![]() പ്രവർത്തന നിർദ്ദേശങ്ങൾ
പ്രവർത്തന നിർദ്ദേശങ്ങൾ
ഇലക്റ്റർ ആർഡ്വിനോ
നാനോ
പരിശീലന ബോർഡ് MCCAB®
റവ. 3.3
പ്രിയ ഉപഭോക്താവേ, ബാധകമായ യൂറോപ്യൻ നിർദ്ദേശങ്ങൾക്കനുസൃതമായാണ് MCCAB ട്രെയിനിംഗ് ബോർഡ് നിർമ്മിച്ചിരിക്കുന്നത്, അതിനാൽ CE അടയാളം വഹിക്കുന്നു. ഇതിൻ്റെ ഉദ്ദേശിച്ച ഉപയോഗം ഈ പ്രവർത്തന നിർദ്ദേശങ്ങളിൽ വിവരിച്ചിരിക്കുന്നു. നിങ്ങൾ MCCAB ട്രെയിനിംഗ് ബോർഡ് പരിഷ്കരിക്കുകയോ അതിൻ്റെ ഉദ്ദേശ്യത്തിന് അനുസൃതമായി അത് ഉപയോഗിക്കാതിരിക്കുകയോ ചെയ്താൽ, ബാധകമായ നിയമങ്ങൾ പാലിക്കുന്നതിന് നിങ്ങൾ മാത്രമാണ് ഉത്തരവാദി.
അതിനാൽ, ഈ പ്രവർത്തന നിർദ്ദേശങ്ങളിൽ വിവരിച്ചിരിക്കുന്നതുപോലെ MCCAB പരിശീലന ബോർഡും അതിലെ എല്ലാ ഘടകങ്ങളും മാത്രം ഉപയോഗിക്കുക. ഈ പ്രവർത്തന മാനുവലിനൊപ്പം നിങ്ങൾക്ക് MCCAB ട്രെയിനിംഗ് ബോർഡിൽ മാത്രമേ കടന്നുപോകാൻ കഴിയൂ.
ഈ മാനുവലിലെ എല്ലാ വിവരങ്ങളും പതിപ്പ് ലെവൽ Rev. 3.3 ഉള്ള MCCAB ട്രെയിനിംഗ് ബോർഡിനെ പരാമർശിക്കുന്നു. പരിശീലന ബോർഡിൻ്റെ പതിപ്പ് തലം അതിൻ്റെ താഴത്തെ വശത്ത് അച്ചടിച്ചിരിക്കുന്നു (പേജ് 13 ലെ ചിത്രം 20 കാണുക). ഈ മാനുവലിൻ്റെ നിലവിലെ പതിപ്പ് ഡൗൺലോഡ് ചെയ്യാം webസൈറ്റ് www.elektor.com/20440 ഡൗൺലോഡിനായി. ARDUINO ഉം മറ്റ് Arduino ബ്രാൻഡ് നാമങ്ങളും ലോഗോകളും Arduino SA-യുടെ രജിസ്റ്റർ ചെയ്ത വ്യാപാരമുദ്രകളാണ്. ®
റീസൈക്ലിംഗ്
![]() ഉപയോഗിച്ച ഇലക്ട്രിക്കൽ, ഇലക്ട്രോണിക് ഉപകരണങ്ങൾ ഇലക്ട്രോണിക് മാലിന്യമായി പുനഃചംക്രമണം ചെയ്യണം, ഗാർഹിക മാലിന്യങ്ങളിൽ സംസ്കരിക്കരുത്.
ഉപയോഗിച്ച ഇലക്ട്രിക്കൽ, ഇലക്ട്രോണിക് ഉപകരണങ്ങൾ ഇലക്ട്രോണിക് മാലിന്യമായി പുനഃചംക്രമണം ചെയ്യണം, ഗാർഹിക മാലിന്യങ്ങളിൽ സംസ്കരിക്കരുത്.
MCCAB ട്രെയിനിംഗ് ബോർഡിൽ റീസൈക്കിൾ ചെയ്യാൻ കഴിയുന്ന വിലയേറിയ അസംസ്കൃത വസ്തുക്കൾ അടങ്ങിയിരിക്കുന്നു.
അതിനാൽ, ഉചിതമായ ശേഖരണ ഡിപ്പോയിൽ ഉപകരണം നീക്കം ചെയ്യുക. (EU നിർദ്ദേശം 2012/19 / EU). ഏറ്റവും അടുത്തുള്ള സൗജന്യ കളക്ഷൻ പോയിൻ്റ് എവിടെ കണ്ടെത്താമെന്ന് നിങ്ങളുടെ മുനിസിപ്പൽ ഭരണകൂടം നിങ്ങളോട് പറയും.
സുരക്ഷാ നിർദ്ദേശങ്ങൾ
MCCAB ട്രെയിനിംഗ് ബോർഡിനായുള്ള ഈ പ്രവർത്തന നിർദ്ദേശങ്ങളിൽ കമ്മീഷൻ ചെയ്യലും പ്രവർത്തനവും സംബന്ധിച്ച പ്രധാന വിവരങ്ങൾ അടങ്ങിയിരിക്കുന്നു!
അതിനാൽ, വൈദ്യുതാഘാതം, തീ അല്ലെങ്കിൽ പ്രവർത്തന പിശകുകൾ, പരിശീലന ബോർഡിന് കേടുപാടുകൾ എന്നിവ കാരണം ജീവനും കൈകാലുകൾക്കും പരിക്കേൽക്കാതിരിക്കാൻ പരിശീലന ബോർഡ് ആദ്യമായി ഉപയോഗിക്കുന്നതിന് മുമ്പ് മുഴുവൻ പ്രവർത്തന മാനുവലും ശ്രദ്ധാപൂർവ്വം വായിക്കുക.
പരിശീലന ബോർഡിൻ്റെ മറ്റെല്ലാ ഉപയോക്താക്കൾക്കും ഈ മാനുവൽ ലഭ്യമാക്കുക.
ഐഇസി 61010-031 സ്റ്റാൻഡേർഡ് അനുസരിച്ചാണ് ഉൽപ്പന്നം രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്, കൂടാതെ പരീക്ഷണം നടത്തി ഫാക്ടറി സുരക്ഷിതമായ അവസ്ഥയിൽ ഉപേക്ഷിച്ചു. ഇലക്ട്രിക്കൽ ഉപകരണങ്ങൾ കൈകാര്യം ചെയ്യുന്നതിന് ബാധകമായ നിയന്ത്രണങ്ങളും അതുപോലെ പൊതുവായി അംഗീകരിക്കപ്പെട്ട എല്ലാ സുരക്ഷാ നടപടികളും നടപടിക്രമങ്ങളും ഉപയോക്താവ് നിരീക്ഷിക്കണം. പ്രത്യേകിച്ചും, VDE നിയന്ത്രണങ്ങൾ VDE 0100 (ലോ-വോളിയത്തിൻ്റെ ആസൂത്രണം, ഇൻസ്റ്റാളേഷൻ, ടെസ്റ്റിംഗ്tage ഇലക്ട്രിക്കൽ സംവിധാനങ്ങൾ), VDE 0700 (ഗാർഹിക ഉപയോഗത്തിനുള്ള ഇലക്ട്രിക്കൽ ഉപകരണങ്ങളുടെ സുരക്ഷ), VDE 0868 (ഓഡിയോ/വീഡിയോ, ഇൻഫർമേഷൻ, കമ്മ്യൂണിക്കേഷൻ ടെക്നോളജി എന്നിവയ്ക്കുള്ള ഉപകരണങ്ങൾ) ഇവിടെ പരാമർശിക്കേണ്ടതാണ്.
വാണിജ്യ സൗകര്യങ്ങളിൽ, വാണിജ്യ തൊഴിലുടമകളുടെ ബാധ്യതാ ഇൻഷുറൻസ് അസോസിയേഷനുകളുടെ അപകട പ്രതിരോധ നിയന്ത്രണങ്ങളും ബാധകമാണ്.
സുരക്ഷാ ചിഹ്നങ്ങൾ ഉപയോഗിച്ചു
![]() വൈദ്യുത അപകട മുന്നറിയിപ്പ്
വൈദ്യുത അപകട മുന്നറിയിപ്പ്
ഈ അടയാളം മരണത്തിലേക്കോ വ്യക്തിപരമായ പരിക്കിലേക്കോ കാരണമായേക്കാവുന്ന അവസ്ഥകളെയോ സമ്പ്രദായങ്ങളെയോ സൂചിപ്പിക്കുന്നു.
![]() പൊതുവായ മുന്നറിയിപ്പ് അടയാളം
പൊതുവായ മുന്നറിയിപ്പ് അടയാളം
ഉൽപ്പന്നത്തിനോ ബന്ധിപ്പിച്ച ഉപകരണങ്ങൾക്കോ കേടുപാടുകൾ വരുത്തിയേക്കാവുന്ന വ്യവസ്ഥകളോ സമ്പ്രദായങ്ങളോ ഈ അടയാളം സൂചിപ്പിക്കുന്നു.
2.1 വൈദ്യുതി വിതരണം
![]() ജാഗ്രത:
ജാഗ്രത:
- ഒരു സാഹചര്യത്തിലും നെഗറ്റീവ് വോളിയം പാടില്ലtages അല്ലെങ്കിൽ voltag+5 V-ൽ കൂടുതലുള്ളവർ MCCAB ട്രെയിനിംഗ് ബോർഡുമായി ബന്ധിപ്പിക്കും. ഇൻപുട്ടുകൾ VX1, VX2 എന്നിവ മാത്രമാണ് ഒഴിവാക്കലുകൾ, ഇവിടെ ഇൻപുട്ട് വോള്യംtages +8 V മുതൽ +12 V വരെയുള്ള ശ്രേണിയിലായിരിക്കാം (വിഭാഗം 4.2 കാണുക).
- ഗ്രൗണ്ട് ലൈനിലേക്ക് (GND, 0 V) മറ്റേതെങ്കിലും വൈദ്യുത സാധ്യതകളെ ഒരിക്കലും ബന്ധിപ്പിക്കരുത്.
- ഗ്രൗണ്ട് (GND, 0 V), +5 V എന്നിവയ്ക്കുള്ള കണക്ഷനുകൾ ഒരിക്കലും പരസ്പരം മാറ്റരുത്, ഇത് MCCAB ട്രെയിനിംഗ് ബോർഡിന് സ്ഥിരമായ കേടുപാടുകൾക്ക് കാരണമാകും!
- പ്രത്യേകിച്ചും, ഒരിക്കലും ~230 V അല്ലെങ്കിൽ ~115 V മെയിൻ വോള്യം ബന്ധിപ്പിക്കരുത്tagഇ MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്ക്!
 ജീവന് അപകടമുണ്ട് !!!
ജീവന് അപകടമുണ്ട് !!!
2.2 കൈകാര്യം ചെയ്യലും പാരിസ്ഥിതിക സാഹചര്യങ്ങളും
മരണമോ പരിക്കോ ഒഴിവാക്കുന്നതിനും ഉപകരണത്തെ കേടുപാടുകളിൽ നിന്ന് സംരക്ഷിക്കുന്നതിനും, ഇനിപ്പറയുന്ന നിയമങ്ങൾ കർശനമായി പാലിക്കണം:
- സ്ഫോടനാത്മകമായ നീരാവിയോ വാതകങ്ങളോ ഉള്ള മുറികളിൽ MCCAB പരിശീലന ബോർഡ് ഒരിക്കലും പ്രവർത്തിപ്പിക്കരുത്.
- ഇലക്ട്രോണിക് സർക്യൂട്ടുകൾ കൈകാര്യം ചെയ്യാൻ പരിചയമില്ലാത്ത ചെറുപ്പക്കാരോ വ്യക്തികളോ MCCAB ട്രെയിനിംഗ് ബോർഡിൽ പ്രവർത്തിക്കുന്നുണ്ടെങ്കിൽ, ഉദാഹരണത്തിന്, പരിശീലനത്തിൻ്റെ പശ്ചാത്തലത്തിൽ, ഉത്തരവാദിത്തമുള്ള സ്ഥാനത്ത് ഉചിതമായ പരിശീലനം ലഭിച്ച ഉദ്യോഗസ്ഥർ ഈ പ്രവർത്തനങ്ങൾക്ക് മേൽനോട്ടം വഹിക്കണം.
14 വയസ്സിന് താഴെയുള്ള കുട്ടികളുടെ ഉപയോഗം ഉദ്ദേശിച്ചുള്ളതല്ല, അത് ഒഴിവാക്കേണ്ടതാണ്. - MCCAB ട്രെയിനിംഗ് ബോർഡ് കേടുപാടുകൾ കാണിക്കുന്നുണ്ടെങ്കിൽ (ഉദാ, മെക്കാനിക്കൽ അല്ലെങ്കിൽ ഇലക്ട്രിക്കൽ സമ്മർദ്ദം കാരണം), സുരക്ഷാ കാരണങ്ങളാൽ അത് ഉപയോഗിക്കരുത്.
- MCCAB പരിശീലന ബോർഡ് +40 °C വരെ താപനിലയിൽ വൃത്തിയുള്ളതും വരണ്ടതുമായ അന്തരീക്ഷത്തിൽ മാത്രമേ ഉപയോഗിക്കാവൂ.
2.3 നന്നാക്കലും പരിപാലനവും
- വസ്തുവകകൾക്കുണ്ടാകുന്ന കേടുപാടുകൾ അല്ലെങ്കിൽ വ്യക്തിപരമായ പരിക്കുകൾ ഒഴിവാക്കാൻ, ആവശ്യമായി വന്നേക്കാവുന്ന ഏതെങ്കിലും അറ്റകുറ്റപ്പണികൾ ഉചിതമായ പരിശീലനം ലഭിച്ച സ്പെഷ്യലിസ്റ്റ് ഉദ്യോഗസ്ഥർക്കും യഥാർത്ഥ സ്പെയർ പാർട്സ് ഉപയോഗിച്ചും മാത്രമേ നടത്താവൂ.
- MCCAB പരിശീലന ബോർഡിൽ ഉപയോക്തൃ-സേവനയോഗ്യമായ ഭാഗങ്ങൾ അടങ്ങിയിട്ടില്ല.
ഉദ്ദേശിച്ച ഉപയോഗം
പ്രോഗ്രാമിംഗിനെയും മൈക്രോകൺട്രോളർ സിസ്റ്റത്തിൻ്റെ ഉപയോഗത്തെയും കുറിച്ചുള്ള അറിവ് ലളിതവും വേഗത്തിലുള്ളതുമായ പഠിപ്പിക്കലിനായി MCCAB ട്രെയിനിംഗ് ബോർഡ് വികസിപ്പിച്ചെടുത്തിട്ടുണ്ട്.
പരിശീലനത്തിനും പരിശീലന ആവശ്യങ്ങൾക്കും മാത്രമായി ഉൽപ്പന്നം രൂപകൽപ്പന ചെയ്തിരിക്കുന്നു. മറ്റേതെങ്കിലും ഉപയോഗം, ഉദാ, വ്യാവസായിക ഉൽപ്പാദന സൗകര്യങ്ങളിൽ, അനുവദനീയമല്ല.
ജാഗ്രത: MCCAB ട്രെയിനിംഗ് ബോർഡ് ഒരു Arduino® NANO മൈക്രോകൺട്രോളർ സിസ്റ്റം (ചിത്രം 2 കാണുക) അല്ലെങ്കിൽ അതിനോട് 100% പൊരുത്തപ്പെടുന്ന ഒരു മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ എന്നിവയ്ക്കൊപ്പമുള്ള ഉപയോഗത്തിനായി മാത്രം ഉദ്ദേശിച്ചുള്ളതാണ്. ഈ മൊഡ്യൂൾ ഒരു ഓപ്പറേറ്റിംഗ് വോള്യം ഉപയോഗിച്ച് പ്രവർത്തിപ്പിക്കണംtage of Vcc = +5V. അല്ലാത്തപക്ഷം, മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ, ട്രെയിനിംഗ് ബോർഡ്, പരിശീലന ബോർഡുമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന ഉപകരണങ്ങൾ എന്നിവയുടെ മാറ്റാനാവാത്ത കേടുപാടുകൾ അല്ലെങ്കിൽ നാശത്തിന് സാധ്യതയുണ്ട്.
ജാഗ്രത: വാല്യംtages +8 V മുതൽ +12 V വരെയുള്ള ശ്രേണിയിലുള്ള പരിശീലന ബോർഡിൻ്റെ ഇൻപുട്ടുകൾ VX1, VX2 എന്നിവയുമായി ബന്ധിപ്പിച്ചിരിക്കാം (ഈ മാനുവലിൻ്റെ വിഭാഗം 4.2 കാണുക). വോള്യംtagപരിശീലന ബോർഡിൻ്റെ മറ്റെല്ലാ ഇൻപുട്ടുകളിലും 0 V മുതൽ +5 V വരെയുള്ള ശ്രേണിയിലായിരിക്കണം.
ജാഗ്രത: ഈ ഓപ്പറേറ്റിംഗ് നിർദ്ദേശങ്ങൾ ഉപയോക്താവിൻ്റെ പിസിയുമായും ഏതെങ്കിലും ബാഹ്യ മൊഡ്യൂളുകളുമായും MCCAB ട്രെയിനിംഗ് ബോർഡ് എങ്ങനെ ശരിയായി ബന്ധിപ്പിക്കാമെന്നും പ്രവർത്തിപ്പിക്കാമെന്നും വിവരിക്കുന്നു. ഉപയോക്താവ് മൂലമുണ്ടാകുന്ന ഓപ്പറേറ്റിംഗ് കൂടാതെ/അല്ലെങ്കിൽ കണക്ഷൻ പിശകുകളിൽ ഞങ്ങൾക്ക് യാതൊരു സ്വാധീനവുമില്ലെന്ന് ദയവായി ശ്രദ്ധിക്കുക. ഉപയോക്താവിൻ്റെ പിസിയിലേക്കും ഏതെങ്കിലും ബാഹ്യ മൊഡ്യൂളുകളിലേക്കും പരിശീലന ബോർഡിൻ്റെ ശരിയായ കണക്ഷനും അതിൻ്റെ പ്രോഗ്രാമിംഗിനും ശരിയായ പ്രവർത്തനത്തിനും ഉപയോക്താവിന് മാത്രമേ ഉത്തരവാദിത്തമുള്ളൂ! തെറ്റായ കണക്ഷൻ, തെറ്റായ നിയന്ത്രണം, തെറ്റായ പ്രോഗ്രാമിംഗ് കൂടാതെ/അല്ലെങ്കിൽ തെറ്റായ പ്രവർത്തനത്തിൻ്റെ ഫലമായുണ്ടാകുന്ന എല്ലാ നാശനഷ്ടങ്ങൾക്കും ഉപയോക്താവ് മാത്രമാണ് ഉത്തരവാദി! ഈ കേസുകളിൽ ഞങ്ങൾക്കെതിരായ ബാധ്യതാ ക്ലെയിമുകൾ മനസ്സിലാക്കാവുന്നതേയുള്ളൂ.
വ്യക്തമാക്കിയിട്ടുള്ളതല്ലാതെ മറ്റേതെങ്കിലും ഉപയോഗം അനുവദനീയമല്ല! MCCAB ട്രെയിനിംഗ് ബോർഡ് പരിഷ്കരിക്കുകയോ പരിവർത്തനം ചെയ്യുകയോ ചെയ്യരുത്, കാരണം ഇത് കേടുപാടുകൾ വരുത്തുകയോ ഉപയോക്താവിനെ അപകടപ്പെടുത്തുകയോ ചെയ്യാം (ഷോർട്ട് സർക്യൂട്ട്, അമിതമായി ചൂടാകുന്നതിനും തീപിടിക്കുന്നതിനും ഉള്ള സാധ്യത, വൈദ്യുതാഘാതത്തിനുള്ള സാധ്യത). പരിശീലന ബോർഡിൻ്റെ അനുചിതമായ ഉപയോഗത്തിൻ്റെ ഫലമായി വ്യക്തിപരമായ പരിക്കോ വസ്തുവകകൾക്ക് കേടുപാടുകളോ സംഭവിച്ചാൽ, ഇത് ഓപ്പറേറ്ററുടെ മാത്രം ഉത്തരവാദിത്തമാണ്, നിർമ്മാതാവിൻ്റെതല്ല.
MCCAB പരിശീലന ബോർഡും അതിൻ്റെ ഘടകങ്ങളും
MCCAB ട്രെയിനിംഗ് ബോർഡ് അതിൻ്റെ നിയന്ത്രണ ഘടകങ്ങളുമായി ചിത്രം 1 കാണിക്കുന്നു. പരിശീലന ബോർഡ് ഒരു ഇലക്ട്രിക്കൽ നോൺ-കണ്ടക്റ്റീവ് വർക്ക് ഉപരിതലത്തിൽ സ്ഥാപിക്കുകയും ഒരു മിനി-യുഎസ്ബി കേബിൾ വഴി ഉപയോക്താവിൻ്റെ പിസിയുമായി ബന്ധിപ്പിക്കുകയും ചെയ്യുന്നു (വിഭാഗം 4.3 കാണുക).
പ്രത്യേകിച്ചും ഇലക്ടർ പ്രസിദ്ധീകരിച്ച “മൈക്രോകൺട്രോളേഴ്സ് ഹാൻഡ്സ്-ഓൺ കോഴ്സ് ഫോർ ആർഡ്വിനോ സ്റ്റാർട്ടേഴ്സ്” (ISBN 978-3-89576-545-2) എന്നതുമായി സംയോജിപ്പിച്ച്, പ്രോഗ്രാമിംഗും ഉപയോഗവും എളുപ്പത്തിലും വേഗത്തിലും പഠിക്കാൻ MCCAB ട്രെയിനിംഗ് ബോർഡ് തികച്ചും അനുയോജ്യമാണ്. മൈക്രോകൺട്രോളർ സിസ്റ്റം. ഒരു സംയോജിത C/C++ കംപൈലർ ഉള്ള ഒരു വികസന പരിതസ്ഥിതിയായ Arduino IDE-യിൽ MCCAB ട്രെയിനിംഗ് ബോർഡിനായി ഉപയോക്താവ് തൻ്റെ പിസിയിൽ തൻ്റെ വ്യായാമ പരിപാടികൾ സൃഷ്ടിക്കുന്നു, അത് അദ്ദേഹത്തിന് സൗജന്യമായി ഡൗൺലോഡ് ചെയ്യാം. webസൈറ്റ് 
ചിത്രം 1: MCCAB ട്രെയിനിംഗ് ബോർഡ്, Rev. 3.3
MCCAB പരിശീലന ബോർഡിലെ പ്രവർത്തനവും പ്രദർശന ഘടകങ്ങളും:
- 11 × LED (ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ D2 … D12 എന്നിവയുടെ സ്റ്റാറ്റസ് സൂചന)
- LED-കൾ LD6 … LD10, GPIOs D20 … D2 എന്നിവയുമായി ബന്ധിപ്പിക്കുന്നതിനുള്ള ഹെഡർ JP12
- മൈക്രോകൺട്രോളറിൻ്റെ ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾക്കുള്ള ടെർമിനൽ ബ്ലോക്ക് SV5 (വിതരണക്കാരൻ)
- റീസെറ്റ് ബട്ടൺ
- മിനി USB - സോക്കറ്റിനൊപ്പം മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ Arduino® NANO (അല്ലെങ്കിൽ അനുയോജ്യമായത്)
- LED "L", GPIO D13-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു
- മൈക്രോകൺട്രോളർ ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾക്കുള്ള കണക്റ്റർ SV6 (വിതരണക്കാരൻ).
- പൊട്ടൻഷിയോമീറ്റർ P1
- ഓപ്പറേറ്റിംഗ് വോളിയം തിരഞ്ഞെടുക്കുന്നതിനുള്ള ഹെഡർ JP3 പിൻ ചെയ്യുകtagP1, P2 എന്നീ പൊട്ടൻഷിയോമീറ്ററുകളുടെ e
- പൊട്ടൻഷിയോമീറ്റർ P2
- കണക്ടർ സ്ട്രിപ്പ് SV4-ൻ്റെ പിൻ X-ൽ സിഗ്നൽ തിരഞ്ഞെടുക്കുന്നതിനുള്ള ഹെഡർ JP12 പിൻ ചെയ്യുക
- കണക്റ്റർ സ്ട്രിപ്പ് SV12: SPI-ഇൻ്റർഫേസ് 5 V (പിൻ X-ലെ സിഗ്നൽ JP4 വഴി തിരഞ്ഞെടുത്തു)
- കണക്റ്റർ സ്ട്രിപ്പ് SV11: SPI ഇൻ്റർഫേസ് 3.3 V
- ടെർമിനൽ ബ്ലോക്ക് SV10: IC ഇൻ്റർഫേസ് 5 V
- ടെർമിനൽ ബ്ലോക്ക് SV8: I2 C ഇൻ്റർഫേസ് 3.3 V
- ടെർമിനൽ ബ്ലോക്ക് SV9: 22 IC ഇൻ്റർഫേസ് 3.3 V
- ടെർമിനൽ ബ്ലോക്ക് SV7: ബാഹ്യ ഉപകരണങ്ങൾക്കായി സ്വിച്ചിംഗ് ഔട്ട്പുട്ട്
- 2 x 16 പ്രതീകങ്ങളുള്ള LC ഡിസ്പ്ലേ
- 6 × പുഷ്ബട്ടൺ സ്വിച്ചുകൾ K1 … K6
- 6 × സ്ലൈഡ് സ്വിച്ചുകൾ S1 … S6
- മൈക്രോകൺട്രോളറിൻ്റെ ഇൻപുട്ടുകളിലേക്ക് സ്വിച്ചുകൾ ബന്ധിപ്പിക്കുന്നതിനുള്ള ഹെഡർ JP2 പിൻ ചെയ്യുക.
- ടെർമിനൽ ബ്ലോക്ക് SV4: പ്രവർത്തന വോള്യത്തിനായുള്ള വിതരണക്കാരൻtages
- പീസോ ബസർ ബസർ1
- ടെർമിനൽ ബ്ലോക്ക് SV1: ബാഹ്യ ഉപകരണങ്ങൾക്കായി സ്വിച്ചിംഗ് ഔട്ട്പുട്ട്
- ടെർമിനൽ സ്ട്രിപ്പ് SV3: 3 × 3 LED മാട്രിക്സിൻ്റെ നിരകൾ (സീരീസ് റെസിസ്റ്ററുകൾ 6 Ω ഉള്ള D8 ... D330 ഔട്ട്പുട്ടുകൾ)
- കണക്റ്റർ സ്ട്രിപ്പ് SV2: ബാഹ്യ മൊഡ്യൂളുകൾ ബന്ധിപ്പിക്കുന്നതിന് 2 x 13 പിന്നുകൾ
- 3 × 3 LED മാട്രിക്സ് (9 ചുവന്ന LED-കൾ)
- 1 × 3 LED മാട്രിക്സിൻ്റെ വരികൾ GPIOs D3 … D3 എന്ന മൈക്രോകൺട്രോളറുമായി ബന്ധിപ്പിക്കുന്നതിനുള്ള ഹെഡർ JP5 പിൻ ചെയ്യുക
- പിൻ ഹെഡർ JP6-ൻ്റെ "ബസർ" എന്ന സ്ഥാനത്തുള്ള ഒരു ജമ്പർ, മൈക്രോകൺട്രോളറിൻ്റെ GPIO D1-മായി Buzzer9-നെ ബന്ധിപ്പിക്കുന്നു.
പരിശീലന ബോർഡിലെ വ്യക്തിഗത നിയന്ത്രണങ്ങൾ ഇനിപ്പറയുന്ന വിഭാഗങ്ങളിൽ വിശദമായി വിവരിച്ചിരിക്കുന്നു.
4.1 Arduino® നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ
നാനോ അല്ലെങ്കിൽ അതിന് അനുയോജ്യമായ ഒരു മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്ക് പ്ലഗ് ചെയ്തിരിക്കുന്നു (ചിത്രം 5 ലെ അമ്പടയാളം (1), ചിത്രം 2 ലെ ചിത്രം 1, M4 എന്നിവ കാണുക). ഈ മൊഡ്യൂളിൽ AVR മൈക്രോകൺട്രോളർ ATmega328P സജ്ജീകരിച്ചിരിക്കുന്നു, ഇത് പരിശീലന ബോർഡിലെ പെരിഫറൽ ഘടകങ്ങളെ നിയന്ത്രിക്കുന്നു. കൂടാതെ, മൊഡ്യൂളിൻ്റെ താഴത്തെ ഭാഗത്ത് ഒരു സംയോജിത കൺവെർട്ടർ സർക്യൂട്ട് ഉണ്ട്, ഇത് മൈക്രോകൺട്രോളർ UART ൻ്റെ (യൂണിവേഴ്സൽ അസിൻക്രണസ് റിസീവർ ട്രാൻസ്മിറ്റർ) സീരിയൽ ഇൻ്റർഫേസിനെ പിസിയുടെ യുഎസ്ബി ഇൻ്റർഫേസുമായി ബന്ധിപ്പിക്കുന്നു. ഉപയോക്താവ് തൻ്റെ പിസിയിൽ സൃഷ്ടിച്ച പ്രോഗ്രാമുകൾ മൈക്രോകൺട്രോളറിലേക്ക് ലോഡുചെയ്യുന്നതിനോ അല്ലെങ്കിൽ ആർഡ്വിനോ ഐഡിഇയുടെ (ഡെവലപ്മെൻ്റ് എൻവയോൺമെൻ്റ്) സീരിയൽ മോണിറ്ററിലേക്ക് ഡാറ്റ കൈമാറുന്നതിനോ ഈ ഇൻ്റർഫേസ് ഉപയോഗിക്കുന്നു. ചിത്രം 2-ലെ രണ്ട് LED-കൾ TX, RX എന്നിവ മൈക്രോകൺട്രോളറിൻ്റെ TxD, RxD എന്നീ സീരിയൽ ലൈനുകളിലെ ഡാറ്റാ ട്രാഫിക്കിനെ സൂചിപ്പിക്കുന്നു. ഒരു Arduino ®

ചിത്രം 2: മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ Arduino® NANO (ഉറവിടം: www.arduino.cc)
LED L (ചിത്രം 2-ലെ ചിത്രം 6, അമ്പടയാളം (1) കാണുക - Arduino നാനോ അനുയോജ്യമായ ക്ലോണുകൾക്ക് "L" എന്ന പദവി വ്യത്യസ്തമായിരിക്കാം) ഒരു സീരീസ് റെസിസ്റ്റർ വഴി മൈക്രോകൺട്രോളറിൻ്റെ GPIO D13 ലേക്ക് ശാശ്വതമായി ബന്ധിപ്പിച്ച് അതിൻ്റെ അവസ്ഥ LOW അല്ലെങ്കിൽ സൂചിപ്പിക്കുന്നു ഉയർന്നത്. +5 V വാല്യംtagമൊഡ്യൂളിൻ്റെ താഴെയുള്ള e റെഗുലേറ്റർ വോളിയം സ്ഥിരപ്പെടുത്തുന്നുtage Arduino ® NANO മൊഡ്യൂളിൻ്റെ VIN ഇൻപുട്ട് വഴി MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്ക് ബാഹ്യമായി വിതരണം ചെയ്യുന്നു (വിഭാഗം 4.2 കാണുക).
![]() Arduino ® NANO മൊഡ്യൂളിന് മുകളിലുള്ള RESET ബട്ടൺ അമർത്തുന്നതിലൂടെ (ചിത്രം 2-ലെ ചിത്രം 4, അമ്പടയാളം (1) എന്നിവ കാണുക) മൈക്രോകൺട്രോളർ ഒരു നിർവചിക്കപ്പെട്ട പ്രാരംഭ നിലയിലേക്ക് സജ്ജമാക്കുകയും ഇതിനകം ലോഡുചെയ്ത പ്രോഗ്രാം പുനരാരംഭിക്കുകയും ചെയ്യുന്നു. i ഉപയോക്താവിന് പ്രധാനപ്പെട്ട മൈക്രോകൺട്രോളറിൻ്റെ എല്ലാ ഇൻപുട്ടുകളും ഔട്ട്പുട്ടുകളും SV5, SV6 എന്നീ രണ്ട് ടെർമിനൽ സ്ട്രിപ്പുകളുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു (ചിത്രം 3-ലെ അമ്പടയാളം (7), അമ്പടയാളം (1). കണക്ടറുകൾ മുഖേന - ഡ്യൂപോണ്ട് കേബിളുകൾ എന്ന് വിളിക്കപ്പെടുന്നവ (ചിത്രം 3 കാണുക) - മൈക്രോകൺട്രോളറിൻ്റെ ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ (ജിപിഐഒകൾ = ജനറൽ പർപ്പസ് ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ എന്നും അറിയപ്പെടുന്നു) SV5-ൽ നയിക്കുന്നത്, SV6-നെ ഓപ്പറേറ്റിംഗ് ഘടകങ്ങളുമായി (ബട്ടണുകൾ, സ്വിച്ചുകൾ) ബന്ധിപ്പിക്കാൻ കഴിയും. , …) MCCAB പരിശീലന ബോർഡിൽ അല്ലെങ്കിൽ ബാഹ്യ ഭാഗങ്ങളിലേക്ക്.
Arduino ® NANO മൊഡ്യൂളിന് മുകളിലുള്ള RESET ബട്ടൺ അമർത്തുന്നതിലൂടെ (ചിത്രം 2-ലെ ചിത്രം 4, അമ്പടയാളം (1) എന്നിവ കാണുക) മൈക്രോകൺട്രോളർ ഒരു നിർവചിക്കപ്പെട്ട പ്രാരംഭ നിലയിലേക്ക് സജ്ജമാക്കുകയും ഇതിനകം ലോഡുചെയ്ത പ്രോഗ്രാം പുനരാരംഭിക്കുകയും ചെയ്യുന്നു. i ഉപയോക്താവിന് പ്രധാനപ്പെട്ട മൈക്രോകൺട്രോളറിൻ്റെ എല്ലാ ഇൻപുട്ടുകളും ഔട്ട്പുട്ടുകളും SV5, SV6 എന്നീ രണ്ട് ടെർമിനൽ സ്ട്രിപ്പുകളുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു (ചിത്രം 3-ലെ അമ്പടയാളം (7), അമ്പടയാളം (1). കണക്ടറുകൾ മുഖേന - ഡ്യൂപോണ്ട് കേബിളുകൾ എന്ന് വിളിക്കപ്പെടുന്നവ (ചിത്രം 3 കാണുക) - മൈക്രോകൺട്രോളറിൻ്റെ ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ (ജിപിഐഒകൾ = ജനറൽ പർപ്പസ് ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ എന്നും അറിയപ്പെടുന്നു) SV5-ൽ നയിക്കുന്നത്, SV6-നെ ഓപ്പറേറ്റിംഗ് ഘടകങ്ങളുമായി (ബട്ടണുകൾ, സ്വിച്ചുകൾ) ബന്ധിപ്പിക്കാൻ കഴിയും. , …) MCCAB പരിശീലന ബോർഡിൽ അല്ലെങ്കിൽ ബാഹ്യ ഭാഗങ്ങളിലേക്ക്.
 ചിത്രം 3: നിയന്ത്രണ ഘടകങ്ങളിലേക്ക് GPIO-കളെ ബന്ധിപ്പിക്കുന്നതിനുള്ള വ്യത്യസ്ത തരം ഡ്യൂപോണ്ട് കേബിളുകൾ
ചിത്രം 3: നിയന്ത്രണ ഘടകങ്ങളിലേക്ക് GPIO-കളെ ബന്ധിപ്പിക്കുന്നതിനുള്ള വ്യത്യസ്ത തരം ഡ്യൂപോണ്ട് കേബിളുകൾ
ആർഡ്യുനോ നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഓരോ ജിപിഐഒയും ഉപയോക്താവ് രണ്ട് കണക്ടർ സ്ട്രിപ്പുകളായ SV5, SV6 (ചിത്രം 3 ലെ അമ്പടയാളം (7), അമ്പടയാളം (1) എന്നിവയിൽ കോൺഫിഗർ ചെയ്യേണ്ടതുണ്ട്, അത് ഒരു ഡ്യൂപോണ്ട് കേബിൾ വഴി കണക്റ്ററുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. ബോർഡ് അല്ലെങ്കിൽ ഒരു ബാഹ്യ കണക്ടറിലേക്ക്, ഇൻപുട്ട് അല്ലെങ്കിൽ ഔട്ട്പുട്ട് ആയി ആവശ്യമായ ഡാറ്റ ദിശയ്ക്കായി അവൻ്റെ പ്രോഗ്രാമിൽ!
നിർദ്ദേശങ്ങൾക്കൊപ്പം ഡാറ്റ ദിശ സജ്ജീകരിച്ചിരിക്കുന്നു
പിൻ മോഡ് (gpio, ദിശ); // “gpio” എന്നതിന് അനുബന്ധ പിൻ നമ്പർ ചേർക്കുക // “ദിശ” എന്നതിന് “INPUT” അല്ലെങ്കിൽ “OUTPUT” ചേർക്കുക
Exampകുറവ്:
പിൻമോഡ്(2, ഔട്ട്പുട്ട്); // GPIO D2 ഔട്ട്പുട്ടായി സജ്ജീകരിച്ചിരിക്കുന്നു
പിൻമോഡ്(13, ഇൻപുട്ട്); // GPIO D13 ഇൻപുട്ടായി സജ്ജീകരിച്ചിരിക്കുന്നു
MCCAB ട്രെയിനിംഗ് ബോർഡിലെ Arduino® NANO മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ M4 ൻ്റെ വയറിംഗ് ചിത്രം 1 കാണിക്കുന്നു.

ചിത്രം 4: MCCAB ട്രെയിനിംഗ് ബോർഡിലെ Arduino® NANO എന്ന മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ വയറിംഗ്
Arduino® NANO എന്ന മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഏറ്റവും പ്രധാനപ്പെട്ട ഡാറ്റ:
| •ഓപ്പറേറ്റിംഗ് വോളിയംtagഇ വിസിസി: | +5 വി |
| •ബാഹ്യമായി വിതരണം ചെയ്ത പ്രവർത്തന വോളിയംtagഇ VIN-ൽ: | +8 V മുതൽ +12 V വരെ (വിഭാഗം 4.2 കാണുക) |
| •എഡിസിയുടെ അനലോഗ് ഇൻപുട്ട് പിന്നുകൾ: | 8 (AO ... A7, ഇനിപ്പറയുന്ന m കുറിപ്പുകൾ കാണുക) |
| •ഡിജിറ്റൽ ഇൻപുട്ട്/ഔട്ട്പുട്ട് പിന്നുകൾ: | 12 (D2 … D13) റെസ്പെ. 16 (കുറിപ്പുകൾ തോന്നുന്നു) |
| നാനോ മൊഡ്യൂളിൻ്റെ നിലവിലെ ഉപഭോഗം: | ഏകദേശം 20 എം.എ |
| •പരമാവധി. ഒരു GPIO-യുടെ ഇൻപുട്ട്/ഔട്ട്പുട്ട് കറൻ്റ്: | 40 എം.എ |
| എല്ലാ GPIO-കളുടെയും ഇൻപുട്ട്/ഔട്ട്പുട്ട് കറൻ്റുകളുടെ ആകെത്തുക: | പരമാവധി 200 mA |
| •ഇൻസ്ട്രക്ഷൻ മെമ്മറി (ഫ്ലാഷ് മെമ്മറി): | 32 കെ.ബി |
| •വർക്കിംഗ് മെമ്മറി (റാം മെമ്മറി): | 2 കെ.ബി |
| •EEPROM മെമ്മറി: | 1 കെ.ബി |
| •ക്ലോക്ക് ഫ്രീക്വൻസി: | 16 MHz |
| •സീരിയൽ ഇൻ്റർഫേസുകൾ: | SPI, I2C (UART നുറുങ്ങുകൾ തോന്നുന്നു) |
കുറിപ്പുകൾ
- GPIO-കൾ D0, D1 (ചിത്രം 2-ലെ മൊഡ്യൂളിൻ്റെ M1-ൻ്റെ പിൻ 1, പിൻ 4) എന്നിവ മൈക്രോകൺട്രോളറിൻ്റെ UART-ൻ്റെ RxD, TxD എന്നീ സിഗ്നലുകൾക്കൊപ്പം നൽകിയിരിക്കുന്നു, കൂടാതെ MCCAB ട്രെയിനിംഗ് ബോർഡും PC-യുടെ USB പോർട്ടും തമ്മിലുള്ള സീരിയൽ കണക്ഷനായി ഉപയോഗിക്കുന്നു. . അതിനാൽ അവ ഉപയോക്താവിന് ഒരു പരിധിവരെ മാത്രമേ ലഭ്യമാകൂ (വിഭാഗം 4.3 കൂടി കാണുക).
- GPIOs A4, A5 (ചിത്രം 23-ലെ മൊഡ്യൂളിൻ്റെ M24-ൻ്റെ പിൻ 1, പിൻ 4) എന്നിവ മൈക്രോകൺട്രോളറിൻ്റെ IC ഇൻ്റർഫേസിൻ്റെ SDA, SCL എന്നീ സിഗ്നലുകൾക്ക് അസൈൻ ചെയ്തിരിക്കുന്നു (വിഭാഗം 4.13 കാണുക) അതിനാൽ LC ഡിസ്പ്ലേയിലേക്കുള്ള സീരിയൽ കണക്ഷനായി അവ നീക്കിവച്ചിരിക്കുന്നു. MCCAB ട്രെയിനിംഗ് ബോർഡും (വിഭാഗം 4.9 കാണുക) കൂടാതെ SV2, SV8, SV9 (ചിത്രം 10-ലെ അമ്പുകൾ (15), (16), (14) എന്നീ കണക്ടർ സ്ട്രിപ്പുകളുമായി ബന്ധിപ്പിച്ചിട്ടുള്ള ബാഹ്യ I 1 C മൊഡ്യൂളുകളിലേക്കും. അതിനാൽ അവ I 2 C ആപ്ലിക്കേഷനുകൾക്ക് മാത്രമേ ഉപയോക്താവിന് ലഭ്യമാകൂ.
- പിൻസ് A6, A7 (ചിത്രം 25-ലെ ATmega26P മൈക്രോകൺട്രോളറിൻ്റെ പിൻ 328, പിൻ 4 എന്നിവ മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ (ADC) അനലോഗ് ഇൻപുട്ടുകളായി മാത്രമേ ഉപയോഗിക്കാനാകൂ. അവ ഫംഗ്ഷൻ പിൻമോഡ് () വഴി കോൺഫിഗർ ചെയ്യാൻ പാടില്ല (പോലുമല്ല ഇൻപുട്ടായി!), ഇത് A6, A7 എന്നിവ പൊട്ടൻഷിയോമീറ്ററുകളുടെ വൈപ്പർ ടെർമിനലുകളുമായി ശാശ്വതമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു (ചിത്രം 1-ലെ അമ്പടയാളം (2), അമ്പടയാളം (8), വിഭാഗം 10 കാണുക. .
- പിൻ ഹെഡർ SV0 ലെ A3 … A6 (ചിത്രം 7 ലെ അമ്പടയാളം (1)) തത്വത്തിൽ മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ-കൺവെർട്ടറിനുള്ള അനലോഗ് ഇൻപുട്ടുകളാണ്. എന്നിരുന്നാലും, 12 ഡിജിറ്റൽ GPIO-കൾ D2 … D13 ഒരു നിർദ്ദിഷ്ട ആപ്ലിക്കേഷന് പര്യാപ്തമല്ലെങ്കിൽ, A0 … A3 ഡിജിറ്റൽ ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകളായി ഉപയോഗിക്കാം. തുടർന്ന് അവരെ പിൻ നമ്പറുകൾ 14 (A0) … 17 (A3) വഴി അഭിസംബോധന ചെയ്യുന്നു. 2 ഉദാampലെസ്: പിൻമോഡ്(15, ഔട്ട്പുട്ട്); // A1 ഡിജിറ്റൽ ഔട്ട്പുട്ട് പിൻ മോഡായി ഉപയോഗിക്കുന്നു(17, INPUT); // A3 ഡിജിറ്റൽ ഇൻപുട്ടായി ഉപയോഗിക്കുന്നു
- പിൻ ഹെഡർ SV12-ലെ പിൻ D5 (ചിത്രം 3-ലെ അമ്പടയാളം (1)), പിൻ ഹെഡർ SV13-ലെ പിൻസ് D0, A3 … A6 (ചിത്രം 7-ലെ അമ്പടയാളം (1) ചിത്രത്തിൽ പിൻ ഹെഡർ JP2 (അമ്പ് (21) ലേക്ക് റൂട്ട് ചെയ്യുന്നു 1) കൂടാതെ S1 … S6 എന്ന സ്വിച്ചുകളിലേക്കോ K1... K6 എന്ന പുഷ്ബട്ടണുകളിലേക്കോ സമാന്തരമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു, വിഭാഗം 4.6 കാണുക. ഈ സാഹചര്യത്തിൽ, പിൻ മോഡ് നിർദ്ദേശത്തോടുകൂടിയ ഒരു ഡിജിറ്റൽ ഇൻപുട്ടായി ബന്ധപ്പെട്ട പിൻ കോൺഫിഗർ ചെയ്തിരിക്കണം.
A/D പരിവർത്തനത്തിൻ്റെ കൃത്യത
മൈക്രോകൺട്രോളർ ചിപ്പിനുള്ളിലെ ഡിജിറ്റൽ സിഗ്നലുകൾ അനലോഗ് അളവുകളുടെ കൃത്യതയെ ബാധിക്കുന്ന വൈദ്യുതകാന്തിക ഇടപെടലുകൾ സൃഷ്ടിക്കുന്നു.
GPIOs A0... A3 ഒരു ഡിജിറ്റൽ ഔട്ട്പുട്ടായി ഉപയോഗിക്കുന്നുവെങ്കിൽ, മറ്റൊരു അനലോഗ് ഇൻപുട്ടിൽ ഒരു അനലോഗ്/ഡിജിറ്റൽ പരിവർത്തനം നടക്കുമ്പോൾ ഇത് മാറാതിരിക്കേണ്ടത് പ്രധാനമാണ്! മറ്റ് അനലോഗ് ഇൻപുട്ടുകളിൽ ഒന്നിൽ അനലോഗ്/ഡിജിറ്റൽ പരിവർത്തന സമയത്ത് A0 ... A3 എന്നതിലെ ഡിജിറ്റൽ ഔട്ട്പുട്ട് സിഗ്നലിൻ്റെ മാറ്റം A0 … A7 ന് ഈ പരിവർത്തനത്തിൻ്റെ ഫലത്തെ ഗണ്യമായി തെറ്റിക്കാൻ കഴിയും.
ഡിജിറ്റൽ ഇൻപുട്ടുകളായി IC ഇൻ്റർഫേസ് (A4, A5, വിഭാഗം 4.13 കാണുക) അല്ലെങ്കിൽ GPIOs A0 … A3 ഉപയോഗിക്കുന്നത് അനലോഗ്/ഡിജിറ്റൽ പരിവർത്തനങ്ങളുടെ ഗുണനിലവാരത്തെ സ്വാധീനിക്കുന്നില്ല.
4.2 MCCAB ട്രെയിനിംഗ് ബോർഡിൻ്റെ വൈദ്യുതി വിതരണം
MCCAB ട്രെയിനിംഗ് ബോർഡ് നാമമാത്രമായ ഓപ്പറേറ്റിംഗ് DC വോളിയത്തിൽ പ്രവർത്തിക്കുന്നുtage യുടെ Vcc = +5 V, കണക്റ്റുചെയ്ത പിസിയിൽ നിന്നുള്ള Arduino NANO മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ മിനി-USB സോക്കറ്റ് വഴിയാണ് സാധാരണയായി വിതരണം ചെയ്യുന്നത് (ചിത്രം 5, ചിത്രം 2, അമ്പ് (5) ചിത്രം 1 ൽ). വ്യായാമ പരിപാടികൾ സൃഷ്ടിക്കുന്നതിനും പ്രക്ഷേപണം ചെയ്യുന്നതിനും പിസി സാധാരണയായി കണക്റ്റുചെയ്തിരിക്കുന്നതിനാൽ, ഇത്തരത്തിലുള്ള വൈദ്യുതി വിതരണം അനുയോജ്യമാണ്.
ഈ ആവശ്യത്തിനായി, പരിശീലന ബോർഡ് ഒരു മിനി-യുഎസ്ബി കേബിൾ വഴി ഉപയോക്താവിൻ്റെ പിസിയുടെ യുഎസ്ബി പോർട്ടുമായി ബന്ധിപ്പിച്ചിരിക്കണം. പിസി ഒരു സ്ഥിരതയുള്ള ഡിസി വോള്യം നൽകുന്നുtagഏകദേശം ഇ. +5 V, ഇത് മെയിൻ വോള്യത്തിൽ നിന്ന് ഗാൽവാനികമായി വേർതിരിച്ചിരിക്കുന്നുtage കൂടാതെ അതിൻ്റെ USB ഇൻ്റർഫേസ് വഴി പരമാവധി 0.5 A കറൻ്റ് ഉപയോഗിച്ച് ലോഡുചെയ്യാനാകും. +5 V ഓപ്പറേറ്റിംഗ് വോള്യത്തിൻ്റെ സാന്നിധ്യംtage എന്നത് മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൽ ON (അല്ലെങ്കിൽ POW, PWR) എന്ന് ലേബൽ ചെയ്തിരിക്കുന്ന LED ആണ് സൂചിപ്പിക്കുന്നത് (ചിത്രം 5, ചിത്രം 2). +5 V വാല്യംtagഇ മിനി-യുഎസ്ബി സോക്കറ്റ് വഴി വിതരണം ചെയ്യുന്നത് യഥാർത്ഥ ഓപ്പറേറ്റിംഗ് വോള്യവുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നുtagസംരക്ഷിത ഡയോഡ് D വഴി Arduino നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിലെ e Vcc. യഥാർത്ഥ പ്രവർത്തന വോളിയംtage Vcc വോളിയം കാരണം Vcc ≈ +4.7 V ലേക്ക് ചെറുതായി കുറയുന്നുtagസംരക്ഷണ ഡയോഡിലെ e ഡ്രോപ്പ് D. പ്രവർത്തന വോള്യത്തിൻ്റെ ഈ ചെറിയ കുറവ്tage Arduino® NANO മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ പ്രവർത്തനത്തെ ബാധിക്കില്ല. ® പകരമായി, പരിശീലന ബോർഡ് ഒരു ബാഹ്യ DC വോളിയം വഴി നൽകാംtagഇ ഉറവിടം. ഈ വാല്യംtage, ടെർമിനൽ VX1 അല്ലെങ്കിൽ ടെർമിനൽ VX2 എന്നിവയിൽ പ്രയോഗിക്കുന്നത് VExt = +8 ... +12 V എന്ന പരിധിയിലായിരിക്കണം. ബാഹ്യ വോളിയംtage, Arduino നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ പിൻ 30 (= VIN)-ലേക്ക് കണക്റ്റർ SV4 വഴിയോ കണക്ടർ SV2-ലേക്ക് ബന്ധിപ്പിച്ചിട്ടുള്ള ഒരു ബാഹ്യ മൊഡ്യൂളിൽ നിന്നോ നൽകുന്നു (ചിത്രം 5-ലെ ചിത്രം 4, ചിത്രം 22, അമ്പ് (26) അല്ലെങ്കിൽ അമ്പടയാളം (1) കാണുക) . കണക്റ്റുചെയ്ത പിസിയിൽ നിന്ന് അതിൻ്റെ USB സോക്കറ്റ് വഴിയാണ് ബോർഡിന് പവർ നൽകുന്നത് എന്നതിനാൽ, ഓപ്പറേറ്റിംഗ് വോള്യത്തിൻ്റെ ധ്രുവത മാറ്റുന്നത് സാധ്യമല്ല.tagഇ. രണ്ട് ബാഹ്യ വോള്യംtagVX1, VX2 കണക്ഷനുകളിലേക്ക് നൽകാനാകുന്ന es, ചിത്രം 4-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ, ഡയോഡുകൾ ഉപയോഗിച്ച് വിഘടിപ്പിക്കുന്നു. 
ഡയോഡുകൾ D2, D3 എന്നിവ രണ്ട് ബാഹ്യ വോള്യങ്ങളുടെ വിഘടിപ്പിക്കൽ നൽകുന്നുtagVX1, VX2 എന്നിവയിൽ es, കേസ് വോള്യംtage രണ്ട് ബാഹ്യ ഇൻപുട്ടുകളിലും ഒരേ സമയം അബദ്ധത്തിൽ പ്രയോഗിക്കണം, കാരണം ഡയോഡുകൾ കാരണം രണ്ട് വോള്യങ്ങളിൽ ഉയർന്നത് മാത്രംtages-ന് Arduino നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ M30-ൻ്റെ ഇൻപുട്ട് VIN (പിൻ 5, ചിത്രം 4, ചിത്രം 1 എന്നിവ കാണുക) എത്താൻ കഴിയും.
ബാഹ്യ DC വോളിയംtage അതിൻ്റെ VIN കണക്ടറിൽ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിലേക്ക് വിതരണം ചെയ്യുന്നത് +5 V ആയി കുറയ്ക്കുകയും സംയോജിത വോള്യം ഉപയോഗിച്ച് സ്ഥിരപ്പെടുത്തുകയും ചെയ്യുന്നു.tagമൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ താഴെ വശത്തുള്ള ഇ റെഗുലേറ്റർ (ചിത്രം 2 കാണുക). +5 V ഓപ്പറേറ്റിംഗ് വോളിയംtagഇ വോളിയം സൃഷ്ടിച്ചത്tage റെഗുലേറ്റർ ചിത്രം 5-ലെ ഡയോഡ് D യുടെ കാഥോഡുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. PC-യിലേക്കുള്ള USB കണക്ഷൻ പ്ലഗ് ഇൻ ചെയ്യുമ്പോൾ D യുടെ ആനോഡും പിസി +5 V പൊട്ടൻഷ്യലുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. അങ്ങനെ ഡയോഡ് D ബ്ലോക്ക് ചെയ്യപ്പെടുകയും ഇല്ല. സർക്യൂട്ടിൻ്റെ പ്രവർത്തനത്തെ ബാധിക്കുന്നു. ഈ സാഹചര്യത്തിൽ യുഎസ്ബി കേബിൾ വഴിയുള്ള വൈദ്യുതി വിതരണം സ്വിച്ച് ഓഫ് ആണ്. +3.3 V ഓക്സിലറി വോളിയംtage ഒരു ലീനിയർ വോളിയം വഴി MCCAB ട്രെയിനിംഗ് ബോർഡിൽ സൃഷ്ടിക്കപ്പെടുന്നുtag+5 V ഓപ്പറേറ്റിംഗ് വോള്യത്തിൽ നിന്നുള്ള ഇ റെഗുലേറ്റർtagമൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ e Vcc കൂടാതെ പരമാവധി 200 mA കറൻ്റ് നൽകാം.
പലപ്പോഴും പ്രോജക്റ്റുകളിൽ, ഓപ്പറേറ്റിംഗ് വോളിയത്തിലേക്കുള്ള പ്രവേശനംtages ആവശ്യമാണ്, ഉദാ, വാല്യംtagഇ ബാഹ്യ മൊഡ്യൂളുകളുടെ വിതരണം. ഈ ആവശ്യത്തിനായി, MCCAB ട്രെയിനിംഗ് ബോർഡ് വോളിയം നൽകുന്നുtage ഡിസ്ട്രിബ്യൂട്ടർ SV4 (ചിത്രം 4-ലെ ചിത്രം 21, അമ്പ് (1)), അതിൽ വോള്യത്തിന് രണ്ട് ഔട്ട്പുട്ടുകൾtage +3.3 V, വോളിയത്തിന് മൂന്ന് ഔട്ട്പുട്ടുകൾtagഎക്സ്റ്റേണൽ വോള്യത്തിനായുള്ള കണക്ഷൻ പിൻ VX5-ന് പുറമെ, e +0 V-യും ആറ് ഗ്രൗണ്ട് കണക്ഷനുകളും (GND, 1 V) ലഭ്യമാണ്.tage.
4.3 MCCAB ട്രെയിനിംഗ് ബോർഡും PC-യും തമ്മിലുള്ള USB കണക്ഷൻ
ഉപയോക്താവ് തൻ്റെ പിസിയിലെ Arduino IDE (ഡെവലപ്പ്മെൻ്റ് എൻവയോൺമെൻ്റ്) യിൽ വികസിപ്പിക്കുന്ന പ്രോഗ്രാമുകൾ ഒരു USB കേബിൾ വഴി MCCAB ട്രെയിനിംഗ് ബോർഡിലെ ATmega328P മൈക്രോകൺട്രോളറിലേക്ക് ലോഡ് ചെയ്യുന്നു. ഈ ആവശ്യത്തിനായി, MCCAB ട്രെയിനിംഗ് ബോർഡിലെ മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ (ചിത്രം 5 ലെ അമ്പടയാളം (1)) ഒരു മിനി-യുഎസ്ബി കേബിൾ വഴി ഉപയോക്താവിൻ്റെ പിസിയുടെ യുഎസ്ബി പോർട്ടിലേക്ക് കണക്റ്റുചെയ്തിരിക്കണം.
മൈക്രോകൺട്രോളർ മൊഡ്യൂളിലെ മൈക്രോകൺട്രോളർ ATmega328P ന് അതിൻ്റെ ചിപ്പിൽ അതിൻ്റേതായ USB ഇൻ്റർഫേസ് ഇല്ലാത്തതിനാൽ, ATmega328P യുടെ UART-ൻ്റെ സീരിയൽ സിഗ്നലുകളായ RxD, TxD എന്നിവയിലേക്ക് USB സിഗ്നലുകളായ D+, D- എന്നിവ പരിവർത്തനം ചെയ്യുന്നതിനായി മൊഡ്യൂളിന് അതിൻ്റെ അടിഭാഗത്ത് ഒരു ഇൻ്റഗ്രേറ്റഡ് സർക്യൂട്ട് ഉണ്ട്.
കൂടാതെ, മൈക്രോകൺട്രോളറിൻ്റെ UART വഴിയും തുടർന്നുള്ള USB കണക്ഷനും വഴി Arduino IDE-യിൽ സംയോജിപ്പിച്ചിരിക്കുന്ന സീരിയൽ മോണിറ്ററിൽ നിന്ന് ഡാറ്റ ഔട്ട്പുട്ട് ചെയ്യാനോ വായിക്കാനോ കഴിയും.
ഈ ആവശ്യത്തിനായി, Arduino IDE-യിലെ ഉപയോക്താവിന് "സീരിയൽ" ലൈബ്രറി ലഭ്യമാണ്.
പരിശീലന ബോർഡ് സാധാരണയായി ഉപയോക്താവിൻ്റെ പിസിയുടെ യുഎസ്ബി ഇൻ്റർഫേസ് വഴിയാണ് പ്രവർത്തിക്കുന്നത് (വിഭാഗം 4.2 കാണുക).
ബാഹ്യ ഉപകരണങ്ങളുമായുള്ള സീരിയൽ ആശയവിനിമയത്തിന് (ഉദാ. WLAN, ബ്ലൂടൂത്ത് ട്രാൻസ്സീവറുകൾ അല്ലെങ്കിൽ സമാനമായത്) പിൻ ഹെഡർ SV5 (ചിത്രം 3-ലെ അമ്പടയാളം (1)) ലേക്ക് കണക്റ്റ് ചെയ്തിരിക്കുന്ന മൈക്രോകൺട്രോളറിൻ്റെ RX, TX എന്നീ സിഗ്നലുകൾ ഉപയോക്താവ് ഉപയോഗിക്കുന്നത് ഉദ്ദേശിച്ചുള്ളതല്ല. , കാരണം ഇത് നിലവിലുള്ള സംരക്ഷിത റെസിസ്റ്ററുകൾ ഉണ്ടായിരുന്നിട്ടും മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ (വിഭാഗം 4.1 കാണുക) താഴെയുള്ള സംയോജിത USB UART കൺവെർട്ടർ സർക്യൂട്ടിനെ നശിപ്പിക്കും! ഉപയോക്താവ് അത് എങ്ങനെയായാലും ചെയ്യുകയാണെങ്കിൽ, ഒരേ സമയം പിസിയും ആർഡ്വിനോ നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളും തമ്മിൽ ആശയവിനിമയം ഇല്ലെന്ന് ഉറപ്പാക്കേണ്ടതുണ്ട്! യുഎസ്ബി സോക്കറ്റ് വഴി നൽകുന്ന സിഗ്നലുകൾ ബാഹ്യ ഉപകരണവുമായുള്ള ആശയവിനിമയം തകരാറിലാകുന്നതിനും ഏറ്റവും മോശമായ സാഹചര്യത്തിൽ ഹാർഡ്വെയറിന് കേടുപാടുകൾ വരുത്തുന്നതിനും ഇടയാക്കും! ®
4.4 മൈക്രോകൺട്രോളറിൻ്റെ GPIO-കളുടെ സ്റ്റാറ്റസ് സൂചനയ്ക്കായി പതിനൊന്ന് LED-കൾ D2 … D12
ചിത്രം 1-ൻ്റെ താഴെ ഇടത് ഭാഗത്ത് നിങ്ങൾക്ക് 11 LED-കൾ LED10 … LED20 (ചിത്രം 1-ൽ അമ്പ് (1)) കാണാൻ കഴിയും, അത് മൈക്രോകൺട്രോളറിൻ്റെ ഇൻപുട്ടുകളുടെ/ഔട്ട്പുട്ടുകളുടെ (GPIOs) D2 … D12 ൻ്റെ നില സൂചിപ്പിക്കാൻ കഴിയും.
അനുബന്ധ സർക്യൂട്ട് ഡയഗ്രം ചിത്രം 4 ൽ കാണിച്ചിരിക്കുന്നു.
പിൻ ഹെഡറിൻ്റെ JP6 (ചിത്രം 2 ലെ അമ്പടയാളം (1)) ൻ്റെ അനുബന്ധ സ്ഥാനത്തേക്ക് ഒരു ജമ്പർ പ്ലഗ് ചെയ്തിട്ടുണ്ടെങ്കിൽ, ബന്ധപ്പെട്ട ലൈറ്റ് എമിറ്റിംഗ് ഡയോഡ് GPIO-യുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു.
JP2-ലെ ജമ്പർ പ്ലഗ് ഇൻ ചെയ്യുമ്പോൾ അനുബന്ധ GPIO D12 … D5 ഉയർന്ന നിലയിലാണെങ്കിൽ (+6 V), അസൈൻ ചെയ്ത LED പ്രകാശിക്കുന്നു, GPIO കുറവാണെങ്കിൽ (GND, 0 V), LED സ്വിച്ച് ഓഫ് ചെയ്യും.
![]() GPIOs D2... D12 എന്നിവയിൽ ഒരെണ്ണം ഇൻപുട്ടായി ഉപയോഗിക്കുകയാണെങ്കിൽ, LED-ൻ്റെ പ്രവർത്തന കറൻ്റ് (ഏകദേശം 2 … 3 mA).
GPIOs D2... D12 എന്നിവയിൽ ഒരെണ്ണം ഇൻപുട്ടായി ഉപയോഗിക്കുകയാണെങ്കിൽ, LED-ൻ്റെ പ്രവർത്തന കറൻ്റ് (ഏകദേശം 2 … 3 mA).
GPIO D13 ൻ്റെ നില, മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൽ നേരിട്ട് അതിൻ്റെ LED L ആണ് സൂചിപ്പിക്കുന്നത് (ചിത്രം 1, ചിത്രം 2 കാണുക). LED L നിർജ്ജീവമാക്കാൻ കഴിയില്ല.
ഇൻപുട്ടുകൾ/ഔട്ട്പുട്ടുകൾ A0 … A7 അടിസ്ഥാനപരമായി മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിനോ പ്രത്യേക ടാസ്ക്കുകൾക്കോ (TWI ഇൻ്റർഫേസ്) അനലോഗ് ഇൻപുട്ടുകളായി ഉപയോഗിക്കുന്നതിനാൽ, ഈ പ്രവർത്തനങ്ങളെ തകരാറിലാക്കാതിരിക്കാൻ അവയ്ക്ക് ഡിജിറ്റൽ LED സ്റ്റാറ്റസ് ഡിസ്പ്ലേ ഇല്ല.
4.5 പൊട്ടൻഷിയോമീറ്ററുകൾ P1, P2
ചിത്രം 1 (ചിത്രം 2 ലെ അമ്പടയാളം (1), അമ്പ് (8) എന്നിവയുടെ ചുവടെയുള്ള രണ്ട് പൊട്ടൻഷിയോമീറ്ററുകൾ P10, P1 എന്നിവയുടെ റോട്ടറി അക്ഷങ്ങൾ വോള്യം സജ്ജമാക്കാൻ ഉപയോഗിക്കാം.tag0 പരിധിയിലാണ് … അവരുടെ വൈപ്പർ കണക്ഷനുകളിൽ VPot.
രണ്ട് പൊട്ടൻഷിയോമീറ്ററുകളുടെ വയറിംഗ് ചിത്രം 6 ൽ കാണാം.

ചിത്രം 6: P1, P2 എന്നീ പൊട്ടൻഷിയോമീറ്ററുകളുടെ വയറിംഗ്
രണ്ട് പൊട്ടൻഷിയോമീറ്ററുകളുടെ വൈപ്പർ കണക്ഷനുകൾ സംരക്ഷിത റെസിസ്റ്ററുകളായ R6, R7 വഴി Arduino® നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ അനലോഗ് ഇൻപുട്ടുകൾ A23, A24 എന്നിവയുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ഡയോഡുകൾ D4, D6 അല്ലെങ്കിൽ D5, D7 മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ് ഇൻപുട്ടിനെ വളരെ ഉയർന്നതോ നെഗറ്റീവ് വോള്യത്തിൽ നിന്നോ സംരക്ഷിക്കുന്നു.tages.
ജാഗ്രത:
മൈക്രോകൺട്രോളറിൻ്റെ ആന്തരിക ചിപ്പ് ആർക്കിടെക്ചർ കാരണം ATmega6P-യുടെ A7, A328 പിൻസ് എപ്പോഴും അനലോഗ് ഇൻപുട്ടുകളാണ്. Arduino IDE-യുടെ pinMode() എന്ന ഫംഗ്ഷൻ ഉപയോഗിച്ചുള്ള അവരുടെ കോൺഫിഗറേഷൻ അനുവദനീയമല്ല, ഇത് പ്രോഗ്രാമിൻ്റെ തെറ്റായ പെരുമാറ്റത്തിലേക്ക് നയിച്ചേക്കാം.
മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടർ വഴി, സെറ്റ് വോളിയംtage ലളിതമായ രീതിയിൽ അളക്കാൻ കഴിയും.
Exampകണക്ഷൻ A1-ൽ പൊട്ടൻഷിയോമീറ്റർ P6 ൻ്റെ മൂല്യം വായിക്കുന്നതിനുള്ള le: int z = analogRead(A6);
വോളിയത്തിൽ നിന്ന് കണക്കാക്കുന്ന 10-ബിറ്റ് സംഖ്യാ മൂല്യം ZtagZ = അനുസരിച്ച് A6-ൽ e![]() (വിഭാഗം 1-ൽ നിന്നുള്ള സമവാക്യം 5) 1024⋅
(വിഭാഗം 1-ൽ നിന്നുള്ള സമവാക്യം 5) 1024⋅
ആവശ്യമുള്ള ഉയർന്ന പരിധി VPot = +3.3 V resp. ക്രമീകരണ ശ്രേണിയുടെ VPot = +5 V പിൻ ഹെഡർ JP3 ഉപയോഗിച്ച് സജ്ജീകരിച്ചിരിക്കുന്നു (ചിത്രം 9 ലെ അമ്പടയാളം (1)). VPot തിരഞ്ഞെടുക്കാൻ, JP1-ൻ്റെ പിൻ 3 അല്ലെങ്കിൽ പിൻ 3 ഒരു ജമ്പർ ഉപയോഗിച്ച് pin2-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ഏത് വാല്യംtagVPot-ന് വേണ്ടി e എന്നത് JP3 ഉപയോഗിച്ച് സജ്ജീകരിക്കേണ്ടതുണ്ട് റഫറൻസ് വോളിയത്തെ ആശ്രയിച്ചിരിക്കുന്നുtagപിൻ ഹെഡർ SV6 ൻ്റെ REF കണക്റ്ററിലെ അനലോഗ്/ഡിജിറ്റൽ-കൺവെർട്ടറിൻ്റെ e VREF (ചിത്രം 7 ലെ അമ്പടയാളം (1)), വിഭാഗം 5 കാണുക.
റഫറൻസ് വാല്യംtagSV6 പിൻ ഹെഡറിൻ്റെ REF ടെർമിനലിലെ A/D-കൺവെർട്ടറിൻ്റെ e VREF, വോളിയംtagJP3 ഉപയോഗിച്ച് വ്യക്തമാക്കിയ e VPot പൊരുത്തപ്പെടണം.
4.6 സ്വിച്ചുകൾ S1 … S6, ബട്ടണുകൾ K1 … K6
MCCAB ട്രെയിനിംഗ് ബോർഡ് ഉപയോക്താവിന് അവൻ്റെ വ്യായാമങ്ങൾക്കായി ആറ് പുഷ്ബട്ടണുകളും ആറ് സ്ലൈഡ് സ്വിച്ചുകളും നൽകുന്നു (ചിത്രം 20 ൽ അമ്പടയാളങ്ങൾ (19), (1). ചിത്രം 7 അവരുടെ വയറിംഗ് കാണിക്കുന്നു. മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ M1 ൻ്റെ ഇൻപുട്ടുകളിൽ ഒന്നിലേക്ക് സ്ഥിരമായോ പൾസ് സിഗ്നലോ പ്രയോഗിക്കാനുള്ള ഓപ്ഷൻ ഉപയോക്താവിന് നൽകുന്നതിന്, ഒരു സ്ലൈഡ് സ്വിച്ച്, ഒരു പുഷ്ബട്ടൺ സ്വിച്ച് എന്നിവ സമാന്തരമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ആറ് സ്വിച്ച് ജോഡികളിൽ ഓരോന്നിൻ്റെയും പൊതുവായ ഔട്ട്പുട്ട് ഒരു പ്രൊട്ടക്റ്റീവ് റെസിസ്റ്റർ (R25 … R30) വഴി പിൻ ഹെഡറായ JP2 (ചിത്രം 21 ലെ അമ്പടയാളം (1)) ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഒരു സ്ലൈഡ് സ്വിച്ച്, ഒരു സാധാരണ ഓപ്പറേറ്റിംഗ് റെസിസ്റ്റർ (R31 ... R36) ഉള്ള ഒരു പുഷ്ബട്ടൺ സ്വിച്ച് എന്നിവയുടെ സമാന്തര കണക്ഷൻ ഒരു ലോജിക്കൽ അല്ലെങ്കിൽ ഓപ്പറേഷൻ പോലെ പ്രവർത്തിക്കുന്നു: രണ്ട് സ്വിച്ചുകളിലൊന്ന് (അല്ലെങ്കിൽ രണ്ട് സ്വിച്ചുകളും ഒരേ സമയം) +5 V വോളിയംtage കോമൺ വർക്കിംഗ് റെസിസ്റ്ററിൽ ഉണ്ട്, പ്രൊട്ടക്റ്റീവ് റെസിസ്റ്റർ വഴിയുള്ള ഈ ലോജിക്കൽ ഹൈ ലെവൽ JP2 ൻ്റെ അനുബന്ധ പിൻ 4, 6, 8, 10, 12 അല്ലെങ്കിൽ 2 ലും ഉണ്ട്. രണ്ട് സ്വിച്ചുകളും തുറന്നിരിക്കുമ്പോൾ മാത്രം, അവയുടെ പൊതുവായ കണക്ഷൻ തുറക്കുകയും പിൻ ഹെഡറിൻ്റെ JP2 ൻ്റെ അനുബന്ധ പിൻ പ്രൊട്ടക്റ്റീവ് റെസിസ്റ്ററിൻ്റെയും വർക്കിംഗ് റെസിസ്റ്ററിൻ്റെയും സീരീസ് കണക്ഷൻ വഴി ലോ ലെവലിലേക്ക് (0 V, GND) വലിക്കുകയും ചെയ്യും.
ചിത്രം 7: സ്ലൈഡ് / പുഷ്ബട്ടൺ സ്വിച്ചുകളുടെ വയറിംഗ് S1 ... S6 / K1 ... K6
പിൻ ഹെഡർ JP2 ൻ്റെ ഓരോ പിൻ അതിൻ്റെ അസൈൻ ഇൻപുട്ട് A0 … A3, D12 അല്ലെങ്കിൽ Arduino യുടെ D13 ലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും
ഒരു ജമ്പർ വഴിയുള്ള നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂൾ. അസൈൻമെൻ്റ് ചിത്രം 7-ൽ കാണിച്ചിരിക്കുന്നു.
പകരമായി, പിൻ ഹെഡർ JP2 ൻ്റെ പിൻ 4, 6, 8, 10, 12 അല്ലെങ്കിൽ 2 എന്നിവയിലെ ഒരു സ്വിച്ച് കണക്ഷൻ, SV2 അല്ലെങ്കിൽ SV13 പിൻ ഹെഡറുകളിലെ Arduino® മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഏതെങ്കിലും ഇൻപുട്ട് D0 … D3 അല്ലെങ്കിൽ A5 ... A6 ലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും ( ചിത്രം 3-ലെ അമ്പടയാളവും (7) അമ്പടയാളവും (1) ഒരു ഡ്യൂപോണ്ട് കേബിൾ ഉപയോഗിക്കുന്നു. ATmega328P മൈക്രോകൺട്രോളറിൻ്റെ നിയുക്ത GPIO ഒരു പ്രത്യേക ഫംഗ്ഷനുപയോഗിക്കുകയാണെങ്കിൽ (A/D-കൺവെർട്ടർ ഇൻപുട്ട്, PWM ഔട്ട്പുട്ട് …) ഓരോ സ്വിച്ചിൻ്റെയും നിശ്ചിത അസൈൻമെൻ്റിനെ അപേക്ഷിച്ച് ഈ വഴക്കമുള്ള കണക്ഷൻ രീതിയാണ് അഭികാമ്യം. ഇതുവഴി ഉപയോക്താവിന് തൻ്റെ സ്വിച്ചുകൾ ബന്ധപ്പെട്ട ആപ്ലിക്കേഷനിൽ സൗജന്യമായ GPIO-കളിലേക്ക് കണക്റ്റുചെയ്യാനാകും, അതായത്, ഒരു പ്രത്യേക ഫംഗ്ഷൻ ഉപയോഗിക്കാത്തത്.
തൻ്റെ പ്രോഗ്രാമിൽ, ഇൻസ്ട്രക്ഷൻ പിൻമോഡ് (gpio, INPUT) ഉപയോഗിച്ച് ഒരു സ്വിച്ച് പോർട്ടിലേക്ക് കണക്റ്റ് ചെയ്തിരിക്കുന്ന ആർഡ്യുനോ നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഓരോ ജിപിഐഒയും ഉപയോക്താവ് ഇൻപുട്ടായി കോൺഫിഗർ ചെയ്യണം; // "gpio" എന്നതിന് അനുബന്ധ പിൻ നമ്പർ ചേർക്കുക
Example: പിൻമോഡ്(A1, INPUT); // S1|K2-നുള്ള ഡിജിറ്റൽ ഇൻപുട്ടായി A2 സജ്ജീകരിച്ചിരിക്കുന്നു
ഒരു സ്വിച്ചുമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന മൈക്രോകൺട്രോളറിൻ്റെ ഒരു GPIO അബദ്ധത്തിൽ ഔട്ട്പുട്ടായി കോൺഫിഗർ ചെയ്തിട്ടുണ്ടെങ്കിൽ, സംരക്ഷിത റെസിസ്റ്ററുകൾ R25 … R30 സ്വിച്ച് പ്രവർത്തനക്ഷമമാകുമ്പോൾ, GPIO-ന് താഴ്ന്ന നിലയിലായിരിക്കുമ്പോൾ +5 V നും GND (0 V) നും ഇടയിലുള്ള ഒരു ഷോർട്ട് തടയുന്നു. അതിൻ്റെ ഔട്ട്പുട്ടിൽ.
ഒരു പുഷ്ബട്ടൺ സ്വിച്ച് ഉപയോഗിക്കുന്നതിന്, അതിന് സമാന്തരമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന സ്ലൈഡ് സ്വിച്ച് തുറന്നിരിക്കണം (സ്ഥാനം "0")! അല്ലെങ്കിൽ, പുഷ്ബട്ടൺ സ്വിച്ചിൻ്റെ സ്ഥാനം പരിഗണിക്കാതെ തന്നെ അവയുടെ പൊതുവായ ഔട്ട്പുട്ട് ശാശ്വതമായി ഉയർന്ന തലത്തിലാണ്.
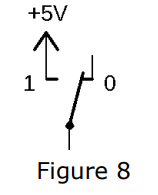
![]() സ്ലൈഡ് സ്വിച്ചുകളുടെ സ്വിച്ച് സ്ഥാനങ്ങൾ ചിത്രം 0 ൽ കാണിച്ചിരിക്കുന്നതുപോലെ പരിശീലന ബോർഡിൽ "1", "1" എന്നിങ്ങനെ അടയാളപ്പെടുത്തിയിരിക്കുന്നു.
സ്ലൈഡ് സ്വിച്ചുകളുടെ സ്വിച്ച് സ്ഥാനങ്ങൾ ചിത്രം 0 ൽ കാണിച്ചിരിക്കുന്നതുപോലെ പരിശീലന ബോർഡിൽ "1", "1" എന്നിങ്ങനെ അടയാളപ്പെടുത്തിയിരിക്കുന്നു.
ചിത്രം 8 കാണിക്കുന്നു: സ്വിച്ച് "1" സ്ഥാനത്താണെങ്കിൽ, സ്വിച്ച് ഔട്ട്പുട്ട് +5 V (HIGH) ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു, "0" സ്ഥാനത്ത് സ്വിച്ച് ഔട്ട്പുട്ട് തുറന്നിരിക്കുന്നു.
4.7 പീസോ ബസർ ബസർ1
ചിത്രം 1-ൻ്റെ മുകളിൽ ഇടത് ഭാഗം Buzzer1 (ചിത്രം 23-ൽ അമ്പ് (1)) കാണിക്കുന്നു, ഇത് ഉപയോക്താവിനെ വ്യത്യസ്ത ആവൃത്തികളുടെ ടോണുകൾ പുറപ്പെടുവിക്കാൻ അനുവദിക്കുന്നു. ഇതിൻ്റെ അടിസ്ഥാന സർക്യൂട്ട് ചിത്രം 9 ൽ കാണിച്ചിരിക്കുന്നു.
പിൻ ഹെഡർ JP1 (ചിത്രം 9 ലെ അമ്പടയാളം (6)) (ചിത്രം 29, ചിത്രം 1, അമ്പടയാളം (9) എന്നിവ കാണുക. ചിത്രം 4 ൽ). മറ്റ് ആവശ്യങ്ങൾക്കായി ഒരു പ്രോഗ്രാമിൽ GPIO D2 ആവശ്യമെങ്കിൽ ജമ്പർ നീക്കം ചെയ്യാവുന്നതാണ്.
ജമ്പർ നീക്കം ചെയ്താൽ, ഒരു ഡ്യുപോണ്ട് കേബിൾ വഴി പിൻ ഹെഡർ JP24-ൻ്റെ പിൻ 6 പിൻ ചെയ്യാൻ ഒരു ബാഹ്യ സിഗ്നൽ പ്രയോഗിക്കാനും Buzzer1 വഴി അത് ഔട്ട്പുട്ട് ചെയ്യാനും സാധിക്കും. 
ചിത്രം 9: Buzzer1 ൻ്റെ വയറിംഗ്
ടോണുകൾ സൃഷ്ടിക്കുന്നതിന്, മൈക്രോകൺട്രോളറിൻ്റെ ഔട്ട്പുട്ട് D9-ൽ ആവശ്യമുള്ള ടോൺ ഫ്രീക്വൻസിയിൽ മാറ്റം വരുത്തുന്ന ഒരു സിഗ്നൽ ഉപയോക്താവ് തൻ്റെ പ്രോഗ്രാമിൽ സൃഷ്ടിക്കണം (ചിത്രം 9-ൽ വലതുവശത്ത് വരച്ചിരിക്കുന്നത്).
ഉയർന്നതും താഴ്ന്നതുമായ ലെവലുകളുടെ ഈ ദ്രുത ക്രമം ഒരു ദീർഘചതുരാകൃതിയിലുള്ള എസി വോള്യം പ്രയോഗിക്കുന്നുtage മുതൽ Buzzer1 വരെ, ഉചിതമായ ടോൺ ഫ്രീക്വൻസിയിൽ ശബ്ദ വൈബ്രേഷനുകൾ ഉൽപ്പാദിപ്പിക്കുന്നതിന് ബസറിനുള്ളിലെ സെറാമിക് പ്ലേറ്റ് ഇടയ്ക്കിടെ രൂപഭേദം വരുത്തുന്നു.
മൈക്രോകൺട്രോളറിൻ്റെ T/C1 (ടൈമർ/കൗണ്ടർ 1) ഉപയോഗിക്കുക എന്നതാണ് ഒരു ടോൺ ജനറേറ്റ് ചെയ്യാനുള്ള ഇതിലും ലളിതമായ മാർഗ്ഗം: Arduino NANO മൈക്രോകൺട്രോളർ മൊഡ്യൂളിലെ AVR മൈക്രോകൺട്രോളർ ATmega1P-യുടെ T/C1 ഔട്ട്പുട്ട് OC328A, മൈക്രോകൺട്രോളറിനുള്ളിലെ GPIO D9-ലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും. ചിപ്പ്. T/C1 ൻ്റെ ഉചിതമായ പ്രോഗ്രാമിംഗ് ഉപയോഗിച്ച്, f = ® 1 ആവൃത്തിയിലുള്ള ഒരു ദീർഘചതുര സിഗ്നൽ സൃഷ്ടിക്കുന്നത് വളരെ എളുപ്പമാണ്. (T എന്നത് ദീർഘചതുരം സിഗ്നലിൻ്റെ കാലഘട്ടമാണ്) ബസർ ആവശ്യമുള്ള ടോണിലേക്ക് പരിവർത്തനം ചെയ്യുന്നു. പീസോ ബസർ ഒരു ഹൈ-ഫൈ ലൗഡ് സ്പീക്കർ അല്ലെന്ന് ചിത്രം 10 കാണിക്കുന്നു. കാണാനാകുന്നതുപോലെ, ഒരു പീസോ ബസറിൻ്റെ ഫ്രീക്വൻസി പ്രതികരണം രേഖീയമാണ്. ചിത്രം 10 ലെ ഡയഗ്രം, സിഗ്നൽ ഫ്രീക്വൻസിയുടെ പ്രവർത്തനമായി 2155 മീറ്റർ അകലത്തിൽ അളക്കുന്ന സോണിട്രോണിൽ നിന്നുള്ള പീസോ ട്രാൻസ്ഡ്യൂസർ SAST-1 ൻ്റെ ശബ്ദ സമ്മർദ്ദ നില (SPL) കാണിക്കുന്നു. ഭൗതിക ഗുണങ്ങളും സ്വാഭാവിക അനുരണനങ്ങളും കാരണം, ചില ആവൃത്തികൾ ഉച്ചത്തിൽ പുനർനിർമ്മിക്കുന്നു, മറ്റുള്ളവ മൃദുവാകുന്നു. MCCAB ട്രെയിനിംഗ് ബോർഡിലെ piezo buzzer-ൻ്റെ അനുബന്ധ ഡയഗ്രം സമാനമായ ഒരു വക്രം കാണിക്കുന്നു.

ചിത്രം 10: ഒരു പീസോ ബസറിൻ്റെ സാധാരണ ആവൃത്തി പ്രതികരണം (ചിത്രം: സോണിട്രോൺ)
ഈ പരിമിതി ഉണ്ടായിരുന്നിട്ടും, മൈക്രോകൺട്രോളർ സൃഷ്ടിക്കുന്ന ശബ്ദങ്ങളുടെ പുനരുൽപാദന നിലവാരവും ബോർഡിലെ അതിൻ്റെ കാൽപ്പാടും തമ്മിലുള്ള ഒരു നല്ല വിട്ടുവീഴ്ചയാണ് പീസോ ബസർ, ഇത് ഒരു ചെറിയ സ്ഥലത്ത് ഉൾക്കൊള്ളാൻ അനുവദിക്കുന്നു. ഉയർന്ന നിലവാരമുള്ള ശബ്ദ ഔട്ട്പുട്ട് ആവശ്യമുള്ള സന്ദർഭങ്ങളിൽ, ജമ്പർ നീക്കം ചെയ്ത് ഔട്ട്പുട്ട് D9-ൽ നിന്ന് piezo Buzzer വിച്ഛേദിക്കുകയും പിൻ ഹെഡർ SV9-ൽ ശബ്ദ പുനരുൽപാദനത്തിനായി D5-നെ ബാഹ്യ ഉപകരണങ്ങളുമായി ബന്ധിപ്പിക്കുകയും ചെയ്യാം, ഉദാഹരണത്തിന്, ഒരു Dupont കേബിൾ വഴി (ആവശ്യമെങ്കിൽ. , ഒരു വോള്യം വഴിtagകുറയ്ക്കാൻ ഇ ഡിവൈഡർ ampഇൻപുട്ടിൻ്റെ കേടുപാടുകൾ ഒഴിവാക്കാൻ litude stagഒപ്പം).
4.8 3 × 3 LED മാട്രിക്സ്
ചിത്രം 9-ൻ്റെ ഇടതുഭാഗത്തുള്ള 1 LED-കൾ 3 നിരകളും 3 വരികളും (ചിത്രം 27-ൽ അമ്പ് (1)) ഉള്ള ഒരു മാട്രിക്സിൽ ക്രമീകരിച്ചിരിക്കുന്നു. അവയുടെ സർക്യൂട്ട് ചിത്രം 11-ൽ കാണിച്ചിരിക്കുന്നു. മാട്രിക്സ് ക്രമീകരണം കാരണം 9 എൽഇഡികൾ മൈക്രോകൺട്രോളറിൻ്റെ 6 ജിപിഐഒകൾ ഉപയോഗിച്ച് മാത്രമേ നിയന്ത്രിക്കാനാകൂ.
ചിത്രം 8-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ, മൈക്രോകൺട്രോളറിൻ്റെ D7, D6, D11 എന്നീ മൂന്ന് നിരകളുള്ള വരികൾ A, B, C എന്നിവ ശാശ്വതമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. കോളം ലൈനുകളിലെ R5 ... R7 എന്നീ മൂന്ന് റെസിസ്റ്ററുകൾ LED-കളിലൂടെയുള്ള കറൻ്റ് പരിമിതപ്പെടുത്തുന്നു. കൂടാതെ, കോളം ലൈനുകൾ കണക്റ്റർ SV3 (ചിത്രം 25 ലെ അമ്പ് (1)) ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
മൂന്ന്-വരി കണക്ഷനുകൾ 1, 2, 3 എന്നിവ പിൻ ഹെഡർ JP1 (ചിത്രം 28 ലെ അമ്പടയാളം (1)) ലേക്ക് വഴിതിരിച്ചുവിടുന്നു. അവയെ ജമ്പറുകൾ വഴി മൈക്രോകൺട്രോളറിൻ്റെ പിന്നുകൾ D3 … D5 ലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും. പകരമായി, ഹെഡർ JP1-ലെ പിൻസ് 2, 3 അല്ലെങ്കിൽ 1 ഡ്യൂപോണ്ട് കേബിളുകൾ വഴി ഏത് ഔട്ട്പുട്ട് D2 … D13 അല്ലെങ്കിൽ A0 ... A3 ലേക്ക് SV5, SV6 എന്നീ ഹെഡറുകളിലെയും Arduino നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളുമായി ബന്ധിപ്പിക്കാവുന്നതാണ് (അമ്പ് (3), ആരോ (7) ചിത്രം 1-ൽ) ഒരു പ്രത്യേക പ്രവർത്തനത്തിനായി, Arduino ® NANO മൈക്രോകൺട്രോളർ മൊഡ്യൂളിലെ ATmega3P എന്ന മൈക്രോകൺട്രോളറിൻ്റെ D5 … D328-ൻ്റെ നിയുക്ത GPIO-കളിൽ ഒന്ന് ഉപയോഗിക്കുന്നുവെങ്കിൽ. 9 LED-കൾ A1 ... C3 എന്ന് ലേബൽ ചെയ്തിരിക്കുന്നു, മാട്രിക്സിനുള്ളിലെ അവയുടെ ക്രമീകരണം അനുസരിച്ച്, ഉദാ, LED B1 നിര B നിരയിലും വരി 1 ലും സ്ഥിതിചെയ്യുന്നു.
 ചിത്രം 11: 3 × 3 മാട്രിക്സിൻ്റെ രൂപത്തിലുള്ള ഒമ്പത് LED-കൾ
ചിത്രം 11: 3 × 3 മാട്രിക്സിൻ്റെ രൂപത്തിലുള്ള ഒമ്പത് LED-കൾ
എൽഇഡികൾ സാധാരണയായി ഉപയോക്തൃ പ്രോഗ്രാം നിയന്ത്രിക്കുന്നത് അനന്തമായ ലൂപ്പിലാണ്, അതിൽ 1, 2, 3 എന്നീ മൂന്ന് വരികളിൽ ഒന്ന് ചാക്രികമായി കുറഞ്ഞ പൊട്ടൻഷ്യലിലേക്ക് സജ്ജീകരിച്ചിരിക്കുന്നു, മറ്റ് രണ്ട് വരികൾ ഉയർന്ന തലത്തിലേക്ക് സജ്ജീകരിച്ചിരിക്കുന്നു അല്ലെങ്കിൽ ഉയർന്ന പ്രതിരോധത്തിലായിരിക്കും. സംസ്ഥാനം (Hi-Z). നിലവിൽ ലോ ലെവൽ ആക്റ്റിവേറ്റ് ചെയ്തിരിക്കുന്ന വരിയിലെ ഒന്നോ അതിലധികമോ എൽഇഡികൾ പ്രകാശിക്കണമെങ്കിൽ, അതിൻ്റെ കോളം ടെർമിനൽ എ, ബി അല്ലെങ്കിൽ സി ഹൈ ലെവലിലേക്ക് സജ്ജീകരിച്ചിരിക്കുന്നു. സജീവമായ വരിയിലെ LED- കളുടെ കോളം ടെർമിനലുകൾ കത്തിക്കാൻ പാടില്ലാത്തതാണ്. ഉദാample, LED- കൾ A3, C3 എന്നിവ പ്രകാശമാനമാക്കുന്നതിന്, വരി 3 താഴ്ന്ന നിലയിലും A, C നിരകൾ ഉയർന്ന തലത്തിലും ആയിരിക്കണം, അതേസമയം B നിര താഴ്ന്ന നിലയിലും 1, 2 വരി വരികളും ഉയർന്ന തലത്തിലോ ഉള്ളിലോ ആയിരിക്കണം. ഉയർന്ന പ്രതിരോധ നില (Hi-Z).
![]() ജാഗ്രത: 3 × 3 LED മാട്രിക്സിൻ്റെ വരി വരികൾ ഒന്നുകിൽ GPIOs D3 … D5 ലേക്ക് പിൻ ഹെഡർ JP1-ലെ ജമ്പറുകൾ വഴിയോ ഡ്യൂപോണ്ട് കേബിളുകൾ വഴി മൈക്രോകൺട്രോളറിൻ്റെ മറ്റ് GPIO-കളുമായോ ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ഈ വരി ലൈനുകളും കോളം ലൈനുകളും D6 ... D8 ഒരു പ്രോഗ്രാമിലെ മറ്റ് ജോലികൾക്കായി ഒരിക്കലും ഉപയോഗിക്കരുത്. മാട്രിക്സ് GPIO-കളുടെ ഇരട്ട അസൈൻമെൻ്റ് തകരാറുകളിലേക്കോ പരിശീലന ബോർഡിന് കേടുപാടുകളിലേക്കോ നയിക്കും!
ജാഗ്രത: 3 × 3 LED മാട്രിക്സിൻ്റെ വരി വരികൾ ഒന്നുകിൽ GPIOs D3 … D5 ലേക്ക് പിൻ ഹെഡർ JP1-ലെ ജമ്പറുകൾ വഴിയോ ഡ്യൂപോണ്ട് കേബിളുകൾ വഴി മൈക്രോകൺട്രോളറിൻ്റെ മറ്റ് GPIO-കളുമായോ ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ഈ വരി ലൈനുകളും കോളം ലൈനുകളും D6 ... D8 ഒരു പ്രോഗ്രാമിലെ മറ്റ് ജോലികൾക്കായി ഒരിക്കലും ഉപയോഗിക്കരുത്. മാട്രിക്സ് GPIO-കളുടെ ഇരട്ട അസൈൻമെൻ്റ് തകരാറുകളിലേക്കോ പരിശീലന ബോർഡിന് കേടുപാടുകളിലേക്കോ നയിക്കും!
4.9 LC-ഡിസ്പ്ലേ (LCD)
ചിത്രം 1 ൻ്റെ മുകളിൽ വലതുഭാഗത്ത് ടെക്സ്റ്റ് അല്ലെങ്കിൽ സംഖ്യാ മൂല്യങ്ങൾ പ്രദർശിപ്പിക്കുന്നതിനുള്ള LC ഡിസ്പ്ലേ (LCD) ആണ് (ചിത്രം 18 ലെ അമ്പടയാളം (1). എൽസിഡിക്ക് രണ്ട് വരികളുണ്ട്; ഓരോ വരിയിലും 16 പ്രതീകങ്ങൾ പ്രദർശിപ്പിക്കാൻ കഴിയും. അതിൻ്റെ സർക്യൂട്ട് ചിത്രം 12 ൽ കാണിച്ചിരിക്കുന്നു.
നിർമ്മാതാവിനെ ആശ്രയിച്ച് LC ഡിസ്പ്ലേയുടെ രൂപകൽപ്പന വ്യത്യാസപ്പെടാം, ഉദാ, നീല പശ്ചാത്തലത്തിൽ വെളുത്ത പ്രതീകങ്ങൾ അല്ലെങ്കിൽ മഞ്ഞ പശ്ചാത്തലത്തിൽ കറുത്ത പ്രതീകങ്ങൾ അല്ലെങ്കിൽ മറ്റൊരു രൂപം സാധ്യമാണ്.
എല്ലാ പ്രോഗ്രാമുകളിലും LCD ആവശ്യമില്ലാത്തതിനാൽ, +5 V ഓപ്പറേറ്റിംഗ് വോളിയംtagLCD-യുടെ ബാക്ക്ലൈറ്റ് തടസ്സപ്പെടുത്തുകയാണെങ്കിൽ, പിൻ ഹെഡർ JP5-ൽ ജമ്പർ വലിച്ചുകൊണ്ട് LCD-യുടെ e തടസ്സപ്പെടുത്താം.
 ചിത്രം 12: LC ഡിസ്പ്ലേയുടെ കണക്ഷനുകൾ
ചിത്രം 12: LC ഡിസ്പ്ലേയുടെ കണക്ഷനുകൾ
കോൺട്രാസ്റ്റ് ക്രമീകരണം
![]() MCCAB ട്രെയിനിംഗ് ബോർഡ് വാങ്ങുന്നയാൾ ആദ്യ സ്റ്റാർട്ട്-അപ്പ് സമയത്ത് LC ഡിസ്പ്ലേയുടെ ദൃശ്യതീവ്രത ക്രമീകരിക്കണം! ഇത് ചെയ്യുന്നതിന്, എൽസിഡിയിലേക്ക് ഒരു ടെക്സ്റ്റ് ഔട്ട്പുട്ട് ചെയ്യുകയും, പരിശീലന ബോർഡിൻ്റെ അടിയിൽ നിന്ന് ഒരു സ്ക്രൂഡ്രൈവർ ഉപയോഗിച്ച് ചിത്രം 13 (ചിത്രം 13 ലെ വെളുത്ത അമ്പടയാളം) കാണിച്ചിരിക്കുന്ന ട്രിമ്മിംഗ് റെസിസ്റ്റർ മാറ്റുന്നതിലൂടെ ദൃശ്യതീവ്രത ക്രമീകരിക്കുകയും ചെയ്യുന്നു, അങ്ങനെ ഡിസ്പ്ലേയിലെ പ്രതീകങ്ങൾ ഒപ്റ്റിമൽ ആയി കാണിക്കുന്നു.
MCCAB ട്രെയിനിംഗ് ബോർഡ് വാങ്ങുന്നയാൾ ആദ്യ സ്റ്റാർട്ട്-അപ്പ് സമയത്ത് LC ഡിസ്പ്ലേയുടെ ദൃശ്യതീവ്രത ക്രമീകരിക്കണം! ഇത് ചെയ്യുന്നതിന്, എൽസിഡിയിലേക്ക് ഒരു ടെക്സ്റ്റ് ഔട്ട്പുട്ട് ചെയ്യുകയും, പരിശീലന ബോർഡിൻ്റെ അടിയിൽ നിന്ന് ഒരു സ്ക്രൂഡ്രൈവർ ഉപയോഗിച്ച് ചിത്രം 13 (ചിത്രം 13 ലെ വെളുത്ത അമ്പടയാളം) കാണിച്ചിരിക്കുന്ന ട്രിമ്മിംഗ് റെസിസ്റ്റർ മാറ്റുന്നതിലൂടെ ദൃശ്യതീവ്രത ക്രമീകരിക്കുകയും ചെയ്യുന്നു, അങ്ങനെ ഡിസ്പ്ലേയിലെ പ്രതീകങ്ങൾ ഒപ്റ്റിമൽ ആയി കാണിക്കുന്നു.
താപനിലയിലെ ഏറ്റക്കുറച്ചിലുകൾ അല്ലെങ്കിൽ പ്രായമാകൽ കാരണം ഒരു പുനഃക്രമീകരണം ആവശ്യമാണെങ്കിൽ, ആവശ്യമെങ്കിൽ ഈ ട്രിമ്മിംഗ് റെസിസ്റ്റർ ക്രമീകരിച്ചുകൊണ്ട് ഉപയോക്താവിന് എൽസിഡി ദൃശ്യതീവ്രത ശരിയാക്കാനാകും.
 ചിത്രം 13: ഒരു സ്ക്രൂഡ്രൈവർ ഉപയോഗിച്ച് LCD കോൺട്രാസ്റ്റിൻ്റെ ക്രമീകരണം
ചിത്രം 13: ഒരു സ്ക്രൂഡ്രൈവർ ഉപയോഗിച്ച് LCD കോൺട്രാസ്റ്റിൻ്റെ ക്രമീകരണം
LC-ഡിസ്പ്ലേയിലേക്കുള്ള ഡാറ്റയുടെ കൈമാറ്റം
ATmega2P എന്ന മൈക്രോകൺട്രോളറിൻ്റെ സീരിയൽ TWI (=I328 C) ഇൻ്റർഫേസ് വഴിയാണ് LC-ഡിസ്പ്ലേ നിയന്ത്രിക്കുന്നത്. പിൻ ഹെഡർ SV4-ലെ കണക്റ്റർ A6 (ചിത്രം 7-ലെ അമ്പടയാളം (1)) ഡാറ്റാ ലൈൻ SDA (സീരിയൽ DAta) ആയും A5 ക്ലോക്ക് ലൈൻ SCL ആയും (സീരിയൽ ക്ലോക്ക്) പ്രവർത്തിക്കുന്നു.
![]() MCCAB ട്രെയിനിംഗ് ബോർഡിലെ LC ഡിസ്പ്ലേയ്ക്ക് സാധാരണയായി I2 C വിലാസം 0x27 ആണ്.
MCCAB ട്രെയിനിംഗ് ബോർഡിലെ LC ഡിസ്പ്ലേയ്ക്ക് സാധാരണയായി I2 C വിലാസം 0x27 ആണ്.
നിർമ്മാണ കാരണങ്ങളാൽ മറ്റൊരു വിലാസം ഉപയോഗിക്കേണ്ടതുണ്ടെങ്കിൽ, ഈ വിലാസം ഡിസ്പ്ലേയിലെ ഒരു സ്റ്റിക്കർ ഉപയോഗിച്ച് സൂചിപ്പിച്ചിരിക്കുന്നു. ഉപയോക്താവിൻ്റെ സ്കെച്ചിൽ, 0x27 എന്ന വിലാസത്തിന് പകരം ഈ വിലാസം ഉപയോഗിക്കേണ്ടതാണ്.
LC ഡിസ്പ്ലേയിൽ ഇൻസ്റ്റാൾ ചെയ്തിരിക്കുന്ന കൺട്രോളർ, വ്യാപകമായി ഉപയോഗിക്കുന്ന വ്യാവസായിക നിലവാരം HD44780 ന് അനുയോജ്യമാണ്, ഇതിനായി ധാരാളം Arduino ലൈബ്രറികൾ ഉണ്ട് (ഉദാ. https://github.com/marcoschwartz/LiquidCrystal_I2C) വഴി നിയന്ത്രണത്തിനായി ഇൻ്റർനെറ്റിൽ
IC2 ബസ്. ലൈബ്രറികൾ സാധാരണയായി അതത് സ്ഥാപനങ്ങളിൽ നിന്ന് സൗജന്യമായി ഡൗൺലോഡ് ചെയ്യാവുന്നതാണ് webസൈറ്റ്.
4.10 ഉയർന്ന ഔട്ട്പുട്ട് കറൻ്റുകൾക്കും വോളിയത്തിനും വേണ്ടി ഡ്രൈവർ SV1, SV7 എന്നിവ ഔട്ട്പുട്ട് ചെയ്യുന്നുtages
ഏകദേശം ഉയർന്ന വൈദ്യുതധാരകൾ ആവശ്യമുള്ള ലോഡുകൾ ഓണാക്കാനും ഓഫാക്കാനും പിൻ ഹെഡറുകൾ SV1 (ചിത്രം 24 ലെ അമ്പടയാളം (1)), SV7 (ചിത്രം 17 ലെ അമ്പടയാളം (1) എന്നിവ ഉപയോഗിക്കാം. ഒരു സാധാരണ മൈക്രോകൺട്രോളർ ഔട്ട്പുട്ടിന് പരമാവധി നൽകാൻ കഴിയുന്ന 40 mA. പ്രവർത്തന വോള്യംtagബാഹ്യ ലോഡിൻ്റെ e +24 V വരെയും ഔട്ട്പുട്ട് കറൻ്റ് 160 mA വരെയും ആകാം. പരിശീലന ബോർഡിൻ്റെ മൈക്രോകൺട്രോളർ ഉപയോഗിച്ച് നേരിട്ട് ചെറിയ മോട്ടോറുകൾ (ഉദാ, ഫാൻ മോട്ടോറുകൾ), റിലേകൾ അല്ലെങ്കിൽ ചെറിയ ബൾബുകൾ നിയന്ത്രിക്കുന്നത് ഇത് സാധ്യമാക്കുന്നു.
രണ്ട് ഡ്രൈവർ ഔട്ട്പുട്ടുകളുടെ സർക്യൂട്ട് ഡയഗ്രം ചിത്രം 14 കാണിക്കുന്നു.
ചിത്രം 14: ഉയർന്ന ഔട്ട്പുട്ട് പ്രവാഹങ്ങൾക്കായി ഡ്രൈവർ SV1, SV7 എന്നിവ ഔട്ട്പുട്ട് ചെയ്യുന്നു
ചിത്രം 14-ലെ ഡാഷ് ചെയ്ത ഏരിയകൾ, എക്സ് ഉപയോഗിച്ച് ഡ്രൈവർ ഔട്ട്പുട്ടിലേക്ക് ലോഡ് എങ്ങനെ ബന്ധിപ്പിച്ചിരിക്കുന്നു എന്ന് കാണിക്കുന്നുampഒരു റിലേയും മോട്ടോറും:
- ബാഹ്യ പ്രവർത്തന വോളിയത്തിൻ്റെ പോസിറ്റീവ് പോൾtagഹെഡർ SV3 റെസ്പിൻ്റെ പിൻ 1 (ബോർഡിൽ “+” എന്ന് ലേബൽ ചെയ്തിരിക്കുന്നു) ലേക്ക് e ബന്ധിപ്പിച്ചിരിക്കുന്നു. SV7. ലോഡിൻ്റെ കൂടുതൽ പോസിറ്റീവ് കണക്ഷൻ പിൻ ഹെഡർ SV3 അല്ലെങ്കിൽ SV1 ൻ്റെ പിൻ 7 ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
- ലോഡിൻ്റെ കൂടുതൽ നെഗറ്റീവ് കണക്ഷൻ ഹെഡർ SV2 റെസ്പിൻ്റെ പിൻ 1-ലേക്ക് (ബോർഡിൽ "എസ്" എന്ന് ലേബൽ ചെയ്തിരിക്കുന്നു) ബന്ധിപ്പിച്ചിരിക്കുന്നു. SV7.
- ബാഹ്യ പ്രവർത്തന വോള്യത്തിൻ്റെ നെഗറ്റീവ് പോൾtagഹെഡർ SV1 റെസ്പിൻ്റെ പിൻ 1-ലേക്ക് (ബോർഡിൽ "" എന്ന് ലേബൽ ചെയ്തിരിക്കുന്നു) e ബന്ധിപ്പിച്ചിരിക്കുന്നു. SV7.
ഡ്രൈവർ എസ്tage SV1, മൈക്രോകൺട്രോളറിൻ്റെ GPIO D3, ഡ്രൈവർ എന്നിവയുമായി ശാശ്വതമായി ബന്ധിപ്പിച്ചിരിക്കുന്നുtage SV7 മൈക്രോകൺട്രോളറിൻ്റെ GPIO D10-ലേക്ക് ശാശ്വതമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. D3, D10 എന്നിവ മൈക്രോകൺട്രോളറിൻ്റെ PWM-കഴിവുള്ള ഔട്ട്പുട്ടുകൾ ആയതിനാൽ, എളുപ്പത്തിൽ നിയന്ത്രിക്കാൻ സാധിക്കും, ഉദാഹരണത്തിന്ample, ബന്ധിപ്പിച്ച DC മോട്ടോറിൻ്റെ വേഗത അല്ലെങ്കിൽ ഒരു ലൈറ്റ് ബൾബിൻ്റെ തെളിച്ചം. സംരക്ഷിത ഡയോഡുകൾ D1, D8 എന്നിവ ആ വോള്യം ഉറപ്പാക്കുന്നുtagഇൻഡക്റ്റീവ് ലോഡുകൾ സ്വിച്ച് ഓഫ് ചെയ്യുമ്പോൾ ഉണ്ടാകുന്ന e കൊടുമുടികൾ, ഔട്ട്പുട്ട് s-ന് കേടുവരുത്താൻ കഴിയില്ലtage.
മൈക്രോകൺട്രോളറിൻ്റെ ഔട്ട്പുട്ട് D3-ലെ ഉയർന്ന സിഗ്നൽ ട്രാൻസിസ്റ്റർ T2-ൽ മാറുന്നു, കൂടാതെ SV1-ലെ ലോഡിൻ്റെ കൂടുതൽ നെഗറ്റീവ് കണക്ഷൻ ട്രാൻസിസ്റ്റർ T2 സ്വിച്ചിംഗ് വഴി ഗ്രൗണ്ടിലേക്ക് (GND) ബന്ധിപ്പിച്ചിരിക്കുന്നു. അങ്ങനെ, ലോഡ് സ്വിച്ച് ഓണാണ്, കാരണം മുഴുവൻ ബാഹ്യ പ്രവർത്തന വോള്യവുംtagഇ ഇപ്പോൾ അതിൽ വീഴുന്നു.
D3-ലെ ഒരു കുറഞ്ഞ സിഗ്നൽ ട്രാൻസിസ്റ്റർ T2-നെ തടയുന്നു, SV1-ലേക്ക് കണക്റ്റ് ചെയ്തിരിക്കുന്ന ലോഡ് സ്വിച്ച് ഓഫ് ചെയ്യുന്നു. മൈക്രോകൺട്രോളറിൻ്റെ ഔട്ട്പുട്ട് D10, ഹെഡർ SV7 എന്നിവയ്ക്കും ഇത് ബാധകമാണ്.
4.11 ബാഹ്യ മൊഡ്യൂളുകൾ ലിങ്ക് ചെയ്യുന്നതിനുള്ള SV2 സോക്കറ്റ് കണക്റ്റർ
സോക്കറ്റ് കണക്ടർ SV2 വഴി (ചിത്രം 26 ലെ അമ്പടയാളം (1)) ബാഹ്യ മൊഡ്യൂളുകളും പ്രിൻ്റഡ് സർക്യൂട്ട് ബോർഡുകളും MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്ക് ഡോക്ക് ചെയ്യാവുന്നതാണ്. ഈ മൊഡ്യൂളുകൾ സെൻസർ ബോർഡുകൾ, ഡിജിറ്റൽ/അനലോഗ് കൺവെർട്ടറുകൾ, WLAN അല്ലെങ്കിൽ റേഡിയോ മൊഡ്യൂളുകൾ, ഗ്രാഫിക് ഡിസ്പ്ലേകൾ അല്ലെങ്കിൽ ഇൻപുട്ട്/ഔട്ട്പുട്ട് ലൈനുകളുടെ എണ്ണം വർദ്ധിപ്പിക്കുന്നതിനുള്ള സർക്യൂട്ടുകൾ എന്നിവ ആകാം, നിരവധി ഓപ്ഷനുകളിൽ ചിലത് മാത്രം. കൺട്രോൾ എഞ്ചിനീയറിംഗിനായുള്ള പരിശീലന മൊഡ്യൂളുകൾ അല്ലെങ്കിൽ ട്രാഫിക് ലൈറ്റ് കൺട്രോൾ എന്നിവ പോലുള്ള പൂർണ്ണമായ ആപ്ലിക്കേഷൻ മോഡലുകൾ പോലും, അവയുടെ നിയന്ത്രണത്തിന് നിരവധി GPIO-കൾ ആവശ്യമാണ്, MCCAB ട്രെയിനിംഗ് ബോർഡിൻ്റെ SV2 സോക്കറ്റ് കണക്റ്ററുമായി ബന്ധിപ്പിക്കുകയും അതിൻ്റെ മൈക്രോകൺട്രോളർ നിയന്ത്രിക്കുകയും ചെയ്യാം. സ്ത്രീ കണക്ടർ സ്ട്രിപ്പ് SV2-ൽ 26 കോൺടാക്റ്റുകൾ അടങ്ങിയിരിക്കുന്നു, അവ 2 കോൺടാക്റ്റുകൾ വീതമുള്ള 13 വരികളായി ക്രമീകരിച്ചിരിക്കുന്നു. ഒറ്റ-സംഖ്യയുള്ള കോൺടാക്റ്റുകൾ മുകളിലെ വരിയിലും ഇരട്ട-സംഖ്യയുള്ള കോൺടാക്റ്റുകൾ SV2 സോക്കറ്റ് സ്ട്രിപ്പിൻ്റെ താഴത്തെ വരിയിലുമാണ്.
 ചിത്രം 15: സോക്കറ്റ് കണക്റ്റർ SV2-ൻ്റെ പിൻ അസൈൻമെൻ്റ്
ചിത്രം 15: സോക്കറ്റ് കണക്റ്റർ SV2-ൻ്റെ പിൻ അസൈൻമെൻ്റ്
SV2-ൻ്റെ പിൻ അസൈൻമെൻ്റ് ചിത്രം 15 കാണിക്കുന്നു. MCCAB ട്രെയിനിംഗ് ബോർഡിലെ ഒരു ബാഹ്യ മൊഡ്യൂളിന് പ്രസക്തമായ എല്ലാ കണക്ഷനുകളും സോക്കറ്റ് സ്ട്രിപ്പ് SV2-ലേക്ക് നയിക്കുന്നു.
GPIO-കൾ D0, D1 (RxD, TxD), അനലോഗ് ഇൻപുട്ടുകൾ A6, A7 എന്നിവ SV2-ലേക്ക് കണക്റ്റ് ചെയ്തിട്ടില്ല, കാരണം D0, D1 എന്നിവ MCCAB ട്രെയിനിംഗ് ബോർഡും PC-യും തമ്മിലുള്ള സീരിയൽ കണക്ഷനുവേണ്ടി റിസർവ് ചെയ്തിരിക്കുന്നതിനാൽ ഒരു ഉപയോക്താവിന് മാത്രമേ ലഭ്യമാകൂ. വളരെ പരിമിതമായ വഴി (വിഭാഗം 4.1 ലെ കുറിപ്പുകൾ കാണുക) കൂടാതെ A6, A7 എന്നിവ MCCAB ട്രെയിനിംഗ് ബോർഡിലെ P1, P2 എന്നീ പൊട്ടൻഷിയോമീറ്ററുകളുടെ വൈപ്പർ ടെർമിനലുകളുമായി ശാശ്വതമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു (വിഭാഗം 4.3 കാണുക) അതിനാൽ മറ്റുവിധത്തിൽ ഉപയോഗിക്കാൻ കഴിയില്ല.
![]() അവൻ്റെ പ്രോഗ്രാമിൽ, ഉപയോക്താവ് ആർഡ്വിനോ നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഓരോ GPIO-ഉം SV5, SV6 (ചിത്രം 3-ലെ അമ്പടയാളം (7), അമ്പടയാളം (1) എന്നീ രണ്ട് പിൻ ഹെഡറുകളിൽ കോൺഫിഗർ ചെയ്യണം, ഇത് SV2-ൽ ഒരു ബാഹ്യ ഘടകം ഉപയോഗിക്കുന്നു. ആവശ്യമായ ഡാറ്റ ദിശയ്ക്കായി ഇൻപുട്ട് അല്ലെങ്കിൽ ഔട്ട്പുട്ട് (വിഭാഗം 4.1 കാണുക)! ®
അവൻ്റെ പ്രോഗ്രാമിൽ, ഉപയോക്താവ് ആർഡ്വിനോ നാനോ മൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഓരോ GPIO-ഉം SV5, SV6 (ചിത്രം 3-ലെ അമ്പടയാളം (7), അമ്പടയാളം (1) എന്നീ രണ്ട് പിൻ ഹെഡറുകളിൽ കോൺഫിഗർ ചെയ്യണം, ഇത് SV2-ൽ ഒരു ബാഹ്യ ഘടകം ഉപയോഗിക്കുന്നു. ആവശ്യമായ ഡാറ്റ ദിശയ്ക്കായി ഇൻപുട്ട് അല്ലെങ്കിൽ ഔട്ട്പുട്ട് (വിഭാഗം 4.1 കാണുക)! ®
![]() ജാഗ്രത: MCCAB ട്രെയിനിംഗ് ബോർഡിലെ മൈക്രോകൺട്രോളർ ATmega328P-യുടെ GPIO-കൾ SV2-ലേക്ക് കണക്റ്റുചെയ്തിരിക്കുന്ന ഒരു മൊഡ്യൂൾ ഉപയോഗിക്കുന്നു, ഒരു പ്രോഗ്രാമിലെ മറ്റ് ജോലികൾക്കായി ഉപയോഗിക്കരുത്. ഈ GPIO-കളുടെ ഇരട്ട നിയമനം, പരിശീലന ബോർഡിൻ്റെ തകരാറുകളിലേക്കോ കേടുപാടുകളിലേക്കോ നയിക്കും!
ജാഗ്രത: MCCAB ട്രെയിനിംഗ് ബോർഡിലെ മൈക്രോകൺട്രോളർ ATmega328P-യുടെ GPIO-കൾ SV2-ലേക്ക് കണക്റ്റുചെയ്തിരിക്കുന്ന ഒരു മൊഡ്യൂൾ ഉപയോഗിക്കുന്നു, ഒരു പ്രോഗ്രാമിലെ മറ്റ് ജോലികൾക്കായി ഉപയോഗിക്കരുത്. ഈ GPIO-കളുടെ ഇരട്ട നിയമനം, പരിശീലന ബോർഡിൻ്റെ തകരാറുകളിലേക്കോ കേടുപാടുകളിലേക്കോ നയിക്കും!
4.12 SPI മൊഡ്യൂളുകളുടെ കണക്ഷനുള്ള പിൻ തലക്കെട്ടുകൾ
SPI ഇൻ്റർഫേസ് ഉള്ള (SPI = സീരിയൽ പെരിഫറൽ) ബാഹ്യ സ്ലേവ് മൊഡ്യൂളുകളുമായി MCCAB ട്രെയിനിംഗ് ബോർഡിനെ SPI മാസ്റ്ററായി ബന്ധിപ്പിക്കുന്നതിന് SV11 (ചിത്രം 13 ലെ അമ്പടയാളം (1)), SV12 (ചിത്രം 12 ലെ അമ്പടയാളം (1)) എന്നീ പിൻ തലക്കെട്ടുകൾ ഉപയോഗിക്കാം. ഇൻ്റർഫേസ്). സീരിയൽ പെരിഫറൽ ഇൻ്റർഫേസ് പരിശീലന ബോർഡിനും പെരിഫറൽ മൊഡ്യൂളിനും ഇടയിൽ വേഗത്തിലുള്ള സിൻക്രണസ് ഡാറ്റ കൈമാറ്റം അനുവദിക്കുന്നു.
AVR മൈക്രോകൺട്രോളർ ATmega328P-യുടെ ചിപ്പിൽ ഒരു ഹാർഡ്വെയർ SPI ഉണ്ട്, അതിൻ്റെ സിഗ്നലുകൾ SS, MOSI, MISO, SCLK എന്നിവ മൈക്രോകൺട്രോളർ ചിപ്പിനുള്ളിൽ GPIOs D10 … D13 എന്ന പിൻ ഹെഡറുകളിൽ SV5, SV6 (അമ്പ് (3), അമ്പടയാളം (7) എന്നിവയുമായി ബന്ധിപ്പിക്കാൻ കഴിയും. ) ചിത്രം 1 ൽ).
Arduino IDE-ൽ, SPI മൊഡ്യൂളുകളുടെ നിയന്ത്രണത്തിനായി SPI ലൈബ്രറി ലഭ്യമാണ്, അത് #include ഉപയോഗിച്ച് ഉപയോക്തൃ പ്രോഗ്രാമിലേക്ക് സംയോജിപ്പിച്ചിരിക്കുന്നു.
 ചിത്രം 16: SPI കണക്റ്റർ SV11-ൻ്റെ പിൻ അസൈൻമെൻ്റ്
ചിത്രം 16: SPI കണക്റ്റർ SV11-ൻ്റെ പിൻ അസൈൻമെൻ്റ്
ഓപ്പറേറ്റിംഗ് വോളിയം ഉള്ള SPI മൊഡ്യൂളുകൾ മുതൽtage +3.3 V കൂടാതെ ഓപ്പറേറ്റിംഗ് വോളിയം ഉള്ള SPI മൊഡ്യൂളുകളുംtage +5 V സാധാരണമാണ്, MCCAB ട്രെയിനിംഗ് ബോർഡ് SV11, SV12 എന്നിവയ്ക്കൊപ്പം രണ്ട് ഓപ്ഷനുകളും ഉൾക്കൊള്ളുന്നതിനായി രണ്ട് വയർഡ് കണക്ഷൻ സ്ട്രിപ്പുകൾ വാഗ്ദാനം ചെയ്യുന്നു.
![]() ഒരു ജമ്പർ ഷോർട്ട്സ് പിൻസ് 2, 3 ഹെഡർ JP4 (മുകളിലുള്ള ചിത്രം 17 കാണുക), SPI ഇൻ്റർഫേസുകൾ SV11 ഉം SV12 ഉം മൈക്രോകൺട്രോളറിൻ്റെ അതേ ഔട്ട്പുട്ട് പിൻ D10 ആണ് SS (സ്ലേവ് സെലക്ട്) ലൈനായി ഉപയോഗിക്കുന്നത്, ചിത്രം 16 ഉം ചിത്രം 17 ഉം കാണിക്കുന്നു! അതിനാൽ, SV11 അല്ലെങ്കിൽ SV12 എന്ന രണ്ട് കണക്റ്ററുകളിൽ ഒന്ന് മാത്രമേ ഒരേ സമയം ഒരു SPI മൊഡ്യൂളിലേക്ക് കണക്റ്റുചെയ്തിരിക്കൂ, കാരണം ഒരേ SS ലൈൻ വ്യത്യസ്ത ഉപകരണങ്ങൾക്കായി ഒരേസമയം ഉപയോഗിക്കുന്നത് SPI ലൈനുകളിൽ ട്രാൻസ്മിഷൻ പിശകുകളിലേക്കും ഷോർട്ട് സർക്യൂട്ടുകളിലേക്കും നയിക്കും! എന്നിരുന്നാലും രണ്ട് SPI സ്ലേവുകളെ SV4.12.3, SV11 എന്നിവയിലേക്ക് ഒരേ സമയം എങ്ങനെ ബന്ധിപ്പിക്കാൻ കഴിയുമെന്ന് വിഭാഗം 12 കാണിക്കുന്നു.
ഒരു ജമ്പർ ഷോർട്ട്സ് പിൻസ് 2, 3 ഹെഡർ JP4 (മുകളിലുള്ള ചിത്രം 17 കാണുക), SPI ഇൻ്റർഫേസുകൾ SV11 ഉം SV12 ഉം മൈക്രോകൺട്രോളറിൻ്റെ അതേ ഔട്ട്പുട്ട് പിൻ D10 ആണ് SS (സ്ലേവ് സെലക്ട്) ലൈനായി ഉപയോഗിക്കുന്നത്, ചിത്രം 16 ഉം ചിത്രം 17 ഉം കാണിക്കുന്നു! അതിനാൽ, SV11 അല്ലെങ്കിൽ SV12 എന്ന രണ്ട് കണക്റ്ററുകളിൽ ഒന്ന് മാത്രമേ ഒരേ സമയം ഒരു SPI മൊഡ്യൂളിലേക്ക് കണക്റ്റുചെയ്തിരിക്കൂ, കാരണം ഒരേ SS ലൈൻ വ്യത്യസ്ത ഉപകരണങ്ങൾക്കായി ഒരേസമയം ഉപയോഗിക്കുന്നത് SPI ലൈനുകളിൽ ട്രാൻസ്മിഷൻ പിശകുകളിലേക്കും ഷോർട്ട് സർക്യൂട്ടുകളിലേക്കും നയിക്കും! എന്നിരുന്നാലും രണ്ട് SPI സ്ലേവുകളെ SV4.12.3, SV11 എന്നിവയിലേക്ക് ഒരേ സമയം എങ്ങനെ ബന്ധിപ്പിക്കാൻ കഴിയുമെന്ന് വിഭാഗം 12 കാണിക്കുന്നു.
4.12.1 +11 V ഓപ്പറേറ്റിംഗ് വോള്യമുള്ള SPI മൊഡ്യൂളുകൾക്കുള്ള ഇൻ്റർഫേസ് SV3.3tage
കണക്ടർ SV11 (ചിത്രം 13 ലെ അമ്പടയാളം (1)) MCCAB ട്രെയിനിംഗ് ബോർഡിനും +3.3 V ഓപ്പറേറ്റിംഗ് വോള്യമുള്ള ഒരു ബാഹ്യ SPI മൊഡ്യൂളിനും ഇടയിൽ ഒരു സീരിയൽ SPI കണക്ഷൻ (SPI = സീരിയൽ പെരിഫറൽ ഇൻ്റർഫേസ്) സ്ഥാപിക്കാൻ ഉപയോക്താവിനെ പ്രാപ്തമാക്കുന്നു.tage, കാരണം SV11 ഇൻ്റർഫേസിലെ SPI ഔട്ട്പുട്ട് സിഗ്നലുകളുടെ SS, MOSI, SCLK എന്നിവയുടെ ലെവലുകൾ വോളിയം അനുസരിച്ച് 3.3 V ആയി കുറയുന്നു.tagഇ ഡിവൈഡറുകൾ. SPI ഇൻപുട്ട് ലൈനിലെ MISO-യിലെ ഒരു 3.3 V ലെവൽ AVR മൈക്രോകൺട്രോളർ ATmega328P-ൽ നിന്ന് ഉയർന്ന സിഗ്നലായി അംഗീകരിക്കപ്പെട്ടിരിക്കുന്നു, അതിനാൽ 5 V ലെവലിലേക്ക് ഉയർത്തേണ്ടതില്ല. SV11 ൻ്റെ വയറിംഗ് ചിത്രം 16 ൽ കാണിച്ചിരിക്കുന്നു.
4.12.2 +12 V ഓപ്പറേറ്റിംഗ് വോള്യമുള്ള SPI മൊഡ്യൂളുകൾക്കുള്ള ഇൻ്റർഫേസ് SV5tage
ഇൻ്റർഫേസ് SV12 (ചിത്രം 12-ലെ അമ്പടയാളം (1)) MCCAB ട്രെയിനിംഗ് ബോർഡിനും +5 V ഓപ്പറേറ്റിംഗ് വോള്യമുള്ള ഒരു ബാഹ്യ SPI സ്ലേവിനുമിടയിൽ ഒരു സീരിയൽ SPI കണക്ഷൻ സ്ഥാപിക്കാൻ ഉപയോക്താവിനെ പ്രാപ്തമാക്കുന്നു.tage, കാരണം ഇൻ്റർഫേസ് SV12-ൻ്റെ SS, MOSI, MISO, SCLK എന്നീ സിഗ്നലുകൾ 5 V സിഗ്നൽ ലെവലിൽ പ്രവർത്തിക്കുന്നു.
SV12 ൻ്റെ വയറിംഗ് ചിത്രം 17 ൽ കാണിച്ചിരിക്കുന്നു. 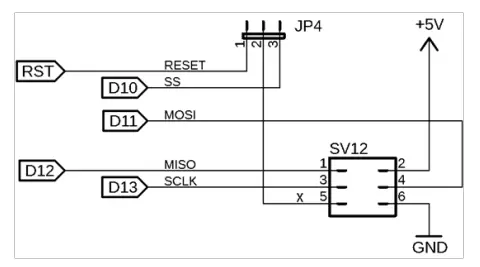
ചിത്രം 17: SPI കണക്റ്റർ SV12-ൻ്റെ പിൻ അസൈൻമെൻ്റ്
പിൻ ഹെഡർ SV12-ലെ പിൻ ക്രമീകരണം, AVR നിർമ്മാതാക്കളായ Microchip-ൻ്റെ AVR പ്രോഗ്രാമിംഗ് ഇൻ്റർഫേസിൻ്റെ ശുപാർശ ചെയ്ത പിൻ അസൈൻമെൻ്റുമായി പൊരുത്തപ്പെടുന്നു, അത് ചിത്രം 18-ൽ കാണിച്ചിരിക്കുന്നു. ഇത് ഉപയോക്താവിന് ATmega328P-യുടെ ബൂട്ട്ലോഡർ അനുയോജ്യമായ ഒരു പ്രോഗ്രാമിംഗ് ഉപകരണം ഉപയോഗിച്ച് റീപ്രോഗ്രാം ചെയ്യാനുള്ള അവസരം നൽകുന്നു. എസ്പിഐ ഇൻ്റർഫേസ്, ഉദാ, ഒരു പുതിയ പതിപ്പിലേക്ക് ഒരു അപ്ഡേറ്റ് ആവശ്യമുണ്ടെങ്കിൽ അല്ലെങ്കിൽ അബദ്ധത്തിൽ ഇല്ലാതാക്കിയിട്ടുണ്ടെങ്കിൽ.
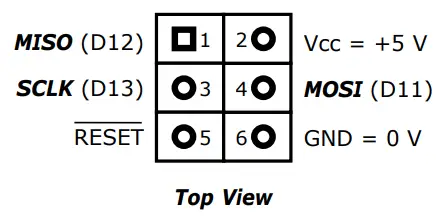 ചിത്രം 18: AVR പ്രോഗ്രാമിംഗ് ഇൻ്റർഫേസിൻ്റെ പിൻ അസൈൻമെൻ്റ് ശുപാർശ ചെയ്യുന്നു
ചിത്രം 18: AVR പ്രോഗ്രാമിംഗ് ഇൻ്റർഫേസിൻ്റെ പിൻ അസൈൻമെൻ്റ് ശുപാർശ ചെയ്യുന്നു
SV5-ൻ്റെ പിൻ 12-ൽ സിഗ്നൽ X-ൻ്റെ തിരഞ്ഞെടുപ്പ്
ആവശ്യമുള്ള ആപ്ലിക്കേഷനെ ആശ്രയിച്ച്, SV5 (ചിത്രം 12) ൻ്റെ പിൻ 17 ലെ കണക്ഷൻ X വ്യത്യസ്ത സിഗ്നലുകൾ ഉപയോഗിച്ച് നൽകാം:
- ഒരു ജമ്പർ പിൻ ഹെഡർ JP2-ൻ്റെ പിന്നുകൾ 3, 4 എന്നിവ ബന്ധിപ്പിക്കുന്നു.
പിൻ ഹെഡർ JP2 ൻ്റെ 3, 4 പിൻസ് (മുകളിലുള്ള ചിത്രം 17, ചിത്രം 11 ലെ അമ്പടയാളം (1) എന്നിവ കാണുക) ഒരു ജമ്പർ ഉപയോഗിച്ച് ഷോർട്ട് ചെയ്താൽ, മൈക്രോകൺട്രോളറിൻ്റെ GPIO D10 (സിഗ്നൽ SS) കണക്ടർ SV5-ൻ്റെ പിൻ 12-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു. SS (സ്ലേവ് സെലക്ട്) GPIO D12-നൊപ്പം ഒരു സാധാരണ SPI ഇൻ്റർഫേസായി SV10 ഉപയോഗിക്കുന്നു.
ഈ സാഹചര്യത്തിൽ, SPI ഇൻ്റർഫേസുകളായ SV11 ഉം SV12 ഉം ഒരേ SS ലൈൻ D10 ഉപയോഗിക്കുന്നു! അതിനാൽ, SV11 അല്ലെങ്കിൽ SV12 എന്ന രണ്ട് കണക്ടർ സ്ട്രിപ്പുകളിൽ ഒരെണ്ണം മാത്രമേ ഒരു SPI മൊഡ്യൂളിലേക്ക് കണക്റ്റ് ചെയ്തിട്ടുള്ളൂ, കാരണം ഒരേ SS ലൈനിൻ്റെ ഒരേസമയം വിവിധ ഉപകരണങ്ങൾ ഉപയോഗിക്കുന്നത് ട്രാൻസ്മിഷൻ പിശകുകളിലേക്കും SPI ലൈനുകളിൽ ഷോർട്ട് സർക്യൂട്ടിലേക്കും നയിക്കും! - ഒരു ജമ്പർ പിൻ ഹെഡർ JP1-ൻ്റെ പിന്നുകൾ 2, 4 എന്നിവ ബന്ധിപ്പിക്കുന്നു. ഈ സാഹചര്യത്തിൽ, മൈക്രോകൺട്രോളറിൻ്റെ റീസെറ്റ് ലൈൻ പിൻ ഹെഡർ SV5 ൻ്റെ പിൻ 12-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഈ മോഡിൽ SV12 മൈക്രോകൺട്രോളർ ATmega328P-യുടെ ഒരു പ്രോഗ്രാമിംഗ് ഇൻ്റർഫേസായി പ്രവർത്തിക്കുന്നു, കാരണം പ്രോഗ്രാമിംഗ് പ്രക്രിയയ്ക്കായി ATmega328P യുടെ റീസെറ്റ് ലൈൻ പിൻ ഹെഡർ SV5-ൻ്റെ പിൻ X (പിൻ 12) ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കണം. ഈ മോഡിൽ, ATmega328P SPI അടിമയും ബാഹ്യ പ്രോഗ്രാമർ മാസ്റ്ററുമാണ്.
4.12.3 SV11, SV12 എന്നിവയിലേക്കുള്ള SPI മൊഡ്യൂളുകളുടെ ഒരേസമയം കണക്ഷൻ
MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്ക് ഒരേ സമയം 3.3 V മൊഡ്യൂളും 5 V മൊഡ്യൂളും ബന്ധിപ്പിക്കേണ്ട ആവശ്യമുണ്ടെങ്കിൽ, ചിത്രം 19 ൽ കാണിച്ചിരിക്കുന്ന വയറിംഗ് ഉപയോഗിച്ച് ഇത് മനസ്സിലാക്കാം. JP1 പിൻ ഹെഡറിൻ്റെ പിൻ 3 ഉം 4 ഉം ബന്ധിപ്പിച്ചിട്ടില്ല, JP2-ൻ്റെ പിൻ 4, ചിത്രം 2-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ, ഒരു ഡ്യൂപോണ്ട് കേബിൾ വഴി SV9 (ചിത്രം 5-ലെ അമ്പടയാളം (3)) പിൻ ഹെഡറിലെ D1... D19-ൽ ഡിജിറ്റൽ GPIO-കളിൽ ഒന്നിലേക്ക് കണക്റ്റ് ചെയ്തിരിക്കുന്നു. ATmega328P എന്ന മൈക്രോകൺട്രോളറിൻ്റെ ഈ ഔട്ട്പുട്ട് അതിൻ്റെ ചുമതല നിറവേറ്റുന്നു. പിൻ ഹെഡർ SV5-ൻ്റെ കണക്ടർ X-ൽ (പിൻ 12) ഒരു അധിക SS സിഗ്നൽ. ചിത്രം 19 മുൻ ഉപയോഗിച്ചുള്ള നടപടിക്രമം കാണിക്കുന്നുampഅധിക കണക്ടർ SS9 ആയി D2 ൻ്റെ le. 
ചിത്രം 19: MCCAB ട്രെയിനിംഗ് ബോർഡിലേക്കുള്ള രണ്ട് SPI മൊഡ്യൂളുകളുടെ ഒരേസമയം കണക്ഷൻ ഈ സാഹചര്യത്തിൽ, SPI ഇൻ്റർഫേസുകൾ SV11, SV12 എന്നിവ ഒരേ സമയം ബാഹ്യ SPI സ്ലേവുകളിലേക്ക് കണക്റ്റുചെയ്തേക്കാം, കാരണം SV11 ഉം SV12 ഉം ഇപ്പോൾ വ്യത്യസ്ത SS ലൈനുകൾ ഉപയോഗിക്കുന്നു: താഴ്ന്ന നില GPIO D10 SV11-ൽ SPI മൊഡ്യൂൾ സജീവമാക്കുന്നു, GPIO D9-ൽ LOW ലെവൽ SV12-ൽ SPI ഘടകം സജീവമാക്കുന്നു (ചിത്രം 19 കാണുക).
MCCAB ട്രെയിനിംഗ് ബോർഡിലെ മൈക്രോകൺട്രോളറിന് ഒരേ സമയം SV11 അല്ലെങ്കിൽ SV12 വഴി ബസുമായി ബന്ധിപ്പിച്ചിട്ടുള്ള ഒരു മൊഡ്യൂളുമായി മാത്രമേ ഡാറ്റ കൈമാറാൻ കഴിയൂ. ചിത്രം 19-ൽ നിങ്ങൾക്ക് കാണാനാകുന്നതുപോലെ, SV11, SV12 എന്നീ രണ്ട് ഇൻ്റർഫേസുകളുടെയും MISO ലൈനുകൾ ഒരുമിച്ച് ബന്ധിപ്പിച്ചിരിക്കുന്നു. രണ്ട് ഇൻ്റർഫേസുകളും അവയുടെ SS-കണക്ടറിൽ ലോ ലെവലിൽ ഒരേ സമയം സജീവമാക്കുകയും മൈക്രോകൺട്രോളറിലേക്ക് ഡാറ്റ കൈമാറുകയും ചെയ്താൽ, ട്രാൻസ്മിഷൻ പിശകുകളും SPI ലൈനുകളിലെ ഷോർട്ട് സർക്യൂട്ടുകളും ആയിരിക്കും ഫലം!
4.13 TWI (=I8C) ഇൻ്റർഫേസിനായുള്ള പിൻ തലക്കെട്ടുകൾ SV9, SV10, SV2
പിൻ തലക്കെട്ടുകളിലൂടെ SV8, SV9, SV10 (ചിത്രം 15-ലെ അമ്പടയാളങ്ങൾ (16), (14), (1) എന്നിവ വഴി ഉപയോക്താവിന് ഒരു സീരിയൽ I സ്ഥാപിക്കാൻ കഴിയും
ബാഹ്യ I2 C കണക്ഷനുള്ള പരിശീലന ബോർഡിലെ മൈക്രോകൺട്രോളറിൻ്റെ C = ഇൻ്റർ-ഇൻ്റഗ്രേറ്റഡ് സർക്യൂട്ട് (I2C മൊഡ്യൂളുകൾ. AVR മൈക്രോകൺട്രോളർ ATmega328P-യുടെ ഡാറ്റ ഷീറ്റിൽ I2C ഇൻ്റർഫേസിനെ TWI (രണ്ട് വയർ ഇൻ്റർഫേസ്) എന്ന് വിളിക്കുന്നു. മൂന്ന് കണക്റ്ററുകളുടെ വയറിംഗ് ചിത്രം 20 ൽ കാണിച്ചിരിക്കുന്നു. 
ചിത്രം 20: MCCAB ട്രെയിനിംഗ് ബോർഡിലെ TWI (=I2C)-ഇൻ്റർഫേസ്
+3.3 V ഓപ്പറേറ്റിംഗ് വോള്യമുള്ള സി മൊഡ്യൂളുകൾtage SV8 അല്ലെങ്കിൽ SV9-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഒരു ലെവൽ അഡ്ജസ്റ്റ്മെൻ്റ് എസ്tage SV8, SV9 എന്നിവയിൽ AVR മൈക്രോകൺട്രോളർ ATmega5P യുടെ 328 V സിഗ്നൽ ലെവൽ ബാഹ്യ മൊഡ്യൂളുകളുടെ 3.3 V സിഗ്നൽ ലെവലിലേക്ക് കുറയ്ക്കുന്നു. I At SV10, ആ I 2 C മൊഡ്യൂളുകൾ ബന്ധിപ്പിച്ചിരിക്കുന്നു, അവ ഓപ്പറേറ്റിംഗ് വോളിയത്തിൽ പ്രവർത്തിക്കുന്നുtage +5 V. I 2 C ഇൻ്റർഫേസിൽ SDA (സീരിയൽ DAta), SCL (സീരിയൽ ക്ലോക്ക്) എന്നീ രണ്ട് ദ്വിദിശ ലൈനുകൾ മാത്രമേ അടങ്ങിയിട്ടുള്ളൂ. മികച്ച വ്യതിരിക്തതയ്ക്കായി, ചിത്രം 20-ൽ SDA, SCL എന്നീ വരികൾ ലെവൽ അഡ്ജസ്റ്റ്മെൻ്റിന് മുമ്പ് 5V എന്ന പ്രത്യയം ഉപയോഗിച്ച് അടയാളപ്പെടുത്തിയിരിക്കുന്നു.tage, ലെവൽ അഡ്ജസ്റ്റ്മെൻ്റിന് ശേഷം 3V3 എന്ന പ്രത്യയം ഉപയോഗിച്ച്tagഇ. AVR മൈക്രോകൺട്രോളർ ATmega328P ന് അതിൻ്റെ ചിപ്പിൽ ഒരു ഹാർഡ്വെയർ TWI (രണ്ട് വയർ ഇൻ്റർഫേസ്, പ്രവർത്തനപരമായി I 2 C ഇൻ്റർഫേസിന് സമാനമാണ്) ഉണ്ട്, ഇതിൻ്റെ സിഗ്നലുകൾ SDA, SCL എന്നിവ മൈക്രോകൺട്രോളർ ചിപ്പിനുള്ളിൽ GPIOs A4, A5 എന്നിവയിലേക്ക് പിൻ ഹെഡർ SV6-ലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും. അമ്പ് (7) ചിത്രം 1 ൽ).
Arduino IDE-ൽ, I 2 C മൊഡ്യൂളുകളുടെ നിയന്ത്രണത്തിനായി വയർ ലൈബ്രറി ലഭ്യമാണ്, അത് #include ഉപയോഗിച്ച് ഉപയോക്തൃ പ്രോഗ്രാമിലേക്ക് സംയോജിപ്പിച്ചിരിക്കുന്നു. . 2
ATmega328P-യുടെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ ഉപയോഗത്തിനുള്ള സൂചനകൾ
ഓപ്പറേറ്റിംഗ് വോള്യം സ്വിച്ച് ചെയ്തതിന് ശേഷം സ്ഥിരസ്ഥിതി ക്രമീകരണത്തിൽtage മൈക്രോകൺട്രോളർ മൊഡ്യൂളായ Arduino NANO, മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിന് (ADC) അനലോഗ് വോള്യം ഉണ്ട്tage ശ്രേണി VADC = 0 ... +5 V. ഈ സാഹചര്യത്തിൽ, +5 V ഓപ്പറേറ്റിംഗ് വോളിയംtagമൈക്രോകൺട്രോളർ മൊഡ്യൂളിൻ്റെ ഇ വിസിസിയും റഫറൻസ് വോള്യമാണ്tagADC-യുടെ e VREF, കണക്ടർ SV6 ൻ്റെ REF ടെർമിനൽ (ചിത്രം 7 ലെ അമ്പടയാളം (1)) ബന്ധിപ്പിച്ചിട്ടില്ല. ATmega328P-യുടെ ADC ഒരു അനലോഗ് ഇൻപുട്ട് വോളിയം പരിവർത്തനം ചെയ്യുന്നുtage VADC അതിൻ്റെ ഇൻപുട്ടുകളിൽ ഒന്നിൽ A0 … A7 ഒരു ഡിജിറ്റൽ 10-ബിറ്റ് മൂല്യമായ Z ആക്കി. Z എന്ന സംഖ്യാ മൂല്യം ബൈനറി റെസ്പിലാണ്. ഹെക്സാഡെസിമൽ നമ്പർ ശ്രേണി ®
Z = 00 0000 00002 … 11 1111 11112 = 000 … 3FF16.
ഇത് ദശാംശ സംഖ്യ ശ്രേണിയുമായി യോജിക്കുന്നു
Z = 0 … (2– 1) = 0….
| 102310 |
| 1024 |
അനലോഗ് ഇൻപുട്ട് വോള്യത്തിൻ്റെ അനുവദനീയമായ ശ്രേണിtage എന്നത് VADC = 0 V … 10 1023 REFV⋅ ആണ്
അനലോഗ്/ഡിജിറ്റൽ പരിവർത്തനത്തിൻ്റെ കൃത്യത പ്രധാനമായും റഫറൻസ് വോളിയത്തിൻ്റെ ഗുണനിലവാരത്തെ ആശ്രയിച്ചിരിക്കുന്നുtage VREF, കാരണം മൈക്രോകൺട്രോളറിൻ്റെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടർ സൃഷ്ടിക്കുന്ന 10-ബിറ്റ് സംഖ്യാ മൂല്യത്തിന് Z ബാധകമാണ്:
Z =![]() .1024 (സമവാക്യം 1)
.1024 (സമവാക്യം 1)
VADC എന്നത് ഇൻപുട്ട് വോളിയമാണ്tagഅനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ e അതിൻ്റെ ഇൻപുട്ടുകളിലൊന്നായ A0 … A7, VREF എന്നിവ റഫറൻസ് വോളിയമാണ്tagകൺവെർട്ടറിനായി ഇ സെറ്റ്. റഫറൻസ് വാല്യംtage SV6 ൻ്റെ REF ടെർമിനലിനും സർക്യൂട്ട് ഗ്രൗണ്ട് GND നും ഇടയിലുള്ള ഉയർന്ന-ഇമ്പഡൻസ് വോൾട്ട്മീറ്റർ ഉപയോഗിച്ച് അളക്കാൻ കഴിയും. അനലോഗ്/ഡിജിറ്റൽ പരിവർത്തനത്തിൻ്റെ ഫലം ഒരു പൂർണ്ണസംഖ്യ മൂല്യമാണ്, അതായത്, രണ്ട് വോള്യങ്ങളുടെ വിഭജനത്തിൻ്റെ ഫലമായുണ്ടാകുന്ന ഏതെങ്കിലും ദശാംശ സ്ഥാനങ്ങൾtages VADC, VREF എന്നിവ വിച്ഛേദിക്കപ്പെട്ടിരിക്കുന്നു. +5 V ഓപ്പറേറ്റിംഗ് വോളിയംtage USB കേബിൾ മുഖേന പിസി ഫീഡ് ചെയ്യുന്നത് പിസിയുടെ സ്വിച്ചിംഗ് പവർ സപ്ലൈ വഴിയാണ് സൃഷ്ടിക്കുന്നത്. എന്നിരുന്നാലും, ഔട്ട്പുട്ട് വോളിയംtagഒരു സ്വിച്ചിംഗ് പവർ സപ്ലൈയുടെ e സാധാരണയായി നിസ്സാരമല്ലാത്ത AC വോള്യം ഉണ്ട്tagഅനലോഗ്/ഡിജിറ്റൽ പരിവർത്തനത്തിൻ്റെ കൃത്യത കുറയ്ക്കുന്ന ഇ ഘടകം അതിൽ സൂപ്പർഇമ്പോസ് ചെയ്യുന്നു. +3.3 V ഓക്സിലറി വോളിയം ഉപയോഗിച്ച് മികച്ച ഫലങ്ങൾ നേടാനാകുംtagഇ ലീനിയർ വോളിയം ഉപയോഗിച്ച് സ്ഥിരപ്പെടുത്തുന്നുtagറഫറൻസ് വോളിയം എന്ന നിലയിൽ MCCAB ട്രെയിനിംഗ് ബോർഡിലെ ഇ റെഗുലേറ്റർtagഅനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിനായി ഇ. ഈ ആവശ്യത്തിനായി, ATmega328P-യുടെ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടർ, നിർദ്ദേശങ്ങൾ അനലോഗ് റഫറൻസ്(എക്സ്റ്റേണൽ) ഉപയോഗിച്ച് പ്രോഗ്രാമിൽ ആരംഭിക്കുന്നു; // വോളിയം സജ്ജമാക്കുന്നുtagറഫറൻസ് വോള്യമായി പിൻ REFtagഇ മാറ്റിയ റഫറൻസ് വോള്യം അനുസരിച്ച്tagപിൻ ഹെഡർ SV6 (ചിത്രം 7 ലെ അമ്പടയാളം (1)) യുടെ e, പിൻ REF എന്നിവ ഒരു ഡ്യുപോണ്ട് കേബിൾ അല്ലെങ്കിൽ ഒരു ജമ്പർ വഴി പിൻ ഹെഡർ SV3.3-ലെ തൊട്ടടുത്തുള്ള +3 V പിൻ 3V6 ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
അനലോഗ് വോള്യം എന്നത് ശ്രദ്ധിക്കുകtagറഫറൻസ് വോള്യത്തിൽ e VADCtage VREF = 3.3 V ഇപ്പോഴും 10 … 0 ശ്രേണിയിൽ ഡിജിറ്റൽ 102310-ബിറ്റ് മൂല്യങ്ങളായി പരിവർത്തനം ചെയ്യപ്പെടുന്നു, എന്നാൽ അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ അളക്കുന്ന ശ്രേണി VADC = 0 ... +3.297 V എന്ന ശ്രേണിയിലേക്ക് ചുരുക്കിയിരിക്കുന്നു.
പ്രത്യുപകാരമായി, പരിവർത്തന ഫലങ്ങളുടെ മികച്ച റെസല്യൂഷൻ കൈവരിക്കാനാകും, കാരണം LSB (ഏറ്റവും ചെറിയ പരിഹരിക്കാവുന്ന മൂല്യം) ഇപ്പോൾ 3.2 mV മാത്രമാണ്.
![]() ഇൻപുട്ട് വോളിയംtage അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ VADC അതിൻ്റെ അനലോഗ് ഇൻപുട്ടുകളിൽ A0 … പിൻ ഹെഡർ SV7-ലെ A6 എല്ലായ്പ്പോഴും SV6-ൻ്റെ ടെർമിനൽ REF-ലെ VREF മൂല്യത്തേക്കാൾ ചെറുതായിരിക്കണം!
ഇൻപുട്ട് വോളിയംtage അനലോഗ്/ഡിജിറ്റൽ കൺവെർട്ടറിൻ്റെ VADC അതിൻ്റെ അനലോഗ് ഇൻപുട്ടുകളിൽ A0 … പിൻ ഹെഡർ SV7-ലെ A6 എല്ലായ്പ്പോഴും SV6-ൻ്റെ ടെർമിനൽ REF-ലെ VREF മൂല്യത്തേക്കാൾ ചെറുതായിരിക്കണം!
ഉപയോക്താവ് VADC < VREF!
![]() “A/D പരിവർത്തനത്തിൻ്റെ കൃത്യത” എന്നതിന് പേജ് 11-ലെ കുറിപ്പും കാണുക.
“A/D പരിവർത്തനത്തിൻ്റെ കൃത്യത” എന്നതിന് പേജ് 11-ലെ കുറിപ്പും കാണുക.
MCCAB ട്രെയിനിംഗ് ബോർഡിനായുള്ള ലൈബ്രറി "MCCAB_Lib"
MCCAB ട്രെയിനിംഗ് ബോർഡിലെ നിരവധി ഹാർഡ്വെയർ ഘടകങ്ങൾ (സ്വിച്ചുകൾ, ബട്ടണുകൾ, LED-കൾ, 3 × 3 LED മാട്രിക്സ്, ബസർ) നിയന്ത്രിക്കുന്നതിൽ ഉപയോക്താവിനെ പിന്തുണയ്ക്കുന്നതിന്, "MCCAB_Lib" ലൈബ്രറി ലഭ്യമാണ്, അത് ഇൻ്റർനെറ്റ് സൈറ്റിൽ നിന്ന് സൗജന്യമായി ഡൗൺലോഡ് ചെയ്യാവുന്നതാണ്. www.elektor.com/20440 പരിശീലന ബോർഡ് വാങ്ങുന്നവർ വഴി.
MCCAB പരിശീലന ബോർഡിൻ്റെ ഉപയോഗത്തെക്കുറിച്ചുള്ള കൂടുതൽ സാഹിത്യം
"Arduino സ്റ്റാർട്ടേഴ്സിനുള്ള മൈക്രോകൺട്രോളേഴ്സ് ഹാൻഡ്സ്-ഓൺ കോഴ്സ്" (ISBN 978-3-89576-5452) എന്ന പുസ്തകത്തിൽ, മൈക്രോകൺട്രോളറുകളുടെ പ്രോഗ്രാമിംഗിനെ കുറിച്ചും Arduino IDE-യിൽ ഉപയോഗിക്കുന്ന പ്രോഗ്രാമിംഗ് ഭാഷ C യെ കുറിച്ചും വിശദമായ ആമുഖം മാത്രമല്ല നിങ്ങൾ കണ്ടെത്തുന്നത്. പ്രോഗ്രാമുകൾ എഴുതുന്നതിന്, മാത്രമല്ല "MCCAB_Lib" ലൈബ്രറിയുടെ രീതികളെക്കുറിച്ചുള്ള വിശദമായ വിവരണവും വിവിധ ആപ്ലിക്കേഷനുകൾ മുൻampMCCAB ട്രെയിനിംഗ് ബോർഡ് ഉപയോഗിക്കുന്നതിനുള്ള വ്യായാമ പരിപാടികളും.
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
elektor Arduino നാനോ പരിശീലന ബോർഡ് MCCAB [pdf] നിർദ്ദേശ മാനുവൽ Arduino നാനോ ട്രെയിനിംഗ് ബോർഡ് MCCAB, Arduino, നാനോ ട്രെയിനിംഗ് ബോർഡ് MCCAB, ട്രെയിനിംഗ് ബോർഡ് MCCAB, ബോർഡ് MCCAB |