تصويري انجنيئرنگ STEVE-6D يوزر مينوئل

1 تعارف
STEVE-6D سافٽ ويئر ڊجيٽل ڪئميرا جي تصوير جي استحڪام جي ڪارڪردگي جو جائزو وٺندو آهي. هيٺ ڏنل تصوير هڪ اڳوڻي بيان ڪري ٿيampTE261 ٽيسٽ چارٽ استعمال ڪندي گھٽ-برعڪس slanted ڪنڊن جو تجزيو ڪرڻ لاءِ سيٽ اپ. ڪيمرا STEVE-6D تي لڳل آهي ۽ پوءِ وائبرٽ ٿئي ٿي جڏهن ڪئميرا جي تصويري اسٽيبلائيزيشن فنڪشن کي آن ۽ آف ڪيو وڃي ٿو ته جيئن مختلف نمائشي وقتن تي تصويرن کي پڪڙي سگهجي. هتان کان، سافٽ ويئر مبهم ٿلهي ڪنڊن جي ڪنڊ جي چوٽي جو تجزيو ڪري ٿو ۽ پوءِ ف-اسٽاپس ۾ استحڪام ڪارڪردگي جو حساب ڪري ٿو. هي سافٽ ويئر iQ-Trigger ۽ STEVE-6D هارڊويئر کي سائن ويج جنريٽر، ڪسٽم يوزر ويوفارمز، يا CIPA ڪسٽم هينڊ شيڪ سان پڻ ڪنٽرول ڪري سگھي ٿو.

STEVE-6D - ٽرنڪي حل
گرافڪ يوزر انٽرفيس
STEVE-6D سافٽ ويئر ٻن وڏن ماڊلز ۾ ورهايل آهي، هڪ STEVE-6D هارڊويئر سان ڪميونيڪيشن لاءِ ۽ ٻيو تصويري اسٽيبلائيزيشن ڪارڪردگي جي حساب سان [1].

STEVE-6D جي وائبريشن ڪنٽرول لاءِ ماڊل
وائبريشن ڪنٽرول ماڊل
"VIBRATION CONTROL" ماڊل موج فارم ڊيٽا کي سيٽ ڪري ٿو ۽ انٽرفيس کي منظم ڪري ٿو
STEVE-6D ۽ iQ-ٽريگر. “VIBRATION CONTROL” کي چئن مختلف حصن ۾ ورهايو ويو آهي، پهريون حصو [2] هيٺ ڏنل ٽيب ۾ سوئچ ڪري ٿو.
ڪنيڪشن ٽيب
STEVE-6D سان ڪنيڪشن حاصل ڪرڻ لاءِ، "Connect" بٽڻ تي ڪلڪ ڪريو [1]، ۽ STEVE-6D خودڪار طور تي سڀني ڇهن محورن کي صفر جي پوزيشن ڏانهن اشارو ڪندو. ڊسڪنيڪٽ ڪرڻ لاء، ڳاڙهي بٽڻ تي ڪلڪ ڪريو [2] ڏانهن
ساڄو. معلومات واري شيءِ [3] تي ماؤس جي ڪرسر کي هور ڪرڻ سان ڳنڍيل ڪنٽرولر بابت معلومات ظاهر ٿيندي، جيئن ٽول ٽائپ ۾ سيريل نمبر ۽ فرم ويئر ورزن.

ڪنيڪشن ٽيب
presets ٽيب
ڪئميرا سسٽم کي آساني سان ترتيب ڏئي سگھجي ٿو گھمڻ واري نقطي جي وضاحت ڪندي، پيوٽ پوائنٽ جي نالي سان سڃاتو وڃي ٿو [1]، ۽ مقامي گھر/صفر پوزيشن [2]. هر waveform ڊيٽا وکر هن پوزيشن ڏانهن اشارو ڪري ٿو.
ڊفالٽ پيوٽ پوائنٽ (x=y=z=0) رکيل پليٽ جي ھيٺئين مرڪز تي واقع آھي. توھان ان جي پوزيشن کي تبديل ڪري سگھو ٿا جيڪو توھان جي ايپليڪيشن لاءِ بھترين آھي. مثال طورampلي، هڪ موبائل فون سان، اهو سمجھ ۾ اچي ٿو ته پيوٽ پوائنٽ کي فون جي مرڪز ڏانهن سيٽ ڪيو وڃي ڇاڪاڻ ته اهو عام طور تي گردش جو مرڪز هوندو آهي جڏهن صارف ان کي رکندو آهي. بهرحال، هڪ SLR ڪئميرا شايد ان جي بلڪل مختلف جاميٽري جي ڪري گردش جو هڪ مختلف مرڪز آهي

presets ٽيب
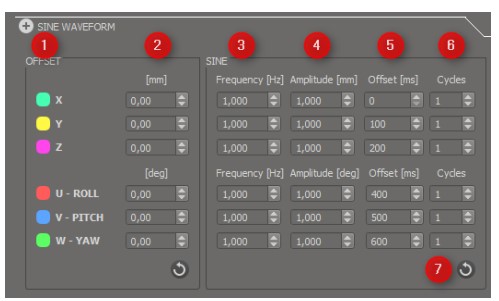
Sine waveform ٽيب
هر محور لاءِ هڪ سائي لہر جنريٽر موج فارم ڊيٽا کي ترتيب ڏيڻ لاءِ تڪڙو رستو ٺاهي ٿو. نئين waveform جي وضاحت ڪرڻ لاء، پوزيشن بابت آفسيٽ جي قيمتن کي تبديل ڪريو [2]، تعدد [3]، amplitude [4]، ۽
وقت بند ڪرڻ [5]. ”سائيڪلس“ [6] اسپن باڪس بيان ڪري ٿو ته سائي کي ڪيترا ڀيرا ورجائڻ گهرجي. waveform کي انجام ڏيڻ لاء، "MOVE" بٽڻ تي ڪلڪ ڪريو. ھيٺئين ساڄي ڪنڊ ۾ بٽڻ تي ڪلڪ ڪريو [7].
Sine waveform ٽيب
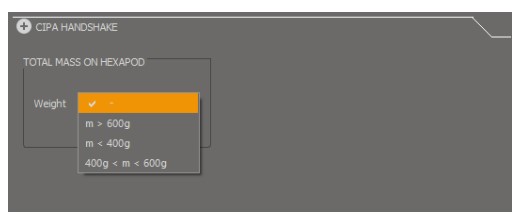
CIPA هٿ ملائڻ واري ٽيب
ڪنهن به ٽن CIPA هٿ ملائڻ لاءِ، پهريون، چونڊيو نظام جو وزن. اتان کان، موج ڊيٽا خودڪار طريقي سان STEVE-6D ڪنٽرولر تي اپ لوڊ ڪيو ويندو آهي، ۽ حرڪت شروع ٿيندي آهي
جڏهن MOVE بٽڻ دٻايو ويندو. CIPA غير ظاهر ڪرڻ واري معاهدي جي ڪري، "WAVEFORM پلاٽ" صرف هڪ اڳوڻي آهيample
CIPA هٿ ملائڻ واري ٽيب
ڪسٽم waveform ٽيب
معياري waveform جي ذريعي
هڪ سادي .txt ٺاهي STEVE-6D تي ڪسٽم موج فارم اپ لوڊ ڪريو file ڪارٽيزئن ڪوآرڊينيٽس سان. سڀني قدرن کي ٽيب اسٽاپ سان الڳ ڪيو وڃي. محور جي ترتيب XYZUV W. سيٽ ڪريو sampSTEVE-6D سافٽ ويئر ۾ waveform جي ling جي شرح ۽ پوء لوڊ ڪريو .txt file سافٽ ويئر ڏانهن. سڀ ڪوآرڊينيٽس آهن بي پرواهه پيوٽ پوائنٽ ۽ هومنگ پوزيشن. .txt کان پوءِ موج فارم اپلوڊ خود بخود شروع ٿئي ٿو file STEVE-6D سافٽ ويئر ۾ لوڊ ڪيو ويو آهي. File معياري waveform لاءِ تعريف: (استعمال ڪريو ٽيب طور جدا ڪندڙ)

مقامي ڊيٽا جي ذريعي
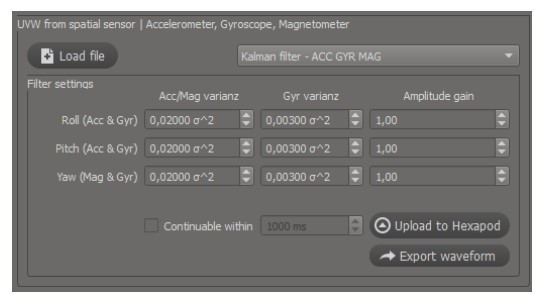
اسمارٽ فونز جهڙوڪ اسمارٽ فونز (accelerometer، gyroscope، magnetometer) جو تجزيو ڪرڻ وقت مقامي سينسر ڊيٽا استعمال ڪريو. وڌيڪ صحيح گھمڻ واريون قيمتون حاصل ڪرڻ لاءِ، Acc/Mag ۽ Gyr variant لاءِ پيٽرول سيٽ ڪريو.
جي ampلائيٽ حاصل صرف اسڪيلنگ لاءِ آهي ampادب. سڀني پيرا ميٽرن کي سيٽ ڪرڻ کان پوء، ڪلڪ ڪريو اپلوڊ to hexapod بٽڻ تي تحريڪ شروع ڪرڻ لاء. جاري رکڻ وارو چيڪ بڪس صارف کي اجازت ڏيندو ته موج فارم لاءِ مدت مقرر ڪري جاري رکڻ لاءِ جيستائين شروعاتي پوزيشن آخري پوزيشن کان مختلف هجي. هتي صرف ايڪليروميٽر يا گيروسکوپ ڊيٽا استعمال ڪرڻ جو اختيار پڻ آهي.
ايڪسپورٽ waveform بٽڻ استعمال ڪري سگھجي ٿو موج کي بچائڻ لاءِ ۽ IS ڪارڪردگي جي حساب ڪتاب لاءِ. ڊيٽا ايسampلنگهه جي شرح 1000Hz آهي
فضائي سينسر سيٽنگون
File مقامي سينسر مان UVW جي تعريف:
| HH:MM:SS.ZZZZ | AccX[جي] | AccY[جي] | AccZ[جي] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | ميگ[µt] | ميگ[µt] | ميگ[µt] |
ٽريگر ٽيب
ريموٽ ڪئميرا جاري ڪري سگھجي ٿو iQ-Trigger سان. "WAVEFORM پلاٽ" تي ڪلڪ ڪندي يا دستي طور تي iQ-Trigger ٽئب ۾ وقت چونڊڻ سان ڪيترن ئي رليز جي وقتن جي وضاحت ڪرڻ ممڪن آهي [3]. جيڪڏهن هڪ بي ترتيب ڇڏڻ وقت جي ضرورت آهي، بيان ڪريو رليز جي ڳڻپ في waveform [2]. هر iQ-ٽريگر رليز جي وضاحت ڪئي وئي آهي شوٽنگ جي وقفي، ڇڏڻ جي مدت، ۽ ڊيلٽا وقت جي وچ ۾ ٻه ڪئميرا رليز [1].

عمودي سٽون ظاهر ڪن ٿيون Digitus ڇڏڻ وقت
هارڊويئر، اسٽيٽس، ۽ تصوير/موج جي ڳڻپ ڏانهن موڪليو
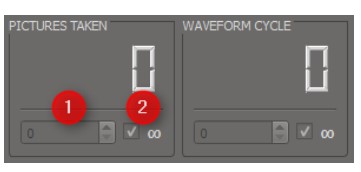
ڪنيڪشن جي صورتحال يا غلطين بابت سڀ معلومات "STATUS" واري علائقي ۾ ڏيکاريل آهي. تحريڪ شروع ڪرڻ لاء، "MOVE" بٽڻ کي دٻايو. "Home Position" بٽڻ کي دٻائڻ سان، STEVE-6D سڌو سنئون ھومنگ پوزيشن ڏانھن ھلندو آھي، جيڪو اڳ ۾ "PRESETS" ٽئب ۾ سيٽ ڪيو ويو ھو. جيڪڏهن ضروري آهي ته اسٽيو-6D کي ٻيهر ترتيب ڏيو، "ريفرنس پليٽ فارم" بٽڻ تي ڪلڪ ڪريو. جڏهن "تصوير ورتي وئي" يا "واوفارم سائيڪل" جي قيمت جي وضاحت ڪندي، اهو ممڪن آهي ته اسٽيو-6D جي حرڪت کي خودڪار طور تي روڪيو وڃي. قيمت کي لامحدود تي مقرر ڪريو [2] يا ڳڻپ جي تعداد لاءِ هڪ قدر چونڊيو [1] iQ-ٽريگر کي ٽرگر ڪرڻ گهرجي، يا موج کي هلائڻ گهرجي.
ڊيٽا جو تجزيو ڪريو
"ڊيٽا جو تجزيو" ماڊل تصويري استحڪام جي حساب سان ڪري ٿو. هن ماڊل جا ٽي اهم حصا آهن. پهريون حصو ”ميٽا ڊيٽا ٽول“ آهي [1]، جيڪو ڪيمرا ميٽاڊيٽا سيٽ ڪري ٿو. ٻيو
حصو IS-ڪارڪردگي جي حساب سان تصويري بيچ پروسيسنگ آهي [2]. آخري حصو قبضو ڪيل تصويرن جا نتيجا ڏيکاري ٿو.
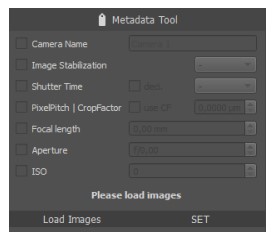
ميٽاداٽا
IS-پرفارمنس جي حسابن لاءِ ڪئميرا جي ميٽا ڊيٽا جي معلومات هجڻ ضروري آهي جهڙوڪ پکسل پچ ۽ شٽر ٽائيم. جيڪڏهن ڪئميرا هن معلومات کي تصوير ۾ رڪارڊ نٿو ڪري file, تصويرن جو هڪ بيچ لوڊ ڪريو ۽ دستي طور ان کي .jpg تصوير ۾ لکو. تصويرون لوڊ ڪريو، پيٽرولر سيٽ ڪريو، ۽ پوء "SET" بٽڻ کي دٻايو.
صرف JPEG تصويرن لاءِ
IS-Performance ڳڻپ لاءِ تصويرون لوڊ ڪريو
هڪ ڀيرو ريفرنس سيريز لوڊ ٿي وڃي، IS-ON لاءِ ٽيسٽ سيريز چونڊيو. ISOFF لاءِ گهٽ ۾ گهٽ هڪ تصويري سيريز گهربل آهي. جيڪڏهن CIPA هٿ ملائڻ واري موج استعمال ڪئي وئي، IS-OFF لاءِ ٽيسٽ سيريز جي ضرورت ناهي.
ان جي بدران، CIPA لاء بٽڻ تي ڪلڪ ڪريو ۽ پوء ڪئميرا وزن چونڊيو. ڪسٽم موشن ڊيٽا بٽڻ تي ڪلڪ ڪري ڪسٽم موشن جي ماپن مان تصويرون لوڊ ٿي سگھن ٿيون. "تصوير جو مرڪز
صرف" چيڪ بڪس تيز پر گهٽ درست ڊيٽا لاءِ دستياب آهي. جڏهن هي اختيار چونڊيو، صرف وچين ڪنڊ باڪس حساب جي دوران استعمال ڪيو ويندو آهي.

هڪ دفعو اختيارن کي چونڊيو ويو آهي، هڪ وڻ view مختلف سيريز جو ظاهر ٿيندو، جيئن هيٺ ڏٺو ويو آهي. جيڪڏهن ڪا به تصويري ميٽاداٽا موجود نه آهي، ته پوءِ استعمال ڪريو "ميٽا ڊيٽا ٽول،" جيڪو غلطي جي پيغام سان ظاهر ٿئي ٿو
تصويرون STEVE-6D سافٽ ويئر تي لوڊ ٿيڻ کان پوء. هڪ دفعو مڪمل ٿيڻ بعد، تصوير جي استحڪام جي ڪارڪردگي جو حساب ڪتاب "پروسيس" بٽڻ تي ڪلڪ ڪندي شروع ڪري سگهجي ٿو. هڪ نتيجو file سنگل ايج جي چوٽي جي حساب سان فولڊر ۾ تصويرن سان گڏ محفوظ ڪيو ويندو.
| ختم ٿيڻ جو وقت | پچ [پڪس] | واو [عڪس] | Sqrt(p^2+y^2) |
IS- ڪارڪردگي
ڪنڊ جي چوٽي μm بمقابله نمائش جي وقت ۾ IS-ڪارڪردگي جي حساب سان. ISON ۽ IS-OFF (يا موشن ڊيٽا) سيريز جي ڪنارن جي چوٽي کي پوسٽ ڪارڊ جي سائيز ۾ تبديل ڪيو ويو آهي. viewهن عمل کي مڪمل ڪرڻ لاء 65-80 سينٽي جي فاصلي تي. ف-اسٽاپ [2] ۾ تصويري اسٽيبلائيزيشن ڪارڪردگي IS-ON ۽ IS-OFF وکر جي چونڪ واري نقطي تي واقع آهي 63μm جي عزم جي حد سان [1]. IS-Performance جو عددي قدر f-Stops ۾ ڏيکاريل آھي.

نتيجن جي ڊيٽا جي چونڊ
IS-Performance ڳڻپ جا واحد نتيجا چونڊڻ لاءِ، ھڪڙي سلائڊر کي منتقل ڪريو [1] لاءِ “SERIES,”
"نمائش جو وقت،" "تصوير،" يا "ROI" (دلچسپي وارو علائقو). هي حرڪت ڏيکاريل تبديل ڪندو
ايج اسپريڊ فنڪشن جا نتيجا ("ESF") [3]، اسپيشل فريڪوئنسي جواب ("SFR") [4]، ۽
"ان پٽ تصوير" [5] ٽيب. تفصيلي ڄاڻ ڏيکاري يا لڪائي سگھجي ٿي "INFO" بٽڻ سان [6].

ايج اسپريڊ فنڪشن (ESF)
ESF حساب ڪري ٿو هر ڪنڊ جي چوٽي. اهڙيء طرح، هڪ اوورampھڪڙي تصوير جي ھيٺئين پاسي واري ڪنڊ ROI ھر تصوير مان ڳڻيو ويندو آھي. هر تصوير ۾ ويهن تريل ڪنڊن تي مشتمل آهي، جنهن ۾ ڏهه پِچ ۽
ڏهه طرف ۾.
فضائي تعدد جواب (SFR)
SFR استعمال نه ڪيو ويو آهي IS-ڪارڪردگي جي حساب سان. ان جي بدران، اهو هر ROI جي ماڊل جي منتقلي جي فنڪشن کي بيان ڪري ٿو.
ان پٽ تصوير ۽ ROI چونڊ
اهو ممڪن آهي ته هر نتيجن لاء دلچسپي جي علائقي کي تبديل يا ڏيکاري. "ROIs کي تبديل ڪريو" بٽڻ تي ڪلڪ ڪريو ۽ ROI جي جڳھ کي تبديل ڪريو. نئين ROI سيٽ ڪرڻ لاء، بٽڻ تي ڪلڪ ڪريو، ۽ ROI کي ختم ڪرڻ لاء "-" بٽڻ استعمال ڪريو. زومنگ اثر لاءِ، ”زوم +“ بٽڻ تي ڪلڪ ڪريو ۽ تصوير تي مستطيل ٺاھيو.
نقص سنڀالڻ
جيڪڏهن سافٽ ويئر سڀني تصويرن مان هڪ تي 20 ROI نه ڳولي، پوء ان پٽ تصويري لسٽ دوران هڪ غلطي ٿي وئي آهي view. جيڪڏھن ائين ٿئي ٿو، مھرباني ڪري تصوير چونڊيو ۽ دستي طور تصوير لاءِ غائب ROIs بيان ڪريو.
Cحق Iمعلومات
هن سافٽ ويئر کي انسٽال ڪرڻ سان، توهان هيٺ ڏنل سافٽ ويئر لائسنس جي معاهدي جي شرطن جي پابند ٿيڻ کي قبول ڪندا آهيو.
ڪاپي رائيٽ © تصويري انجنيئرنگ GmbH & Co. KG، 2021
هن معاهدي تحت پيش ڪيل سافٽ ويئر "جيئن آهي" جي بنياد تي مهيا ڪيو ويو آهي، بغير ڪنهن وارنٽي يا نمائندگي جي ظاهري يا تقاضا، بشمول، پر ان تائين محدود ناهي، ڪنهن خاص مقصد لاءِ واپار يا فٽنيس جي ڪنهن به تقاضا وارنٽي. اهو صرف صارف جي ذميواري آهي ته ڪنهن خاص مقصد يا استعمال لاءِ سافٽ ويئر جي موزونيت جو تعين ڪرڻ. تصويري انجنيئرنگ GmbH & Co.
KG، ۽ ٻيو ڪو به جيڪو هن سافٽ ويئر جي تخليق، پيداوار، ترسيل، يا حمايت ۾ شامل ڪيو ويو آهي، ڪنهن به صورت ۾ سڌي، اڻ سڌي، خاص، نتيجي ۾، يا حادثاتي نقصان جي ذميواري نه هوندي، ڪنهن به خرابي، غلطي، يا غلطي جي نتيجي ۾. ڊسڪٽ يا سافٽ ويئر ۾ يا ڪنهن ٻئي واقعن کان، بشمول، پر ان تائين محدود ناهي، خدمت جي ڪنهن به رڪاوٽ، منافعي يا نيڪي جي نقصان، قانوني ڪارروائي يا ڪنهن ٻئي نتيجي ۾ نقصان. صارف هن سافٽ ويئر کي استعمال ڪرڻ کان پيدا ٿيندڙ سموري ذميواري قبول ڪري ٿو، جنهن لاءِ Image Engineering GmbH & Co. KG جي ڪا به ذميواري نه هوندي، قطع نظر ته اهڙو استعمال جائز آهي يا اڳڪٿي ڪري سگهجي ٿو. Image Engineering GmbH & Co. KG وٽ هن سافٽ ويئر پاران محفوظ ڪيل يا استعمال ٿيل ڪنهن به ڊيٽا يا پروگرام جي ڪا به ذميواري نه هوندي، جنهن ۾ اهڙي ڊيٽا يا پروگرامن جي وصولي جا خرچ شامل آهن. Image Engineering GmbH & Co. KG ڪنهن به وقت بغير اطلاع جي مهيا ڪيل معلومات ۽ لاڳاپيل سافٽ ويئر ۾ سڌارا يا سڌارا ڪرڻ جو حق محفوظ رکي ٿو.
هن دستور بابت وڌيڪ پڙهو ۽ PDF ڊائون لوڊ ڪريو:
دستاويز / وسيلا
 |
تصويري انجنيئرنگ STEVE-6D [pdf] استعمال ڪندڙ دستياب اسٽيو-6 ڊي، اسٽيو |



