Netzer Precision VLP-247 Hollow Shaft Rotary Encoder Kit Encoder
Mga detalye
- Angular nga resolusyon: 18-20 gamay
- Nominal nga pagkatukma sa posisyon: ±0.006°
- Maximum nga operational speed: 4,000 rpm
- Sakup sa pagsukod: Usa ka turno, walay kutub
- direksyon sa rotation: Adjustable CW/CCW*
- Gitukod sa Test BIT: Opsyonal
- * Default parehas nga direksyon gikan sa ubos nga bahin sa encoder
Impormasyon sa Produkto
Ang VLP-247 Absolute Hollow Shaft Rotary Encoder Kit Encoder usa ka precision encoder nga gidisenyo alang sa mapintas nga mga aplikasyon sa palibot. Pinasukad sa capacitive nga teknolohiya nga gihimo sa Netzer Precision Position Sensors, kini nga encoder gitukod aron matubag ang mga kinahanglanon sa gipangayo nga mga aplikasyon.
Mga Instruksyon sa Paggamit sa Produkto
Mekanikal nga Pagsakay
Tan-awa ang seksyon sa Mechanical Mounting sa manwal sa paggamit alang sa detalyado nga mga panudlo sa pag-mount sa encoder. Sunda ang End-of-Shaft Installation guidelines para sa saktong instalasyon.
Operasyon nga Mode
Ang encoder naglihok sa SSi / BiSS mode. Palihug tan-awa ang manwal sa paggamit alang sa piho nga mga panudlo sa pag-configure ug pag-operate sa encoder sa kini nga mga mode.
FAQ
- Q: Unsa ang pinakataas nga operational speed sa VLP-247 encoder?
A: Ang pinakataas nga tulin sa operasyon sa VLP-247 encoder mao ang 4,000 rpm. - P: Unsa ka dugay ang capacitive nga teknolohiya gigamit sa VLP gi-develop ang serye?
A: Ang capacitive nga teknolohiya nga gigamit sa serye sa VLP naugmad ug gipauswag sa kapin sa 20 ka tuig pinaagi sa Netzer Precision Position Sensors.
Pasiuna sa VLP Encoders
Gidisenyo aron matubag ang mga kinahanglanon sa labing gipangayo nga mga aplikasyon
Ang serye sa VLP sa Electric Encoders ™ usa ka linya sa mga encoder nga gidisenyo alang sa mapintas nga mga aplikasyon sa palibot. Kini nga mga encoder gibase sa capacitive nga teknolohiya nga naugmad ug gipauswag sa sobra sa 20 ka tuig pinaagi sa Netzer Precision Position Sensors.
Ang mga encoder sa VLP gihulagway pinaagi sa mga musunod nga bahin nga nagpalahi kanila gikan sa ubang parehas nga mga encoder:
- Ubos nga profile
- Hollow shaft (Stator / Rotor)
- Walay mga bearings o uban pang mga elemento sa kontak
- Taas nga resolusyon ug maayo kaayo nga katukma
- Ang resistensya sa magnetic field
- Taas nga pagtugot sa sobra nga temperatura, shock, kaumog, EMI, RFI
- Ubos kaayo nga gibug-aton
- Holistic signal generation ug sensing
- Digital nga mga interface alang sa hingpit nga posisyon
Ang holistic nga istruktura sa VLP Electric Encoder ™ naghimo niini nga talagsaon. Ang output nga pagbasa niini mao ang average nga resulta sa tibuok sirkumperensiya nga dapit sa rotor. Kini nga kinaiyanhon nga kinaiya sa disenyo naghatag sa VLP encoder nga adunay talagsaon nga katukma ingon man usa ka tolerant nga mekanikal nga pag-mount. Ang pagkawala sa mga sangkap sama sa ball bearings, flexible couplers, glass discs, light sources & detectors, uban sa ubos kaayo nga konsumo sa kuryente, makapahimo sa VLP encoders nga makahatag ug halos walay kapakyasan nga performance.
Teknikal nga Detalye
Heneral
| Angular nga resolusyon | 18-20 gamay |
| Nominal nga pagkatukma sa posisyon | ±0.006° |
| Maximum nga operational speed | 4,000 rpm |
| Sakup sa pagsukod | Usa ka turno, walay kutub |
| Direksyon sa rotation | Adjustable CW/CCW* |
| Gitukod sa Test BIT | Opsyonal |
* Default parehas nga direksyon gikan sa ubos nga bahin sa encoder
Mekanikal
| Gitugotan nga mounting eccentricity | ±0.1 mm |
| Gitugotan nga axial mounting tolerance | ±0.3 mm |
| Inertia sa rotor | 876,053 gr · mm2 |
| Kinatibuk-ang gibug-aton | 220 gr |
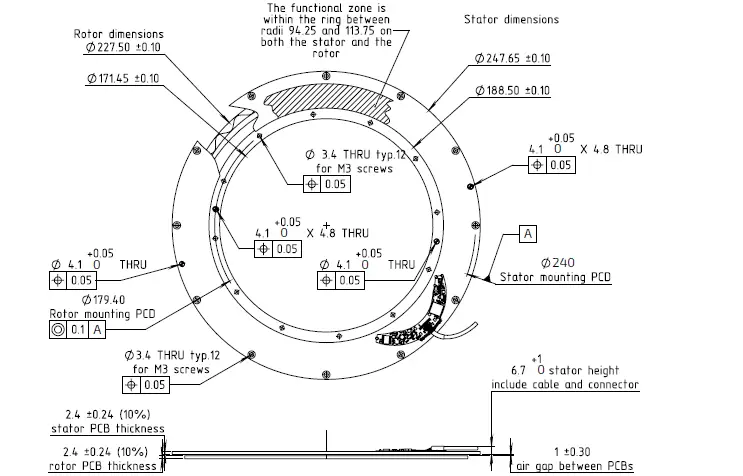
| Sa gawas Ø / Sulod Ø / Taas | 247/171/9 mm |
| Materyal (stator / rotor) | FR4 |
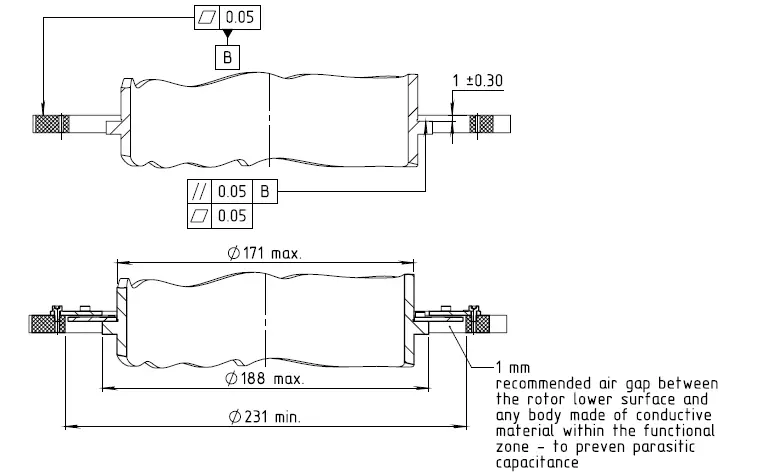
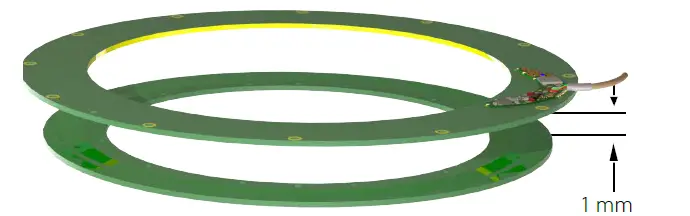
| Nominal air gap (stator, rotor) | 1 mm |
Elektrisidad
| Paghatag voltage | 5V ± 5% |
| Kasamtangang konsumo | ~90 mA |
| Interkoneksyon | Cable (standard 250mm) |
| Komunikasyon | SSi, BiSS-C |
| Serial nga output | Nagkalainlain nga RS-422 |
| Frequency sa orasan | 0.1-5.0 MHz |
| Rate sa pag-update sa posisyon | 35 kHz (Opsyonal – hangtod sa 375 kHz) |
Kinaiyahan
| EMC | IEC 6100-6-2, IEC 6100-6-4 |
| Operating temperatura | -40°C hangtod sa +105°C |
| Temperatura sa pagtipig | -55°C hangtod sa +125°C |
| Relatibong humidity | 98% Dili condensing |
| Shock paglahutay / functional | 100g 6msec saw-tooth kada IEC 60068-2-27:2009 40g 11msec saw-tooth kada MIL-810G |
| Naglihok ang vibration | 7.7grms @ 20 ngadto sa 2000 Hz kada MIL-810G Category 24 |
| Proteksyon | IP 40 |
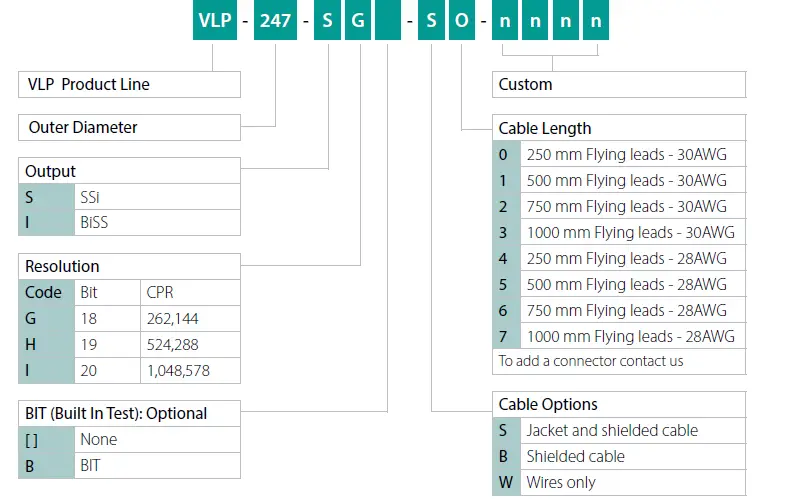
Kodigo sa Pag-order
Mga Dibuho sa Mekanikal
Gawas kon gipiho
- Ang mga dimensyon anaa sa: mm Surface finish: N6
Linear nga pagtugot
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Mechanical Interface Control Drawing
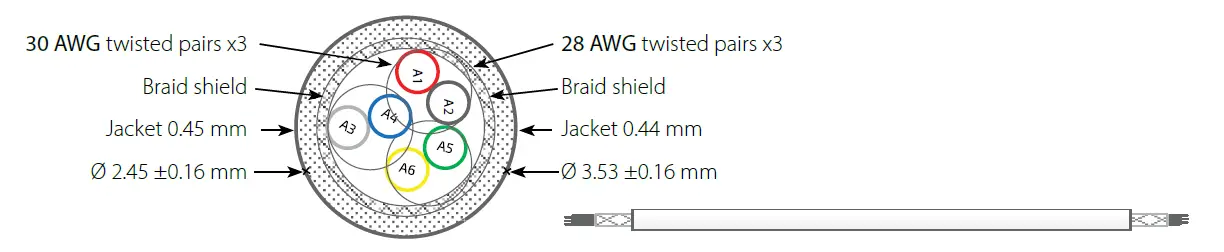
Mga kapilian sa cable
| Netzer Cat No. | CB 00014 | CB 00034 |
| Uri sa kable | 30 AWG twisted pair x 3 | 28 AWG twisted pair x 3 |
| Uri sa wire | 2 x 30 AWG 25/44 lata nga tumbaga Insulasyon: PFE Ø 0.15 OD: Ø 0.6 ± 0.05 mm |
2 x 30 AWG 40/44 lata nga tumbaga Insulasyon: PFE Ø 0.12 OD: Ø 0.64 ± 0.05 mm |
| Temp. Rating | -55°C hangtod sa +150°C | |
| Sinapid nga taming | Nipis nga tumbaga nga sinapid 95% min. coverage | |
| Jacket | 0.45 silicon nga goma (NFA 11-A1) | 0.44 silicon nga goma (NFA 11-A1) |
| Diametro | Ø 2.45 ± 0.16 mm | Ø 3.53 ± 0.16 mm |
Pagtipig ug Pagdumala
- Temperatura sa pagtipig: -55°C hangtod sa +125°C
- Humidity: Hangtod sa 98% nga dili pag-condensing
Proteksyon sa ESD
Sama sa naandan alang sa mga elektronik nga sirkito, sa panahon sa pagdumala sa produkto ayaw paghikap sa mga elektronik nga sirkito, wire, konektor o sensor nga wala’y angay nga proteksyon sa ESD. Ang integrator / operator kinahanglan nga mogamit sa ESD nga kagamitan aron malikayan ang peligro sa kadaot sa sirkito.
 ATTENTION OBSERBA ANG MGA PANGINGANA ALANG SA PAGDUMALA SA MGA ELECTROSTATIC SNSITIVE DEVICES
ATTENTION OBSERBA ANG MGA PANGINGANA ALANG SA PAGDUMALA SA MGA ELECTROSTATIC SNSITIVE DEVICES
Natapos ang Produktoview
Tapos naview
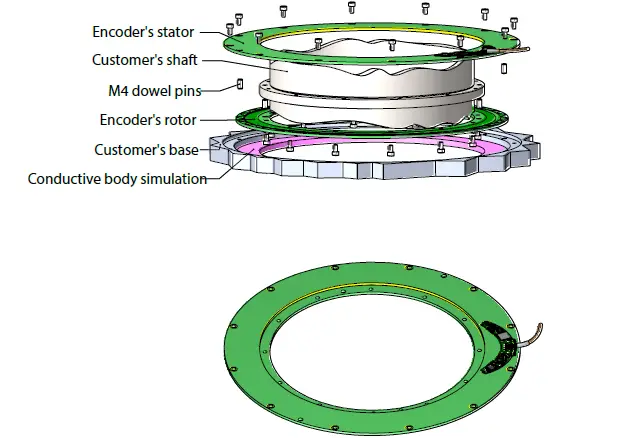
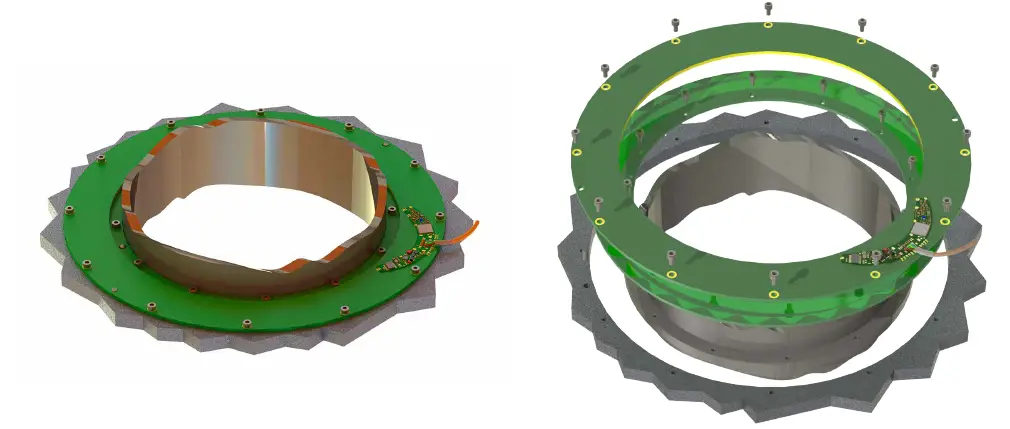
Ang VLP-247 absolute position Electric Encoder ™ kay usa ka rotary position sensor nga gimugna para sa mga demanda nga aplikasyon. Sa pagkakaron kini naghimo sa usa ka halapad nga mga aplikasyon, lakip ang depensa, seguridad sa yutang natawhan, medikal nga robotics ug industriyal nga automation. Ang Electric Encoder ™ non-contact nga teknolohiya naghatag ug tukma nga pagsukod sa posisyon pinaagi sa modulasyon sa usa ka electric field. Ang VLP-247 Electric Encoder™ kay usa ka kit-encoder, ie, ang rotor ug stator niini managlahi.
- Encoder stator
- Rotor sa encoder
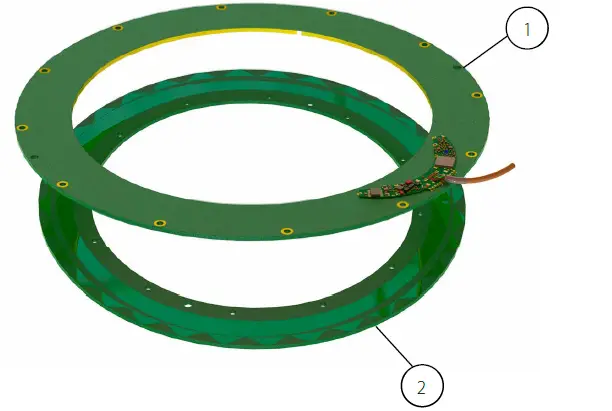
Pag-unpack – standard order
Ang pakete sa standard VLP-247 naglangkob sa encoder Stator & Rotor.
Opsyonal nga mga aksesorya:
- CNV-0003, RS-422 ngadto sa USB converter (uban ang USB internal 5V power supply path).
- NanoMIC-KIT-01, RS-422 ngadto sa USB converter. Setup & Operational mode pinaagi sa SSi / BiSS interface.
- RJ VLP-247 rotary jig
- DKIT-VLP-247-SG-S0, Naka-mount SSi encoder sa rotary jig, RS-422 sa USB converter ug mga kable.
- DKIT-VLP-247-IG-S0, Naka-mount BiSS encoder sa rotary jig, RS-422 sa USB converter ug mga kable.
Pag-instalar sa flow chart
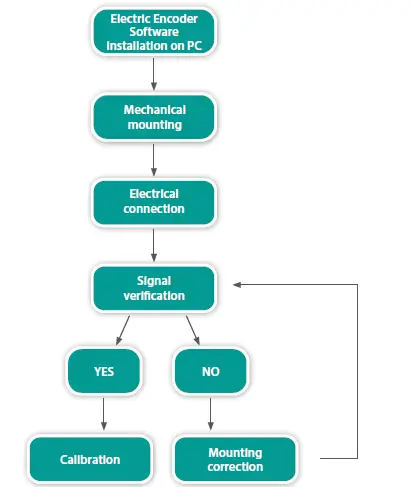
Pag-instalar sa Electric Encoder Software
Ang Electric Encoder Explorer (EEE) software:
- Gipamatud-an ang husto nga pag-mount alang sa usa ka igong signal ampkamingaw
- Pag-calibrate sa mga offset
- Kinatibuk-ang set up ug signal analysis
Kini nga seksyon naghulagway sa mga lakang nga nalangkit sa pag-instalar sa EEE software application.
Minimum nga mga kinahanglanon
- Operating system: MS windows 7/10, (32/64 bit)
- Memorya: 4MB minimum
- Mga pantalan sa komunikasyon: USB 2
- Windows .NET Framework, minimum nga V4
Pag-instalar sa software
- Pagdalagan ang Electric Encoder™ Explorer file makita sa Netzer website: Encoder Explorer Software Tools
- Human sa pag-instalar imong makita ang Electric Encoder Explorer software icon sa computer desktop.
- I-klik ang Electric Encoder Explorer software icon aron magsugod.
Mekanikal nga Pagsakay
Pag-mount sa encoder - Pag-instalar sa End-of-Shaft
Kasagaran nga paggamit sa pag-instalar sa encoder
- Mounting screws Socket Head Cup Screw 12xM2, 6 matag stator & rotor.
- Pag-mount dowel pin 4xØ2, 2 matag stator & rotor (wala gilakip sa encoder).
Encoder stator / Rotor paryente nga posisyon
Alang sa husto nga pasundayag ang gintang sa hangin kinahanglan nga 1 mm ± 0.3 mm
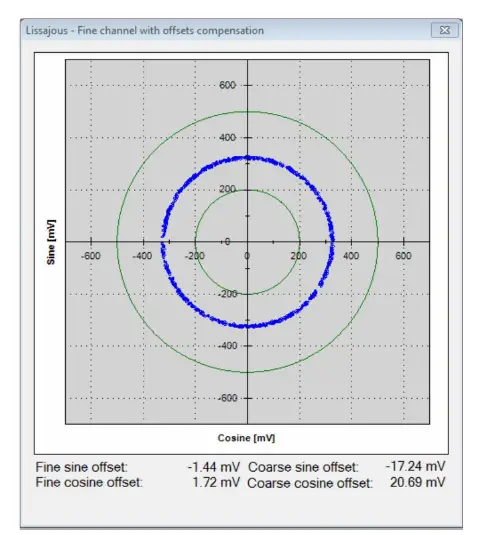
Sa usa ka kamalaumon nga pag-mount, ang signal amplitude values nga namugna sa encoder, anaa sa tunga-tunga sa range sa signal plot nga gipakita sa Encoder Explorer software (tan-awa ang plot sa ubos). Kini mahimong magkalahi sumala sa matang sa encoder. I-verify ang husto nga pag-mount sa rotor gamit ang mga tool sa Encoder Explorer nga "Signal analyzer" o "Proseso sa pag-verify sa signal."
Mubo nga sulat: para sa dugang nga impormasyon palihog basaha ang seksyon 7
Koneksyon sa Elektrikal
Kini nga kapitulo reviews ang mga lakang nga gikinahanglan aron makonektar sa kuryente ang encoder gamit ang digital interface (SSi o BiSS-C).
Pagkonektar sa encoder
Ang encoder adunay duha ka mga mode sa operasyon:
Hingpit nga posisyon sa SSi o BiSS-C
Kini ang power-up default mode
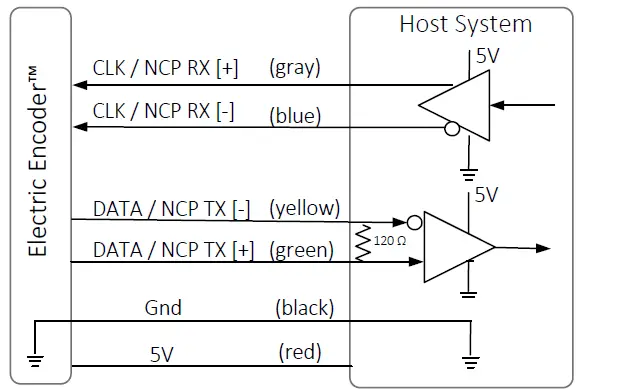
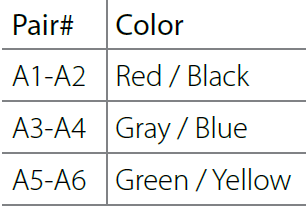
SSi / BiSS interface wires color code
| Orasan + | Gray | Relo |
| Orasan - | Asul | |
| Data - | Dilaw | Data |
| Data + | Berde | |
| GND | Itom | Yuta |
| +5V | Pula | suplay sa kuryente |
Mga parameter sa signal sa output sa SSi / BiSS
| Output code | Binary |
| Serial nga output | Nagkalainlain nga RS-422 |
| Relo | Nagkalainlain nga RS-422 |
| Frequency sa orasan | 0.1- 5.0 MHz |
| Rate sa pag-update sa posisyon | 35 kHz (Opsyonal – hangtod sa 375 kHz) |
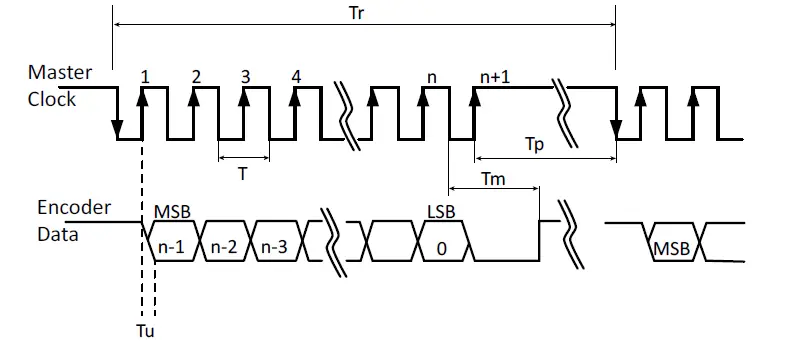
Digital SSi Interface
Ang Synchronous Serial Interface (SSi) usa ka point to point serial interface standard tali sa master (eg controller) ug usa ka slave (eg sensor) para sa digital data transmission.
Gitukod Sa Pagsulay nga kapilian (BIT)
Ang BIT nagpaila sa kritikal nga abnormalidad sa mga internal nga signal sa encoder.
'0' – ang internal nga mga signal naa sa sulod sa normal nga limitasyon, '1' – Error
Ang Part Number sa encoder nagpakita kung ang encoder naglakip sa BIT. Kung walay BIT nga gipakita sa PN, walay dugang nga error bit.
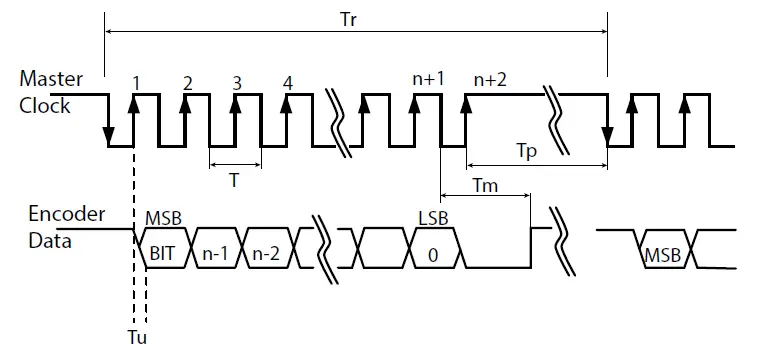
| Deskripsyon | Mga rekomendasyon | |
| n | Resolusyon sa posisyon | 12-20 |
| T | Panahon sa orasan | |
| f= 1/T | Frequency sa orasan | 0.1-5.0 MHz |
| Tu | Panahon sa pag-update sa gamay | 90 sec |
| Tp | Paghunong sa oras | 26 – ∞ μsec |
| Tm | Panahon sa Monoflop | 25 μsec |
| Tr | Panahon tali sa 2 ka kasikbit nga mga hangyo | Tr > n*T+26 μsec |
| fr=1/Tr | Kadaghanon sa paghangyo sa datos |
Digital BiSS-C Interface
Ang BiSS - C Interface usa ka unidirectional serial synchronous protocol alang sa digital data transmission diin ang Encoder naglihok isip "ulipon" nga nagpadala sa datos sumala sa "Master" nga orasan. Ang BiSS protocol gidisenyo sa B mode ug C mode (padayon nga mode). Ang BiSS-C interface ingon nga SSi gibase sa RS-422 nga mga sumbanan.
Gitukod Sa Pagsulay nga kapilian (BIT)
Ang BIT nagpaila sa kritikal nga abnormalidad sa mga internal nga signal sa encoder.
'1' – ang internal nga mga signal naa sa sulod sa normal nga limitasyon, '0' – Error
Ang Part Number sa encoder nagpakita kung ang encoder naglakip sa BIT. Kung walay BIT nga gipakita sa PN, ang error bit kanunay 1.
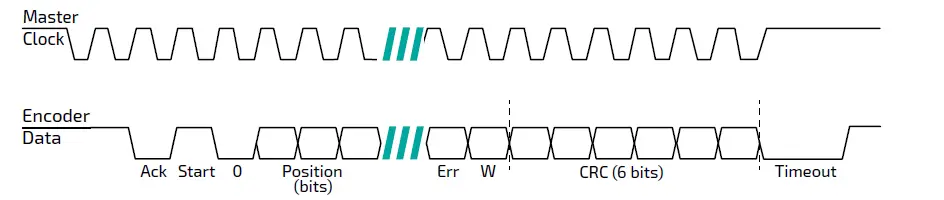
| Bit allocation kada encoder-resolution | Default nga Deskripsyon | Gitas-on | |||||
| 17 gamay | 18 gamay | 19 gamay | 20 gamay | ||||
| 27 | 28 | 29 | 30 | Ack | Panahon diin gikalkula sa encoder ang hingpit nga posisyon, usa ka siklo sa orasan | 0 | 1/oras |
| 26 | 27 | 28 | 29 | Pagsugod | Encoder signal alang sa "pagsugod" data ipadala | 1 | 1 gamay |
| 25 | 26 | 27 | 28 | “0” | "Pagsugod" bit follower | 0 | 1 gamay |
| 8…24 | 8…25 | 8…26 | 8…27 | AP | Absolute nga Posisyon encoder data | Kada resolusyon | |
| 7 | 7 | 7 | 7 | Sayop | BIT (Built In Test nga opsyon) | 1 | 1 gamay |
| 6 | 6 | 6 | 6 | Pahimangno. | Pasidaan (dili aktibo) | 1 | 1 gamay |
| 0…5 | 0…5 | 0…5 | 0…5 | CRC | Ang CRC polynomial alang sa posisyon, sayup ug pasidaan nga datos mao ang: x6 + x1 + x0. Kini gipasa sa MSB una ug balit-ad. Ang gamay nga pagsugod ug "0" nga gamay wala iapil sa kalkulasyon sa CRC. | 6 bitay | |
| Timeout | Paglabay sa taliwala sa sunod-sunod nga "pagsugod" hangyo cycle ni | 25 ug | |||||
Setup mode sa NCP (Netzer Communication Protocol)
Kini nga mode sa serbisyo naghatag ug access pinaagi sa USB sa usa ka PC nga nagpadagan sa aplikasyon sa Netzer Encoder Explorer (sa MS Windows 7/10). Ang komunikasyon pinaagi sa Netzer Communication Protocol (NCP) sa RS-422 gamit ang parehas nga set sa mga wire. Gamita ang mosunod nga pin assignment aron makonektar ang encoder ngadto sa 9-pin D-type connector sa RS-422/USB converter CNV-0003 o sa NanoMIC.
Electric encoder interface, D Type 9 pin nga Babaye
| Deskripsyon | Kolor | Kalihokan | Pin No |
| SSi Clock / NCP RX | Gray | Orasan / RX + | 2 |
| Asul | Orasan / RX – | 1 | |
| SSi Data / NCP TX | Dilaw | Data / TX – | 4 |
| Berde | Data / TX + | 3 | |
| Yuta | Itom | GND | 5 |
| suplay sa kuryente | Pula | +5V | 8 |
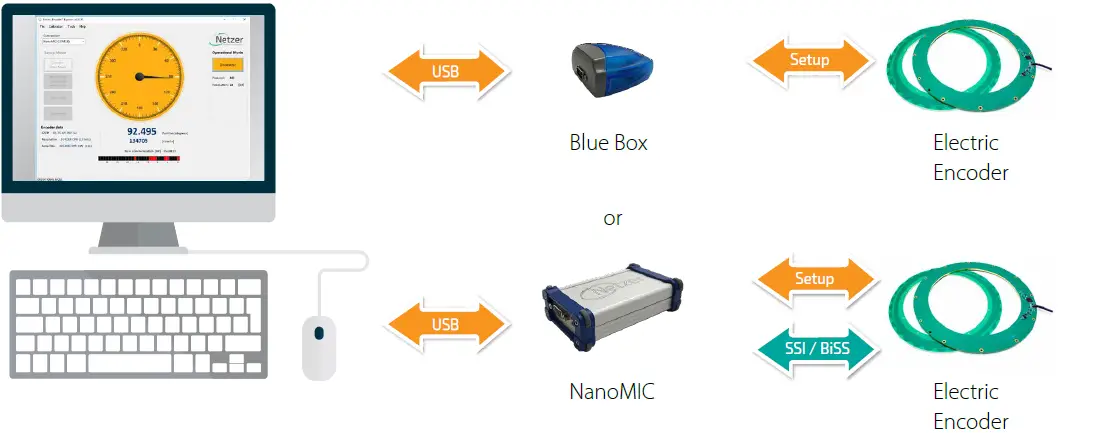
Ikonektar ang Netzer encoder sa converter, ikonektar ang converter sa kompyuter ug dagan ang Electric Encoder Explorer Software Tool
Koneksyon sa kuryente ug grounding
Tan-awa ang mosunod nga konsiderasyon sa grounding:
- Ang taming sa kable nga naglutaw sa kuryente (wala konektado) pinaagi sa default.
- Labi nga girekomenda nga itago ang mga wire sa motor nga PWM nga adunay elektrikal nga panagang ug / o ipalayo sa encoder.
Mubo nga sulat: Gikinahanglan ang 4.75 hangtod 5.25 VDC nga suplay sa kuryente
Pagpamatuod sa Signal
Pagsugod sa Encoder Explorer
Siguroha nga makompleto ang mosunod nga mga buluhaton nga malampuson:
- Mekanikal nga Pagsakay
- Koneksyon sa Elektrisidad sa encoder
- Encoder Explore Software Installation
Pagdalagan ang Encoder Explorer tool (EE)
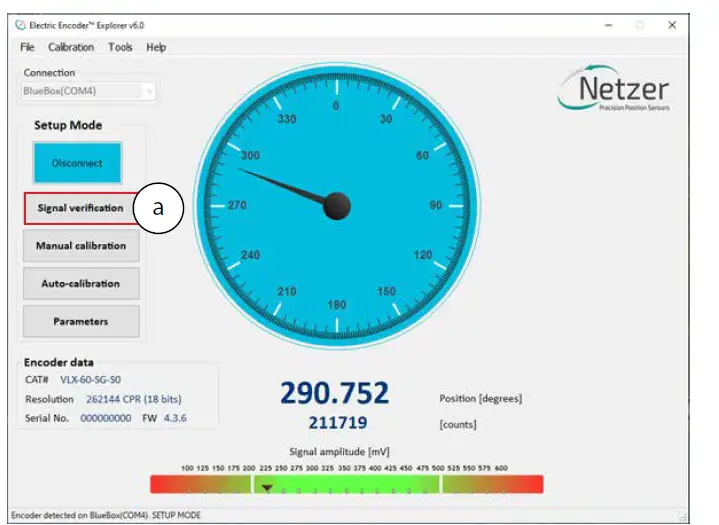
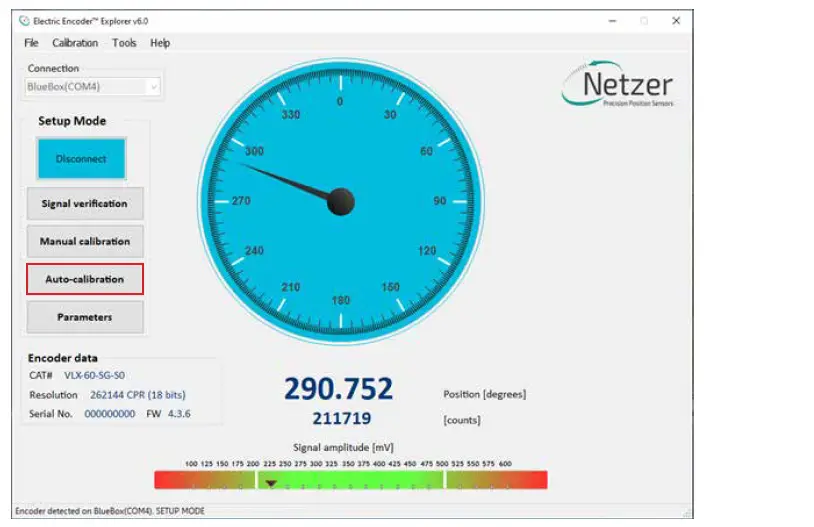
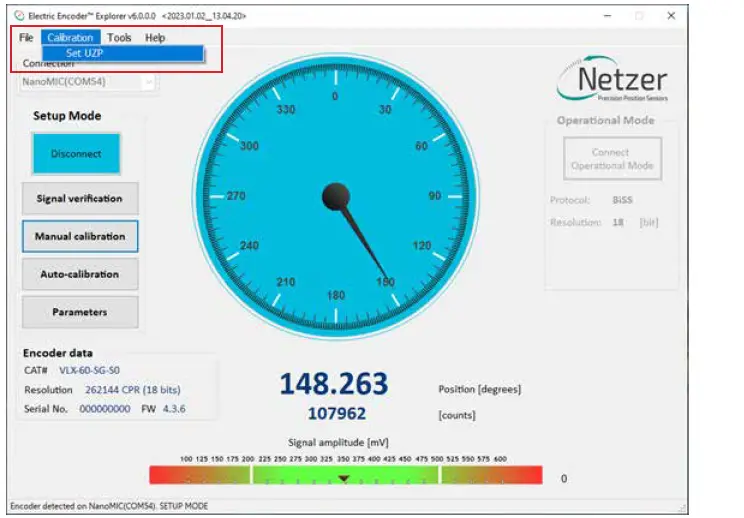
Pagsiguro sa husto nga komunikasyon sa encoder: (Setup mode pinaagi sa default). Ang posisyon-dial sa Encoder adunay kolor nga asul kung anaa sa Setup Mode, pinaagi sa NanoMic o sa BlueBox (a). Timan-i nga ang operational mode dili magamit pinaagi sa BlueBox (b). Ang Signal ampAng litude bar nagpakita kung ang signal naa sa madawat nga pagtugot (c) . Timan-i nga sa wala pa ipahigayon ang proseso sa Signal Verification ang bar mahimong magpakita sa usa ka out of tolerance signal (d). Ang datos sa encoder gipakita sa encoder data area (CAT No., Serial No.) (e). Ang display sa dial sa posisyon motubag sa rotation sa shaft (f).
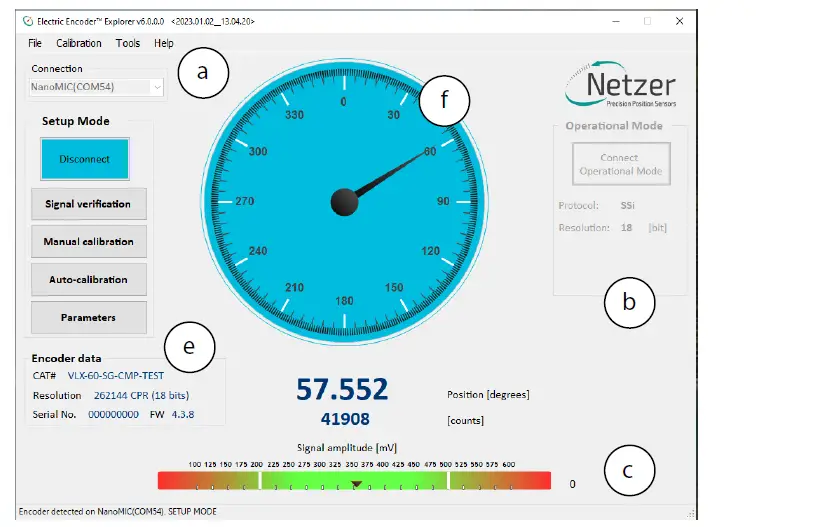

Importante nga himuon ang proseso sa Pag-verify sa Signal sa wala pa ang pag-calibrate sa encoder aron masiguro ang labing maayo nga pasundayag.
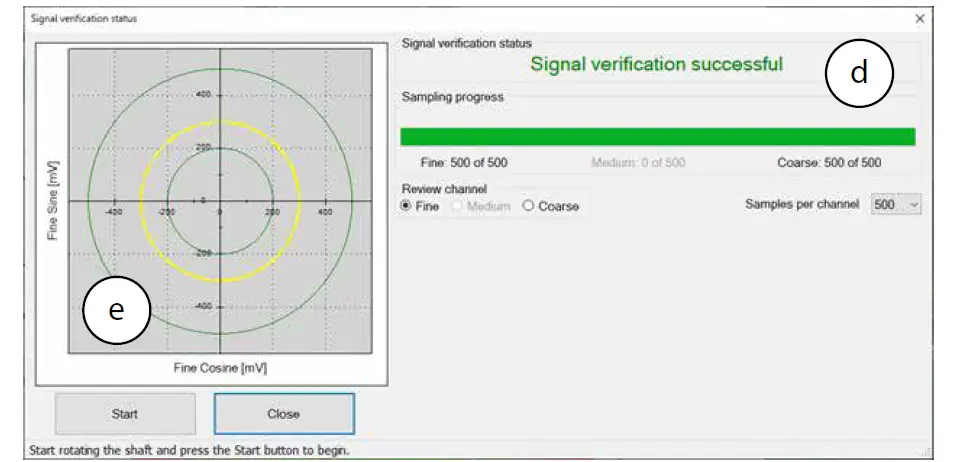
Proseso sa pag-verify sa signal
Ang proseso sa Signal Verification nagsiguro nga ang encoder na-mount sa husto ug naghatag ug maayong signal ampmga litud. Gihimo kini pinaagi sa pagkolekta sa hilaw nga datos sa pino ug coarse nga mga agianan sa panahon sa pagtuyok.
- Pagpili sa main screen (a).
- Pagpili sa pagsugod sa proseso (b).
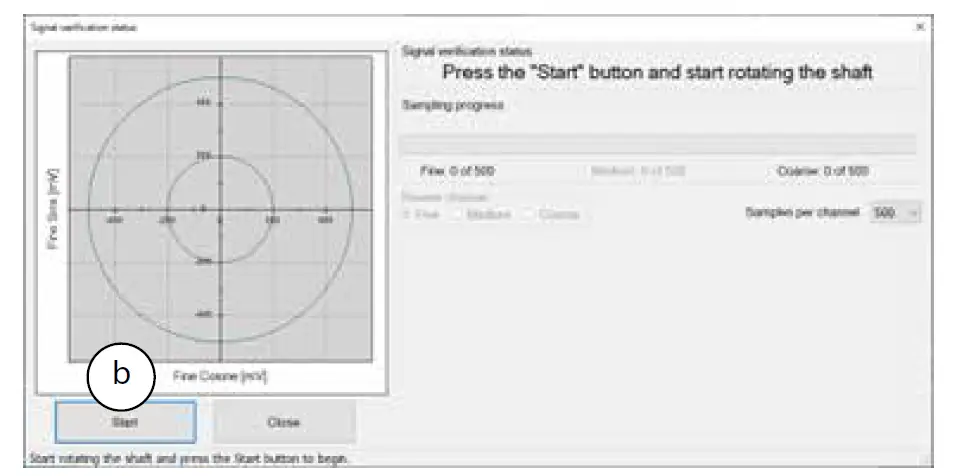
- I-rotate ang shaft aron makolekta ang maayo ug coarse channels data (c).

Kung magmalampuson ang proseso, ang status nga "Signal verification successful" makita (d). Ang 'amplitude circle' masentro sa tunga sa duha ka berdeng lingin, mas maayo sa tunga sa tolerance (e).
Apan timan-i, nga ang pag-mount sa encoder padulong sa grabe nga mekanikal nga pagtugot mahimong hinungdan sa amplitude lingin nga ma-offset gikan sa eksaktong tunga sa nominal nga posisyon. Kung ang signal wala sa pagtugot, ang pagpahibalo sa Error "Ampang litude mas ubos/mas taas kay sa min/max nga limitasyon sa XXX” nga makita (g). Dugang pa, ang status "Napakyas ang pag-verify sa signal - paghimo sa pagkakalibrate amplitude” makita sa ibabaw (h).
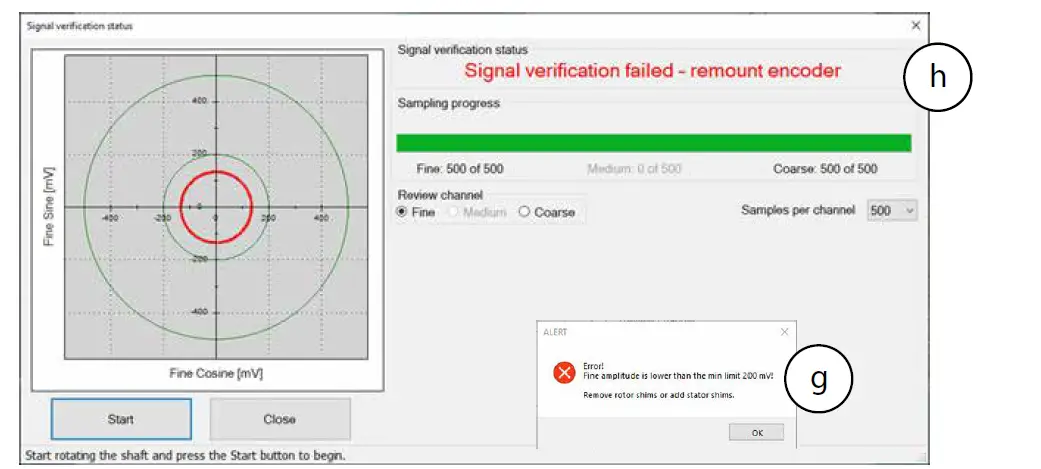
- Hunonga ang proseso ug i-mount pag-usab ang encoder, pagsiguro nga ang mga pagtugot sa mekanikal nga pag-install dili molapas, pagtangtang o pagdugang mga shims kung gikinahanglan.
- Balika ang proseso sa Signal Verification pagkahuman sa remount.
Kung ang proseso sa pag-verify sa signal malampuson nga nahuman, ipadayon ang yugto sa pagkakalibrate sa encoder, Seksyon 13
Pag-calibrate
Importante nga sa matag pag-instalar sa encoder, ang proseso sa Signal Verification makompleto sa dili pa mosulay sa pag-calibrate sa encoder. Alang sa mga encoder nga adunay FW 4 nga bersyon 4.1.3 o mas taas pa, posible nga makapili bisan usa ka hingpit nga awtomatiko nga proseso sa pag-calibrate, o usa ka manwal nga proseso sa pag-calibrate sa matag hugna.
Auto-calibration
Ang Auto Calibration gisuportahan sa mga encoder nga adunay FW 4 nga bersyon 4.1.3 o mas taas pa. Alang niini nga mga encoder usa ka dugang nga "Auto-calibration" nga buton gipakita.
Auto-calibration nga proseso
Ang proseso sa Auto-calibration naglangkob sa tulo ka stages:
- Pagsulay sa Jitter - pagtimbang-timbang sa kasaba sa kuryente alang sa Fine, Medium, ug Coarse nga mga channel sa encoder. Atol sa pagsulay sa jitter, ang shaft kinahanglan nga wala’y hunong.
Atensyon! Ang Pass/Fail criteria sa Jitter test kay subay sa estrikto kaayo nga factory criteria ug ang pagkapakyas niini maka-abort sa Auto Calibration process.
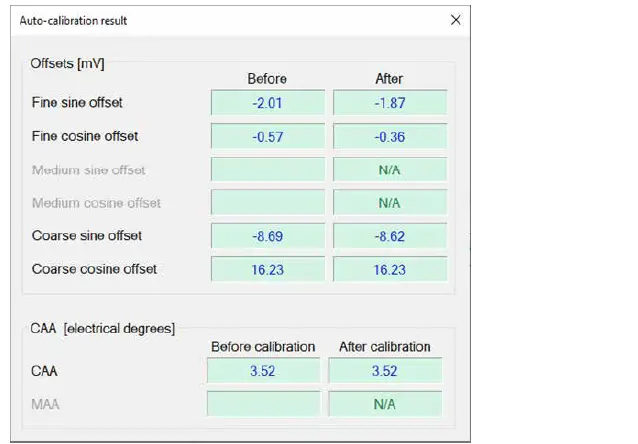
Apan, ang manual Jitter test isip kabahin sa Manual Calibration nga proseso sa seksyon 13.4, makapahimo sa user sa pagdesisyon kon ang jitter madawat ba sa iyang mga panginahanglan. - Offset calibration - naghimo sa offset calibration, ang shaft kinahanglan nga mag-rotate nga padayon.
- Absolute Position (AP) calibration - naghimo sa Coarse Amplitude Alignment (CAA) ug Medium AmpAng litude Alignment (MAA) gikalkulo.
Atol sa proseso sa Auto-Calibration ang Zero-Position sa encoder nagpabilin sa factory default zero position para sa bag-ong mga encoder. Posible nga itakda ang Zero Point pinaagi sa ibabaw nga menu bar, pinaagi sa pagpili sa tab nga "Calibration", ug pag-klik sa "Set UZP" ingon nga gipasabut sa seksyon 13.3.
Pagbuhat sa Auto-calibration
Pindota ang butones.
Ang nag-unang bintana sa auto-calibration moabli.
- Pilia ang angay nga sukod sa sukod nga magamit sa imong aplikasyon (a).
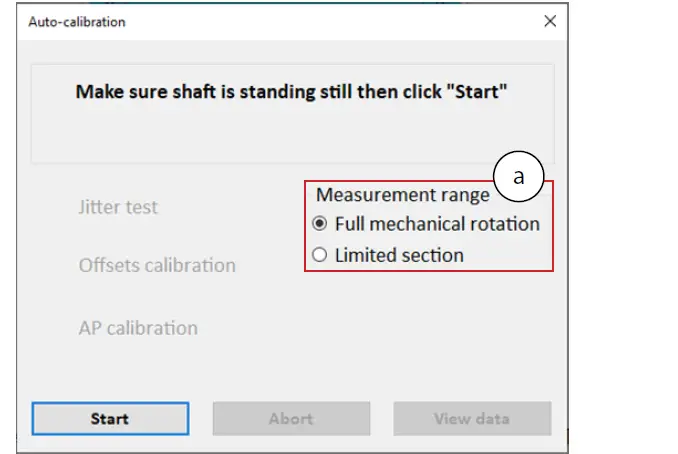
- Siguruha nga ipadayon ang shaft ug ipadayon ang
Ang Noise test ipahigayon ug sa malampuson nga pagkompleto ang label nga "Noise test" markahan og green check mark. Ang Offset calibration awtomatik nga magsugod sa pagkahuman sa Noise test. Kini nga pag-calibrate nanginahanglan nga ang shaft padayon nga i-rotate. Ang AP calibration awtomatik nga magsugod sa pagkompleto sa Accuracy Calibration. Ipadayon ang pagtuyok sa shaft niini nga hugna hangtod makompleto ang AP calibration, ug ang encoder ma-reset. Kung nahuman na ang pag-reset, ang proseso sa Auto-calibration malampuson nga nahuman.
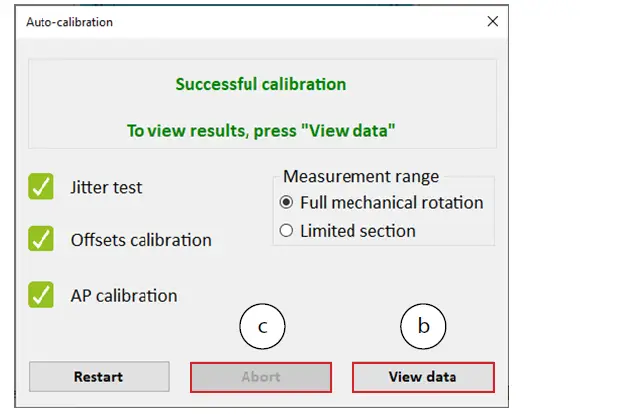
Ang user mahimong review ang mga resulta sa pag-calibrate pinaagi sa pag-klik saView data> buton (b).
Kanunay nga posible nga i-abort ang proseso sa Auto Calibration pinaagi sa pag-klik sa butones (c).
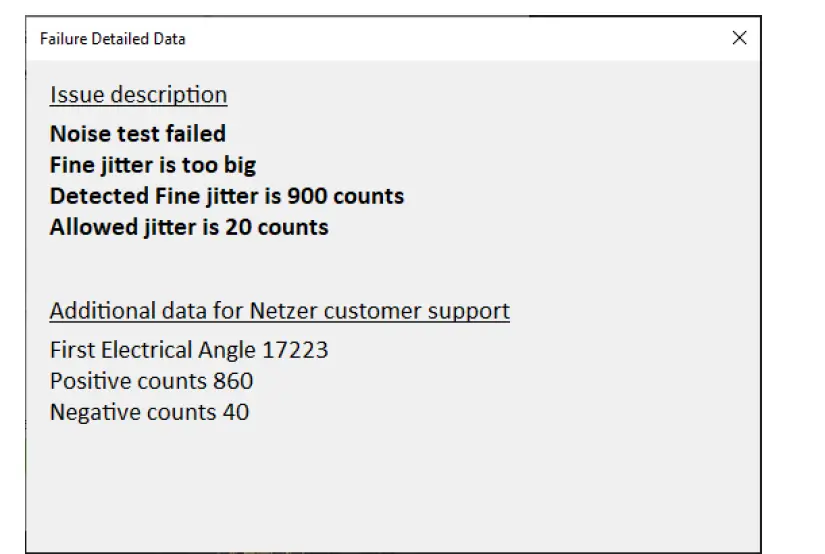
Mga kapakyasan sa auto-calibration
Kung ang usa ka pagsulay mapakyas (alang sa exampang Noise test) – ang resulta markahan ug pula nga X.
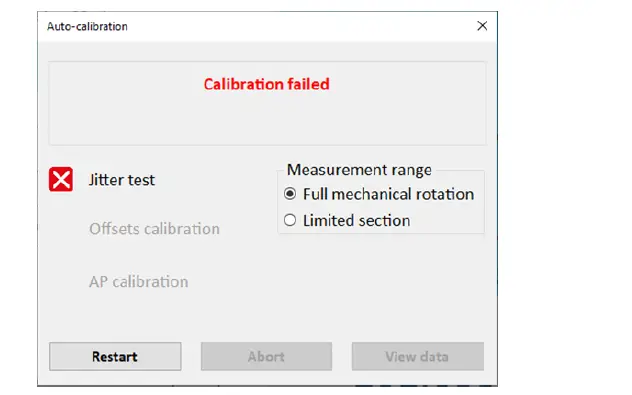
Kung napakyas ang proseso sa pag-calibrate, ang mga rekomendasyon sa pagtul-id ipakita, nga katumbas sa elemento nga napakyas sa pagsulay.
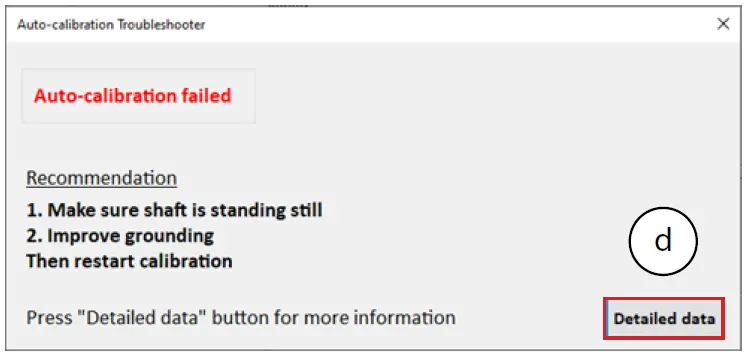
Posible nga i-review detalyado nga impormasyon bahin sa kapakyasan, pinaagi sa pag-klik sa buton (d).
Pagbutang sa zero-posisyon sa encoder
- Pagpili usa sa mga kapilian sa pagtakda sa zero point ug i-klik .
Posible nga itakda ang bisan unsang kasamtangan nga posisyon o i-rotate ang shaft sa bisan unsang lain nga posisyon nga ibutang ingon nga zero point.

Posible usab nga ibutang ang Zero Point pinaagi sa ibabaw nga menu bar, pinaagi sa pagpili sa tab nga "Calibration", ug pag-klik sa "Set UZP".
Pagsulay sa Jitter
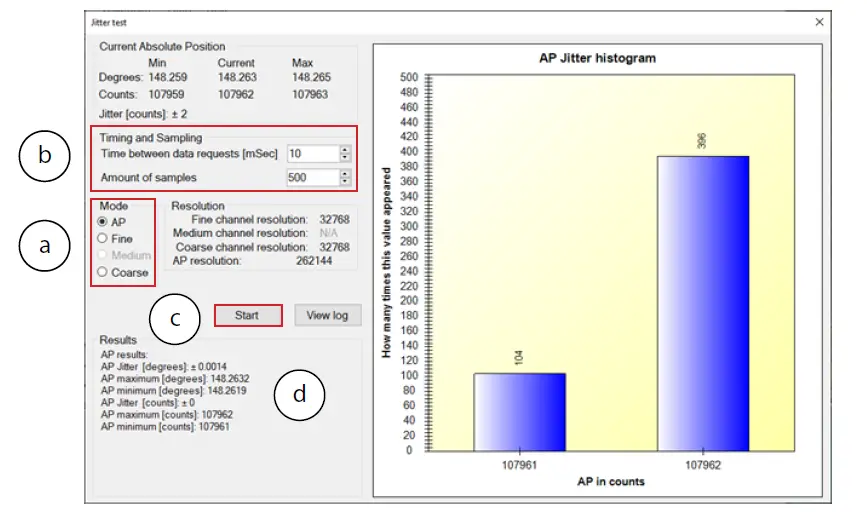
Ang jitter test gigamit sa pagtimbang-timbang sa lebel sa electric noise. Ang kasagarang jitter kinahanglan nga +/- 3 ka ihap; ang mas taas nga jitter mahimong magpakita sa kasaba sa sistema ug magkinahanglan og mas maayo nga grounding o panagang sa tinubdan sa kasaba sa kuryente.
- Pilia ang tab nga "Calibration", ug i-klik ang "Jitter Test"

- Pilia ang Jitter test mode (a).
- Itakda ang Timing ug Sampling mga parametro (b).
- Pag-klik buton (c) ug susiha kung ang mga resulta (d) naa sa madawat nga pagtugot alang sa gituyo nga aplikasyon.
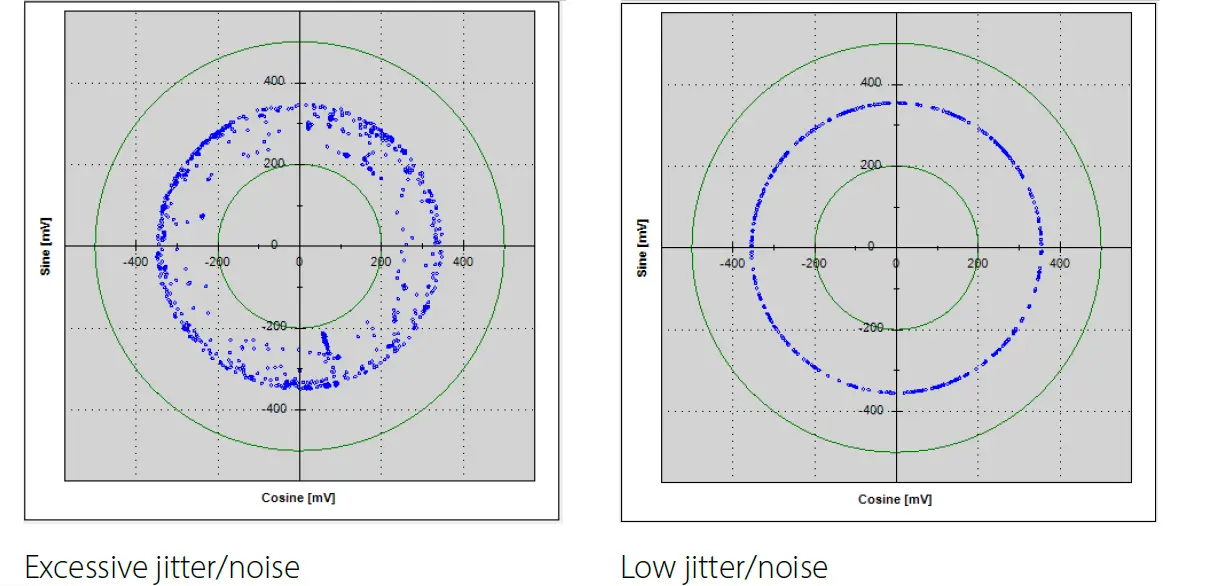
Laing timailhan sa sobra nga jitter/saba kung ang asul nga tuldok sa signal ampAng litude nga lingin dili parehas nga giapod-apod sa usa ka nipis nga lingin sama sa makita sa ubos.
Operasyon nga Mode
SSi / BiSS
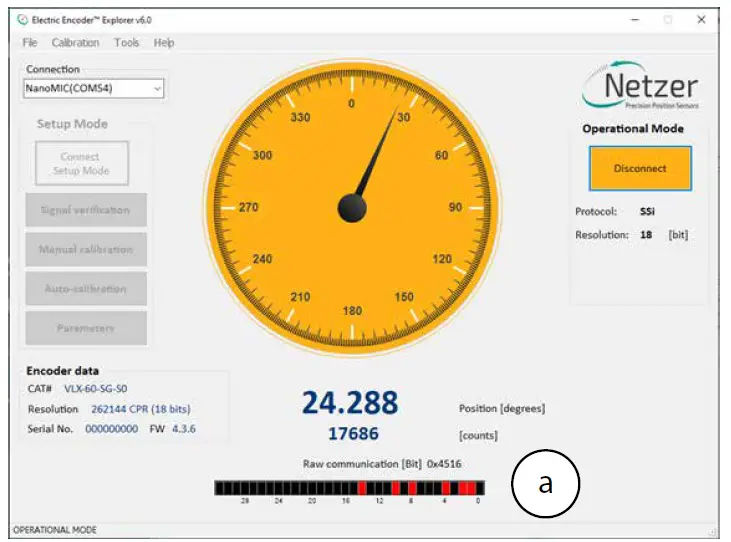
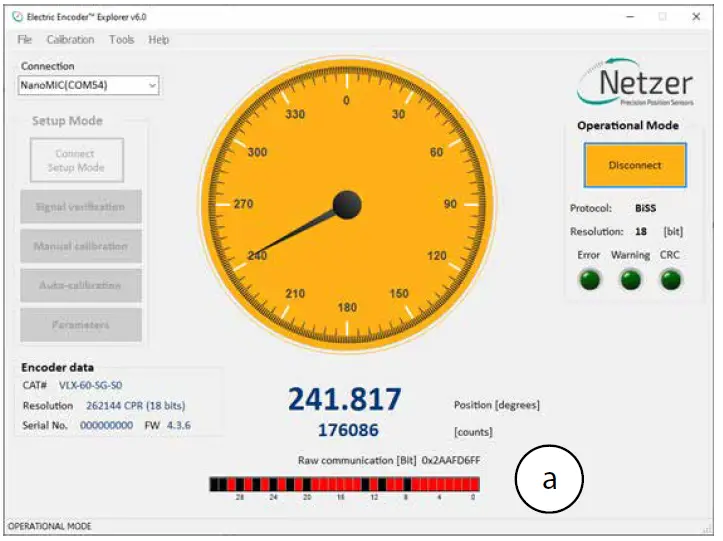
Ang indikasyon sa Operational Mode sa SSi / BiSS encoder interface magamit pinaagi sa paggamit sa NanoMIC aron makonektar sa encoder. Kung anaa sa Operational Mode ang kolor sa position dial kay orange.
Alang sa dugang nga kasayuran basaha ang bahin sa NanoMIC sa Netzer website
Ang operational mode naggamit sa interface sa SSi / BiSS nga adunay 1MHz clock rate. Ang position-dial sa encoder adunay kolor nga orange kung anaa sa Operational Mode. Ang bar sa ubos sa dial, mao ang katumbas nga binary nga pulong nga output alang sa kasamtangan nga posisyon sa shaft (a).
SSi Protocol
BiSS Protocol
Corporate Headquarter
ISRAEL
Netzer Precision Position Sensors ACS Ltd.
Misgav Industrial Park, PO Box 1359
DN Misgav, 2017400
- Tel: +972 4 999 0420
USA
Ang Netzer Precision Position Sensors Inc.
200 Main Street, Salem
NH 03079
- Tel: +1 617 901 0820
- www.netzerprecision.com
Copyright © 2024 Netzer Precision Position Sensors ACS Ltd. Tanang katungod gigahin.
Mga Dokumento / Mga Kapanguhaan
 |
Netzer Precision VLP-247 Hollow Shaft Rotary Encoder Kit Encoder [pdf] Giya sa Gumagamit VLP-247, VLP-247, VLP-247 Hollow Shaft Rotary Encoder Kit Encoder, VLP-247, Hollow Shaft Rotary Encoder Kit Encoder, Shaft Rotary Encoder Kit Encoder, Rotary Encoder Kit Encoder, Encoder Kit Encoder, Kit Encoder, Encoder |



