EXCELITAS TECHNOLOGIES pco.convert 현미경 카메라

명세서
- 제품명: pco. convert
- 버전: 1.52.0
- 라이센스: 크리에이티브 커먼즈 저작자표시-변경금지 4.0 국제 라이센스
- 제조업체: Excelitas PCO GmbH
- 주소: Donaupark 11, 93309 Kelheim, Germany
- 연락처: +49 (0) 9441 2005 50
- 이메일: pco@excelitas.com
- Web대지: www.excelitas.com/product-category/pco
제품 사용 지침
일반 정보
pco.convert는 색상 및 의사 색상 변환을 위한 다양한 기능을 제공합니다. 최적의 성능을 위해 사용 설명서에 제공된 지침을 따르는 것이 중요합니다.
API 함수 설명 변환
Convert API는 색상 및 이미지 데이터를 조작하기 위한 함수 세트를 제공합니다. 다음은 몇 가지 주요 함수입니다.
-
- PCO_변환생성: 새로운 변환 인스턴스를 만듭니다.
- PCO_변환삭제: 변환 인스턴스를 삭제합니다.
- PCO_변환받기: 변환 설정을 받으세요.
색상 및 가상 색상 변환
pco.convert는 흑백 변환과 컬러 변환을 모두 지원합니다. 각 변환 유형에 대해 매뉴얼에 제공된 구체적인 지침을 따르세요.
자주 묻는 질문
- 질문: pco.convert를 사용하여 색상 변환을 수행하려면 어떻게 해야 하나요?
- 답변: 색상 변환을 수행하려면 사용자 매뉴얼에 설명된 대로 적절한 매개변수와 함께 PCO_ConvertGet 함수를 사용하세요.
- 질문: 변환 인스턴스를 삭제할 수 있나요?
- 답변: 네, PCO_ConvertDelete 함수를 사용하여 변환 인스턴스를 삭제할 수 있습니다.
사용자 설명서
pco.convert
Excelitas PCO GmbH는 이 문서의 지침을 주의 깊게 읽고 따르기를 요청합니다. 질문이나 의견이 있으시면 언제든지 저희에게 연락해 주시기 바랍니다.
- 전화: + 49 (0) 9441 2005 50
- 팩스: + 49 (0) 9441 2005 20
- 우편 주소: Excelitas PCO GmbH Donaupark 11 93309 켈하임, 독일
- 이메일: pco@excelitas.com
- web: www.excelitas.com/product-category/pco
pco.convert
사용자 설명서 1.52.0
2024년 XNUMX월 출시
©저작권 Excelitas PCO GmbH

이 저작물은 Creative Commons Attribution-NoDerivatives 4.0 International License에 따라 사용이 허가되었습니다. 에게 view 이 라이센스의 사본은 다음을 방문하십시오. http://creativecommons.org/licenses/by-nd/4.0/ 또는 Creative Commons, PO Box 1866, Mountain으로 편지를 보내십시오. View, CA 94042, 미국.
일반적인
- 이 변환 SDK 설명은 PCO 카메라를 제어하는 데 사용되는 독점 애플리케이션에서 PCO 변환 루틴을 구현하는 데 사용할 수 있습니다. 타사 카메라에서 변환 루틴을 사용하는 것은 금지되어 있습니다.
- 그만큼 pco.convert sdk는 두 부분으로 구성됩니다. LUT 변환 기능 pco.conv.dll 그리고 대화 기능 pco_cdlg.dll .
변환 함수는 픽셀당 8비트 이상의 해상도를 가진 데이터 영역(흑백 및 컬러)을 픽셀당 8비트 해상도의 흑백 데이터 영역 또는 픽셀당 24(32)비트 해상도의 컬러 데이터 영역으로 변환하는 데 사용됩니다. DLL에는 다양한 변환 객체를 만들고 채우는 함수도 포함되어 있습니다. - API의 두 번째 부분에는 대화 상자 기능이 포함되어 있습니다. 대화 상자는 사용자가 변환 객체의 매개변수를 설정할 수 있는 간단한 GUI 대화 상자입니다. 대화 상자 기능은 다음에 포함됩니다. pco_cdlg.dll pco.conv.dll의 일부 기능을 기반으로 합니다.
- 에서 pco.sdk PCO 카메라에는 두 가지가 있습니다.ampconvert sdk를 사용하는 les입니다. 하나는 Test_cvDlg s입니다.ample이고 다른 하나는 sc2_demo입니다. 그 s를 살펴보세요.ampconvert sdk 함수가 실제로 어떻게 동작하는지 보려면 les를 사용합니다.
흑백 및 가상 색상 변환
b/w 함수에서 사용되는 변환 알고리즘은 다음과 같은 간단한 루틴을 기반으로 합니다.
![]()
어디
- pos는 카운터 변수입니다
- dataout은 출력 데이터 영역입니다
- datain은 입력 데이터 영역입니다
- lutbw는 LUT를 포함하는 2n 크기의 데이터 영역입니다. 여기서 n은 픽셀당 비트 수로 표현된 입력 영역의 해상도입니다.
의사색상 함수에서 RGB 데이터 영역으로 변환하는 기본 루틴은 다음과 같습니다.

어디
- pos는 입력 카운터 변수입니다
- pout은 출력 카운터 변수입니다
- dataout은 출력 데이터 영역입니다
- datain은 입력 데이터 영역입니다
- lutbw는 LUT를 포함하는 2n 크기의 데이터 영역입니다. 여기서 n은 픽셀당 비트 수로 표현된 입력 영역의 해상도입니다.
- lutred, lutgreen, lutblue는 LUT를 포함하는 크기가 2n인 데이터 영역입니다. 여기서 n은 픽셀당 비트 단위로 나타낸 출력 영역의 해상도입니다.
색상 변환
- PCO 컬러 카메라에 사용되는 CCD 컬러 센서에는 빨간색, 초록색, 파란색 필터가 있습니다. 각 픽셀에는 한 가지 유형의 필터가 있으므로 원래는 각 픽셀에 대한 전체 색상 정보를 얻을 수 없습니다. 오히려 각 픽셀은 필터를 통과하는 색상에 대해 12비트의 동적 범위를 가진 값을 제공합니다.
- PCO의 모든 컬러 카메라는 Bayer-filter DE 모자이크로 작동합니다. 이러한 컬러 이미지 센서의 컬러 필터 패턴은 2×2 매트릭스로 축소될 수 있습니다. 이미지 센서 자체는 이러한 2×2 매트릭스의 매트릭스로 볼 수 있습니다.
- 이 색상 패턴을 가정해 보자
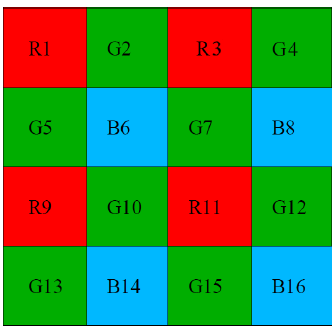
색상 자체는 행렬의 해석일 뿐입니다. 이 해석은 소위 디모자이킹 알고리즘에 의해 수행됩니다. pco_conv.dll은 특별한 독점적 방법으로 작동합니다.
API 함수 설명 변환
PCO_변환생성
설명
PCO_SensorInfo 구조를 기반으로 새로운 변환 객체를 만듭니다. 생성된 변환 핸들은 변환 중에 사용됩니다. 애플리케이션이 종료되고 변환 dll을 언로드하기 전에 PCO_ConvertDelete를 호출하세요.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들* | 생성된 변환 객체를 수신할 핸들에 대한 포인터 |
| str센서 | PCO_센서정보* | 센서 정보 구조에 대한 포인터입니다. wSize 매개변수를 설정하는 것을 잊지 마세요. |
| 아이컨버트타입 | 정수 | 변환 유형을 흑백, 컬러, 의사 컬러 또는 컬러 16으로 결정하는 변수 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환삭제
설명
이전에 생성된 변환 객체를 삭제합니다. 애플리케이션을 닫기 전에 이 함수를 호출하는 것이 필수입니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 오류 코드. |
PCO_변환받기
설명
이전에 생성된 변환 객체의 모든 값을 가져옵니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr변환 | PCO_변환* | pco 변환 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 오류 코드. |
PCO_변환 세트
설명
이전에 생성된 변환 객체에 필요한 값을 설정합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr변환 | PCO_변환* | pco 변환 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환Get디스플레이
설명
PCO_Display 구조를 가져옵니다
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr디스플레이 | PCO_디스플레이* | pco 디스플레이 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr디스플레이 | PCO_디스플레이* | pco 디스플레이 구조에 대한 포인터 |
PCO_변환설정디스플레이
설명
PCO_Display 구조를 설정합니다
원기
 매개변수
매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr디스플레이 | PCO_디스플레이* | pco 디스플레이 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환세트베이어
설명
이전에 생성된 변환 객체의 Bayer 구조 값을 설정합니다. 이 함수를 사용하여 Bayer 패턴 매개변수를 변경합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr바이어 | PCO_바이엘* | PCO Bayer 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환설정필터
설명
이전에 생성된 변환 객체의 필터 구조 값을 설정합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 프리 필터 | PCO_필터* | pco 필터 구조에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환설정센서정보
설명
이전에 생성된 변환 개체에 대한 PCO_SensorInfo 구조를 설정합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| pstr센서정보 | PCO_센서정보* | 센서 정보 구조에 대한 포인터입니다. wSize 매개변수를 설정하는 것을 잊지 마세요. |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_SetPseudoLut
설명
플롯의 3개의 가상 색상표를 로드합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 가짜_루트 | 부호없는 문자 * | 가상 lut 색상 값에 대한 포인터(R, G, B 색상: 256 * 3바이트 또는 4바이트) |
| 이넘컬러스 | 정수 | R, G, B의 경우 3으로, R, G, B, A의 경우 4로 설정 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_LoadPseudoLut
설명
변환 객체에 가상 색상 조회 테이블을 로드합니다. 이 함수는 미리 정의되거나 자체 생성된 가상 조회 테이블 중 일부를 로드하는 데 사용할 수 있습니다.
원기

매개변수
| 이름 유형 설명 | ||||||
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 | ||||
| 체재 | 정수 | 0 | lt1, 1 | lt2, 2 | lt3, 3 | 리티4 |
| file이름 | 숯* | 의 이름 file 로드하다 | ||||
반환값
| 이름 유형 설명 | ||||||
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 | ||||
| 체재 | 정수 | 0 | lt1, 1 | lt2, 2 | lt3, 3 | 리티4 |
| file이름 | 숯* | 의 이름 file 로드하다 | ||||
PCO_컨버팅16TO8
설명
b16의 그림 데이터를 b8(회색조)의 8비트 데이터로 변환합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 방법 | 정수 | 모드 매개변수 |
| 아이콜모드 | 정수 | 색상 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| b16 | 단어* | 원시 이미지에 대한 포인터 |
| b8 | 바이트* | 변환된 8비트 흑백 이미지에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_컨버팅16TO24
설명
b16의 그림 데이터를 b24(회색조)의 24비트 데이터로 변환합니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 방법 | 정수 | 모드 매개변수 |
| 이름 | 유형 | 설명 |
| 아이콜모드 | 정수 | 색상 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| b16 | 단어* | 원시 이미지에 대한 포인터 |
| b24 | 바이트* | 변환된 24비트 컬러 이미지에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_Convert16TOCOL
설명
b16의 그림 데이터를 b8(컬러)의 RGB 데이터로 변환
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 방법 | 정수 | 모드 매개변수 |
| 아이콜모드 | 정수 | 색상 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| b16 | 단어* | 원시 이미지에 대한 포인터 |
| b8 | 바이트* | 변환된 24비트 컬러 이미지에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_Convert16TOPSEUDO
설명
b16의 그림 데이터를 b8(색상)의 의사색상 데이터로 변환
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 방법 | 정수 | 모드 매개변수 |
| 아이콜모드 | 정수 | 색상 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| b16 | 단어* | 원시 이미지에 대한 포인터 |
| b8 | 바이트* | 변환된 24비트 의사색상 이미지에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_변환16TOCOL16
설명
b16의 그림 데이터를 b16(컬러)의 RGB 데이터로 변환
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 방법 | 정수 | 모드 매개변수 |
| 이름 | 유형 | 설명 |
| 아이콜모드 | 정수 | 색상 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| 비16인 | 단어* | 원시 이미지에 대한 포인터 |
| 비16아웃 | 단어* | 변환된 48비트 컬러 이미지에 대한 포인터 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_GetWhiteBalance
설명
color_temp 및 tint에 대한 화이트 밸런스 값을 가져옵니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| ph | 핸들 | 이전에 생성된 변환 개체에 대한 핸들 |
| 색상 온도 | 정수* | 계산된 색온도를 얻기 위한 int 포인터 |
| 색조 | 정수* | 계산된 색조 값을 얻기 위한 int 포인터 |
| 방법 | 정수 | 모드 매개변수 |
| 너비 | 정수 | 변환할 이미지의 너비 |
| 키 | 정수 | 변환할 이미지의 높이 |
| gb12 | 단어* | 원시 그림 데이터 배열에 대한 포인터 |
| x_분 | 정수 | 계산에 사용할 이미지 영역을 설정하는 사각형 |
| y_분 | 정수 | 계산에 사용할 이미지 영역을 설정하는 사각형 |
| 최대 x_ | 정수 | 계산에 사용할 이미지 영역을 설정하는 사각형 |
| y_최대 | 정수 | 계산에 사용할 이미지 영역을 설정하는 사각형 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_GetMaxLimit
설명
GetMaxLimit은 주어진 온도와 색조에 대한 RGB 값을 가져옵니다. 변환 제어 대화 상자 내의 최대값은 RGB 값의 가장 큰 값을 초과해서는 안 됩니다. 예를 들어 R이 가장 큰 값인 경우 최대값은 R 값이 비트 해상도(4095)에 도달할 때까지 증가할 수 있습니다. 최대값을 감소시키는 경우에도 동일한 조건이 충족되어야 합니다. 예를 들어 B가 가장 낮은 값인 경우 최대값은 B 값이 최소값에 도달할 때까지 감소할 수 있습니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| r_최대 | 흙손* | 최대 빨간색 값을 수신하는 float에 대한 포인터 |
| 최대 g_max | 흙손* | 최대 녹색 값을 수신하는 float에 대한 포인터 |
| 최대값 | 흙손* | 최대 파란색 값을 수신하는 float에 대한 포인터 |
| 온도 | 뜨다 | 색온도 |
| 색조 | 뜨다 | 틴트 설정 |
| 출력 비트 | 정수 | 변환된 이미지의 비트 해상도(일반적으로 8) |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_GetColorValues
설명
주어진 R, G, B 최대값에 대한 색온도와 색조를 가져옵니다.
GetColorValues는 다음에서만 사용됩니다. pco.캠웨어 . 이전 색상 lut의 Rmax, Gmax, Bmax 값을 기반으로 색온도와 색조를 계산합니다. 계산된 값은 새 변환 루틴으로 이전 b16 및 tif16 이미지를 변환하는 데 사용됩니다.
원기

매개변수
| 이름 | 유형 | 설명 |
| pf색온도 | 흙손* | 색온도를 수신하기 위한 float에 대한 포인터 |
| pf색온도 | 흙손* | 색상 색조를 수신하기 위한 float에 대한 포인터 |
| 아이레드맥스 | 정수 | 빨간색의 현재 최대값을 설정하는 정수 |
| 아이그린맥스 | 정수 | 녹색의 현재 최대값을 설정하는 정수입니다. |
| 아이블루맥스 | 정수 | 파란색의 현재 최대값을 설정하는 정수 |
반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_화이트 밸런스 디스플레이 구조
설명
화이트 밸런스를 계산하고 제한을 유지하면서 strDisplaystruct에 값을 설정합니다. convert Handle에서 내부적으로 struct str Display를 가져옵니다.
원기

매개변수

반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
PCO_GetVersionInfoPCO_CONV
설명
dll의 버전 정보를 반환합니다.
원기


매개변수

반환값
| 이름 | 유형 | 설명 |
| 오류 메시지 | 정수 | 성공 시 0, 그렇지 않으면 Errorcode를 반환합니다. |
일반적인 구현
이 일반적인 단계별 구현은 기본적인 처리를 보여줍니다.
- 선언

- 모든 버퍼 '크기' 매개변수를 예상 값으로 설정합니다.

- 센서 정보 매개변수를 설정하고 변환 객체를 생성합니다.

- 선택적으로 변환 대화 상자를 엽니다.

- 원하는 범위로 최소값과 최대값을 설정하고 변환 객체로 설정합니다.

- 대화 상자가 열려 있으면 변환을 수행하고 대화 상자에 데이터를 설정합니다.

- 선택적으로 열린 변환 대화 상자를 닫습니다.

- 변환 객체를 닫습니다.

Test_cvDlg s를 참조하세요amppco.sdk의 leample 폴더. v1.20부터 음수 색조 값의 범위가 두 배로 늘어났습니다.
- 우편 주소: Excelitas PCO GmbH Donaupark 11 93309 켈하임, 독일
- 전화: +49 (0) 9441 2005 0
- 이메일: pco@excelitas.com
- web: www.excelitas.com/pco


문서 / 리소스
 |
EXCELITAS TECHNOLOGIES pco.convert 현미경 카메라 [PDF 파일] 사용자 매뉴얼 pco.convert 현미경 카메라, pco.convert, 현미경 카메라, 카메라 |



