ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ STEVE-6D ਉਪਭੋਗਤਾ ਮੈਨੂਅਲ

1 ਜਾਣ-ਪਛਾਣ
STEVE-6D ਸੌਫਟਵੇਅਰ ਡਿਜੀਟਲ ਕੈਮਰਿਆਂ ਦੇ ਚਿੱਤਰ ਸਥਿਰਤਾ ਪ੍ਰਦਰਸ਼ਨ ਦਾ ਮੁਲਾਂਕਣ ਕਰਦਾ ਹੈ। ਹੇਠ ਦਿੱਤੀ ਤਸਵੀਰ ਇੱਕ ਸਾਬਕਾ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈampTE261 ਟੈਸਟ ਚਾਰਟ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਘੱਟ-ਕੰਟਰਾਸਟ slanted ਕਿਨਾਰਿਆਂ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਲਈ le ਸੈੱਟਅੱਪ। ਕੈਮਰੇ ਨੂੰ STEVE-6D 'ਤੇ ਮਾਊਂਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਅਤੇ ਫਿਰ ਵਾਈਬ੍ਰੇਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਜਦੋਂ ਕੈਮਰੇ ਦਾ ਚਿੱਤਰ ਸਥਿਰਤਾ ਫੰਕਸ਼ਨ ਵੱਖ-ਵੱਖ ਐਕਸਪੋਜ਼ਰ ਸਮਿਆਂ 'ਤੇ ਚਿੱਤਰਾਂ ਨੂੰ ਕੈਪਚਰ ਕਰਨ ਲਈ ਚਾਲੂ ਅਤੇ ਬੰਦ ਹੁੰਦਾ ਹੈ। ਇੱਥੋਂ, ਸੌਫਟਵੇਅਰ ਧੁੰਦਲੇ ਝੁਕੇ ਹੋਏ ਕਿਨਾਰਿਆਂ ਦੇ ਕਿਨਾਰੇ ਦੀ ਚੌੜਾਈ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਦਾ ਹੈ ਅਤੇ ਫਿਰ f-ਸਟਾਪਾਂ ਵਿੱਚ ਸਥਿਰਤਾ ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ। ਇਹ ਸੌਫਟਵੇਅਰ iQ-Trigger ਅਤੇ STEVE-6D ਹਾਰਡਵੇਅਰ ਨੂੰ ਸਾਈਨ ਵੇਵ ਜਨਰੇਟਰ, ਕਸਟਮ ਯੂਜ਼ਰ ਵੇਵਫਾਰਮ, ਜਾਂ CIPA ਕਸਟਮ ਹੈਂਡਸ਼ੇਕ ਨਾਲ ਵੀ ਕੰਟਰੋਲ ਕਰ ਸਕਦਾ ਹੈ।

ਸਟੀਵ-6ਡੀ - ਟਰਨਕੀ ਹੱਲ
ਗ੍ਰਾਫਿਕਲ ਯੂਜ਼ਰ ਇੰਟਰਫੇਸ
STEVE-6D ਸੌਫਟਵੇਅਰ ਨੂੰ ਦੋ ਮੁੱਖ ਮੋਡੀਊਲਾਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ, ਇੱਕ STEVE-6D ਹਾਰਡਵੇਅਰ ਨਾਲ ਸੰਚਾਰ ਲਈ ਅਤੇ ਦੂਜਾ ਚਿੱਤਰ ਸਥਿਰਤਾ ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਗਣਨਾ ਲਈ [1]।

STEVE-6D ਦੇ ਵਾਈਬ੍ਰੇਸ਼ਨ ਕੰਟਰੋਲ ਲਈ ਮੋਡੀਊਲ
ਵਾਈਬ੍ਰੇਸ਼ਨ ਕੰਟਰੋਲ ਮੋਡੀਊਲ
"ਵਾਈਬ੍ਰੇਸ਼ਨ ਕੰਟਰੋਲ" ਮੋਡੀਊਲ ਵੇਵਫਾਰਮ ਡੇਟਾ ਸੈਟ ਅਪ ਕਰਦਾ ਹੈ ਅਤੇ ਵਿਚਕਾਰ ਇੰਟਰਫੇਸ ਦਾ ਪ੍ਰਬੰਧਨ ਕਰਦਾ ਹੈ
ਸਟੀਵ-6ਡੀ ਅਤੇ ਆਈਕਿਊ-ਟਰਿੱਗਰ। "ਵਾਈਬ੍ਰੇਸ਼ਨ ਕੰਟਰੋਲ" ਨੂੰ ਚਾਰ ਵੱਖ-ਵੱਖ ਹਿੱਸਿਆਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ, ਪਹਿਲਾ ਭਾਗ [2] ਹੇਠਾਂ ਦਿੱਤੀਆਂ ਟੈਬਾਂ ਵਿੱਚ ਬਦਲਦਾ ਹੈ।
ਕਨੈਕਸ਼ਨ ਟੈਬ
STEVE-6D ਨਾਲ ਕਨੈਕਸ਼ਨ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ, "ਕਨੈਕਟ ਕਰੋ" ਬਟਨ [1] 'ਤੇ ਕਲਿੱਕ ਕਰੋ, ਅਤੇ STEVE-6D ਆਪਣੇ ਆਪ ਹੀ ਸਾਰੇ ਛੇ ਧੁਰਿਆਂ ਨੂੰ ਜ਼ੀਰੋ ਦੀ ਸਥਿਤੀ ਦਾ ਹਵਾਲਾ ਦੇਵੇਗਾ। ਡਿਸਕਨੈਕਟ ਕਰਨ ਲਈ, ਲਾਲ ਬਟਨ [2] ਨੂੰ ਦਬਾਓ
ਸਹੀ ਜਾਣਕਾਰੀ ਆਈਟਮ [3] ਉੱਤੇ ਮਾਊਸ ਕਰਸਰ ਨੂੰ ਹੋਵਰ ਕਰਨ ਨਾਲ ਕਨੈਕਟ ਕੀਤੇ ਕੰਟਰੋਲਰ ਬਾਰੇ ਜਾਣਕਾਰੀ ਪ੍ਰਗਟ ਹੋਵੇਗੀ, ਜਿਵੇਂ ਕਿ ਟੂਲਟਿਪ ਵਿੱਚ ਸੀਰੀਅਲ ਨੰਬਰ ਅਤੇ ਫਰਮਵੇਅਰ ਸੰਸਕਰਣ।

ਕਨੈਕਸ਼ਨ ਟੈਬ
ਪ੍ਰੀਸੈੱਟ ਟੈਬ
ਕੈਮਰਾ ਸਿਸਟਮ ਨੂੰ ਰੋਟੇਸ਼ਨ ਪੁਆਇੰਟ, ਜਿਸ ਨੂੰ ਧਰੁਵੀ ਬਿੰਦੂ [1] ਵਜੋਂ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਸਥਾਨਕ ਘਰ/ਜ਼ੀਰੋ ਸਥਿਤੀ [2] ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਕੇ ਆਸਾਨੀ ਨਾਲ ਇਕਸਾਰ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਹਰ ਵੇਵਫਾਰਮ ਡੇਟਾ ਕਰਵ ਇਸ ਸਥਿਤੀ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
ਡਿਫੌਲਟ ਧਰੁਵੀ ਬਿੰਦੂ (x=y=z=0) ਬਰਕਰਾਰ ਰੱਖਣ ਵਾਲੀ ਪਲੇਟ ਦੇ ਹੇਠਲੇ ਕੇਂਦਰ ਵਿੱਚ ਸਥਿਤ ਹੈ। ਤੁਸੀਂ ਇਸਦੀ ਸਥਿਤੀ ਨੂੰ ਬਦਲ ਸਕਦੇ ਹੋ ਜੋ ਤੁਹਾਡੀ ਅਰਜ਼ੀ ਲਈ ਸਭ ਤੋਂ ਵਧੀਆ ਹੈ। ਸਾਬਕਾ ਲਈample, ਇੱਕ ਮੋਬਾਈਲ ਫ਼ੋਨ ਦੇ ਨਾਲ, ਫ਼ੋਨ ਦੇ ਕੇਂਦਰ ਵਿੱਚ ਧਰੁਵੀ ਬਿੰਦੂ ਨੂੰ ਸੈੱਟ ਕਰਨਾ ਸਮਝਦਾਰੀ ਰੱਖਦਾ ਹੈ ਕਿਉਂਕਿ ਇਹ ਆਮ ਤੌਰ 'ਤੇ ਰੋਟੇਸ਼ਨ ਦਾ ਕੇਂਦਰ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਇੱਕ ਉਪਭੋਗਤਾ ਇਸਨੂੰ ਰੱਖਦਾ ਹੈ। ਹਾਲਾਂਕਿ, ਇੱਕ SLR ਕੈਮਰੇ ਵਿੱਚ ਸ਼ਾਇਦ ਇਸਦੀ ਬਹੁਤ ਵੱਖਰੀ ਜਿਓਮੈਟਰੀ ਦੇ ਕਾਰਨ ਰੋਟੇਸ਼ਨ ਦਾ ਇੱਕ ਵੱਖਰਾ ਕੇਂਦਰ ਹੁੰਦਾ ਹੈ

ਪ੍ਰੀਸੈੱਟ ਟੈਬ
ਸਾਈਨ ਵੇਵਫਾਰਮ ਟੈਬ
ਹਰੇਕ ਧੁਰੇ ਲਈ ਇੱਕ ਸਾਈਨ ਵੇਵ ਜਨਰੇਟਰ ਵੇਵਫਾਰਮ ਡੇਟਾ ਸੈਟ ਅਪ ਕਰਨ ਦਾ ਇੱਕ ਤੇਜ਼ ਤਰੀਕਾ ਬਣਾਉਂਦਾ ਹੈ। ਇੱਕ ਨਵੇਂ ਵੇਵਫਾਰਮ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਨ ਲਈ, ਸਥਿਤੀ [2], ਬਾਰੰਬਾਰਤਾ [3] ਨਾਲ ਸੰਬੰਧਿਤ ਆਫਸੈੱਟ ਦੇ ਮੁੱਲਾਂ ਨੂੰ ਬਦਲੋ, amplitude [4], ਅਤੇ
ਸਮਾਂ ਆਫਸੈੱਟ [5]. “ਚੱਕਰ” [6] ਸਪਿਨ ਬਾਕਸ ਪਰਿਭਾਸ਼ਿਤ ਕਰਦਾ ਹੈ ਕਿ ਸਾਈਨ ਨੂੰ ਕਿੰਨੀ ਵਾਰ ਦੁਹਰਾਉਣਾ ਚਾਹੀਦਾ ਹੈ। ਵੇਵਫਾਰਮ ਕਰਨ ਲਈ, "ਮੂਵ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। ਹੇਠਲੇ ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਬਟਨ ਦਬਾਓ [7]।
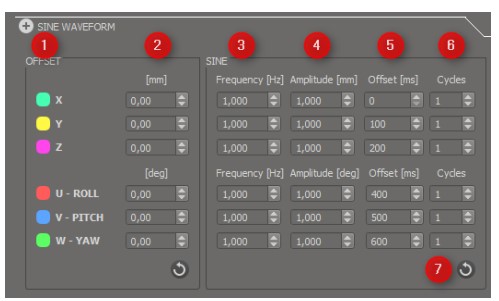
ਸਾਈਨ ਵੇਵਫਾਰਮ ਟੈਬ
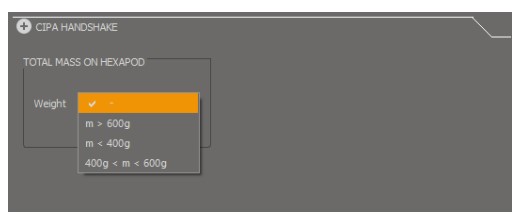
CIPA ਹੈਂਡਸ਼ੇਕ ਟੈਬ
ਤਿੰਨਾਂ ਵਿੱਚੋਂ ਕੋਈ ਵੀ CIPA ਹੈਂਡਸ਼ੇਕ ਕਰਨ ਲਈ, ਪਹਿਲਾਂ, ਆਪਟੀਕਲ ਸਿਸਟਮ ਦਾ ਭਾਰ ਚੁਣੋ। ਉੱਥੋਂ, ਵੇਵਫਾਰਮ ਡੇਟਾ ਆਪਣੇ ਆਪ STEVE-6D ਕੰਟਰੋਲਰ 'ਤੇ ਅਪਲੋਡ ਹੋ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਅੰਦੋਲਨ ਸ਼ੁਰੂ ਹੁੰਦਾ ਹੈ
ਜਦੋਂ ਮੂਵ ਬਟਨ ਦਬਾਇਆ ਜਾਂਦਾ ਹੈ। CIPA ਗੈਰ-ਖੁਲਾਸੇ ਸਮਝੌਤੇ ਦੇ ਕਾਰਨ, "ਵੇਵਫੋਰਮ ਪਲਾਟ" ਸਿਰਫ਼ ਇੱਕ ਸਾਬਕਾ ਹੈample
CIPA ਹੈਂਡਸ਼ੇਕ ਟੈਬ
ਕਸਟਮ ਵੇਵਫਾਰਮ ਟੈਬ
ਸਟੈਂਡਰਡ ਵੇਵਫਾਰਮ ਦੁਆਰਾ
ਇੱਕ ਸਧਾਰਨ .txt ਬਣਾ ਕੇ STEVE-6D 'ਤੇ ਇੱਕ ਕਸਟਮ ਵੇਵਫਾਰਮ ਅੱਪਲੋਡ ਕਰੋ file ਕਾਰਟੇਸ਼ੀਅਨ ਕੋਆਰਡੀਨੇਟਸ ਦੇ ਨਾਲ। ਸਾਰੇ ਮੁੱਲਾਂ ਨੂੰ ਇੱਕ ਟੈਬ ਸਟਾਪ ਨਾਲ ਵੱਖ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਧੁਰਾ ਕ੍ਰਮ XYZUV W ਹੈ। s ਸੈੱਟ ਕਰੋampSTEVE-6D ਸੌਫਟਵੇਅਰ ਵਿੱਚ ਵੇਵਫਾਰਮ ਦੀ ਲਿੰਗ ਰੇਟ ਅਤੇ ਫਿਰ .txt ਲੋਡ ਕਰੋ file ਸਾਫਟਵੇਅਰ ਨੂੰ. ਸਾਰੇ ਕੋਆਰਡੀਨੇਟ ਧਰੁਵੀ ਬਿੰਦੂ ਅਤੇ ਹੋਮਿੰਗ ਸਥਿਤੀ ਦੀ ਪਰਵਾਹ ਕੀਤੇ ਬਿਨਾਂ ਹਨ। ਵੇਵਫਾਰਮ ਅੱਪਲੋਡ .txt ਤੋਂ ਬਾਅਦ ਆਪਣੇ ਆਪ ਸ਼ੁਰੂ ਹੋ ਜਾਂਦਾ ਹੈ file STEVE-6D ਸਾਫਟਵੇਅਰ ਵਿੱਚ ਲੋਡ ਕੀਤਾ ਗਿਆ ਹੈ। File ਸਟੈਂਡਰਡ ਵੇਵਫਾਰਮ ਲਈ ਪਰਿਭਾਸ਼ਾ: (ਟੈਬ ਨੂੰ ਵਿਭਾਜਕ ਵਜੋਂ ਵਰਤੋ)

ਸਥਾਨਿਕ ਡੇਟਾ ਦੁਆਰਾ
ਸਮਾਰਟਫ਼ੋਨ (ਐਕਸੀਲੇਰੋਮੀਟਰ, ਜਾਇਰੋਸਕੋਪ, ਮੈਗਨੇਟੋਮੀਟਰ) ਵਰਗੀਆਂ ਡਿਵਾਈਸਾਂ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਦੇ ਸਮੇਂ ਸਥਾਨਿਕ ਸੈਂਸਰ ਡੇਟਾ ਦੀ ਵਰਤੋਂ ਕਰੋ। ਵਧੇਰੇ ਸਟੀਕ ਰੋਟੇਸ਼ਨ ਮੁੱਲ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ, Acc/Mag ਅਤੇ Gyr ਵੇਰੀਐਂਟ ਲਈ ਪੈਰਾਮੀਟਰ ਸੈੱਟ ਕਰੋ।
ਦ ampਲਿਟਿਊਡ ਲਾਭ ਸਿਰਫ ਸਕੇਲਿੰਗ ਲਈ ਹੈ ampਲਿਟਿਊਡ ਸਾਰੇ ਮਾਪਦੰਡ ਸੈੱਟ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਅੰਦੋਲਨ ਸ਼ੁਰੂ ਕਰਨ ਲਈ ਹੈਕਸਾਪੋਡ 'ਤੇ ਅੱਪਲੋਡ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। ਨਿਰੰਤਰ ਚੈਕਬਾਕਸ ਉਪਭੋਗਤਾ ਨੂੰ ਵੇਵਫਾਰਮ ਨੂੰ ਜਾਰੀ ਰੱਖਣ ਲਈ ਇੱਕ ਅੰਤਰਾਲ ਸੈਟ ਕਰਨ ਦੀ ਆਗਿਆ ਦੇਵੇਗਾ ਜਦੋਂ ਤੱਕ ਸ਼ੁਰੂਆਤੀ ਸਥਿਤੀ ਅੰਤ ਦੀ ਸਥਿਤੀ ਤੋਂ ਵੱਖਰੀ ਹੁੰਦੀ ਹੈ। ਸਿਰਫ ਐਕਸੀਲੇਰੋਮੀਟਰ ਜਾਂ ਜਾਇਰੋਸਕੋਪ ਡੇਟਾ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦਾ ਵਿਕਲਪ ਵੀ ਹੈ।
ਨਿਰਯਾਤ ਵੇਵਫਾਰਮ ਬਟਨ ਦੀ ਵਰਤੋਂ ਵੇਵਫਾਰਮ ਨੂੰ ਬਚਾਉਣ ਅਤੇ IS ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਗਣਨਾ ਲਈ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ। ਡਾਟਾ ਐੱਸampਲਿੰਗ ਦੀ ਦਰ 1000Hz ਹੈ
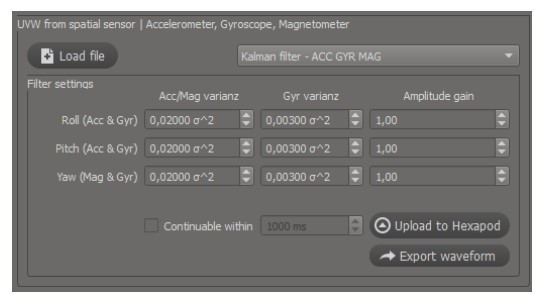
ਸਥਾਨਿਕ ਸੈਂਸਰ ਸੈਟਿੰਗਾਂ
File ਸਥਾਨਿਕ ਸੈਂਸਰ ਤੋਂ UVW ਲਈ ਪਰਿਭਾਸ਼ਾ:
| HH:MM:SS.ZZZZ | AccX[ਜੀ] | AccY[g] | AccZ[ਜੀ] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | ਮੈਗ[µt] | ਮੈਗ[µt] | ਮੈਗ[µt] |
ਟਰਿੱਗਰ ਟੈਬ
ਰਿਮੋਟ ਕੈਮਰਾ ਰੀਲੀਜ਼ iQ-Trigger ਨਾਲ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। "ਵੇਵਫੋਰਮ ਪਲਾਟ" 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਜਾਂ iQ-ਟ੍ਰਿਗਰ ਟੈਬ [3] ਵਿੱਚ ਹੱਥੀਂ ਸਮਾਂ ਚੁਣ ਕੇ ਕਈ ਰੀਲੀਜ਼ ਸਮੇਂ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਨਾ ਸੰਭਵ ਹੈ। ਜੇਕਰ ਇੱਕ ਬੇਤਰਤੀਬ ਰੀਲੀਜ਼ ਸਮੇਂ ਦੀ ਲੋੜ ਹੈ, ਤਾਂ ਪ੍ਰਤੀ ਵੇਵਫਾਰਮ [2] ਰੀਲੀਜ਼ਾਂ ਦੀ ਗਿਣਤੀ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰੋ। ਹਰ iQ-ਟ੍ਰਿਗਰ ਰੀਲੀਜ਼ ਨੂੰ ਸ਼ੂਟਿੰਗ ਲੈਗ, ਰੀਲੀਜ਼ ਦੀ ਮਿਆਦ, ਅਤੇ ਦੋ ਕੈਮਰੇ ਰੀਲੀਜ਼ਾਂ ਦੇ ਵਿਚਕਾਰ ਡੈਲਟਾ ਸਮਾਂ ਦੁਆਰਾ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ [1]।

ਲੰਬਕਾਰੀ ਰੇਖਾਵਾਂ ਡਿਜੀਟਸ ਰੀਲੀਜ਼ ਸਮੇਂ ਨੂੰ ਦਰਸਾਉਂਦੀਆਂ ਹਨ
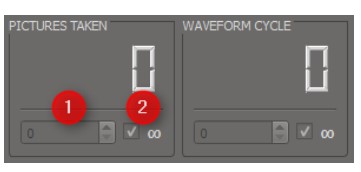
ਹਾਰਡਵੇਅਰ, ਸਥਿਤੀ, ਅਤੇ ਚਿੱਤਰ/ਵੇਵਫਾਰਮ ਗਿਣਤੀ ਨੂੰ ਭੇਜੋ
ਕੁਨੈਕਸ਼ਨ ਸਥਿਤੀ ਜਾਂ ਗਲਤੀਆਂ ਬਾਰੇ ਸਾਰੀ ਜਾਣਕਾਰੀ "ਸਟੇਟਸ" ਖੇਤਰ ਵਿੱਚ ਪ੍ਰਦਰਸ਼ਿਤ ਹੁੰਦੀ ਹੈ। ਇੱਕ ਅੰਦੋਲਨ ਸ਼ੁਰੂ ਕਰਨ ਲਈ, "ਮੂਵ" ਬਟਨ ਨੂੰ ਦਬਾਓ। "ਹੋਮ ਪੋਜੀਸ਼ਨ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਨ ਨਾਲ, ਸਟੀਵ-6D ਸਿੱਧਾ ਹੋਮਿੰਗ ਪੋਜੀਸ਼ਨ 'ਤੇ ਜਾਂਦਾ ਹੈ, ਜੋ ਪਹਿਲਾਂ "ਪ੍ਰੀਸੈਟਸ" ਟੈਬ ਵਿੱਚ ਸੈੱਟ ਕੀਤਾ ਗਿਆ ਸੀ। ਜੇਕਰ STEVE-6D ਨੂੰ ਮੁੜ-ਕੈਲੀਬਰੇਟ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੈ, ਤਾਂ "ਰੈਫਰੈਂਸ ਪਲੇਟਫਾਰਮ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। ਜਦੋਂ "ਤਸਵੀਰ ਲਈ ਗਈ" ਜਾਂ "ਵੇਵਫਾਰਮ ਸਾਈਕਲ" ਲਈ ਇੱਕ ਮੁੱਲ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਦੇ ਹੋ, ਤਾਂ STEVE-6D ਦੀ ਗਤੀ ਨੂੰ ਆਪਣੇ ਆਪ ਬੰਦ ਕਰਨਾ ਸੰਭਵ ਹੈ। ਮੁੱਲ ਨੂੰ ਬੇਅੰਤ [2] 'ਤੇ ਸੈੱਟ ਕਰੋ ਜਾਂ ਗਿਣਤੀਆਂ ਦੀ ਗਿਣਤੀ ਲਈ ਇੱਕ ਮੁੱਲ ਚੁਣੋ [1] iQ-ਟ੍ਰਿਗਰ ਨੂੰ ਟਰਿੱਗਰ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ, ਜਾਂ ਵੇਵਫਾਰਮ ਨੂੰ ਲਾਗੂ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ।
ਡੇਟਾ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰੋ
"ਡਾਟਾ ਵਿਸ਼ਲੇਸ਼ਣ" ਮੋਡੀਊਲ ਚਿੱਤਰ ਸਥਿਰਤਾ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ। ਇਸ ਮੋਡੀਊਲ ਦੇ ਤਿੰਨ ਮਹੱਤਵਪੂਰਨ ਭਾਗ ਹਨ। ਪਹਿਲਾ ਭਾਗ "ਮੈਟਾਡੇਟਾ ਟੂਲ" [1] ਹੈ, ਜੋ ਕੈਮਰਾ ਮੈਟਾਡੇਟਾ ਸੈੱਟ ਕਰਦਾ ਹੈ। ਦੂਜਾ
ਹਿੱਸਾ IS-ਪ੍ਰਦਰਸ਼ਨ ਗਣਨਾ [2] ਲਈ ਚਿੱਤਰ ਬੈਚ ਪ੍ਰੋਸੈਸਿੰਗ ਹੈ। ਅੰਤਮ ਭਾਗ ਕੈਪਚਰ ਕੀਤੇ ਚਿੱਤਰਾਂ ਦੇ ਨਤੀਜਿਆਂ ਨੂੰ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦਾ ਹੈ।
ਮੈਟਾਡਾਟਾ
IS-ਪ੍ਰਦਰਸ਼ਨ ਗਣਨਾਵਾਂ ਜਿਵੇਂ ਕਿ ਪਿਕਸਲ ਪਿੱਚ ਅਤੇ ਸ਼ਟਰ ਟਾਈਮ ਲਈ ਕੈਮਰਾ ਮੈਟਾਡੇਟਾ ਜਾਣਕਾਰੀ ਹੋਣਾ ਜ਼ਰੂਰੀ ਹੈ। ਜੇਕਰ ਕੈਮਰਾ ਇਸ ਜਾਣਕਾਰੀ ਨੂੰ ਚਿੱਤਰ ਵਿੱਚ ਰਿਕਾਰਡ ਨਹੀਂ ਕਰਦਾ ਹੈ file, ਚਿੱਤਰਾਂ ਦਾ ਇੱਕ ਬੈਚ ਲੋਡ ਕਰੋ ਅਤੇ ਇਸਨੂੰ ਹੱਥੀਂ .jpg ਚਿੱਤਰ ਵਿੱਚ ਲਿਖੋ। ਚਿੱਤਰ ਲੋਡ ਕਰੋ, ਪੈਰਾਮੀਟਰ ਸੈੱਟ ਕਰੋ, ਅਤੇ ਫਿਰ "SET" ਬਟਨ ਨੂੰ ਦਬਾਓ।
ਸਿਰਫ਼ JPEG ਚਿੱਤਰਾਂ ਲਈ
IS-ਪ੍ਰਦਰਸ਼ਨ ਗਣਨਾ ਲਈ ਚਿੱਤਰ ਲੋਡ ਕਰੋ
ਇੱਕ ਵਾਰ ਹਵਾਲਾ ਲੜੀ ਲੋਡ ਹੋਣ ਤੋਂ ਬਾਅਦ, IS-ON ਲਈ ਇੱਕ ਟੈਸਟ ਲੜੀ ਚੁਣੋ। ISOFF ਲਈ ਘੱਟੋ-ਘੱਟ ਇੱਕ ਚਿੱਤਰ ਲੜੀ ਦੀ ਲੋੜ ਹੈ। ਜੇਕਰ CIPA ਹੈਂਡਸ਼ੇਕ ਵੇਵਫਾਰਮ ਵਰਤਿਆ ਗਿਆ ਸੀ, ਤਾਂ IS-OFF ਲਈ ਟੈਸਟ ਸੀਰੀਜ਼ ਦੀ ਲੋੜ ਨਹੀਂ ਹੈ।
ਇਸ ਦੀ ਬਜਾਏ, CIPA ਲਈ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ ਅਤੇ ਫਿਰ ਕੈਮਰੇ ਦਾ ਭਾਰ ਚੁਣੋ। ਕਸਟਮ ਵੇਵਫਾਰਮ ਮਾਪਾਂ ਤੋਂ ਚਿੱਤਰਾਂ ਨੂੰ ਕਸਟਮ ਮੋਸ਼ਨ ਡੇਟਾ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਲੋਡ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। "ਚਿੱਤਰ ਕੇਂਦਰ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰੋ
ਸਿਰਫ਼” ਚੈਕਬਾਕਸ ਤੇਜ਼ ਪਰ ਘੱਟ ਸਟੀਕ ਡੇਟਾ ਲਈ ਉਪਲਬਧ ਹੈ। ਇਸ ਵਿਕਲਪ ਦੀ ਚੋਣ ਕਰਦੇ ਸਮੇਂ, ਗਣਨਾ ਦੌਰਾਨ ਸਿਰਫ ਮੱਧ ਕਿਨਾਰੇ ਵਾਲੇ ਬਕਸੇ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।

ਇੱਕ ਵਾਰ ਵਿਕਲਪ ਚੁਣੇ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਇੱਕ ਰੁੱਖ view ਵੱਖ-ਵੱਖ ਲੜੀ ਦੇ ਦਿਖਾਈ ਦੇਵੇਗਾ, ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਦੇਖਿਆ ਗਿਆ ਹੈ। ਜੇਕਰ ਕੋਈ ਚਿੱਤਰ ਮੈਟਾਡੇਟਾ ਉਪਲਬਧ ਨਹੀਂ ਹੈ, ਤਾਂ "ਮੈਟਾਡੇਟਾ ਟੂਲ" ਦੀ ਵਰਤੋਂ ਕਰੋ, ਜੋ ਕਿ ਇੱਕ ਗਲਤੀ ਸੁਨੇਹੇ ਦੁਆਰਾ ਦਰਸਾਇਆ ਗਿਆ ਹੈ
ਚਿੱਤਰਾਂ ਨੂੰ STEVE-6D ਸੌਫਟਵੇਅਰ ਵਿੱਚ ਲੋਡ ਕਰਨ ਤੋਂ ਬਾਅਦ। ਇੱਕ ਵਾਰ ਪੂਰਾ ਹੋਣ 'ਤੇ, ਚਿੱਤਰ ਸਥਿਰਤਾ ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਗਣਨਾ ਨੂੰ "ਪ੍ਰਕਿਰਿਆ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਸ਼ੁਰੂ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਇੱਕ ਨਤੀਜਾ file ਸਿੰਗਲ ਕਿਨਾਰੇ ਦੇ ਨਾਲ ਚੌੜਾਈ ਦੀ ਗਣਨਾ ਚਿੱਤਰਾਂ ਦੇ ਨਾਲ ਫੋਲਡਰ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕੀਤੀ ਜਾਵੇਗੀ।
| ਸਮਾਪਤੀ ਸਮਾਂ [s] | ਪਿੱਚ [ਪਿਕਸ] | ਯੌ [ਪਿਕਸ] | Sqrt(p^2+y^2) |
IS-ਕਾਰਗੁਜ਼ਾਰੀ
ਕਿਨਾਰੇ ਦੀ ਚੌੜਾਈ μm ਬਨਾਮ ਐਕਸਪੋਜ਼ਰ ਸਮੇਂ ਵਿੱਚ IS-ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਗਣਨਾ ਕਰਦੀ ਹੈ। ISON ਅਤੇ IS-OFF (ਜਾਂ ਮੋਸ਼ਨ ਡੇਟਾ) ਲੜੀ ਦੇ ਕਿਨਾਰੇ ਦੀ ਚੌੜਾਈ ਨੂੰ ਇੱਕ ਪੋਸਟਕਾਰਡ ਦੇ ਆਕਾਰ ਵਿੱਚ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ viewਇਸ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ 65-80 ਸੈਂਟੀਮੀਟਰ ਦੀ ਦੂਰੀ ਬਣਾਉ। f-ਸਟਾਪਾਂ [2] ਵਿੱਚ ਚਿੱਤਰ ਸਥਿਰਤਾ ਪ੍ਰਦਰਸ਼ਨ 63μm [1] ਦੀ ਨਿਰਧਾਰਨ ਸੀਮਾ ਦੇ ਨਾਲ IS-ON ਅਤੇ IS-OFF ਕਰਵ ਦੇ ਇੰਟਰਸੈਕਸ਼ਨ ਬਿੰਦੂਆਂ ਦੁਆਰਾ ਸਥਿਤ ਹੈ। IS-ਪ੍ਰਦਰਸ਼ਨ ਦਾ ਸੰਖਿਆਤਮਕ ਮੁੱਲ f-ਸਟਾਪਾਂ ਵਿੱਚ ਪ੍ਰਦਰਸ਼ਿਤ ਹੁੰਦਾ ਹੈ।

ਨਤੀਜਾ ਡਾਟਾ ਚੋਣ
IS-ਪ੍ਰਦਰਸ਼ਨ ਗਣਨਾ ਦੇ ਇੱਕਲੇ ਨਤੀਜੇ ਚੁਣਨ ਲਈ, “SERIES” ਲਈ ਇੱਕ ਸਲਾਈਡਰ [1] ਨੂੰ ਹਿਲਾਓ।
“ਐਕਸਪੋਜ਼ਰ ਟਾਈਮ,” “ਤਸਵੀਰ,” ਜਾਂ “ROI” (ਦਿਲਚਸਪੀ ਦਾ ਖੇਤਰ)। ਇਹ ਚਾਲ ਡਿਸਪਲੇਅ ਨੂੰ ਬਦਲ ਦੇਵੇਗੀ
ਕਿਨਾਰੇ ਫੈਲਾਅ ਫੰਕਸ਼ਨ ("ESF") [3], ਸਥਾਨਿਕ ਬਾਰੰਬਾਰਤਾ ਪ੍ਰਤੀਕਿਰਿਆ ("SFR") [4], ਅਤੇ
“ਇਨਪੁਟ ਚਿੱਤਰ” [5] ਟੈਬ। ਵਿਸਤ੍ਰਿਤ ਜਾਣਕਾਰੀ ਨੂੰ “INFO” ਬਟਨ [6] ਨਾਲ ਦਿਖਾਇਆ ਜਾਂ ਲੁਕਾਇਆ ਜਾ ਸਕਦਾ ਹੈ।

ਕਿਨਾਰੇ ਫੈਲਾਅ ਫੰਕਸ਼ਨ (ESF)
ESF ਹਰ ਕਿਨਾਰੇ ਦੀ ਚੌੜਾਈ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ। ਇਸ ਤਰ੍ਹਾਂ, ਇੱਕ ਓਵਰampਇੱਕ ਚਿੱਤਰ ਦੇ LED slanted ਕਿਨਾਰੇ ROI ਨੂੰ ਹਰੇਕ ਚਿੱਤਰ ਤੋਂ ਗਿਣਿਆ ਜਾਂਦਾ ਹੈ। ਹਰੇਕ ਚਿੱਤਰ ਵਿੱਚ ਵੀਹ ਝੁਕੇ ਹੋਏ ਕਿਨਾਰੇ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ, ਜਿਸ ਵਿੱਚ ਪਿਚ ਵਿੱਚ ਦਸ ਅਤੇ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ
ਯੌ ਦਿਸ਼ਾ ਵਿੱਚ ਦਸ.
ਸਥਾਨਿਕ ਬਾਰੰਬਾਰਤਾ ਜਵਾਬ (SFR)
SFR ਦੀ ਵਰਤੋਂ IS-ਪ੍ਰਦਰਸ਼ਨ ਗਣਨਾ ਲਈ ਨਹੀਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਇਸ ਦੀ ਬਜਾਏ, ਇਹ ਹਰੇਕ ROI ਦੇ ਮੋਡੂਲੇਸ਼ਨ ਟ੍ਰਾਂਸਫਰ ਫੰਕਸ਼ਨ ਦਾ ਵਰਣਨ ਕਰਦਾ ਹੈ।
ਇਨਪੁਟ ਚਿੱਤਰ ਅਤੇ ROI ਚੋਣ
ਹਰ ਨਤੀਜੇ ਲਈ ਦਿਲਚਸਪੀ ਦੇ ਖੇਤਰ ਨੂੰ ਬਦਲਣਾ ਜਾਂ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਨਾ ਸੰਭਵ ਹੈ। "ROI ਸੰਪਾਦਿਤ ਕਰੋ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ ਅਤੇ ROI ਦਾ ਸਥਾਨ ਬਦਲੋ। ਇੱਕ ਨਵਾਂ ROI ਸੈੱਟ ਕਰਨ ਲਈ, ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ, ਅਤੇ ROI ਨੂੰ ਮਿਟਾਉਣ ਲਈ "-" ਬਟਨ ਦੀ ਵਰਤੋਂ ਕਰੋ। ਜ਼ੂਮਿੰਗ ਪ੍ਰਭਾਵ ਲਈ, "ਜ਼ੂਮ +" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ ਅਤੇ ਚਿੱਤਰ 'ਤੇ ਇਕ ਆਇਤਕਾਰ ਖਿੱਚੋ।
ਅਸ਼ੁੱਧੀ ਨੂੰ ਸੰਭਾਲਣਾ
ਜੇਕਰ ਸਾਫਟਵੇਅਰ ਚਿੱਤਰਾਂ ਵਿੱਚੋਂ ਇੱਕ 'ਤੇ ਸਾਰੇ 20 ROI ਦਾ ਪਤਾ ਨਹੀਂ ਲਗਾਉਂਦਾ ਹੈ, ਤਾਂ ਇੰਪੁੱਟ ਚਿੱਤਰ ਸੂਚੀ ਦੇ ਦੌਰਾਨ ਇੱਕ ਗਲਤੀ ਆਈ ਹੈ view. ਜੇਕਰ ਅਜਿਹਾ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਕਿਰਪਾ ਕਰਕੇ ਚਿੱਤਰ ਦੀ ਚੋਣ ਕਰੋ ਅਤੇ ਚਿੱਤਰ ਲਈ ਗੁੰਮ ROIs ਨੂੰ ਹੱਥੀਂ ਪਰਿਭਾਸ਼ਿਤ ਕਰੋ।
Cਅਧਿਕਾਰ Iਸੂਚਨਾ
ਇਸ ਸੌਫਟਵੇਅਰ ਨੂੰ ਸਥਾਪਿਤ ਕਰਕੇ, ਤੁਸੀਂ ਹੇਠਾਂ ਦਿਸਣ ਵਾਲੇ ਸਾਫਟਵੇਅਰ ਲਾਇਸੈਂਸ ਸਮਝੌਤੇ ਦੀਆਂ ਸ਼ਰਤਾਂ ਨੂੰ ਸਵੀਕਾਰ ਕਰਦੇ ਹੋ ਅਤੇ ਉਹਨਾਂ ਦੁਆਰਾ ਬੰਨ੍ਹੇ ਜਾਣ ਲਈ ਸਹਿਮਤ ਹੁੰਦੇ ਹੋ।
ਕਾਪੀਰਾਈਟ © ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ ਜੀ.ਐੱਮ.ਬੀ.ਐੱਚ. ਐਂਡ ਕੰਪਨੀ ਕੇ.ਜੀ., 2021
ਇਸ ਇਕਰਾਰਨਾਮੇ ਦੇ ਤਹਿਤ ਪੇਸ਼ ਕੀਤਾ ਗਿਆ ਸੌਫਟਵੇਅਰ "ਜਿਵੇਂ ਹੈ" ਦੇ ਆਧਾਰ 'ਤੇ ਪ੍ਰਦਾਨ ਕੀਤਾ ਗਿਆ ਹੈ, ਬਿਨਾਂ ਕਿਸੇ ਵਾਰੰਟੀ ਜਾਂ ਪ੍ਰਤੀਨਿਧਤਾਵਾਂ ਦੇ ਸਪੱਸ਼ਟ ਜਾਂ ਅਪ੍ਰਤੱਖ, ਜਿਸ ਵਿੱਚ ਕਿਸੇ ਖਾਸ ਉਦੇਸ਼ ਲਈ ਵਪਾਰਕਤਾ ਜਾਂ ਫਿਟਨੈਸ ਦੀ ਕੋਈ ਵੀ ਅਪ੍ਰਤੱਖ ਵਾਰੰਟੀ ਸ਼ਾਮਲ ਹੈ, ਪਰ ਇਸ ਤੱਕ ਸੀਮਿਤ ਨਹੀਂ ਹੈ। ਕਿਸੇ ਖਾਸ ਉਦੇਸ਼ ਜਾਂ ਵਰਤੋਂ ਲਈ ਸੌਫਟਵੇਅਰ ਦੀ ਅਨੁਕੂਲਤਾ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨਾ ਸਿਰਫ਼ ਉਪਭੋਗਤਾ ਦੀ ਜ਼ਿੰਮੇਵਾਰੀ ਹੈ। ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ GmbH & Co.
KG, ਅਤੇ ਕੋਈ ਹੋਰ ਜੋ ਇਸ ਸੌਫਟਵੇਅਰ ਦੀ ਸਿਰਜਣਾ, ਉਤਪਾਦਨ, ਡਿਲੀਵਰੀ, ਜਾਂ ਸਮਰਥਨ ਵਿੱਚ ਸ਼ਾਮਲ ਹੋਇਆ ਹੈ, ਕਿਸੇ ਵੀ ਸਥਿਤੀ ਵਿੱਚ ਕਿਸੇ ਵੀ ਨੁਕਸ, ਗਲਤੀ, ਜਾਂ ਭੁੱਲ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਸਿੱਧੇ, ਅਸਿੱਧੇ, ਵਿਸ਼ੇਸ਼, ਪਰਿਣਾਮੀ, ਜਾਂ ਇਤਫਾਕਨ ਨੁਕਸਾਨਾਂ ਲਈ ਜ਼ਿੰਮੇਵਾਰ ਨਹੀਂ ਹੋਵੇਗਾ। ਡਿਸਕੇਟ ਜਾਂ ਸੌਫਟਵੇਅਰ ਵਿੱਚ ਜਾਂ ਕਿਸੇ ਹੋਰ ਸਮਾਗਮਾਂ ਤੋਂ, ਜਿਸ ਵਿੱਚ ਸੇਵਾ ਵਿੱਚ ਕੋਈ ਰੁਕਾਵਟ, ਲਾਭ ਜਾਂ ਸਦਭਾਵਨਾ ਦਾ ਨੁਕਸਾਨ, ਕਾਨੂੰਨੀ ਕਾਰਵਾਈ ਜਾਂ ਕੋਈ ਹੋਰ ਨਤੀਜੇ ਵਜੋਂ ਨੁਕਸਾਨ ਸ਼ਾਮਲ ਹਨ, ਪਰ ਇਸ ਤੱਕ ਸੀਮਿਤ ਨਹੀਂ। ਉਪਭੋਗਤਾ ਇਸ ਸੌਫਟਵੇਅਰ ਦੀ ਵਰਤੋਂ ਕਰਨ ਤੋਂ ਪੈਦਾ ਹੋਣ ਵਾਲੀ ਸਾਰੀ ਜ਼ਿੰਮੇਵਾਰੀ ਲੈਂਦਾ ਹੈ, ਜਿਸ ਲਈ ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ ਜੀ.ਐੱਮ.ਬੀ.ਐੱਚ. ਐਂਡ ਕੰਪਨੀ ਕੇ.ਜੀ. ਦੀ ਕੋਈ ਜ਼ਿੰਮੇਵਾਰੀ ਨਹੀਂ ਹੋਵੇਗੀ, ਚਾਹੇ ਅਜਿਹੀ ਵਰਤੋਂ ਕਾਨੂੰਨੀ ਜਾਂ ਅਨੁਮਾਨਤ ਹੋਵੇ। ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ GmbH & Co. KG ਕੋਲ ਇਸ ਸੌਫਟਵੇਅਰ ਦੁਆਰਾ ਸਟੋਰ ਕੀਤੇ ਜਾਂ ਵਰਤੇ ਗਏ ਕਿਸੇ ਵੀ ਡੇਟਾ ਜਾਂ ਪ੍ਰੋਗਰਾਮਾਂ ਲਈ ਕੋਈ ਦੇਣਦਾਰੀ ਨਹੀਂ ਹੋਵੇਗੀ, ਜਿਸ ਵਿੱਚ ਅਜਿਹੇ ਡੇਟਾ ਜਾਂ ਪ੍ਰੋਗਰਾਮਾਂ ਨੂੰ ਮੁੜ ਪ੍ਰਾਪਤ ਕਰਨ ਦੇ ਖਰਚੇ ਸ਼ਾਮਲ ਹਨ। ਇਮੇਜ ਇੰਜਨੀਅਰਿੰਗ GmbH & Co. KG ਬਿਨਾਂ ਨੋਟਿਸ ਦਿੱਤੇ ਕਿਸੇ ਵੀ ਸਮੇਂ ਪ੍ਰਦਾਨ ਕੀਤੀ ਜਾਣਕਾਰੀ ਅਤੇ ਸੰਬੰਧਿਤ ਸੌਫਟਵੇਅਰ ਵਿੱਚ ਸੁਧਾਰ ਜਾਂ ਸੁਧਾਰ ਕਰਨ ਦਾ ਅਧਿਕਾਰ ਰਾਖਵਾਂ ਰੱਖਦਾ ਹੈ।
ਇਸ ਮੈਨੂਅਲ ਬਾਰੇ ਹੋਰ ਪੜ੍ਹੋ ਅਤੇ PDF ਡਾਊਨਲੋਡ ਕਰੋ:
ਦਸਤਾਵੇਜ਼ / ਸਰੋਤ
 |
ਚਿੱਤਰ ਇੰਜੀਨੀਅਰਿੰਗ STEVE-6D [pdf] ਯੂਜ਼ਰ ਮੈਨੂਅਲ ਸਟੀਵ-6ਡੀ, ਸਟੀਵ |



