គាំទ្រ BUNKER
ក្រុមមនុស្សយន្ត Agile X
សៀវភៅណែនាំអ្នកប្រើប្រាស់ V.1.0.0 2021.10

Bunker Pro បានតាមដានមនុស្សយន្តចល័ត
ជំពូកនេះមានព័ត៌មានសុវត្ថិភាពសំខាន់ៗ មុនពេលដែលមនុស្សយន្តត្រូវបានបើកដំណើរការជាលើកដំបូង បុគ្គល ឬស្ថាប័នណាមួយត្រូវតែអាន និងយល់ព័ត៌មាននេះមុនពេលប្រើឧបករណ៍។ ប្រសិនបើអ្នកមានចម្ងល់អំពីការប្រើប្រាស់ សូមទាក់ទងមកយើងខ្ញុំតាមរយៈ support@agilex.ai. សូមអនុវត្តតាម និងអនុវត្តសេចក្តីណែនាំ និងការណែនាំអំពីការដំឡើងទាំងអស់នៅក្នុងជំពូកនៃសៀវភៅណែនាំនេះ ដែលមានសារៈសំខាន់ខ្លាំងណាស់។ ការយកចិត្តទុកដក់ជាពិសែសគួរតែូវបានបង់ទៅលើអត្ថបទទាក់ទងនឹងផ្លាកសញ្ញាព្រមាន។
![]() ព័ត៌មានសុវត្ថិភាពសំខាន់ៗ
ព័ត៌មានសុវត្ថិភាពសំខាន់ៗ
ព័ត៌មាននៅក្នុងសៀវភៅណែនាំនេះមិនរួមបញ្ចូលការរចនា ការដំឡើង និងប្រតិបត្តិការនៃកម្មវិធីមនុស្សយន្តពេញលេញនោះទេ ហើយក៏មិនរួមបញ្ចូលគ្រឿងកុំព្យូទ័រទាំងអស់ដែលអាចប៉ះពាល់ដល់សុវត្ថិភាពនៃប្រព័ន្ធពេញលេញនេះដែរ។ ការរចនា និងការប្រើប្រាស់ប្រព័ន្ធពេញលេញត្រូវតែគោរពតាមតម្រូវការសុវត្ថិភាពដែលបានបង្កើតឡើងនៅក្នុងស្តង់ដារ និងបទប្បញ្ញត្តិនៃប្រទេសដែលមនុស្សយន្តត្រូវបានដំឡើង។ អ្នកធ្វើសមាហរណកម្ម និងអតិថិជនចុងក្រោយរបស់ BUNKERPRO មានទំនួលខុសត្រូវក្នុងការធានាការអនុលោមតាមបទប្បញ្ញត្តិពាក់ព័ន្ធ និងច្បាប់ និងបទប្បញ្ញត្តិជាក់ស្តែង និងដើម្បីធានាថាមិនមានគ្រោះថ្នាក់ធំដុំនៅក្នុងការអនុវត្តពេញលេញនៃមនុស្សយន្តនោះទេ។ នេះរួមបញ្ចូល ប៉ុន្តែមិនកំណត់ចំពោះដូចខាងក្រោម៖
1. ប្រសិទ្ធភាព និងការទទួលខុសត្រូវ
- ធ្វើការវាយតម្លៃហានិភ័យនៃប្រព័ន្ធមនុស្សយន្តពេញលេញ។
- ភ្ជាប់ឧបករណ៍សុវត្ថិភាពបន្ថែមនៃគ្រឿងម៉ាស៊ីនផ្សេងទៀតដែលកំណត់ដោយការវាយតម្លៃហានិភ័យជាមួយគ្នា។
- សូមបញ្ជាក់ថាការរចនានិងការដំឡើងគ្រឿងកុំព្យូទ័ររបស់ប្រព័ន្ធមនុស្សយន្តទាំងមូល រួមទាំងប្រព័ន្ធ Software និង Hardware គឺត្រឹមត្រូវ។
- មនុស្សយន្តនេះមិនមានមុខងារសុវត្ថិភាពដែលពាក់ព័ន្ធនៃមនុស្សយន្តចល័តស្វយ័តពេញលេញទេ រួមទាំងប៉ុន្តែមិនកំណត់ចំពោះការប្រឆាំងនឹងការប៉ះទង្គិចដោយស្វ័យប្រវត្តិ ការប្រឆាំងនឹងការធ្លាក់ ការព្រមានអំពីវិធីសាស្រ្តរបស់សត្វ។ល។ បទប្បញ្ញត្តិពាក់ព័ន្ធ និងច្បាប់ និងបទប្បញ្ញត្តិជាធរមាន ដើម្បីធានាថាមនុស្សយន្តដែលបានបង្កើតគឺគ្មានគ្រោះថ្នាក់ និងគ្រោះថ្នាក់ដែលលាក់កំបាំងណាមួយនៅក្នុងការអនុវត្តជាក់ស្តែង។
- ប្រមូលឯកសារទាំងអស់នៅក្នុងបច្ចេកទេស file៖ រួមទាំងការវាយតម្លៃហានិភ័យ និងសៀវភៅណែនាំនេះ។
- ដឹងពីហានិភ័យសុវត្ថិភាពដែលអាចកើតមាន មុនពេលដំណើរការ និងប្រើប្រាស់ឧបករណ៍។
2. បរិស្ថាន
- សម្រាប់ការប្រើប្រាស់លើកដំបូង សូមអានសៀវភៅណែនាំនេះដោយប្រុងប្រយ័ត្ន ដើម្បីយល់ពីខ្លឹមសារប្រតិបត្តិការជាមូលដ្ឋាន និងលក្ខណៈបច្ចេកទេសប្រតិបត្តិការ។
- ជ្រើសរើសតំបន់ដែលបើកចំហរសម្រាប់ការបញ្ជាពីចម្ងាយ ពីព្រោះយានជំនិះខ្លួនឯងមិនមានឧបករណ៍ចាប់សញ្ញាបញ្ចៀសឧបសគ្គដោយស្វ័យប្រវត្តិទេ។
- ប្រើក្នុងសីតុណ្ហភាពព័ទ្ធជុំវិញនៃ -20-60 ។
- ប្រសិនបើរថយន្តមិនកំណត់កម្រិតការពារ IP ផ្ទាល់ខ្លួនទេ សមត្ថភាពការពារទឹក និងធូលីរបស់វាគឺ IP66 ។
3. ពិនិត្យ
- ត្រូវប្រាកដថាឧបករណ៍នីមួយៗមានបន្ទុកគ្រប់គ្រាន់។
- ត្រូវប្រាកដថារថយន្តមិនមានភាពមិនប្រក្រតីជាក់ស្តែង។
- ពិនិត្យមើលថាតើថ្មរបស់ឧបករណ៍បញ្ជាពីចម្ងាយមានបន្ទុកគ្រប់គ្រាន់ដែរឬទេ។
- សូមប្រាកដថាកុងតាក់ឈប់សង្គ្រោះបន្ទាន់ត្រូវបានបញ្ចេញនៅពេលប្រើ។
4. ប្រតិបត្តិការ
- ត្រូវប្រាកដថាតំបន់ជុំវិញគឺបើកចំហរក្នុងអំឡុងពេលប្រតិបត្តិការ។
- ការបញ្ជាពីចម្ងាយនៅក្នុងបន្ទាត់នៃការមើលឃើញ។
- ការផ្ទុកអតិបរមានៃ BUNKERPRO គឺ 120KG ។ នៅពេលប្រើប្រាស់ ត្រូវប្រាកដថាបន្ទុកមិនលើសពី 120KG ។
- នៅពេលដំឡើងផ្នែកបន្ថែមខាងក្រៅសម្រាប់ BUNKERPRO សូមបញ្ជាក់ចំណុចកណ្តាលនៃម៉ាស់នៃផ្នែកបន្ថែម ហើយត្រូវប្រាកដថាវាស្ថិតនៅចំកណ្តាលនៃការបង្វិល។
- នៅពេលដែលឧបករណ៍វ៉ុលtage ទាបជាង 48V សូមសាកវាទាន់ពេល។
- នៅពេលដែលឧបករណ៍មានភាពមិនប្រក្រតី សូមបញ្ឈប់ការប្រើប្រាស់វាភ្លាមៗ ដើម្បីជៀសវាងការខូចខាតបន្ទាប់បន្សំ។
- នៅពេលដែលឧបករណ៍មានភាពមិនប្រក្រតី សូមទាក់ទងបុគ្គលិកបច្ចេកទេសដែលពាក់ព័ន្ធ ហើយកុំដោះស្រាយដោយគ្មានការអនុញ្ញាត។
- សូមប្រើវាក្នុងបរិយាកាសដែលបំពេញតាមតម្រូវការនៃកម្រិតការពារដោយយោងតាមកម្រិតការពារ IP របស់ឧបករណ៍។
- កុំរុញឡានដោយផ្ទាល់។
- នៅពេលសាកថ្ម សូមប្រាកដថាសីតុណ្ហភាពព័ទ្ធជុំវិញគឺធំជាង 0°C។
5. ការថែទាំ
- ពិនិត្យភាពតានតឹងនៃបទដែលបានផ្អាកជាទៀងទាត់ ហើយរឹតបន្តឹងបទរៀងរាល់ 150 ~ 200H ។
- បន្ទាប់ពីប្រតិបត្តិការរៀងរាល់ 500 ម៉ោងម្តង សូមពិនិត្យមើលប៊ូឡុង និងគ្រាប់នៃផ្នែកនីមួយៗនៃរាងកាយ។ ខ្ញុំរឹតបន្តឹងវាភ្លាមៗប្រសិនបើពួកគេរលុង។
- ដើម្បីធានាបាននូវសមត្ថភាពផ្ទុករបស់ថ្ម ថ្មគួរតែត្រូវបានរក្សាទុកជាមួយនឹងការសាកថ្ម ហើយថ្មគួរត្រូវបានសាកជាប្រចាំ ប្រសិនបើវាមិនប្រើរយៈពេលយូរ។
ការណែនាំអំពី BUNKERPRO
BUNKERPRO គឺជារថយន្តតួដែលត្រូវបានតាមដានសម្រាប់កម្មវិធីឧស្សាហកម្មគ្រប់ជ្រុងជ្រោយ។ វាមានលក្ខណៈនៃប្រតិបត្តិការសាមញ្ញ និងរសើប កន្លែងអភិវឌ្ឍន៍ធំ ស័ក្តិសមសម្រាប់ការអភិវឌ្ឍន៍ និងកម្មវិធីក្នុងវិស័យផ្សេងៗ ប្រព័ន្ធព្យួរឯករាជ្យ ការស្រូបឆក់ធន់ធ្ងន់ សមត្ថភាពឡើងខ្ពស់ និងអាចឡើងជណ្តើរបាន។ វាអាចត្រូវបានប្រើសម្រាប់ការអភិវឌ្ឍមនុស្សយន្តពិសេសដូចជាមនុស្សយន្តសម្រាប់ការត្រួតពិនិត្យ និងការរុករក ការសង្គ្រោះ និង EOD ការបាញ់ប្រហារពិសេស ការដឹកជញ្ជូនពិសេសជាដើម ដើម្បីដោះស្រាយបញ្ហាចលនារបស់មនុស្សយន្ត។
បញ្ជីផលិតផល
| ឈ្មោះ | បរិមាណ |
| រាងកាយមនុស្សយន្ត BUNKER PRO | X1 |
| ឧបករណ៍សាកថ្ម (AC220V) | X1 |
| ឧបករណ៍ដោតអាកាសចរណ៍បុរស (4-Pin) | X1 |
| ឧបករណ៍បញ្ជូនបញ្ជាពីចម្ងាយ FS (ស្រេចចិត្ត) | X1 |
| ម៉ូឌុលទំនាក់ទំនង USB ទៅ CAN | X1 |
លក្ខណៈបច្ចេកទេស
| ប្រភេទប៉ារ៉ាម៉ែត្រ | ធាតុ | តម្លៃ |
| វិមាត្រ | វិមាត្រ | 1064mm * 845mm * 73mm |
| កម្ពស់តួ | 120 ម។ | |
| ទទឹងបទ | 150 ម។ | |
| ប្រវែង | 740 ម។ | |
| ទម្ងន់ | ទម្ងន់ | ប្រហែល 180 គីឡូក្រាម |
| ផ្ទុក | 120 គីឡូក្រាម | |
| ថ្ម | ប្រភេទ | ថ្មលីចូម |
| សមត្ថភាព | 60AH | |
| វ៉ុលtage | 48V | |
| ចលនា | សមត្ថភាពឡើងភ្នំអតិបរមា | 30° |
| ល្បឿនអតិបរមា | 1.5m/s | |
| កាំបង្វិលអប្បបរមា | អាចបង្វិលនៅនឹងកន្លែង | |
| ឧបសគ្គអតិបរមា | 180 ម។ | |
| ប៉ារ៉ាម៉ែត្រម៉ូទ័រ | 2 × 1500W servo គ្មានជក់ ម៉ូទ័រ | |
| ប៉ារ៉ាម៉ែត្រឌីសកូដ | 2500 ជួរ | |
| សីតុណ្ហភាពប្រតិបត្តិការ | -20~60° | |
| សមាមាត្រកាត់បន្ថយ | ១២០០:១ | |
| គ្រប់គ្រង | របៀបគ្រប់គ្រង | ការបញ្ជាពីចម្ងាយ |
| ឧបករណ៍បញ្ជូន RC | 2.4G / ចម្ងាយខ្លាំង 200M | |
| ចំណុចប្រទាក់ទំនាក់ទំនង | អាច |
តម្រូវការសម្រាប់ការអភិវឌ្ឍន៍
BUNKERPRO ត្រូវបានបំពាក់ដោយឧបករណ៍បញ្ជាពីចម្ងាយ FS នៅរោងចក្រ ហើយអ្នកប្រើប្រាស់អាចគ្រប់គ្រងតួមនុស្សយន្តចល័ត BUNKERPRO តាមរយៈការបញ្ជាពីចម្ងាយដើម្បីបញ្ចប់ប្រតិបត្តិការ និងចលនាបង្វិល។ BUNKERPRO ត្រូវបានបំពាក់ដោយចំណុចប្រទាក់ CAN ហើយអ្នកប្រើប្រាស់អាចអនុវត្តការអភិវឌ្ឍន៍បន្ទាប់បន្សំតាមរយៈវា។
មូលដ្ឋាន
ផ្នែកនេះនឹងផ្តល់នូវការណែនាំជាមូលដ្ឋានដល់តួមនុស្សយន្តចល័ត BUNKERPRO ដូច្នេះអ្នកប្រើប្រាស់ និងអ្នកអភិវឌ្ឍន៍មានការយល់ដឹងជាមូលដ្ឋានអំពីតួ BUNKERPRO ។
1 ការណែនាំអំពីចំណុចប្រទាក់អគ្គិសនី
ចំណុចប្រទាក់អគ្គិសនីខាងក្រោយត្រូវបានបង្ហាញក្នុងរូបភាព 2.1 ដែល Q1 គឺជាចំណុចប្រទាក់អាកាសចរណ៍ CAN និង 48V, Q2 គឺជាកុងតាក់ថាមពល, Q3 គឺជាចំណុចប្រទាក់សាកថ្ម, Q4 គឺជាអង់តែន, Q5 និង Q6 គឺជាចំណុចប្រទាក់បំបាត់កំហុសរបស់អ្នកបើកបរ និងមេ។ គ្រប់គ្រងចំណុចប្រទាក់បំបាត់កំហុស (មិនបើកទៅខាងក្រៅ) ហើយ Q7 គឺជាអន្តរកម្មនៃការបង្ហាញថាមពល។

និយមន័យនៃចំណុចប្រទាក់ទំនាក់ទំនង និងថាមពលរបស់ Q1 ត្រូវបានបង្ហាញក្នុងរូបភាព 2-2 ។

| ពិនលេខ | ប្រភេទម្ជុល | មុខងារនិង និយមន័យ | សុន្ទរកថា |
| 1 | ថាមពល | វី.ស៊ី.ស៊ី | ថាមពលវិជ្ជមាន, វ៉ុលtage ជួរ 23 - 29.2V, អតិបរមា។ បច្ចុប្បន្ន 10A |
| 2 | ថាមពល | GND | ថាមពលអវិជ្ជមាន |
| 3 | អាច | CAN_H | ឡានក្រុងអាចខ្ពស់។ |
| 4 | អាច | CAN_L | អាចឡានក្រុងទាប |
រូបភាព 2.2 និយមន័យ Pin នៃចំណុចប្រទាក់ផ្នែកបន្ថែមអាកាសចរណ៍ខាងក្រោយ
ការណែនាំអំពីការបញ្ជាពីចម្ងាយ
ការបញ្ជាពីចម្ងាយ FS គឺជាគ្រឿងបន្លាស់ស្រេចចិត្តសម្រាប់ BUNKERPRO ។ អតិថិជនអាចជ្រើសរើសតាមតម្រូវការជាក់ស្តែង។ ឧបករណ៍បញ្ជាពីចម្ងាយអាចគ្រប់គ្រងតួមនុស្សយន្តសកល BUNKERPRO បានយ៉ាងងាយស្រួល។ នៅក្នុងផលិតផលនេះ យើងប្រើការរចនាបិទបើកដៃឆ្វេង។ សូមមើលរូបភាព 2.3 សម្រាប់និយមន័យ និងមុខងាររបស់វា។ មុខងាររបស់ប៊ូតុងត្រូវបានកំណត់ជា៖ SWA, SWC និង SWD ត្រូវបានបិទជាបណ្តោះអាសន្ន។ SWB គឺជាប៊ូតុងជ្រើសរើសរបៀបបញ្ជា ដែលចុចទៅខាងលើជារបៀបបញ្ជាពាក្យបញ្ជា ដែលចុចទៅកណ្តាលគឺរបៀបបញ្ជាពីចម្ងាយ។ S1 គឺជាប៊ូតុងបិទបើក ដែលគ្រប់គ្រង BUNKERPRO ទៅមុខ និងថយក្រោយ។ S2 គ្រប់គ្រងការបង្វិល ខណៈ POWER គឺជាប៊ូតុងថាមពល ហើយអ្នកអាចបើកការបញ្ជាពីចម្ងាយដោយចុចពួកវាក្នុងពេលតែមួយ។ វាគួរតែត្រូវបានកត់សម្គាល់ថា SWA, SWB, SWC និង SWD ត្រូវតែនៅខាងលើនៅពេលដែលការបញ្ជាពីចម្ងាយត្រូវបានបើក។

រូបភាព 2.3 ដ្យាក្រាមគ្រោងការណ៍នៃប៊ូតុងបញ្ជាពីចម្ងាយ FS
សេចក្តីណែនាំស្តីពីការទាមទារការគ្រប់គ្រង និងចលនា
យើងរៀបចំប្រព័ន្ធយោងសំរបសំរួលសម្រាប់យានជំនិះចល័តដីតាមស្តង់ដារ ISO 8855 ដូចបង្ហាញក្នុងរូបភាព 2.4 ។

ដូចដែលបានបង្ហាញក្នុងរូបភាព 2.4 តួរថយន្តរបស់ BUNKERPRO គឺស្របទៅនឹងអ័ក្ស X នៃប្រព័ន្ធសំរបសំរួលយោងដែលបានបង្កើតឡើង។
នៅក្នុងរបៀបបញ្ជាពីចម្ងាយ រុញយ៉យស្ទីកបញ្ជាពីចម្ងាយ S1 ទៅមុខដើម្បីផ្លាស់ទីក្នុងទិសដៅវិជ្ជមាននៃអ័ក្ស X ហើយរុញ S1 ថយក្រោយដើម្បីផ្លាស់ទីក្នុងទិសដៅអវិជ្ជមាននៃអ័ក្ស X ។ នៅពេលដែល S1 ត្រូវបានរុញទៅតម្លៃអតិបរមា ល្បឿនចលនាក្នុងទិសដៅវិជ្ជមាននៃអ័ក្ស X គឺអតិបរមា ហើយនៅពេលដែលវាត្រូវបានរុញទៅតម្លៃអប្បបរមា ល្បឿនចលនាក្នុងទិសដៅអវិជ្ជមាននៃអ័ក្ស X គឺអតិបរមា។ យ៉យស្ទីកបញ្ជាពីចម្ងាយ S2 គ្រប់គ្រងការបង្វិលតួរថយន្តទៅឆ្វេង និងស្តាំ។ នៅពេលដែល S2 ត្រូវបានរុញទៅខាងឆ្វេង តួរថយន្តបង្វិលពីទិសដៅវិជ្ជមាននៃអ័ក្ស X ទៅទិសដៅវិជ្ជមាននៃអ័ក្ស Y ហើយនៅពេលដែល S2 ត្រូវបានរុញទៅខាងស្តាំ តួរថយន្តនឹងបង្វិលពីចំនុចវិជ្ជមាន។
ទិសដៅនៃអ័ក្ស X ទៅទិសដៅអវិជ្ជមាននៃអ័ក្ស Y ។ នៅពេលដែល S2 ត្រូវបានរុញទៅខាងឆ្វេងទៅតម្លៃអតិបរមា ល្បឿនលីនេអ៊ែរនៃការបង្វិលច្រាសទ្រនិចនាឡិកាគឺអតិបរមា ហើយនៅពេលដែល S2 ត្រូវបានរុញទៅខាងស្តាំទៅតម្លៃអតិបរមា ល្បឿនលីនេអ៊ែរនៃការបង្វិលទ្រនិចនាឡិកាគឺអតិបរមា។ នៅក្នុងរបៀបបញ្ជាបញ្ជាតម្លៃវិជ្ជមាននៃល្បឿនលីនេអ៊ែរមានន័យថាផ្លាស់ទីក្នុងទិសដៅវិជ្ជមាននៃអ័ក្ស X ហើយតម្លៃអវិជ្ជមាននៃល្បឿនលីនេអ៊ែរមានន័យថាផ្លាស់ទីក្នុងទិសដៅអវិជ្ជមាននៃអ័ក្ស X; តម្លៃវិជ្ជមាននៃល្បឿនមុំមានន័យថា តួរថយន្តផ្លាស់ទីពីទិសវិជ្ជមាននៃអ័ក្ស X ទៅទិសវិជ្ជមាននៃអ័ក្ស Y ហើយតម្លៃអវិជ្ជមាននៃល្បឿនមុំមានន័យថា តួរថយន្តផ្លាស់ទីពីទិសដៅវិជ្ជមាននៃ អ័ក្ស X ទៅទិសដៅអវិជ្ជមាននៃអ័ក្ស Y ។
ការប្រើប្រាស់និងការអភិវឌ្ឍន៍
ផ្នែកនេះណែនាំជាចម្បងអំពីប្រតិបត្តិការជាមូលដ្ឋាន និងការប្រើប្រាស់វេទិកា BUNKERPRO និងរបៀបអនុវត្តការអភិវឌ្ឍន៍បន្ទាប់បន្សំនៃតួរថយន្តតាមរយៈចំណុចប្រទាក់ CAN ខាងក្រៅ និងពិធីការរថយន្តក្រុង CAN ។
ការប្រើប្រាស់និងប្រតិបត្តិការ
ពិនិត្យ
- ពិនិត្យស្ថានភាពនៃតួរថយន្ត។ ពិនិត្យមើលថាតើតួរថយន្តមានភាពមិនប្រក្រតីជាក់ស្តែងឬអត់ បើដូច្នេះ សូមទាក់ទងផ្នែកគាំទ្រក្រោយការលក់។
- នៅពេលប្រើជាលើកដំបូង សូមបញ្ជាក់ថាតើ Q2 (កុងតាក់ថាមពល) នៅក្នុងបន្ទះអគ្គិសនីខាងក្រោយត្រូវបានចុចឬអត់។ ប្រសិនបើវាមិនត្រូវបានចុចសូមចុចវាហើយបញ្ចេញវាបន្ទាប់មកវាស្ថិតនៅក្នុងស្ថានភាពដែលបានចេញផ្សាយ។
ការចាប់ផ្តើម
- ចុចកុងតាក់ថាមពល (Q2 នៅក្នុងបន្ទះអគ្គិសនី); នៅក្រោមកាលៈទេសៈធម្មតា ពន្លឺនៃកុងតាក់ថាមពលនឹងភ្លឺ ហើយ voltmeter នឹងបង្ហាញវ៉ុលថ្ម។tage ជាធម្មតា;
- ពិនិត្យវ៉ុលថ្មtagអ៊ី ប្រសិនបើវ៉ុលtage គឺធំជាង 48V វាមានន័យថាវ៉ុលថ្មtagអ៊ីគឺធម្មតា។ ប្រសិនបើវ៉ុលtage ទាបជាង 48V សូមសាកថ្ម។ នៅពេលដែលវ៉ុលtage គឺទាបជាង 46V, BUNKERPRO មិនអាចផ្លាស់ទីជាធម្មតាទេ។
បិទ
- ចុចកុងតាក់ថាមពលដើម្បីកាត់ផ្តាច់ថាមពល;
ដំណើរការមូលដ្ឋាននៃការបញ្ជាពីចម្ងាយ៖
- បន្ទាប់ពីចាប់ផ្តើមតួមនុស្សយន្ត BUNKERPRO ជាធម្មតា ចាប់ផ្តើមការបញ្ជាពីចម្ងាយ ហើយជ្រើសរើសរបៀបបញ្ជាពីចម្ងាយ ដើម្បីគ្រប់គ្រងចលនារបស់វេទិកា BUNKER PRO តាមរយៈឧបករណ៍បញ្ជាពីចម្ងាយ។
សាកថ្ម
BUNKERPRO ត្រូវបានបំពាក់ដោយឆ្នាំងសាកស្តង់ដារតាមលំនាំដើម ដែលអាចបំពេញតម្រូវការសាកថ្មរបស់អតិថិជន។ នីតិវិធីប្រតិបត្តិការជាក់លាក់នៃការសាកថ្មមានដូចខាងក្រោម៖
- ត្រូវប្រាកដថាតួ BUNKERPRO ស្ថិតក្នុងស្ថានភាពបិទ។ មុនពេលសាកថ្ម សូមប្រាកដថា Q2 (power switch) នៅក្នុងកុងសូលអគ្គិសនីខាងក្រោយត្រូវបានបិទ។ បញ្ចូលឌុយរបស់ឆ្នាំងសាកចូលទៅក្នុង
- ចំណុចប្រទាក់សាកថ្ម Q3 នៅក្នុងបន្ទះត្រួតពិនិត្យអគ្គិសនីខាងក្រោយ;
- ភ្ជាប់ឆ្នាំងសាកទៅនឹងការផ្គត់ផ្គង់ថាមពល ហើយបើកកុងតាក់ឆ្នាំងសាក ដើម្បីចូលទៅក្នុងស្ថានភាពសាក។
- នៅពេលសាកថ្មតាមលំនាំដើម មិនមានភ្លើងសញ្ញានៅលើតួទេ។ ថាតើវាកំពុងសាកឬអត់ អាស្រ័យលើសូចនាករស្ថានភាពរបស់ឆ្នាំងសាក។
ការអភិវឌ្ឍន៍
BUNKERPRO ផ្តល់នូវចំណុចប្រទាក់ CAN សម្រាប់ការអភិវឌ្ឍន៍របស់អ្នកប្រើប្រាស់ ហើយអ្នកប្រើប្រាស់អាចគ្រប់គ្រងតួរថយន្តតាមរយៈចំណុចប្រទាក់នេះ។
ស្តង់ដារទំនាក់ទំនង CAN នៅក្នុង BUNKERPRO ទទួលយកស្តង់ដារ CAN2.0B; អត្រា baud ទំនាក់ទំនងគឺ 500K ហើយទម្រង់សារទទួលយកទម្រង់ MOTOROLA ។ ល្បឿនលីនេអ៊ែរនៃចលនា និងល្បឿនមុំនៃការបង្វិលតួអាចត្រូវបានគ្រប់គ្រងតាមរយៈចំណុចប្រទាក់រថយន្តក្រុង CAN ខាងក្រៅ។ BUNKERPRO នឹងផ្តល់មតិឡើងវិញនូវព័ត៌មានស្ថានភាពចលនាបច្ចុប្បន្ន និងព័ត៌មានស្ថានភាពនៃតួ BUNKERPRO ក្នុងពេលវេលាជាក់ស្តែង។
ពិធីការរួមបញ្ចូលស៊ុមមតិកែលម្អស្ថានភាពប្រព័ន្ធ ស៊ុមមតិកែលម្អការគ្រប់គ្រងចលនា និងស៊ុមត្រួតពិនិត្យ។
ខ្លឹមសារនៃពិធីសារមានដូចខាងក្រោម៖
ពាក្យបញ្ជា មតិកែលម្អស្ថានភាពប្រព័ន្ធ រួមមានមតិកែលម្អស្ថានភាពតួរថយន្តបច្ចុប្បន្ន មតិកែលម្អស្ថានភាពរបៀបគ្រប់គ្រង វ៉ុលថ្មtage មតិកែលម្អ និងកំហុសឆ្គង។ ខ្លឹមសារនៃពិធីការត្រូវបានបង្ហាញក្នុងតារាង 3.1 ។
តារាង 3.1 ស៊ុមមតិត្រឡប់នៃស្ថានភាពប្រព័ន្ធ BUNKERPRO Chassis
| ឈ្មោះពាក្យបញ្ជា | ពាក្យបញ្ជា មតិកែលម្អស្ថានភាពប្រព័ន្ធ | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត និង ms) | ទទួលការអស់ពេល (ms) |
| តួដោយខ្សែ | ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | 0x221 | 200ms | គ្មាន |
| ប្រវែងទិន្នន័យ | 0x08 | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ [0] | ស្ថានភាពបច្ចុប្បន្នរបស់ តួរថយន្ត | int8 ដែលមិនបានចុះហត្ថលេខា | ប្រព័ន្ធ 0x00 ក្នុងស្ថានភាពធម្មតា។ Ox01 របៀបឈប់សង្គ្រោះបន្ទាន់ ការលើកលែងប្រព័ន្ធ 0x02 | |
| បៃ f 1] | ការគ្រប់គ្រងរបៀប | int8 ដែលមិនបានចុះហត្ថលេខា | Ox00 របៀបរង់ចាំ Ox01 CAN របៀបបញ្ជាបញ្ជា 0x03 របៀបបញ្ជាពីចម្ងាយ | |
| បៃ [2] បៃ [3] | វ៉ុលថ្មtagអ៊ី គឺ 8 ប៊ីតខ្ពស់ជាង v bafteryoltagអ៊ី គឺ ប្រាំបីប៊ីតទាប | មិនបានចុះហត្ថលេខា int16 | វ៉ុលពិតtagex 10 (ជាមួយនឹងភាពត្រឹមត្រូវនៃ 0.1V) | |
| ត្រូវ [4] បៃ [5] | កក់ទុក បរាជ័យ ព័ត៌មាន | int8 ដែលមិនបានចុះហត្ថលេខា | 0x0 សូមមើល [ការពិពណ៌នាអំពីព័ត៌មានកំហុស) | |
| បៃ [6] | កក់ទុក | – | អុក ១៦៥ | |
| បៃ [7] | រាប់ (រាប់) | int8 ដែលមិនបានចុះហត្ថលេខា | 0-255 ចំនួនវដ្ត: រាល់ពេលដែលការណែនាំត្រូវបានផ្ញើ ចំនួននឹងកើនឡើងម្តង |
តារាង 3.2 ការពិពណ៌នាអំពីព័ត៌មានកំហុស
| ការពិពណ៌នាអំពីព័ត៌មានកំហុស | ||
| បៃ | ប៊ីត | អត្ថន័យ |
| ប៊ីត [0] | ថ្មក្រោមtage កំហុស | |
| ប៊ីត [1] | ថ្មក្រោមtage ការព្រមាន | |
| ប៊ីត [2] | ការការពារការផ្តាច់ការបញ្ជាពីចម្ងាយ (0: ធម្មតា, 1: ការផ្តាច់ការបញ្ជាពីចម្ងាយ) | |
| ប៊ីត [3] | ការបរាជ័យទំនាក់ទំនងម៉ូទ័រលេខ 1 (0: No បរាជ័យ ១៖ បរាជ័យ | |
| ប៊ីត [4] | ការបរាជ័យទំនាក់ទំនងម៉ូទ័រលេខ 2 (0: No បរាជ័យ ១៖ បរាជ័យ | |
| ប៊ីត [5] | បម្រុងទុក, លំនាំដើម 0 | |
| ប៊ីត [6] | បម្រុងទុក, លំនាំដើម 0 | |
| ប៊ីត [7] | បម្រុងទុក, លំនាំដើម 0 |
ពាក្យបញ្ជានៃស៊ុមមតិត្រឡប់នៃការគ្រប់គ្រងចលនារួមបញ្ចូលទាំងមតិត្រឡប់នៃល្បឿនលីនេអ៊ែរបច្ចុប្បន្ន និងល្បឿនមុំនៃតួរថយន្តដែលកំពុងផ្លាស់ទី។ ខ្លឹមសារពិធីការជាក់លាក់ត្រូវបានបង្ហាញក្នុងតារាង 3.3 ។
តារាង 3.3 ស៊ុមមតិកែលម្អការគ្រប់គ្រងចលនា
| ឈ្មោះពាក្យបញ្ជា | ពាក្យបញ្ជា ការគ្រប់គ្រងចលនា | |||
| កំពុងផ្ញើ ថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (ms) | ទទួលអស់ពេលវេលា (ms) |
| ចង្កូតដោយខ្សែ តួ | ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | 0x221 | 20ms | គ្មាន |
| ទិន្នន័យ ប្រវែង | 0x08 | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ [0] បៃ [1] | ចលនា ល្បឿនគឺខ្ពស់ជាង ៨ ប៊ីត ពងមាន់ ល្បឿនគឺទាបជាង ៨ ប៊ីត | ចុះហត្ថលេខា int16 | ល្បឿនជាក់ស្តែង × 1000 (ជាមួយនឹងភាពត្រឹមត្រូវនៃ 0.001m/s) | |
| បៃ [2] បៃ [3] | ល្បឿនបង្វិលគឺខ្ពស់ជាង 8 ប៊ីត ល្បឿនបង្វិលគឺទាបជាង 8 ប៊ីត | ចុះហត្ថលេខា int16 | ល្បឿនជាក់ស្តែង × 1000 (ជាមួយនឹងភាពត្រឹមត្រូវនៃ 0.001rad/s) | |
| បៃ [4] | កក់ទុក | – | 0x00 | |
| បៃ [5] | កក់ទុក | – | 0x00 | |
| បៃ [6] | កក់ទុក | – | 0x00 | |
| បៃ [7] | កក់ទុក | – | 0x00 |
ស៊ុមវត្ថុបញ្ជារួមមានការបើកការត្រួតពិនិត្យល្បឿនលីនេអ៊ែរ ការបើកការត្រួតពិនិត្យល្បឿនមុំ និងការបូកសរុប។ ខ្លឹមសារជាក់លាក់នៃពិធីការត្រូវបានបង្ហាញក្នុងតារាង 3.4 ។
តារាង 3.4 ស៊ុមត្រួតពិនិត្យចលនា
| ឈ្មោះពាក្យបញ្ជា | របៀបគ្រប់គ្រង | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (rns) | ទទួលការអស់ពេល(ms) |
| ការធ្វើសេចក្តីសម្រេច អង្គភាពត្រួតពិនិត្យ | ថ្នាំងតួ | អុក ១៦៥ | 20ms | គ្មាន |
| ប្រវែងទិន្នន័យ | 0x08 | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ||
| បៃ [0] បៃ [1) | ល្បឿនលីនេអ៊ែរគឺខ្ពស់ជាងប្រាំបីប៊ីត ល្បឿនលីនេអ៊ែរ គឺទាបជាងប្រាំបីប៊ីត | ចុះហត្ថលេខា int16 | ល្បឿននៃការផ្លាស់ប្តូររាងកាយរថយន្ត។ ឯកតា៖ mrins, range [-1700,1700] | |
| បៃ [2] បៃ [3] | ល្បឿនមុំគឺប្រាំបីប៊ីត ខ្ពស់ជាងមុំ ល្បឿនគឺប្រាំបីប៊ីត ទាប | ចុះហត្ថលេខា int16 | ល្បឿនមុំនៃការបង្វិលតួរថយន្ត ឯកតា: 0.001 radls ។ ជួរ [- 3140,3140) | |
| បៃ [4] | កក់ទុក | — | អុក ១៦៥ | |
| បៃ [5] | កក់ទុក | — | អុក ១៦៥ | |
| បៃ [6] | កក់ទុក | — | អុក ១៦៥ | |
| បៃ [7] | កក់ទុក | — | អុក ១៦៥ |
ស៊ុមការកំណត់របៀបត្រូវបានប្រើដើម្បីកំណត់ចំណុចប្រទាក់ត្រួតពិនិត្យនៃស្ថានីយ។ ខ្លឹមសារពិធីការជាក់លាក់ត្រូវបានបង្ហាញក្នុងតារាង 3.5
តារាង 3.5 ស៊ុមការកំណត់របៀបបញ្ជា
| ឈ្មោះពាក្យបញ្ជា | បញ្ជាការកំណត់របៀបបញ្ជា | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (ms) | ទទួលការអស់ពេល(ms) |
| ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | តួ ថ្នាំង | 0x421 | 20ms | 500ms |
| ប្រវែងទិន្នន័យ | អុក ១៦៥ | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ (០១ | អាចគ្រប់គ្រងបាន។ បើក | int8 ដែលមិនបានចុះហត្ថលេខា | Ox00 របៀបរង់ចាំ 0x01 អាចបញ្ជា របៀបបើក |
ចំណាំ [1] ការពិពណ៌នាអំពីរបៀបគ្រប់គ្រង
នៅពេលដែលការបញ្ជាពីចម្ងាយរបស់ BUNKERPRO មិនត្រូវបានបើកនោះ របៀបបញ្ជាគឺជារបៀបរង់ចាំតាមលំនាំដើម ហើយអ្នកត្រូវប្តូរវាទៅជារបៀបបញ្ជា ដើម្បីផ្ញើពាក្យបញ្ជាបញ្ជាចលនា។ ប្រសិនបើឧបករណ៍បញ្ជាពីចម្ងាយត្រូវបានបើក ឧបករណ៍បញ្ជាពីចម្ងាយមានសិទ្ធិអំណាចខ្ពស់បំផុត ហើយអាចការពារការគ្រប់គ្រងនៃពាក្យបញ្ជា។ នៅពេលដែលការបញ្ជាពីចម្ងាយត្រូវបានប្តូរទៅរបៀបពាក្យបញ្ជា វានៅតែត្រូវផ្ញើពាក្យបញ្ជាការកំណត់របៀបបញ្ជា មុនពេលឆ្លើយតបទៅនឹងពាក្យបញ្ជាល្បឿន។
ស៊ុមការកំណត់ស្ថានភាពត្រូវបានប្រើដើម្បីជម្រះកំហុសប្រព័ន្ធ។ ខ្លឹមសារពិធីការជាក់លាក់ត្រូវបានបង្ហាញក្នុងតារាង 3.6 ។
តារាង 3.6 ស៊ុមការកំណត់ស្ថានភាព
| ឈ្មោះពាក្យបញ្ជា | ពាក្យបញ្ជាការកំណត់ស្ថានភាព | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (ms) | ទទួលការអស់ពេល |
| ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | ថ្នាំងតួ | 0x441 | គ្មាន | គ្មាន |
| ប្រវែងទិន្នន័យ | 0x01 | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ [0] | កំហុសក្នុងការសម្អាត បញ្ជា | int8 ដែលមិនបានចុះហត្ថលេខា | 0x00 ជម្រះកំហុសទាំងអស់។ 0x01 ជម្រះកំហុសរបស់ម៉ូទ័រ 1 0x02 ជម្រះកំហុសរបស់ម៉ូទ័រ 2 |
ចំណាំ ៣៖ សampទិន្នន័យ; ទិន្នន័យខាងក្រោមគឺសម្រាប់គោលបំណងសាកល្បងតែប៉ុណ្ណោះ
1. យានជំនិះឈានទៅមុខក្នុងល្បឿន 0.15/S
| បៃ [0] | បៃ [1] | បៃ [2] | បៃ [3] | បៃ [4] | បៃ [5] | បៃ [6] | បៃ [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
2. រថយន្តបង្វិលនៅ 0.2RAD/S
| បៃ [0] | បៃ [1] | បៃ [2] | បៃ [3] | បៃ [4] | បៃ [5] | បៃ [6] | បៃ [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
បន្ថែមពីលើព័ត៌មានអំពីស្ថានភាពរបស់តួនឹងត្រូវបានផ្តល់មកវិញ ព័ត៌មានមតិត្រឡប់របស់តួក៏រួមបញ្ចូលទិន្នន័យម៉ូទ័រ និងទិន្នន័យឧបករណ៍ចាប់សញ្ញាផងដែរ។
តារាង 3.7 ល្បឿនម៉ូតូ មតិព័ត៌មានទីតាំងបច្ចុប្បន្ន
| ឈ្មោះពាក្យបញ្ជា | Motor Drive ស៊ុមមតិព័ត៌មានល្បឿនលឿន | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | ទទួលពេលវេលា - ចេញ(ms) | |
| តួដោយខ្សែ | ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | ១៩៨០-១២៨០x៧២០ | 20ms | គ្មាន |
| ទិន្នន័យ ប្រវែង | អុក ១៦៥ | |||
| មុខតំណែង | មុខងារ | – | ការពិពណ៌នា | |
| បៃ [0] បៃ [1] | ល្បឿនម៉ូទ័រគឺខ្ពស់ជាង 8 ប៊ីត ល្បឿនម៉ូទ័រគឺទាបជាង 8 ប៊ីត | ចុះហត្ថលេខា int16 | បច្ចុប្បន្ន ល្បឿនម៉ូទ័រ ឯកតា RPM | |
| បៃ [2] | កក់ទុក | – | អុក ១៦៥ | |
| បៃ [3] | ដ្រាយ សីតុណ្ហភាព គឺ 8 ប៊ីត ទាប | – | ឯកតា 1 t | |
| បៃ [4] | កក់ទុក | – | អុក ១៦៥ | |
| បៃ [5] | ស្ថានភាពដ្រាយ | – | សូមមើលតារាង 3.9 សម្រាប់ព័ត៌មានលម្អិត | |
| បៃ [6] | កក់ទុក | – | អុក ១៦៥ | |
| បៃ [7] | កក់ទុក | – | 0x00 |
តារាង 3.8 សីតុណ្ហភាពម៉ូទ័រ, វ៉ុលtage និង មតិព័ត៌មានស្ថានភាព
| ឈ្មោះពាក្យបញ្ជា | Motor Drive ស៊ុមមតិព័ត៌មានល្បឿនទាប | ||
| ការផ្ញើខ្ញុំទទួលថ្នាំង | ID | វដ្ត :ms) | ទទួលការអស់ពេល(ms) |
| ដឹកនាំដោយ- Dedsion- ការត្រួតពិនិត្យការបង្កើតខ្សែ | ឯកតាតួ ១៩៨០-១២៨០x៧២០ | គ្មាន | គ្មាន |
| ប្រវែងទិន្នន័យ 0x08 | |||
| មុខតំណែង I មុខងារ | ការពិពណ៌នា | ||
| បៃ [0] បៃ [1] | កក់ទុក កក់ទុក | Ox00 0x00 | |
| បៃ [2] បៃ [3] | សីតុណ្ហភាពនៃដ្រាយគឺ 8 ខ្ពស់ជាងនេះ សីតុណ្ហភាពរបស់ដ្រាយគឺទាបជាង 8 ប៊ីត | ចុះហត្ថលេខា int16 | ឯកតា 1 ℃ |
| បៃ [4] | កក់ទុក | អុក ១៦៥ | |
| បៃ [5] | ស្ថានភាពដ្រាយ | int8 ដែលមិនបានចុះហត្ថលេខា | សូមមើលតារាង 3.9 សម្រាប់ព័ត៌មានលម្អិត |
| បៃ [6] | កក់ទុក | – | អុក ១៦៥ |
| បៃ [7] | កក់ទុក | – | 0x00 |
តារាង 3.9 ស្ថានភាពថាស
| បៃ | ប៊ីត | ការពិពណ៌នា |
| បៃ [5] | ប៊ីត [0] | ថាតើវ៉ុលផ្គត់ផ្គង់ថាមពលtage គឺទាបពេក (0: ធម្មតា 1: ទាបពេក) |
| ប៊ីត [1] | ថាតើម៉ូទ័រត្រូវបានកំដៅខ្លាំង (0: ធម្មតា 1: លើសកំដៅ) | |
| ប៊ីត [2] | កក់ទុក | |
| ប៊ីត [3] | កក់ទុក | |
| ប៊ីត [4] | កក់ទុក | |
| ប៊ីត [5] | កក់ទុក | |
| ប៊ីត [6] | កក់ទុក | |
| ប៊ីត [7] | កក់ទុក |
តារាង 3.10 Odometer Feedback Frame
| ឈ្មោះពាក្យបញ្ជា | ស៊ុមមតិប្រតិកម្មព័ត៌មាន Odometer | |||
| កំពុងផ្ញើ ថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (ms) | ទទួលអស់ពេលវេលា (ms) |
| ដឹកនាំដោយ- តួ | ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | 0x311 | 20ms | គ្មាន |
| ប្រវែងទិន្នន័យ | អុក ១៦៥ | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ [0] បៃ [1] បៃ [2] បៃ [3] | ឧបករណ៍វាស់ល្បឿនកង់ខាងឆ្វេងខ្ពស់បំផុតទីពីរ - ប៊ីតខ្ពស់បំផុតទីពីរនៃ odometer កង់ខាងឆ្វេង ប៊ីតទាបបំផុតទីពីរ នៃ odometer កង់ខាងឆ្វេង តិចបំផុតនៃ odometer កង់ខាងឆ្វេង | ចុះហត្ថលេខា int32 | ឯកតាមតិត្រឡប់ odometer កង់ខាងឆ្វេងរបស់តួ៖ mm | |
| បៃ [4] បៃ [5] បៃ [6] បៃ 17) | សិទ្ធិខ្ពស់បំផុត ឧបករណ៍វាស់ចម្ងាយកង់ ប៊ីតខ្ពស់បំផុតទីពីរ នៃ odometer កង់ស្តាំទីពីរ - ប៊ីតទាបបំផុតនៃ odometer កង់ស្តាំ ខាងស្តាំទាបបំផុត។ ឧបករណ៍វាស់ចម្ងាយកង់ | ចុះហត្ថលេខា int32 ឯកតា៖ ម។ | ឧបករណ៍វាស់ចម្ងាយកង់ខាងស្តាំរបស់តួ មតិកែលម្អ |
តារាង 3.11 មតិប្រតិកម្មព័ត៌មានអំពីការគ្រប់គ្រងពីចម្ងាយ
| ឈ្មោះពាក្យបញ្ជា | ព័ត៌មានបញ្ជាពីចម្ងាយ | |||
| កំពុងផ្ញើថ្នាំង | ថ្នាំងទទួល | ID | វដ្ត (ms / | ទទួលការអស់ពេល (ms) |
| ចង្កូតដោយខ្សែ តួ | ការសម្រេចចិត្ត អង្គភាពត្រួតពិនិត្យ | 0x241 | 20ms | គ្មាន |
| ទិន្នន័យ ប្រវែង | 0x08 | |||
| មុខតំណែង | មុខងារ | ប្រភេទទិន្នន័យ | ការពិពណ៌នា | |
| បៃ [0] | ការបញ្ជាពីចម្ងាយ SW មតិកែលម្អ | int8 ដែលមិនបានចុះហត្ថលេខា | ប៊ីត[0-1]៖ SWA 2-ឡើង 3-ចុះ bit[2-3]៖ SWB៖ 2-Up 1-Middle 3-Down bit14-51: SWC: 2-Up 1-Middle 3-Down bit[6-71: SWD: 2-Up 3-Down | |
| hY1e [1] | ដៃចង្កូតស្តាំឆ្វេង ក | ចុះហត្ថលេខា int8 | ជួរ៖ (-100.100) | |
| បៃ [2] | ដៃចង្កូតស្តាំឆ្វេងស្តាំ | ចុះហត្ថលេខា int8 | ជួរ៖[-100.100] | |
| បៃ [3] | ដៃឆ្វេងឡើងលើចុះក្រោម | ចុះហត្ថលេខា int8 | ជួរ៖ (-100.100] | |
| បៃ [4] | ដៃចង្កូតឆ្វេងឆ្វេងស្តាំ | ចុះហត្ថលេខា int8 | ជួរ៖ (-100.100] | |
| បៃ ISI | ប៊ូតុងខាងឆ្វេង VRA | ចុះហត្ថលេខា int8 | ជួរ៖ (-100.100) | |
| បៃ [6] | កក់ទុក | — | 0x00 | |
| បៃ (០១ | ពិនិត្យរាប់ | int8 ដែលមិនបានចុះហត្ថលេខា | 0-255 ចំនួនវដ្ត |
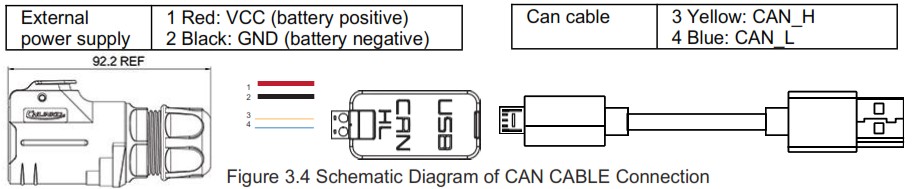
ការភ្ជាប់ខ្សែ CAN
BUNKERPRO ត្រូវបានបញ្ជូនមកជាមួយឧបករណ៍ភ្ជាប់បុរសដោតអាកាសចរណ៍ដូចបង្ហាញក្នុងរូបភាព 3.2 ។ និយមន័យនៃខ្សែ៖ ពណ៌លឿងគឺ CANH ពណ៌ខៀវគឺ CANL ពណ៌ក្រហមគឺជាថាមពលវិជ្ជមាន ហើយពណ៌ខ្មៅគឺជាថាមពលអវិជ្ជមាន។
ចំណាំ៖ នៅក្នុងកំណែ BUNKERPRO បច្ចុប្បន្ន ចំណុចប្រទាក់ផ្នែកបន្ថែមខាងក្រៅគឺបើកតែផ្នែកខាងក្រោយប៉ុណ្ណោះ។ នៅក្នុងកំណែនេះការផ្គត់ផ្គង់ថាមពលអាចផ្តល់ចរន្តអតិបរមា 10A ។

ការសម្រេចបាននូវការគ្រប់គ្រងពាក្យបញ្ជា CAN
ចាប់ផ្តើមតួមនុស្សយន្តចល័ត BUNKERPRO ជាធម្មតា បើកការបញ្ជាពីចម្ងាយ FS ហើយបន្ទាប់មកប្តូររបៀបបញ្ជាទៅការគ្រប់គ្រងពាក្យបញ្ជា ពោលគឺបង្វែរការជ្រើសរើសរបៀប SWB របស់ឧបករណ៍បញ្ជាពីចម្ងាយ FS ទៅខាងលើ។ នៅពេលនេះ តួ BUNKERPRO នឹងទទួលយកពាក្យបញ្ជាពីចំណុចប្រទាក់ CAN ហើយម៉ាស៊ីនក៏អាចវិភាគស្ថានភាពបច្ចុប្បន្ននៃតួតាមរយៈទិន្នន័យពេលវេលាពិតដែលផ្តល់មកវិញដោយរថយន្តក្រុង CAN ក្នុងពេលតែមួយ។ សូមមើលពិធីការទំនាក់ទំនង CAN សម្រាប់មាតិកាពិធីការជាក់លាក់។
អាប់ដេតកម្មវិធីបង្កប់ (មិនទាន់បើក)
ដើម្បីជួយសម្រួលដល់អ្នកប្រើប្រាស់ក្នុងការអាប់ដេតកំណែកម្មវិធីបង្កប់ដែលប្រើដោយ BUNKERPRO និងនាំមកជូនអតិថិជននូវបទពិសោធន៍ពេញលេញជាងមុន BUNKERPRO ត្រូវបានផ្តល់ជូនជាមួយនឹងចំណុចប្រទាក់ផ្នែករឹងសម្រាប់ការអាប់ដេតកម្មវិធីបង្កប់ និងកម្មវិធីអតិថិជនដែលត្រូវគ្នា។ ចំណុចប្រទាក់អតិថិជនត្រូវបានបង្ហាញក្នុងរូបភាព 3.3 ។
ធ្វើឱ្យប្រសើរឡើងនូវការរៀបចំ
- ខ្សែសៀរៀល X ១
- USB ទៅច្រកសៀរៀល X 1
- តួ BUNKERPRO X ១
- កុំព្យូទ័រ (ប្រព័ន្ធប្រតិបត្តិការ WINDOWS) X ១
កម្មវិធីដំឡើងកំណែកម្មវិធីបង្កប់ - https://github.com/agilexrobotics/agilex_firmware
- ត្រូវប្រាកដថាការផ្គត់ផ្គង់ថាមពលរបស់តួមនុស្សយន្តត្រូវបានផ្តាច់មុនពេលភ្ជាប់។
- ប្រើខ្សែសៀរៀលដើម្បីភ្ជាប់ទៅ BUNKERPRO chassis upgrade port serial (តម្រូវឱ្យផ្តាច់បន្ទះអគ្គិសនីខាងក្រោយ); ភ្ជាប់ខ្សែសៀរៀលទៅកុំព្យូទ័រ;
- បើកកម្មវិធីអតិថិជន;
- ជ្រើសរើសលេខច្រក;
- បើកថាមពលលើតួ UNKERPRO ហើយចុច "ចាប់ផ្តើមការតភ្ជាប់" ភ្លាមៗ (តួនឹងរង់ចាំ 3S មុនពេលបើកភ្លើង ប្រសិនបើពេលវេលាលើសពី 6S វានឹងចូលក្នុងកម្មវិធី) ។ ប្រសិនបើការតភ្ជាប់បានជោគជ័យ ប្រអប់អត្ថបទនឹងសួរថា "បានភ្ជាប់ដោយជោគជ័យ"។
- ផ្ទុកធុង file;
- ចុចប៊ូតុងដំឡើងកំណែ ហើយរង់ចាំការបញ្ចប់ការដំឡើងកំណែ។
- ផ្តាច់ខ្សែសៀរៀល បិទតួ ហើយបើកភ្លើងម្តងទៀត។

រូបភាព 3.3 ចំណុចប្រទាក់អតិថិជននៃការដំឡើងកម្មវិធីបង្កប់
កញ្ចប់ BUNKERPRO ROS ប្រើ Example
ROS ផ្តល់សេវាកម្មប្រព័ន្ធប្រតិបត្តិការស្តង់ដារមួយចំនួន ដូចជាការអាប់ដេតផ្នែករឹង ការគ្រប់គ្រងឧបករណ៍កម្រិតទាប ការអនុវត្តមុខងារទូទៅ សារអន្តរដំណើរការ និងការគ្រប់គ្រងកញ្ចប់ទិន្នន័យ។ ROS គឺផ្អែកលើស្ថាបត្យកម្មក្រាហ្វ ដូច្នេះដំណើរការនៃថ្នាំងផ្សេងៗគ្នាអាចទទួល បញ្ចេញ និងប្រមូលផ្តុំព័ត៌មានផ្សេងៗ (ដូចជា ការចាប់សញ្ញា ការគ្រប់គ្រង ស្ថានភាព ការធ្វើផែនការ។ល។)។ បច្ចុប្បន្ន ROS គាំទ្រ UBUNTU ជាចម្បង។
ការរៀបចំអភិវឌ្ឍន៍
ការរៀបចំផ្នែករឹង
- ពន្លឺអាចទំនាក់ទំនងម៉ូឌុល X1
- Think pad E470 notebook X1 AGILEX BUNKERPRO mobile robot chassis X1
- AGILEX BUNKERPRO គាំទ្រការបញ្ជាពីចម្ងាយ FS-i6s X1
- រន្ធអាកាសចរណ៍កំពូល AGILEX BUNKERPRO X1
ប្រើឧampការពិពណ៌នាអំពីបរិស្ថាន
- អ៊ូប៊ុនទូ 16.04 LTS (នេះគឺជាកំណែសាកល្បង សាកល្បងលើអ៊ូប៊ុនទូ 18.04 LTS)
- ROS Kinetic (កំណែបន្ទាប់ក៏ត្រូវបានសាកល្បងផងដែរ)
- ហ្គីត
ការភ្ជាប់និងការរៀបចំផ្នែករឹង
- នាំខ្សែ CAN នៃដោតអាកាសចរណ៍កំពូល BUNKERPRO ឬដោតកន្ទុយ ហើយភ្ជាប់ CAN_H និង CAN_L ក្នុងខ្សែ CAN ទៅអាដាប់ទ័រ CAN_TO_USB រៀងៗខ្លួន។
- បើកប៊ូតុងបិទបើកនៅលើតួមនុស្សយន្តចល័ត BUNKERPRO ហើយពិនិត្យមើលថាតើកុងតាក់ឈប់សង្គ្រោះបន្ទាន់នៅលើភាគីទាំងពីរត្រូវបានបញ្ចេញឬអត់។
- ភ្ជាប់ CAN_TO_USB ទៅចំណុចប្រទាក់ usb នៃសៀវភៅកត់ត្រា។ ដ្យាក្រាមតភ្ជាប់ត្រូវបានបង្ហាញក្នុងរូបភាព 3.4 ។
ការដំឡើង ROS និងការកំណត់បរិស្ថាន
សម្រាប់ព័ត៌មានលម្អិតអំពីការដំឡើង សូមមើល http://wiki.ros.org/kinetic/Installa-tion/Ubuntu
សាកល្បងផ្នែករឹង CANABLE និងការទំនាក់ទំនង CAN
កំណត់អាដាប់ទ័រ CAN-TO-USB
- បើកម៉ូឌុលខឺណែល gs_usb $ sudo modprobe gs_usb
- កំណត់អត្រា baud 500k និងបើកអាដាប់ទ័រ can-to-usb $ sudo ip link set can0 up type can bitrate 500000
- ប្រសិនបើគ្មានកំហុសកើតឡើងក្នុងជំហានមុនទេ អ្នកគួរតែអាចប្រើពាក្យបញ្ជាទៅ view ឧបករណ៍កំប៉ុងភ្លាមៗ $ ifconfig -a
- ដំឡើង និងប្រើប្រាស់ can-utils ដើម្បីសាកល្បង hardware $ sudo apt install can-utils
- ប្រសិនបើ can-to-usb ត្រូវបានភ្ជាប់ទៅមនុស្សយន្ត BUNKERPRO នៅពេលនេះ ហើយរថយន្តត្រូវបានបើក សូមប្រើពាក្យបញ្ជាខាងក្រោមដើម្បីតាមដានទិន្នន័យពីតួ BUNKERPRO $ candump can0
- ប្រភពឯកសារយោង៖
[1]https://github.com/agilexrobotics/agx_sdk
[2]https://wiki.rdu.im/_pages/Notes/Embed-dedSystem/Linux/can-bus-in-linux.html - ទាញយកកញ្ចប់ Ros Dependent
AGILEX BUNKERPRO ROS PACKAGE ទាញយក និងចងក្រង
$ sudo apt ដំឡើង ros-$ROS_DISTRO-teleop-twist-key- board
$ sudo apt ដំឡើង libasio-dev
• ក្លូន និងចងក្រងកូដប្រភព bunker_ros
$ cd ~/catkin_ws/src
$ git ក្លូន https://github.com/agilexrobotics/ugv_sdk.git
$ git ក្លូន https://github.com/agilexrobotics/bunker_ros.git
$ ស៊ីឌី ..
$ catkin_make
ប្រភពឯកសារយោង៖
https://github.com/agilexrobotics/bunker_ros
ចាប់ផ្តើមថ្នាំង ROS
- ចាប់ផ្តើមថ្នាំងមូលដ្ឋាន
$roslaunch bunker_bringup bunker_minimal.launch - ចាប់ផ្តើមថ្នាំងប្រតិបត្តិការពីចម្ងាយក្តារចុច
$roslaunch bunker_bringup bunker_teleop_keyboard.launch
ការប្រុងប្រយ័ត្នជាមុន
ផ្នែកនេះមានការប្រុងប្រយ័ត្នមួយចំនួនសម្រាប់ការប្រើប្រាស់ និងអភិវឌ្ឍ BUNKERPRO ។
ការប្រុងប្រយ័ត្នថ្ម
- នៅពេលដែល BUNKERPRO ចាកចេញពីរោងចក្រ ថ្មមិនត្រូវបានសាកពេញទេ។ ថាមពលថ្មជាក់លាក់អាចត្រូវបានបង្ហាញតាមរយៈវ៉ុលtagអ៊ីបង្ហាញម៉ែត្រនៅលើតួ BUNKERPRO ខាងក្រោយ ឬអានតាមរយៈចំណុចប្រទាក់ទំនាក់ទំនងរថយន្តក្រុង CAN;
- សូមកុំសាកថ្មបន្ទាប់ពីថាមពលរបស់វាអស់។ សូមសាកវាក្នុងពេលដែលវ៉ុលទាបtage នៅខាងក្រោយ BUNKERPRO គឺទាបជាង 48V; លក្ខខណ្ឌផ្ទុកឋិតិវន្ត៖ សីតុណ្ហភាពល្អបំផុតសម្រាប់ការផ្ទុកថ្មគឺ -10°C ~ 45°C; ក្នុងករណីការផ្ទុកមិនប្រើ ថ្មត្រូវតែបញ្ចូលឡើងវិញ និងរំសាយចេញម្តងរៀងរាល់ 1 ខែម្តង ហើយបន្ទាប់មករក្សាទុកក្នុងវ៉ុលពេញ។tagរដ្ឋ។ សូមកុំដាក់ថ្មនៅក្នុងភ្លើង ឬកំដៅថ្ម ហើយសូមកុំទុកថ្មក្នុងបរិយាកាសដែលមានសីតុណ្ហភាពខ្ពស់។
- ការសាកថ្ម៖ ថ្មត្រូវតែសាកជាមួយនឹងឆ្នាំងសាកថ្មលីចូម។ កុំសាកថ្មក្រោម 0°C ហើយកុំប្រើថ្ម ការផ្គត់ផ្គង់ថាមពល និងឆ្នាំងសាកដែលមិនមានស្តង់ដារ។
ការប្រុងប្រយ័ត្នសម្រាប់បរិស្ថានប្រតិបត្តិការ
- សីតុណ្ហភាពប្រតិបត្តិការរបស់ BUNKERPRO គឺ 20 ℃ ~ 60 ℃; សូមកុំប្រើវានៅក្នុងបរិស្ថានដែលមានសីតុណ្ហភាពទាបជាង 20 ℃ឬខ្ពស់ជាង 60 ℃;
- តម្រូវការសំណើមដែលទាក់ទងនៃបរិយាកាសប្រតិបត្តិការរបស់ BUNKERPRO គឺ: អតិបរមា 80%, អប្បបរមា 30%;
- សូមកុំប្រើវានៅក្នុងបរិយាកាសដែលមានឧស្ម័នដែលងាយឆេះ និងងាយឆេះ ឬក្នុងបរិយាកាសជិតសារធាតុងាយឆេះ។
- កុំទុកវានៅជុំវិញធាតុកំដៅ ដូចជាឧបករណ៍កម្តៅ ឬឧបករណ៍ទប់ទល់ដែលមានខ្សែធំ។
- វាត្រូវបានផ្ដល់អនុសាសន៍ថាកម្ពស់នៃបរិស្ថានប្រតិបត្តិការមិនគួរលើសពី 1000M; វាត្រូវបានណែនាំថាភាពខុសគ្នានៃសីតុណ្ហភាពរវាងថ្ងៃនិងយប់នៅក្នុងបរិយាកាសប្រតិបត្តិការមិនគួរលើសពី 25 ° C ។
- ត្រួតពិនិត្យ និងថែទាំកង់ផ្លូវដែកជាប្រចាំ។
ការប្រុងប្រយ័ត្នសម្រាប់ផ្នែកបន្ថែមអគ្គិសនីខាងក្រៅ
- ចរន្តនៃការផ្គត់ផ្គង់ថាមពលផ្នែកបន្ថែមខាងក្រោយមិនគួរលើសពី 10A ហើយថាមពលសរុបមិនគួរលើសពី 480W;
ការប្រុងប្រយ័ត្នសុវត្ថិភាព
- ក្នុងករណីមានការសង្ស័យណាមួយក្នុងអំឡុងពេលប្រើប្រាស់ សូមធ្វើតាមការណែនាំដែលពាក់ព័ន្ធ ឬពិគ្រោះជាមួយបុគ្គលិកបច្ចេកទេសពាក់ព័ន្ធ។
- មុនពេលប្រើប្រាស់ ត្រូវយកចិត្តទុកដាក់លើស្ថានភាពវាល និងជៀសវាងប្រតិបត្តិការខុសដែលនឹងបង្កឱ្យមានបញ្ហាសុវត្ថិភាពបុគ្គលិក។
- ក្នុងករណីមានអាសន្ន សូមចុចប៊ូតុងឈប់សង្គ្រោះបន្ទាន់ ហើយបិទឧបករណ៍។
- បើគ្មានការគាំទ្រផ្នែកបច្ចេកទេស និងការអនុញ្ញាតទេ សូមកុំកែប្រែរចនាសម្ព័ន្ធឧបករណ៍ខាងក្នុងផ្ទាល់ខ្លួន។
ការប្រុងប្រយ័ត្នផ្សេងទៀត។
- កុំទម្លាក់ ឬដាក់យានជំនិះ ពេលដែលដឹក និងដំឡើង។
- សម្រាប់អ្នកមិនជំនាញសូមកុំរុះរើរថយន្តដោយគ្មានការអនុញ្ញាត។
សំណួរ និងចម្លើយ
- ជាដំបូង បញ្ជាក់ថាតើកុងតាក់ថាមពលត្រូវបានចុចឬអត់។ ហើយបន្ទាប់មក បញ្ជាក់ថាតើរបៀបបញ្ជាដែលបានជ្រើសរើសតាមរយៈកុងតាក់ជ្រើសរើសរបៀបនៅផ្នែកខាងឆ្វេងខាងលើនៃឧបករណ៍បញ្ជាពីចម្ងាយគឺត្រឹមត្រូវ។
- នៅក្រោមកាលៈទេសៈធម្មតា ប្រសិនបើ BUNKERPRO អាចត្រូវបានគ្រប់គ្រងដោយឧបករណ៍បញ្ជាពីចម្ងាយ វាមានន័យថាការគ្រប់គ្រងចលនារបស់តួគឺធម្មតា។ ប្រសិនបើវាអាចទទួលបានស៊ុមមតិត្រឡប់របស់តួ វាមានន័យថាតំណភ្ជាប់ផ្នែកបន្ថែម CAN គឺធម្មតា។ សូមពិនិត្យមើលថាតើពាក្យបញ្ជាត្រូវបានប្តូរទៅជារបៀបគ្រប់គ្រង។
- BUNKERPRO មានយន្តការការពារទំនាក់ទំនងនៅខាងក្នុង។ តួមានយន្តការការពារអស់ពេលពេលដំណើរការ CAN control commands ពីខាងក្រៅ។ ឧបមាថាបន្ទាប់ពីរថយន្តទទួលបានស៊ុមនៃពិធីការទំនាក់ទំនង ប៉ុន្តែវាមិនទទួលបានស៊ុមបន្ទាប់នៃពាក្យបញ្ជាលើសពី 500MS វានឹងចូលទៅក្នុងការការពារទំនាក់ទំនង ហើយល្បឿនរបស់វាគឺ 0 ដូច្នេះហើយ ពាក្យបញ្ជាពីម៉ាស៊ីនកុំព្យូទ័រត្រូវតែ ចេញឱ្យទៀងទាត់។
វិមាត្រផលិតផល
ដ្យាក្រាមរូបភាពនៃទំហំផលិតផល


ដ្យាក្រាមរូបភាពនៃវិមាត្រជំនួយពង្រីកកំពូល

AgileX Robotics (Dongguan) CO., Ltd.
WWW.AGILEX.AI
លេខទូរស័ព្ទ៖ + ៨៦-៥០៣៧-២២៨៨១២៨
ទូរស័ព្ទ៖ +86-19925374409

ឯកសារ/ធនធាន
 |
AgileX Bunker Pro បានតាមដានមនុស្សយន្តចល័ត [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ Bunker Pro បានតាមដានមនុស្សយន្តចល័ត, Bunker Pro, តាមដានមនុស្សយន្តចល័ត, មនុស្សយន្តចល័ត |



