Freetech FVR40 High-Performance Automobile 4D Image Radar User Manual

Overview
FVR40 is a low-cost, high-performance automobile 4D image radar, which uses unique wave forming design and creative perception algorithm, being capable of detecting four dimensions including Elevation. It is capable of transferring 30, 000 points per second, and has high azimuth and elevation angle accuracy, low false alarm and missing alarm. It has good anti-interference performance. FVR40 radar is equipped with CAN-FD and 100BASE-T1 Ethernet communication, supporting transferring huge amounts of data, and transfer point cloud and objects data in real time manner.
Perception Performance
FVR40 radar can detect objects with RCS between -10 ~ +40 dBsm.
FOV
FVR40 FOV is shown as the picture below.

FT will provide radar mechanical 3D data along with accurate radar FOV cone. If FOV cone is interfered while installing radar on vehicle, Freetech’s review and agreement shall be needed.
1.1 Performance Index
FVR40 is working in 77.5 – 78.5 GHz frequency band, with 1 GHz bandwidth. The detection performance parameters are as below:
| parameter | Index | |
|
Range |
Max distance | 320m |
| Accuracy | 0.1m | |
| Resolution | 0.2m | |
| Velocity | Relative velocity | -110~70 m/s |
| Accuracy | 0.1 m/s | |
| Resolution | 0.2 m/s | |
|
Azimuth |
水平 FOV Azimuth FOV |
-60°~60° |
| Accuracy | 0.5° | |
| Resolution | 1.0° | |
|
Elevation |
FOV Elevation FOV |
-15°~15° |
| Accuracy | 0.5° | |
| Resolution | 1.0° | |
| Point cloud transferring rate | 30000 points/second | |
| Point cloud quantity (points quantity/cycle time) |
1000~2000 |
|
| Cycle Time | 66 ms | |
Radar Function
FVR40 will output radar perception signals, and outputs detection raw data and objection signals simultaneously. These perception signals can be sent to camera or domain controller to realize related ADAS function.
FVR40 provides attributes for point cloud as below:
| Type | Attribute |
|
General information |
Frame ID |
| Time stamp | |
| Latency | |
| Range | Range |
| Velocity | Velocity |
|
Azimuth & Elevation |
Azimuth |
| Elevation | |
| SNR | SNR |
FVR40 provides attributes for object as below:
| Type | Attribute |
|
General information |
Object ID |
| Track Status | |
| Validity | |
| Magnitude | |
| Alive counter | |
| CRC | |
|
Range |
Longitudinal position |
| Standard deviation longitudinal position | |
| Lateral position | |
| Standard deviation lateral position | |
|
Velocity |
Longitudinal velocity |
| Standard deviation longitudinal velocity | |
| Lateral velocity | |
| Standard deviation lateral velocity | |
| Longitudinal acceleration | |
| Lateral acceleration | |
|
Height |
Vertical position |
| Standard deviation vertical position | |
|
Classification |
Motion classification of the object |
| Stationary count | |
|
Objects information |
Heading angle |
| Object extension – box length | |
| Object extension – box width |
Hardware Solution
Structure
FVR40 satisfied IP69K water and dust protection level. Weight is about 300g. Dimensions are shown as the figures below (Unit: mm).

Interface
FVR40 radar interface uses 12-pin connector, shown as below:
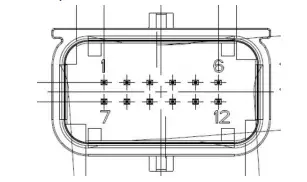
Detailed pin definition for radar connector is as below:
| PIN No. | PIN definition | Function Description | Remark |
| 1 | BATT | KL30 | |
| 2 | VCAN_H | COM1 | Support specific
frame wakeup. |
| 3 | MP2
(Reserved) |
Position ID2 | Multipurpose Pin2 |
| 4 | PCAN_H
(Reserved) |
CAN | |
| 5 | 空 | ||
| 6 | ETH_TRX_M | Ethernet | |
| 7 | MP1 | Position ID1 | Multipurpose Pin1 |
| 8 | VCAN_L | CAN | |
| 9 | GND | Ground | |
| 10 | PCAN_L
(Reserved) |
CAN | |
| 11 | 空 | ||
| 12 | ETH_TRX_P | Ethernet |
Antenna
FVR40 uses micro-strip array antenna, with 6 transmitting channels and 8 receiving channels.
Virtual Aperture Imagine (VAI)
FVR40 uses virtual aperture imaging (VAI) technology, which can significantly increase virtual antenna quantity. The specific implementation principle is shown as below picture. Via unique waveform design, every carrier can change their frequency modulation, phase modulation and amplitude modulation adaptively, to make every reception antenna generate different phases at different time, to get ‘virtual antenna aperture’.
|
FVR40 Radar Product Specification |
Version: V2.6
Publish date: 2022/12/22 Page: 8 /11 |

Signal Processing Procedure
FVR40 signal processing procedure is shown as below. NCI means Non-Coherent Integration, and VAI means Virtual Aperture Imaging.

Working Manner
Power Dissipation
Under 12V voltage, FVR40 radar current and power dissipation is shown in the table below:
| Sleep | Normal | Maximum | |
| Current | <100uA | 410mA | 620 mA |
| Power | – | 5W | <7W |
Working state under different voltages
Under different voltages, FVR40 radar working states are shown in the table below:
|
FVR40 Radar Product Specification |
No: Version: V2.6
Publish date: 2022/12/22 Page: 9 /11 |
|
Voltage |
Communication state | Hardware monitor | Over-voltage protection |
|
<6.5V |
Unable to communicate | Unable to monitor | Inactive |
|
6.5V~9V |
Normal | Normal (DTC
‘undervoltage’being stored) |
Inactive |
| 9V~16V | Normal | Normal | Inactive |
|
16V~32V |
Normal | Normal (DTC ‘overvoltage’ being stored) | Inactive |
|
>32V |
Unable to communicate | Unable to monitor | Active |
Wake up
FVR40 radar support two kinds of wake up: Network CAN frame wake up, and Reserved KL15 wake up.
Environment parameters
FVR40 radar related environment parameters are as below:
- Storage temperature: -40℃ ~ 105℃
- Operating temperature: -40℃ ~ 85℃
- Function limited operating temperature: 85℃ ~ 95℃
Radar Alignment
FVR40 radar can support three methods for azimuth and elevation alignment: static alignment, dynamic alignment and self-alignment.
- Static alignment uses specific alignment equipment during vehicle
- Dynamic alignment is usually used for vehicle EOL, or after-sale repair provide by 4S Alignment angle can be calculated after driving on a specific road.
- Self-alignment is occurring during normal When the road condition and driving condition are satisfied, the alignment is performing automatically.
|
FVR40 Radar Product Specification |
No: Version: V2.6
Publish date: 2022/12/22 Page: 10 /11 |
Mounting Guideline
FVR40 radar uses bracket to fix on the vehicle body, as the below pictures shown:
Functional Safety
FVR40 can meet functional safety ASIL-B system requirements.
Caution notice of certification
Please take attention that changes or modification not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment.
This device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:
- This device may not cause harmful interference, and
- This device must accept any interference received, including interference that may cause undesired
This device contains licence-exempt transmitter(s)/receiver(s) that comply with Innovation, Science and Economic Development Canada’s licence-exempt RSS(s). Operation is subject to the following two conditions:
- This device may not cause
- This device must accept any interference, including interference that may cause undesired operation of the
Read More About This Manual & Download PDF:
Documents / Resources
 |
Freetech FVR40 High-Performance Automobile 4D Image Radar [pdf] User Manual 04060203, 2BB3404060203, FVR40, High-Performance Automobile 4D Image Radar, FVR40 High-Performance Automobile 4D Image Radar, Automobile 4D Image Radar, 4D Image Radar, Image Radar, Radar |