![]() ម៉ូដែល: D10 2D LiDAR
ម៉ូដែល: D10 2D LiDAR
សៀវភៅណែនាំអ្នកប្រើប្រាស់
ចាប់ផ្តើមរហ័ស
ត្រូវប្រាកដថាបានដំឡើងកម្មវិធីបញ្ជា USB ហើយដោតខ្សែ USB ទៅក្នុងកុំព្យូទ័រ។
ភ្ជាប់ឧបករណ៍ទៅនឹងការផ្គត់ផ្គង់ថាមពល (+5V ± 10%, 3A),
ដំណើរការកម្មវិធីទទួលទិន្នន័យ និងការវិភាគរបស់យើង
បន្ទាប់មកជ្រើសរើសច្រកទំនាក់ទំនងត្រឹមត្រូវ ហើយកំណត់អត្រា baud ទៅ 921600bps ។
ចុចប៊ូតុងចាប់ផ្តើម "" ហើយចាប់ផ្តើមដំណើរការ!
(កំណែ V8.01.8)
សម្រាប់ព័ត៌មានបន្ថែម និងការគាំទ្រ សូមចូលទៅកាន់ http://www.top1sensor.com
លក្ខណៈបច្ចេកទេស
| ធាតុ | ប៉ារ៉ាម៉ែត្រ |
| ជួរស្កេន 1 | 0.15m-10m, 6m@10% |
| កំហុសក្នុងការវាស់វែង 2 | ±3CM@IOM@I0Hz |
| ជួរមុំស្កែន | 360° |
| ដំណោះស្រាយមុំ | 0.28° |
| ប្រេកង់ស្កេន 3 | 10 ហឺត |
| ប្រេកង់វាស់ | 14.28Khz |
| ចំណុចប្រទាក់លទ្ធផល | TTL |
| ដំណោះស្រាយចម្ងាយ | 1 សង់ទីម៉ែត្រ |
| ប្រភពឡាស៊ែរ | ឡាស៊ែរ diode 905nm, <1mW; អនុលោមតាម GB7247.1-2001 ថ្នាក់ទី១ តម្រូវការសុវត្ថិភាពភ្នែកឡាស៊ែរ |
| ការផ្គត់ផ្គង់ថាមពល | DC 5V ± 10%, ការប្រើប្រាស់ថាមពល < 3W ចរន្តចាប់ផ្តើម> 1.5A |
| កម្រិតសំឡេង | 78x78x56 ម។ |
| ជួរសីតុណ្ហភាពប្រតិបត្តិការ | -10°C-+50°C |
| ជួរសីតុណ្ហភាពផ្ទុក | -20°C-+70°C |
| កម្រិតការពារ | IP54 |
| ទម្ងន់ | ៣៨៥ ក្រាម។ |
| ជីវិតការងារ | 50,000 ម៉ោងក្រោមលក្ខខណ្ឌស្តង់ដារ |
កំណត់ចំណាំ៖
- វត្ថុដែលមានពន្លឺឆ្លុះបញ្ចាំងត្រឹមតែ 10% និងពណ៌ងងឹតដែលអាចវាស់បាន 6m, Kadar ពណ៌សរហូតដល់ 10m
- ភាពត្រឹមត្រូវនៃការវាស់វែងឡើងវិញគឺ ± 3cm នៅពេលដែលជួររង្វាស់សម្រេចបាន 10m និងប្រេកង់ស្កេនគឺ 10Hz ។
- ល្បឿនបង្វិលលំនាំដើមគឺ 10 បដិវត្តន៍ក្នុងមួយវិនាទី
គំនូរវិមាត្រ
2.1 ការបង្ហាញ

2.2 វិមាត្រ

ការដំឡើងនិងការតភ្ជាប់
3.1 ការដំឡើង

3.2 ការតភ្ជាប់
3.2.1 ដ្យាក្រាមខ្សែ

3.2.2 និយមន័យនៃខ្សែតភ្ជាប់ 10pin
| ម្ជុល | មុខងារ | ពណ៌ | កំណត់ចំណាំ |
| 0 | +5V ± 10% | ក្រហម | ការផ្គត់ផ្គង់ថាមពល DC + 5V |
| 1 | GND | ស | ដីថាមពល DC |
| 2 | Tx | លឿង | ភ្ជាប់ទៅខាងក្រៅ TTL Rx |
| 3 | Rx | បៃតង | ភ្ជាប់ទៅ TTL Tx ខាងក្រៅ |
| 4 | GND | ខ្មៅ | ភ្ជាប់ទៅ GND ខាងក្នុង |
3.2.3 ការផ្គត់ផ្គង់ថាមពល
ការផ្គត់ផ្គង់ថាមពល +5V ± 10% ។ វ៉ុលចាប់ផ្តើមtage ត្រូវតែមាន 5V ចរន្តចាប់ផ្តើមត្រូវការ 1500mA ចរន្តធ្វើការធម្មតាគឺ 500mA ។ ទោះយ៉ាងណាក៏ដោយ មេគុណរំញ័រនៃការផ្គត់ផ្គង់ថាមពលមិនគួរធំជាង 40mV។ ការកំណត់របស់រោងចក្រគឺថា D10 ចាប់ផ្តើមបង្វិលដោយស្វ័យប្រវត្តិបន្ទាប់ពីការបើកថាមពល។
ការកំណត់កម្មវិធី
4.1 ការដំឡើងកម្មវិធីបញ្ជា
បន្ទាប់ពីកម្មវិធីបញ្ជា USB ត្រូវបានដំឡើងដោយជោគជ័យ សូមភ្ជាប់ Lidar ទៅកុំព្យូទ័រ ដើម្បីបញ្ជាក់ថាវាស្គាល់ច្រក com ហើយបន្ទាប់មកបើកថាមពល។ ប្រសិនបើថាមពលត្រូវបានបើកជាមុនហើយបន្ទាប់មកបានភ្ជាប់ វាអាចទៅរួចដែលថាកណ្តុរកុំព្យូទ័រនឹងអស់ការគ្រប់គ្រង។ សូមយកចិត្តទុកដាក់លើលំដាប់ប្រតិបត្តិការ។ ដំណើរការ "កម្មវិធី exe fileហើយវាអាចប្រើបានជាធម្មតា។
កុំព្យូទ័រមួយចំនួនអាចដំឡើងកម្មវិធីបញ្ជាដោយស្វ័យប្រវត្តិបន្ទាប់ពីភ្ជាប់ LiDAR ប្រសិនបើមិនមានទេ សូមទាញយកកម្មវិធីបញ្ជា CP210X នៅក្នុងកញ្ចប់កម្មវិធីរបស់យើង។
4.2 ការទទួលបានទិន្នន័យ
ដើម្បីដំណើរការកម្មវិធី 'Favelas LiDAR Point Cloud Data Acquisition and Analysis System.exe' បង្អួចការកំណត់ទំនាក់ទំនង (សូមមើលរូបភាពទី 1) នឹងលេចឡើង។ ដំបូងជ្រើសរើសឧបករណ៍ D10 ។ ទីពីរ ជ្រើសរើសលេខច្រកសៀរៀលដែលត្រូវនឹងឧបករណ៍ ច្រកសៀរៀលដែលភ្ជាប់នឹងកុំព្យូទ័រអាចត្រូវបានកំណត់អត្តសញ្ញាណដោយកម្មវិធីដោយស្វ័យប្រវត្តិ។ ទីបី ជ្រើសរើសអត្រា baud 921600។ ទីបួន ចុច 'បាទ' ដើម្បីបញ្ចូលចំណុចប្រទាក់ត្រួតពិនិត្យ (មើលរូបភាពទី 2)។ អត្រា Baud: 921600 bps, Parity bit: គ្មាន, ទិន្នន័យ bits: 8, Stop bit: 1

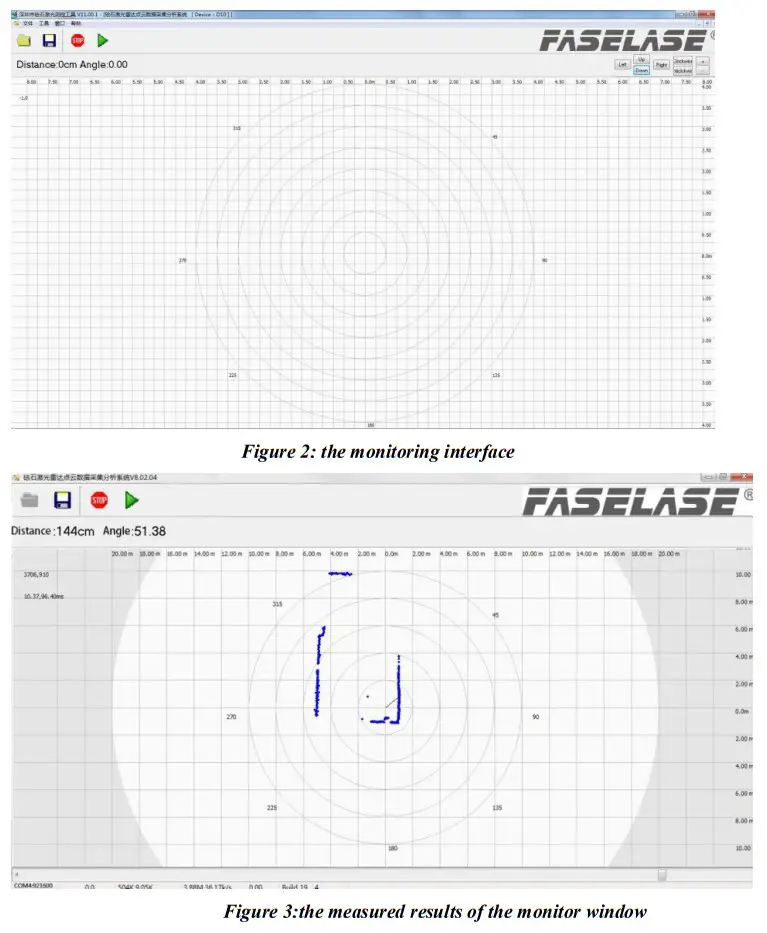
ចុចលើរូបតំណាងរក្សាទុក![]() ដើម្បីបង្ហាញចំនួនចំណុចដែលបានរកឃើញក្នុងរង្វង់បច្ចុប្បន្ន និងចម្ងាយ និងមុំនៃចំណុចនីមួយៗ។
ដើម្បីបង្ហាញចំនួនចំណុចដែលបានរកឃើញក្នុងរង្វង់បច្ចុប្បន្ន និងចម្ងាយ និងមុំនៃចំណុចនីមួយៗ។
ចុចប៊ូតុងកណ្ដុរខាងស្ដាំនៅក្នុងចំណុចប្រទាក់ម៉ូនីទ័រដើម្បីជ្រើសរើស 'ការបង្ហាញវិមាត្រមួយ' ដើម្បីសង្កេតមើលការផ្លាស់ប្តូរទិន្នន័យក្នុងពេលជាក់ស្តែងនៃការរកឃើញរង្វង់នីមួយៗ។
ចុចលើរូបតំណាងរក្សាទុក![]() ដើម្បីចាប់ផ្តើមកត់ត្រាទិន្នន័យសាកល្បង ដើម្បីកំណត់ឈ្មោះ និងផ្លូវ សូមចុច យល់ព្រម ដើម្បីបញ្ចប់ការថត ចុចប៊ូតុង រក្សាទុកម្តងទៀត ចុច បោះបង់ ក្នុងបង្អួចដែលលេចឡើង ដើម្បីបញ្ចប់ការកត់ត្រាទិន្នន័យ។
ដើម្បីចាប់ផ្តើមកត់ត្រាទិន្នន័យសាកល្បង ដើម្បីកំណត់ឈ្មោះ និងផ្លូវ សូមចុច យល់ព្រម ដើម្បីបញ្ចប់ការថត ចុចប៊ូតុង រក្សាទុកម្តងទៀត ចុច បោះបង់ ក្នុងបង្អួចដែលលេចឡើង ដើម្បីបញ្ចប់ការកត់ត្រាទិន្នន័យ។
ទិន្នន័យដែលបានកត់ត្រាក៏អាចត្រូវបានបើកដោយចុច បើកប្រវត្តិ File ប៊ូតុង
ពិធីការទំនាក់ទំនង
5.1 ទ្រង់ទ្រាយទិន្នន័យលទ្ធផល
5.1.1 ទិន្នផលគោលពីរ៖ 4 បៃ រួមទាំងតម្លៃចម្ងាយ និងមុំ។
5.1.2 កញ្ចប់ទិន្នន័យតេស្តចម្ងាយនីមួយៗមាន 4 បៃ (ដាក់ស្លាក A, B, C, និង D តាមលំដាប់លំដោយ។,
បៃនីមួយៗមាន 8 ប៊ីត ដែលត្រូវនឹង A7, A6,…,A1,A0, B7,B6,…,B1,B0, C7,C6,…,C1,C0.and D7,D10,…,D1,D0។
5.1.3 MSBs នៃ 3 បៃដំបូងគឺ 0 (A7, B7, C7) ហើយ MSB នៃបៃចុងក្រោយគឺ 1 (D7) ដែលបង្ហាញពីការបញ្ចប់នៃកញ្ចប់ទិន្នន័យ។ មានទិន្នន័យត្រឹមត្រូវ 4 * 7 = 28 ប៊ីតនៅក្នុងកញ្ចប់ទិន្នន័យនីមួយៗ។
A6, A5, A4 នៃបៃ A គឺជាប៊ីតធីក។ សម្រាប់ក្បួនដោះស្រាយជាក់លាក់ សូមពិនិត្យមើលក្បួនដោះស្រាយពិនិត្យទិន្នន័យនៅផ្នែកបន្ទាប់។
A3, A2, A1, A0, B6, … B0, C6 គឺជាតម្លៃចម្ងាយដែលបានវាស់ (សរុប 12 ប៊ីត) ជួររបស់វាគឺ 0 ~ 4000cm ។
C5…C0, D6,…D0 គឺជាតម្លៃមុំវាស់ (សរុបចំនួន 13 ខ្ទង់)។ ជួររបស់វាគឺ 0 ~ 5759 ភាពត្រឹមត្រូវមុំគឺ 1/16 ដឺក្រេ។
| ប៊ីត | A7 | A6 | A5 | A4 | A3 | A2 | Al | AO |
| តម្លៃ | 0 | ពិនិត្យ | ពិនិត្យ | ពិនិត្យ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ |
| ប៊ីត | B7 | B6 | B5 | B4 | B3 | B2 | ខ ១៦ | BO |
| តម្លៃ | 0 | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ | ចម្ងាយ |
| ប៊ីត | C7 | C6 | C5 | C4 | C3 | C2 | គ ១៤ | CO |
| តម្លៃ | 0 | ចម្ងាយ | មុំ | មុំ | មុំ | មុំ | មុំ | មុំ |
| ប៊ីត | D7 | ឃ ២៣២ | D5 | D4 | D3 | D2 | D1 | DO |
| តម្លៃ | 1 | មុំ | មុំ | មុំ | មុំ | មុំ | មុំ | មុំ |
ក្បួនដោះស្រាយត្រួតពិនិត្យទិន្នន័យ
តួអក្សរនីមួយៗមាន 8 ប៊ីត (bit7~bit0) ប៊ីតនីមួយៗអាចជា 0 ឬ 1។ ប៊ីតធីក A6,A5,A4 រក្សាទុក 3 ប៊ីតទាបនៃផលបូកនៃ 1 នៃ B,C,D 3 បៃ នៅពេលពិនិត្យមើលក្បួនដោះស្រាយដំបូង ទទួលបានចំនួន '1' ក្នុង 3 បៃនៃ B, C, D ដោយរកមើលតារាង ហើយបន្ទាប់មកបន្ថែមពួកវាឡើង ហើយបន្ទាប់មកប្រៀបធៀប 3 ប៊ីតទាបនៃផលបូកជាមួយ A6, A5, A4 ប្រសិនបើពួកវាស្របគ្នា។ បញ្ចេញលទ្ធផលរង្វាស់ដែលមិនបានចុះហត្ថលេខា char GetCrcPackage4Byte (unsigned char *buf)
{. តួអក្សរដែលមិនបានចុះហត្ថលេខា B, C, D;
B = buf[1];
C = buf[2];
D = buf[3];
//chit គឺជាតារាងលេខ 1 ដែលត្រូវគ្នានឹង 0-255 static unsigned char cubit[256] = {
0,1,1,2,1,2,2,3,1,2,2,3,2,3,3,4,1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,4,5,5,6,5,6,6,7,5,6,6,7,6,7,7,8,
};
ត្រឡប់ (cubit[B]+cubit[C]+chit[D])&0x07; } ត្រឡប់លេខ 3 ខ្ទង់ទាប ផលបូកនៃ 1 ក្នុង 3 បៃនៃ B,C,.D
ក្បួនដោះស្រាយការវិភាគទិន្នន័យ
//buf គឺជាទ្រនិចកញ្ចប់ទិន្នន័យ ដែលរក្សាទុក 3 បៃជា A, B, C តាមលំដាប់លំដោយ។
// ត្រឡប់តម្លៃចម្ងាយ ប្រសិនបើការត្រួតពិនិត្យទិន្នន័យមិនត្រឹមត្រូវ ត្រឡប់ -1
// Int Decode Lase Data (unsigned char *buf)
{ ចម្ងាយ int; unsigned char cordate = GetCrcPackage3Byte(buf);
//unsigned char orgcrc = (buf[0]>>4)&0x07;
if(cordate!= (buf[0]>>4))
ត្រឡប់ -1; ;
// គណនាចម្ងាយ។ A0,B6..B0,C6…C0
. ចម្ងាយ = ((buf[0]&0x1)<<14)+(buf[1]&0x7F)<<7)+((buf[2]&0x7F)); ចម្ងាយត្រឡប់មកវិញ;
}
//
//buf គឺជាទ្រនិចកញ្ចប់ទិន្នន័យ ដែលរក្សាទុក 4 បៃជា A, B, C និង D តាមលំដាប់លំដោយ។
// ត្រឡប់តម្លៃចម្ងាយ ប្រសិនបើការត្រួតពិនិត្យទិន្នន័យមិនត្រឹមត្រូវ ត្រឡប់ -1 typedef struct{ into distance;
មុំ int;
}FSDNode;
bool DecodeFSD10(FSDNode *nodelist, unsigned char *buf) { unsigned char cordate = GetCrcPackage4Byte(buf);// គណនាលេខ 3 ខ្ទង់ទាប ផលបូកនៃ 1 ក្នុង 3 បៃនៃ B,C,.D
unsigned char orgcrcdata = (buf[0]>>4)&0x07;//get original check A6,A5,A4 if(orgcrcdata!= cordate) ត្រឡប់មិនពិត;
មុំចម្ងាយ Int ដែលមិនបានចុះហត្ថលេខា;
// គណនាចម្ងាយ
ចម្ងាយ = (buf[0]&0x0F);
ចម្ងាយ <<= 7;
ចម្ងាយ += (buf[1]&0x7F);
ចម្ងាយ <<= 1;
ប្រសិនបើ(buf[2]&0x40)
ចម្ងាយ ++; ប្រលោមលោក->ចម្ងាយ = ចម្ងាយ;
// គណនាមុំ
មុំ = buf[2]&0x3F;
មុំ <<= 7;
មុំ += (buf[3]&0x7F);
ប្រលោមលោក->មុំ = មុំ;
ត្រឡប់ពិត;
ទាក់ទងមកយើងដើម្បីទទួលបានករណីវិស្វកម្មបន្ថែម និងកញ្ចប់ SDK ដែលគាំទ្រកម្មវិធីបញ្ជា ROS ។
ការបាញ់បញ្ហា
កត្តាដែលប៉ះពាល់ដល់ជួររង្វាស់
D10 គឺជាឧបករណ៍វាស់អុបទិកដែលលទ្ធផលនៃការវាស់វែងត្រូវបានប៉ះពាល់ដោយកត្តាបរិស្ថាន។ ដូច្នេះលទ្ធផលវាស់វែងជាក់ស្តែងអាចខុសគ្នាជាមួយនឹងតម្លៃធម្មតាដែលត្រូវបានវាស់នៅក្នុងបរិយាកាសស្តង់ដារ។
កត្តាខាងក្រោមនឹងមានឥទ្ធិពលលើជួររង្វាស់ជាក់ស្តែង។
| កត្តា | ប៉ះពាល់ដល់លទ្ធផល |
| ការឆ្លុះបញ្ចាំងពហុផ្លូវ | លទ្ធផលនៃការវាស់វែងខុសអាចកើតឡើងនៅពេលដែលថាមពលឡាស៊ែរត្រឡប់ពីវត្ថុផ្សេងទៀតលើសពីថាមពលដែលត្រឡប់ពីគោលដៅ |
| ផ្ទៃថ្លា | លទ្ធផលរង្វាស់ខុសអាចកើតឡើងនៅពេលដែលគោលដៅវាស់វែងគឺជាវត្ថុរាវ ឬកែវដែលគ្មានពណ៌ |
| វត្ថុតូច | នៅពេលដែលវត្ថុដែលបានវាស់មានទំហំតូចជាងកន្លែងឡាស៊ែរ ឬឡាស៊ែរវាស់ជ្រុងនៃវត្ថុដែលបានវាស់វែងនោះ លទ្ធផលរង្វាស់មិនត្រឹមត្រូវអាចកើតឡើង។ |
គ្រឿងបន្លាស់ស្តង់ដារ និងជម្រើស
| ទេ | ធាតុ | ចំនួន | សុន្ទរកថា |
| 1 | ឌី ០ | 1 ភី | |
| 2 | ខ្សែទិន្នន័យ | 1 ភី | |
| 3 | ឧបករណ៍បំលែង TTL ទៅ USB | 1 ភី | |
| 4 | អាដាប់ទ័រថាមពល DC + 5V | 1 ភី | ស្រេចចិត្ត |
ទាក់ទងមកយើងខ្ញុំ
Xi'an Hizon International Trade Co., Ltd
http://www.top1sensor.com
ទូរស័ព្ទ៖ +86-29-87858956
ទូរសារ៖ +86-29-87858956
Moby: +86-13201520716 លោក Yang
អ៊ីមែល៖ contact@top1sensor.com
បន្ថែម៖ No.68 Middle Sector South, Haunching Road, Xi'an, China
ឯកសារ/ធនធាន
 |
ឧបករណ៍ចាប់សញ្ញា FASELASE D10 2D LiDAR [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ D10, D10 Bee eyes navigation sensor 360 degree, 360 degree sensor navigation, D10 2D LiDAR Sensor, D10, 2D LiDAR Sensor, LiDAR Sensor, Sensor |