ការណែនាំអ្នកប្រើប្រាស់ TRINAMIC TMCM-1180 Stepper Motor Controller

TRINAMIC Motion Control GmbH & Co. KG Hamburg ប្រទេសអាល្លឺម៉ង់ www.tinamic.com
ទាញយកពី Arrow.com.
1 លក្ខណៈពិសេស
PD86-1180 គឺជាដំណោះស្រាយ mechatronic ពេញលេញជាមួយនឹងស្ថានភាពនៃសំណុំលក្ខណៈពិសេស។ វាត្រូវបានរួមបញ្ចូលយ៉ាងខ្ពស់ និងផ្តល់នូវការគ្រប់គ្រងដ៏ងាយស្រួល។ PD86-1180 មានម៉ូទ័រ stepper NEMA 34 (ទំហំ 86mm) ឧបករណ៍អេឡិចត្រូនិក ឧបករណ៍បញ្ជា/កម្មវិធីបញ្ជា និងឧបករណ៍បំប្លែងរួមបញ្ចូលគ្នា។ TMCM-1180 គឺជាឧបករណ៍បញ្ជាម៉ូទ័រ stepper ដ៏ឆ្លាតវៃដែលបំពាក់នូវបច្ចេកវិទ្យា coolStepTM ដ៏លេចធ្លោថ្មីសម្រាប់ការគ្រប់គ្រងចរន្តដែលពឹងផ្អែកលើការផ្ទុក sensorless ។ នេះអនុញ្ញាតឱ្យដំណើរការម៉ូទ័រប្រកបដោយប្រសិទ្ធភាពថាមពល។ ជាមួយនឹងលក្ខណៈពិសេសកម្រិតខ្ពស់ stallGuard2TM ការផ្ទុកម៉ូទ័រអាចត្រូវបានរកឃើញជាមួយនឹងគុណភាពបង្ហាញខ្ពស់។ ម៉ូឌុលនេះត្រូវបានរចនាឡើងដើម្បីត្រូវបានម៉ោនដោយផ្ទាល់នៅលើ 86mm flange QMot stepper motor ។
លក្ខណៈពិសេសផ្សេងៗ
ទិន្នន័យអគ្គិសនី
- វ៉ុលផ្គត់ផ្គង់tage: +24V DC ឬ +48V DC ឈ្មោះ
- ចរន្តម៉ូទ័រ៖ រហូតដល់ 5.5A RMS (អាចកម្មវិធីបាន)
ម៉ូទ័រ PANDrive
- ម៉ូទ័រ bipolar stepper ពីរដំណាក់កាលដែលមានឈ្មោះរហូតដល់ 5.5A RMS ។ ឧបករណ៏ចរន្ត
- កម្លាំងបង្វិលជុំ: 7 Nm
ឧបករណ៍បំលែងកូដ
- ឧបករណ៍បំប្លែងម៉ាញេទិក sensOstep (អតិបរមា។ 256 ក្នុងមួយបង្វិល) ឧទាហរណ៍សម្រាប់ការរកឃើញការបាត់បង់ជំហានក្រោមលក្ខខណ្ឌប្រតិបត្តិការ និងទីតាំងទាំងអស់
ឧបករណ៍បញ្ជាចលនារួមបញ្ចូលគ្នា
- គាំទ្រចលនាfile ការគណនាតាមពេលវេលាជាក់ស្តែង (ឧបករណ៍បញ្ជាចលនា TMC428/429)
- នៅលើការផ្លាស់ប្តូរយ៉ាងឆាប់រហ័សនៃប៉ារ៉ាម៉ែត្រម៉ូទ័រ (ឧទាហរណ៍ទីតាំង, ល្បឿន, ការបង្កើនល្បឿន)
- microcontroller ដំណើរការខ្ពស់សម្រាប់ការគ្រប់គ្រងប្រព័ន្ធទាំងមូល និងការគ្រប់គ្រងពិធីការទំនាក់ទំនងសៀរៀល
កម្មវិធីបញ្ជាម៉ូទ័រ bipolar stepper
- រហូតដល់ 256 មីក្រូជំហានក្នុងមួយជំហានពេញ
- ប្រសិទ្ធភាពខ្ពស់ ការសាយភាយថាមពលទាប
- ការគ្រប់គ្រងចរន្តថាមវន្ត
- ការការពាររួមបញ្ចូលគ្នា
- លក្ខណៈពិសេស stallGuard2 សម្រាប់ការរកឃើញតូប
- មុខងារ CoolStep សម្រាប់កាត់បន្ថយការប្រើប្រាស់ថាមពល និងការរំសាយកំដៅ
ចំណុចប្រទាក់
- ធាតុបញ្ចូលសម្រាប់កុងតាក់ឈប់ (ឆ្វេង និងស្តាំ) និងកុងតាក់ផ្ទះ
- ធាតុចូលគោលបំណងទូទៅ និង 2 លទ្ធផលគោលបំណងទូទៅ
- ចំណុចប្រទាក់ទំនាក់ទំនង USB, RS232, RS485 និង CAN (2.0B រហូតដល់ 1Mbit/s)
លក្ខណៈសុវត្ថិភាព
- បិទការបញ្ចូល។ កម្មវិធីបញ្ជានឹងត្រូវបានបិទនៅក្នុងផ្នែករឹង ដរាបណាម្ជុលនេះនៅចំហរ ឬខ្លីដល់ដី
- ការផ្គត់ផ្គង់ដាច់ដោយឡែក voltagធាតុបញ្ចូលសម្រាប់អ្នកបើកបរ និងតក្កវិជ្ជាឌីជីថល – ការផ្គត់ផ្គង់កម្មវិធីបញ្ជា វ៉ុលtage អាចត្រូវបានបិទនៅខាងក្រៅខណៈពេលដែលការផ្គត់ផ្គង់សម្រាប់តក្កវិជ្ជាឌីជីថល ហើយដូច្នេះតក្កវិជ្ជាឌីជីថលនៅតែសកម្ម
កម្មវិធី
- អាចប្រើបានជាមួយ TMCL™ ឬ CANopen
- ប្រតិបត្តិការ TMCL ឯករាជ្យ ឬប្រតិបត្តិការបញ្ជាពីចម្ងាយ
- អង្គចងចាំកម្មវិធី (មិនប្រែប្រួល) សម្រាប់ពាក្យបញ្ជា TMCL រហូតដល់ 2048
- កម្មវិធីអភិវឌ្ឍន៍កម្មវិធីដែលមានមូលដ្ឋានលើកុំព្យូទ័រ TMCL-IDE អាចរកបានដោយឥតគិតថ្លៃ
- CANopen៖ CiA 301 + CiA 402 (របៀបផ្ទះ ប្រូfile របៀបទីតាំង និងរបៀបល្បឿន) ត្រូវបានគាំទ្រ
សូមមើលសៀវភៅណែនាំកម្មវិធីបង្កប់ TMCL និង CANopen ដាច់ដោយឡែកសម្រាប់ព័ត៌មានបន្ថែម
2 លេខកូដបញ្ជាទិញ
ខ្សែមិនត្រូវបានរួមបញ្ចូលទេ។ បន្ថែមខ្សែដែលសមស្របទៅនឹងការបញ្ជាទិញរបស់អ្នកប្រសិនបើចាំបាច់។

3 ចំណុចប្រទាក់មេកានិចនិងអគ្គិសនី
3.1 TMCM-1180 វិមាត្រនិងរន្ធម៉ោន
វិមាត្រនៃផ្ទាំងបញ្ជា/កម្មវិធីបញ្ជា (TMCM-1180) គឺប្រហាក់ប្រហែល។ 86mm x 86mm ដើម្បីឱ្យសមទៅនឹងផ្នែកខាងក្រោយនៃម៉ូទ័រ stepper 86mm ។ TMCM-1180 មានកំពស់ 21.5mm ដោយគ្មានឧបករណ៍ភ្ជាប់ដែលត្រូវគ្នា។ មានរន្ធម៉ោនចំនួនបួនសម្រាប់វីស M4 ។

3.2 PD86-1180 វិមាត្រ និងលក្ខណៈបច្ចេកទេសរបស់ម៉ូទ័រ
PD86-1180 រួមមានម៉ូឌុលអេឡិចត្រូនិច TMCM-1180 stepper motor controller/driver, magnetic encoder based on sensOstep technology និង 86mm flange size bipolar hybrid motor stepper ។
3.2.1 វិមាត្រនៃ PD86-3-1180

3.2.2 លក្ខណៈបច្ចេកទេសនៃម៉ូទ័រ QSH8618-96-55-700

3.2.3 រូបភាពកម្លាំងបង្វិលនៃ QSH8618-96-55-700
តួលេខកម្លាំងបង្វិលជុំរៀបរាប់លម្អិតអំពីលក្ខណៈនៃកម្លាំងបង្វិលជុំសម្រាប់ប្រតិបត្តិការជំហានពេញលេញ ដើម្បីអនុញ្ញាតឱ្យមានការប្រៀបធៀបសាមញ្ញ។ សម្រាប់ដំណើរការពេញមួយជំហាន តែងតែមានចំនុច Resonance ជាច្រើន (ជាមួយនឹងកម្លាំងបង្វិលជុំតិច) ដែលមិនត្រូវបានពិពណ៌នា។ ទាំងនេះនឹងត្រូវបានបង្រួមអប្បបរមាដោយប្រតិបត្តិការ microstep ។

3.3 ឧបករណ៍ភ្ជាប់ TMCM-1180
ឧបករណ៍បញ្ជា / ក្រុមប្រឹក្សាភិបាលនៃ PD86-1180 ផ្តល់ជូននូវឧបករណ៍ភ្ជាប់ចំនួនប្រាំបីរួមទាំងឧបករណ៍ភ្ជាប់ម៉ូទ័រដែលត្រូវបានប្រើនៅខាងក្នុងសម្រាប់ភ្ជាប់ឧបករណ៏ម៉ូទ័រទៅនឹងអេឡិចត្រូនិច។ បន្ថែមពីលើឧបករណ៍ភ្ជាប់ថាមពល មានឧបករណ៍ភ្ជាប់ពីរសម្រាប់ការទំនាក់ទំនងសៀរៀល (មួយសម្រាប់ mini-USB និងមួយសម្រាប់ RS232/RS485/CAN) និងឧបករណ៍ភ្ជាប់ពីរសម្រាប់សញ្ញាបញ្ចូល និងទិន្នផលបន្ថែម។ លើសពីនេះទៀតមានឧបករណ៍ភ្ជាប់មួយសម្រាប់ជំហាន/ទិសដៅ និងមួយទៀតសម្រាប់ឧបករណ៍បំលែងកូដ។ ឧបករណ៍ភ្ជាប់ទិន្នផលផ្តល់នូវលទ្ធផលគោលបំណងទូទៅពីរ ការផ្គត់ផ្គង់ថាមពលមួយវ៉ុលtagអ៊ី ទិន្នផល និងការបញ្ចូលការបិទផ្នែករឹងមួយ។ ការទុកឧបករណ៍បិទបើកឬចងវានឹងដីនឹងបិទកម្មវិធីបញ្ជាម៉ូទ័រtage នៅក្នុងផ្នែករឹង។ សម្រាប់ប្រតិបត្តិការ ធាតុបញ្ចូលនេះគួរតែត្រូវបានចងភ្ជាប់ទៅនឹងវ៉ុលផ្គត់ផ្គង់tagអ៊ី ឧបករណ៍ភ្ជាប់បញ្ចូលផ្តល់នូវធាតុបញ្ចូលពីរសម្រាប់កុងតាក់ឈប់ (ឆ្វេង និងស្តាំ) ការបញ្ចូលកុងតាក់ផ្ទះមួយ ធាតុបញ្ចូលគោលបំណងទូទៅពីរ និងការតភ្ជាប់មួយទៅប្រព័ន្ធ ឬដីសញ្ញា។



ឧបករណ៍ភ្ជាប់ថាមពល ១
ម៉ូឌុលនេះផ្តល់នូវការបញ្ចូលការផ្គត់ផ្គង់ថាមពលដាច់ដោយឡែកសម្រាប់តក្កវិជ្ជាឌីជីថល (pin 2) និងកម្មវិធីបញ្ជា/ថាមពលtage (ម្ជុល 1) ។ ធាតុបញ្ចូលផ្គត់ផ្គង់ទាំងពីរប្រើការតភ្ជាប់ដីទូទៅ (pin 3 និង 4) ។ វិធីនេះការផ្គត់ផ្គង់ថាមពលសម្រាប់អ្នកបើកបរ stage អាចត្រូវបានបិទខណៈពេលដែលនៅតែរក្សាព័ត៌មានទីតាំង និងស្ថានភាព នៅពេលរក្សាការផ្គត់ផ្គង់តក្កវិជ្ជាឌីជីថលសកម្ម។
+UDRIVER ផ្គត់ផ្គង់តែក្នុងករណីដែលការផ្គត់ផ្គង់ថាមពលត្រូវបានផ្តល់ទៅផ្នែកថាមពលតែប៉ុណ្ណោះ ឌីអេដខាងក្នុងនឹងចែកចាយថាមពលទៅផ្នែកតក្កវិជ្ជាផងដែរ។ ដូច្នេះ នៅពេលដែលការផ្គត់ផ្គង់ថាមពលដាច់ដោយឡែកមិនត្រូវបានទាមទារ វាគឺអាចធ្វើទៅបានដោយគ្រាន់តែប្រើ pin 1 និង 4 សម្រាប់ផ្តល់ថាមពលដល់ម៉ូឌុល។

ដើម្បីធានាបាននូវប្រតិបត្តិការដែលអាចទុកចិត្តបាននៃអង្គភាព ការផ្គត់ផ្គង់ថាមពលត្រូវមានកុងទ័រទិន្នផលគ្រប់គ្រាន់ ហើយខ្សែផ្គត់ផ្គង់គួរតែមានភាពធន់ទាប ដូច្នេះប្រតិបត្តិការចង្កឹះមិននាំទៅរកការកើនឡើងនៃការផ្គត់ផ្គង់ថាមពលដោយផ្ទាល់នៅអង្គភាព។ ការផ្គត់ផ្គង់ថាមពល ripple ដោយសារតែប្រតិបត្តិការ chopper គួរតែត្រូវបានរក្សាទុកនៅអតិបរមា 100mV ពីរបី។
ការណែនាំសម្រាប់ការផ្គត់ផ្គង់ថាមពល
- រក្សាខ្សែផ្គត់ផ្គង់ថាមពលឱ្យខ្លីតាមដែលអាចធ្វើទៅបាន។
- ប្រើអង្កត់ផ្ចិតធំសម្រាប់ខ្សែផ្គត់ផ្គង់ថាមពល

3.3.2 ឧបករណ៍ភ្ជាប់ទំនាក់ទំនងសៀរៀល
ឧបករណ៍ភ្ជាប់ 2mm pitch 8 pin ត្រូវបានប្រើសម្រាប់ការទំនាក់ទំនងសៀរៀល។ ជាមួយនឹងឧបករណ៍ភ្ជាប់នេះ ម៉ូឌុលគាំទ្រការទំនាក់ទំនង RS232, RS485 និង CAN ។

ឧបករណ៍ភ្ជាប់យូអេសប៊ី ៨
ឧបករណ៍ភ្ជាប់ mini-USB 5-pin មាននៅលើក្តារ (អាចអាស្រ័យលើជម្រើសដំឡើង)។

3.3.4 ឧបករណ៍ភ្ជាប់ទិន្នផល
ឧបករណ៍ភ្ជាប់ 2mm pitch 4 pin ត្រូវបានប្រើសម្រាប់ភ្ជាប់លទ្ធផលគោលបំណងទូទៅទាំងពីរ និង driver stage បិទផ្នែករឹងបញ្ចូលម្ជុលទៅឯកតា។
ដើម្បីបើកកម្មវិធីបញ្ជាម៉ូទ័រ stage ភ្ជាប់ /Shutdown (pin 2) ទៅ +ULogic (pin 1)!


3.3.5 ឧបករណ៍ភ្ជាប់បញ្ចូល
ឧបករណ៍ភ្ជាប់ 2mm pitch 6 pin ត្រូវបានប្រើសម្រាប់ភ្ជាប់ធាតុបញ្ចូលក្នុងគោលបំណងទូទៅ កុងតាក់ផ្ទះ និងឈប់ទៅឧបករណ៍។
លំនៅដ្ឋានឧបករណ៍ភ្ជាប់មិត្តរួម៖ PHR-6 ទំនាក់ទំនងឧបករណ៍ភ្ជាប់ទំនាក់ទំនង៖ SPH-002T-P0.5S

3.2.5.1 ការផ្លាស់ប្តូរដែនកំណត់ខាងឆ្វេងនិងស្តាំ
TMCM-1180 អាចត្រូវបានកំណត់រចនាសម្ព័ន្ធ ដូច្នេះម៉ូទ័រមានកុងតាក់កំណត់ខាងឆ្វេង និងស្តាំ (រូបភាព 4.9)។
ម៉ូទ័រឈប់នៅពេលអ្នកធ្វើដំណើរបានទៅដល់កុងតាក់ដែនកំណត់មួយ។

3.2.5.2 ការកំណត់រចនាសម្ព័ន្ធប្ដូរបីដង
វាអាចធ្វើទៅបានដើម្បីរៀបចំជួរភាពអត់ធ្មត់ជុំវិញទីតាំងប្តូរសេចក្តីយោង។ វាមានប្រយោជន៍សម្រាប់ការកំណត់រចនាសម្ព័ន្ធកុងតាក់បីដង ដូចដែលបានរៀបរាប់ក្នុងរូបភាព 4.10 ។ នៅក្នុងការកំណត់រចនាសម្ព័ន្ធនោះ កុងតាក់ពីរត្រូវបានប្រើជាកុងតាក់ឈប់ដោយស្វ័យប្រវត្តិ ហើយកុងតាក់បន្ថែមមួយត្រូវបានប្រើជាកុងតាក់យោងរវាងកុងតាក់ឈប់ខាងឆ្វេង និងកុងតាក់ឈប់ខាងស្តាំ។ កុងតាក់ឈប់ខាងឆ្វេង និងកុងតាក់យោងត្រូវបានភ្ជាប់ជាមួយខ្សែ។ កុងតាក់កណ្តាល (កុងតាក់ធ្វើដំណើរ) អនុញ្ញាតឱ្យមានការត្រួតពិនិត្យអ័ក្សដើម្បីរកមើលការបាត់បង់ជំហាន។

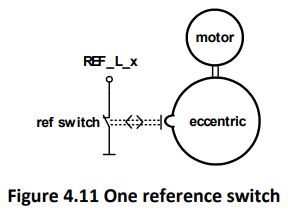
3.2.5.3 One Limit Switch សម្រាប់ប្រព័ន្ធរាងជារង្វង់
ប្រសិនបើប្រព័ន្ធរាងជារង្វង់ត្រូវបានប្រើប្រាស់ (រូបភាព 4.11) មានតែកុងតាក់យោងមួយប៉ុណ្ណោះដែលចាំបាច់ ព្រោះមិនមានចំណុចបញ្ចប់នៅក្នុងប្រព័ន្ធបែបនេះទេ។
3.3.6 ឧបករណ៍ភ្ជាប់ជំហាន/ទិសដៅ
ឧបករណ៍ភ្ជាប់ 2mm pitch 4 pin ត្រូវបានប្រើសម្រាប់ភ្ជាប់ចំណុចប្រទាក់ Step/Dir ។

3.3.7 ឧបករណ៍ភ្ជាប់អ៊ិនកូដឌ័រ
ឧបករណ៍ភ្ជាប់ 2mm pitch 5 pin ត្រូវបានប្រើសម្រាប់ភ្ជាប់ឧបករណ៍បំលែងកូដ។
លំនៅដ្ឋានឧបករណ៍ភ្ជាប់មិត្តរួម៖ PHR-5 ទំនាក់ទំនងឧបករណ៍ភ្ជាប់ទំនាក់ទំនង៖ SPH-002T-P0.5S

3.3.8 ឧបករណ៍ភ្ជាប់ម៉ូទ័រ និងការបញ្ជាក់
ឧបករណ៍ភ្ជាប់ 3.96mm pitch 4 pin ត្រូវបានប្រើសម្រាប់ការភ្ជាប់ម៉ូទ័រ។ របុំរបុំរបុំទាំងពីរ (ម៉ូទ័រ bipolar stepper) ត្រូវបានភ្ជាប់ទៅឧបករណ៍ភ្ជាប់នេះ។
លំនៅដ្ឋានឧបករណ៍ភ្ជាប់មិត្តរួម៖ VHR-4N ទំនាក់ទំនងឧបករណ៍ភ្ជាប់មិត្តរួម៖ BVH-21T-P1.1

4 អ្នកលោត
ការកំណត់ភាគច្រើននៃក្តារត្រូវបានធ្វើតាមរយៈកម្មវិធី។ ទោះជាយ៉ាងណាក៏ដោយ jumpers មួយចំនួនអាចរកបានសម្រាប់ការកំណត់រចនាសម្ព័ន្ធ។

4.1 ការឈប់ឡានក្រុង RS485
ក្រុមប្រឹក្សាភិបាលរួមបញ្ចូលទាំងរេស៊ីស្តង់ 120 Ohm សម្រាប់ការបញ្ចប់រថយន្តក្រុងត្រឹមត្រូវនៃចំណុចប្រទាក់ RS485 ។ នៅពេលដែល jumper នេះត្រូវបានបិទ រេស៊ីស្តង់នឹងត្រូវបានដាក់នៅចន្លោះខ្សែឡានក្រុងឌីផេរ៉ង់ស្យែលពីរ RS485+ និង RS485-។
4.2 អាចការបិទឡានក្រុង
ក្រុមប្រឹក្សាភិបាលរួមបញ្ចូលទាំងរេស៊ីស្តង់ 120 Ohm សម្រាប់ការបញ្ចប់រថយន្តក្រុងត្រឹមត្រូវនៃចំណុចប្រទាក់ CAN ។ នៅពេលដែល jumper នេះត្រូវបានបិទ រេស៊ីស្តង់នឹងត្រូវបានដាក់នៅចន្លោះខ្សែឡានក្រុងឌីផេរ៉ង់ស្យែលពីរ CAN_H និង CAN_L ។
5 ការវាយតម្លៃប្រតិបត្តិការ
ការវាយតម្លៃប្រតិបត្តិការដែលបានបង្ហាញខាងក្រោមគួរតែត្រូវបានប្រើជាតម្លៃនៃការរចនា។ ក្នុងករណីណាក៏ដោយតម្លៃអតិបរមាមិនគួរលើសពីកំឡុងពេលប្រតិបត្តិការទេ។

*) គ្រឿងអេឡិចត្រូនិចរបស់កម្មវិធីបញ្ជាត្រូវបានសាកល្បងនៅខាងក្នុងបន្ទប់អាកាសធាតុដែលដំណើរការនៅចរន្តពេញ (5.5A RMS) សម្រាប់រយៈពេល 30 នាទីដោយមិនមានខ្យល់ convection នៅសីតុណ្ហភាព 50°C។
ម៉ូទ័រអាចឡើងកំដៅបានល្អលើសពី 50°C នៅពេលដំណើរការនៅចរន្តពេញដោយមិនមានការត្រជាក់ត្រឹមត្រូវ។ នេះអាចបង្កើនសីតុណ្ហភាពបរិស្ថានសម្រាប់គ្រឿងអេឡិចត្រូនិក។ នៅពេលប្រើរបៀបប្រតិបត្តិការ coolStep ចរន្តពិតប្រាកដអាចតិចជាងយ៉ាងខ្លាំងដែលបានកំណត់កម្មវិធី។ ផលិតកម្មនិងសីតុណ្ហភាពបច្ចុប្បន្ន។
6 ការពិពណ៌នាមុខងារ
នៅក្នុងរូបភាព 7.1 ផ្នែកសំខាន់ៗនៃ PD86-1180 ត្រូវបានបង្ហាញ។ PANDrive ភាគច្រើនមាន µC (ភ្ជាប់ទៅអង្គចងចាំ EEPROM TMCL) ឧបករណ៍បញ្ជាចលនា TMC428/429 កម្មវិធីបញ្ជាថាមពល TMC262A-PC ជាមួយនឹងមុខងារ coolStep ដែលមានប្រសិទ្ធភាពថាមពល អ្នកបើកបរ MOSFET ខាងក្រៅ stage, ម៉ូទ័រ stepper QSH8618 និងឧបករណ៍បំប្លែង sensOstep រួមបញ្ចូលគ្នា។ ម៉្យាងទៀតវាអាចធ្វើទៅបានដើម្បីភ្ជាប់ឧបករណ៍បំលែងកូដខាងក្រៅ។ វ៉ុលផ្គត់ផ្គង់នាមករណ៍tages គឺ 24VDC ឬ 48VDC។

៤ ស្ថាបត្យកម្មប្រព័ន្ធ
TMCM-1180 រួមបញ្ចូល microcontroller ជាមួយប្រព័ន្ធប្រតិបត្តិការ TMCL (Trinamic Motion Control Language)។ ភារកិច្ចគ្រប់គ្រងចលនាតាមពេលវេលាជាក់ស្តែងត្រូវបានសម្រេចដោយ TMC428/429។
ឧបករណ៍បញ្ជាខ្នាតតូច ១ គ្រឿង
នៅលើម៉ូឌុលនេះ Atmel AT91SAM7X256 ត្រូវបានប្រើដើម្បីដំណើរការប្រព័ន្ធប្រតិបត្តិការ TMCL និងដើម្បីគ្រប់គ្រង TMC428/429 ។ ស៊ីភីយូមានអង្គចងចាំពន្លឺ 256KB និង RAM 64KB ។ microcontroller ដំណើរការប្រព័ន្ធប្រតិបត្តិការ TMCL (Trinamic Motion Control Language) ដែលធ្វើឱ្យវាអាចប្រតិបត្តិពាក្យបញ្ជា TMCL ដែលត្រូវបានបញ្ជូនទៅម៉ូឌុលពីម៉ាស៊ីនតាមរយៈ RS232, RS485, USB, ឬ CAN interface។ microcontroller បកស្រាយពាក្យបញ្ជា TMCL និងគ្រប់គ្រង TMC428/429 ដែលប្រតិបត្តិពាក្យបញ្ជាចលនា។ លើសពីនេះទៀតវាត្រូវបានភ្ជាប់ជាមួយចំណុចប្រទាក់អ៊ិនកូដឌ័រហើយដំណើរការធាតុបញ្ចូល។ flash ROM របស់ microcontroller ផ្ទុកប្រព័ន្ធប្រតិបត្តិការ TMCL ។ ប្រព័ន្ធប្រតិបត្តិការ TMCL អាចត្រូវបានធ្វើបច្ចុប្បន្នភាពតាមរយៈចំណុចប្រទាក់ RS232 ឬតាមរយៈចំណុចប្រទាក់ CAN ។ ប្រើ TMCL-IDE ដើម្បីធ្វើដូច្នេះ។
6.1.2 EEPROM
ដើម្បីរក្សាទុកកម្មវិធី TMCL សម្រាប់ប្រតិបត្តិការតែម្នាក់ឯង ម៉ូឌុល TMCM-1180 ត្រូវបានបំពាក់ដោយ EEPROM ទំហំ 16kByte ភ្ជាប់ជាមួយ microcontroller ។ EEPROM អាចផ្ទុកកម្មវិធី TMCL ដែលមានពាក្យបញ្ជា TMCL រហូតដល់ 2048 ។ EEPROM ក៏ត្រូវបានប្រើដើម្បីរក្សាទុកទិន្នន័យកំណត់រចនាសម្ព័ន្ធផងដែរ។
6.1.3 ឧបករណ៍បញ្ជាចលនា
TMC428/429 គឺជា IC ត្រួតពិនិត្យម៉ូទ័រ stepper ដំណើរការខ្ពស់ ហើយអាចគ្រប់គ្រងបានរហូតដល់ទៅ 2-phase-stepper-motors ។ ប៉ារ៉ាម៉ែត្រចលនាដូចជាល្បឿន ឬការបង្កើនល្បឿនត្រូវបានបញ្ជូនទៅ TMC428/429 តាមរយៈ SPI ដោយ microcontroller ។ ការគណនា ramps និង speed profiles ត្រូវបានធ្វើនៅខាងក្នុងដោយផ្នែករឹងដោយផ្អែកលើប៉ារ៉ាម៉ែត្រចលនាគោលដៅ។
6.1.4 កម្មវិធីបញ្ជាម៉ូទ័រ Stepper
TMC262A-PC គឺជា IC កម្មវិធីបញ្ជា microstepping ភាពជាក់លាក់ខ្ពស់នាពេលបច្ចុប្បន្នដែលមានប្រសិទ្ធភាពថាមពលសម្រាប់ម៉ូទ័រ bipolar stepper ។ កម្មវិធីបញ្ជានេះនៅលើម៉ូឌុល TMCM-1180 គឺជាកំណែពិសេសនៃកម្មវិធីបញ្ជាថាមពល TMC262 សម្រាប់ PANDrives ជាមួយនឹងម៉ូទ័រ QSH8618 ។
ការរកឃើញការផ្ទុក sensorless គុណភាពបង្ហាញខ្ពស់តែមួយគត់របស់វា stallGuard2 ត្រូវបានប្រើសម្រាប់មុខងារត្រួតពិនិត្យបច្ចុប្បន្នដែលពឹងផ្អែកលើបន្ទុករួមបញ្ចូលគ្នាពិសេសហៅថា coolStep ។ សមត្ថភាពក្នុងការអានបន្ទុកនិងរកឃើញការផ្ទុកលើសទម្ងន់ធ្វើឱ្យ TMC262 ជាជម្រើសដ៏ល្អបំផុតសម្រាប់ដ្រាយដែលចង់បានភាពជឿជាក់ខ្ពស់។ TMC262 អាចត្រូវបានជំរុញដោយសញ្ញាជំហាន/ទិសដៅ ក៏ដូចជាដោយ SPITM សៀរៀល។

និយតករចរន្ត coolStep អនុញ្ញាតឱ្យគ្រប់គ្រងប្រតិកម្មរបស់អ្នកបើកបរក្នុងការបង្កើនឬបន្ថយបន្ទុក។ និយតករខាងក្នុងប្រើកម្រិតពីរដើម្បីកំណត់អប្បបរមា និងមុំផ្ទុកអតិបរមាសម្រាប់ប្រតិបត្តិការម៉ូទ័រល្អបំផុត។ ល្បឿនបង្កើនបច្ចុប្បន្ន និងល្បឿនបន្ថយបច្ចុប្បន្នអាចត្រូវបានសម្របតាមកម្មវិធី។ លើសពីនេះ ដែនកំណត់ចរន្តទាបអាចត្រូវបានកំណត់ទាក់ទងនឹងដែនកំណត់ចរន្តខាងលើដែលកំណត់ដោយប៉ារ៉ាម៉ែត្រមាត្រដ្ឋានបច្ចុប្បន្ន CS ។
6.1.5 sensOstep Encoder
ឧបករណ៍បំលែងកូដ sensOstep ដែលប្រើក្នុងឯកតានេះគឺផ្អែកលើប្រព័ន្ធបំប្លែងទីតាំងមុំម៉ាញេទិកជាមួយនឹងគុណភាពបង្ហាញទាប។ វាមានមេដែកតូចមួយដែលដាក់នៅចុងខាងក្រោយនៃអ័ក្សម៉ូទ័រ stepper និង Hall-sensor IC ជាមួយនឹងដំណើរការសញ្ញាឌីជីថលរួមបញ្ចូលគ្នា (ឧ. សម្រាប់ការគ្រប់គ្រងការឡើងដោយស្វ័យប្រវត្តិ សំណងសីតុណ្ហភាព។ល។) ដាក់នៅពីលើមេដែកនៅផ្នែកខាងក្រោយនៃម៉ូទ័រ។ បន្ទះសៀគ្វីដែលបានបោះពុម្ព។ ឧបករណ៍បំលែងកូដផ្តល់នូវដំណោះស្រាយ 8 ប៊ីត (256 ជំហាន) ក្នុងមួយបដិវត្តន៍ ដែលគ្រប់គ្រាន់ទាំងស្រុងសម្រាប់ការរកឃើញការបាត់បង់ជំហានជាមួយនឹងម៉ូទ័រ stepper ស្តង់ដារ 1.8 °។
7 TMCM-1180 ការពិពណ៌នាអំពីប្រតិបត្តិការ
7.1 ការគណនា៖ ល្បឿន និងការបង្កើនល្បឿនធៀបនឹងប្រេកង់ Microstep និង Fullstep
តម្លៃនៃប៉ារ៉ាម៉ែត្រដែលបានផ្ញើទៅ TMC428/429 មិនមានតម្លៃម៉ូទ័រធម្មតាដូចជាការបង្វិលក្នុងមួយវិនាទីជាល្បឿន។ ប៉ុន្តែតម្លៃទាំងនេះអាចត្រូវបានគណនាពីប៉ារ៉ាម៉ែត្រ TMC428/429 ដូចដែលបានបង្ហាញនៅក្នុងផ្នែកនេះ។


8 TMCL
TMCL ដែលជាភាសាគ្រប់គ្រងចលនា TRINAMIC ត្រូវបានពិពណ៌នានៅក្នុងឯកសារដាច់ដោយឡែក ដែលសំដៅទៅលើផលិតផលជាក់លាក់ (ឧទាហរណ៍ TMCM-1180 TMCL Firmware Manual)។ សៀវភៅណែនាំត្រូវបានផ្តល់ជូននៅលើគេហទំព័រ www.tinamic.com ។ សូមយោងទៅប្រភពទាំងនេះសម្រាប់សន្លឹកទិន្នន័យដែលបានធ្វើបច្ចុប្បន្នភាព និងកំណត់ចំណាំកម្មវិធី។
9 CANOpen
ម៉ូឌុល TMCM-1180 ក៏គួរតែត្រូវបានប្រើជាមួយពិធីការ CANopen នៅក្នុងកំណែនាពេលអនាគតផងដែរ។ ចំពោះគោលបំណងនេះ កម្មវិធីបង្កប់ពិសេស CANopen កំពុងស្ថិតក្រោមការអភិវឌ្ឍន៍។ សូមទាក់ទង TRINAMIC ប្រសិនបើអ្នកចាប់អារម្មណ៍លើជម្រើសនេះ។
10 គោលនយោបាយគាំពារជីវិត
TRINAMIC Motion Control GmbH & Co. KG មិនអនុញ្ញាត ឬធានាណាមួយនៃផលិតផលរបស់ខ្លួនសម្រាប់ប្រើប្រាស់ក្នុងប្រព័ន្ធទ្រទ្រង់ជីវិត ដោយគ្មានការយល់ព្រមជាលាយលក្ខណ៍អក្សរជាក់លាក់ពី TRINAMIC Motion Control GmbH & Co. KG ឡើយ។
ប្រព័ន្ធទ្រទ្រង់ជីវិត គឺជាឧបករណ៍ដែលមានបំណងទ្រទ្រង់ ឬទ្រទ្រង់ជីវិត ហើយការបរាជ័យក្នុងការអនុវត្ត នៅពេលដែលប្រើប្រាស់បានត្រឹមត្រូវតាមការណែនាំដែលបានផ្តល់ឱ្យ អាចត្រូវបានគេរំពឹងថានឹងបណ្តាលឱ្យមានរបួស ឬស្លាប់ផ្ទាល់ខ្លួន។
© TRINAMIC Motion Control GmbH & Co. KG 2013 ព័ត៌មានដែលបានផ្តល់ឱ្យក្នុងសន្លឹកទិន្នន័យនេះត្រូវបានគេជឿថាមានភាពត្រឹមត្រូវ និងអាចទុកចិត្តបាន។ ទោះបីជាយ៉ាងណាក៏ដោយ ទាំងការទទួលខុសត្រូវមិនត្រូវបានសន្មត់សម្រាប់ផលវិបាកនៃការប្រើប្រាស់របស់វា ឬសម្រាប់ការរំលោភលើប៉ាតង់ ឬសិទ្ធិផ្សេងទៀតរបស់ភាគីទីបី ដែលអាចបណ្តាលមកពីការប្រើប្រាស់របស់វា។ លក្ខណៈបច្ចេកទេសអាចផ្លាស់ប្តូរដោយគ្មានការជូនដំណឹង ពាណិជ្ជសញ្ញាទាំងអស់ដែលបានប្រើគឺជាកម្មសិទ្ធិរបស់ម្ចាស់រៀងៗខ្លួន។

11 ប្រវត្តិកែប្រែ
11.1 ការកែប្រែផ្នែករឹង

11.2 ការកែប្រែផ្នែករឹង

12 ឯកសារយោង
[TMCM-1180 / PD86-1180 TMCL] TMCM-1180 និង PD86-1180 TMCL សៀវភៅណែនាំកម្មវិធីបង្កប់[TMCL-IDE] សៀវភៅណែនាំអ្នកប្រើប្រាស់ TMCL-IDE
[QSH8618] QSH8618 សៀវភៅណែនាំ
សូមយោងទៅ www.tinamic.com.
ឯកសារ/ធនធាន
 |
ឧបករណ៍បញ្ជាម៉ូទ័រ Stepper TRINAMIC TMCM-1180 [pdf] ការណែនាំអ្នកប្រើប្រាស់ TMCM-1180 Stepper Motor Controller, TMCM-1180, Stepper Motor Controller, Motor Controller, ឧបករណ៍បញ្ជា |