EXCELITAS TECHNOLOGIES pco.convert Cámara para microscopio

Presupuesto
- Nombre del producto: pco. convert
- Versión: 1.52.0
- Licencia: Creative Commons Attribution-NoDerivatives 4.0 Licencia internacional
- Fabricante: Excelitas PCO GmbH
- Dirección: Donaupark 11, 93309 Kelheim, Alemania
- Contacto: +49 (0) 9441 2005 50
- Correo electrónico: pco@excelitas.com
- Websitio: www.excelitas.com/product-category/pco
Instrucciones de uso del producto
Información general
El pco.convert ofrece varias funciones para la conversión de color y pseudocolor. Es importante seguir las instrucciones proporcionadas en el manual del usuario para obtener un rendimiento óptimo.
Descripción de la función Convertir API
La API Convert proporciona un conjunto de funciones para manipular datos de color e imagen. A continuación, se muestran algunas funciones clave:
-
- PCO_ConvertCreate: Crear una nueva instancia de conversión.
- PCO_ConvertDelete: Eliminar una instancia de conversión.
- PCO_ConvertObtener: Obtenga la configuración de conversión.
Conversión de color y pseudocolor
pco.convert admite la conversión tanto a blanco y negro como a color. Siga las instrucciones específicas que se proporcionan en el manual para cada tipo de conversión.
Preguntas frecuentes
- P: ¿Cómo realizo una conversión de color usando pco.convert?
- R: Para realizar una conversión de color, utilice la función PCO_ConvertGet con los parámetros adecuados como se describe en el manual del usuario.
- P: ¿Puedo eliminar una instancia de conversión?
- R: Sí, puede eliminar una instancia de conversión utilizando la función PCO_ConvertDelete.
manual de usuario
pco.convertir
Excelitas PCO GmbH le pide que lea atentamente y siga las instrucciones de este documento. Para cualquier pregunta o comentario, no dude en contactarnos en cualquier momento.
- teléfono: + 49 (0) 9441 2005 50
- fax: + 49 (0) 9441 2005 20
- Dirección postal: Excelitas PCO GmbH Donaupark 11 93309 Kelheim, Alemania
- correo electrónico: pco@excelitas.com
- web: www.excelitas.com/product-category/pco
pco.convertir
manual de usuario 1.52.0
Lanzamiento en mayo de 2024
©Copyright Excelitas PCO GmbH

Este trabajo está bajo la licencia Creative Commons Attribution-NoDerivatives 4.0 International License. A view una copia de esta licencia, visite http://creativecommons.org/licenses/by-nd/4.0/ o envíe una carta a Creative Commons, PO Box 1866, Mountain View, CA 94042, EE. UU.
General
- Esta descripción del SDK de conversión se puede utilizar para implementar las rutinas de conversión de PCO en aplicaciones propietarias que se utilizan para controlar cámaras PCO. Está prohibido utilizar las rutinas de conversión con cámaras de terceros.
- El pco.convertir El SDK consta de dos partes: Las funciones de conversión LUT pco.conv.dll y las funciones de diálogo pco_cdlg.dll .
Las funciones de conversión se utilizan para convertir áreas de datos en blanco y negro y en color con una resolución de más de 8 bits por píxel en áreas de datos en blanco y negro con una resolución de 8 bits por píxel o en áreas de datos en color con una resolución de 24 (32) bits por píxel. La DLL también incluye funciones para crear y rellenar los distintos objetos de conversión. - La segunda parte de la API contiene las funciones de diálogo. Los diálogos son simples diálogos de interfaz gráfica de usuario que permiten al usuario configurar los parámetros de los objetos de conversión. Las funciones de diálogo están incluidas en la pco_cdlg.dll y se basan en algunas funciones de pco.conv.dll.
- En el pco.sdk Para las cámaras pco existen dosamparchivos, que hacen uso del SDK de conversión. Uno es el Test_cvDlg sample y el otro es el sc2_demo. Por favor, eche un vistazo a esosamples para 'ver' las funciones de conversión del SDK en acción.
Conversión de blanco y negro y pseudocolor
El algoritmo de conversión utilizado en la función b/w se basa en la siguiente rutina simple
![]()
dónde
- pos es la variable del contador
- dataout es el área de datos de salida
- datain es el área de datos de entrada
- lutbw es un área de datos de tamaño 2n que contiene la LUT, donde n = resolución del área de entrada en bits por píxel
En la función pseudocolor la rutina básica para convertir a un área de datos RGB es:

dónde
- pos es la variable del contador de entrada
- pout es la variable del contador de salida
- dataout es el área de datos de salida
- datain es el área de datos de entrada
- lutbw es un área de datos de tamaño 2n que contiene la LUT, donde n = resolución del área de entrada en bits por píxel
- lutred, lutgreen, lutblue son áreas de datos de tamaño 2n que contienen la LUT, donde n = resolución del área de salida en bits por píxel.
Conversión de color
- Los sensores de color CCD utilizados en las cámaras en color PCO tienen filtros para los colores rojo, verde y azul. Cada píxel tiene un tipo de filtro, por lo que originalmente no se obtiene información de color completa para cada píxel. Más bien, cada píxel proporciona un valor con un rango dinámico de 12 bits para el color que pasa el filtro.
- Todas las cámaras en color de PCO funcionan con el mosaico de filtros Bayer DE. El patrón de filtros de color de estos sensores de imagen en color se puede reducir a una matriz de 2x2. El propio sensor de imagen se puede considerar como una matriz de estas matrices de 2x2.
- Supongamos este patrón de color
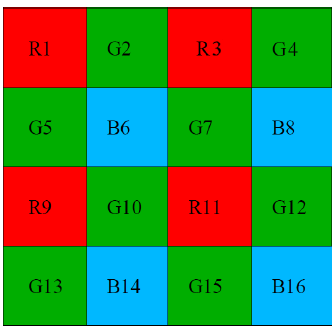
El color en sí es sólo una interpretación de la matriz. Esta interpretación se realizará mediante el llamado algoritmo de demostración. El pco_conv.dll funciona con un método propietario especial.
Descripción de la función Convertir API
PCO_ConvertirCrear
Descripción
Crea un nuevo objeto de conversión basado en la estructura PCO_SensorInfo. El identificador de conversión creado se utilizará durante la conversión. Llame a PCO_ConvertDelete antes de que la aplicación cierre y descargue el archivo dll de conversión.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANEJAR* | Puntero a un identificador que recibirá el objeto de conversión creado. |
| strSensor | PCO_SensorInfo* | Puntero a una estructura de información del sensor. No olvide configurar el parámetro wSize. |
| iConvertTipo | entero | Variable para determinar el tipo de conversión, ya sea b/n, color, pseudocolor o color 16 |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ConvertirEliminar
Descripción
Elimina un objeto de conversión creado previamente. Es obligatorio llamar a esta función antes de cerrar la aplicación.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, código de error en caso contrario. |
PCO_ConvertObtener
Descripción
Obtiene todos los valores de un objeto de conversión creado previamente.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrConvertir | PCO_Convertir* | Puntero a una estructura de conversión pco |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, código de error en caso contrario. |
Conjunto de conversión PCO_ConvertSet
Descripción
Establece los valores necesarios para un objeto de conversión creado previamente.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrConvertir | PCO_Convertir* | Puntero a una estructura de conversión pco |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ConvertGetDisplay
Descripción
Obtiene la estructura PCO_Display
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrMostrar | Pantalla PCO* | Puntero a una estructura de visualización pco |
Valor de retorno
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrMostrar | Pantalla PCO* | Puntero a una estructura de visualización pco |
PCO_ConvertirConfigurarVisualización
Descripción
Establece la estructura PCO_Display
Prototipo
 Parámetro
Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrMostrar | Pantalla PCO* | Puntero a una estructura de visualización pco |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ConvertSetBayer
Descripción
Establece los valores de la estructura Bayer de un objeto de conversión creado previamente. Utilice esta función para cambiar los parámetros del patrón Bayer.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pstrBayer | PCO_Bayer* | Puntero a una estructura PCO Bayer |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ConvertirConjuntoFiltro
Descripción
Establece los valores de la estructura de filtro de un objeto de conversión creado previamente.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| prefiltro | Filtro PCO* | Puntero a una estructura de filtro pco |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ConvertSetSensorInfo
Descripción
Establece la estructura PCO_SensorInfo para un objeto de conversión creado previamente
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| Información del sensor pstr | PCO_SensorInfo* | Puntero a una estructura de información del sensor. No olvide configurar el parámetro wSize |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_SetPseudoLut
Descripción
Cargue las tres tablas de colores pseudolut del gráfico
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| pseudo_lut | carácter sin signo* | Puntero a valores de color pseudo lut (colores R, G, B: 256 * 3 bytes o 4 bytes) |
| inumcolores | entero | Establezca en 3 para R,G,B o 4 para R,G,B,A |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_LoadPseudoLut
Descripción
Carga una pseudotabla de búsqueda de color en el objeto de conversión. Esta función se puede utilizar para cargar algunas de las pseudotablas de búsqueda predefinidas o creadas por el usuario.
Prototipo

Parámetro
| Nombre Descripción del tipo | ||||||
| ph | MANGO | Identificar un objeto de conversión creado previamente | ||||
| formato | entero | 0 | parte 1, 1 | parte 2, 2 | parte 3, 3 | lt4 |
| filenombre | carbonizarse* | Nombre de la file Para cargar | ||||
Valor de retorno
| Nombre Descripción del tipo | ||||||
| ph | MANGO | Identificar un objeto de conversión creado previamente | ||||
| formato | entero | 0 | parte 1, 1 | parte 2, 2 | parte 3, 3 | lt4 |
| filenombre | carbonizarse* | Nombre de la file Para cargar | ||||
PCO_Convertir16A8
Descripción
Convertir datos de imagen en b16 a datos de 8 bits en b8 (escala de grises)
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| modo | entero | Parámetro de modo |
| modo icol | entero | Parámetros del modo de color |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| b16 | palabra* | Puntero a la imagen sin procesar |
| b8 | byte* | Puntero a imagen en blanco y negro de 8 bits convertida |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Convertir16A24
Descripción
Convertir datos de imagen en b16 a datos de 24 bits en b24 (escala de grises)
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| modo | entero | Parámetro de modo |
| Nombre | Tipo | Descripción |
| modo icol | entero | Parámetros del modo de color |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| b16 | palabra* | Puntero a la imagen sin procesar |
| b24 | byte* | Puntero a imagen de color de 24 bits convertida |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Convert16TOCOL
Descripción
Convertir datos de imagen en b16 a datos RGB en b8 (color)
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| modo | entero | Parámetro de modo |
| modo icol | entero | Parámetros del modo de color |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| b16 | palabra* | Puntero a la imagen sin procesar |
| b8 | byte* | Puntero a imagen de color de 24 bits convertida |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Convert16TOPSEUDO
Descripción
Convertir datos de imagen en b16 a datos de pseudocolor en b8 (color)
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| modo | entero | Parámetro de modo |
| modo icol | entero | Parámetros del modo de color |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| b16 | palabra* | Puntero a la imagen sin procesar |
| b8 | byte* | Puntero a imagen pseudocolor de 24 bits convertida |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Convert16TOCOL16
Descripción
Convertir datos de imagen en b16 a datos RGB en b16 (color)
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| modo | entero | Parámetro de modo |
| Nombre | Tipo | Descripción |
| modo icol | entero | Parámetros del modo de color |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| b16 pulgadas | palabra* | Puntero a la imagen sin procesar |
| b16fuera | palabra* | Puntero a imagen de color de 48 bits convertida |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_ObtenerBalanceBlanco
Descripción
Obtiene valores de balance de blancos para color_temp y tinte
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| ph | MANGO | Identificar un objeto de conversión creado previamente |
| temperatura de color | entero* | puntero int para obtener la temperatura de color calculada |
| tinte | entero* | puntero int para obtener el valor de tinte calculado |
| modo | entero | Parámetro de modo |
| ancho | entero | Ancho de la imagen a convertir |
| altura | entero | Altura de la imagen a convertir |
| gb12 | PALABRA* | Puntero a la matriz de datos de imagen sin procesar |
| x_min | entero | Rectángulo para establecer la región de la imagen que se utilizará para el cálculo |
| y_min | entero | Rectángulo para establecer la región de la imagen que se utilizará para el cálculo |
| x_máximo | entero | Rectángulo para establecer la región de la imagen que se utilizará para el cálculo |
| y_máximo | entero | Rectángulo para establecer la región de la imagen que se utilizará para el cálculo |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Obtener límite máximo
Descripción
GetMaxLimit obtiene los valores RGB para una temperatura y un tinte determinados. El valor máximo dentro del cuadro de diálogo de control de conversión no debe exceder el valor más grande de los valores RGB, por ejemplo, en caso de que R sea el valor más grande, el valor máximo puede aumentar hasta que el valor R alcance la resolución de bits (4095). Se debe cumplir la misma condición para disminuir el valor máximo, por ejemplo, en caso de que B sea el valor más bajo, el valor máximo puede disminuir hasta que el valor B alcance el valor mínimo.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| r_máximo | flotador* | Puntero a un flotante que recibe el valor rojo máximo |
| g_máx | flotador* | Puntero a un flotante que recibe el valor verde máximo |
| b_máx | flotador* | Puntero a un flotante que recibe el valor azul máximo |
| temperatura | flotar | Temperatura del color |
| tinte | flotar | Ajuste del tono |
| bits de salida | entero | Resolución de bits de la imagen convertida (normalmente 8) |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_Obtener valores de color
Descripción
Obtiene la temperatura del color y el tinte para valores máximos de R,G,B dados.
GetColorValues se utiliza únicamente en pco.camware Calcula la temperatura y el matiz del color en función de los valores Rmax, Gmax y Bmax del antiguo LUT de color. Los valores calculados se utilizan para convertir imágenes antiguas b16 y tif16 con las nuevas rutinas de conversión.
Prototipo

Parámetro
| Nombre | Tipo | Descripción |
| pfTemperatura de color | flotador* | Puntero a un flotante para recibir la temperatura del color |
| pfTemperatura de color | flotador* | Puntero a un flotador para recibir el tinte de color. |
| iRedMax | entero | Entero para establecer el valor máximo actual para el rojo |
| iGreenMax | entero | Entero para establecer el valor máximo actual para verde. |
| iBlueMax | entero | Entero para establecer el valor máximo actual para el azul |
Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
Estructura PCO_WhiteBalanceToDisplay
Descripción
Calcula el balance de blancos y establece los valores en la estructura strDisplay manteniendo los límites. Obtiene la estructura str Display del controlador de conversión internamente
Prototipo

Parámetro

Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
PCO_GetVersionInfoPCO_CONV
Descripción
Devuelve información de la versión de la dll.
Prototipo


Parámetro

Valor de retorno
| Nombre | Tipo | Descripción |
| Mensaje de error | entero | 0 en caso de éxito, Errorcode en caso contrario. |
Implementación típica
Esta implementación típica paso a paso muestra el manejo básico.
- Declaraciones

- Establezca todos los parámetros de 'tamaño' del búfer en los valores esperados:

- Establezca los parámetros de información del sensor y cree el objeto de conversión

- Opcionalmente, abrir un cuadro de diálogo de conversión

- Establezca el valor mínimo y máximo en el rango deseado y configúrelos en el objeto de conversión.

- Realice la conversión y configure los datos en el cuadro de diálogo si éste está abierto

- Cerrar el cuadro de diálogo de conversión abierto opcionalmente

- Cerrar el objeto convertido:

Ver los Test_cvDlg samparchivo en el pco.sdk sampcarpeta. A partir de la versión 1.20, el rango del valor de tinte negativo se ha duplicado.
- Dirección postal: Excelitas PCO GmbH Donaupark 11 93309 Kelheim, Alemania
- teléfono: +49 (0) 9441 2005 0
- correo electrónico: pco@excelitas.com
- web: www.excelitas.com/pco


Documentos / Recursos
 |
EXCELITAS TECHNOLOGIES pco.convert Cámara para microscopio [pdf] Manual del usuario pco.convert Cámara para microscopio, pco.convert, Cámara para microscopio, Cámara |



