Nanotic NanoLib C++ Programming
Product Information
Specifications
- Product Name: NanoLib
- Programming Language: C++
- Product Version: 1.3.0
- User Manual Version: 1.4.2
The NanoLib library is designed for programming control software for Nanotec controllers. It provides a user interface, core functionalities, and communication libraries to facilitate the development of control applications.
Product Usage Instructions
- Before You Start:
- Ensure that your system meets the hardware requirements specified in the manual. The intended audience for this product includes developers looking to create control software for Nanotec controllers.
- Getting Started:
- To begin using NanoLib, follow these steps:
- Start by importing NanoLib into your project.
- Configure your project settings as needed.
- Build your project to incorporate NanoLib functionalities.
- Creating Projects:
- You can create projects for both Windows and Linux environments. Follow the specific instructions provided in the manual for each platform.
- Classes / Functions Reference:
- Refer to the user manual for a detailed guide on the classes and functions available in NanoLib for programming control software.
FAQs
- Q: What is the purpose of NanoLib?
- A: NanoLib is a library for programming control software for Nanotec controllers, providing essential functionalities and communication capabilities.
- Q: How can I get started with NanoLib?
- A: Begin by importing NanoLib into your project, configuring project settings, and building your project to utilize NanoLib features.
“`
User Manual NanoLib
C++
Valid with product version 1.3.0
User Manual Version: 1.4.2
Document aim and conventions
This document describes the setup and use of the NanoLib library and contains a reference to all classes and functions for programming your own control software for Nanotec controllers. We use the following typefaces:
Underlined text marks a cross reference or hyperlink.
Example 1: For exact instructions on the NanoLibAccessor, see Setup. Example 2: Install the Ixxat driver and connect the CAN-to-USB adapter. Italic text means: This is a named object, a menu path / item, a tab / file name or (if necessary) a foreignlanguage expression.
Example 1: Select File > New > Blank Document. Open the Tool tab and select Comment. Example 2: This document divides users (= Nutzer; usuario; utente; utilisateur; utente etc.) from:
– Third-party user (= Drittnutzer; tercero usuario; terceiro utente; tiers utilisateur; terzo utente etc.). – End user (= Endnutzer; usuario final; utente final; utilisateur final; utente finale etc.).
Courier marks code blocks or programming commands. Example 1: Via Bash, call sudo make install to copy shared objects; then call ldconfig. Example 2: Use the following NanoLibAccessor function to change the logging level in NanoLib:
// ***** C++ variant *****
void setLoggingLevel(LogLevel level);
Bold text emphasizes individual words of critical importance. Alternatively, bracketed exclamation marks emphasize the critical(!) importance.
Example 1: Protect yourself, others and your equipment. Follow our general safety notes that are generally applicable to all Nanotec products.
Example 2: For your own protection, also follow specific safety notes that apply to this specific product. The verb to co-click means a click via secondary mouse key to open a context menu etc.
Example 1: Co-click on the file, select Rename, and rename the file. Example 2: To check the properties, co-click on the file and select Properties.
Version: doc 1.4.2 / NanoLib 1.3.0
4
Before you start
Before you start using NanoLib, do prepare your PC and inform yourself about the intended use and the library limitations.
2.1 System and hardware requirements

NOTICE Malfunction from 32-bit operation or discontinued system! Use, and consistently maintain, a 64-bit system. Observe OEM discontinuations and ~instructions.
NanoLib 1.3.0 supports all Nanotec products with CANopen, Modbus RTU (also USB on virtual com port), Modbus TCP, EtherCat, and Profinet. For older NanoLibs: See changelog in the imprint. At your risk only: legacy-system use. Note: Follow valid OEM instructions to set the latency as low as possible if you face problems when using an FTDI-based USB adapter.
Requirements (64-bit system mandatory)
Windows 10 or 11 w/ Visual Studio 2019 version 16.8 or later and Windows SDK 10.0.20348.0 (version 2104) or later
C++ redistributables 2017 or higher CANopen: Ixxat VCI or PCAN basic driver (optional) EtherCat module / Profinet DCP: Npcap or WinPcap RESTful module: Npcap, WinPcap, or admin permission to
communicate w/ Ethernet bootloaders
Linux w/ Ubuntu 20.04 LTS to 24 (all x64 and arm64)
Kernel headers and libpopt-dev packet Profinet DCP: CAP_NET_ADMIN and CAP_NET_RAW abili-
ties CANopen: Ixxat ECI driver or Peak PCAN-USB adapter EtherCat: CAP_NET_ADMIN, CAP_NET_RAW and
CAP_SYS_NICE abilities RESTful: CAP_NET_ADMIN ability to communicate w/ Eth-
ernet bootloaders (also recommended: CAP_NET_RAW)
Language, fieldbus adapters, cables
C++ GCC 7 or higher (Linux)
EtherCAT: Ethernet cable VCP / USB hub: now uniform USB USB mass storage: USB cable REST: Ethernet cable CANopen: Ixxat USB-to-CAN V2; Na-
notec ZK-USB-CAN-1, Peak PCANUSB adapter No Ixxat support for Ubuntu on arm64
Modbus RTU: Nanotec ZK-USB-RS485-1 or equivalent adapter; USB cable on virtual com port (VCP)
Modbus TCP: Ethernet cable as per product datasheet
2.2 Intended use and audience
NanoLib is a program library and software component for the operation of, and communication with, Nanotec controllers in a wide range of industrial applications and for duly skilled programmers only.
Due to real-time incapable hardware (PC) and operating system, NanoLib is not for use in applications that need synchronous multi-axis movement or are generally time-sensitive.
In no case may you integrate NanoLib as a safety component into a product or system. On delivery to end users, you must add corresponding warning notices and instructions for safe use and safe operation to each product with a Nanotec-manufactured component. You must pass all Nanotec-issued warning notices right to the end user.
2.3 Scope of delivery and warranty
NanoLib comes as a *.zip folder from our download website for either EMEA / APAC or AMERICA. Duly store and unzip your download before setup. The NanoLib package contains:
Version: doc 1.4.2 / NanoLib 1.3.0
5
2 Before you start
Interface headers as source code (API)
Core functions as libraries in binary format: nano-
Libraries that facilitate communication: nanolibm_ lib.dll
[yourfieldbus].dll etc.Example project: Example.sln (Visual Studio
project) and example.cpp (main file)
For scope of warranty, please observe a) our terms and conditions for either EMEA / APAC or AMERICA and b) all license terms. Note: Nanotec is not liable for faulty or undue quality, handling, installation, operation, use, and maintenance of third-party equipment! For due safety, always follow valid OEM instructions.
Version: doc 1.4.2 / NanoLib 1.3.0
6
The NanoLib architecture
NanoLib’s modular software structure lets you arrange freely customizable motor controller / fieldbus functions around a strictly pre-built core. NanoLib contains the following modules:
User interface (API)
NanoLib core
Interface and helper classes which Libraries which
Communication libraries Fieldbus-specific libraries which
access you to your controller’s implement the API functionality do interface between NanoLib
OD (object dictionary)
interact with bus libraries.
core and bus hardware.
base on the NanoLib core func-
tionalities.
3.1 User interface
The user interface consists of header interface files you can use to access the controller parameters. The user interface classes as described in the Classes / functions reference allow you to:
Connect to both the hardware (fieldbus adapter) and the controller device. Access the OD of the device, to read/write the controller parameters.
3.2 NanoLib core
The NanoLib core comes with the import library nanolib.lib. It implements the user interface functionality and is responsible for:
Loading and managing the communication libraries. Providing the user interface functionalities in the NanoLibAccessor. This communication entry point de-
fines a set of operations you can execute on the NanoLib core and communication libraries.
3.3 Communication libraries
In addition to nanotec.services.nanolib.dll (useful for your optional Plug & Drive Studio), NanoLib offers the following communication libraries:
nanolibm_canopen.dll nanolibm_modbus.dll
nanolibm_ethercat.dll nanolibm_restful-api.dll
nanolibm_usbmmsc.dll nanolibm_profinet.dll
All libraries lay a hardware abstraction layer between core and controller. The core loads them at startup from the designated project folder and uses them to establish communication with the controller by corresponding protocol.
Version: doc 1.4.2 / NanoLib 1.3.0
7
Getting started
Read how to set up NanoLib for your operating system duly and how to connect hardware as needed.
4.1 Prepare your system
Before installing the adapter drivers, do prepare your PC along the operating system first. To prepare the PC along your Windows OS, install MS Visual Studio with C++ extensions. To install make and gcc by Linux Bash, call sudo apt install build-essentials. Do then enable CAP_NET_ADMIN, CAP_NET_RAW, and CAP_SYS_NICE capabilities for the application that uses NanoLib: 1. Call sudo setcap ‘cap_net_admin,cap_net_raw,cap_sys_nice+eip’ <application_
name>. 2. Only then, install your adapter drivers.
4.2 Install the Ixxat adapter driver for Windows
Only after due driver installation, you may use Ixxat’s USB-to-CAN V2 adapter. Read the USB drives’ product manual, to learn if / how to activate the virtual comport (VCP). 1. Download and install Ixxat’s VCI 4 driver for Windows from www.ixxat.com. 2. Connect Ixxat’s USB-to-CAN V2 compact adapter to the PC via USB. 3. By Device Manager: Check if both driver and adapter are duly installed/recognized.
4.3 Install the Peak adapter driver for Windows
Only after due driver installation, you may use Peak’s PCAN-USB adapter. Read the USB drives’ product manual, to learn if / how to activate the virtual comport (VCP). 1. Download and install the Windows device driver setup (= installation package w/ device drivers, tools, and
APIs) from http://www.peak-system.com. 2. Connect Peak’s PCAN-USB adapter to the PC via USB. 3. By Device Manager: Check if both driver and adapter are duly installed/recognized.
4.4 Install the Ixxat adapter driver for Linux
Only after due driver installation, you may use Ixxat’s USB-to-CAN V2 adapter. Note: Other supported adapters need your permissions by sudo chmod +777/dev/ttyACM* (* device number). Read the USB drives’ product manual, to learn if / how to activate the virtual comport (VCP). 1. Install the software needed for the ECI driver and demo application:
sudo apt-get update apt-get install libusb-1.0-0-dev libusb-0.1-4 libc6 libstdc++6 libgcc1 buildessential
2. Download the ECI-for-Linux driver from www.ixxat.com. Unzip it via:
unzip eci_driver_linux_amd64.zip
3. Install the driver via:
cd /EciLinux_amd/src/KernelModule sudo make install-usb
4. Check for successful driver installation by compiling and starting the demo application:
cd /EciLinux_amd/src/EciDemos/ sudo make cd /EciLinux_amd/bin/release/ ./LinuxEciDemo
Version: doc 1.4.2 / NanoLib 1.3.0
8
4 Getting started
4.5 Install the Peak adapter driver for Linux
Only after due driver installation, you may use Peak’s PCAN-USB adapter. Note: Other supported adapters need your permissions by sudo chmod +777/dev/ttyACM* (* device number). Read the USB drives’ product manual, to learn if / how to activate the virtual comport (VCP). 1. Check if your Linux has kernel headers: ls /usr/src/linux-headers-`uname -r`. If not, install
them: sudo apt-get install linux-headers-`uname -r` 2. Only now, install the libpopt-dev packet: sudo apt-get install libpopt-dev 3. Download the needed driver package (peak-linux-driver-xxx.tar.gz) from www.peak-system.com. 4. To unpack it, use: tar xzf peak-linux-driver-xxx.tar.gz 5. In the unpacked folder: Compile and install the drivers, PCAN base library, etc.: make all
sudo make install 6. To check the function, plug the PCAN-USB adapter in.
a) Check the kernel module:
lsmod | grep pcan b) … and the shared library:
ls -l /usr/lib/libpcan*
Note: If USB3 problems occur, use a USB2 port.
4.6 Connect your hardware
To be able to run a NanoLib project, connect a compatible Nanotec controller to the PC using your adapter. 1. By a suitable cable, connect your adapter to the controller. 2. Connect the adapter to the PC according to the adapter data sheet. 3. Power on the controller using a suitable power supply. 4. If needed, change the Nanotec controller’s communication settings as instructed in its product manual.
4.7 Load NanoLib
For a first start with quick-and-easy basics, you may (but must not) use our example project. 1. Depending on your region: Download NanoLib from our website for either EMEA / APAC or AMERICA. 2. Unzip the package’s files / folders and do select one option: For quick-and easy basics: See Starting the example project. For advanced customizing in Windows: See Creating your own Windows project. For advanced customizing in Linux: See Creating your own Linux project.
Version: doc 1.4.2 / NanoLib 1.3.0
9
Starting the example project
With NanoLib duly loaded, the example project shows you through NanoLib usage with a Nanotec controller. Note: For each step, comments in the provided example code explain the functions used. The example project consists of: the `*_functions_example.*’ files, which contain the implementations for the NanoLib interface functions the `*_callback_example.*’ files, which contain implementations for the various callbacks (scan, data and
logging) the `menu_*.*’ file, which contains the menu logic and code the Example.* file, which is the main program, creating the menu and initializing all used parameters the Sampler_example.* file, which contains the example implementation for sampler usage. You can find more examples, with some motion commands for various operation modes, in the Knowledge Base at nanotec.com. All are usable in Windows or Linux.
In Windows with Visual Studio 1. Open the Example.sln file. 2. Open the example.cpp. 3. Compile and run the example code.
In Linux via Bash 1. Unzip the source file, navigate to the folder with unzipped content. The main file for the example is
example.cpp. 2. In the bash, call:
a. “sudo make install” to copy the shared objects and call ldconfig. b. “make all” to build the test executable. 3. The bin folder contains an executable example file. By bash: Go to the output folder and type ./example. If no error occurs, your shared objects are now duly installed, and your library is ready for use. If the error reads ./example: error while loading shared libraries: libnanolib.so: cannot open shared object file: No such file or directory, the shared objects’ installation failed. In this case, follow the next steps. 4. Create a new folder within /usr/local/lib (admin rights needed). Into the bash, thus type:
sudo mkdir /usr/local/lib/nanotec
5. Copy all shared objects from the zip file’s lib folder:
install ./lib/*.so /usr/local/lib/nanotec/
6. Check the content of the target folder with:
ls -al /usr/local/lib/nanotec/
It should list the shared object files from the lib folder. 7. Run ldconfig on this folder:
sudo ldconfig /usr/local/lib/nanotec/
The example is implemented as a CLI application and provides a menu interface. The menu entries are context based and will be enabled or disabled, depending on the context state. They offer you the possibility to select and execute various library functions following the typical workflow for handling a controller: 1. Check the PC for connected hardware (adapters) and list them. 2. Establish connection to an adapter. 3. Scan the bus for connected controller devices. 4. Connect to a device.
Version: doc 1.4.2 / NanoLib 1.3.0
10
5 Starting the example project
5. Test one or more of the library functions: Read/write from/to the controller’s object dictionary, update the firmware, upload and run a NanoJ program, get the motor running and tune it, configure and use the logging/sampler.
6. Close the connection, first to the device, then to the adapter.
Version: doc 1.4.2 / NanoLib 1.3.0
11
Creating your own Windows project
Create, compile and run your own Windows project to use NanoLib.
6.1 Import NanoLib
Import the NanoLib header files and libraries via MS Visual Studio.
1. Open Visual Studio. 2. Via Create new project > Console App C++ > Next: Select a project type. 3. Name your project (here: NanolibTest) to create a project folder in the Solution Explorer. 4. Select Finish. 5. Open the windows file explorer and navigate to the new created project folder. 6. Create two new folders, inc and lib. 7. Open the NanoLib package folder. 8. From there: Copy the header files from the include folder into your project folder inc and all .lib and .dll
files to your new project folder lib. 9. Check your project folder for due structure, for example:
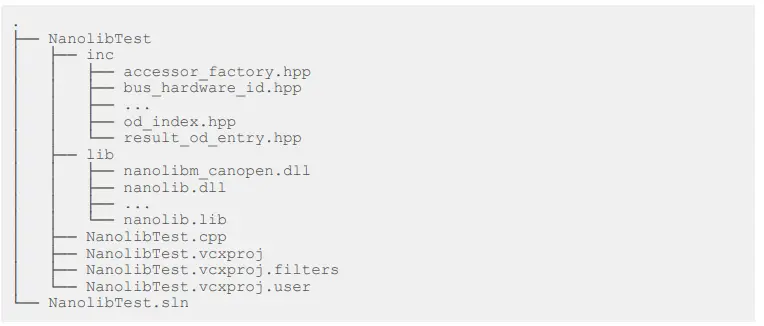 ect folder for due structure:
ect folder for due structure:
. NanolibTest inc accessor_factory.hpp bus_hardware_id.hpp … od_index.hpp result_od_entry.hpp lib nanolibm_canopen.dll nanolib.dll … nanolib.lib NanolibTest.cpp NanolibTest.vcxproj NanolibTest.vcxproj.filters NanolibTest.vcxproj.user NanolibTest.sln
6.2 Configure your project
Use the Solution Explorer in MS Visual Studio to set up NanoLib projects. Note: For correct NanoLib operation, select the release (not debug!) configuration in Visual C++ project settings; then build and link the project with VC runtimes of C++ redistributables [2022].
1. In the Solution Explorer: Go to your project folder (here: NanolibTest). 2. Co-click the folder to open the context menu. 3. Select Properties. 4. Activate All configurations and All platforms. 5. Select C/C++ and go to Additional Include Directories. 6. Insert: $(ProjectDir)Nanolib/includes;%(AdditionalIncludeDirectories) 7. Select Linker and go to Additional Library Directories. 8. Insert: $(ProjectDir)Nanolib;%(AdditionalLibraryDirectories) 9. Extend Linker and select Input. 10.Go to Additional Dependencies and insert: nanolib.lib;%(AdditionalDependencies) 11.Confirm via OK.
Version: doc 1.4.2 / NanoLib 1.3.0
12
6 Creating your own Windows project
12.Go to Configuration > C++ > Language > Language Standard > ISO C++17 Standard and set the language standard to C++17 (/std:c++17).
6.3 Build your project
Build your NanoLib project in MS Visual Studio. 1. Open the main *.cpp file (here: nanolib_example.cpp) and edit the code, if needs be. 2. Select Build > Configuration Manager. 3. Change Active solution platforms to x64. 4. Confirm via Close. 5. Select Build > Build solution. 6. No error? Check if your compile output duly reports:
1>—— Clean started: Project: NanolibTest, Configuration: Debug x64 —–========== Clean: 1 succeeded, 0 failed, 0 skipped ==========
Version: doc 1.4.2 / NanoLib 1.3.0
13
7 Creating your own Linux project
7 Creating your own Linux project
Create, compile and run your own Linux project to use NanoLib. 1. In the unzipped NanoLib installation kit: Open <root>/nanotec_nanolib. 2. Find all shared objects in the tar.gz file. 3. Select one option: Install each lib either with a Makefile or by hand.
7.1 Install the shared objects with Makefile
Use Makefile with Linux Bash to auto-install all default *.so files. 1. Via Bash: Go to the folder containing the makefile. 2. Copy the shared objects via:
sudo make install 3. Confirm via:
ldconfig
7.2 Install the shared objects by hand
Use a Bash to install all *.so files of NanoLib manually. 1. Via Bash: Create a new folder within /usr/local/lib. 2. Admin rights needed! Type:
sudo mkdir /usr/local/lib/nanotec 3. Change to the unzipped installation package folder. 4. Copy all shared objects from the lib folder via:
install ./nanotec_nanolib/lib/*.so /usr/local/lib/nanotec/ 5. Check the content of the target folder via:
ls -al /usr/local/lib/nanotec/ 6. Check if all shared objects from the lib folder are listed. 7. Run ldconfig on this folder via:
sudo ldconfig /usr/local/lib/nanotec/
7.3 Create your project
With your shared objects installed: Create a new project for your Linux NanoLib. 1. Via Bash: Create a new project folder (here: NanoLibTest) via:
mkdir NanoLibTest cd NanoLibTest
2. Copy the header files to an include folder (here: inc) via: mkdir inc cp /<PLACE WHERE THE CONTENT OF THE ZIP FILE IS>/nanotec_nanolib/inc/*.hpp inc
3. Create a main file (NanoLibTest.cpp) via: #include “accessor_factory.hpp” #include <iostream>
Version: doc 1.4.2 / NanoLib 1.3.0
14
7 Creating your own Linux project
int main(){ nlc::NanoLibAccessor *accessor = getNanoLibAccessor();
nlc::ResultBusHwIds result = accessor->listAvailableBusHardware();
if(result.hasError()) { std::cout << result.getError() << std::endl; }
else{ std::cout << “Success” << std::endl; }
delete accessor; return 0; }
4. Check your project folder for due structure:
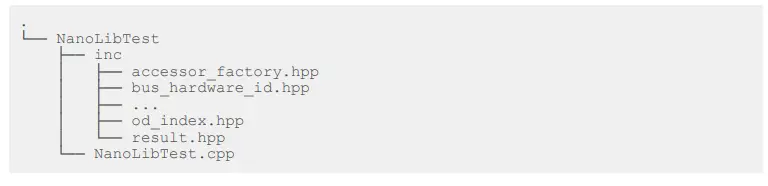
. NanoLibTest
inc accessor_factory.hpp bus_hardware_id.hpp … od_index.hpp result.hpp NanoLibTest.cpp
7.4 Compile and test your project
Make your Linux NanoLib ready for use via Bash.
1. Via Bash: Compile the main file via:
g++ -Wall -Wextra -pedantic -I./inc -c NanoLibTest.cpp -o NanoLibTest
2. Link the executable together via:
g++ -Wall -Wextra -pedantic -I./inc -o test NanoLibTest.o L/usr/local/lib/nanotec -lnanolib -ldl
3. Run the test program via:
./test
4. Check if your Bash duly reports:
success
Version: doc 1.4.2 / NanoLib 1.3.0
15
8 Classes / functions reference
8 Classes / functions reference
Find here a list of NanoLib’s user interface classes and their member functions. The typical description of a function includes a short introduction, the function definition and a parameter / return list:
ExampleFunction () Tells you briefly what the function does.
virtual void nlc::NanoLibAccessor::ExampleFunction (Param_a const & param_a, Param_b const & param_B)
Parameters param_a param_b
Returns ResultVoid
Additional comment if needed. Additional comment if needed.
8.1 NanoLibAccessor
Interface class used as entry point to the NanoLib. A typical workflow looks like this:
1. Start by scanning for hardware with NanoLibAccessor.listAvailableBusHardware (). 2. Set the communication settings with BusHardwareOptions (). 3. Open the hardware connection with NanoLibAccessor.openBusHardwareWithProtocol (). 4. Scan the bus for connected devices with NanoLibAccessor.scanDevices (). 5. Add a device with NanoLibAccessor.addDevice (). 6. Connect to the device with NanoLibAccessor.connectDevice (). 7. After finishing the operation, disconnect the device with NanoLibAccessor.disconnectDevice (). 8. Remove the device with NanoLibAccessor.removeDevice (). 9. Close the hardware connection with NanoLibAccessor.closeBusHardware ().
NanoLibAccessor has the following public member functions:
listAvailableBusHardware () Use this function to list available fieldbus hardware.
virtual ResultBusHwIds nlc::NanoLibAccessor::listAvailableBusHardware ()
Returns ResultBusHwIds
Delivers a fieldbus ID array.
openBusHardwareWithProtocol () Use this function to connect bus hardware.
virtual ResultVoid nlc::NanoLibAccessor::openBusHardwareWithProtocol (BusHardwareId const & busHwId, BusHardwareOptions const & busHwOpt)
Parameters busHwId busHwOpt
Returns ResultVoid
Specifies the fieldbus to open. Specifies fieldbus opening options. Confirms that a void function has run.
isBusHardwareOpen () Use this function to check if your fieldbus hardware connection is open.
virtual ResultVoid nlc::NanoLibAccessor::openBusHardwareWithProtocol (const BusHardwareId & busHwId, const BusHardwareOptions & busHwOpt)
Version: doc 1.4.2 / NanoLib 1.3.0
16
8 Classes / functions reference
Parameters BusHardwareId Returns true
false
Specifies each fieldbus to open. Hardware is open. Hardware is closed.
getProtocolSpecificAccessor () Use this function to get the protocol-specific accessor object.
virtual ResultVoid nlc::NanoLibAccessor::getProtocolSpecificAccessor (BusHardwareId const & busHwId)
Parameters busHwId Returns ResultVoid
Specifies the fieldbus to get the accessor for. Confirms that a void function has run.
getProfinetDCP () Use this function to return a reference to Profinet DCP interface.
virtual ProfinetDCP & getProfinetDCP ()
Returns ProfinetDCP
getSamplerInterface () Use this function to get a reference to the sampler interface.
virtual SamplerInterface & getSamplerInterface ()
Returns SamplerInterface
Refers to the sampler interface class.
setBusState () Use this function to set the bus-protocol-specific state.
virtual ResultVoid nlc::NanoLibAccessor::setBusState (const BusHardwareId & busHwId, const std::string & state)
Parameters busHwId state
Returns ResultVoid
Specifies the fieldbus to open. Assigns a bus-specific state as a string value. Confirms that a void function has run.
scanDevices () Use this function to scan for devices in the network.
virtual ResultDeviceIds nlc::NanoLibAccessor::scanDevices (const BusHardwareId & busHwId, NlcScanBusCallback* callback)
Parameters busHwId callback
Returns ResultDeviceIds IOError
Specifies the fieldbus to scan. NlcScanBusCallback progress tracer. Delivers a device ID array. Informs that a device is not found.
Version: doc 1.4.2 / NanoLib 1.3.0
17
8 Classes / functions reference
addDevice ()
Use this function to add a bus device described by deviceId to NanoLib’s internal device list, and to return deviceHandle for it.
virtual ResultDeviceHandle nlc::NanoLibAccessor::addDevice (DeviceId const & deviceId)
Parameters deviceId Returns ResultDeviceHandle
Specifies the device to add to the list. Delivers a device handle.
connectDevice () Use this function to connect a device by deviceHandle.
virtual ResultVoid nlc::NanoLibAccessor::connectDevice (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultVoid
IOError
Specifies what bus device NanoLib connects to. Confirms that a void function has run. Informs that a device is not found.
getDeviceName () Use this function to get a device’s name by deviceHandle.
virtual ResultString nlc::NanoLibAccessor::getDeviceName (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultString
Specifies what bus device NanoLib gets the name for. Delivers device names as a string.
getDeviceProductCode () Use this function to get a device’s product code by deviceHandle.
virtual ResultInt nlc::NanoLibAccessor::getDeviceProductCode (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultInt
Specifies what bus device NanoLib gets the product code for. Delivers product codes as an integer.
getDeviceVendorId () Use this function to get the device vendor ID by deviceHandle.
virtual ResultInt nlc::NanoLibAccessor::getDeviceVendorId (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultInt
ResourceUnavailable
Specifies what bus device NanoLib gets the vendor ID for. Delivers vendor ID’s as an integer. Informs that no data is found.
Version: doc 1.4.2 / NanoLib 1.3.0
18
8 Classes / functions reference
getDeviceId () Use this function to get a specific device’s ID from the NanoLib internal list.
virtual ResultDeviceId nlc::NanoLibAccessor::getDeviceId (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultDeviceId
Specifies what bus device NanoLib gets the device ID for. Delivers a device ID.
getDeviceIds () Use this function to get all devices’ ID from the NanoLib internal list.
virtual ResultDeviceIds nlc::NanoLibAccessor::getDeviceIds ()
Returns ResultDeviceIds
Delivers a device ID list.
getDeviceUid () Use this function to get a device’s unique ID (96 bit / 12 bytes) by deviceHandle.
virtual ResultArrayByte nlc::NanoLibAccessor::getDeviceUid (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultArrayByte
ResourceUnavailable
Specifies what bus device NanoLib gets the unique ID for. Delivers unique ID’s as a byte array. Informs that no data is found.
getDeviceSerialNumber () Use this function to get a device’s serial number by deviceHandle.
virtual ResultString NanolibAccessor::getDeviceSerialNumber (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultString
ResourceUnavailable
Specifies what bus device NanoLib gets the serial number for. Delivers serial numbers as a string. Informs that no data is found.
getDeviceHardwareGroup () Use this function to get a bus device’s hardware group by deviceHandle.
virtual ResultDeviceId nlc::NanoLibAccessor::getDeviceHardwareGroup (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultInt
Specifies what bus device NanoLib gets the hardware group for.
Delivers hardware groups as an integer.
getDeviceHardwareVersion () Use this function to get a bus device’s hardware version by deviceHandle.
virtual ResultDeviceId nlc::NanoLibAccessor::getDeviceHardwareVersion (DeviceHandle const deviceHandle)
Version: doc 1.4.2 / NanoLib 1.3.0
19
8 Classes / functions reference
Parameters deviceHandle
Returns
ResultString ResourceUnavailable
Specifies what bus device NanoLib gets the hardware version for. Delivers device names as a string. Informs that no data is found.
getDeviceFirmwareBuildId () Use this function to get a bus device’s firmware build ID by deviceHandle.
virtual ResultDeviceId nlc::NanoLibAccessor::getDeviceFirmwareBuildId (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultString
Specifies what bus device NanoLib gets the firmware build ID for.
Delivers device names as a string.
getDeviceBootloaderVersion () Use this function to get a bus device’s bootloader version by deviceHandle.
virtual ResultInt nlc::NanoLibAccessor::getDeviceBootloaderVersion (DeviceHandle const deviceHandle)
Parameters deviceHandle
Returns
ResultInt ResourceUnavailable
Specifies what bus device NanoLib gets the bootloader version for. Delivers bootloader versions as an integer. Informs that no data is found.
getDeviceBootloaderBuildId () Use this function to get a bus device’s bootloader build ID by deviceHandle.
virtual ResultDeviceId nlc::NanoLibAccessor:: (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultString
Specifies what bus device NanoLib gets the bootloader build ID for.
Delivers device names as a string.
rebootDevice () Use this function to reboot the device by deviceHandle.
virtual ResultVoid nlc::NanoLibAccessor::rebootDevice (const DeviceHandle deviceHandle)
Parameters deviceHandle Returns ResultVoid
Specifies the fieldbus to reboot. Confirms that a void function has run.
getDeviceState () Use this function to get the device-protocol-specific state.
virtual ResultString nlc::NanoLibAccessor::getDeviceState (DeviceHandle const deviceHandle)
Parameters deviceHandle
Specifies what bus device NanoLib gets the state for.
Version: doc 1.4.2 / NanoLib 1.3.0
20
8 Classes / functions reference
Returns ResultString
Delivers device names as a string.
setDeviceState () Use this function to set the device-protocol-specific state.
virtual ResultVoid nlc::NanoLibAccessor::setDeviceState (const DeviceHandle deviceHandle, const std::string & state)
Parameters deviceHandle state
Returns ResultVoid
Specifies what bus device NanoLib sets the state for. Assigns a bus-specific state as a string value. Confirms that a void function has run.
getConnectionState ()
Use this function to get a specific device’s last known connection state by deviceHandle (= Disconnected, Connected, ConnectedBootloader)
virtual ResultConnectionState nlc::NanoLibAccessor::getConnectionState (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultConnectionState
Specifies what bus device NanoLib gets the connection state for.
Delivers a connection state (= Disconnected, Connected, ConnectedBootloader).
checkConnectionState ()
Only if the last known state was not Disconnected: Use this function to check and possibly update a specific device’s connection state by deviceHandle and by testing several mode-specific operations.
virtual ResultConnectionState nlc::NanoLibAccessor::checkConnectionState (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultConnectionState
Specifies what bus device NanoLib checks the connection state for.
Delivers a connection state (= not Disconnected).
assignObjectDictionary () Use this manual function to assign an object dictionary (OD) to deviceHandle on your own.
virtual ResultObjectDictionary nlc::NanoLibAccessor::assignObjectDictionary (DeviceHandle const deviceHandle, ObjectDictionary const & objectDictionary)
Parameters deviceHandle objectDictionary
Returns ResultObjectDictionary
Specifies what bus device NanoLib assigns the OD to. Shows the properties of an object dictionary.
autoAssignObjectDictionary ()
Use this automatism to let NanoLib assign an object dictionary (OD) to deviceHandle. On finding and loading a suitable OD, NanoLib automatically assigns it to the device. Note: If a compatible OD is already loaded in the object library, NanoLib will automatically use it without scanning the submitted directory.
virtual ResultObjectDictionary nlc::NanoLibAccessor::autoAssignObjectDictionary (DeviceHandle const deviceHandle, const std::string & dictionariesLocationPath)
Version: doc 1.4.2 / NanoLib 1.3.0
21
8 Classes / functions reference
Parameters deviceHandle
Returns
dictionariesLocationPath ResultObjectDictionary
Specifies for which bus device NanoLib shall automatically scan for suitable OD’s. Specifies the path to the OD directory. Shows the properties of an object dictionary.
getAssignedObjectDictionary ()
Use this function to get the object dictionary assigned to a device by deviceHandle.
virtual ResultObjectDictionary nlc::NanoLibAccessor::getAssignedObjectDictionary (DeviceHandle const device
Handle)
Parameters deviceHandle Returns ResultObjectDictionary
Specifies what bus device NanoLib gets the assigned OD for. Shows the properties of an object dictionary.
getObjectDictionaryLibrary () This function returns an OdLibrary reference.
virtual OdLibrary& nlc::NanoLibAccessor::getObjectDictionaryLibrary ()
Returns OdLibrary&
Opens the entire OD library and its object dictionaries.
setLoggingLevel () Use this function to set the needed log detailing (and log file size). Default level is Info.
virtual void nlc::NanoLibAccessor::setLoggingLevel (LogLevel level)
Parameters level
The following log detailings are possible:
0 = Trace 1 = Debug 2 = Info 3 = Warn 4 = Error 5 = Critical 6 = Off
Lowest level (largest log file); logs any feasible detail, plus software start / stop. Logs debug information (= interim results, content sent or received, etc.) Default level; logs informational messages. Logs problems that did occur but won’t stop the current algorithm. Logs just severe trouble that did stop the algorithm. Highest level (smallest log file); turns logging off; no further log at all. No logging at all.
setLoggingCallback ()
Use this function to set a logging callback pointer and log module (= library) for that callback (not for the logger itself).
virtual void nlc::NanoLibAccessor::setLoggingCallback (NlcLoggingCallback* callback, const nlc::LogModule & logModule)
Parameters *callback logModule
Sets a callback pointer. Tunes the callback (not logger!) to your library.
0 = NanolibCore 1 = NanolibCANopen 2 = NanolibModbus 3 = NanolibEtherCAT
Activates a callback for NanoLib’s core only. Activates a CANopen-only callback. Activates a Modbus-only callback. Activates an EtherCAT-only callback.
Version: doc 1.4.2 / NanoLib 1.3.0
22
8 Classes / functions reference
4 = NanolibRest 5 = NanolibUSB
Activates a REST-only callback. Activates a USB-only callback.
unsetLoggingCallback () Use this function to cancel a logging callback pointer.
virtual void nlc::NanoLibAccessor::unsetLoggingCallback ()
readNumber () Use this function to read a numeric value from the object dictionary.
virtual ResultInt nlc::NanoLibAccessor::readNumber (const DeviceHandle deviceHandle, const OdIndex odIndex)
Parameters deviceHandle odIndex
Returns ResultInt
Specifies what bus device NanoLib reads from. Specifies the (sub-) index to read from. Delivers an uninterpreted numeric value (can be signed, unsigned, fix16.16 bit values).
readNumberArray () Use this function to read numeric arrays from the object dictionary.
virtual ResultArrayInt nlc::NanoLibAccessor::readNumberArray (const DeviceHandle deviceHandle, const uint16_t index)
Parameters deviceHandle index
Returns ResultArrayInt
Specifies what bus device NanoLib reads from. Array object index. Delivers an integer array.
readBytes () Use this function to read arbitrary bytes (domain object data) from the object dictionary.
virtual ResultArrayByte nlc::NanoLibAccessor::readBytes (const DeviceHandle deviceHandle, const OdIndex odIndex)
Parameters deviceHandle odIndex
Returns ResultArrayByte
Specifies what bus device NanoLib reads from. Specifies the (sub-) index to read from. Delivers a byte array.
readString () Use this function to read strings from the object directory.
virtual ResultString nlc::NanoLibAccessor::readString (const DeviceHandle deviceHandle, const OdIndex odIndex)
Parameters deviceHandle odIndex
Returns ResultString
Specifies what bus device NanoLib reads from. Specifies the (sub-) index to read from. Delivers device names as a string.
Version: doc 1.4.2 / NanoLib 1.3.0
23
8 Classes / functions reference
writeNumber () Use this function to write numeric values to the object directory.
virtual ResultVoid nlc::NanoLibAccessor::writeNumber (const DeviceHandle deviceHandle, int64_t value, const OdIndex odIndex, unsigned int bitLength)
Parameters deviceHandle value odIndex bitLength
Returns ResultVoid
Specifies what bus device NanoLib writes to. The uninterpreted value (can be signed, unsigned, fix 16.16). Specifies the (sub-) index to read from. Length in bit. Confirms that a void function has run.
writeBytes () Use this function to write arbitrary bytes (domain object data) to the object directory.
virtual ResultVoid nlc::NanoLibAccessor::writeBytes (const DeviceHandle deviceHandle, const std::vector <uint8_t> & data, const OdIndex odIndex)
Parameters deviceHandle data odIndex
Returns ResultVoid
Specifies what bus device NanoLib writes to. Byte vector / array. Specifies the (sub-) index to read from. Confirms that a void function has run.
uploadFirmware ()
Use this function to update your controller firmware.
virtual ResultVoid nlc::NanoLibAccessor::uploadFirmware (const DeviceHandle deviceHandle, const std::vector <uint8_t> & fwData, NlcDataTransferCallback* callback)
Parameters deviceHandle fwData NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Array containing firmware data. A data progress tracer. Confirms that a void function has run.
uploadFirmwareFromFile ()
Use this function to update your controller firmware by uploading its file.
virtual ResultVoid nlc::NanoLibAccessor::uploadFirmwareFromFile (const DeviceHandle deviceHandle, const std::string & absoluteFilePath, NlcDataTransferCallback* callback)
Parameters deviceHandle absoluteFilePath NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Path to file containing firmware data (std::string). A data progress tracer. Confirms that a void function has run.
Version: doc 1.4.2 / NanoLib 1.3.0
24
8 Classes / functions reference
uploadBootloader ()
Use this function to update your controller bootloader.
virtual ResultVoid nlc::NanoLibAccessor::uploadBootloader (const DeviceHandle deviceHandle, const std::vector <uint8_t> & btData, NlcDataTransferCallback* callback)
Parameters deviceHandle btData NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Array containing bootloader data. A data progress tracer. Confirms that a void function has run.
uploadBootloaderFromFile ()
Use this function to update your controller bootloader by uploading its file.
virtual ResultVoid nlc::NanoLibAccessor::uploadBootloaderFromFile (const DeviceHandle deviceHandle, const std::string & bootloaderAbsoluteFilePath, NlcDataTransferCallback* callback)
Parameters deviceHandle bootloaderAbsoluteFilePath NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Path to file containing bootloader data (std::string). A data progress tracer. Confirms that a void function has run.
uploadBootloaderFirmware ()
Use this function to update your controller bootloader and firmware.
virtual ResultVoid nlc::NanoLibAccessor::uploadBootloaderFirmware (const DeviceHandle deviceHandle, const std::vector <uint8_t> & btData, const std::vector <uint8_t> & fwData, NlcDataTransferCallback* callback)
Parameters deviceHandle btData fwData NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Array containing bootloader data. Array containing firmware data. A data progress tracer. Confirms that a void function has run.
uploadBootloaderFirmwareFromFile ()
Use this function to update your controller bootloader and firmware by uploading the files.
virtual ResultVoid nlc::NanoLibAccessor::uploadBootloaderFirmwareFromFile (const DeviceHandle deviceHandle, const std::string & bootloaderAbsoluteFilePath, const std::string & absoluteFilePath, NlcDataTransferCallback* callback)
Parameters deviceHandle bootloaderAbsoluteFilePath absoluteFilePath NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib updates. Path to file containing bootloader data (std::string). Path to file containing firmware data (uint8_t). A data progress tracer. Confirms that a void function has run.
Version: doc 1.4.2 / NanoLib 1.3.0
25
8 Classes / functions reference
uploadNanoJ ()
Use this public function to updload the NanoJ program to your controller.
virtual ResultVoid nlc::NanoLibAccessor::uploadNanoJ (DeviceHandle const deviceHandle, std::vector <uint8_t> const & vmmData, NlcDataTransferCallback* callback)
Parameters deviceHandle vmmData NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib uploads to. Array containing NanoJ data. A data progress tracer. Confirms that a void function has run.
uploadNanoJFromFile ()
Use this public function to updload the NanoJ program to your controller by uploading the file.
virtual ResultVoid nlc::NanoLibAccessor::uploadNanoJFromFile (const DeviceHandle deviceHandle, const std::string & absoluteFilePath, NlcDataTransferCallback* callback)
Parameters deviceHandle absoluteFilePath NlcDataTransferCallback
Returns ResultVoid
Specifies what bus device NanoLib uploads to. Path to file containing NanoJ data (std::string). A data progress tracer. Confirms that a void function has run.
disconnectDevice () Use this function to disconnect your device by deviceHandle.
virtual ResultVoid nlc::NanoLibAccessor::disconnectDevice (DeviceHandle const deviceHandle)
Parameters deviceHandle Returns ResultVoid
Specifies what bus device NanoLib disconnects from. Confirms that a void function has run.
removeDevice () Use this function to remove your device from NanoLib’s internal device list.
virtual ResultVoid nlc::NanoLibAccessor::removeDevice (const DeviceHandle deviceHandle)
Parameters deviceHandle Returns ResultVoid
Specifies what bus device NanoLib delists. Confirms that a void function has run.
closeBusHardware () Use this function to disconnect from your fieldbus hardware.
virtual ResultVoid nlc::NanoLibAccessor::closeBusHardware (BusHardwareId const & busHwId)
Parameters busHwId Returns ResultVoid
Specifies the fieldbus to disconnect from. Confirms that a void function has run.
Version: doc 1.4.2 / NanoLib 1.3.0
26
8 Classes / functions reference
8.2 BusHardwareId
Use this class to identify a bus hardware one-to-one or to distinguish different bus hardware from each other. This class (without setter functions to be immutable from creation on) also holds information on:
Hardware (= adapter name, network adapter etc.) Protocol to use (= Modbus TCP, CANopen etc.) Bus hardware specifier (= serial port name, MAC Friendly name
address etc.)
BusHardwareId () [1/3]
Constructor that creates a new bus hardware ID object.
nlc::BusHardwareId::BusHardwareId (std::string const & busHardware_, std::string const & protocol_, std::string const & hardwareSpecifier_, std::string const & name_)
Parameters busHardware_ protocol_ hardwareSpecifier_ extraHardwareSpecifier_ name_
Hardware type (= ZK-USB-CAN-1 etc.). Bus communication protocol (= CANopen etc.). The specifier of a hardware (= COM3 etc.). The extra specifier of the hardware (say, USB location info). A friendly name (= AdapterName (Port) etc. ).
BusHardwareId () [2/3]
Constructor that creates a new bus hardware ID object, with the option for an extra hardware speicifier.
nlc::BusHardwareId::BusHardwareId (std::string const & busHardware_, std::string const & protocol_, std::string const & hardwareSpecifier_, std::string const & extraHardwareSpecifier_, std::string const & name_)
Parameters busHardware_ protocol_ hardwareSpecifier_ extraHardwareSpecifier_ name_
Hardware type (= ZK-USB-CAN-1 etc.). Bus communication protocol (= CANopen etc.). The specifier of a hardware (= COM3 etc.). The extra specifier of the hardware (say, USB location info). A friendly name (= AdapterName (Port) etc. ).
BusHardwareId () [3/3] Constructor that copies an exisiting busHardwareId.
nlc::BusHardwareId::BusHardwareId (BusHardwareId const &)
nlc::BusHardwareId::BusHardwareId (BusHardwareId const &)
Parameters busHardwareId
Names the bus hardware ID to copy from.
equals () Compares a new bus hardware ID to existing ones.
bool nlc::BusHardwareId::equals (BusHardwareId const & other) const
Parameters other Returns true
Another object of the same class. If both are equal in all values.
Version: doc 1.4.2 / NanoLib 1.3.0
27
8 Classes / functions reference
false
If the values differ.
getBusHardware () Reads out the bus hardware string.
std::string nlc::BusHardwareId::getBusHardware () const
Returns string
getHardwareSpecifier () Reads out the bus hardware’s specifier string (= network name etc.).
std::string nlc::BusHardwareId::getHardwareSpecifier () const
Returns string
getExtraHardwareSpecifier () Reads out the bus extra hardware’s specifier string (= MAC address etc.).
std::string nlc::BusHardwareId::getExtraHardwareSpecifier () const
Returns string
getName () Reads out the bus hardware’s friendly name.
std::string nlc::BusHardwareId::getName () const
Returns string
getProtocol () Reads out the bus protocol string.
std::string nlc::BusHardwareId::getProtocol () const
Returns string
toString () Returns the bus hardware ID as a string.
std::string nlc::BusHardwareId::toString () const
Returns string
8.3 BusHardwareOptions
Find in this class, in a key-value list of strings, all options needed to open a bus hardware.
Version: doc 1.4.2 / NanoLib 1.3.0
28
8 Classes / functions reference
BusHardwareOptions () [1/2] Constructs a new bus hardware option object.
nlc::BusHardwareOptions::BusHardwareOptions () Use the function addOption () to add key-value pairs.
BusHardwareOptions () [2/2] Constructs a new bus hardware options object with the key-value map already in place.
nlc::BusHardwareOptions::BusHardwareOptions (std::map <std::string, std::string> const & options)
Parameters options
A map with options for the bus hardware to operate.
addOption () Creates additional keys and values.
void nlc::BusHardwareOptions::addOption (std::string const & key, std::string const & value)
Parameters key value
Example: BAUD_RATE_OPTIONS_NAME, see bus_hw_options_ defaults
Example: BAUD_RATE_1000K, see bus_hw_options_defaults
equals () Compares the BusHardwareOptions to existing ones.
bool nlc::BusHardwareOptions::equals (BusHardwareOptions const & other) const
Parameters other Returns true
false
Another object of the same class. If the other object has all of the exact same options. If the other object has different keys or values.
getOptions () Reads out all added key-value pairs.
std::map <std::string, std::string> nlc::BusHardwareOptions::getOptions () const
Returns string map
toString () Returns all keys / values as a string.
std::string nlc::BusHardwareId::toString () const
Returns string
8.4 BusHwOptionsDefault
This default configuration options class has the following public attributes:
Version: doc 1.4.2 / NanoLib 1.3.0
29
8 Classes / functions reference
const CanBus const Serial const RESTfulBus const EtherCATBus
canBus = CanBus () serial = Serial () restfulBus = RESTfulBus() ethercatBus = EtherCATBus()
8.5 CanBaudRate
Struct that contains CAN bus baudrates in the following public attributes:
const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string
BAUD_RATE_1000K = “1000k” BAUD_RATE_800K = “800k” BAUD_RATE_500K = “500k” BAUD_RATE_250K = “250k” BAUD_RATE_125K = “125k” BAUD_RATE_100K = “100k” BAUD_RATE_50K = “50k” BAUD_RATE_20K = “20k” BAUD_RATE_10K = “10k” BAUD_RATE_5K = “5k”
8.6 CanBus
Default configuration options class with the following public attributes:
const std::string const CanBaudRate const Ixxat
BAUD_RATE_OPTIONS_NAME = “can adapter baud rate” baudRate = CanBaudRate () ixxat = Ixxat ()
8.7 CanOpenNmtService
For the NMT service, this struct contains the CANopen NMT states as string values in the following public attributes:
const std::string const std::string const std::string const std::string const std::string
START = “START” STOP = “STOP” PRE_OPERATIONAL = “PRE_OPERATIONAL” RESET = “RESET” RESET_COMMUNICATION = “RESET_COMMUNICATION”
8.8 CanOpenNmtState
This struct contains the CANopen NMT states as string values in the following public attributes:
const std::string const std::string const std::string const std::string const std::string
STOPPED = “STOPPED” PRE_OPERATIONAL = “PRE_OPERATIONAL” OPERATIONAL = “OPERATIONAL” INITIALIZATION = “INITIALIZATION” UNKNOWN = “UNKNOWN”
8.9 EtherCATBus struct
This struct contains the EtherCAT communication configuration options in the following public attributes:
Version: doc 1.4.2 / NanoLib 1.3.0
30
8 Classes / functions reference
const std::string NETWORK_FIRMWARE_STATE_OP- Network state treated as firmware mode. Acceptable
TION_NAME = “Network Firmware State”
values (default = PRE_OPERATIONAL):
EtherCATState::PRE_OPERATIONAL EtherCATState::SAFE_OPERATIONAL EtherCATState::OPERATIONAL
const std::string DEFAULT_NETWORK_FIRMWARE_ STATE = “PRE_OPERATIONAL”
const std::string EXCLUSIVE_LOCK_TIMEOUT_OP- Timeout in milliseconds to acquire exclusive lock on
TION_NAME = “Shared Lock Timeout”
the network (default = 500 ms).
const unsigned int DEFAULT_EXCLUSIVE_LOCK_ TIMEOUT = “500”
const std::string SHARED_LOCK_TIMEOUT_OPTION_ Timeout in milliseconds to acquire shared lock on
NAME = “Shared Lock Timeout”
the network (default = 250 ms).
const unsigned int DEFAULT_SHARED_LOCK_TIMEOUT = “250”
const std::string READ_TIMEOUT_OPTION_NAME = Timeout in milliseconds for a read operation (default
“Read Timeout”
= 700 ms).
const unsigned int DEFAULT_READ_TIMEOUT = “700”
const std::string WRITE_TIMEOUT_OPTION_NAME = Timeout in milliseconds for a write operation (default
“Write Timeout”
= 200 ms).
const unsigned int DEFAULT_WRITE_TIMEOUT = “200”
const std::string READ_WRITE_ATTEMPTS_OPTION_ Maximum read or write attempts (non-zero values
NAME = “Read/Write Attempts”
only; default = 5).
const unsigned int DEFAULT_READ_WRITE_ATTEMPTS = “5”
const std::string CHANGE_NETWORK_STATE_ATTEMPTS_OPTION_NAME = “Change Network State Attempts”
Maximum number of attempts to alter the network state (non-zero values only; default = 10).
const unsigned int DEFAULT_CHANGE_NETWORK_ STATE_ATTEMPTS = “10”
const std::string PDO_IO_ENABLED_OPTION_NAME Enables or disables PDO processing for digital in- /
= “PDO IO Enabled”
outputs (“True” or “False” only; default = “True”).
const std::string DEFAULT_PDO_IO_ENABLED = “True”
8.10 EtherCATState struct
This struct contains the EtherCAT slave / network states as string values in the following public attributes. Note: Default state at power on is PRE_OPERATIONAL; NanoLib can provide no reliable “OPERATIONAL” state in a non-realtime operating system:
const std::string const std::string const std::string const std::string const std::string const std::string
NONE = “NONE” INIT = “INIT” PRE_OPERATIONAL = “PRE_OPERATIONAL” BOOT = “BOOT” SAFE_OPERATIONAL = “SAFE_OPERATIONAL” OPERATIONAL = “OPERATIONAL”
Version: doc 1.4.2 / NanoLib 1.3.0
31
8 Classes / functions reference
8.11 Ixxat
This struct holds all information for the Ixxat usb-to-can in the following public attributes:
const std::string
ADAPTER_BUS_NUMBER_OPTIONS_NAME = “ixxat adapter bus number”
const IxxatAdapterBusNumber adapterBusNumber = IxxatAdapterBusNumber ()
8.12 IxxatAdapterBusNumber
This struct holds the bus number for the Ixxat usb-to-can in the following public attributes:
const std::string const std::string const std::string const std::string
BUS_NUMBER_0_DEFAULT = “0” BUS_NUMBER_1 = “1” BUS_NUMBER_2 = “2” BUS_NUMBER_3 = “3”
8.13 Peak
This struct holds all information for the Peak usb-to-can in the following public attributes:
const std::string
ADAPTER_BUS_NUMBER_OPTIONS_NAME = “peak adapter bus number”
const PeakAdapterBusNumber adapterBusNumber = PeakAdapterBusNumber ()
8.14 PeakAdapterBusNumber
This struct holds the bus number for the Peak usb-to-can in the following public attributes:
const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string
BUS_NUMBER_1_DEFAULT = std::to_string (PCAN_USBBUS1) BUS_NUMBER_2 = std::to_string (PCAN_USBBUS2) BUS_NUMBER_3 = std::to_string (PCAN_USBBUS3) BUS_NUMBER_4 = std::to_string (PCAN_USBBUS4) BUS_NUMBER_5 = std::to_string (PCAN_USBBUS5) BUS_NUMBER_6 = std::to_string (PCAN_USBBUS6) BUS_NUMBER_7 = std::to_string (PCAN_USBBUS7) BUS_NUMBER_8 = std::to_string (PCAN_USBBUS8) BUS_NUMBER_9 = std::to_string (PCAN_USBBUS9) BUS_NUMBER_10 = std::to_string (PCAN_USBBUS10) BUS_NUMBER_11 = std::to_string (PCAN_USBBUS11) BUS_NUMBER_12 = std::to_string (PCAN_USBBUS12) BUS_NUMBER_13 = std::to_string (PCAN_USBBUS13) BUS_NUMBER_14 = std::to_string (PCAN_USBBUS14) BUS_NUMBER_15 = std::to_string (PCAN_USBBUS15) BUS_NUMBER_16 = std::to_string (PCAN_USBBUS16)
8.15 DeviceHandle
This class represents a handle for controlling a device on a bus and has the following public member functions.
DeviceHandle () DeviceHandle (uint32_t handle)
Version: doc 1.4.2 / NanoLib 1.3.0
32
8 Classes / functions reference
equals () Compares itself to a given device handle.
bool equals (DeviceHandle const other) const (uint32_t handle)
toString () Returns a string representation of the device handle.
std::string toString () const
get () Returns the device handle.
uint32_t get () const
8.16 DeviceId
Use this class (not immutable from creation on) to identify and distinguish devices on a bus:
Hardware adapter identifier
Device identifier
Description
The meaning of device ID / description values depends on the bus. For example, a CAN bus may use the integer ID.
DeviceId () [1/3] Constructs a new device ID object.
nlc::DeviceId::DeviceId (BusHardwareId const & busHardwareId_, unsigned int deviceId_, std::string const & description_)
Parameters busHardwareId_ deviceId_ description_
Identifier of the bus. An index; subject to bus (= CANopen node ID etc.). A description (may be empty); subject to bus.
DeviceId () [2/3]
Constructs a new device ID object with extended ID options.
nlc::DeviceId::DeviceId (BusHardwareId const & busHardwareId, unsigned int deviceId_, std::string const & description_ std::vector <uint8_t> const & extraId_, std::string const & extraStringId_)
Parameters busHardwareId_ deviceId_ description_ extraId_ extraStringId_
Identifier of the bus. An index; subject to bus (= CANopen node ID etc.). A description (may be empty); subject to bus. An additional ID (may be empty); meaning depends on bus. Additional string ID (may be empty); meaning depends on bus.
DeviceId () [3/3] Constructs a copy of a device ID object.
nlc::DeviceId::DeviceId (DeviceId const &)
Version: doc 1.4.2 / NanoLib 1.3.0
33
8 Classes / functions reference
Parameters deviceId_
Device ID to copy from.
equals () Compares new to existing objects.
bool nlc::DeviceId::equals (DeviceId const & other) const
Returns boolean
getBusHardwareId () Reads out the bus hardware ID.
BusHardwareId nlc::DeviceId::getBusHardwareId () const
Returns BusHardwareId
getDescription () Reads out the device description (maybe unused).
std::string nlc::DeviceId::getDescription () const
Returns string
getDeviceId () Reads out the device ID (maybe unused).
unsigned int nlc::DeviceId::getDeviceId () const
Returns unsigned int
toString () Returns the object as a string.
std::string nlc::DeviceId::toString () const
Returns string
getExtraId () Reads out the extra ID of the device (may be unused).
const std::vector <uint8_t>&getExtraId () const
Returns vector<uint8_t>
A vector of the additional extra ID’s (may be empty); meaning depends on the bus.
getExtraStringId () Reads out the extra string ID of the device (may be unused).
std::string getExtraStringId () const
Version: doc 1.4.2 / NanoLib 1.3.0
34
8 Classes / functions reference
Returns string
The additional string ID (may be empty); meaning depends on the bus.
8.17 LogLevelConverter
This class returns your log level as a string. static std::string toString (nlc::LogLevel logLevel)
8.18 LogModuleConverter
This class returns your library-specific log modulesetLoggingLevel () as a string.
static std::string
toString (nlc::LogModule logModule)
static std::string toString (nlc::LogModule logModule)
8.19 ObjectDictionary
This class represents an object dictionary of a controller and has the following public member functions: getDeviceHandle ()
virtual ResultDeviceHandle getDeviceHandle () const Returns ResultDeviceHandle
getObject () virtual ResultObjectSubEntry getObject (OdIndex const odIndex) Returns ResultObjectSubEntry
getObjectEntry () virtual ResultObjectEntry getObjectEntry (uint16_t index)
Returns ResultObjectEntry
Informs on an object’s properties.
getXmlFileName () virtual ResultString getXmlFileName () const
Returns ResultString
Returns the XML file name as a string.
readNumber () virtual ResultInt readNumber (OdIndex const odIndex) Returns ResultInt
readNumberArray () virtual ResultArrayInt readNumberArray (uint16_t const index)
Version: doc 1.4.2 / NanoLib 1.3.0
35
8 Classes / functions reference
Returns ResultArrayInt readString ()
virtual ResultString readString (OdIndex const odIndex) Returns ResultString readBytes () virtual ResultArrayByte readBytes (OdIndex const odIndex) Returns ResultArrayByte writeNumber () virtual ResultVoid writeNumber (OdIndex const odIndex, const int64_t value) Returns ResultVoid writeBytes () virtual ResultVoid writeBytes (OdIndex const OdIndex, std::vector <uint8_t>
const & data) Returns ResultVoid Related Links OdIndex
8.20 ObjectEntry
This class represents an object entry of the object dictionary, has the following static protected attribute and public member functions:
static nlc::ObjectSubEntry invalidObject
getName () Reads out the name of the object as a string.
virtual std::string getName () const
getPrivate () Checks if the object is private.
virtual bool getPrivate () const
getIndex () Reads out the address of the object index.
virtual uint16_t getIndex () const
Version: doc 1.4.2 / NanoLib 1.3.0
36
8 Classes / functions reference
getDataType () Reads out the data type of the object.
virtual nlc::ObjectEntryDataType getDataType () const
getObjectCode () Reads out the object code:
Null Deftype Defstruct Var Array Record
0x00 0x05 0x06 0x07 0x08 0x09
virtual nlc::ObjectCode getObjectCode () const
getObjectSaveable () Checks if the object is saveable and it’s category (see product manual for more details): APPLICATION, COMMUNICATION, DRIVE, MISC_CONFIG, MODBUS_RTU, NO, TUNING, CUSTOMER, ETHERNET, CANOPEN, VERIFY1020, UNKNOWN_SAVEABLE_TYPE
virtual nlc::ObjectSaveable getObjectSaveable () const
getMaxSubIndex () Reads out the number of subindices supported by this object.
virtual uint8_t getMaxSubIndex () const
getSubEntry () virtual nlc::ObjectSubEntry & getSubEntry (uint8_t subIndex)
See also ObjectSubEntry.
8.21 ObjectSubEntry
This class represents an object sub-entry (subindex) of the object dictionary and has the following public member functions:
getName () Reads out the name of the object as a string.
virtual std::string getName () const
getSubIndex () Reads out the address of the subindex.
virtual uint8_t getSubIndex () const
Version: doc 1.4.2 / NanoLib 1.3.0
37
8 Classes / functions reference
getDataType () Reads out the data type of the object.
virtual nlc::ObjectEntryDataType getDataType () const
getSdoAccess () Checks if the subindex is accessible via SDO:
ReadOnly
1
WriteOnly
2
ReadWrite
3
NoAccess
0
virtual nlc::ObjectSdoAccessAttribute getSdoAccess () const
getPdoAccess () Checks if the subindex is accessible/mappable via PDO:
Tx
1
Rx
2
TxRx
3
No
0
virtual nlc::ObjectPdoAccessAttribute getPdoAccess () const
getBitLength () Checks the subindex length.
virtual uint32_t getBitLength () const
getDefaultValueAsNumeric () Reads out the default value of the subindex for numeric data types.
virtual ResultInt getDefaultValueAsNumeric (std::string const & key) const
getDefaultValueAsString () Reads out the default value of the subindex for string data types.
virtual ResultString getDefaultValueAsString (std::string const & key) const
getDefaultValues () Reads out the default values of the subindex.
virtual std::map <std::string, std::string> getDefaultValues () const
Version: doc 1.4.2 / NanoLib 1.3.0
38
8 Classes / functions reference
readNumber () Reads out the numeric actual value of the subindex.
virtual ResultInt readNumber () const
readString () Reads out the string actual value of the subindex.
virtual ResultString readString () const
readBytes () Reads out the actual value of the subindex in bytes.
virtual ResultArrayByte readBytes () const
writeNumber () Writes a numeric value in the subindex.
virtual ResultVoid writeNumber (const int64_t value) const
writeBytes () Writes a value in the subindex in bytes.
virtual ResultVoid writeBytes (std::vector <uint8_t> const & data) const
8.22 OdIndex
Use this class (immutable from creation on) to wrap and locate object directory indices / sub-indices. A device’s OD has up to 65535 (0xFFFF) rows and 255 (0xFF) columns; with gaps between the discontinuous rows. See the CANopen standard and your product manual for more detail.
OdIndex () Constructs a new OdIndex object.
nlc::OdIndex::OdIndex (uint16_t index, uint8_t subIndex)
Parameters index subindex
From 0 to 65535 (0xFFFF) incl. From 0 to 255 (0xFF) incl.
getIndex () Reads out the index (from 0x0000 to 0xFFFF).
uint16_t nlc::OdIndex::getIndex () const
Returns uint16_t
getSubindex () Reads out the sub-index (from 0x00 to 0xFF)
uint8_t nlc::OdIndex::getSubIndex () const
Version: doc 1.4.2 / NanoLib 1.3.0
39
8 Classes / functions reference
Returns uint8_t
toString () Returns the index and subindex as a string. The string default 0xIIII:0xSS reads as follows:
I = index from 0x0000 to 0xFFFF
S = sub-index from 0x00 to 0xFF
std::string nlc::OdIndex::toString () const
Returns 0xIIII:0xSS
Default string representation
8.23 OdLibrary
Use this programming interface to create instances of the ObjectDictionary class from XML. By assignObjectDictionary, you can then bind each instance to a specific device due to a uniquely created identifier. ObjectDictionary instances thus created are stored in the OdLibrary object to be accessed by index. The ODLibrary class loads ObjectDictionary items from file or array, stores them, and has the following public member functions:
getObjectDictionaryCount () virtual uint32_t getObjectDictionaryCount () const
getObjectDictionary () virtual ResultObjectDictionary getObjectDictionary (uint32_t odIndex)
Returns ResultObjectDictionary
addObjectDictionaryFromFile ()
virtual ResultObjectDictionary addObjectDictionaryFromFile (std::string const & absoluteXmlFilePath)
Returns ResultObjectDictionary
addObjectDictionary ()
virtual ResultObjectDictionary addObjectDictionary (std::vector <uint8_t> const & odXmlData, const std::string &xmlFilePath = std::string ())
Returns ResultObjectDictionary
8.24 OdTypesHelper
In addition to the following public member functions, this class contains custom data types. Note: To check your custom data types, look for the enum class ObjectEntryDataType in od_types.hpp.
uintToObjectCode () Converts unsigned integers to object code:
Null Deftype
0x00 0x05
Version: doc 1.4.2 / NanoLib 1.3.0
40
8 Classes / functions reference
Defstruct Var Array Record
0x06 0x07 0x08 0x09
static ObjectCode uintToObjectCode (unsigned int objectCode)
isNumericDataType () Informs if a data type is numeric or not.
static bool isNumericDataType (ObjectEntryDataType dataType)
isDefstructIndex () Informs if an object is a definition structure index or not.
static bool isDefstructIndex (uint16_t typeNum)
isDeftypeIndex () Informs if an object is a definition type index or not.
static bool isDeftypeIndex (uint16_t typeNum)
isComplexDataType () Informs if a data type is complex or not.
static bool isComplexDataType (ObjectEntryDataType dataType)
uintToObjectEntryDataType () Converts unsigned integers to OD data type.
sstatic ObjectEntryDataType uintToObjectEntryDataType (uint16_t objectDataType)
objectEntryDataTypeToString () Converts OD data type to string.
static std::string objectEntryDataTypeToString (ObjectEntryDataType odDataType)
stringToObjectEntryDatatype () Converts string to OD data type if possible. Otherwise, returns UNKNOWN_DATATYPE.
static ObjectEntryDataType stringToObjectEntryDatatype (std::string dataTypeString)
Version: doc 1.4.2 / NanoLib 1.3.0
41
8 Classes / functions reference
objectEntryDataTypeBitLength () Informs on bit length of an object entry data type.
static uint32_t objectEntryDataTypeBitLength (ObjectEntryDataType const & dataType)
8.25 RESTfulBus struct
This struct contains the communication configuration options for the RESTful interface (over Ethernet). It contains the following public attributes:
const std::string const unsigned long const std::string const unsigned long const std::string const unsigned long
CONNECT_TIMEOUT_OPTION_NAME = “RESTful Connect Timeout” DEFAULT_CONNECT_TIMEOUT = 200 REQUEST_TIMEOUT_OPTION_NAME = “RESTful Request Timeout” DEFAULT_REQUEST_TIMEOUT = 200 RESPONSE_TIMEOUT_OPTION_NAME = “RESTful Response Timeout” DEFAULT_RESPONSE_TIMEOUT = 750
8.26 ProfinetDCP
Under Linux, the calling application needs CAP_NET_ADMIN and CAP_NET_RAW capabilities. To enable: sudo setcap ‘cap_net_admin,cap_net_raw+eip’ ./executable. In Windows, the ProfinetDCP interface uses WinPcap (tested with version 4.1.3) or Npcap (tested with versions 1.60 and 1.30). It thus searches the dynamically loaded wpcap.dll library in the following order (Note: no current Win10Pcap support):
1. Nanolib.dll directory 2. Windows system directory SystemRoot%System32 3. Npcap installation directory SystemRoot%System32Npcap 4. Environment path
This class represents a Profinet DCP interface and has the following public member functions:
getScanTimeout () Informs on a device scan timeout (default = 2000 ms).
virtual uint32_t nlc::ProfinetDCP::getScanTimeout () const
setScanTimeout () Sets a device scan timeout (default = 2000 ms).
virtual void nlc::setScanTimeout (uint32_t timeoutMsec)
getResponseTimeout () Informs on a device response timeout for setup, reset and blink operations (default = 1000 ms).
virtual uint32_t nlc::ProfinetDCP::getResponseTimeout () const
setResponseTimeout () Informs on a device response timeout for setup, reset and blink operations (default = 1000 ms).
virtual void nlc::ProfinetDCP::setResponseTimeout (uint32_t timeoutMsec)
Version: doc 1.4.2 / NanoLib 1.3.0
42
8 Classes / functions reference
isServiceAvailable ()
Use this function to check Profinet DCP service availability.
Network adapter validity / availability Windows: WinPcap / Npcap availability Linux: CAP_NET_ADMIN / CAP_NET_RAW capabilities
virtual ResultVoid nlc::ProfinetDCP::isServiceAvailable (const BusHardwareId & busHardwareId)
Parameters BusHardwareId Returns true
false
Hardware ID of Profinet DCP service to check. Service is available. Service is unavailable.
scanProfinetDevices () Use this function to scan the hardware bus for the presence of Profinet devices.
virtual ResultProfinetDevices scanProfinetDevices (const BusHardwareId & busHardwareId)
Parameters BusHardwareId Returns ResultProfinetDevices
Specifies each fieldbus to open. Hardware is open.
setupProfinetDevice () Establishes the following device settings:
Device name
IP address
Network mask
Default gateway
virtual ResultVoid nlc::setupProfinetDevice (const BusHardwareId & busHardwareId, const ProfinetDevice struct & profinetDevice, bool savePermanent)
resetProfinetDevice () Stops the device and resets it to factory defaults.
virtual ResultVoid nlc::resetProfinetDevice (const BusHardwareId & busHardwareId, const ProfinetDevice & profinetDevice)
blinkProfinetDevice () Commands the Profinet device to start blinking its Profinet LED.
virtual ResultVoid nlc::blinkProfinetDevice (const BusHardwareId & busHardwareId, const ProfinetDevice &profinetDevice)
validateProfinetDeviceIp () Use this function to check device’s IP address.
virtual ResultVoid validateProfinetDeviceIp (const BusHardwareId &busHardwareId, const ProfinetDevice & profinetDevice)
Parameters BusHardwareId ProfinetDevice
Specifies the hardware ID to check. Specifies the Profinet device to validate.
Version: doc 1.4.2 / NanoLib 1.3.0
43
8 Classes / functions reference
Returns ResultVoid
8.27 ProfinetDevice struct
The Profinet device data have the following public attributes:
std::string std::string std::array< uint8_t, 6 > uint32_t uint32_t uint32_t
deviceName deviceVendor macAddress ipAddress netMask defaultGateway
The MAC address is provided as array in format macAddress = {xx, xx, xx, xx, xx, xx}; whereas IP address, network mask and gateway are all interpreted as big endian hex numbers, such as:
IP address: 192.168.0.2 Network mask: 255.255.0.0 Gateway: 192.168.0.1
0xC0A80002 0xFFFF0000 0xC0A80001
8.28 Result classes
Use the “optional” return values of these classes to check if a function call had success or not, and also locate the fail reasons. On success, the hasError () function returns false. By getResult (), you can read out the result value as per type (ResultInt etc.). If a call fails, you read out the reason by getError ().
Protected attributes
string NlcErrorCode uint32_t
errorString errorCode exErrorCode
Also, this class has the following public member functions:
hasError () Reads out a function call’s success.
bool nlc::Result::hasError () const
Returns
true false
Failed call. Use getError () to read out the value. Sucessful call. Use getResult () to read out the value.
getError () Reads out the reason if a function call fails.
const std::string nlc::Result::getError () const
Returns const string
Version: doc 1.4.2 / NanoLib 1.3.0
44
8 Classes / functions reference
result () The following functions aid in defining the exact results:
Result (std::string const & errorString_)
Result (NlcErrorCode const & errCode, std::string const & errorString_)
Result (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
Result (Result const & result)
getErrorCode () Read the NlcErrorCode.
NlcErrorCode getErrorCode () const
getExErrorCode () uint32_t getExErrorCode () const
8.28.1 ResultVoid
NanoLib sends you an instance of this class if the function returns void. The class inherits the public functions and protected attributes from the result class and has the following public member functions:
ResultVoid () The following functions aid in defining the exact void result:
ResultVoid (std::string const &errorString_)
ResultVoid (NlcErrorCode const & errCode, std::string const & errorString_)
ResultVoid (NlcErrorCode const & errCode, const uint32_t exErrCode, std:: string const & errorString_)
ResultVoid (Result const & result)
8.28.2 ResultInt
NanoLib sends you an instance of this class if the function returns an integer. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Returns the integer result if a function call had success.
int64_t getResult () const
Returns int64_t
Version: doc 1.4.2 / NanoLib 1.3.0
45
8 Classes / functions reference
ResultInt () The following functions aid in defining the exact integer result:
ResultInt (int64_t result_)
ResultInt (std::string const & errorString_)
ResultInt (NlcErrorCode const & errCode, std::string const & errorString_)
ResultInt (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultInt (Result const & result)
8.28.3 ResultString
NanoLib sends you an instance of this class if the function returns a string. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the string result if a function call had success.
const std::string nlc::ResultString::getResult () const
Returns const string
ResultString () The following functions aid in defining the exact string result:
ResultString (std::string const & message, bool hasError_)
ResultString (NlcErrorCode const & errCode, std::string const & errorString_)
ResultString (NlcErrorCode const & errCode, const uint32_t exErrCode, std:: string const & errorString_)
ResultString (Result const & result)
8.28.4 ResultArrayByte
NanoLib sends you an instance of this class if the function returns a byte array. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the byte vector if a function call had success.
const std::vector <uint8_t> nlc::ResultArrayByte::getResult () const
Returns const vector<uint8_t>
Version: doc 1.4.2 / NanoLib 1.3.0
46
8 Classes / functions reference
ResultArrayByte () The following functions aid in defining the exact byte array result:
ResultArrayByte (std::vector <uint8_t> const & result_)
ResultArrayByte (std::string const & errorString_)
ResultArrayByte (NlcErrorCode const & errCode, std::string const & error String_)
ResultArrayByte (NlcErrorCode const & errCode, const uint32_t exErrCode, std:: string const & errorString_)
ResultArrayByte (Result const & result)
8.28.5 ResultArrayInt
NanoLib sends you an instance of this class if the function returns an integer array. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the integer vector if a function call had success.
const std::vector <int64_t> nlc::ResultArrayInt::getResult () const
Returns const vector<uint64_t>
ResultArrayInt () The following functions aid in defining the exact integer array result:
ResultArrayInt (std::vector <int64_t> const & result_)
ResultArrayInt (std::string const & errorString_)
ResultArrayInt (NlcErrorCode const & errCode, std::string const & error String_)
ResultArrayInt (NlcErrorCode const & errCode, const uint32_t exErrCode, std:: string const & errorString_)
ResultArrayInt (Result const & result)
8.28.6 ResultBusHwIds
NanoLib sends you an instance of this class if the function returns a bus hardware ID array. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the bus-hardware-ID vector if a function call had success.
const std::vector <BusHardwareId> nlc::ResultBusHwIds::getResult () const
Parameters const vector<BusHardwareId>
Version: doc 1.4.2 / NanoLib 1.3.0
47
8 Classes / functions reference
ResultBusHwIds () The following functions aid in defining the exact bus-hardware-ID-array result:
ResultBusHwIds (std::vector <BusHardwareId> const & result_)
ResultBusHwIds (std::string const & errorString_)
ResultBusHwIds (NlcErrorCode const & errCode, std::string const & errorString_)
ResultBusHwIds (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultBusHwIds (Result const & result)
8.28.7 ResultDeviceId
NanoLib sends you an instance of this class if the function returns a device ID. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the device ID vector if a function call had success.
DeviceId nlc::ResultDeviceId::getResult () const
Returns const vector<DeviceId>
ResultDeviceId () The following functions aid in defining the exact device ID result:
ResultDeviceId (DeviceId const & result_)
ResultDeviceId (std::string const & errorString_)
ResultDeviceId (NlcErrorCode const & errCode, std::string const & errorString_)
ResultDeviceId (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string errorString_)
ResultDeviceId (Result const & result)
8.28.8 ResultDeviceIds
NanoLib sends you an instance of this class if the function returns a device ID array. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Returns the device ID vector if a function call had success.
DeviceId nlc::ResultDeviceIds::getResult () const
Returns const vector<DeviceId>
Version: doc 1.4.2 / NanoLib 1.3.0
48
8 Classes / functions reference
ResultDeviceIds () The following functions aid in defining the exact device-ID-array result:
ResultDeviceIds (std::vector <DeviceId> const & result_)
ResultDeviceIds (std::string const & errorString_)
ResultDeviceIds (NlcErrorCode const & errCode, std::string const & errorString_)
ResultDeviceIds (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultDeviceIds (Result const & result)
8.28.9 ResultDeviceHandle
NanoLib sends you an instance of this class if the function returns the value of a device handle. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the device handle if a function call had success.
DeviceHandle nlc::ResultDeviceHandle::getResult () const
Returns DeviceHandle
ResultDeviceHandle () The following functions aid in defining the exact device handle result:
ResultDeviceHandle (DeviceHandle const & result_)
ResultDeviceHandle (std::string const & errorString_)
ResultDeviceHandle (NlcErrorCode const & errCode, std::string const & errorString_)
ResultDeviceHandle (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultDeviceHandle (Result const & result)
8.28.10 ResultObjectDictionary
NanoLib sends you an instance of this class if the function returns the content of an object dictionary. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the device ID vector if a function call had success.
const nlc::ObjectDictionary & nlc::ResultObjectDictionary::getResult () const
Version: doc 1.4.2 / NanoLib 1.3.0
49
8 Classes / functions reference
Returns
const vector<ObjectDictionary>
ResultObjectDictionary () The following functions aid in defining the exact object dictionary result:
ResultObjectDictionary (nlc::ObjectDictionary const & result_)
ResultObjectDictionary (std::string const & errorString_)
ResultObjectDictionary (NlcErrorCode const & errCode, std::string const & errorString_)
ResultObjectDictionary (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultObjectDictionary (Result const & result)
8.28.11 ResultConnectionState
NanoLib sends you an instance of this class if the function returns a device-connection-state info. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the device handle if a function call had success.
DeviceConnectionStateInfo nlc::ResultConnectionState::getResult () const
Returns DeviceConnectionStateInfo Connected / Disconnected / ConnectedBootloader
ResultConnectionState () The following functions aid in defining the exact connection state result:
ResultConnectionState (DeviceConnectionStateInfo const & result_)
ResultConnectionState (std::string const & errorString_)
ResultConnectionState (NlcErrorCode const & errCode, std::string const & errorString_)
ResultConnectionState (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultConnectionState (Result const & result)
8.28.12 ResultObjectEntry
NanoLib sends you an instance of this class if the function returns an object entry. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
Version: doc 1.4.2 / NanoLib 1.3.0
50
8 Classes / functions reference
getResult () Returns the device ID vector if a function call had success.
nlc::ObjectEntry const& nlc::ResultObjectEntry::getResult () const
Returns const ObjectEntry
ResultObjectEntry () The following functions aid in defining the exact object entry result:
ResultObjectEntry (nlc::ObjectEntry const & result_)
ResultObjectEntry (std::string const & errorString_)
ResultObjectEntry (NlcErrorCode const & errCode, std::string const & errorString_)
ResultObjectEntry (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultObjectEntry (Result const & result)
8.28.13 ResultObjectSubEntry
NanoLib sends you an instance of this class if the function returns an object sub-entry. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Returns the device ID vector if a function call had success.
nlc::ObjectSubEntry const & nlc::ResultObjectSubEntry::getResult () const
Returns const ObjectSubEntry
ResultObjectSubEntry () The following functions aid in defining the exact object sub-entry result:
ResultObjectSubEntry (nlc::ObjectEntry const & result_)
ResultObjectSubEntry (std::string const & errorString_)
ResultObjectSubEntry (NlcErrorCode const & errCode, std::string const & errorString_)
ResultObjectSubEntry (NlcErrorCode const & errCode, const uint32_t exErrCode, std::string const & errorString_)
ResultObjectSubEntry (Result const & result)
8.28.14 ResultProfinetDevices
NanoLib sends you an instance of this class if the function returns a Profinet device. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
Version: doc 1.4.2 / NanoLib 1.3.0
51
8 Classes / functions reference
getResult () Reads out the Profinet device vector if a function call had success.
const std::vector <ProfinetDevice> & getResult () const
ResultProfinetDevices () The following functions aid in defining the exact Profinet devices.
ResultProfinetDevices (const std::vector <ProfinetDevice> & profinetDevices)
ResultProfinetDevices (const Result & result)
ResultProfinetDevices (const std::string &errorText, NlcErrorCode errorCode = NlcErrorCode::GeneralError, uint32_t extendedErrorCode = 0)
8.28.15 ResultSampleDataArray
NanoLib sends you an instance of this class if the function returns a sample data array. The class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the data array if a function call had success.
const std::vector <SampleData> & getResult () const
ResultSampleDataArray () The following functions aid in defining the exact Profinet devices.
ResultSampleDataArray (const std::vector <SampleData> & dataArray)
ResultSampleDataArray (const std::string &errorDesc, const NlcErrorCode errorCode = NlcErrorCode::GeneralError, const uint32_t extendedErrorCode = 0)
ResultSampleDataArray (const ResultSampleDataArray & other)
ResultSampleDataArray (const Result & result)
8.28.16 ResultSamplerState
NanoLib sends you an instance of this class if the function returns a sampler state.This class inherits the public functions / protected attributes from the result class and has the following public member functions:
getResult () Reads out the sampler state vector if a function call had success.
SamplerState getResult () const
Returns SamplerState>
Unconfigured / Configured / Ready / Running / Completed / Failed / Cancelled
Version: doc 1.4.2 / NanoLib 1.3.0
52
8 Classes / functions reference
ResultSamplerState () The following functions aid in defining the exact sampler state.
ResultSamplerState (const SamplerState state)
ResultSamplerState (const std::string & errorDesc, const NlcErrorCode errorCode = NlcErrorCode::GeneralError, const uint32_t
extendedErrorCode = 0)
ResultSamplerState (const ResultSamplerState & other)
ResultSamplerState (const Result & result)
8.29 NlcErrorCode
If something goes wrong, the result classes report one of the error codes listed in this enumeration.
Error code Success GeneralError BusUnavailable CommunicationError ProtocolError
ODDoesNotExist ODInvalidAccess ODTypeMismatch OperationAborted OperationNotSupported InvalidOperation
InvalidArguments AccessDenied ResourceNotFound ResourceUnavailable OutOfMemory TimeOutError
C: Category D: Description R: Reason C: None. D: No error. R: The operation completed successfully.
C: Unspecified. D: Unspecified error. R: Failure that fits no other category.
C: Bus. D: Hardware bus not available. R: Bus inexistent, cut-off or defect.
C: Communication. D: Communication unreliable. R: Unexpected data, wrong CRC, frame or parity errors, etc.
C: Protocol. D: Protocol error. R: Response after unsupported protocol option, device report unsupported protocol, error in the protocol (say, SDO segment sync bit), etc. R: A response or device report to unsupported protocol (options) or to errors in protocol (say, SDO segment sync bit), etc. R: Unsupported protocol (options) or error in protocol (say, SDO segment sync bit), etc.
C: Object dictionary. D: OD address inexistent. R: No such address in the object dictionary.
C: Object dictionary. D: Access to OD address invalid. R: Attempt to write a read-only, or to read from a write-only, address.
C: Object dictionary. D: Type mismatch. R: Value unconverted to specified type, say, in an attempt to treat a string as a number.
C: Application. D: Process aborted. R: Process cut by application request. Returns only on operation interrupt by callback function, say, from bus-scanning.
C: Common. D: Process unsupported. R: No hardware bus / device support.
C: Common. D: Process incorrect in current context, or invalid with current argument. R: A reconnect attempt to already connected buses / devices. A disconnect attempt to already disconnected ones. A bootloader operation attempt in firmware mode or vice versa.
C: Common. D: Argument invalid. R: Wrong logic or syntax.
C: Common. D: Access is denied. R: Lack of rights or capabilities to perform the requested operation.
C: Common. D: Specified item not found. R: Hardware bus, protocol, device, OD address on device, or file was not found.
C: Common. D: Specified item not found. R: busy, inexistent, cut-off or defect.
C: Common. D: Insufficient memory. R: Too little memory to process this command.
C: Common. D: Process timed out. R: Return after time-out expired. Timeout may be a device response time, a time to gain shared or exclusive resource access, or a time to switch the bus / device to a suitable state.
Version: doc 1.4.2 / NanoLib 1.3.0
53
8 Classes / functions reference
8.30 NlcCallback
This parent class for callbacks has the following public member function: callback ()
virtual ResultVoid callback ()
Returns
ResultVoid
8.31 NlcDataTransferCallback
Use this callback class for data transfers (firmware update, NanoJ upload etc.). 1. For a firmware upload: Define a “co-class” extending this one with a custom callback method
implementation. 2. Use the “co-class’s” instances in NanoLibAccessor.uploadFirmware () calls. The main class itself has the following public member function:
callback () virtual ResultVoid callback (nlc::DataTransferInfo info, int32_t data)
Returns
ResultVoid
8.32 NlcScanBusCallback
Use this callback class for bus scanning. 1. Define a “co-class” extending this one with a custom callback method implementation. 2. Use the “co-class’s” instances in NanoLibAccessor.scanDevices () calls. The main class itself has the following public member function.
callback ()
virtual ResultVoid callback (nlc::BusScanInfo info, std::vector <DeviceId> const & devicesFound, int32_t data)
Returns ResultVoid
8.33 NlcLoggingCallback
Use this callback class for logging callbacks. 1. Define a class that extends this class with a custom callback method implementation 2. Use a pointer to its instances in order to set a callback by NanoLibAccessor >
setLoggingCallback (…).
virtual void callback (const std::string & payload_str, const std::string & formatted_str, const std::string & logger_name, const unsigned int log_level, const std::uint64_t time_since_epoch, const size_t thread_id)
8.34 SamplerInterface
Use this class to configure, start and stop the sampler, or to get sampled data and fetch a sampler’s status or last error. The class has the following public member functions.
Version: doc 1.4.2 / NanoLib 1.3.0
54
8 Classes / functions reference
configure () Configures a sampler.
virtual ResultVoid nlc::SamplerInterface::configure (const DeviceHandle deviceHandle, const SamplerConfiguration & samplerConfiguration)
Parameters [in] deviceHandle [in] samplerConfiguration
Returns ResultVoid
Specifies what device to configure the sampler for. Specifies the values of configuration attributes. Confirms that a void function has run.
getData () Gets the sampled data.
virtual ResultSampleDataArray nlc::SamplerInterface::getData (const DeviceHandle deviceHandle)
Parameters [in] deviceHandle Returns ResultSampleDataArray
Specifies what device to get the data for.
Delivers the sampled data, which can be an empty array if samplerNotify is active on start.
getLastError () Gets a sampler’s last error.
virtual ResultVoid nlc::SamplerInterface::getLastError (const DeviceHandle deviceHandle)
Returns ResultVoid
Confirms that a void function has run.
getState () Gets a sampler’s status.
virtual ResultSamplerState nlc::SamplerInterface::getState (const DeviceHandle deviceHandle)
Returns ResultSamplerState
Delivers the sampler state.
start () Starts a sampler.
virtual ResultVoid nlc::SamplerInterface::start (const DeviceHandle deviceHandle, SamplerNotify* samplerNotify, int64_t applicationData)
Parameters [in] deviceHandle [in] SamplerNotify [in] applicationData
Returns ResultVoid
Specifies what device to start the sampler for.
Specifies what optional info to report (can be nullptr).
Option: Forwards application-related data (a user-defined 8-bit array of value / device ID / index, or a datetime, a variable’s / function’s pointer, etc.) to samplerNotify.
Confirms that a void function has run.
Version: doc 1.4.2 / NanoLib 1.3.0
55
8 Classes / functions reference
stop () Stops a sampler.
virtual ResultVoid nlc::SamplerInterface::stop (const DeviceHandle deviceHandle)
Parameters [in] deviceHandle Returns ResultVoid
Specifies what device to stop the sampler for. Confirms that a void function has run.
8.35 SamplerConfiguration struct
This struct contains the data sampler’s configuration options (static or not).
Public attributes
std::vector <OdIndex> trackedAddresses
Up to 12 OD addresses to be sampled.
uint32_t
version
A structure’s version.
uint32_t
durationMilliseconds
Sampling duration in ms, from 1 to 65535
uint16_t
periodMilliseconds
Sampling period in ms.
uint16_t
numberOfSamples
Samples amount.
uint16_t
preTriggerNumberOfSamples
Samples pre-trigger amount.
bool
usingSoftwareImplementation
Use software implementation.
bool
usingNewFWSamplerImplementation Use FW implementation for devices with a
FW version v24xx or newer.
SamplerMode
mode
Normal, repetitive or continuous sampling.
SamplerTriggerCondition triggerCondition
Start trigger conditions: TC_FALSE = 0x00 TC_TRUE = 0x01 TC_SET = 0x10 TC_CLEAR = 0x11 TC_RISING_EDGE = 0x12 TC_FALLING_EDGE = 0x13 TC_BIT_TOGGLE = 0x14 TC_GREATER = 0x15 TC_GREATER_OR_EQUAL = 0x16 TC_LESS = 0x17 TC_LESS_OR_EQUAL = 0x18 TC_EQUAL = 0x19 TC_NOT_EQUAL = 0x1A TC_ONE_EDGE = 0x1B TC_MULTI_EDGE = 0x1C, OdIndex, triggerValue
SamplerTrigger
SamplerTrigger
A trigger to start a sampler?
Static public attributes
static constexpr size_t SAMPLER_CONFIGURATION_VERSION = 0x01000000 static constexpr size_t MAX_TRACKED_ADDRESSES = 12
8.36 SamplerNotify
Use this class to activate sampler notifications when you start a sampler. The class has the following public member function.
Version: doc 1.4.2 / NanoLib 1.3.0
56
8 Classes / functions reference
notify ()
Delivers a notification entry.
virtual void nlc::SamplerNotify::notify (const ResultVoid & lastError, const SamplerState samplerState, const std::vector <SampleData> & sampleDatas, int64_t applicationData)
Parameters [in] lastError [in] samplerState
[in] sampleDatas [in] applicationData
Reports the last error occurred while sampling. Reports the sampler status at notification time: Unconfigured / Configured / Ready / Running / Completed / Failed / Cancelled. Reports the sampled-data array. Reports application-specific data.
8.37 SampleData struct
This struct contains the sampled data.
uin64_t iterationNumber
Starts at 0 and only increases in repetitive mode.
std::vector<SampledValues> Contains he array of sampled values.
8.38 SampledValue struct
This struct contains the sampled values.
in64_t value uin64_t CollectTimeMsec
Contains the value of a tracked OD address.
Contains the collection time in milliseconds, relative to the sample beginning.
8.39 SamplerTrigger struct
This struct contains the trigger settings of the sampler.
SamplerTriggerCondition condition
OdIndex uin32_t value
The trigger condition:TC_FALSE = 0x00 TC_TRUE = 0x01 TC_SET = 0x10 TC_CLEAR = 0x11 TC_RISING_EDGE = 0x12 TC_FALLING_EDGE = 0x13 TC_BIT_TOGGLE = 0x14 TC_GREATER = 0x15 TC_GREATER_OR_EQUAL = 0x16 TC_LESS = 0x17 TC_LESS_OR_EQUAL = 0x18 TC_EQUAL = 0x19 TC_NOT_EQUAL = 0x1A TC_ONE_EDGE = 0x1B TC_MULTI_EDGE = 0x1C
The trigger’s OdIndex (address).
Condition value or bit number (starting from bit zero).
8.40 Serial struct
Find here your serial communication options and the following public attributes:
const std::string const SerialBaudRate
BAUD_RATE_OPTIONS_NAME = “serial baud rate” baudRate =SerialBaudRate struct
Version: doc 1.4.2 / NanoLib 1.3.0
57
8 Classes / functions reference
const std::string const SerialParity
PARITY_OPTIONS_NAME = “serial parity” parity = SerialParity struct
8.41 SerialBaudRate struct
Find here your serial communication baud rate and the following public attributes:
const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string const std::string
BAUD_RATE_7200 = “7200” BAUD_RATE_9600 = “9600” BAUD_RATE_14400 = “14400” BAUD_RATE_19200 = “19200” BAUD_RATE_38400 = “38400” BAUD_RATE_56000 = “56000” BAUD_RATE_57600 = “57600” BAUD_RATE_115200 = “115200” BAUD_RATE_128000 = “128000” BAUD_RATE_256000 = “256000”
8.42 SerialParity struct
Find here your serial parity options and the following public attributes:
const std::string const std::string const std::string const std::string const std::string
NONE = “none” ODD = “odd” EVEN = “even” MARK = “mark” SPACE = “space”
Version: doc 1.4.2 / NanoLib 1.3.0
58
9 Licenses
9 Licenses
NanoLib API interface headers and example source code are licensed by Nanotec Electronic GmbH & Co. KG under the Creative Commons Attribution 3.0 Unported License (CC BY). Library parts provided in binary format (core and fieldbus communication libraries) are licensed under the Creative Commons AttributionNoDerivatives 4.0 International License (CC BY ND).
Creative Commons
The following human-readable summary won’t substitute the license(s) itself. You can find the respective license at creativecommons.org and linked below. You are free to:
CC BY 3.0
Share: See right. Adapt: Remix, transform, and build upon the
material for any purpose, even commercially.
CC BY-ND 4.0
Share: Copy and redistribute the material in any medium or format.
The licensor cannot revoke the above freedoms as long as you obey the following license terms:
CC BY 3.0
CC BY-ND 4.0
Attribution: You must give appropriate credit, Attribution: See left. But: Provide a link to this
provide a link to the license, and indicate if
other license.
changes were made. You may do so in any
No derivatives: If you remix, transform, or build
reasonable manner, but not in any way that sug-
upon the material, you may not distribute the
gests the licensor endorses you or your use.
modified material.
No additional restrictions: You may not apply No additional restrictions: See left. legal terms or technological measures that legally
restrict others from doing anything the license
permits.
Note: You do not have to comply with the license for elements of the material in the public domain or where your use is permitted by an applicable exception or limitation.
Note: No warranties given. The license may not give you all of the permissions necessary for your intended use. For example, other rights such as publicity, privacy, or moral rights may limit how you use the material.
Version: doc 1.4.2 / NanoLib 1.3.0
59
Imprint, contact, versions
©2024 Nanotec Electronic GmbH & Co.KGKapellenstr.685622 FeldkirchenGermanyTel.+49(0) 89 900 686-0Fax+49(0)89 900 686-50 info@nanotec.dewww.nanotec.com All rights reserved. Error, omission, technical or content change possible without notice. Quoted brands/products are trademarks of their owners and to be treated as such. Original version.
Document 1.4.2 2024.12 1.4.1 2024.10 1.4.0 2024.09 1.3.3 2024.07
1.3.2 2024.05 1.3.1 2024.04 1.3.0 2024.02
1.2.2 2022.09 1.2.1 2022.08 1.2.0 2022.08
+ Added > Changed # Fixed > Re-work of the provided examples.
+ NanoLib Modbus: Added device locking mechanism for Modbus VCP. # NanoLib Core: Fixed connection state check. # NanoLib Code: Corrected bus hardware reference removal.
+ NanoLib-CANopen: Support for Peak PCAN-USB adapter (IPEH-002021/002022).
> NanoLib Core: Changed logging callback interface (LogLevel replaced by LogModule). # NanoLib Logger: Separation between core and modules has been corrected. # Modbus TCP: Fixed firmware update for FW4. # EtherCAT: Fixed NanoJ program upload for Core5. # EtherCAT: Fixed firmware update for Core5.
# Modbus RTU: Fixed timing issues with low baud rates during firmware update. # RESTful: Fixed NanoJ program upload.
# NanoLib Modules Sampler: Correct reading of sampled boolean values.
+ Java 11 support for all platforms. + Python 3.11/3.12 support for all platforms. + New logging callback interface (see examples). + Callback sinks for NanoLib Logger. > Update logger to version 1.12.0. > NanoLib Modules Sampler: Support now for Nanotec controller firmware v24xx. > NanoLib Modules Sampler: Change in structure used for sampler configuration. > NanoLib Modules Sampler: Continuous mode is synonymous with endless; the trigger condition is checked once; the number of samples must be 0. > NanoLib Modules Sampler: Normal priority for the thread that collects data in firmware mode. > NanoLib Modules Sampler: Rewritten algorithm to detect transition between Ready & Running state. # NanoLib Core: No more Access Violation (0xC0000005) on closing 2 or more devices using the same bus hardware. # NanoLib Core: No more Segmentation Fault on attaching a PEAK adapter under Linux. # NanoLib Modules Sampler: Correct sampled-values reading in firmware mode. # NanoLib Modules Sampler: Correct configuration of 502X:04. # NanoLib Modules Sampler: Correct mixing of buffers with channels. # NanoLib-Canopen: Increased CAN timeouts for robustness and correct scanning at lower baudrates. # NanoLib-Modbus: VCP detection algorithm for special devices (USB-DA-IO).
+ EtherCAT support.
+ Note on VS project settings in Configure your project.
+ getDeviceHardwareGroup (). + getProfinetDCP (isServiceAvailable). + getProfinetDCP (validateProfinetDeviceIp). + autoAssignObjectDictionary (). + getXmlFileName (). + const std::string & xmlFilePath in addObjectDictionary (). + getSamplerInterface ().
Product 1.3.0 1.2.1 1.2.0 1.1.3
1.1.2 1.1.1 1.1.0
1.0.1 (B349) 1.0.0 (B344) 1.0.0 (B341)
Version: doc 1.4.2 / NanoLib 1.3.0
60
10 Imprint, contact, versions
Document
1.1.2 2022.03 1.1.1 2021.11 1.1.0 2021.06 1.0.1 2021.06 1.0.0 2021.05
+ Added > Changed # Fixed + rebootDevice (). + Error code ResourceUnavailable for getDeviceBootloaderVersion (), ~VendorId (), ~HardwareVersion (), ~SerialNumber, and ~Uid. > firmwareUploadFromFile now uploadFirmwareFromFile (). > firmwareUpload () now uploadFirmware (). > bootloaderUploadFromFile () now uploadBootloaderFromFile (). > bootloaderUpload () now uploadBootloader (). > bootloaderFirmwareUploadFromFile () to uploadBootloaderFirmwareFromFile (). > bootloaderFirmwareUpload () now uploadBootloaderFirmware (). > nanojUploadFromFile () now uploadNanoJFromFile (). > nanojUpload () now uploadNanoJ (). > objectDictionaryLibrary () now getObjectDictionaryLibrary (). > String_String_Map now StringStringMap. > NanoLib-Common: faster execution of listAvailableBusHardware and openBusHardwareWithProtocol with Ixxat adapter. > NanoLib-CANopen: default settings used (1000k baudrate, Ixxat bus number 0) if bus hardware options empty. > NanoLib-RESTful: admin permission obsolete for communication with Ethernet bootloaders under Windows if npcap / winpcap driver is available. # NanoLib-CANopen: bus hardware now opens crashless with empty options. # NanoLib-Common: openBusHardwareWithProtocol () with no memory leak now.
+ Linux ARM64 support. + USB mass storage / REST / Profinet DCP support. + checkConnectionState (). + getDeviceBootloaderVersion (). + ResultProfinetDevices. + NlcErrorCode (replaced NanotecExceptions). + NanoLib Modbus: VCP / USB hub unified to USB. > Modbus TCP scanning returns results. < Modbus TCP communication latency remains constant.
+ More ObjectEntryDataType (complex and profile-specific). + IOError return if connectDevice () and scanDevices () find none. + Only 100 ms nominal timeout for CanOpen / Modbus.
+ Modbus support (plus USB Hub via VCP). + Chapter Creating your own Linux project. + extraHardwareSpecifier to BusHardwareId (). + extraId_ and extraStringId_ to DeviceId ().
+ setBusState (). + getDeviceBootloaderBuildId (). + getDeviceFirmwareBuildId (). + getDeviceHardwareVersion (). # Bugfixes.
Edition.
Product
0.8.0 0.7.1 0.7.0 0.5.1 0.5.1
Version: doc 1.4.2 / NanoLib 1.3.0
61
Documents / Resources
 |
Nanotic NanoLib C++ Programming [pdf] User Manual NanoLib C Programming, C Programming, Programming |