![]() TPD4204F DC 300V បញ្ចូល BLDC Motor Sensorless សៀគ្វីត្រួតពិនិត្យ
TPD4204F DC 300V បញ្ចូល BLDC Motor Sensorless សៀគ្វីត្រួតពិនិត្យ
ការណែនាំអ្នកប្រើប្រាស់
សេចក្តីផ្តើម
មគ្គុទ្ទេសក៍យោងនេះ (បន្តហៅថា "មគ្គុទ្ទេសក៍នេះ") ពន្យល់ពីលក្ខណៈបច្ចេកទេស និងជំហាននៃប្រតិបត្តិការនៃសៀគ្វី DC 300 V Input BLDC Motor Sensorless Control Circuit (តទៅនេះហៅថា "ការរចនាសេចក្តីយោងនេះ")។
កង្ហារនៃម៉ាស៊ីនត្រជាក់ក្នុងផ្ទះ ដំណើរការដោយម៉ូទ័រគ្មានជក់ ជាទូទៅត្រូវបានជំរុញនៅកម្រិត DC 300 V ។ កាលពីមុន ម៉ូទ័រត្រូវបានជំរុញជាចម្បងដោយការបង្កើនថាមពលរលកការ៉េដោយប្រើឧបករណ៍ចាប់សញ្ញា Hall ជាដើម។ ប៉ុន្តែក្នុងប៉ុន្មានឆ្នាំថ្មីៗនេះ ដើម្បីឆ្លើយតបទៅនឹងតម្រូវការសម្រាប់តម្លៃប្រព័ន្ធទាប ប្រសិទ្ធភាពខ្ពស់ និងម៉ូទ័រស្ងាត់ជាងមុន ម៉ូទ័រត្រូវបានជំរុញដោយថាមពល sinusoidal ដោយមិនចាំបាច់ប្រើ។ ឧបករណ៍ចាប់សញ្ញា Hall និងជាមួយការត្រួតពិនិត្យវ៉ិចទ័រ។
នៅក្នុងការរចនាឯកសារយោងនេះ ឧបករណ៍បញ្ជា microcontroller TMPM374FWUG ត្រូវបានប្រើសម្រាប់ការគ្រប់គ្រងម៉ូទ័រ និងសម្រាប់ការអនុវត្តការគ្រប់គ្រងវ៉ិចទ័រដែលគ្មានឧបករណ៍ចាប់សញ្ញា។
ឧបករណ៍ថាមពលឆ្លាតវៃដែលមានកុងតាក់សម្រាប់អាំងវឺតទ័របីដំណាក់កាល និងកម្មវិធីបញ្ជាច្រកទ្វារក្នុងកញ្ចប់តូចត្រូវបានប្រើសម្រាប់ការបើកបរម៉ូទ័រ។ ការរចនាយោងនេះ (RD180- 3) ប្រើ TPD4204F (ប្រភេទដែលភ្ជាប់មកជាមួយ MOSFET ធន់នឹងវ៉ុលtage នៃ 600 V, ចរន្តទិន្នផលអតិបរមានៃ 2.5 A និងកញ្ចប់ SSOP30) ។ ឧបករណ៍នេះជួយក្នុងការសម្រេចបាននូវដ្រាយម៉ូទ័រដែលមានប្រសិទ្ធភាពខ្ពស់ជាមួយនឹងផ្ទៃម៉ោនបន្ទះតូច។
លក្ខណៈបច្ចេកទេស
តារាង 2.1 រាយបញ្ជីលក្ខណៈសំខាន់ៗនៃការរចនាឯកសារយោងនេះ។
តារាង 2.1 DC 300 V Input BLDC Motor Sensorless Control Circuit Specifications
| ធាតុ | លក្ខណៈបច្ចេកទេស |
| ការបញ្ចូលថាមពលម៉ូទ័រ | DC 120 V ទៅ 340 V |
| គ្រប់គ្រងការបញ្ចូលថាមពល | DC 15 V, DC 5 V |
| ម៉ូទ័រជំរុញបច្ចុប្បន្នអតិបរមា (ក្នុងមួយដំណាក់កាល) | 2.5 អេ |
| ប្រព័ន្ធដ្រាយម៉ូទ័រ | ការត្រួតពិនិត្យវ៉ិចទ័រដោយគ្មានឧបករណ៍ចាប់សញ្ញា (ការគ្រប់គ្រងល្បឿន) |
| ការផ្លាស់ប្តូរប្រេកង់ | 15.625 kHz (អាចផ្លាស់ប្តូរបានដោយកម្មវិធី) |
| MC() វិធីសាស្ត្រត្រួតពិនិត្យ | ការត្រួតពិនិត្យ MCU តែមួយ ឬការត្រួតពិនិត្យ MCU ខាងក្រៅ |
| ប្រព័ន្ធត្រជាក់ | ខ្យល់ត្រជាក់ធម្មជាតិ |
| មុខងារការពារ | Overcurrent នៃ Motor Power Input (10 A ដោយ Fuse) ចរន្តលើសនៃទិន្នផលម៉ូទ័រ (ប្រហែល 2.9A ដំណាក់កាលនីមួយៗ) |
| ទំហំក្តារ (រួមទាំងផ្នែកក្តារគ្រឿងបន្លាស់) |
130 x 85 x 53.4 ម។ |
| ចំណុចប្រទាក់ I/O (បានដំឡើងនៅលើក្តារបន្ថែម) |
LED ពណ៌ក្រហមសម្រាប់បង្ហាញស្ថានភាព x 3 កុងតាក់ DIP សម្រាប់ការកំណត់ស្ថានភាព x 4 Potentiometer សម្រាប់ការកំណត់ល្បឿន x 1 SWD បញ្ចូល/លទ្ធផល x 1 |
២.១. ដ្យាក្រាមប្លុកសៀគ្វី
រូប 2.1 បង្ហាញដ្យាក្រាមប្លុកនៃការរចនាយោងនេះ។

រូប 2.1 DC 300 V បញ្ចូល BLDC Motor Sensorless Control Circuit Diagram
2.2. ខាងក្រៅ View និងប្លង់សមាសភាគ
រូប 2.2 និងរូបទី 2.3 បង្ហាញពីរូបរាងខាងក្រៅនៃការរចនាយោងនេះ ហើយរូប 2.4 បង្ហាញពីប្លង់នៃធាតុផ្សំសំខាន់ៗ។
 រូប 2.2 DC 300 V បញ្ចូល BLDC Motor Sensorless Control Circuit Board Front View (សម្រាប់ RD179-3)
រូប 2.2 DC 300 V បញ្ចូល BLDC Motor Sensorless Control Circuit Board Front View (សម្រាប់ RD179-3)

រូបភព។ 2.3 DC 300 V បញ្ចូល BLDC Motor Sensorless Control Circuit ខាងក្រៅ view នៃ PCB (សម្រាប់ RD179-3)

ដ្យាក្រាមសៀគ្វី វិក័យប័ត្រសម្ភារៈ និងដ្យាក្រាមគំរូ PCB
៤.១. ដ្យាក្រាមសៀគ្វី
យោងទៅខាងក្រោម file:
RD179-3 (បំពាក់ជាមួយ TPD4204F)៖ RD179-SCHEMATIC3-xx.pdf (xx គឺជាលេខកែប្រែ)
២.១. បញ្ជីសមាសធាតុ
យោងទៅខាងក្រោម file:
RD179-3 (បំពាក់ជាមួយ TPD4204F): RD179-BOM3-xx.pdf (xx គឺជាលេខកែប្រែ)
៣.៣. ដ្យាក្រាមគំរូ PCB
រូប 3.1 បង្ហាញដ្យាក្រាមគំរូ PCB នៃការរចនាឯកសារយោងនេះ។
ផងដែរ យោងទៅខាងក្រោម file:
RD179-3 (បំពាក់ជាមួយ TPD4204F): RD179-LAYER3-xx.pdf (xx គឺជាលេខកែប្រែ)

ការពិពណ៌នាអំពីប្រតិបត្តិការសៀគ្វី
៤.១. ឈ្មោះនិងមុខងារនៃសមាសធាតុ
៤.១.១. វិធីសាស្ត្រ Shunt កំណត់ Solder Jumper (SJP4.1.1, SJP1, SJP2, SJP3)
ដើម្បីប្តូរវិធីសាស្ត្ររាវរកបច្ចុប្បន្ន សូមកំណត់ឧបករណ៍លោតចំនួនបួនដូចដែលបានពិពណ៌នាខាងក្រោម។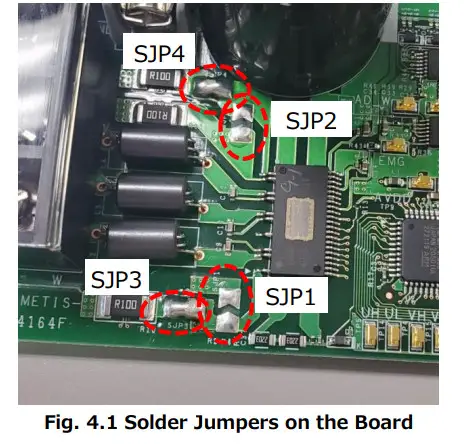
តារាង 4.1 ការកំណត់ Solder Jumper
| ប្រព័ន្ធរកឃើញបច្ចុប្បន្ន | SJP1 | SJP2 | SJP3 | SJP4 |
| ប្រព័ន្ធ 3-shunt | បើក | បើក | ខ្លី | ខ្លី |
| ប្រព័ន្ធ 1-shunt | ខ្លី | ខ្លី | បើក | បើក |
៤.១.២. ឧបករណ៍ភ្ជាប់ថាមពលម៉ូទ័រ (J4.1.2)
ប្រើសម្រាប់បញ្ចូលថាមពល DC ដើម្បីជំរុញម៉ូទ័រ។
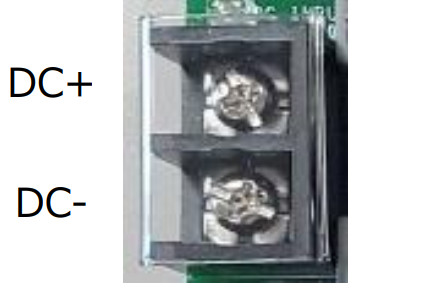 រូបភាព 4.2 ឧបករណ៍ភ្ជាប់ថាមពលម៉ូទ័រនៅលើក្តារ (J1)
រូបភាព 4.2 ឧបករណ៍ភ្ជាប់ថាមពលម៉ូទ័រនៅលើក្តារ (J1)
៤.១.៣. ឧបករណ៍ភ្ជាប់ម៉ូទ័រ (J4.1.3)
ប្រើសម្រាប់ភ្ជាប់ម៉ូទ័រ BLDC 3 ដំណាក់កាល។
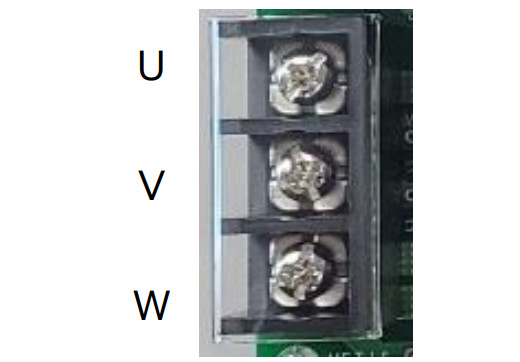 រូបភាព 4.3 ឧបករណ៍ភ្ជាប់ម៉ូទ័រនៅលើក្តារ (J2)
រូបភាព 4.3 ឧបករណ៍ភ្ជាប់ម៉ូទ័រនៅលើក្តារ (J2)
៤.១.៤. គ្រប់គ្រងឧបករណ៍ភ្ជាប់បញ្ចូលថាមពល (J4.1.4, J3)
ប្រើសម្រាប់ផ្គត់ផ្គង់ថាមពលបញ្ចូលសម្រាប់ការគ្រប់គ្រង។ ឧបករណ៍ភ្ជាប់គឺជាឧបករណ៍ភ្ជាប់ប្រភេទ Jack (ប៉ូលវិជ្ជមានខាងក្នុង) ដូច្នេះវាអាចត្រូវបានផ្គត់ផ្គង់ដោយប្រើអាដាប់ទ័រ AC ។ល។ J3 គឺសម្រាប់បញ្ចូល 15 V ហើយត្រូវបានប្រើដើម្បីដំណើរការឧបករណ៍ថាមពលឆ្លាតវៃ (TPD4204F) ហើយ J10 គឺសម្រាប់បញ្ចូល 5 V ហើយត្រូវបានប្រើជាការផ្គត់ផ្គង់ថាមពលសម្រាប់ MCU, IC គ្រឿងកុំព្យូទ័រ។ល។ ដោយសារឧបករណ៍ភ្ជាប់ទាំងពីរមានប្រភេទដូចគ្នា សូមប្រយ័ត្នកុំភ្ជាប់ពួកវាមិនត្រឹមត្រូវ។
 រូបភាព 4.4 ត្រួតពិនិត្យឧបករណ៍ភ្ជាប់ថាមពលបញ្ចូល (J3, J10) នៅលើក្តារ
រូបភាព 4.4 ត្រួតពិនិត្យឧបករណ៍ភ្ជាប់ថាមពលបញ្ចូល (J3, J10) នៅលើក្តារ
៤.១.៥. កុងតាក់ និង LEDs (S_SW4.1.5~1, LED4~1, LEDP3~1)
កុងតាក់ និង LEDs ដំណើរការដូចខាងក្រោម។
S_SW1, S_SW2, S_SW3, S_SW4, LED1, LED2, និង LED3 ត្រូវបានភ្ជាប់ទៅម្ជុល GPIO នៃ MCU ហើយត្រូវបានគ្រប់គ្រងដោយកម្មវិធី។
 រូបភាព 4.5 កុងតាក់ និង LEDs នៅលើក្តារ
រូបភាព 4.5 កុងតាក់ និង LEDs នៅលើក្តារ
តារាង 4.2 កុងតាក់ និងលក្ខណៈបច្ចេកទេស LED
| សមាសភាគ | មុខងារ | ចំណាំ |
| អេស SW1 | (មិនប្រើ) | |
| អេស SW2 | វិធីសាស្រ្តត្រួតពិនិត្យ MCU | បើក៖ ការគ្រប់គ្រង MCU ខាងក្រៅ បិទការគ្រប់គ្រង MCU តែមួយ (វាគួរតែត្រូវបានកំណត់ទៅបិទនៅក្នុងការរចនាយោងនេះ។) |
| អេស SW3 | ទិសដៅបង្វិលម៉ូទ័រ | បើក៖ CW (ទ្រនិចនាឡិកា) បិទ៖ CCW (ច្រាសទ្រនិចនាឡិកា) |
| អេស SW4 | (មិនបានប្រើ) | |
| LED1 ។ | សូចនាករកំហុស | ទេ កំហុស៖ បិទ កំហុស៖ បើក ឬព្រិចភ្នែក |
| LED2 ។ | សូចនាករម៉ាស៊ីនវ៉ិចទ័រ | VE រំខានកំពុងដំណើរការ៖ បើក |
| LED3 ។ | សូចនាករទំនាក់ទំនង | ការទំនាក់ទំនង៖ បើក ការប្រាស្រ័យទាក់ទងបានបញ្ឈប់ដោយសារតែកំហុស៖ ព្រិចភ្នែករៀងរាល់ 0.5 វិនាទី |
| LEDP1 | សូចនាករថាមពលម៉ូទ័របើក | នៅពេលថាមពលម៉ូទ័របើក៖ បើក (ពណ៌លឿង) LEDP1 ក៏បើកផងដែរ ខណៈពេលដែល capacitor ត្រូវបានសាក។ ប្រយ័ត្នកុំឱ្យប៉ះក្តារខៀនពេលវាបើក។ |
| LEDP2 | ត្រួតពិនិត្យថាមពល សូចនាករថាមពលផ្គត់ផ្គង់ |
ថាមពលគ្រប់គ្រង (5V) energized: បើក (បៃតង) |
៤.១.៦. ឧបករណ៍វាស់ស្ទង់ថាមពល (VR4.1.6)
potentiometer អាចត្រូវបានប្រើដើម្បីកំណត់ល្បឿនរបស់ម៉ូទ័រ (cHZ_MIN ទៅ 60 Hz range)។
 រូបភាព ៤.៦ ឧបករណ៍វាស់ស្ទង់ថាមពលនៅលើក្តារ (VR4.6)
រូបភាព ៤.៦ ឧបករណ៍វាស់ស្ទង់ថាមពលនៅលើក្តារ (VR4.6)
ការបង្វិលមុំអគ្គិសនី
 រូបភាព 4.7 ទំនាក់ទំនងរវាងតម្លៃកំណត់ potentiometer និងល្បឿនបង្វិល
រូបភាព 4.7 ទំនាក់ទំនងរវាងតម្លៃកំណត់ potentiometer និងល្បឿនបង្វិល
៤.១.៧. ឧបករណ៍ភ្ជាប់ MCU ខាងក្រៅ (J4.1.7)
ឧបករណ៍ភ្ជាប់សម្រាប់ភ្ជាប់ទៅខាងក្រៅ (ម៉ាស៊ីន) MCU ។ មិនត្រូវបានប្រើក្នុងការរចនាឯកសារយោងនេះទេ។
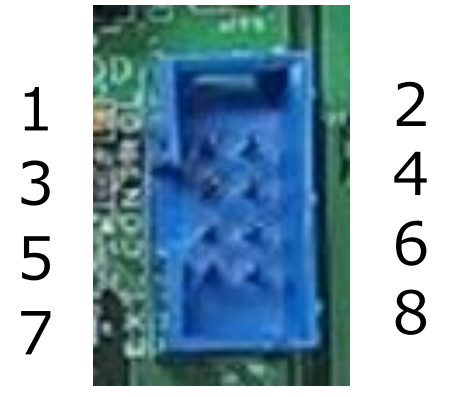 រូបភាព 4.8 ឧបករណ៍ភ្ជាប់ MCU ខាងក្រៅ (J7)
រូបភាព 4.8 ឧបករណ៍ភ្ជាប់ MCU ខាងក្រៅ (J7)
តារាង 4.3 លក្ខណៈបច្ចេកទេសឧបករណ៍ភ្ជាប់ MCU ខាងក្រៅ
| ម្ជុល | មុខងារ | ចំណាំ | |
| 1 | ឌីវីឌីឌី | ការផ្គត់ផ្គង់ថាមពលឌីជីថល (5V) | |
| 2 | DVS | ការផ្គត់ផ្គង់ថាមពលឌីជីថល (GND) | |
| 3 | UART RX | ទទួលភ្ញៀវ UART | |
| 4 | UART_TX | ការបញ្ជូន UART | |
| 5 | ការតភ្ជាប់ GPIO | កក់ទុក (មិនប្រើ) | ដូចគ្នានឹង S SW1 |
| 6 | ការតភ្ជាប់ GPIO | របៀបគ្រប់គ្រង | ដូចគ្នានឹង S SW2 |
| 7 | កំណត់ឡើងវិញ# | កំណត់ធាតុបញ្ចូលឡើងវិញ | កំណត់ MCU ឡើងវិញ |
| 8 | ការតភ្ជាប់ GPIO | កក់ទុក (មិនប្រើ) | ការតភ្ជាប់ GPIO |
៤.១.៨. ឧបករណ៍ភ្ជាប់ DAC ខាងក្រៅ (J4.1.8)
ទិន្នន័យដែលត្រូវដំណើរការនៅខាងក្នុង MCU គឺចេញជាទិន្នន័យសៀរៀល។ តាមរយៈការតភ្ជាប់ DAC ខាងក្រៅ ទិន្នន័យដំណើរការអាចត្រូវបានពិនិត្យជាទម្រង់រលកដោយប្រើ oscilloscope ជាដើម។
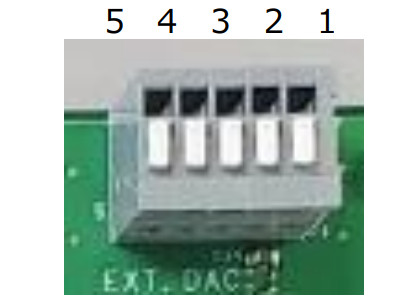 រូបភាពទី 4-9 ឧបករណ៍ភ្ជាប់ DAC ខាងក្រៅ (J4)
រូបភាពទី 4-9 ឧបករណ៍ភ្ជាប់ DAC ខាងក្រៅ (J4)
តារាង 4.4 លក្ខណៈបច្ចេកទេសឧបករណ៍ភ្ជាប់ DAC ខាងក្រៅ
| ម្ជុល | មុខងារ | សុន្ទរកថា | |
| 1 | ឌីវីឌីឌី | ទិន្នផលថាមពល 5 V | |
| GND | GND | ||
| 3 | ធ្វើសមកាលកម្ម | សញ្ញាសមកាលកម្ម DAC | ប្រើ GPIO |
| 4 | SDO | ទិន្នន័យ DAC | ប្រើ SIO |
| 5 | អេសអិលខេ | នាឡិកា DAC | ប្រើ SIO |
៤.១.៩. ឧបករណ៍ភ្ជាប់បំបាត់កំហុស (J4.1.9)
ឧបករណ៍ភ្ជាប់ 20-pin សម្រាប់ភ្ជាប់ទៅការស៊ើបអង្កេតកម្មវិធីត្រាប់តាម/បំបាត់កំហុស។ វាអនុលោមតាមស្តង់ដារឧបករណ៍ភ្ជាប់ MIPI-20 និងគាំទ្រតែចំណុចប្រទាក់ SWD ប៉ុណ្ណោះ។
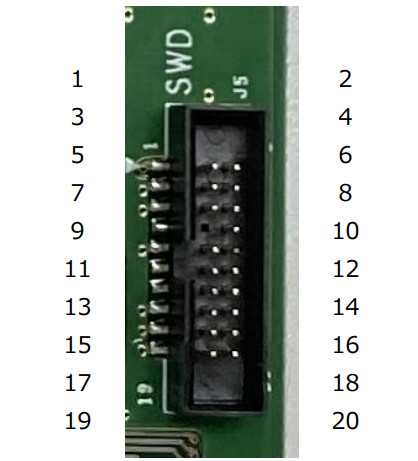 រូប ៤.១០. ឧបករណ៍ភ្ជាប់បំបាត់កំហុស (J4.10)
រូប ៤.១០. ឧបករណ៍ភ្ជាប់បំបាត់កំហុស (J4.10)
តារាង 4.5 លក្ខណៈបច្ចេកទេសឧបករណ៍ភ្ជាប់បំបាត់កំហុស
| ម្ជុល | មុខងារ | ម្ជុល | មុខងារ |
| 1 | VDD(5 វី) | 2 | ស៊ី។ ឌីអូ |
| 3 | GND | 4 | SWCLK |
| 5 | GND | 6 | SWV |
| 7 | (nc) | 8 | (nc) |
| 9 | GND | 10 | កំណត់ឡើងវិញ |
| 11 | (nc) | 12 | (nc) |
| 13 | (nc) | 14 | (nc) |
| 15 | GND | 16 | (nc) |
| 17 | GND | 18 | (nc) |
| 19 | GND | 20 | (nc) |
៤.២. ការត្រួតពិនិត្យប្រតិបត្តិការ
4.2.1. ការរៀបចំ
ភ្ជាប់ម៉ូទ័រ BLDC 3 ដំណាក់កាលទៅឧបករណ៍ភ្ជាប់ម៉ូទ័រ (J2) ។ ភ្ជាប់ការផ្គត់ផ្គង់ថាមពល DC ទៅឧបករណ៍ភ្ជាប់ថាមពលម៉ូទ័រ (J1) ។ កំណត់កុងតាក់ S_SW2 (វិធីសាស្ត្រគ្រប់គ្រង MCU) នៅលើក្តារទៅបិទ (ការគ្រប់គ្រង MCU តែមួយ)។ បើកថាមពលតាមលំដាប់ដូចខាងក្រោមៈ ថាមពលបញ្ជា (5 V) ឧបករណ៍ភ្ជាប់បញ្ចូល (J10) → ថាមពលបញ្ជា (15 V) ឧបករណ៍ភ្ជាប់បញ្ចូល (J13) → ឧបករណ៍ភ្ជាប់ថាមពលម៉ូទ័រ (J1) ។
4.2.2. វិធីសាស្រ្តប្រតិបត្តិការ
ម៉ូទ័រស្ថិតក្នុងស្ថានភាពឈប់នៅពេលដែល potentiometer (VR1) ស្ថិតនៅក្នុងទីតាំង Min-position (0 Hz)។ ម៉ូទ័រអាចត្រូវបានចាប់ផ្តើមដោយបង្កើនការកំណត់ potentiometer (VR1) ពីទីតាំងអប្បបរមា (0 Hz) ។ ប្រសិនបើម៉ូទ័រត្រូវបានបញ្ឈប់នៅពេលដែល potentiometer មិនស្ថិតនៅក្នុងទីតាំង MIN សូមប្តូរ VR1 ទៅទីតាំង Min ម្តង។ ខណៈពេលដែលស្ថិតនៅក្នុងស្ថានភាពឈប់ LED1, LED2 និង LED3 ត្រូវបានបិទ។
បន្ទាប់ពីដំណើរការម៉ូទ័រចាប់ផ្តើម ល្បឿនអាចប្រែប្រួលដោយប្រើ VR1។ VR1 កាន់តែខិតទៅជិតទីតាំងអតិបរមា (60 Hz) ល្បឿនបង្វិលកាន់តែលឿន។ វាកាន់តែខិតទៅជិតទីតាំង Min ល្បឿនបង្វិលកាន់តែយឺត។ នៅពេលដែល S_SW3 (ទិសដៅបង្វិល) បើក ម៉ូទ័របង្វិលក្នុងទិសដៅ CW (ទ្រនិចនាឡិកា) ហើយនៅពេលដែលវាបិទ ម៉ូទ័របង្វិលក្នុងទិសដៅ CCW (ច្រាសទ្រនិចនាឡិកា)។
៤.២.៣. ប្រតិបត្តិការនៅពេលរកឃើញភាពមិនប្រក្រតី
ប្រសិនបើរកឃើញកំហុសខាងក្រោម ប្រព័ន្ធនឹងចូលទៅក្នុងស្ថានភាព EMG (Emergency) ម៉ូទ័រឈប់ ហើយ LED1 ភ្លឹបភ្លែតៗ ឬបើក។
- វ៉ុលមិនធម្មតាtage ការរកឃើញ: នៅពេលដែលមិនធម្មតា voltage ត្រូវបានរកឃើញ LED1 ភ្លឹបភ្លែតៗក្នុងរយៈពេល 250 ms ។
- ការរកឃើញចរន្តមិនប្រក្រតី៖ នៅពេលរកឃើញចរន្តមិនប្រក្រតី LED1 នឹងភ្លឹបភ្លែតៗក្នុងរង្វង់ 500 ms ។
- ការរកឃើញចរន្តលើសនៃកម្មវិធី៖ នៅពេលរកឃើញចរន្តលើសដោយប្រើដំណើរការកម្មវិធី នោះ LED1 នឹងភ្លឹបភ្លែតៗក្នុងរយៈពេល 1 វិនាទី។
- ការរកឃើញចរន្តលើសនៃផ្នែករឹង៖ នៅពេលរកឃើញចរន្តលើសដោយប្រើមុខងារផ្នែករឹង MCU LED1 បើក។
ស្ថានភាព EMG ត្រូវបានលុបចោលដោយទម្លាក់ VR1 ទៅទីតាំង MIN ។
៤.៣. ការប្រុងប្រយ័ត្នសម្រាប់ការប្រើប្រាស់
យកចិត្តទុកដាក់ជាពិសេសចំពោះចំណុចខាងក្រោមនៅពេលដំណើរការ។
- ការកំណត់ Jumper មុនពេលបញ្ចូលថាមពលត្រូវតែបញ្ជាក់។ ជាពិសេសការកំណត់ 3-shunt/1-shunt solder jumper ត្រូវតែត្រួតពិនិត្យ។
- បន្ទាត់រាងប៉ូលនៃឧបករណ៍ភ្ជាប់ និងស្ថានីយត្រូវតែត្រឹមត្រូវ។
- capacitor រលោងនៅលើការផ្គត់ផ្គង់ថាមពលរបស់ម៉ូទ័រត្រូវចំណាយពេលប្រហែល 10 នាទីដើម្បីបញ្ចេញថាមពលពេញលេញ។ ទោះបីជាបន្ទាប់ពីបិទថាមពលក៏ដោយ ក៏បន្ទះមិនត្រូវប៉ះរហូតដល់ LEDP1 បិទ។
- កំឡុងពេលប្រតិបត្តិការ ក្តារត្រូវតែគ្របដោយស្រោម acrylic ដើម្បីសុវត្ថិភាព។
ល័ក្ខខ័ណ្ឌនៃការប្រើប្រាស់
លក្ខខណ្ឌនៃការប្រើប្រាស់នេះធ្វើឡើងរវាង Toshiba Electronic Devices and Storage Corporation (“We”) និងអតិថិជនដែលប្រើប្រាស់ឯកសារ និងទិន្នន័យដែលត្រូវបានពិគ្រោះយោបល់ក្នុងការរចនាកម្មវិធីអេឡិចត្រូនិចដែលឧបករណ៍ semiconductor របស់យើងត្រូវបានម៉ោន (“ការរចនាឯកសារយោងនេះ”)។ អតិថិជនត្រូវគោរពតាមលក្ខខណ្ឌនៃការប្រើប្រាស់ទាំងនេះ។ សូមចំណាំថា វាត្រូវបានសន្មត់ថា អតិថិជនយល់ព្រមនឹងលក្ខខណ្ឌប្រើប្រាស់ណាមួយ និងទាំងអស់នេះ ប្រសិនបើអតិថិជនទាញយកការរចនាយោងនេះ។ យើងអាចផ្លាស់ប្តូរ កែប្រែ កែប្រែ បន្ថែម និង/ឬដកផ្នែកណាមួយនៃលក្ខខណ្ឌនៃការប្រើប្រាស់នេះចេញនៅពេលណាក៏បាន ដោយមិនមានការជូនដំណឹងជាមុនណាមួយឡើយ។ យើងអាចបញ្ចប់លក្ខខណ្ឌនៃការប្រើប្រាស់ទាំងនេះនៅពេលណាក៏បាន និងសម្រាប់ហេតុផលណាមួយ។ នៅពេលបញ្ចប់លក្ខខណ្ឌនៃការប្រើប្រាស់ទាំងនេះ អតិថិជនត្រូវបំផ្លាញការរចនាឯកសារយោងនេះ។ ក្នុងករណីមានការរំលោភបំពានណាមួយដោយអតិថិជន អតិថិជនត្រូវបំផ្លាញការរចនាឯកសារយោងនេះ ហើយផ្តល់ការបញ្ជាក់ជាលាយលក្ខណ៍អក្សរមកយើងដើម្បីបញ្ជាក់អំពីការបំផ្លិចបំផ្លាញនោះ។
ការដាក់កម្រិតលើការប្រើប្រាស់
- ការរចនាឯកសារយោងនេះត្រូវបានផ្តល់ជូនតែមួយគត់ជាទិន្នន័យយោងសម្រាប់ការរចនាកម្មវិធីអេឡិចត្រូនិក។ អតិថិជនមិនត្រូវប្រើការរចនាយោងនេះសម្រាប់គោលបំណងផ្សេងទៀត រួមទាំងការផ្ទៀងផ្ទាត់ភាពអាចជឿជាក់បានដោយគ្មានដែនកំណត់។
- ការរចនាឯកសារយោងនេះគឺសម្រាប់ការប្រើប្រាស់ផ្ទាល់ខ្លួនរបស់អតិថិជន និងមិនមែនសម្រាប់លក់ ជួល ឬការផ្ទេរផ្សេងទៀតទេ។
- អតិថិជនមិនត្រូវប្រើការរចនាយោងនេះសម្រាប់ការវាយតម្លៃក្នុងសីតុណ្ហភាពខ្ពស់ ឬទាប សំណើមខ្ពស់ ឬបរិស្ថានអេឡិចត្រូម៉ាញ៉េទិចខ្ពស់នោះទេ។
- ការរចនាឯកសារយោងនេះមិនត្រូវប្រើសម្រាប់ ឬបញ្ចូលទៅក្នុងផលិតផល ឬប្រព័ន្ធណាមួយដែលការផលិត ការប្រើប្រាស់ ឬការលក់ត្រូវបានហាមឃាត់ក្រោមច្បាប់ ឬបទប្បញ្ញត្តិជាធរមានណាមួយឡើយ។
ដែនកំណត់
- ចំពោះការរចនាឯកសារយោងនេះ ដោយគ្មានការជូនដំណឹងជាមុន។
- ការរចនាឯកសារយោងនេះគួរតែត្រូវបានចាត់ទុកជាឯកសារយោងតែប៉ុណ្ណោះ។ យើងមិនទទួលខុសត្រូវចំពោះទិន្នន័យ និងព័ត៌មានដែលមិនត្រឹមត្រូវ ឬមិនពេញលេញណាមួយឡើយ។
- ឧបករណ៍ semiconductor អាចដំណើរការខុសប្រក្រតី ឬបរាជ័យ។ នៅពេលរចនាកម្មវិធីអេឡិចត្រូនិកដោយយោងទៅលើការរចនាយោងនេះ អតិថិជនត្រូវទទួលខុសត្រូវចំពោះការអនុលោមតាមស្តង់ដារសុវត្ថិភាព និងសម្រាប់ការផ្តល់នូវការរចនា និងការការពារគ្រប់គ្រាន់សម្រាប់ផ្នែករឹង កម្មវិធី និងប្រព័ន្ធរបស់ពួកគេ ដែលកាត់បន្ថយហានិភ័យ និងជៀសវាងស្ថានភាពដែលដំណើរការខុសប្រក្រតី ឬបរាជ័យនៃឧបករណ៍ semiconductor អាចបណ្តាលឱ្យ ការបាត់បង់អាយុជីវិតមនុស្ស របួសរាងកាយ ឬការខូចខាតទ្រព្យសម្បត្តិ រួមទាំងការបាត់បង់ទិន្នន័យ ឬអំពើពុករលួយ។ អតិថិជនក៏ត្រូវតែយោង និងអនុលោមតាមកំណែចុងក្រោយបំផុតនៃព័ត៌មានដែលពាក់ព័ន្ធទាំងអស់របស់យើង រួមទាំងដោយគ្មានដែនកំណត់ លក្ខណៈបច្ចេកទេស សន្លឹកទិន្នន័យ និងកំណត់ចំណាំកម្មវិធីសម្រាប់ឧបករណ៍ semiconductor ក៏ដូចជាការប្រុងប្រយ័ត្ន និងលក្ខខណ្ឌដែលមានចែងនៅក្នុង "សៀវភៅណែនាំអំពីភាពជឿជាក់នៃ semiconductor"។
- នៅពេលរចនាកម្មវិធីអេឡិចត្រូនិចដោយយោងទៅលើការរចនាយោងនេះ អតិថិជនត្រូវតែវាយតម្លៃប្រព័ន្ធទាំងមូលឱ្យបានគ្រប់គ្រាន់។ អតិថិជនទទួលខុសត្រូវទាំងស្រុងចំពោះគ្រប់ទិដ្ឋភាពនៃការរចនាផលិតផល ឬកម្មវិធីផ្ទាល់ខ្លួនរបស់ពួកគេ។ យើងសន្មត់ថាមិនមានទំនួលខុសត្រូវចំពោះការរចនាផលិតផល ឬកម្មវិធីរបស់អតិថិជន។
- គ្មានការទទួលខុសត្រូវណាមួយត្រូវបានសន្មត់ដោយពួកយើងសម្រាប់ការរំលោភលើប៉ាតង់ ឬសិទ្ធិកម្មសិទ្ធិបញ្ញាផ្សេងទៀតណាមួយរបស់ភាគីទីបីដែលអាចបណ្តាលមកពីការប្រើប្រាស់ការរចនាឯកសារយោងនេះ។ គ្មានអាជ្ញាប័ណ្ណចំពោះសិទ្ធិកម្មសិទ្ធិបញ្ញាណាមួយត្រូវបានផ្តល់ដោយលក្ខខណ្ឌនៃការប្រើប្រាស់នេះ ទោះជាបង្ហាញ ឬដោយបង្កប់ន័យដោយការបិទបាំង ឬបើមិនដូច្នេះទេ
- ការរចនាឯកសារយោងនេះត្រូវបានផ្តល់ជូន “ដូចដែល”។ យើង (ក) សន្មត់ថាមិនមានទំនួលខុសត្រូវអ្វីទាំងអស់ រួមទាំងដោយគ្មានដែនកំណត់ ដោយផ្ទាល់ ផលវិបាក ពិសេស ឬការខូចខាតដោយចៃដន្យ រួមទាំងការខាតបង់ដោយគ្មានដែនកំណត់ ការបាត់បង់ប្រាក់ចំណេញ ការបាត់បង់ឱកាស និងរាល់ការធានា ឬលក្ខខណ្ឌដែលបង្ហាញដោយប្រយោលដែលទាក់ទងនឹងការរចនាឯកសារយោងនេះ រួមទាំងការធានា ឬលក្ខខណ្ឌនៃការធ្វើពាណិជ្ជកម្ម ភាពសមស្រប សម្រាប់គោលបំណងជាក់លាក់ ភាពត្រឹមត្រូវ ភាពត្រឹមត្រូវ។
ការត្រួតពិនិត្យការនាំចេញ
អតិថិជនមិនត្រូវប្រើប្រាស់ ឬបើមិនដូច្នេះទេធ្វើឱ្យមានការរចនាយោងនេះសម្រាប់គោលបំណងយោធាណាមួយ រួមទាំងដោយគ្មានដែនកំណត់ សម្រាប់ការរចនា ការអភិវឌ្ឍន៍ ការប្រើប្រាស់ ការស្តុកទុក ឬការផលិតអាវុធនុយក្លេអ៊ែរ គីមី ឬជីវសាស្រ្ត ឬផលិតផលបច្ចេកវិទ្យាមីស៊ីល (អាវុធប្រល័យលោក)។ ការរចនាឯកសារយោងនេះអាចត្រូវបានគ្រប់គ្រងក្រោមច្បាប់ និងបទប្បញ្ញត្តិនាំចេញជាធរមាន រួមទាំងច្បាប់ស្តីពីការប្តូរប្រាក់ និងពាណិជ្ជកម្មបរទេសរបស់ជប៉ុន និងច្បាប់គ្រប់គ្រងការនាំចេញរបស់សហរដ្ឋអាមេរិក ដោយគ្មានដែនកំណត់។ ការនាំចេញ និងការនាំចេញឡើងវិញនៃការរចនាឯកសារយោងនេះត្រូវបានហាមឃាត់យ៉ាងតឹងរ៉ឹង លើកលែងតែការអនុលោមតាមកម្មវិធីទាំងអស់
- យើងរក្សាសិទ្ធិក្នុងការបង្កើតច្បាប់ និងបទប្បញ្ញត្តិនៃការនាំចេញ chanle ។
ច្បាប់គ្រប់គ្រង
លក្ខខណ្ឌនៃការប្រើប្រាស់ទាំងនេះត្រូវគ្រប់គ្រង និងបកស្រាយដោយច្បាប់របស់ប្រទេសជប៉ុន។
© 2022
សាជីវកម្មឧបករណ៍ផ្ទុកនិងរក្សាទុកគ្រឿងអេឡិចត្រូនិក Toshiba
ឯកសារ/ធនធាន
 |
TOSHIBA TPD4204F DC 300V បញ្ចូល BLDC Motor Sensorless សៀគ្វីត្រួតពិនិត្យ [pdf] ការណែនាំអ្នកប្រើប្រាស់ TPD4204F DC 300V Input BLDC Motor Sensorless Circuit Circuit, TPD4204F DC 300V Input BLDC Motor, Sensorless Control Circuit Motor, Sensor Less Circuit Motor, Motor, TPD4204F |



