![]() Z-1Pro
Z-1Pro
សៀវភៅណែនាំអ្នកប្រើប្រាស់ © 2025 XF រក្សាសិទ្ធិគ្រប់យ៉ាង
© 2025 XF រក្សាសិទ្ធិគ្រប់យ៉ាង
ការប្រើប្រាស់សៀវភៅណែនាំនេះ - រឿងព្រេង

ប្រវត្តិកែប្រែ
| កាលបរិច្ឆេទ | កំណែឯកសារ |
| 2024.06.17 | វី៣៥ |
| 2024.10.15 | វី៣៥ |
| 2025.01.15 | វី៣៥ |
| 2025.07.04 | វី៣៥ |
ការប្រុងប្រយ័ត្ន
- នៅពេលមិនប្រើ សូមទុកផតនៅក្នុងប្រអប់កញ្ចប់។ បរិយាកាសផ្ទុកដែលបានណែនាំគឺសំណើមដែលទាក់ទងតិចជាង 40% នៅសីតុណ្ហភាព 20±5°C។ ប្រសិនបើកែវថតឡើងអ័ព្ទ។ ជាធម្មតា ចំហាយទឹកនឹងរលាយបាត់បន្ទាប់ពីបើកឧបករណ៍មួយរយៈ។
- កុំដាក់ផលិតផលនៅក្រោមពន្លឺព្រះអាទិត្យដោយផ្ទាល់នៅក្នុងតំបន់ដែលមានខ្យល់អាកាសមិនល្អឬនៅជិតប្រភពកម្តៅដូចជាម៉ាស៊ីនកម្តៅ។
- កុំបើក / បិទផលិតផលឱ្យញឹកញាប់។ បន្ទាប់ពីវាត្រូវបានបិទសូមរង់ចាំយ៉ាងហោចណាស់ 30 វិនាទីមុនពេលបើកត្រឡប់មកវិញបើមិនដូច្នេះទេអាយុកាលផលិតផលនឹងរងផលប៉ះពាល់។
- ត្រូវប្រាកដថាច្រកផត និងផ្ទៃផតមិនមានរាវណាមួយមុនពេលដំឡើង។
- សូមប្រាកដថា ផតត្រូវបានដំឡើងយ៉ាងមានសុវត្ថិភាពនៅលើយន្តហោះ។
- កុំដោតឬដកកាត microSD ពេលកំពុងប្រើ។
- កុំប៉ះផ្ទៃនៃកញ្ចក់កាមេរ៉ា ហើយទុកវាឱ្យឆ្ងាយពីវត្ថុរឹង។ ការធ្វើដូច្នេះអាចនាំឱ្យរូបភាពមិនច្បាស់ និងប៉ះពាល់ដល់គុណភាពរូបភាព។
- សម្អាតផ្ទៃរបស់កញ្ចក់កាមេរ៉ាដោយប្រើក្រណាត់ទន់ស្ងួតស្អាត។ កុំប្រើសាប៊ូបោកខោអាវអាល់កាឡាំង។
- នៅពេលដែលមិនទទួលបានទិន្នន័យ INS របស់ក្រុមហ៊ុនដឹកជញ្ជូនត្រឹមត្រូវ អ័ក្សរបស់ផតនឹងរសាត់ប្រហែល 15 ដឺក្រេក្នុងមួយម៉ោងដោយសារតែការបង្វិលផែនដី។ ដើម្បីធ្វើឱ្យប្រាកដថាឥរិយាបថរបស់ pod ត្រឹមត្រូវ វាចាំបាច់ក្នុងការបញ្ជូនទិន្នន័យ INS របស់ក្រុមហ៊ុនផ្តល់សេវាត្រឹមត្រូវ ដែលជាធម្មតា GNSS គួរតែត្រូវបានកំណត់ទីតាំង។
- When its dampនៅក្នុងវេទិកាដែលផ្អៀងលើ 45° ផតនឹងកេះរបៀបការពារ ហើយត្រឡប់ទៅទីតាំងអព្យាក្រឹតរបស់វា។ (លើកលែងតែនៅក្នុងរបៀប FPV)
សេចក្តីផ្តើម
សង្ខេប
The Z-1Pro carriers an ultra-starlight image sensor visible light camera. Combined with the AI-ISP full-color night vision imaging engine and the AI-HDR imaging engine, can present clear full-color images weather in extremely low-light environments or in complex lighting environments. Featuring AI multi-object detection and tracking, the Z-1Pro can constantly track one of the persons and vehicles intelligently identified in the image.
Z-1Pro មានរចនាសម្ព័ន្ធទប់លំនឹងមេកានិកដែលមិនមានអ័ក្ស 3 អ័ក្ស គាំទ្រទាំងការដំឡើងចុះក្រោម និងឡើងលើ។ ជាមួយនឹងកម្មវិធី Dragonfly អ្នកប្រើប្រាស់អាចមើលរូបភាព និងគ្រប់គ្រង pod ដោយមិនចាំបាច់ប្រើ protocol ducking។ រួមបញ្ចូលជាមួយកម្មវិធី XF-QGC វាសម្រេចបាននូវភាពឆបគ្នានៃមុខងារដ៏ទូលំទូលាយជាមួយ opensource autopilots ។
លក្ខណៈ
- Carriers an ultra-starlight image sensor visible light camera, combined with the AI-ISP full-color night vision imaging engine, can present clear full-color images in extremely low-light environments, delivering night vision-level low-light imaging experience. Featuring Al-HDR, it ensures both highlights and shadow details remain vividly visible even in complex lighting scenarios with extreme brightness contrasts.
- Features Al multi-object detection and tracking, which can constantly track one of the persons and vehicles intelligently identified in the image.
- រចនាសម្ព័ន្ធស្ថេរភាពមេកានិក 3-axis nonnorthogonal ខ្នាតតូចកាត់បន្ថយទម្ងន់បានដល់ 100g។
- Supports network, UART and S.BUS control and compatible with both private protocol and MAVLink protocol.
- Thanks to the Dual-IMU complementary algorithms with IMU temperature control and carrier AHRS fusion, the gimbal provides a stabilization accuracy at ±0.01.
- អាចត្រូវបានដាក់លើក្រុមហ៊ុនបញ្ជូនច្រើន មិនថាចុះក្រោម ឬឡើងលើ។
- ជាមួយនឹងកម្មវិធី Dragonfly អ្នកប្រើប្រាស់អាចមើលរូបភាព និងគ្រប់គ្រង pod ដោយមិនចាំបាច់ប្រើ protocol ducking និងទាញយករូបថត និងវីដេអូតាមអ៊ីនធឺណិតផងដែរ។
- ជាមួយនឹងកម្មវិធី QGC ដែលប្ដូរតាមបំណង មុខងារទាំងអស់របស់ផតអាចសម្រេចបានដោយភ្ជាប់ជាមួយប្រភពបើកចំហរស្វ័យប្រវត្តិ។
- Screen supports overlaying OSD information. Image supports EXIF saving. Live video stream and recording supports SEI saving. (The SEI functionality will be supported via subsequent firmware updates)
10-26.4 VDC wide voltagអ៊ីបញ្ចូល។
ជាងview
 គ្រឿងបន្លាស់
គ្រឿងបន្លាស់


- ខ្សែថាមពល
- SIYI AirUnit Net Cable
- SKYDROID H16 ខ្សែសុទ្ធ
- ឧបករណ៍បំលែងបណ្តាញ / SKYDROID H12Pro / H30 ខ្សែសុទ្ធ
- ប្រភពបើកចំហរ Autopilot UART Cable
- ខ្សែ S.BUS
និយមន័យច្រក

| ច្រក | ការពិពណ៌នា | បឋមកថា | ម្ជុល | និយមន័យ |
| រន្ធ HDMI | សម្រាប់លទ្ធផលវីដេអូ | មីក្រូ HDMI | – | – |
| SP | Audio out (Will be supported via subsequent formware updates) | SM03B-SRSS-TB | 1 | GND |
| 2 | AUDIO_OUT+ | |||
| 3 | AUDIO_OUT- | |||
| MIC | Audio in (Will be supported via subsequent formware updates) | SM02B-SRSS-TB | 1 | MIC+ |
| 2 | MIC- | |||
| យូអេសប៊ី | កក់ទុក | SM03B-SRSS-TB | 1 | GND |
| 2 | USB_D + | |||
| 3 | USB_D- | |||
| ETH | សម្រាប់ការកំណត់រចនាសម្ព័ន្ធ និងការដំឡើង GCU ការគ្រប់គ្រងពិធីការឯកជន លទ្ធផលវីដេអូ និងការភ្ជាប់ AICore | SM04B-SRSS-TB | 1 | ETH_Tx+ |
| 2 | ETH_Tx- | |||
| 3 | ETH_Rx+ | |||
| 4 | ETH_Rx- | |||
| UART2 | For GCU IP configuration, private protocol control and MAVLink protocol control | SM03B-SRSS-TB | 1 | GND |
| 2 | UART_Rx (0 ~ 3.3V) | |||
| 3 | UART_Tx (0 ~ 3.3V) | |||
| PWR | ថាមពលក្នុង និងភ្ជាប់ AICore Operating Voltage: 10 ~ 26.4VDC | SM06B-SRSS-TB | 1 | ថាមពលចូល |
| 2 | ||||
| 3 | GND | |||
| 4 | ||||
| 5 | UART_AICore_Rx | |||
| 6 | UART_AICore_Tx | |||
| UART1 | សម្រាប់ការធ្វើឱ្យប្រសើរឡើង gimbal | SM03B-SRSS-TB | 1 | GND |
| 2 | UART_Rx (0 ~ 3.3V) | |||
| 3 | UART_Tx (0 ~ 3.3V) | |||
| អេស.ប៊ីស | S.BUS ដែលត្រូវគ្នាជាមួយស្តង់ដារ S.BUS1 ដូចជា FASST និង SFHSS និង S.BUS2 ដូចជា FASSTes | SM02B-SRSS-TB | 1 | GND |
| 2 | S.BUS ចូល |
ការដំឡើង
ប្រើវីស 4 x M2 ដើម្បីជួសជុល ឃamping platform ទៅក្រុមហ៊ុនដឹកជញ្ជូន និងបម្រុងទុកកន្លែងគ្រប់គ្រាន់សម្រាប់ damping.
![]() កុំភ្ជាប់ផតផតទៅនឹងក្រុមហ៊ុនដឹកជញ្ជូន ហើយត្រូវប្រាកដថាផតមិនប៉ះជាមួយក្រុមហ៊ុនដឹកជញ្ជូនអំឡុងពេលប្រើប្រាស់។
កុំភ្ជាប់ផតផតទៅនឹងក្រុមហ៊ុនដឹកជញ្ជូន ហើយត្រូវប្រាកដថាផតមិនប៉ះជាមួយក្រុមហ៊ុនដឹកជញ្ជូនអំឡុងពេលប្រើប្រាស់។
ផើងឡើងកំដៅពេលដំណើរការ។ សូមប្រាកដថាឧបករណ៍នេះត្រជាក់ល្អ។
Micro-pod Cooling Kit អាចត្រូវបានប្រើដើម្បីជួយក្នុងការបញ្ចេញកំដៅ។
ដំឡើងឧបករណ៍ត្រជាក់នៅផ្នែកខាងលើនៃផតជាមួយនឹងវីស 4 M1.6 x L4mm ។

![]() គាំទ្រកាត microSD U3/V30 ឬលើសពីនេះ ដែលមានទំហំរហូតដល់ 256GB។
គាំទ្រកាត microSD U3/V30 ឬលើសពីនេះ ដែលមានទំហំរហូតដល់ 256GB។
![]() The Micro-pod Cooling Kit is sold separately.The M2 screws for fixing the pod are not incluede in the package.
The Micro-pod Cooling Kit is sold separately.The M2 screws for fixing the pod are not incluede in the package.
![]() Micro-pod Cooling Kit ត្រូវការថាមពលដាច់ដោយឡែក ហើយជួរផ្គត់ផ្គង់ថាមពលគឺ 10~26.4VDC @0.5W។
Micro-pod Cooling Kit ត្រូវការថាមពលដាច់ដោយឡែក ហើយជួរផ្គត់ផ្គង់ថាមពលគឺ 10~26.4VDC @0.5W។
ការកំណត់រចនាសម្ព័ន្ធ & ធ្វើឱ្យប្រសើរឡើង
![]() ត្រូវប្រាកដថា gimbal និង GCU ទាំងពីរត្រូវបានដំឡើងកំណែទៅកម្មវិធីបង្កប់ចុងក្រោយបំផុតមុនពេលប្រើ។ បើមិនដូច្នោះទេ ការប្រើប្រាស់អាចនឹងរងផលប៉ះពាល់។
ត្រូវប្រាកដថា gimbal និង GCU ទាំងពីរត្រូវបានដំឡើងកំណែទៅកម្មវិធីបង្កប់ចុងក្រោយបំផុតមុនពេលប្រើ។ បើមិនដូច្នោះទេ ការប្រើប្រាស់អាចនឹងរងផលប៉ះពាល់។
![]() ត្រូវប្រាកដថាអ្នកមុជទឹកនៃម៉ូឌុលកំណត់រចនាសម្ព័ន្ធត្រូវបានដំឡើងនៅលើកុំព្យូទ័រមុនពេលកំណត់រចនាសម្ព័ន្ធ ឬធ្វើឱ្យប្រសើរឡើង។
ត្រូវប្រាកដថាអ្នកមុជទឹកនៃម៉ូឌុលកំណត់រចនាសម្ព័ន្ធត្រូវបានដំឡើងនៅលើកុំព្យូទ័រមុនពេលកំណត់រចនាសម្ព័ន្ធ ឬធ្វើឱ្យប្រសើរឡើង។
![]() មុនពេលកំណត់រចនាសម្ព័ន្ធ កុំព្យូទ័រគួរតែត្រូវបានកំណត់ទៅអាសយដ្ឋាន IP ឋិតិវន្ត ដែលស្ថិតនៅក្នុងផ្នែកបណ្តាញដូចគ្នាជាមួយ GCU (ដោយមិនមានជម្លោះអាសយដ្ឋាន IP) ។ អាសយដ្ឋាន IP លំនាំដើមរបស់ GCU គឺ 192.168.144.108
មុនពេលកំណត់រចនាសម្ព័ន្ធ កុំព្យូទ័រគួរតែត្រូវបានកំណត់ទៅអាសយដ្ឋាន IP ឋិតិវន្ត ដែលស្ថិតនៅក្នុងផ្នែកបណ្តាញដូចគ្នាជាមួយ GCU (ដោយមិនមានជម្លោះអាសយដ្ឋាន IP) ។ អាសយដ្ឋាន IP លំនាំដើមរបស់ GCU គឺ 192.168.144.108
![]() កុំបិទឧបករណ៍ខណៈពេលកំពុងដំឡើងកំណែ។ ចាប់ផ្តើមឧបករណ៍ឡើងវិញ នៅពេលដែលការអាប់ដេតបានបញ្ចប់។
កុំបិទឧបករណ៍ខណៈពេលកំពុងដំឡើងកំណែ។ ចាប់ផ្តើមឧបករណ៍ឡើងវិញ នៅពេលដែលការអាប់ដេតបានបញ្ចប់។
- Connect the computer and ETH port with the Network Conversion Module.
ថាមពលនៅលើឧបករណ៍។ - ដំណើរការកម្មវិធី Dragonfly display and control software ដើម្បីបញ្ជាក់ថាវាត្រូវបានភ្ជាប់ទៅ pod ។ បើកទំព័រការកំណត់។
- បើកការកំណត់ ហើយកំណត់រចនាសម្ព័ន្ធផតថលបច្ចុប្បន្ន។
- នៅពេលដែលការកំណត់ត្រូវបានបញ្ចប់សូមចុច "រក្សាទុក" ។
- ចាប់ផ្ដើមផតឡើងវិញ ដើម្បីបើកការកំណត់រចនាសម្ព័ន្ធឱ្យមានប្រសិទ្ធភាព។
![]() For instructions on Net Settings, CAMERA, S.BUS Setting, Calibration,
For instructions on Net Settings, CAMERA, S.BUS Setting, Calibration,
![]() Carrier, and Advance, please refer to the Dragonfly Quick Start Guide – Ribbon – Settings, or visit the www.allxianfei.com to get information in the Video Center.
Carrier, and Advance, please refer to the Dragonfly Quick Start Guide – Ribbon – Settings, or visit the www.allxianfei.com to get information in the Video Center.
![]() បន្ទាប់ពីបើកដំណើរការ OSD ឬការទទួលស្គាល់គោលដៅ ការពន្យាពេលការផ្សាយវីដេអូនឹងកើនឡើង ហើយអត្រាស៊ុមនឹងថយចុះ។
បន្ទាប់ពីបើកដំណើរការ OSD ឬការទទួលស្គាល់គោលដៅ ការពន្យាពេលការផ្សាយវីដេអូនឹងកើនឡើង ហើយអត្រាស៊ុមនឹងថយចុះ។
![]() នៅពេលផ្លាស់ប្តូរគុណភាពបង្ហាញនៃការផ្សាយវីដេអូ កម្មវិធី Dragonfly ឬអ្នកលេងត្រូវចាប់ផ្តើមឡើងវិញ។
នៅពេលផ្លាស់ប្តូរគុណភាពបង្ហាញនៃការផ្សាយវីដេអូ កម្មវិធី Dragonfly ឬអ្នកលេងត្រូវចាប់ផ្តើមឡើងវិញ។
![]() បន្ទាប់ពីកែប្រែការកំណត់បណ្តាញ ផត gimbal នឹងចាប់ផ្ដើមឡើងវិញដោយស្វ័យប្រវត្តិ។
បន្ទាប់ពីកែប្រែការកំណត់បណ្តាញ ផត gimbal នឹងចាប់ផ្ដើមឡើងវិញដោយស្វ័យប្រវត្តិ។
ការធ្វើឱ្យប្រសើរ GCU
![]() មុននឹងធ្វើការអាប់ដេតកម្មវិធីបង្កប់ សូមប្រាកដថាកម្មវិធី Dragonfly ត្រូវបានបិទ។
មុននឹងធ្វើការអាប់ដេតកម្មវិធីបង្កប់ សូមប្រាកដថាកម្មវិធី Dragonfly ត្រូវបានបិទ។
- ភ្ជាប់កុំព្យូទ័រ និងច្រក ETH ជាមួយម៉ូឌុលបំប្លែងបណ្តាញ។ ថាមពលនៅលើឧបករណ៍។
- ដំណើរការឧបករណ៍ធ្វើឱ្យប្រសើរឡើង GCU ។
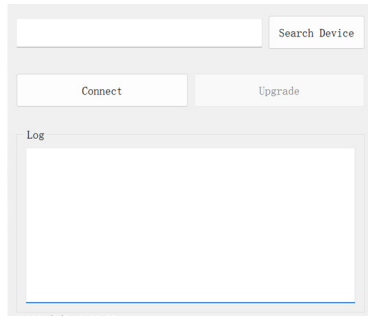
- ចុចប៊ូតុង "ស្វែងរកឧបករណ៍" ហើយរង់ចាំការស្វែងរកកុំព្យូទ័រម៉ាស៊ីនបញ្ចប់។
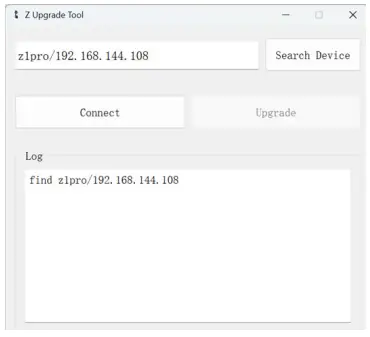
- បន្ទាប់ពីការស្វែងរកបានបញ្ចប់សូមចុច "ភ្ជាប់" ហើយរង់ចាំការតភ្ជាប់ដើម្បីបញ្ជាក់ថាការតភ្ជាប់បានជោគជ័យ។
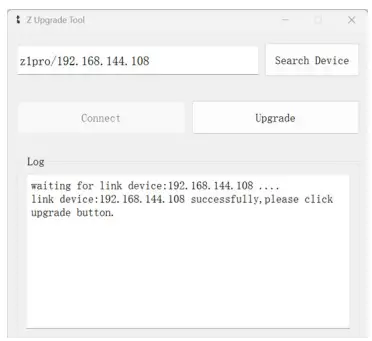
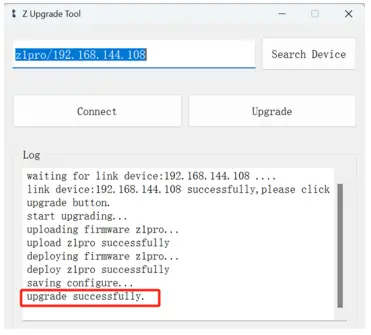
- បន្ទាប់ពីការតភ្ជាប់បានជោគជ័យ សូមចុច “Upgrade” ហើយឧបករណ៍នឹងចាប់ផ្តើមធ្វើឱ្យប្រសើរឡើង។ រង់ចាំកម្មវិធីដើម្បីជំរុញឱ្យ "ធ្វើឱ្យប្រសើរឡើងដោយជោគជ័យ" ដើម្បីបង្ហាញថាការធ្វើឱ្យប្រសើរឡើងបានជោគជ័យ។
![]() បន្ទាប់ពីការអាប់ដេតកម្មវិធីបង្កប់ GCU ការកំណត់រចនាសម្ព័ន្ធទាំងអស់នឹងត្រូវបានស្ដារឡើងវិញទៅតម្លៃលំនាំដើម។
បន្ទាប់ពីការអាប់ដេតកម្មវិធីបង្កប់ GCU ការកំណត់រចនាសម្ព័ន្ធទាំងអស់នឹងត្រូវបានស្ដារឡើងវិញទៅតម្លៃលំនាំដើម។
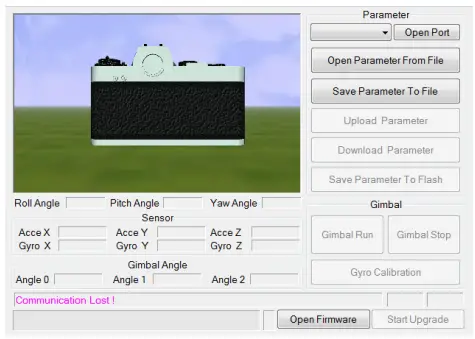
ការធ្វើឱ្យប្រសើរ Gimbal
![]() ត្រូវប្រាកដថាកម្មវិធីបញ្ជានៃម៉ូឌុលកំណត់រចនាសម្ព័ន្ធត្រូវបានដំឡើងនៅលើកុំព្យូទ័រមុនពេលធ្វើបច្ចុប្បន្នភាព។
ត្រូវប្រាកដថាកម្មវិធីបញ្ជានៃម៉ូឌុលកំណត់រចនាសម្ព័ន្ធត្រូវបានដំឡើងនៅលើកុំព្យូទ័រមុនពេលធ្វើបច្ចុប្បន្នភាព។
- ភ្ជាប់ច្រក UART1 និងកុំព្យូទ័រជាមួយម៉ូឌុលកំណត់រចនាសម្ព័ន្ធ J1.0 ។ បង្កើនថាមពលកួរ។
- Run GimbalConfig software. Select the COM port corresponding to the Config Module. Click “Open Port” and confirm the software and the gimbal being connected.
- ចុច "បើកកម្មវិធីបង្កប់" ។ ជ្រើសរើសកម្មវិធីបង្កប់ file. ចុច "ចាប់ផ្តើមធ្វើឱ្យប្រសើរឡើង" ហើយរង់ចាំការធ្វើឱ្យប្រសើរបញ្ចប់។
 សម្រាប់ម៉ាកមួយចំនួននៃខ្សែ Type-C ពីរអាចមានករណីដែលកុំព្យូទ័រមិនអាចស្គាល់ម៉ូឌុលកំណត់រចនាសម្ព័ន្ធ។ សូមព្យាយាមជំនួសវាដោយខ្សែ Type-A ទៅ Type-C។
សម្រាប់ម៉ាកមួយចំនួននៃខ្សែ Type-C ពីរអាចមានករណីដែលកុំព្យូទ័រមិនអាចស្គាល់ម៉ូឌុលកំណត់រចនាសម្ព័ន្ធ។ សូមព្យាយាមជំនួសវាដោយខ្សែ Type-A ទៅ Type-C។
ការលេងវីដេអូតាមពេលវេលាជាក់ស្តែង
Example ជាអាសយដ្ឋាន IP របស់កាមេរ៉ា 192.168.144.108:
អាសយដ្ឋានផ្សាយ៖ rtsp://192.168.144.108
ការការពារកំដៅលើស
នៅពេលដែលសីតុណ្ហភាពស៊ីភីយូរបស់ផតមានលើសពី 80 ℃ ចំណីរបស់កាមេរ៉ានឹងភ្លឹបភ្លែតៗម្តង ហើយចូលទៅក្នុងរបៀបការពារកម្ដៅខ្លាំង ដែលក្នុងអំឡុងពេលនោះអត្រាស៊ុមធ្លាក់ចុះដល់ 5fps ។ ផតចេញដោយស្វ័យប្រវត្តិនូវរបៀបការពារកម្ដៅខ្លាំង នៅពេលដែលសីតុណ្ហភាពស៊ីភីយូធ្លាក់ចុះក្រោម 75 ℃ នៅចំណុចនោះអត្រាស៊ុមត្រឡប់ទៅធម្មតាវិញ។
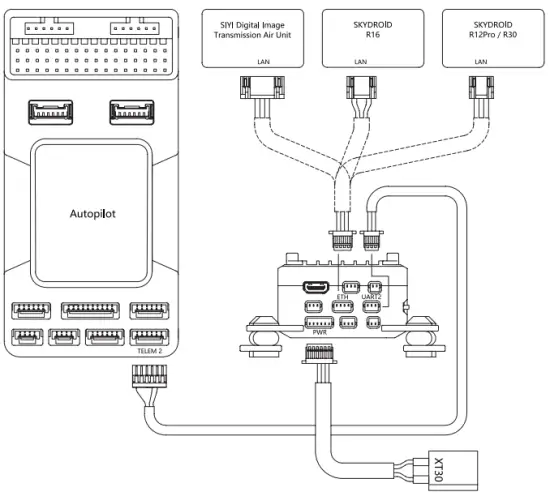
ឧបសម្ព័ន្ធទី 1 ដ្យាក្រាមខ្សែនៃការភ្ជាប់ទៅកាន់ប្រភពបើកចំហរស្វ័យប្រវត្តិ
ការប្រើប្រាស់ច្រក TELEM2 របស់ autopilot ជាអតីតampលេ
ឧបសម្ព័ន្ធទី 2 ដំណើរការទំនាក់ទំនង MAVlink
បន្ទាប់ពីទទួលបាន HeartBeat ពីឧបករណ៍បញ្ជាការហោះហើរ ហើយកំណត់អត្តសញ្ញាណ SYSID និង COMPID នៃឧបករណ៍បញ្ជាជើងហោះហើរ GCU នឹងដំណើរការដូចខាងក្រោម៖
- GCU ផ្ញើកញ្ចប់ MAVLINK_MSG_ID_HEARTBEAT 0 យ៉ាងសកម្មនៅប្រេកង់ 2Hz ។
- GCU requests following packages in turn at a frequency of 1Hz. The flight controller fills these parameters into package MAVLINK_MSG_ID_ COMMAND_LONG 76 until the request completing.:
MAVLINK_MSG_ID_EKF_STATUS_REPORT 193 (គ្មានកញ្ចប់នេះសម្រាប់ PX4);
MAVLINK_MSG_ID_GLOBAL_POSITION_INT 33;
MAVLINK_MSG_ID_SCALED_IMU 26;
MAVLINK_MSG_ID_SYSTEM_TIME 2;
MAVLINK_MSG_ID_RC_CHANNELS 65;
MAVLINK_MSG_ID_CAMERA_TRIGGER 112 (គ្មានកញ្ចប់នេះសម្រាប់ APM);
MAVLINK_MSG_ID_AUTOPILOT_STATE_FOR_GIMBAL_DEVICE 286;
MAVLINK_MSG_ID_GIMBAL_DEVICE_SET_ATTITUDE 284 (មិនមានកញ្ចប់នេះសម្រាប់ APM); - GCU actively sends package MAVLINK_MSG_ID_GIMBAL_DEVICE_ ATTITUDE_STATUS 285 at a frequency of 100 Hz while the packages above being received and the pod being operational.
- ជាទូទៅ ឧបករណ៍បញ្ជាការហោះហើរនឹងស្នើសុំកញ្ចប់ MAVLINK_MSG_ID_ GIMBAL_DEVICE_INFORMATION 283 ដែល GCU មិនផ្ញើយ៉ាងសកម្ម។
ឧបសម្ព័ន្ធទី 3 ការកំណត់រចនាសម្ព័ន្ធ MAVLink
ArduPilot
ការប្រើប្រាស់ច្រក TELEM2 របស់ autopilot ជាអតីតampលេ
| SERIAL2_PROTOCOL | 8 (Gimbal) |
| SERIAL2_BAUD | 115/250/500/1000 (អត្រា Pod baud ការសម្របខ្លួនដោយស្វ័យប្រវត្តិ) |
| CAM1_TYPE | 4 (ភ្នំ) |
| MNT1_TYPE | 14 (XFRobot) |
| MNT1_ROLL_MIN | -៤០ |
| MNT1_ROLL_MAX | 50 |
| MNT1_PITCH_MIN | -៤០ |
| MNT1_PITCH_MAX | 60 |
| MNT1_YAW_MIN | -៤០ |
| MNT1_YAW_MAX | 180 |
| MNT1_RC_RATE | 60 (ដឺក្រេ / វិនាទី) |
| RC6_OPTION | 213 (ភ្នំ) |
| RC7_OPTION | 214 (ភ្នំយ៉ាវ) |
| RC9_OPTION | 163 (ជាប់សោ) |
![]() ទស្សនា https://ardupilot.org/copter/docs/common-xfrobot-gimbal.html សម្រាប់ការគាំទ្របន្ថែមទៀត។
ទស្សនា https://ardupilot.org/copter/docs/common-xfrobot-gimbal.html សម្រាប់ការគាំទ្របន្ថែមទៀត។
PX4
ការប្រើប្រាស់ច្រក TELEM2 របស់ autopilot ជាអតីតampលេ
| MAVLink | |
| MAV_1_CONFIG | តេលេម ២ |
| MAV_1_MODE | ផ្ទាល់ខ្លួន / Gimbal |
| MAV_1_RATE | 115200 B/s |
| សៀរៀល | |
| SER_TEL2_BAUD | 115200 8N1 |
| ភ្នំ | |
| MNT_MAIN_PITCH | AUX ៦ |
| MNT_MAIN_YAW | AUX ៦ |
| MNT_MODE_IN | Auto (RC and Mavlink Gimbal) |
| MNT_MODE_OUT | MAVLink gimbal protocol v2 |
| ការដំឡើងកាមេរ៉ា | |
| របៀបកេះ | ចម្ងាយផ្អែកលើពាក្យបញ្ជា (របៀបស្ទង់មតិ) |
| ចំណុចប្រទាក់កេះ | MAVLink (forward via MAV_CMD_IMAGE_START_CAPTURE) |
![]() MAV_1_MODE ត្រូវបានណែនាំជា Custom ។
MAV_1_MODE ត្រូវបានណែនាំជា Custom ។
![]() AUX1 និង AUX2 គ្រាន់តែជាឧamples ដែលអាចកំណត់ទៅតាមស្ថានភាពជាក់ស្តែង។ វាគួរតែត្រូវបានកំណត់រចនាសម្ព័ន្ធនៅក្នុង RC Map សម្រាប់កម្មវិធីបន្ថែម។
AUX1 និង AUX2 គ្រាន់តែជាឧamples ដែលអាចកំណត់ទៅតាមស្ថានភាពជាក់ស្តែង។ វាគួរតែត្រូវបានកំណត់រចនាសម្ព័ន្ធនៅក្នុង RC Map សម្រាប់កម្មវិធីបន្ថែម។
![]() របៀបកេះគឺគ្រាន់តែជាអតីតample ដែលអាចកែប្រែបានតាមស្ថានភាពជាក់ស្តែង។
របៀបកេះគឺគ្រាន់តែជាអតីតample ដែលអាចកែប្រែបានតាមស្ថានភាពជាក់ស្តែង។
NANJING XIANFEI ROBOT TECHNOLOGY CO., LTD.
ឯកសារ/ធនធាន
 |
XR Robot Z-1 Pro Ultra Starlight Image Sensor ដែលអាចមើលឃើញកាមេរ៉ាពន្លឺ [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ Z-1 Pro Ultra Starlight ឧបករណ៍ចាប់សញ្ញារូបភាពពន្លឺដែលអាចមើលឃើញកាមេរ៉ា Z-1 Pro ឧបករណ៍ចាប់សញ្ញារូបភាពពន្លឺផ្កាយ Ultra កាមេរ៉ាពន្លឺដែលមើលឃើញ ឧបករណ៍ចាប់សញ្ញារូបភាព កាមេរ៉ាពន្លឺដែលមើលឃើញ ឧបករណ៍ចាប់សញ្ញាកាមេរ៉ា កាមេរ៉ាពន្លឺដែលអាចមើលឃើញ កាមេរ៉ាពន្លឺ កាមេរ៉ា |