 | 5 | Gabatarwa Sashe na Ɗaukaka, Sashe na 2.1: MotionFD ya ƙareview, Sashe 2.2.1: Bayanin ɗakin karatu na MotionFD, Sashe na 2.2.2: MotionFD APIs, Sashe 2.2.5: Ayyukan Algorithm, Sashe na 2.3: Sample aikace-aikace, Sashe 2.4: MEMS-Studio aikace-aikace |
MUHIMMAN SANARWA – KU KARANTA A HANKALI
STMicroelectronics NV da rassan sa ("ST") sun tanadi haƙƙin yin canje-canje, gyare-gyare, haɓakawa, gyare-gyare, da haɓakawa ga samfuran ST da/ko ga wannan takaddar a kowane lokaci ba tare da sanarwa ba. Ya kamata masu siye su sami sabbin bayanai masu dacewa akan samfuran ST kafin yin oda. Ana siyar da samfuran ST bisa ga sharuɗɗa da sharuɗɗan siyarwa na ST a wurin lokacin amincewa.
Masu siye ke da alhakin zaɓi, zaɓi, da amfani da samfuran ST kuma ST ba ta ɗaukar alhakin taimakon aikace-aikacen ko ƙirar samfuran masu siye.
Babu lasisi, bayyananne ko fayyace, ga kowane haƙƙin mallakar fasaha da ST ke bayarwa a nan.
Sake siyar da samfuran ST tare da tanadi daban-daban da bayanan da aka gindaya a ciki zai ɓata kowane garantin da ST ya bayar don irin wannan samfurin.
ST da tambarin ST alamun kasuwanci ne na ST. Don ƙarin bayani game da alamun kasuwanci na ST, koma zuwa www.st.com/trademarks. Duk sauran samfuran ko sunayen sabis mallakin masu su ne.
Bayanin da ke cikin wannan takarda ya maye gurbin bayanan da aka kawo a baya a cikin kowane juzu'in wannan takaddar.
© 2024 STMicroelectronics – Duk haƙƙin mallaka
Takardu / Albarkatu
 |
ST X-CUBE-MEMS1 MotionFD Laburaren Gano Faɗuwar Lokaci na Gaskiya [pdf] Manual mai amfani X-CUBE-MEMS1 MotionFD Real Time Fall Detection Library, X-CUBE-MEMS1, MotionFD Real Time Fall Library Library, Real Time Fall Detection Library, Real Time Fall Detection Library. |



