![]() ماډل: D10 2D LiDAR
ماډل: D10 2D LiDAR
د کارونکي لارښود
چټک پیل
ډاډ ترلاسه کړئ چې د USB ډرایور نصب شوی او USB کیبل په کمپیوټر کې ولګوه،
وسیله د بریښنا رسولو سره وصل کړئ (+5V±10٪، 3A)،
زموږ د معلوماتو استملاک او تحلیل سافټویر چل کړئ،
بیا سم ارتباطي بندر غوره کړئ او د باډ نرخ 921600bps ته وټاکئ.
د پیل تڼۍ فشار ورکړئ "" او کار پیل کړئ!
(نسخه V8.01.8)
د نورو معلوماتو او ملاتړ لپاره، مهرباني وکړئ لیدنه وکړئ http://www.top1sensor.com
مشخصات
| توکي | پیرامیټونه |
| د سکین کولو لړۍ 1 | 0.15m-10m، 6m@10% |
| د اندازه کولو تېروتنه 2 | ±3CM@IOM@I0Hz |
| د زاویه اندازه سکین کول | 360° |
| زاویه حل | 0.28° |
| د سکین کولو فریکونسۍ 3 | 10Hz |
| د اندازه کولو فریکونسۍ | 14.28Khz |
| د تولید انٹرفیس | TTL |
| د واټن حل | 1 سانتي متره |
| د لیزر سرچینه | لیزر ډایډ 905nm، <1mW؛ د GB7247.1-2001 سره مطابقت لري د ټولګي 1 لیزر د سترګو خوندیتوب اړتیاوې |
| د بریښنا رسول | DC 5V±10%، د بریښنا مصرف < 3W د اوسني پیل> 1.5A |
| حجم | 78x78x56 mm |
| د عملیاتي حرارت درجه | - 10 درجې - + 50 درجې |
| د ذخیره کولو د حرارت درجه | - 20 درجې - + 70 درجې |
| د ساتنې کچه | IP54 |
| وزن | 190 ګرامه |
| کاري ژوند | د معیاري شرایطو لاندې 50,000 ساعته |
یادونه:
- یو څیز چې یوازې 10% انعکاس او تیاره رنګ لري چې 6m اندازه کیدی شي ، قدر سپین تر 10m پورې
- د اندازه کولو د تکرار کولو دقت ± 3cm دی کله چې د اندازه کولو حد 10m ته ورسیږي او د سکین کولو فریکونسۍ 10Hz وي.
- د ډیفالټ څرخولو سرعت په یوه ثانیه کې 10 انقلابونه دي
ابعادي نقاشي
2.1 وړاندې کول

2.2 ابعاد

نصب او پیوستون
3.1 نصب کول

3.2 پیوستون
3.2.1 د تارونو ډیاګرام

3.2.2 د 10pin پیوستون کیبل تعریفونه
| پن | فعالیت | رنګ | یادښتونه |
| 0 | +5V±10% | سور | د DC بریښنا رسولو + 5V |
| 1 | GND | سپین | د DC بریښنا ځمکه |
| 2 | Tx | ژیړ | د بهرني TTL Rx سره وصل شئ |
| 3 | Rx | شین | د بهرني TTL Tx سره وصل شئ |
| 4 | GND | تور | د داخلي GND سره وصل کړئ |
3.2.3 د بریښنا رسول
د بریښنا رسولو + 5V± 10٪. د پیل ټوکtage ته اړتیا ده چې 5V وي، د پیل اوسنی جریان 1500mA ته اړتیا لري، نورمال کاري جریان 500mA دی. که څه هم د بریښنا رسولو ریپل کوفیینټ باید له 40mV څخه ډیر نه وي. د فابریکې ترتیب دا دی چې D10 په اتوماتيک ډول د بریښنا له فعالیدو وروسته په حرکت پیل کوي.
د سافټویر ترتیب
4.1 د ډرایور نصب کول
وروسته له دې چې د USB ډرایور په بریالیتوب سره نصب شو، لیدر کمپیوټر ته وصل کړئ ترڅو دا تایید کړي چې دا د کام پورټ پیژني، او بیا بریښنا چالان کړئ. که چیرې بریښنا لومړی فعاله شي او بیا وصل شي ، نو احتمال شتون لري چې د کمپیوټر موږک به له کنټرول څخه بهر وي. مهرباني وکړئ د عملیاتو ترتیب ته پام وکړئ. د سافټویر exe چل کړئ fileاو دا په نورمال ډول کارول کیدی شي.
ځینې پی سی کولی شي په اتوماتيک ډول د LiDAR سره وصل کیدو وروسته ډرایور نصب کړي ، که نه ، مهرباني وکړئ زموږ د سافټویر کڅوړه کې د CP210X ډرایور ډاونلوډ کړئ.
4.2 د معلوماتو ترلاسه کول
د 'Favelas LiDAR Point Cloud Data Acquisition and Analysis System.exe' برنامه چلولو لپاره، د اړیکو ترتیباتو کړکۍ (شکل 1 وګورئ) به پاپ اپ شي. لومړی، وسیله D10 غوره کړئ. دوهم ، د وسیلې سره سم سیریل پورټ شمیره غوره کړئ ، د کمپیوټر سره وصل سیریل پورټ په اوتومات ډول د برنامې لخوا پیژندل کیدی شي. دریم، د باډ نرخ 921600 غوره کړئ. څلورم، د څارنې انٹرفیس ته د ننوتلو لپاره 'هو' کلیک وکړئ (شکل 2 وګورئ). د باډ نرخ: 921600 bps، د برابری بیټ: هیڅ نه، د ډاټا بیټ: 8، د سټاپ بیټ: 1

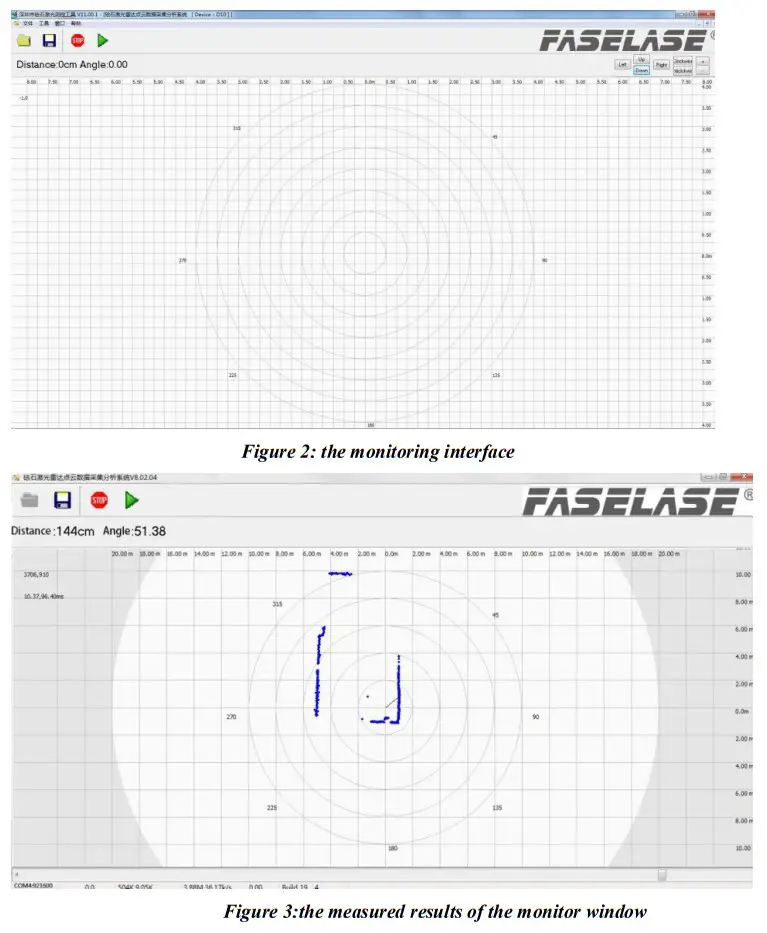
د خوندي کولو آیکون کلیک وکړئ![]() په اوسني دایره کې د کشف شوي نقطو شمیر او د هرې نقطې فاصله او زاویه ښودلو لپاره.
په اوسني دایره کې د کشف شوي نقطو شمیر او د هرې نقطې فاصله او زاویه ښودلو لپاره.
د مانیټر انٹرفیس کې د ښي موږک تڼۍ کلیک وکړئ ترڅو د هرې حلقې کشف ریښتیني وخت ډیټا بدلونونو مشاهده کولو لپاره 'یو ابعادي نندارتون' غوره کړئ.
د خوندي کولو آیکون کلیک وکړئ![]() د ازموینې ډاټا ثبتولو پیل کولو لپاره، نوم او لاره ټاکلو لپاره، په سمه توګه کلیک وکړئ، د ثبت پای ته رسولو لپاره، بیا د خوندي کولو تڼۍ کلیک وکړئ، د ډیټا ثبتولو بشپړولو لپاره په پاپ اپ کړکۍ کې منسوخ کړئ کلیک وکړئ.
د ازموینې ډاټا ثبتولو پیل کولو لپاره، نوم او لاره ټاکلو لپاره، په سمه توګه کلیک وکړئ، د ثبت پای ته رسولو لپاره، بیا د خوندي کولو تڼۍ کلیک وکړئ، د ډیټا ثبتولو بشپړولو لپاره په پاپ اپ کړکۍ کې منسوخ کړئ کلیک وکړئ.
ثبت شوي ډاټا د خلاص تاریخ په کلیک کولو سره هم خلاص کیدی شي File تڼۍ
د مخابراتو پروتوکول
5.1 د محصول ډاټا بڼه
5.1.1 بائنری محصول: 4 بایټونه، په شمول د واټن او زاویې ارزښتونه.
5.1.2 د هر فاصلې ازموینې ډیټا کڅوړه 4 بایټونه لري (په ترتیب کې د A, B, C, او D لیبل شوي.
هر بایټ ۸ بټونه لري، چې د A8,A7,…,A6,A1,B0,B7,…,B6,B1,C0,C7,…,C6,C1.او D0,D7,…,D10,D1 سره مطابقت لري.
5.1.3 د لومړي 3 بایټ MSBs 0 (A7, B7, C7) دي، او د وروستي بایټ MSB 1 (D7) دی، کوم چې د ډیټا پیک پای ته اشاره کوي. په هر ډیټا پیکټ کې 4*7 = 28 بټونه معتبر ډیټا شتون لري.
A6، A5، A4 د بایټ A د چک بټ دی. د ځانګړي الګوریتم لپاره، مهرباني وکړئ په راتلونکې برخه کې د ډاټا چک الګوریتم وګورئ.
A3, A2, A1, A0, B6, … B0, C6 د فاصلو ارزښتونه اندازه کیږي (په ټولیز ډول 12 بټونه)، د هغې رینج 0 ~ 4000cm دی.
C5…C0, D6,…D0 د زاویه اندازه شوي ارزښتونه دي (ټول 13 عددونه). د هغې حد 0 ~ 5759 دی، زاویه دقت 1/16 درجې دی.
| بټس | A7 | A6 | A5 | A4 | A3 | A2 | Al | AO |
| ارزښت | 0 | چک | چک | چک | واټن | واټن | واټن | واټن |
| بټس | B7 | B6 | B5 | B4 | B3 | B2 | ب ۳۲ | BO |
| ارزښت | 0 | واټن | واټن | واټن | واټن | واټن | واټن | واټن |
| بټس | C7 | C6 | C5 | C4 | C3 | C2 | سي 1 | CO |
| ارزښت | 0 | واټن | زاویه | زاویه | زاویه | زاویه | زاویه | زاویه |
| بټس | D7 | ډي ۱۵ | D5 | D4 | D3 | D2 | D1 | DO |
| ارزښت | 1 | زاویه | زاویه | زاویه | زاویه | زاویه | زاویه | زاویه |
د معلوماتو چک الګوریتم
هر کرکټر 8 بټونه لري (bit7 ~ bit0)، هر بټ کیدای شي 0 یا 1 وي. A6، A5، A4 د چک بټ د 3 B، C، D 1 بایټونو کم 3 بټ ذخیره کوي، کله چې الګوریتم وګورئ، لومړی د جدول په پورته کولو سره د B,C,D په 1 بایټس کې د '3' شمیره ترلاسه کړئ او بیا یې اضافه کړئ، او بیا د مجموعې 3 ټیټونه د A6,A5,A4 سره پرتله کړئ، که دوی مطابقت ولري، د اندازه کولو پایلې تولید کړئ غیر لاسلیک شوي چار GetCrcPackage4Byte (نه لاسلیک شوی چار * buf)
{. نه لاسلیک شوی چار B,C,D;
ب = بف[1]؛
ج = بف[2]؛
د = بف[3]؛
//چټ د 1 عدد جدول دی چې د 0-255 جامد غیر لاسلیک شوي چار مکعب سره مطابقت لري [256] = {
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
۲۴۷۷۷۷۴۹
};
بیرته راګرځیدنه (کیوبیټ } ټیټ 0 عددونه د B,C,D په 07 بایټس کې د 3 مجموعه راګرځوي
د معلوماتو تحلیل الګوریتم
// buf د ډیټا بسته پوائنټر دی، کوم چې 3 بایټونه د A، B، C په ترتیب سره ذخیره کوي.
// د فاصلې ارزښت بیرته راګرځول، که چیرې د معلوماتو چک سم نه وي، بیرته راستنیدنه -1
// د انټ ډیکوډ لیز ډیټا (نه لاسلیک شوی چار * بف)
{ انټ فاصله نه لاسلیک شوی چار کارډیټ = GetCrcPackage3Byte(buf);
// نه لاسلیک شوی چار orgcrc = (buf[0]>>4)&0x07;
که( cordate!= (buf[0]>>4))
بیرته راستنیدنه -1 ;
// فاصله محاسبه کړئ. A0,B6..B0,C6…C0
. فاصله = ((buf[0]&0x1)<<14)+(buf[1]&0x7F)<<7)+((buf[2]&0x7F))؛ د بیرته راستنیدو فاصله؛
}
//
// buf د ډیټا بسته پوائنټر دی، کوم چې د A، B، C او D په ترتیب کې 4 بایټ ذخیره کوي.
// د فاصلې ارزښت بیرته راستانه کړئ، که چیرې د معلوماتو چک سم نه وي، بیرته راګرځئ -1 typedef struct{ په فاصله کې؛
انټ زاویه
}FSDNode;
bool DecodeFSD10(FSDNode *nodelist,unsigned char *buf) { unsigned char cordate = GetCrcPackage4Byte(buf);// د B,C,D په 3 بایټس کې د ټیټ 1 عددونو مجموعه محاسبه کړئ
غیر لاسلیک شوی چار orgcrcdata = (buf[0]>>4)&0x07;// اصلي چک ترلاسه کړئ A6,A5,A4 که (orgcrcdata!= cordate) غلط راستون شي؛
نه لاسلیک شوی د فاصلې زاویه؛
// فاصله محاسبه کړئ
فاصله = (buf[0]&0x0F)؛
واټن <<= 7;
فاصله += (buf[1]&0x7F)؛
واټن <<= 1;
که( buf[2]&0x40)
واټن ++؛ ناول لیکونکی->فاصله = فاصله؛
// زاویه محاسبه کړئ
زاویه = buf[2]&0x3F;
زاویه <<= 7;
زاویه += (buf[3]&0x7F)؛
ناول لیکونکی->زاویه = زاویه؛
ریښتیا راستنیدل
موږ سره اړیکه ونیسئ ترڅو نور انجینري قضیې او د SDK کڅوړې ترلاسه کړئ چې د ROS ډرایورانو ملاتړ کوي.
د ډزو ستونزه
هغه فکتورونه چې د اندازه کولو لړۍ اغیزه کوي
D10 د نظری اندازه کولو وسیله ده چې د اندازه کولو پایلې یې د چاپیریال فکتورونو لخوا اغیزمن کیږي. له همدې امله د اندازه کولو اصلي پایله ممکن د عادي ارزښت سره توپیر ولري کوم چې په معیاري چاپیریال کې اندازه کیږي.
لاندې فکتورونه به د حقیقي اندازه کولو رینج اغیزه وکړي.
| عوامل | پایله اغیزه کوي |
| څو اړخیز انعکاس | د غلط اندازه کولو پایلې ممکن هغه وخت رامینځته شي کله چې د نورو شیانو څخه راستنیدونکي لیزر انرژي د هدف څخه بیرته راستنیدونکي انرژي څخه ډیر وي. |
| شفافه سطحه | د اندازه کولو غلطې پایلې ممکن واقع شي کله چې د اندازه کولو هدف بې رنګ مایعات یا شیشې وي |
| کوچنی څیز | کله چې اندازه شوی څیز د لیزر ځای څخه کوچنی وي ، یا لیزر د اندازه شوي څیز کونج اندازه کوي ، د اندازه کولو غلطې پایلې ممکن واقع شي. |
معیاري او اختیاري لوازم
| نه. | توکي | مقدار | څرګندونې |
| 1 | DI 0 | 1 پی سی | |
| 2 | د معلوماتو کیبل | 1 پی سی | |
| 3 | TTL ته USB کنورټر | 1 پی سی | |
| 4 | DC +5V بریښنا اډاپټر | 1 پی سی | اختیاري |
موږ سره اړیکه ونیسئ
د Xi'an Hizon نړیوالې سوداګرۍ Co.,Ltd
http://www.top1sensor.com
ټیلیفون: +86-29-87858956
فکس: +86-29-87858956
موبي: +86-13201520716 ښاغلی یانګ
برېښناليک: contact@top1sensor.com
اضافه کړئ: No.68 منځنی سکتور سویل، Haunching سړک، Xi'an، چین
اسناد / سرچینې
 |
FASELASE D10 2D LiDAR سینسر [pdf] د کارونکي لارښود D10، D10 د مچۍ سترګې 360 درجې سینسر نیویګیشن، د 360 درجې سینسر نیویګیشن، D10 2D LiDAR سینسر، D10، 2D LiDAR سینسر، LiDAR سینسر، سینسر |